Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления транспортного средства для управления автономным транспортным средством.
Уровень техники
[0002] Навигационные устройства широко используются для планирования маршрутов из начальных точек, чтобы задавать пункты назначения. Например, известно навигационное устройство, которое планирует маршрут без учета необязательного объезда, даже когда пункт назначения не определяется точно при начале движения (см. патентный документ 1). Такое навигационное устройство выполняет поиск множества маршрутов в предварительные пункты назначения и запрашивает пользователя в отношении необходимости сокращать число пунктов назначения при приближении к развязке маршрутов.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация не прошедшей экспертизу заявки на патент (Япония) номер 2011-209027
Сущность изобретения
[0004] Тем не менее, навигационное устройство, описанное в патентном документе 1, по-прежнему требует от пользователя указывать конечный пункт назначения; в противном случае, навигация на основе инструкций по маршруту не может продолжаться.
[0005] В связи с вышеизложенным, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления транспортного средства, допускающее начало автономного передвижения перед указанием конкретного пункта назначения и плавное продолжение автономного передвижения до достижения конечного пункта назначения.
[0006] Устройство управления транспортного средства используется в автономном транспортном средстве, автономно управляемом с возможностью ехать по определенному маршруту передвижения, и включает в себя модуль задания пунктов назначения, модуль задания маршрутов и модуль представления. Модуль задания пунктов назначения задает пункт назначения в качестве глобальной области для определения маршрута передвижения. Модуль задания маршрутов размещает предварительный пункт назначения на границе области пункта назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт