Заявляемое изобретение относится к области машиностроения и может быть использовано в приводах машин для передачи вращающих моментов в условиях, когда оси соединяемых валов расположены с угловым и линейным смещением, в том числе и с совпадением угловых скоростей ведущего и ведомого вала.
Широко известен из уровня техники шарнир равных угловых скоростей Рцеппа, позволяющий осуществлять передачу крутящего момента в системах приводов управляемых колес автомобиля, который выполнен в виде двух кулаков, изготовленных как одно целое с валами (ведущими и ведомыми). В каждом кулаке выполнены по 4-6 канавки, в которые закладываются шарики от 4 до 6 штук и отдельно центрирующий шарик, который может удерживаться штифтом. При вращении валов в любую сторону крутящий момент передается от одного кулака к другому через шарики, которые лежат одновременно в канавках обоих кулаков. При изменении угла между вращающимися валами шарики устанавливаются сами в плоскости, расположенной на биссектрисе угла между осями валов, и осуществляют передачу крутящего момента при углах поворота колес до 30-32°. Недостатками таких шарниров являются небольшой угол поворота и необходимость точной фиксации валов в осевом направлении.
Известен шарнир равных угловых скоростей [патент РФ на изобретение №2289733, опубл. 20.12.2006 г.], который содержит две полумуфты, форма которых допускает взаимодействие с соединяемыми валами, и промежуточные тела качения. Первая полумуфта выполнена с внешней и внутренней сферическими соосными поверхностями, а вторая выполнена с внешней сферической поверхностью, причем все имеют общий центр. Обе полумуфты имеют пазы с коническими рабочими поверхностями в меридиональных плоскостях, в которых размещены ролики в форме усеченных конусов, установленные на оси, проходящей через овальное отверстие траверсы, имеющей два поводка со сферическими головками, размещенные в соответствующих отверстиях обеих полумуфт. Образующие всех рабочих конических поверхностей контактирующих деталей шарнира равных угловых скоростей сходятся в общем центре сферических поверхностей полумуфт.
Недостатком данного технического решения является ограниченный угол поворота, обусловленный механизмом взаимодействия элементов конструкции.
Известен сферический шарнир равных угловых скоростей [патент РФ на полезную модель №106316, опубл. 10.07.2011 г.], который содержит ведущий и ведомый валы, кулаки с круговой, центральной выборкой, выполненные совместно с валами и центрирующий шар, кулаки выполнены с прямым внешним углом и выборкой S-образной формы с радиусом кривизны R, а поверхность сердцевины шара -сферической. Технический результат при использовании полезной модели заключается в увеличении прочности шарнира, увеличении срока его службы при увеличении угла поворота между осями соединяемых валов до 60°.
Данные шарнир принят за прототип. Однако к его существенному недостатку можно отнести ограниченный угол поворота между осями соединяемых валов из-за перекрестного взаимного расположения кулаков, в результате чего после угла 60° нарастает биение. Кроме того, отсутствует механизм фиксации кулаков на центрирующем шаре.
Во всех известных технических решениях ограничен угол передачи силы вращения, поскольку имеется возможность передачи крутящего момента до тех пор, пока кулаки не касаются друг друга (не входят в соприкосновение), при взаимном вращении с касанием их тел, передача вращения прекращается.
Известна окружная машина [патент на изобретение RU 2651105, опубл. 18.04.2018 г.], содержащая внешний и внутренний контуры тел вращения и по меньшей мере один запорный элемент, причем каждое тело вращения содержит по меньшей мере одну часть сферы. При этом внутренний контур расположен во внешнем контуре с возможностью его вращения относительно внешнего контура так, что их оси наклонены относительно друг друга, а центры симметрии совпадают, и между ними образованы две рабочие полости, в каждой из которых имеются вход и выход. Каждый запорный элемент установлен во внутреннем контуре с возможностью взаимного перемещения относительно друг друга и вращения относительно внешнего контура и выполнен с возможностью разделения при своем движении каждой рабочей полости на зоны высокого и низкого давления и перемещения рабочего тела в каждой рабочей полости от входа к выходу, при этом внутренний контур создает места уплотнения по внутренней поверхности внешнего контура, а запорный элемент создает места уплотнения по внутренней поверхности внешнего контура и в местах установки во внутренний контур.
Недостатками известной машины являются: небольшой удельный объем из-за того, что запорные элементы ограничены по высоте и рабочий объем ограничен углом качания запорных элементов; ограниченное рабочее давление из-за контакта запорных элементов с внешним контуром вращения по геометрической линии, что не позволяет работать с высокими давлениями.
Техническим результатом заявляемого изобретения в части узла зацепления валов является увеличение угла поворота и нагрузочной способности, а также снижении шумности зацепления по сравнении с зубчатыми зацеплениями.
Заявляемый технический результат в части узла зацепления валов, достигается за счет того, что узел зацепления валов, содержащий ведущий и ведомый валы, кулаки, соединенные с валами, и фиксирующий узел, согласно настоящему изобретению, содержит две лопасти, каждая из которых установлена на фиксирующем узле и выполнена с возможностью качения относительного него, при этом каждый кулак сопряжен с соответствующей лопастью с возможностью его перемещения относительно лопасти.
Возможны варианты, при которых:
- фиксирующий узел выполнен в виде вала;
- фиксирующий узел выполнен в виде диска;
- фиксирующий узел выполнен в виде совокупности двух валов, разнесенных параллельно;
- кулак имеет не менее чем один паз, а в лопасти выполнен не минее чем один выступ, образуя зацепление с возможностью движения лопасти внутри него;
- кулак имеет не менее чем один выступ, а в лопасти выполнен не менее чем один паз, образуя зацепление с возможностью движения кулака внутри нее;
- имеется по меньшей мере один корпус, в который помещены лопасти, фиксирующий узел и кулаки, при этом в корпусе выполнены отверстия для выхода из него валов.
Указанный технический результат достигается за счет того, что данная конструкция представляет собой зубчатую передачу постоянного зацепления, в которой лопасти выполняют роль двух постоянно зацепленных зубьев, что позволяет увеличить угол поворота между валами до 340 градусов, сохранив при этом равные угловые скорости на всем диапазоне. Одновременно с этим увеличивается нагрузочная способность благодаря увеличению площади контакта поверхностей, а именно кулаков и лопастей, лопастей и фиксирующего элемента, поскольку обеспечен постоянный контакт по поверхности, и отсутствие шума зацепления. Предлагаемая зубчатая передача имеет возможное применение при пересекающихся, скрещивающихся и параллельных осях, с передаточным отношением равным единице. Благодаря разделению осей, передающих вращение (расположили элемент зацепления кулаков на радиусах, расположили сами кулаки от центра вращения), взаимное касание кулаков происходит при большем угле. При этом в аналогах используется точка качения и две плоскости проходящие сквозь нее. В заявляемом решении используется точка качения, две плоскости, проходящие сквозь нее, и две окружные оси, лежащие в этих плоскостях. В аналогах через вилки проходит диаметральная ось качения, у нас диаметральная ось качения вынесена за пределы кулака, в лопасть.
Техническим результатом заявляемого изобретения в части сферической машины является увеличение удельного объема рабочей полости и повышение рабочего давления.
Заявляемый технический результат в части машины, достигается за счет того, что сферическая машина на основе узла зацепления валов содержит два вала, корпус, внутри которого расположены кулаки, соединенные с соответствующими валами, две лопасти и по меньшей мере один фиксирующий узел, причем в корпусе образовано по меньшей мере одно отверстие для прохода вала, и, по меньшей мере, один вход и, по меньшей мере, один выход, а лопасти установлены на фиксирующем узле с возможностью их качения относительно него, при этом с каждой лопастью сопряжен соответствующий кулак с возможностью его перемещения относительно лопасти, при этом в рабочих полостях между каждым кулаком и корпусом, каждым кулаком и каждой лопастью, каждой лопастью и корпусом, каждой лопастью и фиксирующим узлом, каждым кулаком и фиксирующим узлом, корпусом и фиксирующим узлом созданы места уплотнений.
Указанный технический результат достигается за счет того, что данная конструкция основана на узле зацепления валов, представляющем собой зубчатую передачу постоянного зацепления, в которой лопасти выполняют роль двух постоянно зацепленных зубьев, что позволяет увеличить угол поворота между валами до 340 градусов и, как результат, приводит к увеличению удельного объема рабочей полости. Одновременно с этим благодаря обеспечению мест уплотнения в виде поверхностей удается повысить рабочее давление.
Сущность заявляемой группы изобретений раскрыта на чертежах и в нижеследующем описании.
На Фиг. 1 представлен узел зацепления валов с внешним расположением кулаков относительно лопастей.
