Изобретение относится к крепи лавы подземной горной выработки согласно ограничительной части п. 1 формулы изобретения. Эта крепь лавы известна из DE 102009048154 А1. При этом на верхняке каждой из крепежных опор (щита) вместо ультразвукового передатчика установлена камера. Она служит в качестве датчика, который измеряет расстояние между конвейером и крепежной опорой для управления шагающими цилиндрами. С помощью системы управления лавой, которая обычно имеет центральный компьютер, может определяться и контролироваться положение отдельных звеньев конвейера, а также положение щитов, как и положение и ориентация всей крепи лавы. Для этого результаты измерений отдельных камер передаются по линиям передачи данных на систему управления лавой, которая, в свою очередь, инициирует управление отдельных гидравлических цилиндров каждой крепежной опоры. То есть камеры служат лишь в качестве датчиков.
Из DE 102008029406 известна камера, которая размещена внутри корпуса и через средства передачи данных может передавать записанные камерой визуальные данные на внешнее устройство обработки данных и в обратном направлении данные по управлению от внешнего устройства обработки данных на камеру, причем средства передачи данных содержат, по меньшей мере, световод, который является подсоединяемым к внешнему устройству обработки данных.
Кроме того, предлагается бескабельная передача / радиопередача от камеры к внешнему устройству обработки данных с беспроводной WLAN-связью (WLAN = беспроводная локальная сеть). Предложенная при этом камера для практической эксплуатации является слишком тяжелой, распознавание изображений в отдельных местах подземной выработки может быть полезным, передача данных наряду с общепринятой передачей данных между находящимся в штреке или на поверхности земной поверхности пунктом управления и отдельными щитами кажется странным дополнением.
Задача изобретения состоит в том, чтобы предложить подходящую для подземной выработки искробезопасную конфигурацию камеры, специфическое пригодное во всех местах лавы выполнение камеры, сеть передачи данных, которая не только подходит для того, чтобы соответствующим образом подключить камеры к пунктам управления (штрековая стация, устройство управления лавой) и к приборам управления щитами, но и также рационально включается в подземную систему передачи данных через проводящую шину.
Решение по п. 1 формулы изобретения отличается тем,
- что камеры в своем корпусе и в лаве для максимально полного охвата длины и перечного сечения прохода расположены перед некоторым числом крепежных опор,
- что искробезопасность получается уже за счет искробезопасной электроники камер, так что корпус камеры может быть простым корпусом из листовой стали,
- что благодаря WLAN-антенне каждого корпуса камеры является достижимой локальная сеть камер (беспроводная локальная сеть), которая избыточным или альтернативным образом может брать на себя функции образованной проводящей шиной между устройством управления лавой и приборами управления щитами сети, и наоборот,
- что камеры и корпуса камер встроены в сеть камер последовательно и таким образом, что сеть камер может быть создана частично с помощью кабелей и частично беспроводным способом. За счет этого могут быть сокращены расходы на аппаратные средства для сети камер,
- что сеть камер за счет особенностей электроники каждого корпуса камеры является особо быстрой и намного быстрее, чем сеть передачи данных посредством проводящей шины.
Для увеличения передаваемого количества данных служит усовершенствование по п. 2 формулы изобретения.
Усовершенствование по п. 3 формулы изобретения учитывает непредсказуемости радиосвязи и, прежде всего, WLAN-связи под землей, за счет того, что в некоторых областях также предусматривается передача данных по кабелю.
За счет размещения нескольких блоков питания для энергоснабжения корпусов камер (п. 4 формулы изобретения) последствия отказа сводятся к минимуму. П. 5 формулы изобретения с усовершенствованием по п. 6 формулы изобретения обеспечивают однозначный и безошибочный обмен данными устройства управления лавой с соответственно вовлеченным в процесс управления корпусом камеры и их камерами.
Изобретение в усовершенствовании по п. 7 позволяет осуществлять интеграцию системы камер в организацию крепежных работ, которая происходит из находящегося в штреке или на земной поверхности пункта управления. За счет того, что оператор получает снятые камерами изображения лавы именно из области, в которой в данный момент находится выемочная машина, он получает необходимую информацию для выдачи необходимых управляющих сигналов и, прежде всего, аварийных сигналов. Для этой информации или управляющих сигналов до сих пор на месте должен быть персонал, отвечающий за то, чтобы исключать опасности для материала и/или людей. П. 8 формулы изобретения предусматривает, что именно аварийные ситуации согласно изобретению можно учитывать посредством того, что по сети камер является возможной избыточная или альтернативная, но в любом случае особо быстрая передача данных. В усовершенствовании по п. 9 происходит дополнение и благоприятное усовершенствование предложенного в документе DE 10018481 В4 устройства для передачи данных породы от выемочной машины по радио на несколько установленных вдоль очистного забоя на взаимном расстоянии радиоприемников. При этом только самый сильный или же самый полный в цифровом отношении из радиосигналов передается дальше центральному датчику команд для выработки командных сигналов для очистной выемки. За счет усовершенствования предусматривается дальнейшее включение сети камер в передачу данных возведения крепи, которая из-за скорости передачи данных в сети камер является особо целесообразной. Собранные на выемочной машине данные о рабочем состоянии и о состоянии выемки имеют лишь значение в данный момент и поэтому должны для оценки и учета в очистном забое передаваться особо быстро.
Цель изобретения заключается в том, чтобы за счет системы камер добиться дальнейшей автоматизации очистного забоя и возведения крепи. Первым шагом по п. 10 является автоматизированное определение опасности, благодаря которому предотвращаются ошибки в обслуживании, и посредством предупредительных сигналов или автоматически становится возможным быстрое вмешательство в рабочий процесс.
В одном усовершенствовании этого аспекта изобретения по п. 11 и 12 группы камер согласно изобретению используются для съемки фактического изображения поперечного сечения проезда. За счет этого при малой трудоемкости измерения обеспечивается наивысшая безопасность и надежность для прохода выемочной машины вдоль лавы вплоть до безлюдной эксплуатации. Как это требуется для безопасной эксплуатации, происходит измерение и оценка поперечного сечения лавы перед каждой крепежной опорой, но измерительная сенсорная техника ограничена камерами и корпусами камер, которые установлены только на расстоянии от некоторых крепежных опор.
В этом усовершенствовании в памяти устройства управления лавой задается и сохраняется модель поперечного сечения проезда, которая делает возможным проход выемочной машины, например в качестве модели проезда или контура, для поперечного сечения лавы перед каждой из крепежных опор. Эта модель сохраняется в памяти, либо как поверхность с соответствующими угловыми точками, либо с положением в основу характеристических элементов имеющегося в распоряжении поперечного сечения проезда. Для определения фактического поперечного сечения применяются камеры, которые с известным уменьшением (фактор масштабирования) снимают фактическое изображение фактически имеющегося перпендикулярно направлению движения фактического поперечного сечения проезда перед каждой крепежной опорой вдоль их области освещения. Эти фактические изображения передаются на управляющее устройство и в нем обрабатываются посредством соответствующего программирования в смысле разрешения движения.