назначения, с тем чтобы определять маршрут передвижения, проходящий через предварительный пункт назначения. Модуль представления предоставляет пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство движется по маршруту передвижения в предварительный пункт назначения, так что задача выполняется в области пункта назначения после достижения предварительного пункта назначения.
Краткое описание чертежей
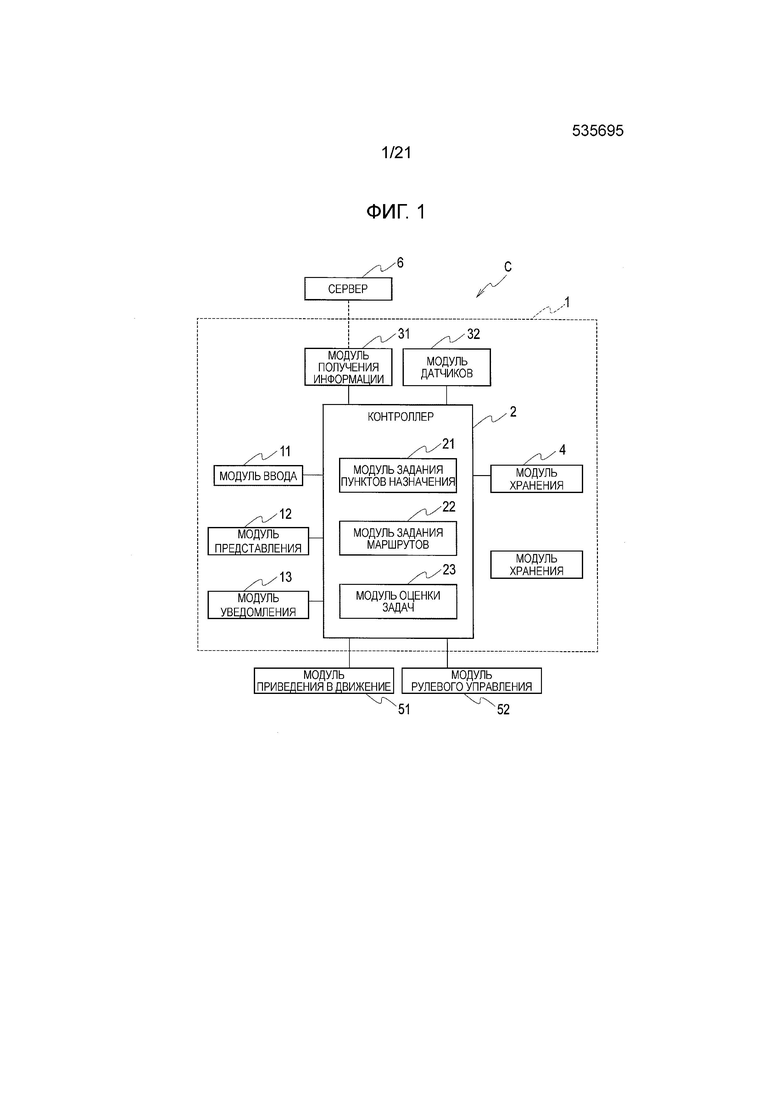
[0007] Фиг. 1 является блок-схемой для описания фундаментальной конфигурации автономного транспортного средства согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций способа для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
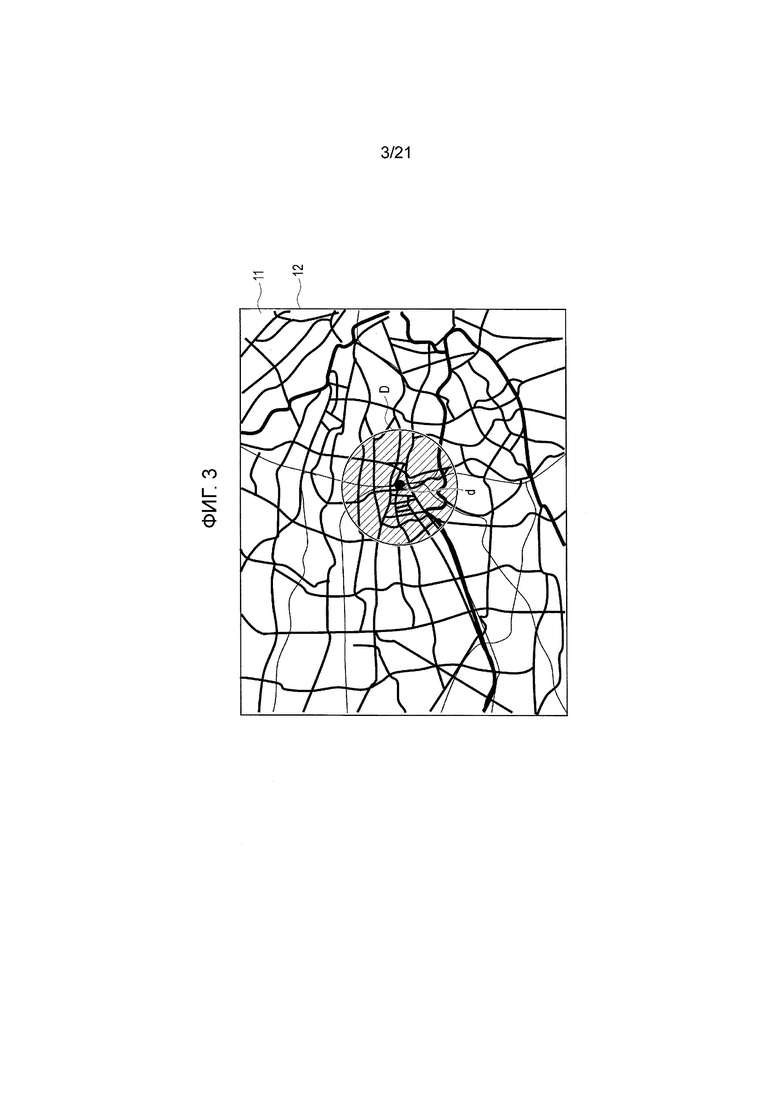
Фиг. 3 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
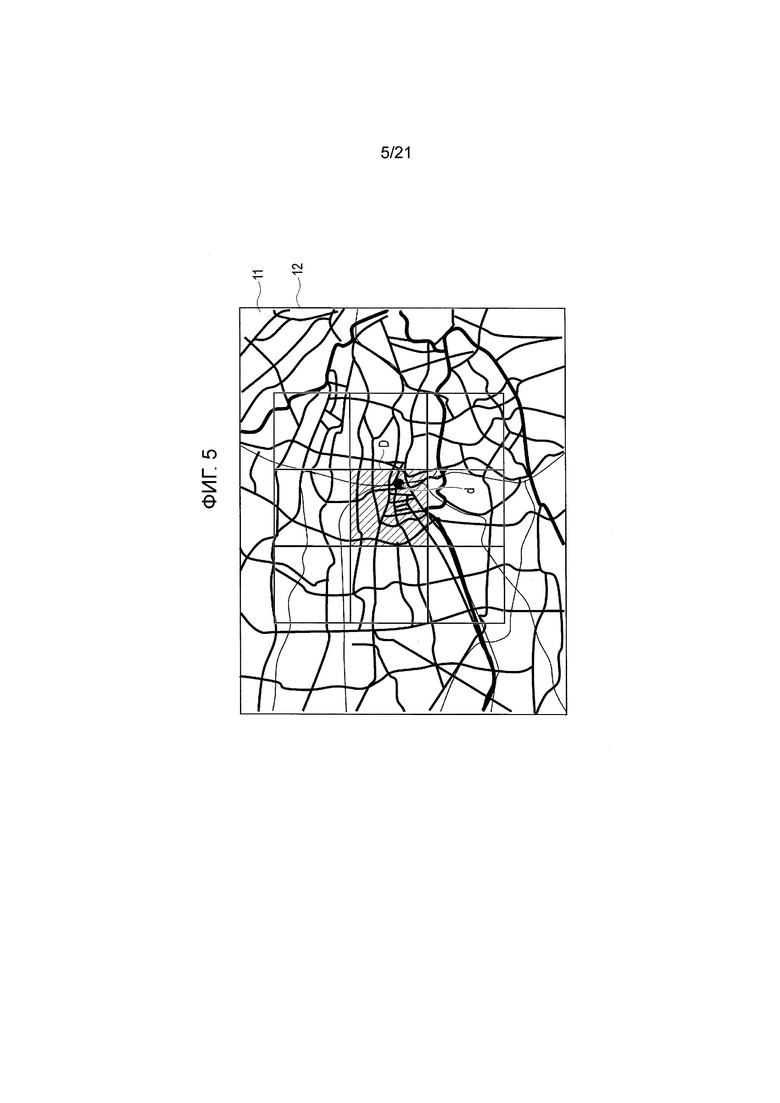
Фиг. 5 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
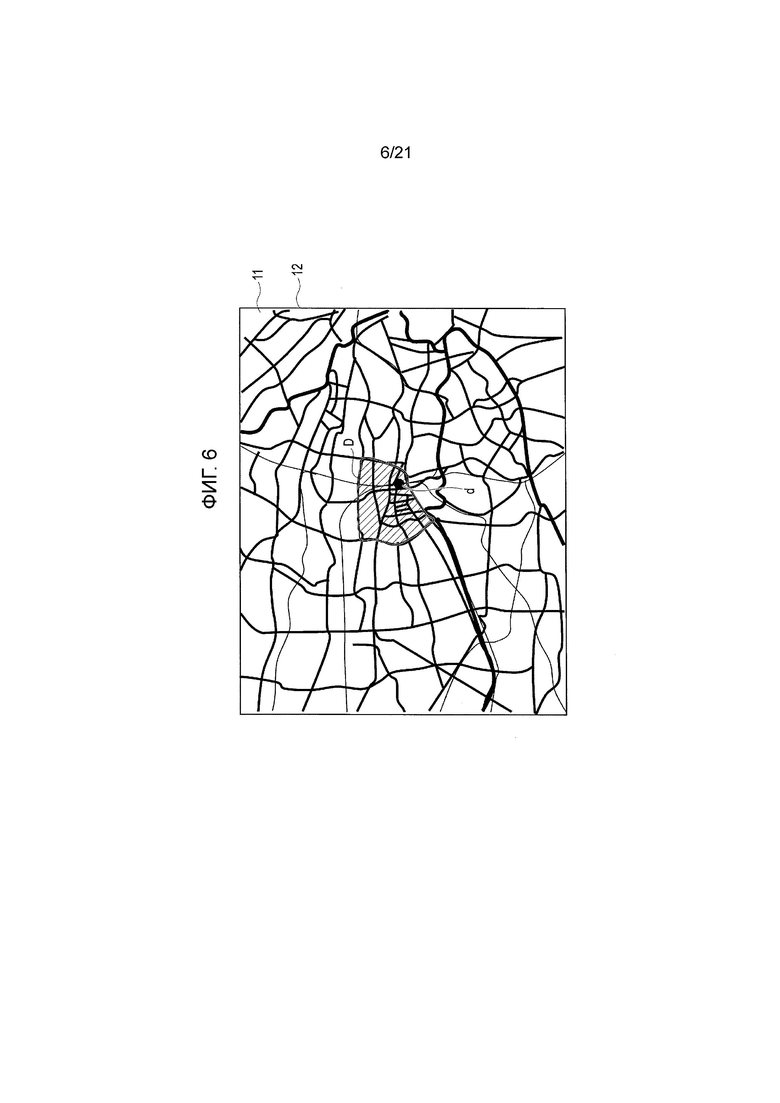
Фиг. 6 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 9 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 10 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
Фиг. 11 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно первому варианту осуществления настоящего изобретения.
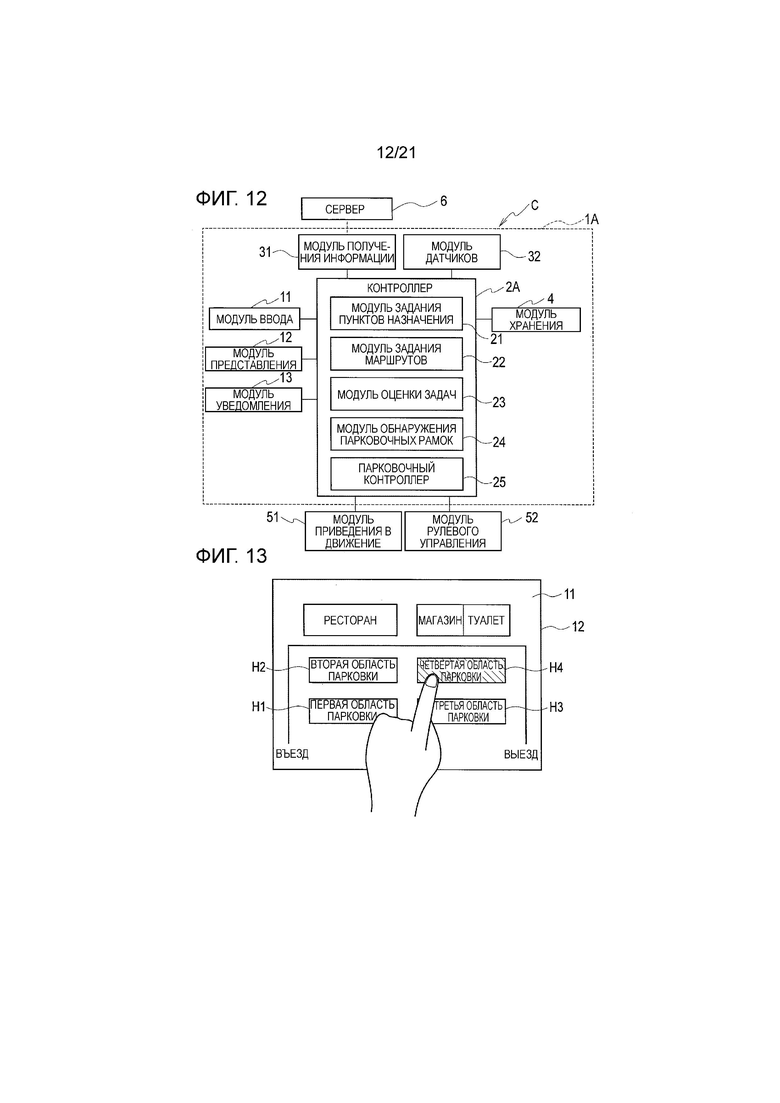
Фиг. 12 является блок-схемой для описания фундаментальной конфигурации автономного транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 13 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
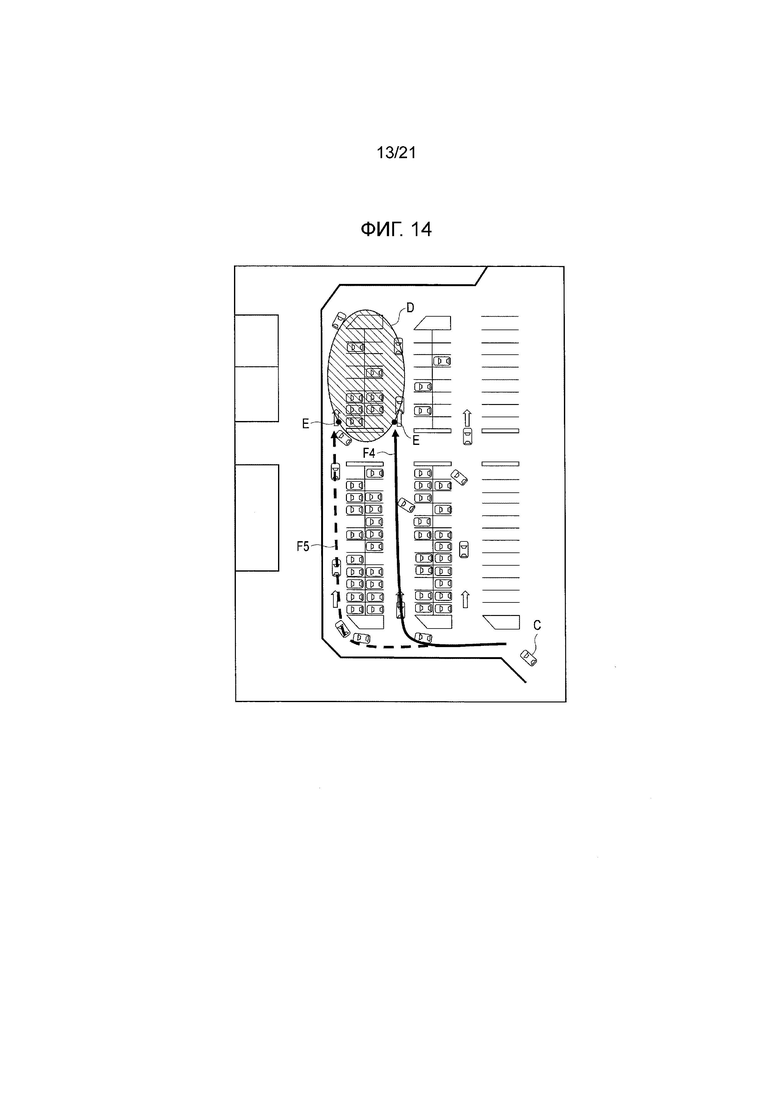
Фиг. 14 является видом сверху автономного транспортного средства на автомобильной парковке для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
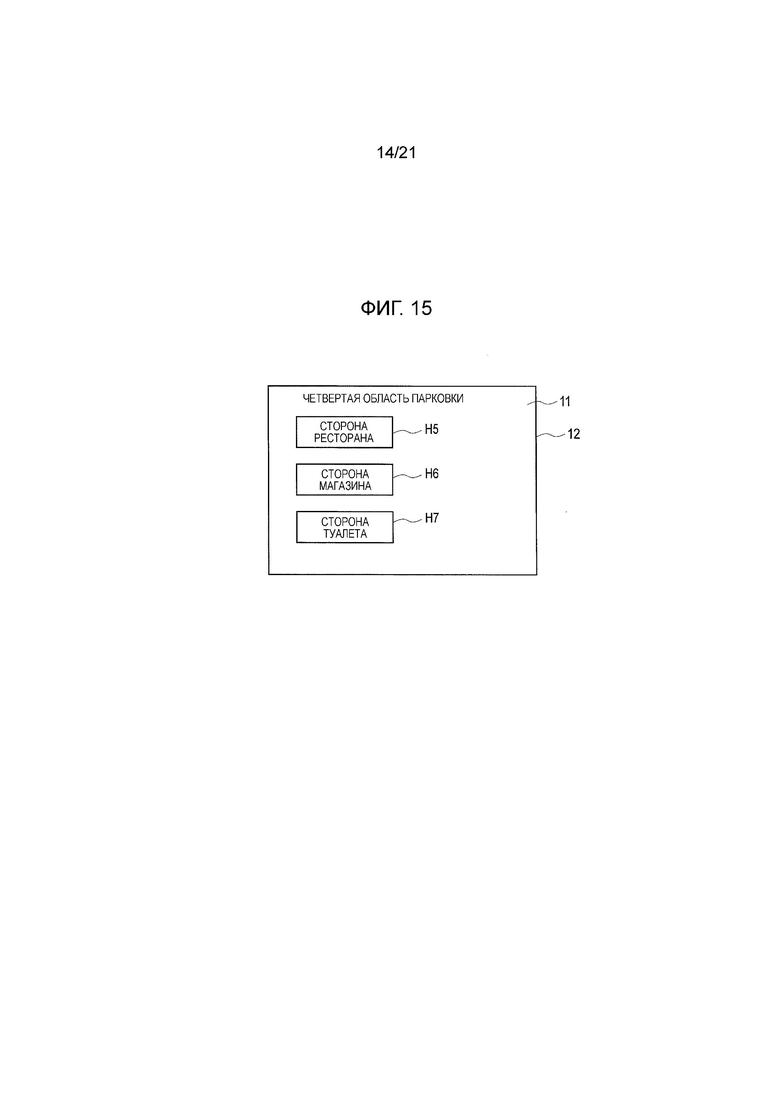
Фиг. 15 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
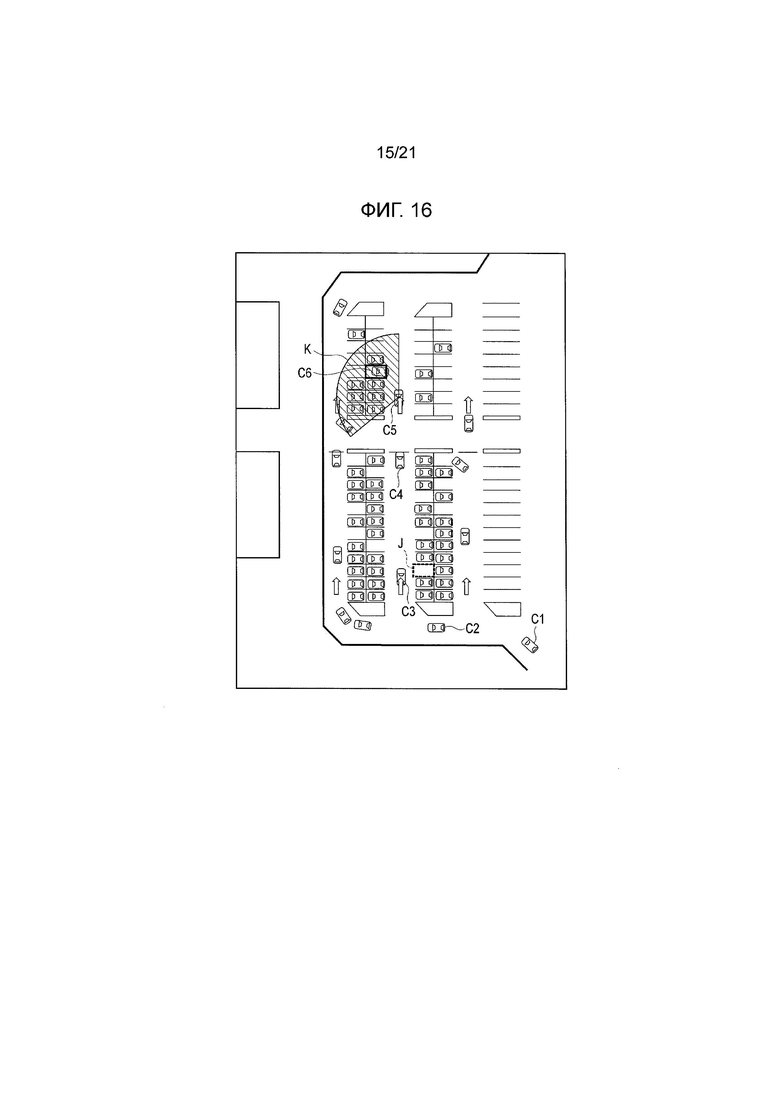
Фиг. 16 является видом сверху автономного транспортного средства на автомобильной парковке для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 17 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 18 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