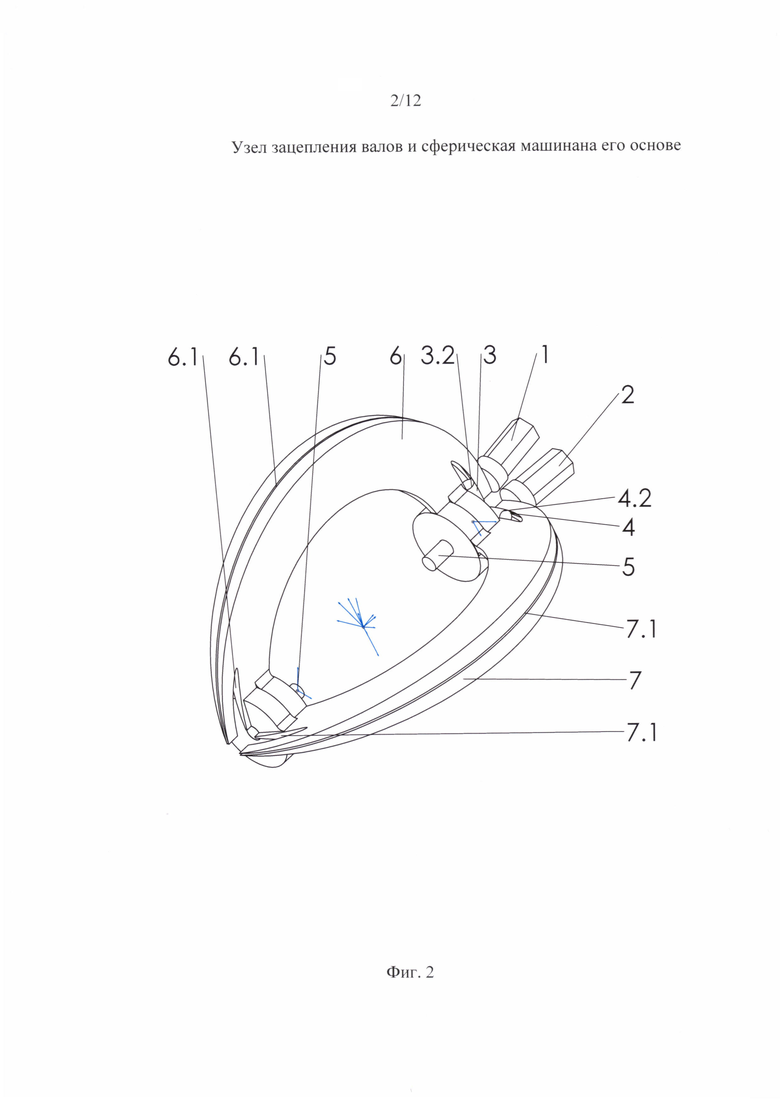
На Фиг. 2 представлен узел зацепления валов с расположением кулаков внутри лопастей.
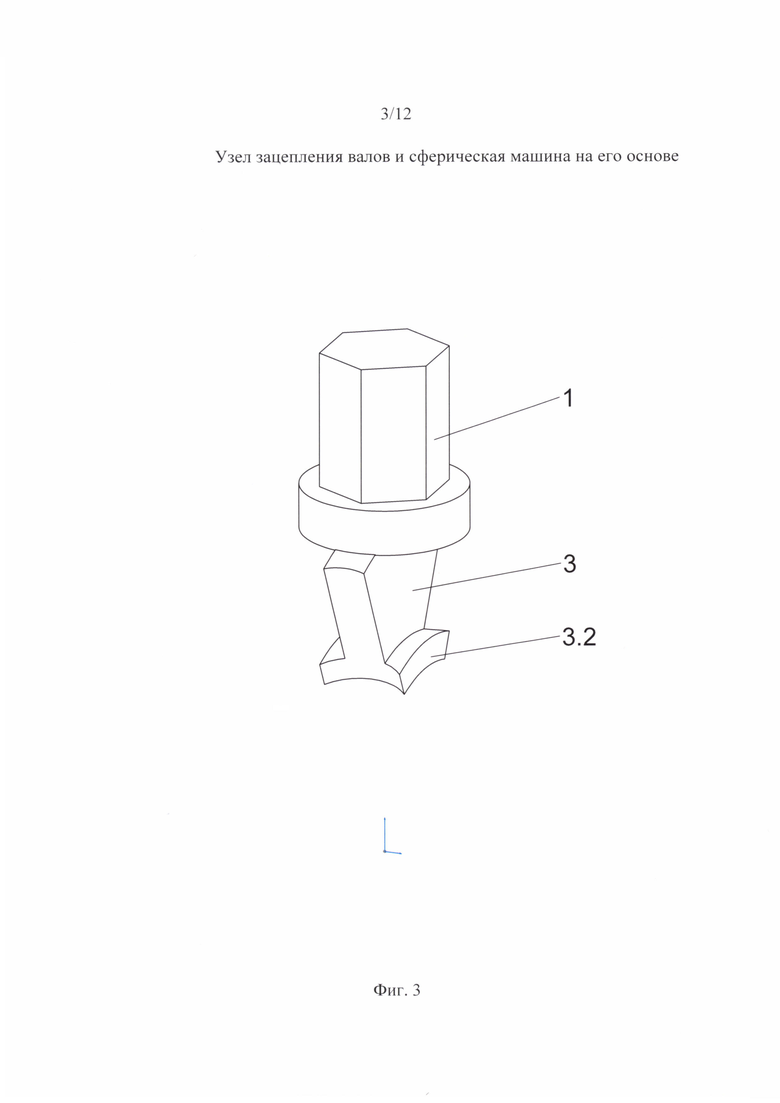
На Фиг. 3 представлен Т-образный кулак.
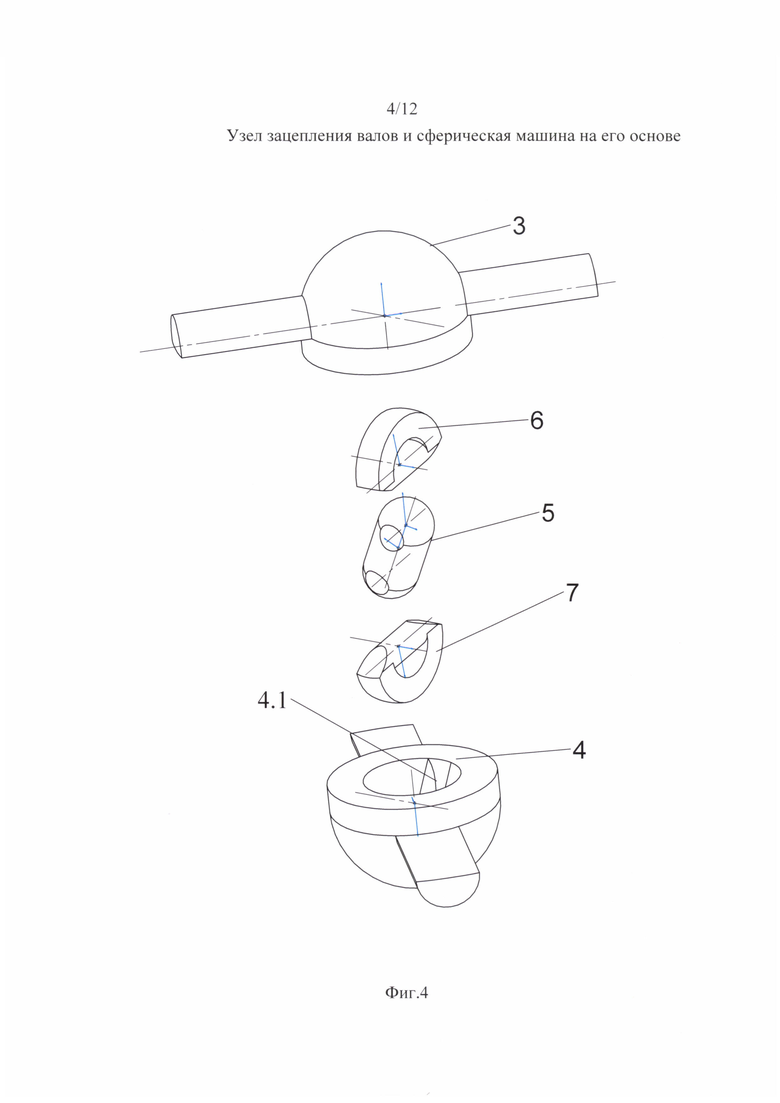
На Фиг. 4 представлен узел зацепления валов с фиксирующем узлом в виде стержня с отверстиями для установки лопастей и кулаков с выемкой для лопастей.