При предусмотренном согласно изобретению сравнении фактических визуальных данных и заданных визуальных учитывается, что из совпадения можно исходить только в том случае, если измерительные положения и реперные точки назначенных размеров в модели и в реальности совпадают геометрически. Измерительные положения - это положения, в которых установлены датчики. Эти положения при определении модели и назначении размеров фактического состояния должны быть идентичными.
Реперные точки назначения размеров - это, например, две точки изображения, для которых должны быть назначены размеры относительно их расстояния, относительно наклона их соединительной линии, относительно длины ограниченной ими прямой.
В варианте, который применяет камеры для измерения и оценки поперечного сечения лавы перед каждой крепежной опорой (п. 11 формулы изобретения), происходит простое сравнение площади. Для этого модель проезда может быть сохранена в памяти лишь образно, без необходимости ее сохранения посредством отдельных измеренных величин. Управляющее устройство приспосабливает сохраненное заданное изображение, то есть модель проезда / модель контура в снятое камерами изображение поперечного сечения (фактическое изображение) в предварительно определенных точках сравнения, так что сравнимые элементы и точки изображения и модели проезда / модели контура лежат друг на друге, если оба (обе) идентичны. Для разрешения проезда важным является то, чтобы изображение без избытка входило в модель контура, однако относительно измерительной сенсорной техники ограничено крепежными опорами с камерами и корпусами камер.
В другом варианте, который использует камеры для измерения и оценки поперечного сечения лавы перед каждой крепежной опорой (п. 12 формулы изобретения), происходит анализ изображения снятого фактического изображения для определения параметров, которые также лежат в основе модели проезда / модели контура и сохранены в памяти управляющего устройства. Для этого в фактическом изображении считываются фактические величины (наклон, расстояние, длина) выбранных параметров и в реперных точках, которые имеются в модели проезда / модели контура и фактическом изображении и обозначают идентичные элементы поперечного сечения проезда, подогнанные в модель проезда / модель контура. В зависимости от того, подходит ли наклон соединительной линии или же измерительное положение и соответствующая фактическая величина в модель проезда / модель контура, происходит обрабатываемый в смысле разрешения движения сигнал на систему управления выемочной машины.