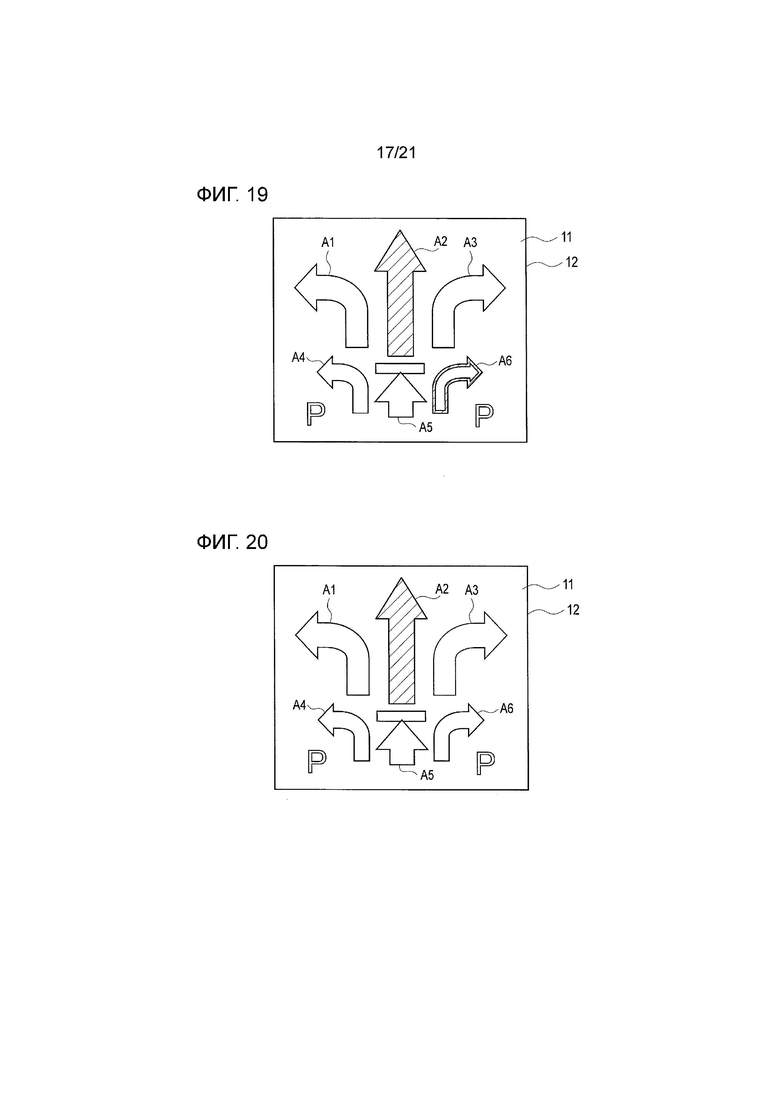
Фиг. 19 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 20 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
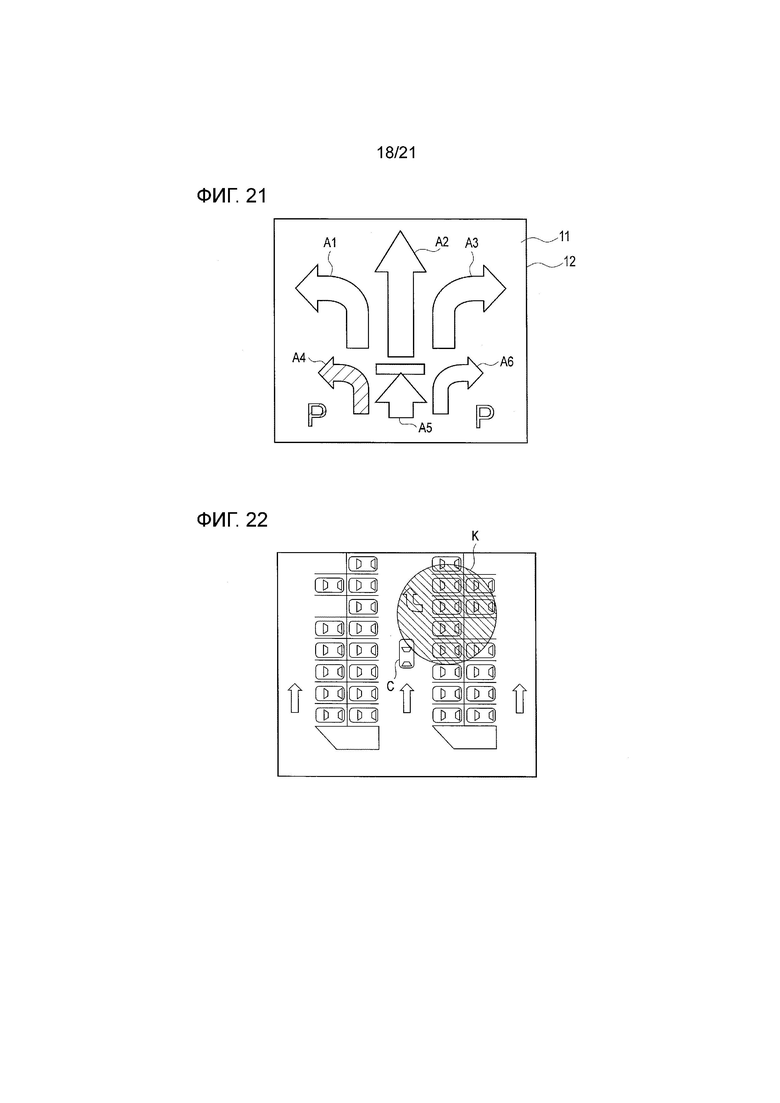
Фиг. 21 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 22 является видом сверху автономного транспортного средства на автомобильной парковке для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
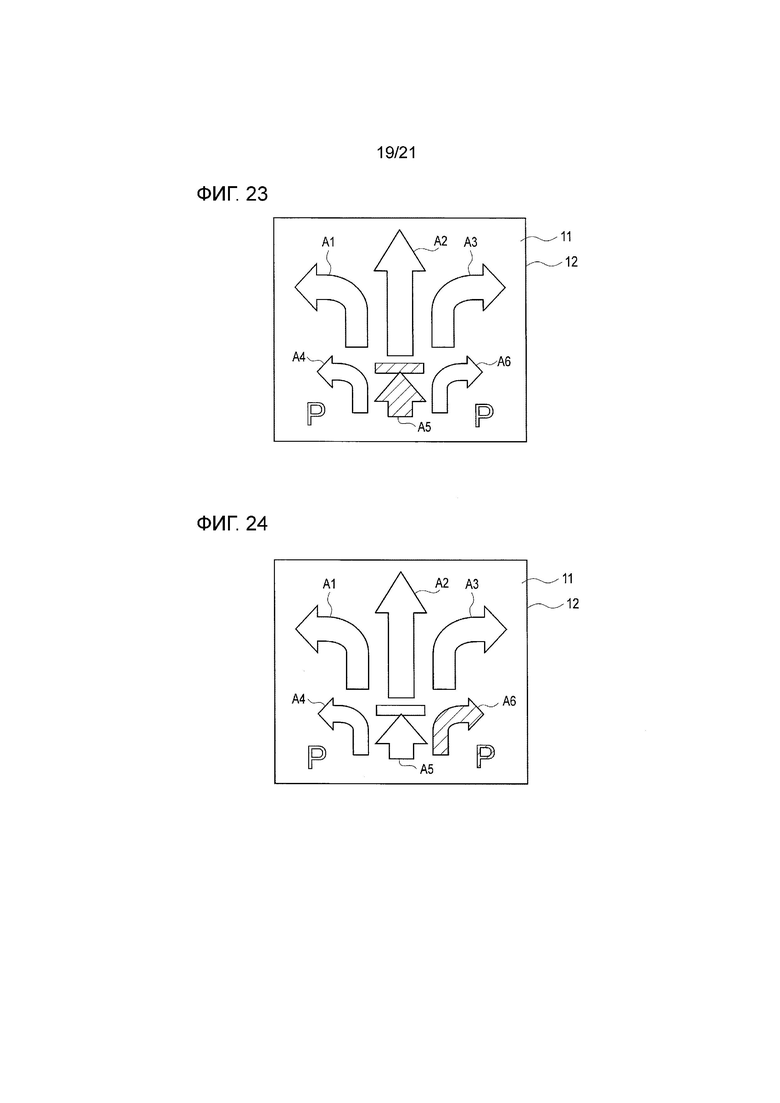
Фиг. 23 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 24 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
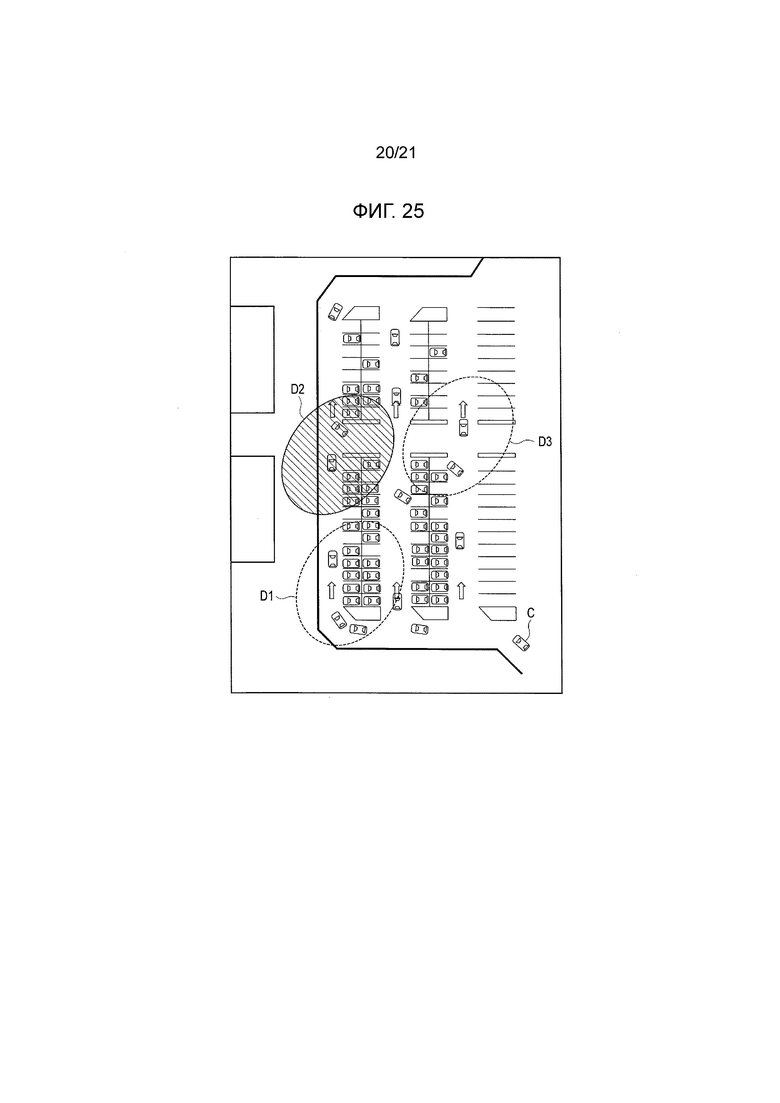
Фиг. 25 является видом сверху автономного транспортного средства на автомобильной парковке для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Фиг. 26 является примерным видом, показывающим модуль ввода и модуль представления для описания работы устройства управления транспортного средства, включенного в автономное транспортное средство согласно второму варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0008] Далее описываются первый и второй варианты осуществления настоящего изобретения со ссылкой на чертежи. Идентичные или аналогичные элементы, показанные на чертежах, указываются посредством идентичных или аналогичных ссылок с номерами, и перекрывающиеся описания не повторяются.
[0009] Первый вариант осуществления
Как показано на фиг. 1, автономное транспортное средство C согласно варианту осуществления настоящего изобретения включает в себя модуль 51 приведения в движение для ускорения и замедления автономного транспортного средства C, модуль 52 рулевого управления для руления автономным транспортным средством C и устройство 1 управления транспортного средства для управления модулем 51 приведения в движение и модулем 52 рулевого управления таким образом, чтобы обеспечивать движение автономного транспортного средства C. Автономное транспортное средство C автономно управляется с возможностью ехать по маршруту передвижения, определенному посредством устройства 1 управления транспортного средства.