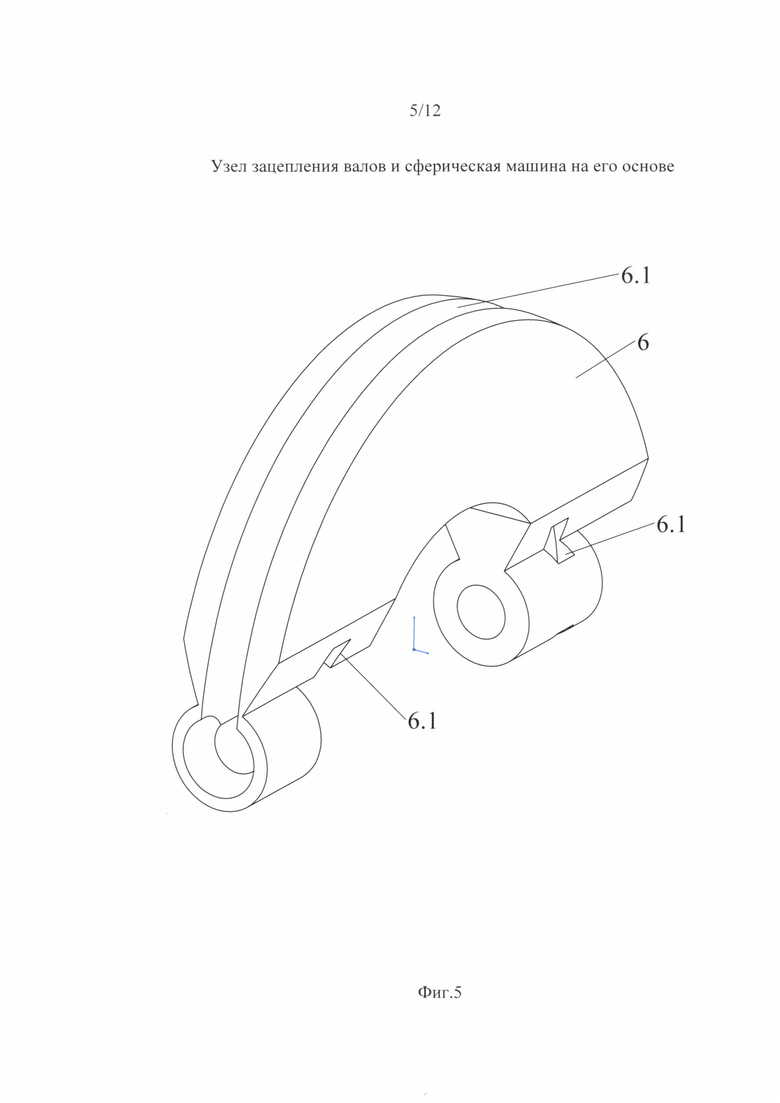
На Фиг. 5 представлена лопасть для внутреннего зацепления с Т-образным кулаком.
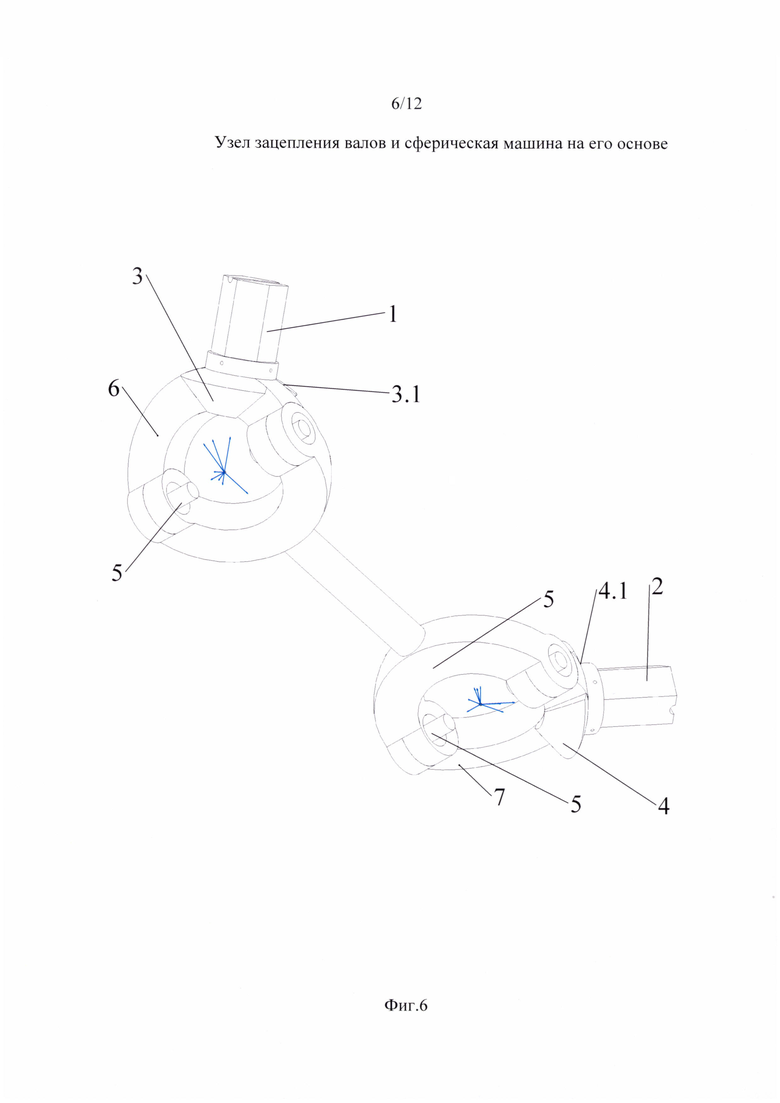
На Фиг. 6 представлен узел зацепления валов с фиксирующим узлом в виде двутавровой балки.
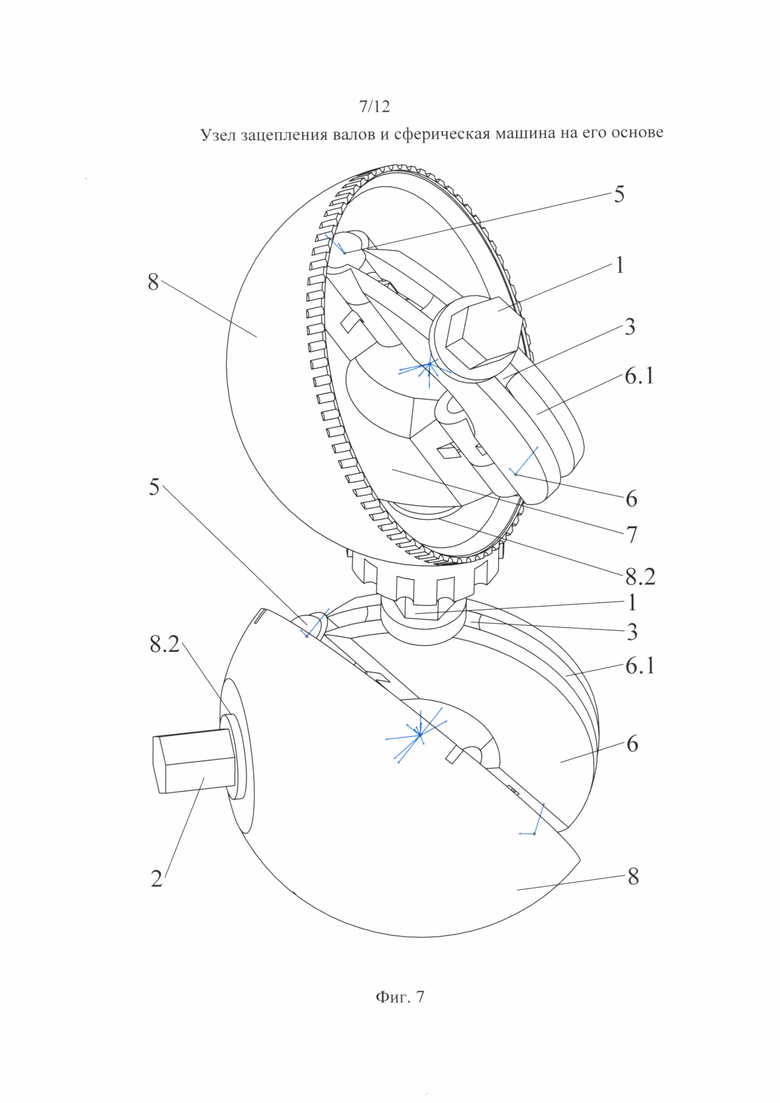
На Фиг. 7 представлено соединение двух узлов зацепления валов в корпусах.