В осуществлении изобретения по п. 13 формулы изобретения, уменьшается трудоемкость измерения, но одновременно повышается содержание реальности сохраненной модели проезда / модели контура. Становится возможным привлекать сохраненные конструктивные данные, которые являются постоянными, и при сравнении заданного с фактическим.
Цель изобретения, уменьшить трудоемкость измерения в лаве, но одновременно обеспечить наивысшую безопасность и безотказность, может быть достигнута только путем осознания того, что имеются возмущающие воздействия, которые путем съемки и геометрического измерения не могут быть зарегистрированы или могут быть зарегистрированы лишь с большой трудоемкостью или не могут быть зарегистрированы надежно. Поэтому изобретение в п. 14 формулы изобретения предусматривает регистрацию таких возмущающих воздействий, в этой заявке обозначенных условными величинами. Усовершенствование по п. 15 формулы изобретения служит надежности распознания и анализа изображений. Прежде всего, таким образом маркируются и четко распознаются характеристические элементы, точки измерения и реперные точки.
Но, одновременно, тем самым в качестве благоприятного побочного эффекта может обеспечиваться, становиться более благоприятным и более надежным распознание лиц посредством камер (п. 16 формулы изобретения).
В остальном, изобретение исходит из того, что распознание лиц может быть только побочным эффектом системы камер по этому изобретению, так как надежность системы управления требует уменьшения трудоемкости измерений, в то время как при распознании лиц избыточность и «слишком много» не мешает, а скорее повышает надежность высказывания. Отсюда усовершенствование по п. 17 формулы изобретения.
По п. 18 формулы изобретения для улучшения распознания изображений, прежде всего, в случае с применением особых маркировочных точек, маркировочных полос, маркировочных цветов, также применяется инфракрасный свет, предпочтительно путем включения в обычное высвечивание белым светом.
В дальнейшем, пример осуществления описывается на основе чертежа.
Показано на:
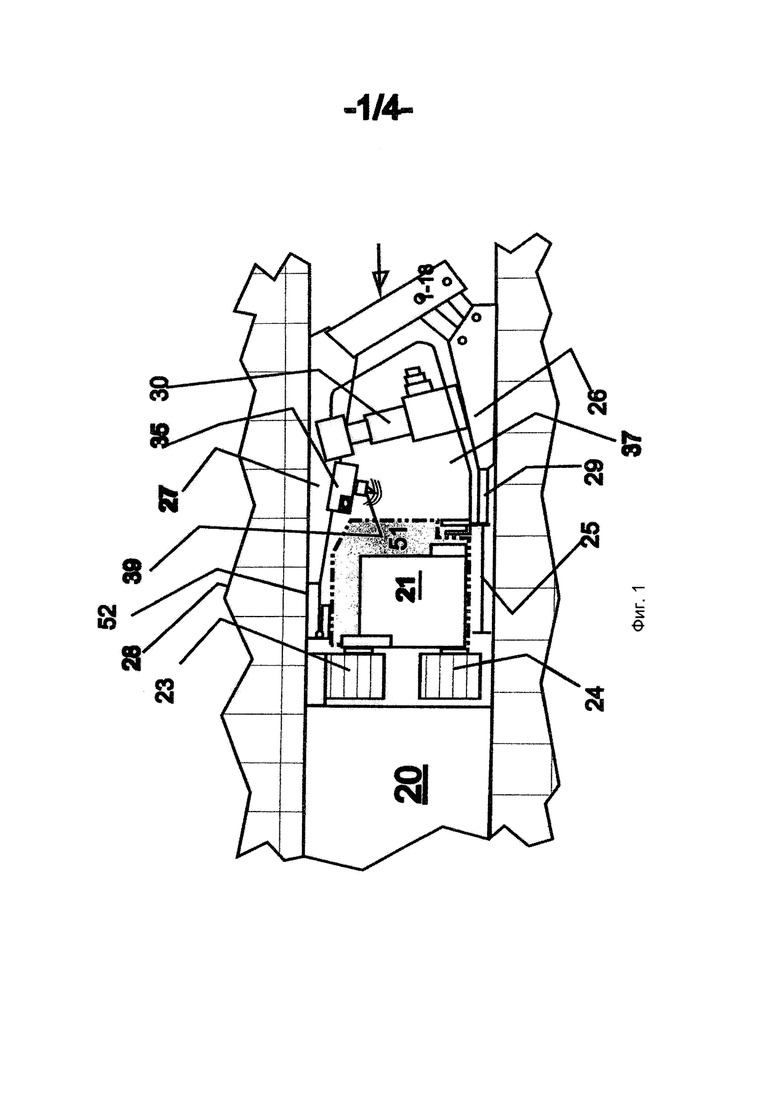
Фиг. 1: разрез через лаву с крепежным щитом,
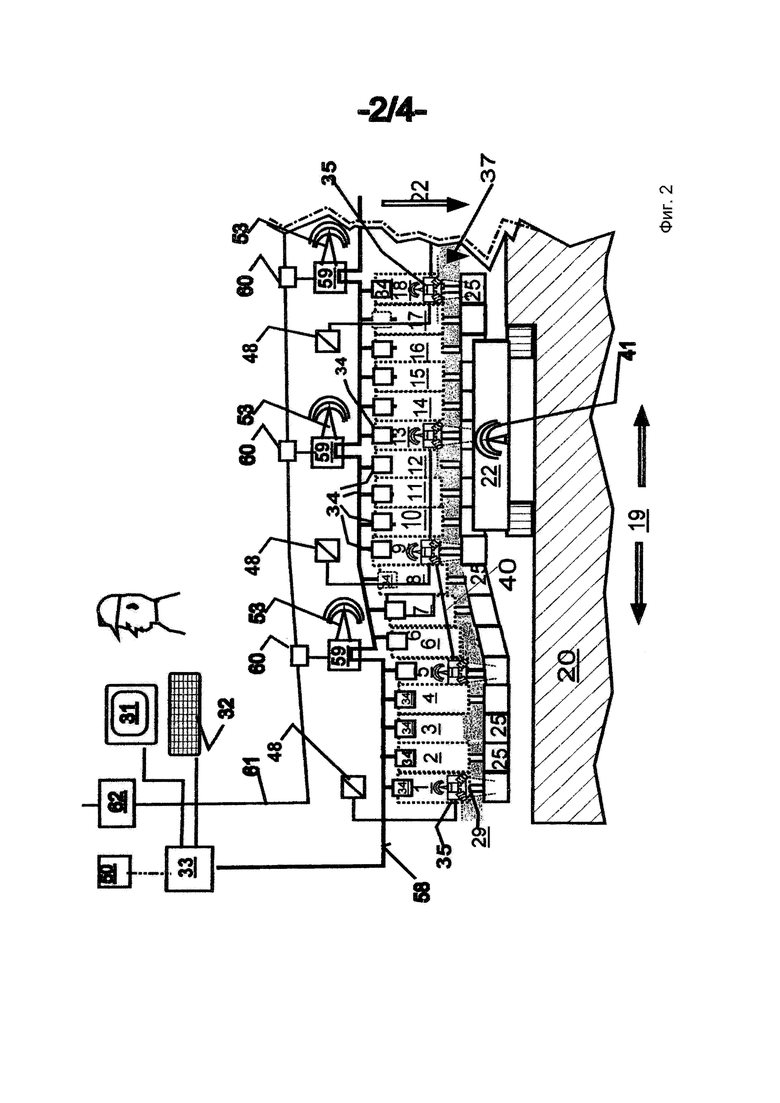
Фиг. 2: схематический вид сверху на врубовую машину и группу крепежных щитов,
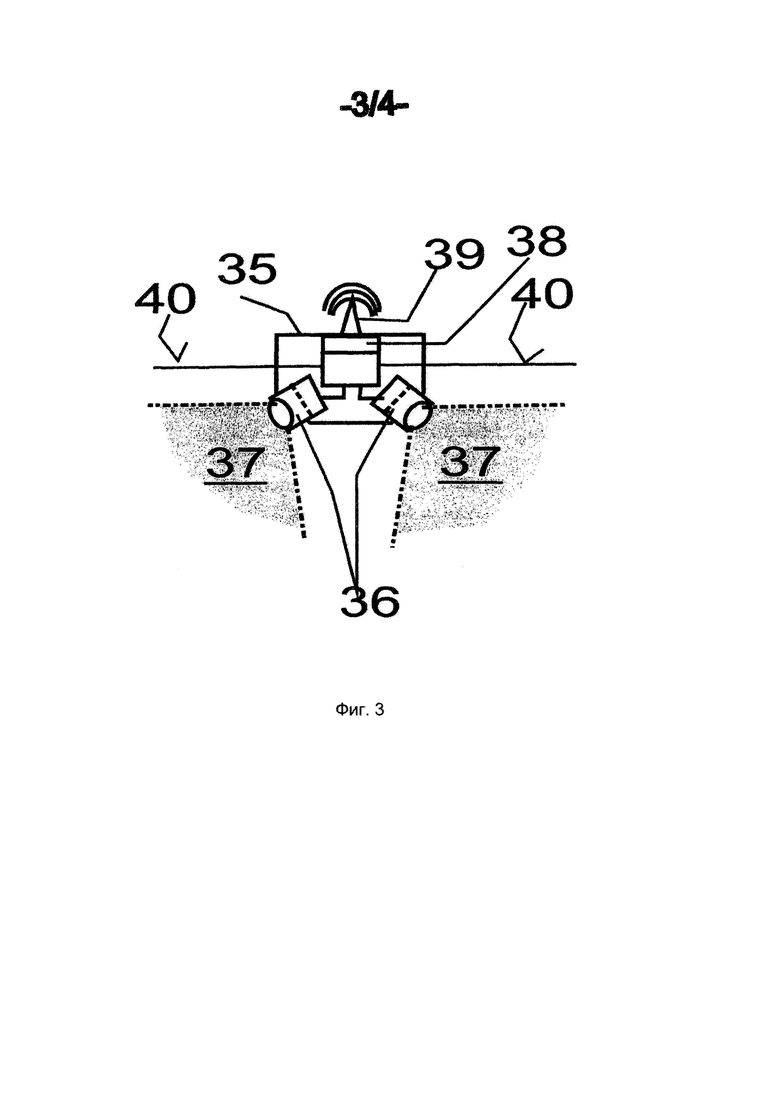
Фиг. 3: схематическое представление корпуса камеры,
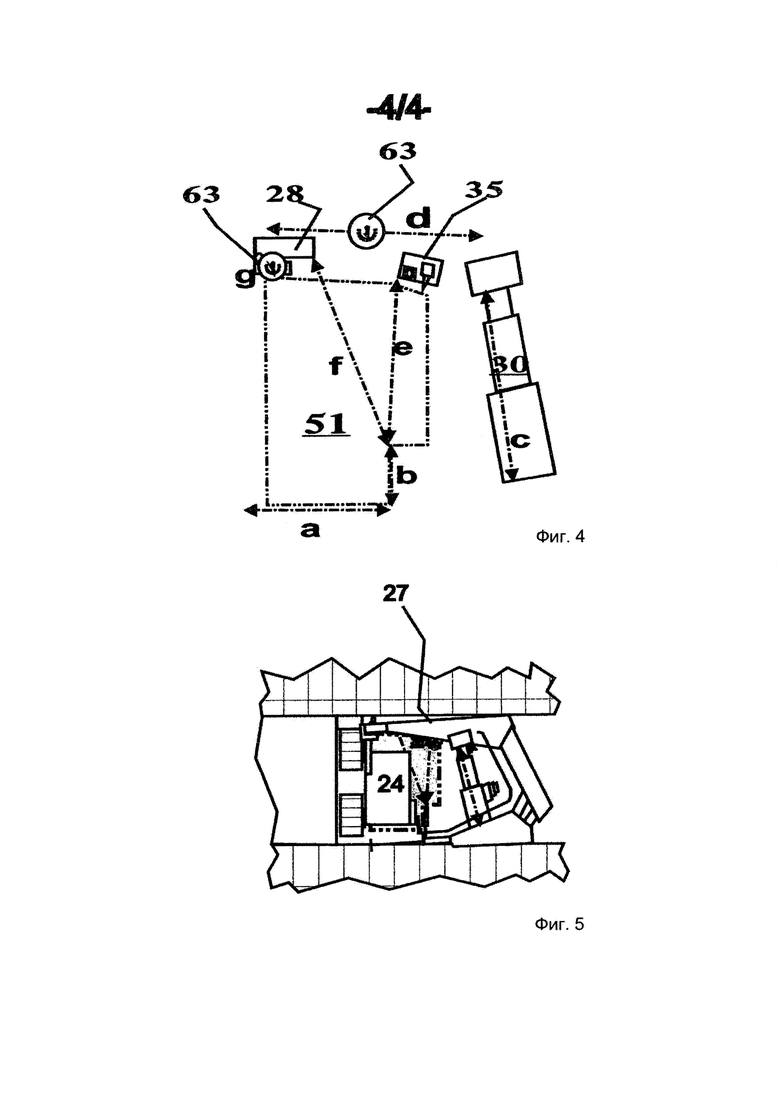
Фиг. 4: модель проезда в качестве модели контура,
Фиг. 5: разрез согласно фиг. 1, но с опущенным крепежным щитом.
