Предлагаемое изобретение относится к транспортному машиностроению, в частности, к устройствам движителей транспортных средств по дорогам общего пользования и бугристым, скользким и вязким поверхностям, в том числе и по ступенькам лестниц, за счет возможности выбора способа перемещения и профилей зон зацепления.
Известны колесные, гусеничные, шаговые движители, которые предназначены для передачи усилия от двигателя к исполнительным элементам (колеса, гусеницы, шаговые механизмы, соответственно). Общим недостатком этих технических решений является ограниченная область применения, обусловленная возможностью контакта только с определенными видами поверхности.
Так проходимость колесного транспортного средства зависит от размера колес, их количества, размера пятна контакта, рисунка протектора, и дорожного просвета. Таким образом, для возможности изменения проходимости, в том числе и для возможности движения по дорогам общего пользования в колесных транспортных средствах требуется иметь запасной комплект колес с другим рисунком протектора, и подвеску колес с возможностью изменения дорожного просвета.
Проходимость гусеничного транспортного средства зависит от дорожного просвета. Для возможности движения гусеничное транспортное средство имеет возможность перемещения относительно траков, имеющих контакт с поверхностью. При этом значительная часть энергии для движения транспортного средства тратится для возможности передачи усилия вращения от валов приводных колес для возможности перемещения гусениц по поверхности. Проходимость гусеничного транспортного средства ограничена перепадом высот поверхности в площади гусениц и вязкостью поверхности.
Шаговые движители имеют сложную конструкцию и низкую надежность.
Известен колесно-лопаточный движитель [RU 2293040, опубл. 10.02.2007 г., RU 2329180, опубл. 20.07.2008 г.], в котором колеса соединены колен валом, а лопатки (траки) расположены на полуосях между колесами, при этом на нижних кромках лопаток могут быть установлены лопасти. Вторая ось колен вала не является управляемой, что исключает использование для возможности движения всех поверхностей траков, а также ограничивает область применения и исключает динамическое регулирование проходимости транспортного средства.
Известен шагающий движитель [RU 2513348, опубл. 20.04.2014], в состав которого входят муфты с коленчатой неподвижной осью, что ограничивает область применения и исключает динамическое регулирование проходимости транспортного средства.
Наиболее близок, по технической сущности к заявляемому изобретению, привод вертолетных винтов описанный в изобретении US 2 443 393 от 15.06.1948 г., в котором привод каждого трехлопастного винта состоял из 12 упругих тяг, на концах которых расположены оси, закрепленные с возможностью вращения на двух дисках, при этом усилие возможного вращения посредством тяг передается от одного диска к другому.
Недостатком известного технического решения является низкая функциональность, т.к. позволяет только разнести в пространстве два вертолетных винта. Кроме того, используемые в его конструкции упругие тяги позволяют только передавать усилие вращения от двигателя к винтам.
Техническим результатом заявляемого изобретения является расширение области применения за счет возможность перемещаться по любым поверхностям (грязь, песок, твердая, ледяная, снежная, гористая и др.), а также в жидкости.
Указанный технический результат достигается за счет того, что орбитально-траковый движитель содержит
расположенные на одной оси два вала, по меньшей мере один из которых выполнен приводным,
на одном из валов установлен первый исполнительный элемент,
на другом валу установлен рычаг, который соединен с по меньшей мере одним вторым исполнительным элементом, ось которого расположена параллельно оси первого исполнительного элемента,
при этом на втором исполнительном элементе закреплены шарниры, на которых установлены траки, соединенные с первым исполнительным элементом, причем расстояние между осями крепления траков к первому и второму исполнительному элементам равно расстоянию между осями двух исполнительных элементов.
Таким образом, за счет совокупности существенных признаков удалось получить движитель, способный перемещаться по перечисленным выше типам поверхностей за счет совмещения свойств колеса и трака, имеющее возможность в движении изменять профили и площадь зацепления с поверхностью, цепляется за неровности поверхности, и менять дорожный просвет, с возможностью гребли в жидкой и вязкой среде, и с возможностью подстройки под размер ступенек. По сути, организовано орбитальное вращение относительно валов поверхностей траков вместе с исполнительными элементами.