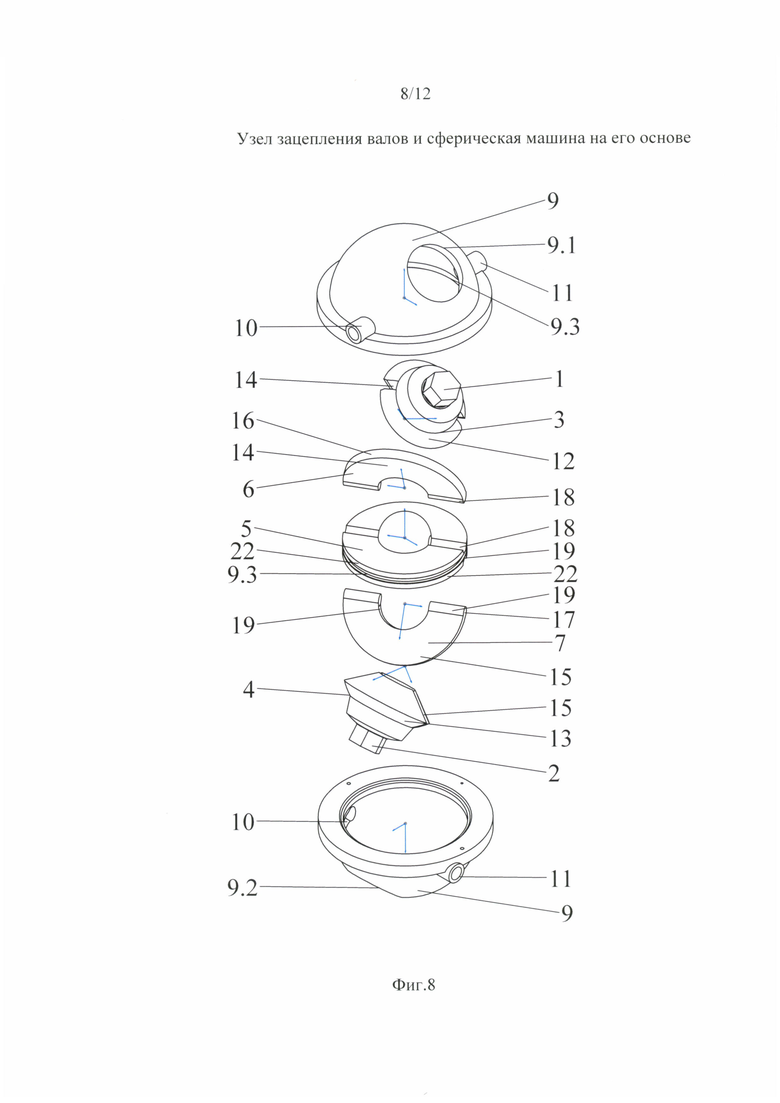
На Фиг. 8 представлена сферическая машина (разнесенная сборка) с подвижным фиксирующим узлом.
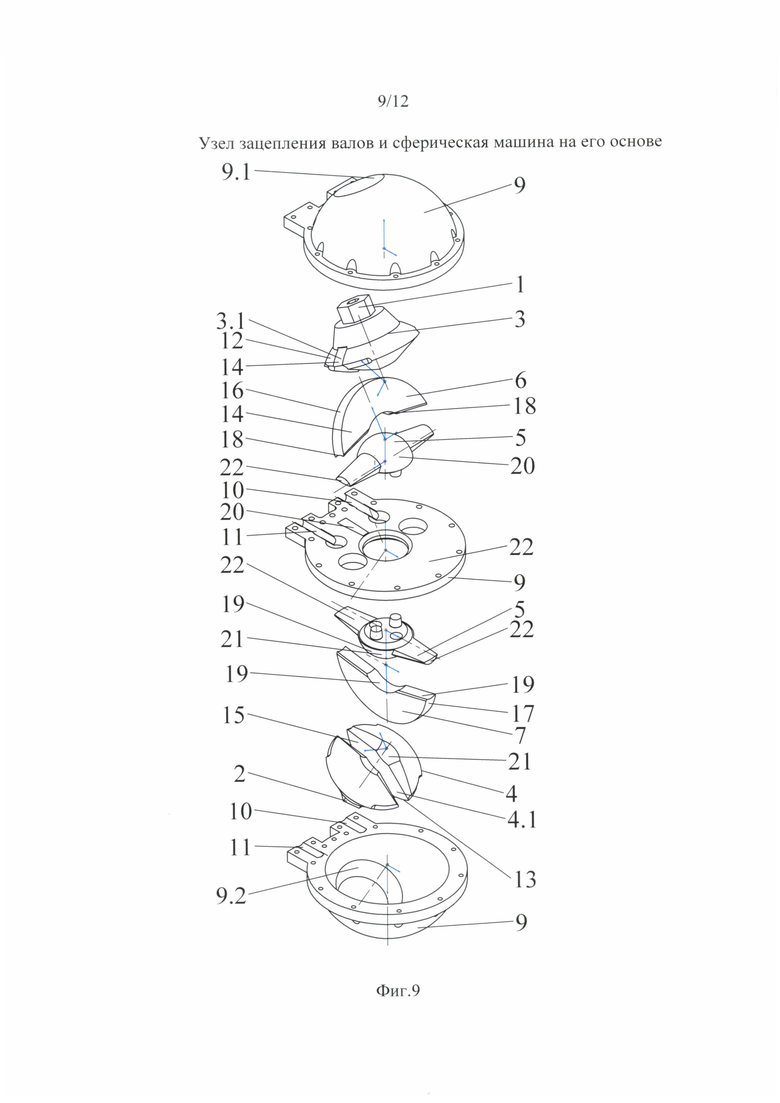
На Фиг. 9 представлена сферическая машина (разнесенная сборка) с несоосным расположением валов и с фиксирующим узлом, состоящим из неподвижного основания и подвижных уплотнительных элементов.
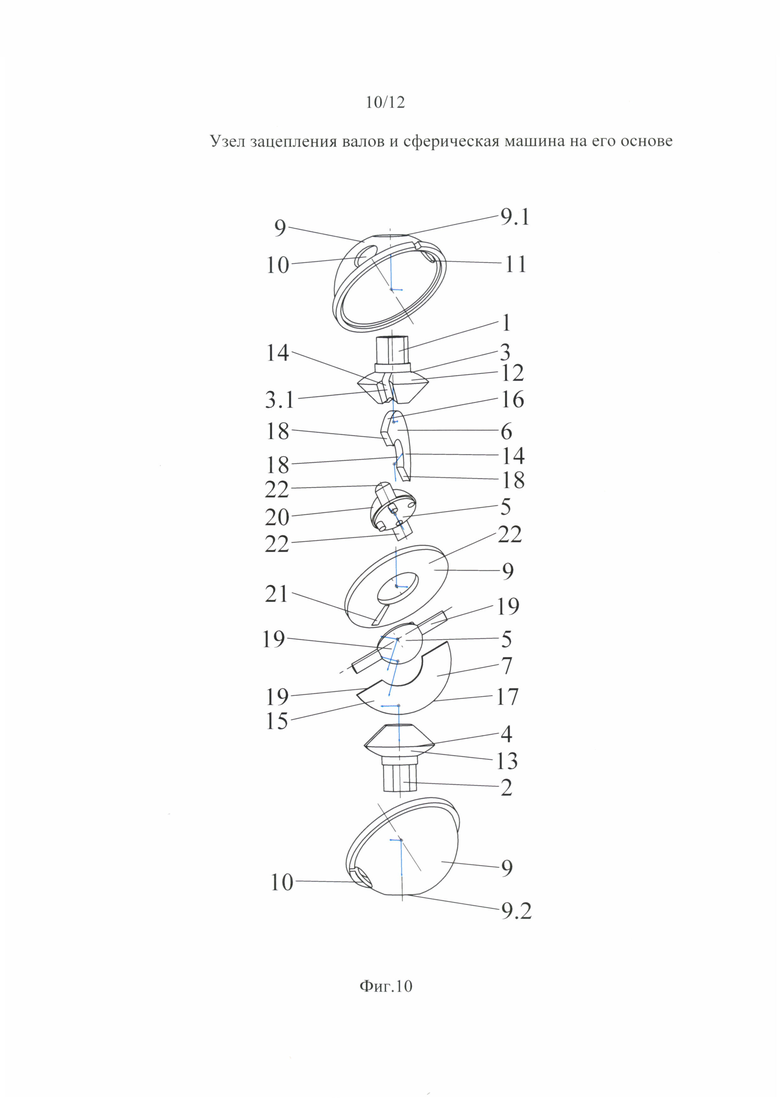
На Фиг. 10 представлена сферическая машина (разнесенная сборка) с соосным расположением валов и с фиксирующим узлом, состоящим из неподвижного основания и подвижных уплотнительных элементов.