На фиг. 1 в качестве выемочной машины 21 показана фрезерная машина и одна из крепежных опоры 1-18. Крепежные опоры, вообще и в этой заявке, также называются крепежным щитом или щитом. На фиг. 2 показано несколько крепежных опор 1-18. Крепежные опоры расположены вдоль пласта 20. Пласт 20 вырабатывается режущим устройством 23, 24 добывающей машины 21, например врубовой машины 21, в направлении 22 выемки. Врубовая машина 21 является перемещаемой с помощью врубового троса, который не показан, в направлении 19 реза вдоль угольного фронта. Раздробленный уголь нагружается на конвейер врубовой машиной, также называемой «вальцовым погрузчиком». Конвейер состоит из желоба 25, в котором панцирный конвейер перемещается вдоль угольного фронта. Желоб 25 подразделен на отдельные единицы, которые, хотя и соединены друг с другом, но могут совершать движение относительно друг друга в направлении 22 выемки. Каждая из единиц посредством цилиндропоршневого блока (шагающий поршень) 29 в качестве датчика силы соединена с одной из крепежных секций 1-18.
Каждая из крепежных опор служит для того, чтобы подпирать лаву кверху. Для этого служат дополнительные цилиндропоршневые блоки, например 30, которые закрепляют нижнюю плиту 26 относительно кровельной плиты 27. Кровельная плита на своем переднем, обращенном к пласту конце имеет так называемый противоотжимной щиток 28.
При этом речь идет о щитке, который является откидываемым к отбиваемой угольной стене. Противоотжимной щиток 28 перед подъезжающей врубовой машиной 21 должен подниматься. И для этого тоже служит не показанный еще один цилиндропоршневой блок.
Противоотжимной щиток 28 может быть установлен с возможностью поворота на подвижном колпаке 52. Подвижный колпак является втягиваемой и выдвигаемой не показанным цилиндропоршневым блоком в плоскости кровельной плиты, чтобы удлинить защитное действие кровельной плиты в направлении угольного забоя. При приближении выемочной машины он втягивается. Эти функциональные элементы отдельной крепежной опоры здесь показаны лишь в качестве примера. Имеются другие функциональные элементы, при этом речь идет, во-первых, о дополнительных датчиках силы, прежде всего, о гидравлических цилиндропоршневых блоках, а во-вторых, о не показанных здесь датчиках для управления автоматическим режимом работы. Эти цилиндропоршневые блоки приводятся в действие электрогидравлически с помощью клапанов и клапанов управления с исполнительным электромагнитом.
На фиг. 2 врубовая машина движется направо. Поэтому противоотжимной щиток крепежной опоры 17 должен быть убран. С другой стороны, блок желоба 25 (звено) крепежной опоры 9, который в направлении 19 движения находится за врубовой машиной 21, продвигается в направлении отбиваемой угольной стены. Следующие крепежные опоры 8, 7, 6, 5 и 4 также находятся в движении вперед в направлении отбиваемой угольной стены. На этих крепежных опорах противоотжимной щиток уже снова откинут вниз. Крепежные опоры 3, 2, 1 передвинуты и остаются в этом положении до тех пор, пока врубовая машина снова не приблизится справа.
Управление этими движениями происходит частично автоматически по введенной в память программе в зависимости от движений и положения врубовой машины в данный момент, частично при локальном или дистанционном обслуживании вручную.
Управление крепью и выемкой происходит из наземного главного центрального пункта 50 и/или подземного вспомогательного центрального пункта 33, также называемого пунктом управления или управляющим устройством лавы. Пункт управления находится не в лаве, в одном из боковых штреков, из которых производится выработка лавы. В главном центральном пункте 50 и/или вспомогательном центральном пункте 33 хранится программа для автоматического режима работы системы управления крепежными работами и автоматического ввода крепежных команд (извлечение, шагание, установка крепежных щитов) в зависимости от положения выемочной машины. Для этого главным центральным пунктом 50 и/или вспомогательным центральным пунктом программированным образом также могут запрашиваться измеренные величины (сигналы датчиков) отдельных датчиков. С главного центрального пункта 50 и/или вспомогательного центрального пункта 33 выдача команд и запрос сигналов датчиков может также происходить вручную.
Каждой из крепежных опор 1-18 придано соответственно одно устройство 34 управления щитом. Каждый прибор 34 управления щитом соединен с функциональными элементами своего крепежного щита, а именно, прежде всего, датчиками и исполнительными магнитами клапанов управления или же главных клапанов датчиков силы. Подробности по данному вопросу вытекают из цитированного уровня техники.
Приборы 34 управления щитами получают командные сигналы от пункта управления лавы в этом примере осуществления подземного вспомогательного центрального пункта 33 в одном из штреков.
Пункт управления оснащен экраном 31, на котором процесс выемки и крепления визуализируется для оператора, который через устройство 32 ввода при потребности и, прежде всего, в случае необходимости, может вмешаться и выдавать аварийные сигналы или же сигналы аварийной остановки.
Передача сигналов и команд происходит по многожильному кабелю 58 (шина, проводящая шина). Он соединяет все устройства 34 управления щитами между собой и с пунктом 33 управления. Кроме того, кабель служит для энергообеспечения крепежных опор, например управляющих магнитов гидравлических клапанов.
Из-за нескольких устройств 34 управления щитами проводящая шина на расстоянии от некоторых крепежных опор прерывается в преобразователях 59, и здесь электрические кабели подключаются к 60 блокам питания. Блоки питания подключены к центральной подаче напряжения по проводу 61.
Через каждые устройства управления щитами введенные или выданные в пункте управления команды по креплению, данные о состоянии и прочие данные принимаются всеми остальными и передаются дальше на все остальные, а также в пункт управления.
Однако, посредством предварительно определенного кодирования (кодовое слово щита) активируется только одно из устройств управления щитов 1-18 или группа устройств управления щитами для выполнения затребованной функции, например запрос измеренных величин или функция крепления, например в смысле извлечения, шагани, установки. Тогда активированное устройство управления щитами преобразует полученную функциональную команду, например запрос измеренной величины или команду по креплению, в команду на приданные соответствующему крепежному щиту функциональные элементы, датчики, клапаны управления или же главные клапаны.