[0010] Модуль 1 управления транспортного средства включает в себя модуль 11 ввода, который вводит, в автономное транспортное средство C, сигнал, соответствующий операции, выполняемой пользователем автономного транспортного средства C, модуль 12 представления, который предоставляет пользователю информацию, модуль 13 уведомления, который уведомляет пользователя относительно информации, и контроллер 2, который управляет соответствующими компонентами, включенными в автономное транспортное средство C. Устройство 1 управления транспортного средства дополнительно включает в себя модуль 31 получения информации, который получает информацию относительно автономного передвижения, модуль 32 датчиков, который обнаруживает информацию окружения автономного транспортного средства C, и модуль 4 хранения, который сохраняет данные, необходимые для обработки, выполняемой посредством контроллера 2.
[0011] Модуль 11 ввода включает в себя устройство ввода, которое принимает операцию, выполняемую пользователем, и дополнительно вводит сигнал, соответствующий операции, в контроллер 2. Модуль 12 представления включает в себя устройство отображения, имеющее экран, на котором отображаются изображения и символы, предоставляемые для пользователя, и устройство вывода для воспроизведения речи, к примеру, динамик. Модуль 12 представления указывает задачи, реализованные посредством автономного транспортного средства C, в качестве элементов, выбранных пользователем. Дисплей с сенсорной панелью служит, например, как в качестве модуля 11 ввода, так и в качестве модуля 12 представления. Модуль 13 уведомления включает в себя устройство вывода для воспроизведения речи, к примеру, динамик. Модуль 13 уведомления может быть аппаратным элементом, идентичным модулю 12 представления.