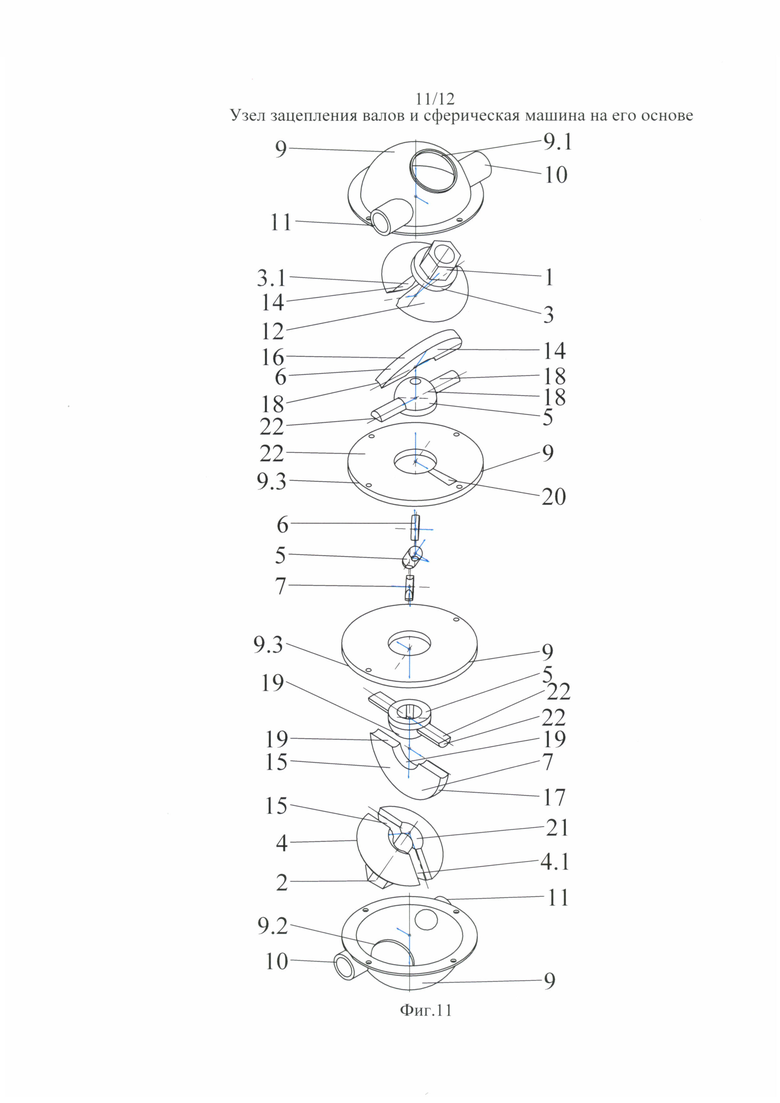
На Фиг. 11 представлена сферическая машина (разнесенная сборка) с соосным расположением валов и с фиксирующим узлом, состоящим из двух неподвижных оснований и подвижных уплотнительных элементов, при этом между основаниями размещен шарнир, представляющий собой заявляемый узел зацепления валов.
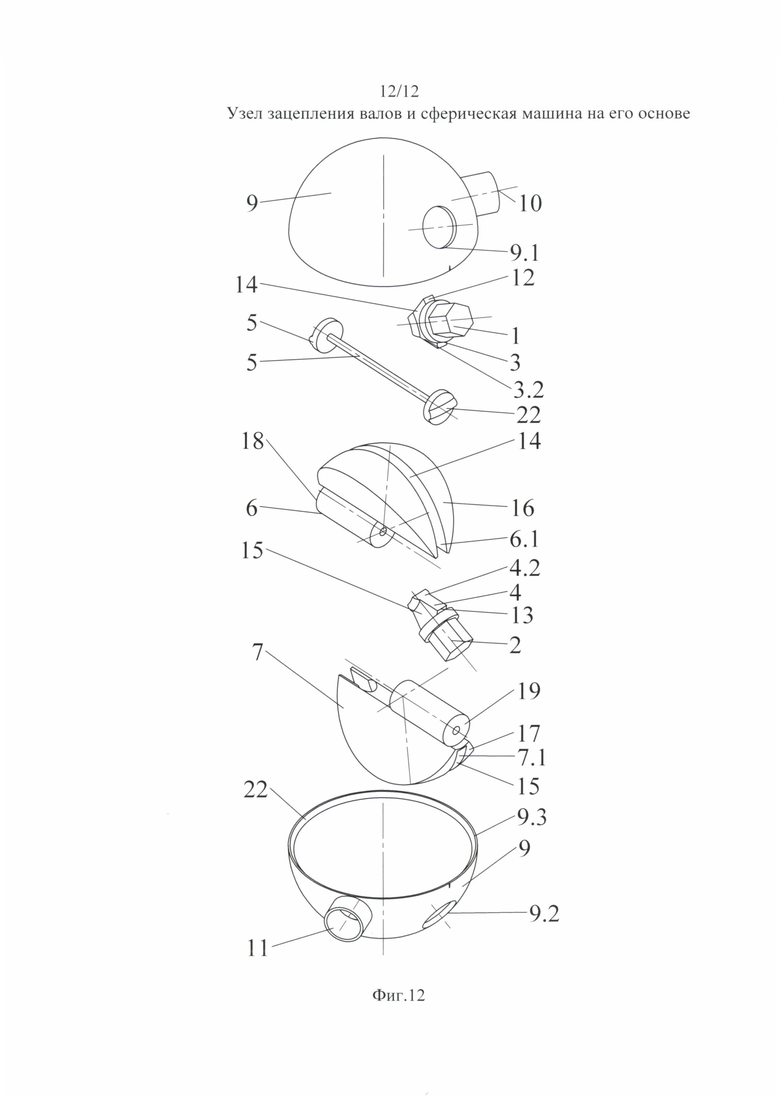
На Фиг. 12 представлена сферическая машина (разнесенная сборка) с несоосным расположением валов, с внутренним зацеплением кулаков и лопастей, с фиксирующим узлом, выполненным в виде вала.
На фигурах обозначено:
1 - ведущий вал;
2 - ведомый вал;
3 - кулак, соединенный с ведущим валом;
3.1 - паз для захода в него лопасти;
3.2 - выступ для захода в лопасть;
4 - кулак, соединенный с ведомым валом;
4.1 - паз для захода в него лопасти;
4.2 - выступ для захода в лопасть;
5 - фиксирующий узел;
6 - ведущая лопасть;
6.1- паз для захода в него кулака;
7 - ведомая лопасть;
7.1- паз для захода в него кулака;
8 - корпус;
8.1 - отверстие в корпусе для ведущего вала;
8.2 - отверстие в корпусе для ведомого вала;
9 - корпус сферической машины;
9.1 - отверстие в корпусе для ведущего вала;
9.2 - отверстие в корпусе для ведомого вала;
9.3 - окружная ось вращения фиксирующего узла 5;
10 - вход;
11 - выход;
12 - место уплотнения между кулаком 3 и корпусом 9;
13 - место уплотнения между кулаком 4 и корпусом 9;
14 - место уплотнения между кулаком 3 и лопастью 6;
15 - место уплотнения между кулаком 4 и лопастью 7;
16 - место уплотнения между лопастью 6 и корпусом 9;
17 - место уплотнения между лопастью 7 и корпусом 9;
18 - место уплотнения между лопастью 6 и фиксирующим узлом 5;
19 - место уплотнения между лопастью 7 и фиксирующим узлом 5;
20 - место уплотнения между фиксирующим узлом 5 и кулаком 3;
21 - место уплотнения между фиксирующим узлом 5 и кулаком 4;
22 - место уплотнения между фиксирующим узлом 5 и корпусом 9.
Узел зацепления валов (Фиг. 1-12) содержит ведущий вал 1 и ведомый вал 2, кулаки 3 и 4, соединенные с валами 1 и 2, соответственно, фиксирующий узел 5, ведущую лопасть 6 и ведомую лопасть 7, каждая из которых установлена на соответствующем фиксирующем элементе 5 и выполнена с возможностью качения относительного него, а каждый кулак 3 и 4 сопряжен с соответствующей лопастью 6 и 7 с возможностью его перемещения относительно лопасти.
Фиксирующий узел 5 может быть выполнен в виде вала (Фиг. 4, 12), на который насажены обе лопасти 6 и 7 или совокупности двух валов или конусов, разнесенных на расстояние по одной оси (Фиг. 1, 2). Кроме того, фиксирующий узел 5 может быть выполнен в виде двутавровой балки (Фиг. 6). При этом фиксирующий узел 5 всегда должен быть расположен между валами 1 и 2.
Возможен вариант, при котором в каждом кулаке 3 и 4 может быть образован паз 3.1 и 4.1, в который заходит соответствующая лопасть 6 и 7, образуя зацепление с возможностью движения каждого кулака 3 и 4 относительно соответствующей лопасти 6 и 7 по ее поверхности (Фиг. 1). При этом возможен вариант, когда для фиксации кулака 3 и 4 в его пазу выполнен выступ, а по торцу лопасти 6 и 7 выполнена канавка для сопряжения с выступом (Фиг. 1).
Возможен другой вариант, при котором каждый кулак 3 и 4 имеет выступ 3.2 и 4.2, а в каждой лопасти 6 и 7 выполнен соответствующий паз 6.1 и 7.1 для обеспечения удержания кулаков 3 и 4 в лопастях 6 и 7.
Выступ 3.2 и 4.2 может быть выполнен Т-образной формы (Фиг. 3), а в лопастях 6 и 7 выполнен Т-образный паз, в который заходит соответствующий кулак 3 и 4, образуя зацепление (типа «ласточкин хвост») с возможностью движения относительно соответствующей лопасти 6 и 7 внутри нее.