Под исполнительным элементом понимается средство для взаимодействия с поверхностью или средой, в которой происходит движение.
Появляется также возможность динамического регулирования рельефа зацепления и высоты дорожного просвета, предназначенного для движения транспортного средства в жидких, вязких средах и по твердым поверхностям с препятствиями, в том числе и по дорогам общего пользования, и на лестничных маршах при конструктивной и технологической простоте устройства.
В зависимости от препятствий с помощью поворота или/и вращения одного или двух приводных валов возможно при движении транспортного средства выбирать оптимальный рельеф зацепления движителя с поверхностью, его площадь и дорожный просвет:
- при движении по дорогам с ровной и твердой поверхностью при минимальном дорожном просвете оптимальным рельефом движителя будет пятно протектора на дороге от контакта качения колеса;
- при движении по лестничным маршам зацепление рельефа движителя образуется за счет вращения орбитальных колес при качении колес и шагом траков по ступенькам;
- для преодоления препятствий требуется вращение орбитальных колес и траков, рельеф концов которых обеспечивает зацепление с препятствием, а дорожный просвет при этом изменяется от минимального до максимального;
- для движения по болотистой или покрытой снегом поверхности качение и орбитальных колес происходит при поддержке шагающих траков, рельеф которых расположен параллельно или под углом к поверхности, с высотой дорожного просвета зависящем от расположения рельефа на поверхности траков;
- для движения по скользкой или каменистой поверхности используется шагание траками рельефом с заостренным профилем, расположенными под углом к поверхности, при этом дорожный просвет близок к максимальному;
- для движения в жидкой или вязкой среде используется гребля длинным профилем траков, расположенных перпендикулярно или под углом к поверхности, при касании с мелью траки шагают, опираясь на другую часть профиля;
- для движения при преодолении вертикальных препятствий используется зацепление, описанное в двух предыдущих пунктах, или заостренным профилем в концах траков, имеющих только один шарнир соединенный через колесо торсионом с другим траком.
Проходимость предлагаемого устройства возможно изменять за счет изменения форм исполнительного элемента, пятна его контакта, дорожного просвета, способа движения (качения или/и шага или/и гребли).