Включение устройства управления определенным крепежным щитом и автоматический запуск функций и функциональных процессов описаны, например, в DE 19546427.3А1.
Очевидно, что процессы движения в лаве очень сложны и из-за особенности местной ситуации не могут быть обозримыми и прогнозируемыми отдельным лицом.
Поэтому эксплуатация выемочной машины согласно изобретению в целях полной автоматизации облегчается применением камер, что при малой трудоемкости измерений позволяет заменять или усиливать человеческий контроль очистного забоя и, прежде всего, предотвращение столкновений выемочной машины и крепи.
Для этого главный центральный пункт 50 и/или устройство управления лавой/вспомогательный центральный пункт 33 имеет память, в которой хранится модель 51 необходимого поперечного сечения проезда для всех поперечных сечений лавы на расстоянии от крепежной опоры. Такая модель 51 на фиг. 1 нанесена штрихпунктиром на фактическое поперечное сечение проезда в виде поверхности, и на фиг. 4 показана как поверхность с размерами, точками измерения и реперными точками размеров. Модель проезда, поскольку крепь состоит из идентичных крепежных опор, для лавы изготавливается один раз вручную или путем тестовых проходов с соответствующим выравниванием на выемочной машине. Она определена как контур поверхности, которая здесь описана штрихпунктиром, и в этой форме сохранена в устройстве управления лавы. Но она также может быть определена характерными конструктивными элементами, которые определяют имеющееся в распоряжении поперечное сечение проезда, и их размерами. На фиг. 4 обозначены такие конструктивные элементы, их размеры, точки измерения и реперные точки их размеров.
а - это расстояние между реперными точками боковой кромки желоба со стороны пласта и внутренней кромкой кабельного надставного щитка (Kabelbracke) на желобе, измеренное как длина выдвижения шагающего поршня 29 с прибавлением конструктивной ширины желоба,
b - это конструктивная высота кабельного надставного щитка
d - это наклон кровельной плиты
с - это длина выдвижения поршня 30, измеренная датчиком в цилиндре между соответствующими реперными точками, возможно с прибавлением конструктивных размеров,
e - это расстояние между реперными точками: верхняя кромка кабельного надставного щитка и нижняя кромка камеры, измеренное датчиком расстояния на кабельном надставном щитке,
f - это расстояние между реперными точками: верхняя кромка кабельного надставного щитка и нижняя кромка выдвижного щитка,
g - это наклон откидного щитка.
С помощью этих параметров образуется многоугольник, который при соответствующем уменьшении, которое учитывает особые данности поперечных сечений лавы, служит в качестве модели проезда и с этими параметрами сохраняется в памяти устройства управления лавой. При каждом приближении выемочной машины устанавливается фактически имеющееся в распоряжении поперечное сечение проезда каждой из крепежных опор, желоба и т.д. Для определения служат камеры согласно изобретению.
Корпуса 35 камер с двумя камерами 36 в каждом случае установлены соответственно на одном щите на расстоянии нескольких щитов с противоположной областью 37 охвата в продольном направлении лавы. Однако корпуса камер на расстоянии нескольких щитов расположены так близко друг к другу, что зоны видимости соседних в продольном направлении камер в продольном направлении пересекаются так, что в любом случае является возможной надежная оценка изображения. Условия очистного забоя, например высота лавы, условия видимости, пыль и загрязнение, но и вид интеграции системы камер в очистном забое, например только облегчение ручных работ, избыточность для ручных работ или полная автоматизация и, прежде всего, вытекающие из этого требования безопасности, являются факторами, которые определяют расстояние между корпусами камер. Рассматриваются 3-8 щитов.
При этом следует отметить, что существует тенденция ограничивать количество камер, так как при большем количестве возрастает и вероятность отказа, который тогда приводит к остановке работы всего очистного забоя. Камеры охватывают в своей области 37 охвата в поперечном направлении относительно лавы свободное поперечное сечение лавы под кровлей 27, включая надставной щиток (Bracke), желоб и рабочую область врубовой машины. По длине лавы область 37 охвата охватывает несколько щитов (область наблюдения). Соседние области наблюдения / области 37 охвата ради безопасности могут также частично перекрываться.
В этой определенной области охвата регистрируется не только присутствие человека, но и любая оптически проявляющаяся аномалия очистного забоя, например выломанная стена пласта в области движения врубовой машины, и крепежных работ, например не убранные противоотжимные щитки 28, не передвинутые щиты, и передаются дальше на пункт управления в качестве массива визуальных данных или после оценки визуальных данных в качестве предупредительного сигнала или аварийного сигнала.
В каждом корпусе камер размещены две камеры 36. Между их оптическими центральными осями существует угол примерно в 120°. Этот угол зависит от поля зрения камер. Это поле зрения на фиг. 3 обозначено ссылочным обозначением 37 и выполнено на сером фоне. То есть, угол между центральными осями камер выбирается так, что поля зрения камер охватывают ход лавы между пластом и желобом 25 в поперечном направлении полностью и в продольном направлении на определенном расстоянии (область наблюдения).
Помимо обеих камер 36, каждый корпус 35 камер оснащен электроникой 38 камер с вычислительной мощностью, запоминающей емкостью, а также передатчиком/приемником для высокочастотных радиосигналов и, кроме того, радиоантенной 39. Некоторые из соседних корпусов камер также могут быть соединены друг с другом по кабелю 40 передачи данных. Эти корпуса камер образуют камерный остров, от которого происходит передача данных следующему корпусу камер или же следующему камерному острову по радио. Таким образом, несколько из корпусов камер могут обходиться без радиоустройств и антенн. Однако, предпочтительно, чтобы все корпуса камер были оснащены радиосвязью по причинам, которые будут рассмотрены далее.
Для коммуникации с очистным забоем и крепежными работами корпуса камер по радио и антеннам 41, а также кабелям 40 передачи данных интегрированы в локальную сеть (беспроводная локальная сеть).
При этом электроника 38 камер оснащена так, что поступающие по радио или кабелям передачи данных данные, которые не предназначены для одной из камер 36 соответствующего корпуса камер, сразу отправляются дальше.
Последний в лаве корпус камер соединен с пунктом 33 управления, предпочтительно, по световоду 42 (не показан) или электронному кабелю для передачи данных.
Оценка в простейшем случае может происходить посредством того, что фактический массив визуальных данных вводится в сохраненную как поверхность модель проезда в реперных точках, которые имеются и в том, и в другом, например на верхней кромке кабельного надставного щитка. Предупредительный сигнал или аварийный сигнал или сигнал разрешения производится в зависимости от того, входит ли сохраненная модель проезда в фактический массив визуальных данных в реперных точках без избытка.