Выступ 3.2 и 4.2 также может быть выполнен кольцеобразной или другой формы (Фиг. 4, 12), т.е. содержать стенку и участок выступа, входящий в зацепление с внутренним пазом 6.1 и 7.1 соответствующей лопасти 6 и 7.
Кулаки 3 и 4 могут быть несимметричны (с разными выемками или/и пазами, и размерами лопастей) но с радиальной центровкой вокруг точки передачи силы вращения и фиксирующего узла. При сохранении принципа взаимодействия элементов это значения не имеет, так как работоспособность конструкции зависит от возможности взаимодействия элементов по выявленным правилам, а не только от их формы их поверхности.
Лопасти 6 и 7, каждый фиксирующий элемент 5 и кулаки 3 и 4 могут быть помещены в корпус 8 (Фиг. 7), в котором выполнены отверстия 8.1 и 8.2 для выхода из него валов 1 и 2. Корпус 8 может быть выполнен из двух симметричных частей, с возможностью фиксации поворота относительно друг друга, для возможности (зеркального) симметричного изменения относительно лопастей наклона осей валов, перемещающихся относительно друг друга, и отверстия 8.1 и 8.2 должны быть расположены так, чтобы при взаимодействии всех частей обеспечить возможность угла поворота между валами на максимально возможный угол.
Лопасть 6 и 7 может иметь также радиальную выемку или паз, позволяющий качение и удержание кулака 3 и 4 в плоскости, параллельной диаметральной оси, на радиусе от центра качения.
Фиксирующий узел 5 может быть выполнен в виде диска с пазами для лопастей 6 и 7 и с частью сферы (Фиг. 8) или двух дисков, соединенных осью.
Фиксирующий узел 5 может быть выполнен в виде части сферы (Фиг. 9, 10, 11) с двумя выступами для лопастей 6 и 7.
Фиксирующий узел 5 может быть выполнен в виде частей сферы на торцах вала (Фиг. 4) с двумя отверстиями для лопастей 6 и 7.
Фиксирующий узел 5 может быть выполнен в виде шара или частей его, от которого выполнены выступы для захода в них лопастей, и предназначен для создания уплотнения. Фиксирующий узел 5 может быть выполнен в виде вала, или частей его с установленной в центре возможного вращения части сферы, или вала с двумя отверстиями, расположенными перпендикулярно его оси.
Вращение ведущего кулака преобразуется в качание ведущей лопасти с ее вращением относительно центра фиксирующего узла, который передает качание лопасти с ее вращением ведомой лопасти, затем ведомому кулаку имеющему возможность только вращения.
Увеличение угла поворота происходит за счет возможности качания лопастей до их соприкосновения или до соприкосновения кулаков, расположенных с внешних сторон лопастей (что в результате дает меньший угол, чем расположение кулаков в лопасти).
Взаимное расположение валов может быть параллельным, перекрестным и с пересечением.
Возможно два варианта совпадения осей валов.
1. Оси валов пересекаются в центре фиксирующего узла.
Преимущества: минимальные габаритные размеры, максимальный угол наклона между валами, за счет увеличения угла продольного скольжения кулаков относительно лопастей.
Недостатки: при максимальном угле наклона между валами площадь поверхностей кулака, создающая (пары сил вращения) плечи сил вращения лопастей, ограничена максимальным углом наклона между валами, что и ограничивает крутящий момент передаваемый валами. Для соосного соединения двух валов с помощью предложенного зацепления их оси должны пересекаться.
2. Оси валов не пересекаются в центре фиксирующего узла.
Преимущества: для соединения валов при их произвольном расположении с возможностью компенсации эксцентричности колебаний и вибраций ведомого вала.
На Фиг. 1 представлен узел зацепления валов с внешним расположением кулаков 3 и 4 относительно лопастей 6 и 7, с зацеплением кулаков 3 и 4 по внутренней части лопастей 6 и 7.
На Фиг. 1 угол наклона между ведущим и ведомым валом 1 и 2 установлен 90 градусов, который может изменяться до -90 градусов.
Для уменьшения поверхностей скольжения и разнесения сил вращения к краям кулака 3 и 4, по центру кулака 3 и 4 выполнен дополнительный паз поверх пазов 3.1 и 4.1.
Назначение: шарнир равных угловых скоростей, предназначенный для передачи сил вращения между валами под углом 180 градусов и более (в зависимости от соотношений размеров элементов), действующий только на пересечении осей валов. Может использоваться как зубчатая угловая передача с пересекающимися осями с передаточным числом равным единице.
На Фиг. 2 представлен узел зацепления валов с расположением кулаков внутри лопастей.
На Фиг. 2 угол наклона между ведущим и ведомом валом 1 и 2 доходит до 340 градусов, то есть +/- 170 градусов от их соосного расположения.
Круговая ось вращения фиксирующего узла 5 проходит через биссектрису угла, образованного валами 1 и 2 с центром, соответствующим центру фиксирующего узла 5.
Назначение: шарнир равных угловых скоростей, предназначенный для передачи усилия вращения между валами под углом до 340 градусов и более (в зависимости от соотношений размеров) с одним пересечением осей. Может использоваться как зубчатая угловая передача с пересекающимися осями.
На Фиг. 3 представлен Т-образный кулак.
Т- образный выступ предназначен для удержания кулаков 3 и 4 с валами 1 и 2 в пазах лопастей 6 и 7, с возможностью вращения кулаков 3 и 4 относительно центра узла зацепления. Т-образный выступ может иметь другую форму и иметь зацепление по внутренней поверхности лопасти 6 и 7. Кулак здесь служит для передачи усилия вращения от вала на лопасть.
На Фиг. 4 представлен узел зацепления валов с фиксирующим узлом в виде стержня.
Здесь оси валов 1 и 2 не совпадают с центром фиксирующего узла 5. Узел зацепления валов предназначен для передачи усилия вращения с равными угловыми скоростями между параллельно и встречно расположенными валами 1 и 2. Использовано в Фиг. 11 для соосного расположения ведущей и ведомой оси. Для увеличения нагрузочной способности все элементы имеют формы по поверхности взаимодействия. Может использоваться как зубчатое зацепление с коэффициентом передачи 1 между параллельными валами.
На Фиг. 5 представлена лопасть для внутреннего зацепления с Т-образным кулаком.
Паз 6.1 проходит с одной стороны сквозь лопасть 6 для возможности установки в лопасть кулака 3.
На торце лопасти выполнен сферический паз для установки направляющего шарика для возможности вращения торца лопасти по круговой оси.
На Фиг. 6 представлен узел зацепления валов с фиксирующим узлом в виде двутавровой балки.
Здесь оси валов 1 и 2 не совпадают с центром фиксирующего узла 5.
Фиксирующий узел 5 в виде двутавровой балки с двумя осями лопастей 6 и 7, расположенных в плоскости, предназначен для передачи усилия вращения между валами 1 и 2 с перекрещивающимися или пересекающимися осями по кратчайшей траектории. На фиксирующем узле 5 возможна установка подвижного шлицевого соединения для возможности изменения длинны узла зацепления валов, с возможностью изменения расстояния между валами 1 и 2, при действии внешних сил (трансмиссия транспортного средства). Может использоваться как перекрестное или параллельное зубчатое зацепление с коэффициентом передачи 1 между двумя валами. Вращение торцов лопастей по круговым осям обеспечено возможностью осевого вращения средней части двутавровой балки.
На Фиг. 7 представлено соединение двух узлов зацепления валов в корпусах 8.
Поворот любого корпуса 8 изменяет расположение и угол ведомого вала (при неподвижном ведущем вале), что позволяет при вращении ведущего вала 1, за счет фиксирующих устройств с приводом от ведущего вала (или внешними приводами вращения с возможностью фиксации) управлять взаимным положением двух узлов (и более) зацепления валов, что позволяет использовать это соединение в качестве управляемого многозвенного шарнира, имеющего требуемое количество степеней свободы, например, устройство позиционирования режущего инструмента, устройство для внутренней очистки изогнутых труб, с возможностью выбора разветвлений. Соединение позволяет укладывать его в виде спирали.
Соединение узлов зацепления позволяет передать усилие вращения с равными угловыми скоростями от ведущего вала 1 к ведомому валу 2 под углом, превышающем 360 градусов.
Направление передачи возможного вращения ведомого вала 2 по отношению к ведущему валу 1 зависит от положений корпусов 8.
Таким образом, равные угловые скорости зацепления возможны только при параллельно расположенных осях качания лопастей. Возможно применение инвертируемого шарнира и машины когда лопасти расположены навстречу.
Сферическая машина на основе узла зацепления валов содержит валы 1 и 2, корпус 9 (Фиг. 8-12).
Внутри корпуса 9 расположены кулаки 3 и 4, соединенные с соответствующими валами 1 и 2, две лопасти 6 и 7 и фиксирующий узел 5.