Заявляемое изобретение поясняется фигурами и нижеследующим описанием.
На Фиг. 1-4 представлены варианты исполнения заявляемого движителя.
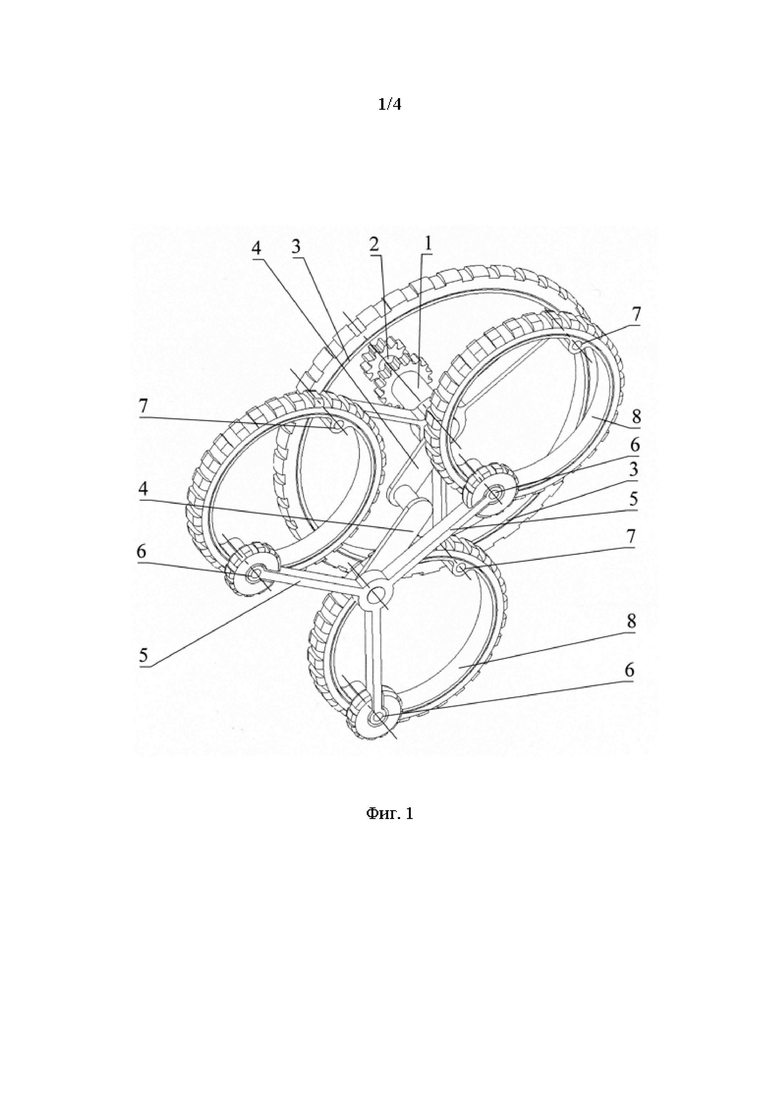
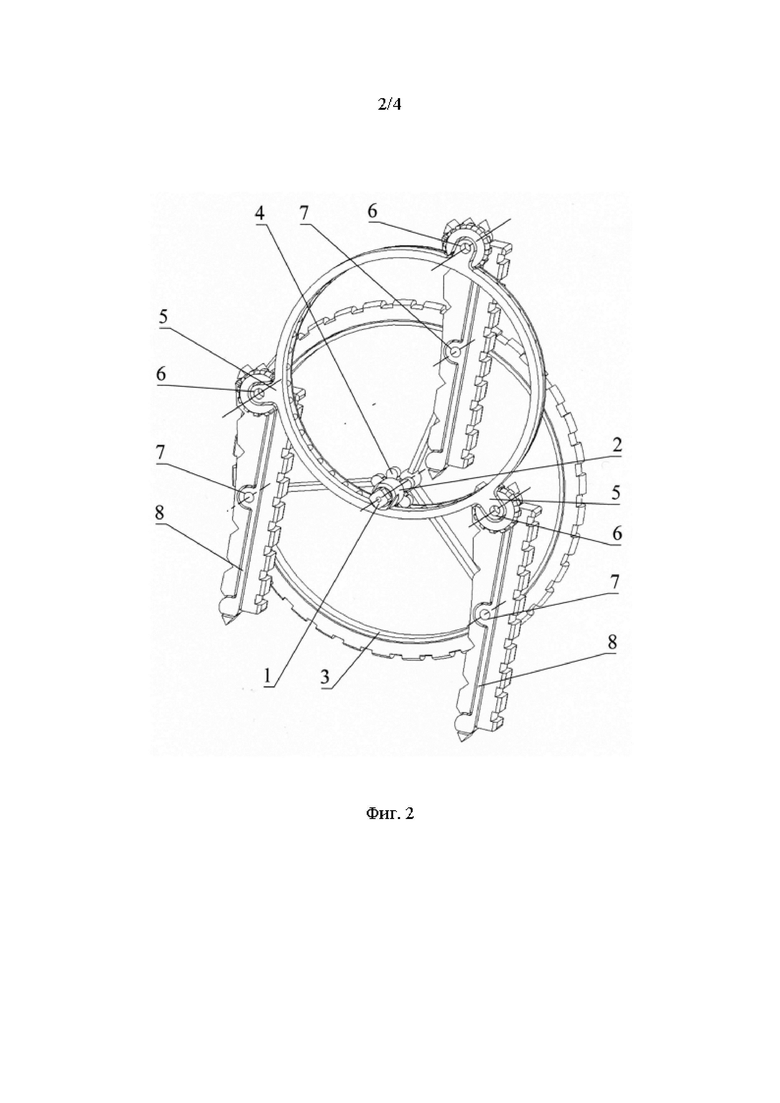
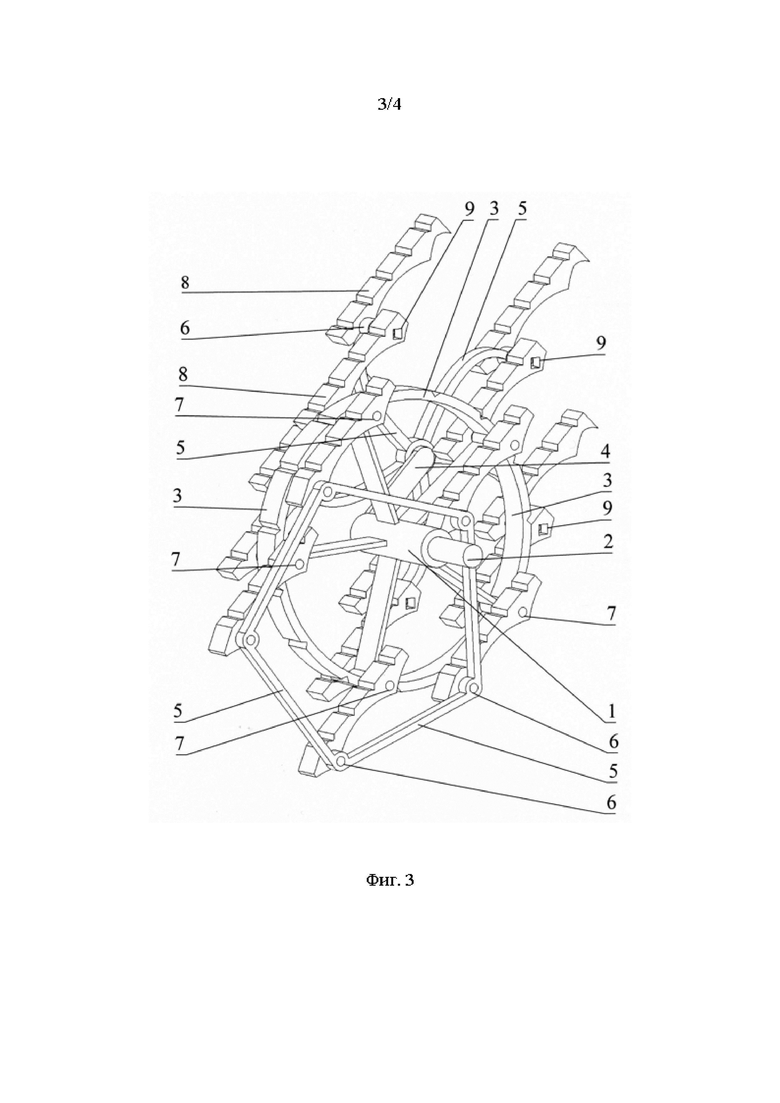
Орбитально-траковый движитель (Фиг. 1-4) содержит расположенные на одной оси два вала 1 и 2, по меньшей мере один из которых выполнен приводным.
На валу 1 установлен первый исполнительный элемент 3. На валу 2 установлен рычаг 4, который соединен с по меньшей мере одним вторым исполнительным элементом 5, ось которого расположена параллельно оси первого исполнительного элемента 3. При этом исполнительный элемент 5 может быть расположен с одной и/или другой стороны исполнительного элемента 3 по оси.
При этом на втором исполнительном элементе 5 закреплены шарниры 6, на которых установлены траки 8, соединенные с первым исполнительным элементом 3 через шарниры 7.
Причем расстояние между осями крепления траков 8 к исполнительному элементу 3 и исполнительному элементу 5 равно расстоянию между осями этих двух исполнительных элементов 3, 5.