[0012] Контроллер 2 включает в себя модуль 21 задания пунктов назначения, который задает пункт назначения для определения маршрута передвижения, по которому едет автономное транспортное средство C, модуль 22 задания маршрутов, который определяет маршрут передвижения на основе пункта назначения, и модуль 23 оценки задач, который оценивает задачи, предлагаемые пользователю. Контроллер 2 представляет собой, например, компьютер, включающий в себя центральный процессор (CPU) для того, чтобы реализовывать обработку вычисления, необходимую для приведения в движение автономного транспортного средства C. Контроллер 2, модуль 21 задания пунктов назначения, модуль 22 задания маршрутов и модуль 23 оценки задач указываются посредством элементов, имеющих логические структуры, и могут предоставляться в качестве независимых аппаратных элементов или могут предоставляться в качестве интегрированного аппаратного элемента. Контроллер 2 управляет автономным транспортным средством C таким образом, чтобы безопасно и комфортно ехать по маршруту передвижения, согласно информации из модуля 31 получения информации, модуля 32 датчиков и модуля 4 хранения.
[0013] Модуль 21 задания пунктов назначения задает пункт назначения в качестве глобальной области для определения маршрута передвижения на основе сигнала, выводимого из модуля 11 ввода и соответствующего пользовательской операции. Модуль 22 задания маршрутов размещает предварительный пункт назначения на границе конечной области на основе условий поиска маршрутов, включающих в себя пункт назначения, заданный посредством модуля 21 задания пунктов назначения, и текущую позицию, и выполняет поиск и определяет маршрут передвижения, проходящий через предварительный пункт назначения. Условия поиска маршрутов дополнительно могут включать в себя информацию трафика и правила дорожного движения относительно маршрута передвижения и его периферии, часовые пояса, классификацию дорог и приоритетности при определении маршрута.