В другом случае оценка может происходить посредством того, что устанавливается, входят ли описанные выше отличительные характеристические элементы, которые с их размерами лежат в основе модели проезда, в имеющуюся в распоряжении модель проезда. Для этого производится измерение этих конструктивных элементов в снятом фактическом массиве визуальных данных с учетом точек измерения и реперных точек измерения и устанавливается, входит ли сохраненная модель проезда в полученный с помощью этих фактических параметров многоугольник, или совпадают ли заложенные в памяти устройства управления лавой параметры с извлеченными из фактического массива визуальных данных параметрами или же отклоняются от них вне допустимых предельных значений.
Таким образом, опыт показывает, что упорядоченная бесперебойная работа очистного забоя и работ по креплению также зависит от факторов, прежде всего негеометрических факторов, которые не могут быть охвачены в геометрической модели. В этом отношении делается ссылка на п. 2 формулы изобретения. Поэтому предусмотрено, что достаточное число этих факторов контролируется одновременно со сравнением с моделью. Например, на фиг. 5 показано, что при мягком грунте одна крепежная опора зарылась и опрокинулась. При измерении и сравнении фактического поперечного сечения проезда и модели проезда эта ошибка, которая может привести к столкновению выемочной машины с крепежной опорой, в глаза не бросается. Она может быть обнаружена и сигнализирована, например, путем измерения наклона полоза и/или кровли и/или желоба.
Вычислительная емкость регистрирует определенные при сравнении отклонения и оценивает их в соответствии с заданными правилами и алгоритмами и/или сообщает о них п. 33 управления, где они визуализируются на экране 31 и анализируются оператором и используются для управления очистным забоем и работами по креплению. Также является возможным, использовать оценку в корпусах камер непосредственно для генерирования сигнала или аварийного сигнала, в случае если они соединены, так как в области штрека не всегда обеспечена радиопередача без помех.
Впрочем, возможна и передача по радио. Поэтому данные камер принимаются в пункте 33 управления и визуализируются на экране 31. Оператор с помощью устройства 32 ввода может соответствующим образом реагировать, когда переданные визуальные данные показывают, что это необходимо или целесообразно.
Прежде всего, целесообразным является использование тех корпусов камер и камер, которые находятся в области, то есть прямо перед положением в данный момент, в положении в данный момент и прямо за положением выемочной машины в данный момент. Предпочтительно, чтобы работа камер вне этой зоны отключалась и включалась, как и освещение только при приближении выемочной машины.
Впрочем, само собой разумеется, что наблюдение камерами с оценкой визуальных данных, как это предусмотрено согласно изобретению, возможно только при соответствующем высвечивании контролируемой области лавы. Из соображений обзорности, здесь не может быть показано, что высвечивание может быть улучшено, с одной стороны, за счет маркировочных полос, светящихся плакеток и т.п. на подлежащих выделению местах, а с другой стороны, за счет наложения инфракрасного света.
В определенных областях охвата регистрируется не только присутствие человека, но и каждая оптически проявляющаяся аномалия очистного забоя, например выломанная стена пласта в области движения врубовой машины, и работ по креплению, например не убранные противоотжимные щитки 28, не передвинутые щиты, но и, прежде всего, поперечное сечение проезда перед каждой из крепежных опор.
Это поперечное сечение проезда в качестве массива фактических визуальных данных передается дальше на пункт 33 управления, там сохраняется и анализируется по заданным правилам и алгоритмам. Ставится цель, чтобы камеры 36 производили полный охват визуальных данных. В этом случае, в блоках памяти корпусов камер может производиться сохранение визуальных данных. Дополнительно, производительность компьютера рассчитана так, что актуально зарегистрированные визуальные данные также могут сравниваться с более старыми, например последними, визуальными данными. Для анализа полученных камерами фактических массивов визуальных данных существуют две возможности:
- распознавать или предвидеть отклонения, опасность или грозящее нарушение очистного забоя или работ по креплению.
Сеть камер согласно изобретению также предусматривается в качестве избыточной и альтернативной сети для передачи данных вместо шины 58. Для этого описанные выше преобразователи 59 оснащаются радиоустройством, а также антенной 53. За счет этого становится возможным, параллельно или альтернативно передаче данных посредством проводящей шины 58, также передавать данные по сети камер или, прежде всего, когда частичные области проводящей шины 58 нарушены, по параллельной частичной области сети камер с помощью антенн 39 и/или кабеля 40 для передачи данных. Это особо благоприятно, так как передача данных посредством проводящей шины 58 из-за требующихся преобразований является относительно инертной, в то время как эстафетоподобная передача данных по сети камер существенно быстрее и поэтому подходит, прежде всего, для аварийных сигналов и сигналов аварийного останова. Но также становится возможным, при отказе проводящей шины 58, полностью или же лишь участками, передавать требующиеся данные по управлению для крепи и для выемочной машины по сети камер.
Уже известно (см. выше), что данные породы или прочие данные выемочной машины регистрируются с помощью особых датчиков на выемочной машине и сохраняются посредством соответствующей установленной на выемочной машине электроники для регистрации 41 эксплуатационных данных. Затем эти данные по радио передаются на несколько стационарно установленных вдоль лавы радиоприемников и в пункт управления: самый лучший или же самый полный в цифровом отношении сигнал используется для очистного забоя.
На фиг. 2 показана антенна этих регистрирующих устройств 41 на выемочной машине 21. Сеть камер по этому изобретению со своими WLAN-антеннами 39 может благоприятным образом использоваться для передачи излучаемых антенной 41 данных. Так как, предпочтительно все, корпуса камер оснащены радиосредствами, постоянно обеспечена локально непрерывная радиосвязь между выемочной машиной и по меньшей мере одним корпусом камеры.
Следует указать на то, что передача данных из пункта управления посредством проводящей шины к отдельным корпусам крепи с их приборами для управления щитами путем шифрования и кодирования данных выполнена так, что адресаты и отправители сигналов и команд могут быть идентифицированы, и данные и сигналы всегда предназначаются правильному отправителю или получателю.
За счет дополнительной сети камер согласно изобретению открывается не только вторая сеть данных, но и несколько путей передачи данных между сетью камер и регулярной сетью данных. Кроме того, камеры и корпуса камер вовлекаются в круг адресатов и отправителей данных и команд. Согласно изобретению предусматривается, что и данные, которые проходят через сеть камер, зашифрованы посредством соответствующего кодирования, которое позволяет производить идентификацию и адресацию. Кроме того, в сети камер такие данные, которые уже были однажды отправлены, выделяются, так что они тем же самым отправителем второй раз не отправляются. Это может происходить, например, за счет того, что данным, например визуальным данным, придается не только сигнал для идентификации места и направления съемки изображения, но и сигнал времени.
В одном усовершенствовании изобретения вдоль лавы устанавливается еще один комплект камер (не показан). Эти камеры располагаются с более высокой плотностью и большей избыточностью и перекрытием области их охвата, так как они служат для распознания лиц. Но их область охвата может быть ограничена в поперечном сечении лавы до ожидаемой области пребывания лиц. Этим камерам придается вторая независимая сеть камер. В результате этого возникает еще одна альтернатива и/или избыточность передачи данных, так как, кроме того, предусмотрено, что и эта сеть камер по проводам или радиоустройствам может быть связана с проводящей шиной 58 или первой сетью камер.