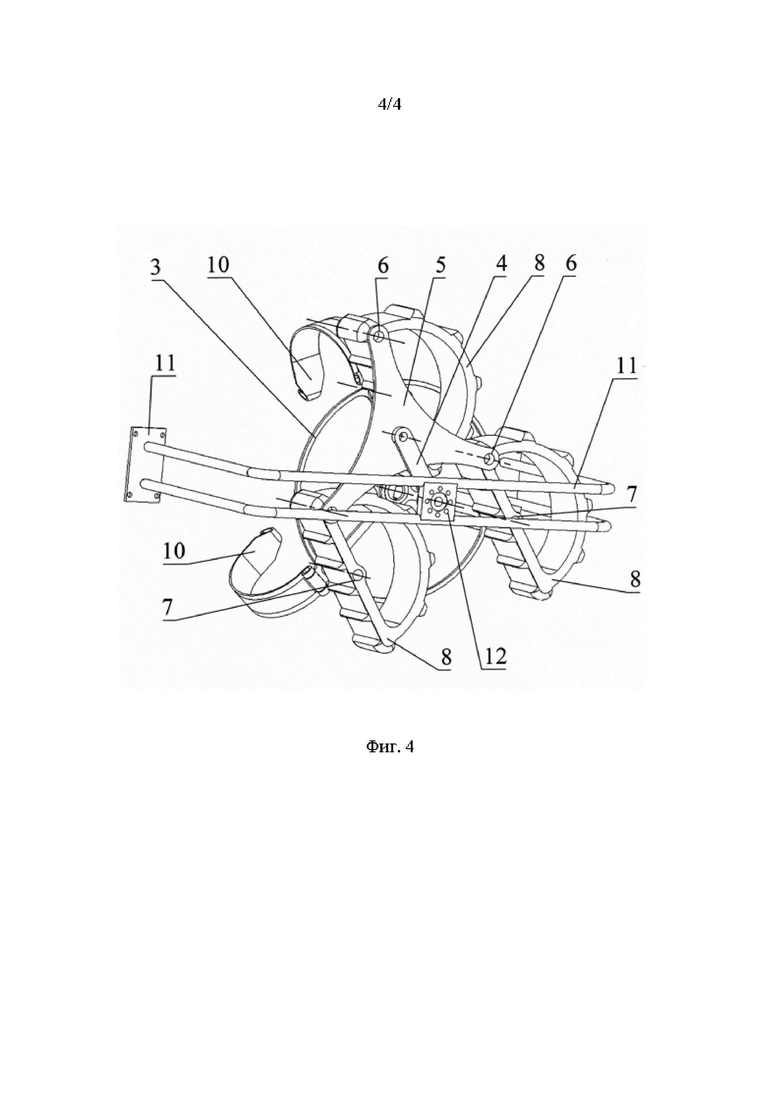
Валы 1, 2 могут быть расположены коаксиально (Фиг. 1-3) или со смещением по одной и той же оси (Фиг. 4). На Фиг.4 валы 1 и 2 не показаны, но условно обозначено место их установки как отверстия с осью.
В случае, когда движение осуществляется по дорогам общего пользования, чаще всего применяется только один приводной вал, а при движении по сложной поверхности применяют два приводных вала для обеспечения зацепления исполнительных элементов с поверхностью. В случае застревания за счет включения второго приводного вала обеспечивается орбитальное вращение второго исполнительного элемента, что позволяет справиться с препятствием.
На Фиг. 1 исполнительный элемент 3 представляет собой колесо, в ободе которого образованы места крепления шарниров 7 с траками 8, а исполнительный элемент 5 представляет собой деталь с по меньшей мере тремя спицами, на концах которых расположены шарниры 6 для установки на них траков 8.
На Фиг. 2 исполнительный элемент 3 представляет собой колесо, в ободе которого образованы места крепления шарниров 7 с траками 8, а исполнительный элемент 5 представляет собой цевочного колесо, в выступах (не менее 3х) которого расположены шарниры 6 для установки на них траков 8.