[0014] Модуль 23 оценки задач получает информацию задач, по меньшей мере, из одного из модуля 4 хранения и модуля 31 получения информации, с тем чтобы оценивать задачи, предлагаемые пользователю, на основе информации задач. Модуль 23 оценки задач предоставляет пользователю оцененные задачи через модуль 12 представления. Модуль 23 оценки задач получает, из модуля 4 хранения или модуля 31 получения информации, информацию задач, включающую в себя предысторию задач, выбираемых пользователем, оцененные часовые пояса, в которых выполняются задачи, предысторию движения в пункты назначения и информацию мест в конечных областях. Термин "задачи" при использовании в данном документе означает достижение необязательных мест, число которых может сокращаться в зависимости от действий пользователя, таких как прием пищи, поездки в места отдыха и развлечений и поездки за покупками.
[0015] Модуль 31 получения информации получает информацию извне через беспроводную связь и вводит информацию в контроллер 2. Модуль 31 получения информации получает текущую позицию автономного транспортного средства C согласно системе позиционирования, такой как глобальная система позиционирования (GPS). Модуль 31 получения информации также получает пользовательскую информацию через сеть из внешнего сервера 6, который хранит информацию пользователя, включающую в себя, по меньшей мере, одно из регистрационной информации пользователя относительно автономного транспортного средства C, предыстории отправок данных и предыстории действий. Модуль 31 получения информации может получать информацию трафика, такую как ограничения движения или дорожная пробка, и картографические данные из сервера 6.
[0016] Модуль 32 датчиков включает в себя такие датчики, как камера, устройство измерения расстояния и спидометр. Датчики, при использовании электромагнитных волн, могут обнаруживать различные полосы частот, к примеру, радиоволны, инфракрасный свет и видимый свет. Модуль 32 датчиков обнаруживает информацию окружения автономного транспортного средства C, включающую в себя другие транспортные средства, помехи, совмещения маршрутов передвижения, ширины дорог, указательные знаки, дорожные знаки, границы полос движения и дорожные условия, и вводит информацию в контроллер 2.
[0017] Модуль 4 хранения включает в себя устройство хранения данных, такое как магнитный диск или полупроводниковое запоминающее устройство. Модуль 4 хранения сохраняет различные виды данных, включающих в себя программы, необходимые для обработки реализованного посредством контроллера 2, картографические данные и правила дорожного движения. Модуль 4 хранения также может служить в качестве энергозависимого носителя хранения данных для обработки, реализованной посредством контроллера 2.
[0018] Работа устройства управления транспортного средства
Ниже описывается пример работы устройства 1 управления транспортного средства, включенного в автономное транспортное средство C согласно первому варианту осуществления, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 2.
[0019] Во-первых, на этапе S101, контроллер 2 находится в состоянии готовности для ввода сигнала из модуля 11 ввода, соответствующего операции пользователем. Когда сигнал, соответствующий операции пользователем, вводится из модуля 11 ввода, модуль 21 задания пунктов назначения на этапе S102 определяет то, указана или нет конечная область.
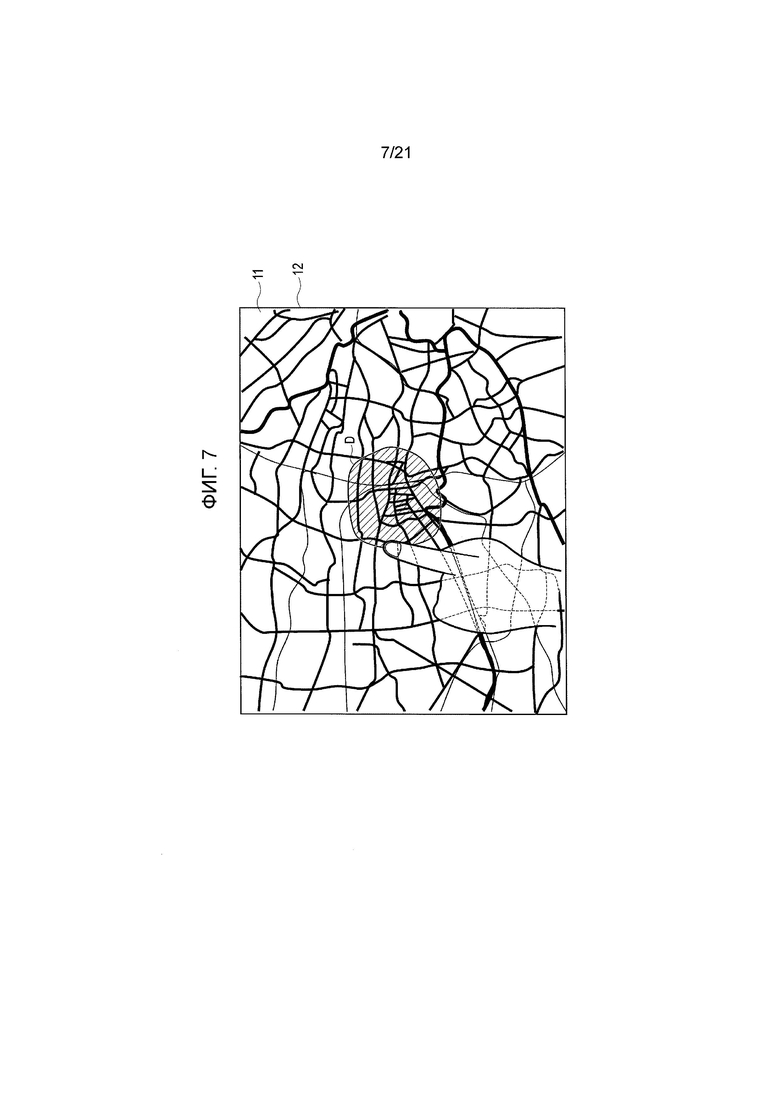
[0020] Модуль 12 представления управляется посредством контроллера 2 таким образом, чтобы обращаться к картографическим данным в модуле 31 получения информации или модуле 4 хранения, и отображает карту на экране, например, как показано на фиг. 3. Когда необязательная точка d указана посредством операции пользователя, выполняемой в модуле 11 ввода, модуль 21 задания пунктов назначения размещает пункт D назначения в круговой области, имеющей предварительно определенный радиус около точки d на карте. Модуль 21 задания пунктов назначения может размещать пункт D назначения в области административной секции (в административном разделении населенных пунктов или префектур), включающей в себя точку d, как показано на фиг. 4, в решетчатой области, включающей в себя точку d, как показано на фиг. 5, или в области, окруженной посредством главных дорог, включающей в себя точку d, как показано на фиг. 6. Альтернативно, модуль 21 задания пунктов назначения может размещать пункт D назначения в необязательной области, нарисованной посредством пользовательской операции с помощью пальца на карте, как показано на фиг. 7.
[0021] Контроллер 2 задает возврат процесса к этапу S101, когда пункт D назначения еще не определен на этапе S102, и задает переход процесса к этапу S103, когда пункт D назначения определяется на этапе S102.