В корпусе 9 образованы отверстия 9.1 и 9.2 для прохода упомянутых валов 1 и 2, по меньшей мере один вход 10 и по меньшей мере один выход 11. Необязательно должны быть выполнены и отверстие 9.1, и отверстие 9.2, поскольку один из валов может не иметь выхода наружу.
Лопасти 6 и 7 установлены на соответствующем фиксирующем узле 5 с возможностью их качения относительно него, при этом с каждой лопастью 6 и 7 сопряжен соответствующий кулак 3 и 4 с возможностью его перемещения относительно соответствующей лопасти 6 и 7.
При этом между каждым кулаком 3 и 4 и корпусом 9 созданы места 12 и 13 уплотнений.
Между каждым кулаком 3 и 4 и каждой лопастью 6 и 7 созданы места 14 и 15 уплотнений.
Между каждой лопастью 6 и 7 и корпусом 9 созданы места 16 и 17 уплотнений. Между каждой лопастью 6 и 7 и фиксирующим узлом 5 созданы места 18 и 19 уплотнений.
Между фиксирующем узлом 5 и кулаком 3 создано место уплотнения 20. Между фиксирующем узлом 5 и кулаком 4 создано место уплотнения 21. Между фиксирующем узлом 5 и корпусом 9 создано место уплотнения 22.
Места уплотнений созданы путем контакта уплотнения по линии соприкосновения (Фиг. 8), между кулаками 3 и 4 с фиксирующим элементом 5 и места уплотнений созданы путем контакта уплотнения по поверхности соприкосновения (Фиг. 9, 10, 11, 12) между кулаками 3 и 4 с фиксирующим узлом 5, обозначены как 21 и 22.
Каждая лопасть 6 и 7 расположена так, что между сторонами лопастей 6 и 7, корпусом 9 и фиксирующим узлом 5 и кулаками 3, 4 образованы 2 или 3 рабочие полости, в зависимости от угла поворота фиксирующего элемента 5 в каждой из которых имеется отдельные (Фиг. 8, 10, 11) или совмещенные (Фиг. 9, 12) вход и выход 10 и 11.
Кулак может быть выполнен как тело вращения с прорезью для лопасти (Фиг. 8, 9, 10, 11) или с выступом соответствующем пазу лопасти (Фиг. 12).
Корпус 9 может быть выполнен в виде внутренних частей сфер из двух половин, соединенных между собой по центру сферы, или между центрами сфер.
На Фиг. 8 представлена сферическая машина (разнесенная сборка) с подвижным фиксирующим узлом и несоосным расположением валов.
Принцип работы в качестве насоса:
Рабочее тело поступает через входы 10 в полости, образованные между корпусом 9 поверхностями лопастей 6 и 7, кулаками 3 и 4 и с разных сторон фиксирующего узла 5, ограниченными уплотнениями, имеющими площадь: между кулаками 3, 4 и корпусом 9 поз.12,13, между кулаками 3, 4 и сторонами лопастей 6, 7 поз 14, 15, между торцами лопастей 6, 7 и корпусом 9 поз.16, 17, между краями лопастей 6, 7, имеющими форму тела вращения, с соответствующими им выемками в фиксирующем узле 5, и между центрами лопастей 6, 7 имеющих вырез в виде части сферы, соответствующий выступу в виде части сферы фиксирующего узла 5, и окружными параллельными уплотнения, расположенными между внутренними краями лопастей 6, 7 и соответствующими поверхностям вырезов в выступах в виде частей сфер фиксирующего узла 5, эти уплотнения обозначены поз.18 и 19, и уплотнениями между фиксирующим узлом 5 и кулаками 3, 4, имеющими вид линии.
Линии уплотнений между фиксирующим узлом 5 и кулаками 3, 4 ограничивают максимальное давление рабочего тела, на Фиг. 8 не обозначены. Линии уплотнений имеют возможность перемещения по сторонам фиксирующего узла 5.
Замкнутые полости увеличиваются и поворачивают лопасти 6, 7 совместно с кулаками 3, 4 и закрепленными в них валами 1, 2 за счет зацеплений по уплотнениям поз. 18 и 19.
Замкнутые полости увеличиваются в объеме до перекрытия лопастями входа 10 и последовательно замыкаются. Затем лопасти 6, 7 последовательно открывают выход 11, через который рабочее тело последовательно выходит из полостей.
Перекрестное расположение кулаков 3, 4 при параллельном соединении входов 10 и выходов 11 обеспечивает равномерное перемещение объемов рабочего тела.
По окружной оси 9.3 возможно установить подшипниковое устройство.
Лопасти 6, 7 входят в соответствующие пазы фиксирующего узла 5 и имеют возможность передать вращение через кулаки 3, 4 от ведущего вала 1 к ведомому валу 2 при возможности линейного изменения рабочих полостей.
Зацепление лопастей 6, 7 с пазами фиксирующего узла 5 возможно использовать в качестве зубчатой передачи с пересекающимися или скрещивающимися осями при возможности изменения угла наклона осей.
На Фиг. 9 представлена сферическая машина (разнесенная сборка) с несоосным расположением валов и с фиксирующим узлом, состоящим из неподвижного основания, расположенного во внутренней части корпуса 9, и подвижных уплотнительных элементов.
Имеется один вход 10 и один выход 11 за счет отверстий между рабочими полостями во внутренней части корпуса 9.
Передача сил вращения через часть корпуса 9 осуществляется за счет соединения уплотнительных элементов фиксирующих узлов 5.
В части корпуса 9 имеются уплотнения кулаков 3, 4 в виде выемок 22.
Так же созданы места уплотнений соответственно между каждым кулаком 3, 4 и фиксирующим узлом 5, корпусом 9 и фиксирующим узлом 5 - поз.20, 21, 22.
Фиксирующий узел 5 разделен на ведомую и ведущую части и имеет форму частей сферы с выступами для уплотнений 18 и 19 служащими также для возможности передачи усилия вращения от ведущего кулака 3 к ведомому кулаку 4. На каждой встречно расположенной части фиксирующего узла 5 имеется поверхность места уплотнения между фиксирующим узлом 5 и частью корпуса 9.
Сферические части фиксирующего узла 5 образованы от единого центра.
Принцип работы в качестве двигателя.
Рабочее тело, поступая во вход 10, распределяется сквозь отверстия в центральной части корпуса 9, в полости, ограниченной уплотнениями 12-22, и оказывает давление на стороны лопастей 6 и 7, обращенных к входу, поворачивая кулаки 3, 4 с валами 1, 2 по часовой стрелке. При последующем вращении полости с рабочим телом последовательно замыкаются и при дальнейшем вращении за счет разницы давлений по сторонам лопастей 6 и 7 последовательно соединяются с выходом 11, при этом на другую сторону лопастей 6 и 7 воздействует давление рабочего тела.
Во всех случаях взаимное положение осей валов 1 и 2 с расположением выступов частей фиксирующего узла 5 образует равномерное или неравномерное усилие вращения валов 1 и 2.
Один из валов допускается не использовать.
На Фиг. 10 представлена сферическая машина (разнесенная сборка) с соосным расположением валов и с фиксирующим узлом, состоящим из неподвижного основания и подвижных уплотнительных элементов.
Имеются два входа 10 и два выхода 11, которые при параллельном соединении обеспечивают постоянство возможного перемещения объемов рабочими полостями.
В части корпуса 9 имеются уплотнения кулаков в виде выемок 21.
Отличается от Фиг. 9 соосным расположением ведущего и ведомого валов 1 и 2, а также наличием двух входов 10 и выходов 11. Принцип работы аналогичен предыдущей машине.
На Фиг. 11 представлена сферическая машина (разнесенная сборка) с соосным расположением валов и с фиксирующим узлом, состоящим из двух неподвижных оснований и подвижных уплотнительных элементов, при этом между основаниями размещен шарнир, представляющий собой заявляемый узел зацепления валов и предназначенный для возможности передачи силы вращения между параллельными валами.
Остальное аналогично уже описанному. За исключением применения полусфер и полувалов. Шарнир (Фиг. 4) передает усилие вращения от лопастей 6, 7 к валам 1, 2.
На Фиг. 12 представлена сферическая машина (разнесенная сборка) с несоосным расположением валов, с внутренним зацеплением кулаков и лопастей, с фиксирующим узлом, выполненным в виде вала.
Вход 10 и выход 11 расположены таким образом, чтобы рабочая полость при возможности вращения валов 1, 2 кратковременно замыкалась при возможности взаимного касания сторон лопастей (или при максимальном приближении их к друг другу.