На Фиг. 3 исполнительный элемент 3 представляет собой колесо, в ободе которого образованы места крепления шарниров 7 с траками 8. Имеются два исполнительных элемента 5, расположенных с обеих сторон исполнительного элемента 3 и представляющих собой кольцо в форме пятиугольника и много плечевой рычаг с дугообразными спицами (не менее 3х), соответственно. Траки 8 последовательно (друг за другом или/и навстречу) соединены друг с другом, но на параллельных осях. Траки 8 соединены торсионами 9 через шарнир 6 исполнительного элемента 5.
На Фиг. 4 исполнительный элемент 3 представляет собой колесо, в ободе которого образованы места крепления шарниров 7 с траками 8. Этот исполнительный элемент 3 выполнен с возможностью фиксации на колесе транспортного средства с помощью фиксаторов 10. Имеется исполнительный элемент 5, представляющий собой деталь (рычаг) с по меньшей мере тремя спицами, на концах которых расположены шарниры 6 для установки на них траков 8. Для фиксации соосности валов 1 и 2 на корпусе транспортного средства установлен кронштейн 11. Регулировка рычага 4 осуществляется вручную путем его поворота и установки стопоров в отверстия 12.
Рычаг 4 может представлять собой промежуточное звено для передачи момента вращения от вала 2 к исполнительному элементу 5, а также для фиксации заданного положения исполнительного элемента 5. В качестве рычага 4 может применяться зубчатый, цевочный, цепной, ременный механизм или жесткая передача с прямым или ступенчатым исполнением.
Шарниры 6, 7 закреплены на исполнительных элементах 3, 5 или/и на траках 8.
Примеры.
1. В случае применения движителя для перемещения с колесными шинами за счет орбитального вращения исключается контакт траков 8 с поверхностью.
2. В случае применения движителя для шагового или гусеничного перемещения каждый трак 8 своей рабочей поверхностью последовательно упирается на поверхность и за счет орбитального движения перемещается по ней, освобождая место для следующего за ним трака 8.
3. В случае применения движителя для перемещения в жидкостях (например, в водной среде) траки 8 образуют собой лопасти, который при орбитальном движении вертикально или под углом погружаются в жидкость и своей рабочей поверхностью проталкивают жидкость и также вертикально или под углом поднимаются из жидкости.
Таким образом, отличием заявленного изобретения от известных решений является:
- рабочие поверхности расположены по всему периметру траков или/и на периметре колес или/и на выступах трехплечевых или/и с большим количеством выступов рычагов (звездочек) или/и на поверхности колец, или/и на их выступах;
- возможность динамического регулирования дорожного просвета и профилей зацепления;
- возможность применения двух ведущих валов, расположенных на одной оси;
- возможность последовательного соединения траков для уменьшения удельного давления на поверхность по которой движется транспортное средство;