ССЫЛОЧНЫЕ ОБОЗНАЧЕНИЯ
1-18 крепежные секции 1-18, крепежный щит, щит
20 пласт 20
21 добывающая машина врубовая машина фрезерная машина выемочная машина 21
22 направление 22 выемки
23 режущее устройство, режущее колесо
24 режущее устройство, режущее колесо
25 конвейер, желоб, секция, звено 25
26 донная плита, полоз 26
27 кровельная плита, кровля 27
28 противоотжимной щиток 28
29 цилиндропоршневой блок, шагающий поршень, датчик 29 силы
30 цилиндропоршневой блок, датчик силы
31 экран 31
32 устройство ввода, клавиатура 32
33 подземный вспомогательный центральный пункт, пункт управления центральное управление, устройство управления лавой, центральное управление крепью и выемкой, прибор 33 управления лавой приборы для управления лавой / центрального управления
34 устройство 34 управления приборами, устройство управления щитами, прибор управления щитом, управление крепью
35 корпус 35 камер
36 камера 36
37 область охвата
38 электроника камер
39 радиоантенна, антенна камеры, WLAN-антенна, транспондер 39
40 кабель для передачи данных, кабель для передачи данных камеры
41 антенна, антенна очистного забоя, регистрация данных эксплуатации, устройство
42 световод
47 радиоустройство с антенной
48 блок питания, блок питания камеры
49 преобразователь
50 главный центральный пункт
51 модель проезда, модель контура, поверхность 51
52 передвижной колпак
53 передатчик, антенна
58 кабель, шина, сигнальный провод 58
59 преобразователь
60 блок 60 питания
61 провод 61
63 измеритель наклона, инклинометр.
В рамках этой заявки понятия штрековая стация, станция управления, центральный пункт управления, управление лавой, устройство управления лавой употребляются как синонимы для находящегося в одном из штреков или на земной поверхности управляющего устройства для управления выемкой и работ по креплению. Под понятием управление щитами или приборы управления щитами сведены воедино установленные на каждой крепежной опоре приборы управления, которые соединены между собой по шинной системе, которая в этой заявке называется проводящей шиной.
Изобретение относится к горному делу. Техническим результатом является обеспечение искробезопасной камеры, оснащенной электроникой, в лаве. В частности, предложена крепь лавы подземной горной разработки с выполненными в виде щитов крепежными опорами, каждая из которых имеет прибор управления щитом, причем приборы управления щитами соединены со штрековой станцией, представляющей собой устройство управления лавой, посредством проводящей шины с линиями передачи данных для передачи данных и токопроводами для энергоснабжения, а токопроводы соединены с расположенными на расстоянии блоками питания, причем крепежные опоры в области выемки выемочной машины, прежде всего фрезерной машины или врубовой машины, расположены вдоль лавы плотно друг к другу и образуют с конвейером коридор, в который направлены установленные на крепежных опорах искробезопасные камеры с электронной регистрацией света, причем камеры соединены со штрековой станцией для передачи данных. При этом вдоль лавы на расстоянии от нескольких крепежных опор на соответственно одной из крепежных опор области наблюдения установлены группы камер по две камеры в каждой в, предпочтительно, одном корпусе камер на группу камер с противоположной оптической ориентацией в продольном направлении коридора и наиболее полным охватом поперечного сечения проезда коридора, обе камеры каждой группы камер оснащены искробезопасной электроникой, которая содержит процессор для обработки данных, накопитель данных и радиоприбор для высокочастотной передачи данных с антенной для беспроводного подключения к локальной сети, каждой камере и группе камер присвоен адресный код, который придается принимаемым данным для идентификации соответствующей камеры. 17 з.п. ф-лы, 5 ил.
1. Крепь лавы подземной горной разработки с выполненными в виде щитов крепежными опорами, каждая из которых имеет прибор управления щитом, причем приборы управления щитами соединены со штрековой станцией, представляющей собой устройство управления лавой, посредством проводящей шины с линиями передачи данных для передачи данных и токопроводами для энергоснабжения, а токопроводы соединены с расположенными на расстоянии блоками питания, причем крепежные опоры в области выемки выемочной машины, прежде всего фрезерной машины или врубовой машины, расположены вдоль лавы плотно друг к другу и образуют с конвейером коридор, в который направлены установленные на крепежных опорах искробезопасные камеры с электронной регистрацией света, причем камеры соединены со штрековой станцией для передачи данных,
отличающаяся тем, что
- вдоль лавы на расстоянии от нескольких крепежных опор на соответственно одной из крепежных опор (1-18) области наблюдения установлены группы камер по две камеры (36) в каждой в, предпочтительно, одном корпусе (35) камер на группу камер с противоположной оптической ориентацией в продольном направлении коридора и наиболее полным охватом поперечного сечения проезда коридора,
- обе камеры (36) каждой группы камер оснащены искробезопасной электроникой (38), которая содержит процессор для обработки данных, накопитель данных и радиоприбор (39) для высокочастотной передачи данных с антенной для беспроводного подключения к локальной сети,
- каждой камере и группе камер присвоен адресный код, который придается принимаемым данным для идентификации соответствующей камеры.
2. Крепь лавы по п. 1, отличающаяся тем, что устройство управления лавой содержит радиоприбор для высокочастотной передачи данных с антенной для беспроводного подключения к локальной сети камер.
3. Крепь лавы по п. 1, отличающаяся тем, что локальная сеть камер в областях, которые склонны к радиопомехам или являются слишком длинными и необозримыми для беспроводного подключения, прежде всего между устройством управления лавой и ближайшей группой камер или островом из нескольких соседних групп камер, образована посредством световодов или кабелей.
4. Крепь лавы по п. 1, отличающаяся тем, что несколько групп камер для энергоснабжения соотнесены с общим блоком (60) питания.
5. Крепь лавы по п. 1, отличающаяся тем, что каждой камере (36) и каждой группе (35) камер присвоен код камеры, который придается отправляемым данным для идентификации отдельной группы камер и, предпочтительно, также для обозначения оптической ориентации передаваемых визуальных данных.
6. Крепь лавы по п. 5, отличающаяся тем, что электроника (38) каждой группы камер выполнена так, что маркированные чужим кодом камеры и маркированные чужим адресным кодом данные и сигналы сразу после приема передаются к отправке.
7. Крепь лавы по п. 1, отличающаяся тем, что устройство (33) управления лавой содержит экран (31) для представления передаваемых визуальных данных, и что, предпочтительно, визуальные данные также передаются на земную поверхность.
8. Крепь лавы по п. 1, отличающаяся тем, что данные и сигналы, прежде всего аварийные сигналы и сигналы аварийного останова между приборами (34) управления щитами и устройством (33) управления лавой, передаются посредством проводящей шины (58) и по сети камер параллельно или альтернативно, причем устройство управления лавой и приборы управления щитами предпочтительно содержат интерфейсы для передачи данных между проводящей шиной и сетью камер.
9. Крепь лавы по п. 1, отличающаяся тем, что для управления очистным забоем выемочной машины (21) и для управления крепежными работами, прежде всего крепежными опорами (1-18) и желобом (25), выемочная машина содержит устройства регистрации данных для регистрации положения, и/или рабочего состояния, и/или мгновенной производительности подачи, и/или мгновенного вращательного момента, и/или прохождения вида породы и пласта и посредством радиоприбора для высокочастотной передачи данных с антенной беспроводным образом соединена с одной из групп камер и сетью камер.