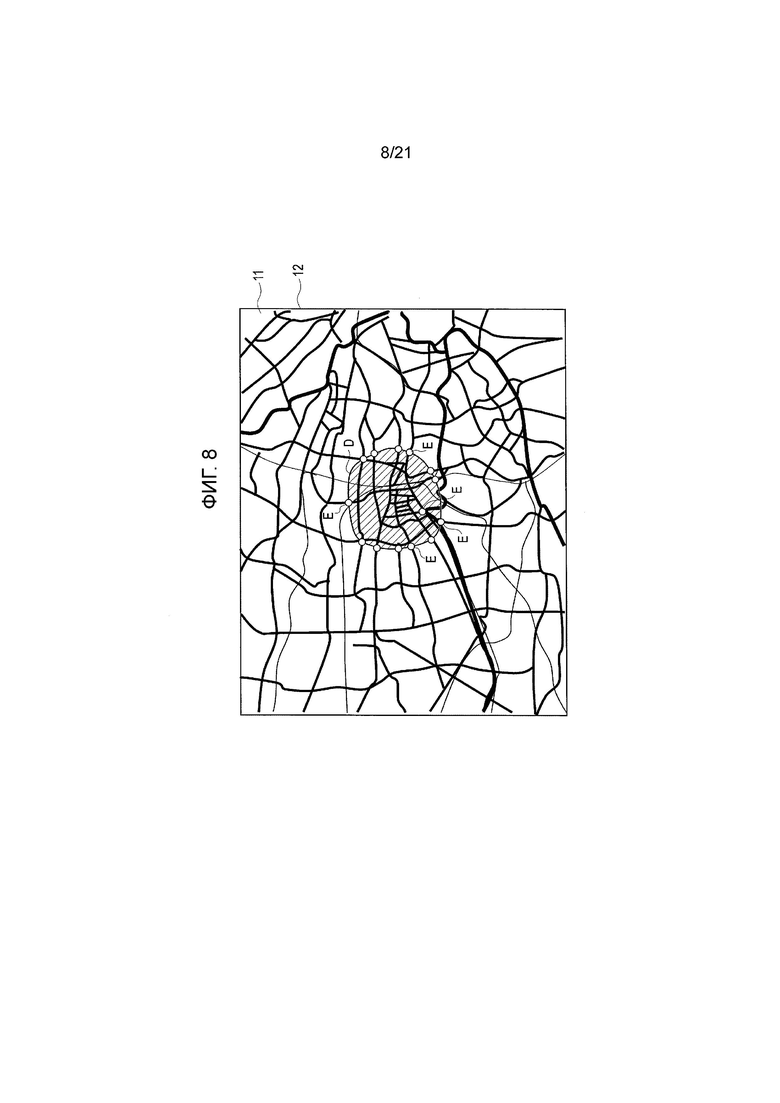
[0022] На этапе S103, как показано на фиг. 8 модуль 22 задания маршрутов выполняет поиск множества точек, в качестве предварительных пунктов E назначения, в которых граница пункта D назначения пересекается с предварительно определенными главными дорогами, например, согласно текущей позиции и условиям поиска маршрутов, включающим в себя пункт D назначения. Когда главные дороги, например, представляют собой платные дороги или объездные дороги, точки, в которых граница пункта D назначения пересекается с этими дорогами, не могут указываться как предварительные пункты E назначения, чтобы начинать выбор других маршрутов, и модуль 22 задания маршрутов может, следовательно, использовать развязки транспортных узлов, расположенных внутри области пункта D назначения, в качестве предварительных пунктов E назначения.
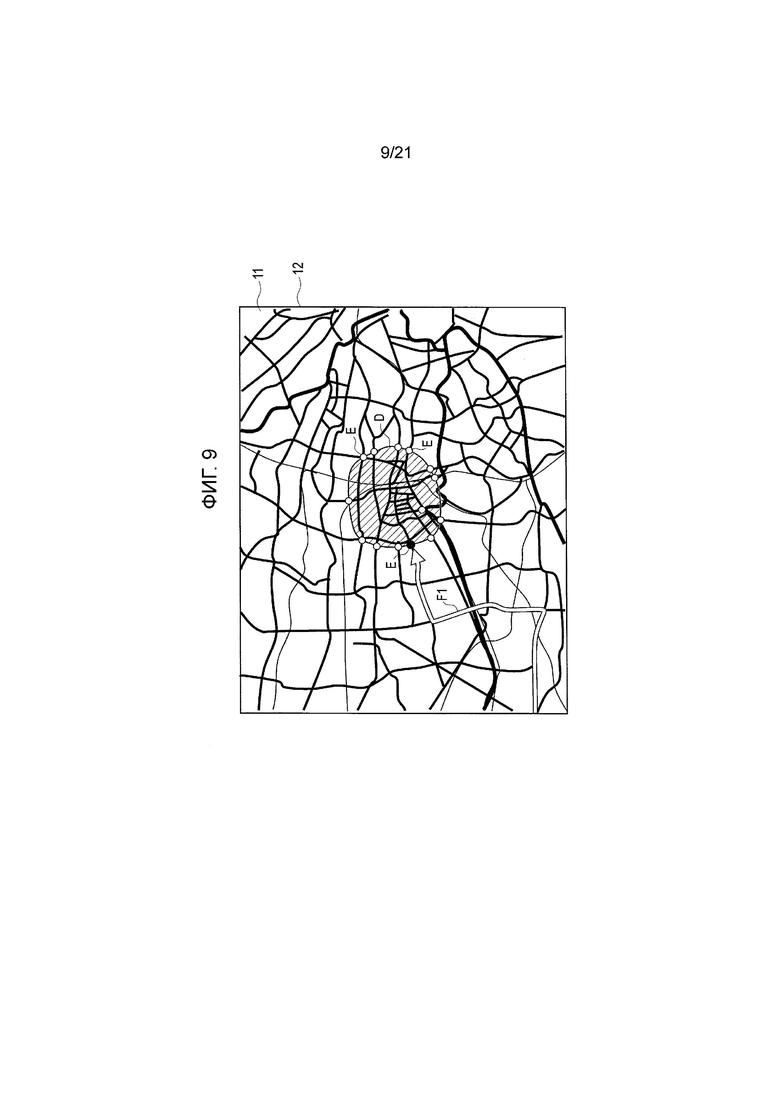
[0023] На этапе S104, модуль 22 задания маршрутов выбирает и определяет один предварительный пункт E назначения (указываемый посредством черной точки на фиг. 9) из искомых предварительных пунктов E назначения на основе условий поиска маршрутов. В частности, модуль 22 задания маршрутов определяет один предварительный пункт назначения на основе таких условий, как расстояния до соответствующих предварительных пунктов E назначения, времена прибытия, расход топлива, число правых/левых поворотов и присутствие или отсутствие платных участков.
[0024] Когда один предварительный пункт E назначения не может быть определен на этапе S104, модуль 22 задания маршрутов указывает, в качестве элементов, выбранных пользователем, условия для определения нескольких предварительных пунктов E назначения или одного предварительного пункта назначения через модуль 12 представления, на этапе S105. Модуль 22 задания маршрутов определяет один предварительный пункт E назначения на основе элемента, выбранного пользователем через модуль 11 ввода.
[0025] На этапе S106, модуль 22 задания маршрутов определяет маршрут F1 передвижения от текущей позиции до предварительного пункта E назначения, определенного на этапе S104 или этапе S105, как показано на фиг. 9.
[0026] На этапе S107, контроллер 2 управляет модулем 51 приведения в движение и модулем 52 рулевого управления таким образом, что автономное транспортное средство C едет по маршруту F1 передвижения, определенному на этапе S106. Автономное транспортное средство C управляется посредством контроллера 2 таким образом, чтобы начинать автономное передвижение, чтобы автономно ехать по маршруту F1 передвижения в определенный предварительный пункт E назначения.
[0027] На этапе S108 модуль 23 оценки задач оценивает предлагаемую задачу, предлагаемую пользователю, на основе информации задач, полученной из модуля 31 получения информации или модуля 4 хранения в ходе движения автономного транспортного средства C по маршруту F1 передвижения. Предлагаемая задача, предлагаемая посредством модуля 23 оценки задач, представляет собой задачу, выполняемую внутри области пункта D назначения после достижения предварительного пункта E назначения. Модуль 23 оценки задач может предлагать предлагаемую задачу пользователю на основе пользовательской информации, полученной посредством модуля 31 получения информации из сервера 6.
[0028] На этапе S109, модуль 23 оценки задач определяет то, оценивается или нет уникально предлагаемая задача. Модуль 23 оценки задач задает переход процесса к этапу S110, когда предлагаемая задача не оценивается уникально, и существуют другие варианты, и задает переход процесса к этапу S112, когда предлагаемая задача уникально оценивается.