- возможность регулирования дорожного просвета и профилей зацепления, а также возможность установки на используемые транспортные средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕХОДА ТРАНСПОРТНЫХ СРЕДСТВ С КОЛЕСНОГО ХОДА НА КОЛЕСНО-СЦЕПНОЙ И ОБРАТНО И УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖИТЕЛЕЙ | 2012 |
|
RU2500566C2 |
| СЪЕМНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2308396C1 |
| Движитель повышенной проходимости на пневмогусенице на воздушной подушке | 2016 |
|
RU2675725C2 |
| ДВИЖИТЕЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2022 |
|
RU2790731C1 |
| Колесно-гусеничный движитель | 1984 |
|
SU1162665A1 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2038218C1 |
| РОЛИКОВОЕ СРЕДСТВО ПЕРЕДВИЖЕНИЯ | 2019 |
|
RU2745724C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| УЗЕЛ ПОДВЕСКИ ОПОРНОГО КОЛЕСА В ТРАНСПОРТНОМ СРЕДСТВЕ | 2011 |
|
RU2505423C2 |
| КОЛЕСО ПОВЫШЕННОЙ ПРОХОДИМОСТИ (ВАРИАНТЫ) | 2001 |
|
RU2207249C1 |
Изобретение относится к устройствам движителей транспортных средств. Орбитально-траковый движитель содержит расположенные на одной оси два вала, один из которых выполнен приводным. На одном из валов установлен первый исполнительный элемент, на другом валу установлен рычаг, который соединен со вторым исполнительным элементом, ось которого расположена параллельно оси первого исполнительного элемента. На втором исполнительном элементе закреплены шарниры, на которых установлены траки, соединенные с первым исполнительным элементом. Расстояние между осями крепления траков к первому и второму исполнительному элементам равно расстоянию между осями двух исполнительных элементов. Достигается расширение области применения движителя для перемещения по дорогам общего пользования и бугристым, скользким и вязким поверхностям, в том числе и по ступенькам лестниц, за счет возможности выбора способа перемещения и профилей зон зацепления. 4 ил.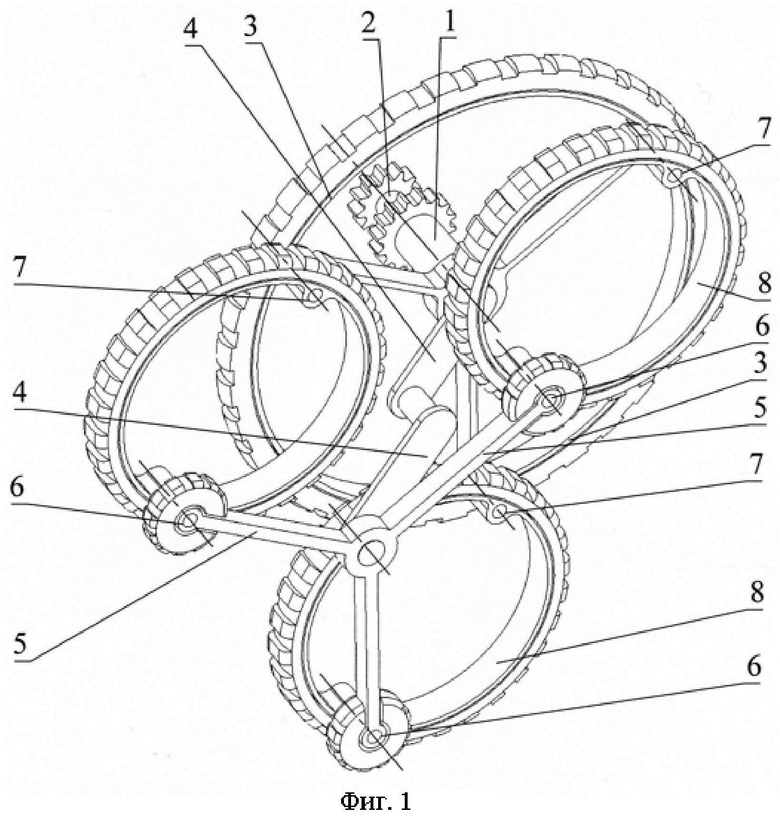
Орбитально-траковый движитель содержит расположенные на одной оси два вала, по меньшей мере один из которых выполнен приводным, на одном из валов установлен первый исполнительный элемент, на другом валу установлен рычаг, который соединен с по меньшей мере одним вторым исполнительным элементом, ось которого расположена параллельно оси первого исполнительного элемента, при этом на втором исполнительном элементе закреплены шарниры, на которых установлены траки, соединенные с первым исполнительным элементом, причем расстояние между осями крепления траков к первому и второму исполнительноым элементам равно расстоянию между осями двух исполнительных элементов.
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 2013 |
|
RU2513348C1 |
| Транспортное средство, в котором допускается возможность перевода движителя из дорожной конфигурации во внедорожную и наоборот | 2018 |
|
RU2734175C2 |
| Движитель транспортного средства Анопченко В.Г. | 1983 |
|
SU1117246A1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2265526C2 |
| СПОСОБ ПРОВЕДЕНИЯ БРОНХОАЛЬВЕОЛЯРНОГО ЛАВАЖА ПАЦИЕНТАМ С МАССИВНОЙ ОБСТРУКЦИЕЙ БРОНХИАЛЬНЫМ СЕКРЕТОМ | 2011 |
|
RU2443393C1 |