10. Крепь лавы по п. 1, отличающаяся тем, что для управления очистным забоем выемочной машины (21) и для управления крепежными работами, прежде всего крепежными опорами (1-18) и желобом (25), электроника (38) камер (36) выполнена с возможностью поддержки автоматического анализа изображений, который делает возможным автоматизированное обнаружение опасности, прежде всего, посредством:
- хранения визуальных данных, заданных как известные,
- регистрации фактических визуальных данных,
- сравнения сохраненных заданных визуальных данных и фактических визуальных данных,
- регистрации отличий между изображениями,
- регистрации и сигнализации распознанных опасных или разрешенных ситуаций,
- прежде всего, передачи обрабатываемого в смысле разрешения движения сигнала на систему управления работой выемочной машины,
- прежде всего, передачи разрешения движения для выемочной машины только тогда, когда точки изображения выбранных параметров обнаруживаются в заранее определенных положениях.
11. Крепь лавы по п. 10, отличающаяся тем,
что для сохранения заданных визуальных данных:
- заданное поперечное сечение проезда коридора в качестве модели проезда или модели контура с реперными точками размеров сохраняется в памяти устройства (33) управления лавой,
что для регистрации фактических визуальных данных:
- электронные камеры периодически при каждом приближении выемочной машины снимают изображение фактически имеющегося перпендикулярно направлению движения поперечного сечения проезда коридора с известным заданным уменьшением (фактор масштабирования),
- измеряется фактическое положение реперных точек, предпочтительно посредством анализа фактических визуальных данных,
- снятое фактическое изображение с определенным положением реперных точек передается устройству (33) управления лавой,
что для регистрации отличий между изображениями:
- устройство (33) управления лавой посредством соответствующего программирования проводит сравнение площадей, и для этого вводит модель проезда или модель контура в снятое камерой фактическое изображение в заданных реперных точках, которые имеются на обоих изображениях и обозначают идентичные элементы поперечного сечения проезда коридора, предпочтительно в одной или нескольких из реперных точек, и выдает обрабатываемый в смысле разрешения движения сигнал на систему управления выемочной машины, если изображения без избытка совпадают друг с другом.
12. Крепь лавы по п. 10, отличающаяся тем,
что для сохранения заданных визуальных данных
- размеры выбранных характеристических элементов необходимого поперечного сечения проезда коридора, которое требуется выемочной машине в определенных положениях ее режущих шнеков (23, 24) для беспрепятственного прохода, регистрируют как выбранные параметры модели проезда с одним из размеров: наклон, расстояние, длина и сохраняют в памяти устройства (33) управления лавой,
что для регистрации фактических визуальных данных
- электронные камеры периодически при каждом приближении выемочной машины снимают изображение фактически имеющегося перпендикулярно направлению движения поперечного сечения проезда с известным заданным уменьшением,
- снятые фактические визуальные данные передаются на устройство (33) управления лавой,
что для регистрации и сигнализации распознанных опасных и разрешенных ситуаций
- устройство (33) управления лавой посредством соответствующего программирования анализа изображений в каждом из переданных фактических изображений поперечного сечения проезда распознает идентичные характеристические элементы и для определения фактических визуальных данных измеряет фактические величины выбранных параметров относительно наклона или же расстояния или же длины,
- устройство (33) управления лавой выдает обрабатываемый в смысле разрешения движения сигнал на систему управления работой выемочной машины в зависимости от того, совпадают ли и каким образом совпадают фактические визуальные данные соответствующих параметров с заданными визуальными данными соответствующих параметров модели проезда или же отклоняются от них.
13. Крепь лавы по п. 11 или 12, отличающаяся тем, что размеры конструктивных элементов крепи лавы, в частности крепежной опоры, желоба, кабельного надставного щитка, конвейера и выемочной машины, насколько они определяют поперечное сечение проезда коридора, с одним из размеров: наклон, расстояние, длина, а также реперные точки размеров однозначно определяют, сохраняют в памяти устройства управления и используют с прочими подходящими параметрами для получения модели проезда/контура поперечного сечения проезда коридора.
14. Крепь лавы по п. 10, отличающаяся тем, что по меньшей мере три из следующих условных величин:
- давление в стойках для установления того, установлена ли и прочно ли закреплена крепь, посредством датчиков давления в стойках,
- давление и/или ход шагающих цилиндров для установления расстояния между конвейером и крепью посредством датчиков давления и/или датчиков хода на шагающих цилиндрах,
- положение подвижного колпака относительно кровли посредством датчика давления или измерителя расстояния в подвижном колпаке,
- положение/положение поворота откидного колпака посредством, прежде всего, инклинометра,
- наклон кровли в направлении забоя посредством, прежде всего, инклинометра,
- наклон конвейера, прежде всего, перпендикулярно направлению транспортировки (Х-направлению) посредством, прежде всего, инклинометра на желобе или же секции желоба,
- наклон нижней плиты/полоза в направлении угольного забоя посредством, прежде всего, инклинометра на этой конструктивной детали,
устанавливают посредством подходящих датчиков измеряемых величин в подходящих измерительных положениях при определении заданного поперечного сечения требующегося поперечного сечения проезда и в качестве заданных величин сохраняют в памяти, а также снова и раз за разом устанавливают при определении фактического поперечного сечения, и в качестве фактических значений условных величин сравнивают с сохраненным в памяти заданным значением, и что управляющее устройство выдает обрабатываемый в смысле разрешения движения сигнал на систему управления работой выемочной машины только тогда, когда при сравнении заданного с фактическим отличие находится в пределах заданных предельных значений.
15. Крепь лавы по п. 1, отличающаяся тем, что в коридоре составляющие поперечное сечение проезда характеристические элементы, которые служат в качестве точек изображения и/или реперных точек, выполнены различимыми путем нанесения маркировок, светящихся плакеток, светящихся полос, цветовых маркировок или т.п.
16. Крепь лавы по п. 1, отличающаяся тем, что для распознания лиц на примечательных деталях щитов нанесены отражательные полосы, и при обработке и анализе снятых изображений поперечного сечения проезда нарушение изображения отражательных полос сигнализируется как возможная опасность.
17. Крепь лавы по п. 1, отличающаяся тем, что для распознания лиц между стойками на регулярных расстояниях друг от друга, предпочтительно со смещением на два щита, предпочтительно с собственной сетью и собственным адресным диапазоном, устанавливают камеры второй системы камер.
18. Крепь лавы по п. 16, отличающаяся тем, что для освещения поперечных сечений проезда также используют инфракрасный свет, и путем обработки изображений устанавливают, вызвано ли нарушение изображения отражательных полос людьми.
| DE 102013204155 A1, 11.09.2014 | |||
| СПОСОБ УПРАВЛЕНИЯ ШАГАЮЩИМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459956C2 |
| US 4355895 A1, 26.10.1982 | |||
| US 6361119 B1, 26.03.2002 | |||
| WO 2008138316 A2, 20.11.2008. | |||