В этой конструкции образованы два дополнительных объема, расположенные в пазах 6.1 и 7.1 лопастей 6 и 7. Кулаки 3, 4 сопряжены с пазами 6.1 и 7.1 в лопастях 6, 7 с возможностью перемещения в пазах 6.1 и 7.1 лопастей 6, 7 с одной стороны до другой стороны по пазам рабочего тела, для отсутствия заклинивания и остановки кулаков 3, 4 в лопастях 6, 7. Т.е. кулаки 3, 4 имеют сопротивление движению в лопасти 6, 7 за счет перемещения рабочего тела, расположенного в пазах.
При отсутствии возможности перемыканы лопастей 6, 7 или их выступов и впадин (на чертеже не указаны) объем рабочего тела, заключенный между не полностью сомкнутыми лопастями 6, 7 и корпусом 9, может переместиться от выхода 11 ко входу 10.
Устройство работает только в пульсирующем режиме и может использоваться в медицине как аналог камеры бесклапанного сердца без деформации эритроцитов. Описание работы:
Лопасти 6 и 7 сторонами касаются друг друга, вход 10 и выход 11 закрыты местами уплотнения 16 и 17 между лопастями 6 и 7 с корпусом 9, между противоположными частями лопастей 6, 7 и корпусом 9 расположено рабочее тело.
При поворачивании ведущего вала 1 кулак 3, соединенный с ведущим валом 1, поворачивает лопасть 6, и через фиксирующий узел 5 поворачивается в корпусе 9 другая лопасть 7, поворачивая другой кулак 4 с ведомым валом 2.
При поворачивании лопастей 6, 7 рабочий объем, заключенный между ними и корпусом 9, соединяется с выходом 11 и выдавливается лопастями 6, 7, одновременно другие края лопастей 6, 7 размыкаются и втягивают через вход 10 рабочее тело. При среднем положении лопастей 6, 7 объемы рабочего тела, находящиеся в корпусе 9 и разделенные лопастями 6, 7, равны. При дальнейшей работе цикличность работы повторяется.
Фиксирующий узел 5 выполнен в виде вала с выступами по краям, служащими для герметизации и фиксации на круговой оси вращения 9.3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Узел зацепления валов для синхронной передачи усилия вращения между валами | 2018 |
|
RU2710849C1 |
| Орбитально-траковый движитель | 2022 |
|
RU2778578C1 |
| Окружная машина (варианты) | 2017 |
|
RU2651105C1 |
| ДВУХОСЕВАЯ МАШИНА (ВАРИАНТЫ) | 2016 |
|
RU2632810C2 |
| ПЕТЛЕВАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2414601C9 |
| Шарнир равных угловых скоростей | 2019 |
|
RU2704649C1 |
| ОБЪЕМНАЯ РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА (ДВА ВАРИАНТА) | 2016 |
|
RU2612230C1 |
| РЕДУКТОР ЗАБОЙНОГО ДВИГАТЕЛЯ | 2019 |
|
RU2723807C1 |
| ТРАНСМИССИЯ ВЕРТОЛЕТА | 2013 |
|
RU2559676C2 |
| ГИДРАВЛИКО-ИНЕРЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ, СИСТЕМА УПРАВЛЕНИЯ ИМ, КОРОБКА ПЕРЕМЕНЫ ПЕРЕДАЧ И СПОСОБ ПРЕОБРАЗОВАНИЯ ИМИ КРУТЯЩЕГО МОМЕНТА | 2003 |
|
RU2259282C2 |

Изобретение относится к области машиностроения и может быть использовано в приводах машин для передачи вращающих моментов в условиях, когда оси соединяемых валов расположены с угловым и линейным смещением, в том числе и с совпадением угловых скоростей ведущего и ведомого вала. Узел зацепления валов содержит ведущий (1) и ведомый (2) валы, кулаки (3, 4), соединенные с валами (1, 2), и фиксирующий узел (5). Узел также содержит ведомую лопасть (6) и ведущую лопасть (7), каждая из которых установлена на фиксирующем узле (5) и выполнена с возможностью качения относительного него. Каждый кулак (3, 4) сопряжен с соответствующей лопастью (6, 7) с возможностью его перемещения относительно лопасти (6, 7). Также заявлена сферическая машина на основе узла зацепления валов. Технический результатом заявляемого изобретения в части узла зацепления валов является увеличение угла поворота и нагрузочной способности, а также снижение шумности зацепления по сравнении с зубчатыми зацеплениями. 2 н. и 6 з.п. ф-лы, 12 ил.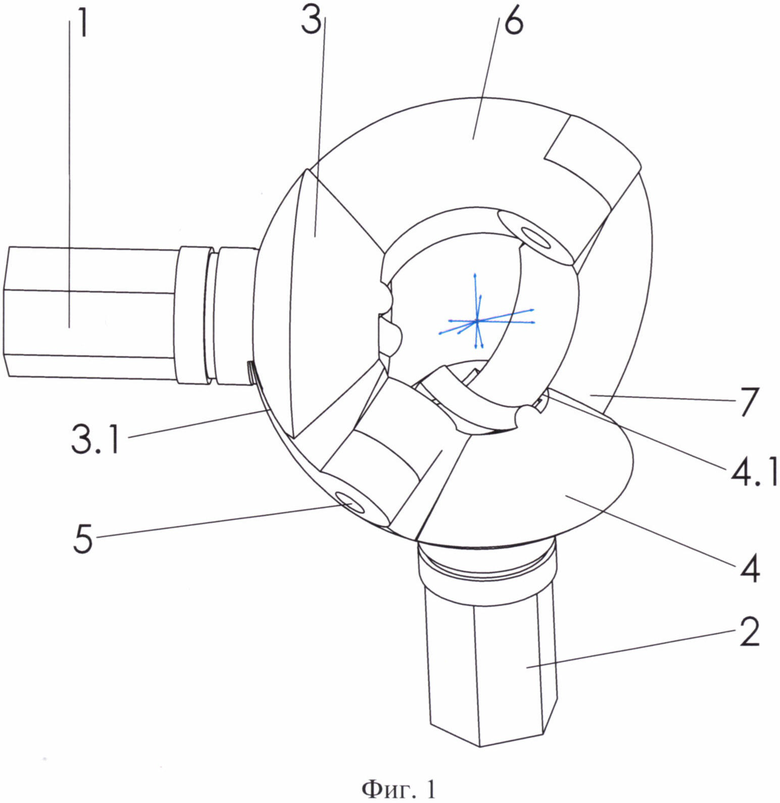
1. Узел зацепления валов, содержащий ведущий и ведомый валы, кулаки, соединенные с валами, и фиксирующий узел, отличающийся тем, что содержит две лопасти, каждая из которых установлена на фиксирующем узле и выполнена с возможностью качения относительного него, при этом каждый кулак сопряжен с соответствующей лопастью с возможностью его перемещения относительно лопасти.
2. Узел по п. 1, отличающийся тем, что фиксирующий узел выполнен в виде вала.
3. Узел по п. 1, отличающийся тем, что фиксирующий узел выполнен в виде диска.
4. Узел по п. 1, отличающийся тем, что фиксирующий узел выполнен в виде совокупности двух валов, разнесенных параллельно.
5. Узел по п. 1, отличающийся тем, что кулак имеет не менее чем один паз, а в лопасти выполнен не минее чем один выступ, образуя зацепление с возможностью движения лопасти внутри него.
6. Узел по п. 1, отличающийся тем, что кулак имеет не менее чем один выступ, а в лопасти выполнен не менее чем один паз, образуя зацепление с возможностью движения кулака внутри нее.
7. Узел по п. 1, отличающийся тем, что имеется по меньшей мере один корпус, в который помещены лопасти, фиксирующий узел и кулаки, при этом в корпусе выполнены отверстия для выхода из него валов.
8. Сферическая машина на основе узла зацепления валов по п. 1 содержит два вала, корпус, внутри которого расположены кулаки, соединенные с соответствующими валами, две лопасти и по меньшей мере один фиксирующий узел, причем в корпусе образовано по меньшей мере одно отверстие для прохода вала и по меньшей мере один вход, и по меньшей мере один выход, а лопасти установлены на фиксирующем узле с возможностью их качения относительно него, при этом с каждой лопастью сопряжен соответствующий кулак с возможностью его перемещения относительно лопасти, при этом в рабочих полостях между каждым кулаком и корпусом, каждым кулаком и каждой лопастью, каждой лопастью и корпусом, каждой лопастью и фиксирующим узлом, каждым кулаком и фиксирующим узлом, корпусом и фиксирующим узлом созданы места уплотнений.
| ШАРНИР РАВНЫХ УГЛОВЫХ СКОРОСТЕЙ | 2005 |
|
RU2289733C1 |
| Окружная машина (варианты) | 2017 |
|
RU2651105C1 |
| ШАРНИР КВАЗИСИНХРОННЫЙ КУЛАЧКОВЫЙ | 2012 |
|
RU2518429C2 |
| ПАНОРАМНЬШ МИКШЕР | 0 |
|
SU120168A1 |
| МАТРАЦ ДЛЯ БОЛЬНОГО | 1998 |
|
RU2154457C2 |