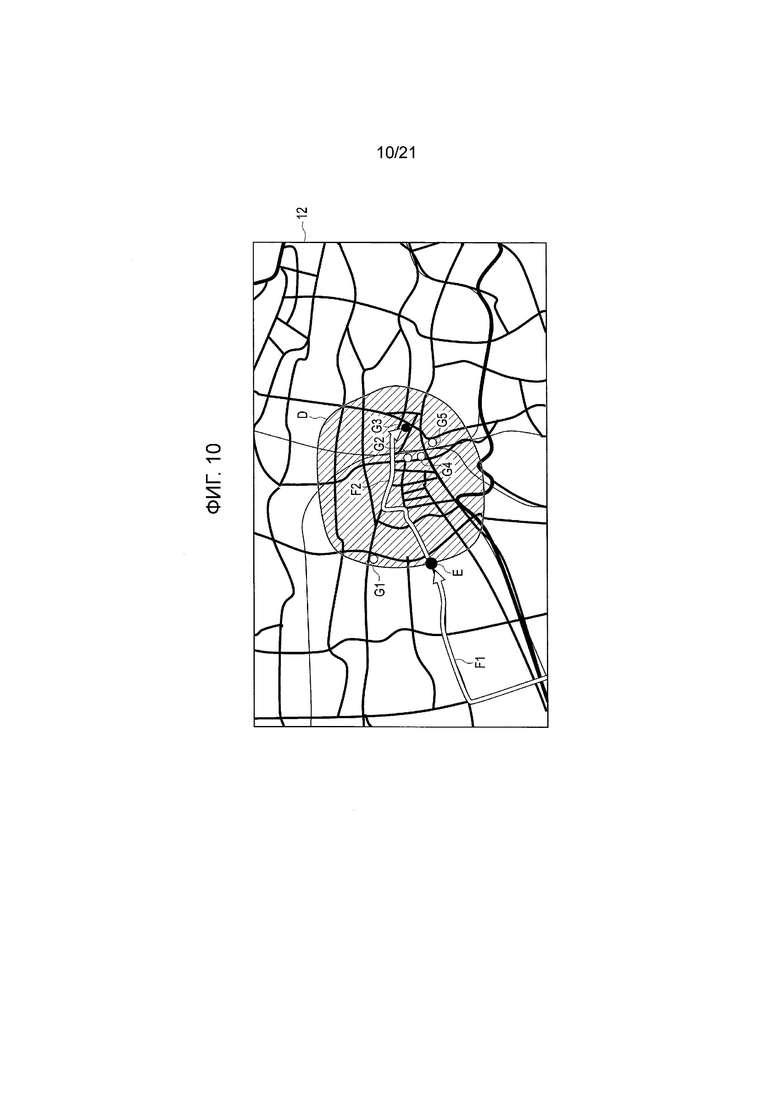
[0029] На этапе S110, модуль 12 представления указывает, в качестве элементов, выбранных пользователем, предлагаемые местоположения G1-G5, представляющие несколько предлагаемых задач, как показано на фиг. 10, в ходе движения автономного транспортного средства C по маршруту F1 передвижения. На этапе S111, модуль 23 оценки задач определяет то, выбирается или нет одна предлагаемая задача из предлагаемых задач, указываемых на этапе S110, согласно пользовательской операции, выполняемой в модуле 11 ввода. Процесс переходит к этапу S112, когда одна предлагаемая задача выбирается, и процесс переходит к этапу S113, когда одна предлагаемая задача не выбирается.
[0030] На этапе S112, модуль 22 задания маршрутов определяет то, определяется или нет конечный пункт назначения посредством этапов от S109 до S111, на которых задача уникально определяется посредством оценки модуля 23 оценки задач или выбора пользователя. Модуль 22 задания маршрутов задает переход процесса к этапу S114, когда конечный пункт назначения определяется, и задает переход процесса к этапу S118, когда конечный пункт назначения еще не определен.
[0031] На этапе S114, модуль 22 задания маршрутов определяет предлагаемое местоположение, представляющее уникально определенную предлагаемую задачу, в качестве конечного предлагаемого местоположения G3. На этапе S115, модуль 22 задания маршрутов определяет маршрут F2 передвижения от предварительного пункта E назначения, в котором маршрут F1 передвижения завершается, до конечного пункта G3 назначения, как показано на фиг. 10, согласно условиям поиска маршрутов.
[0032] На этапе S116, контроллер 2 управляет модулем 51 приведения в движение и модулем 52 рулевого управления таким образом, что автономное транспортное средство C едет по маршрутам F1 и F2 передвижения. Автономное транспортное средство C управляется посредством контроллера 2 таким образом, чтобы продолжать автономное передвижение, чтобы автономно ехать по маршрутам F1 и F2 передвижения, с тем чтобы достигать конечного пункта G3 назначения после достижения предварительного пункта E назначения в области пункта D назначения.
[0033] Когда автономное передвижение, начатое на этапе S107, продолжается в то время, когда одна предлагаемая задача не выбрана на этапе S111, модуль 22 задания маршрутов на этапе S113 определяет то, достигает или нет автономное транспортное средство C предварительного пункта E назначения. Процесс возвращается к этапу S108, когда автономное транспортное средство C еще не достигает предварительного пункта E назначения, и процесс переходит к этапу S117, когда автономное транспортное средство C достигает предварительного пункта E назначения.
[0034] На этапе S117, модуль 22 задания маршрутов добавляет предлагаемые задачи, в качестве предлагаемых местоположений G1-G5, оцененных на этапе S108, в список движения. На этапе S118, модуль 22 задания маршрутов определяет, в качестве маршрута F3 передвижения, продолжающегося из маршрута F1 передвижения, маршрут движения, последовательно проходящий через предлагаемые местоположения G1-G5 после достижения одного предварительного пункта E назначения в области пункта D назначения, как показано на фиг. 11.
[0035] На этапе S119, контроллер 2 управляет модулем 51 приведения в движение и модулем 52 рулевого управления таким образом, что автономное транспортное средство C едет по маршрутам F1 и F3 передвижения. Автономное транспортное средство C управляется посредством контроллера 2 таким образом, чтобы продолжать автономное передвижение, чтобы автономно ехать по маршрутам F1 и F3 передвижения, с тем чтобы последовательно достигать предлагаемых местоположений G1-G5 после достижения предварительного пункта E назначения в области пункта D назначения.
[0036] На этапе S120, модуль 22 задания маршрутов определяет то, расположено или нет автономное транспортное средство C в пределах предварительно определенного расстояния от соответствующих предлагаемых местоположений G1-G5, которые представляют собой точки, в которых выполняются предлагаемые задачи. Процесс возвращается к этапу S119, когда автономное транспортное средство C еще не находится в пределах предварительно определенного расстояния от соответствующих предлагаемых местоположений G1-G5, и процесс переходит к этапу S121, когда автономное транспортное средство C находится в пределах предварительно определенного расстояния от соответствующих предлагаемых местоположений G1-G5.
[0037] На этапе S121, модуль 13 уведомления уведомляет пользователя относительно приближения каждый раз, когда автономное транспортное средство C приближается к соответствующим предлагаемым местоположениям G1-G5. Одновременно с уведомлением посредством модуля 13 уведомления и наряду с информацией относительно соответствующих предлагаемых местоположений G1-G5, модуль 12 представления указывает элементы, выбранные пользователем, чтобы определять то, следует или нет задавать каждое приближающееся место, уведомленное посредством модуля 13 уведомления, в качестве конечного пункта назначения.
[0038] На этапе S122, модуль 22 задания маршрутов определяет то, выбирается или нет одно предлагаемое местоположение, из числа предлагаемых местоположений G1-G5, предоставленных на этапе S121, посредством пользовательской операции, выполняемой в модуле 11 ввода. Процесс переходит к этапу S114, когда одно предлагаемое местоположение выбирается, и процесс переходит к этапу S123, когда одно предлагаемое местоположение не выбирается. На этапе S123, автономное транспортное средство C управляется таким образом, чтобы двигаться в следующие достижимые предлагаемые местоположения G1-G5 по маршруту движения. Автономное транспортное средство C управляется посредством контроллера 2 таким образом, чтобы продолжать автономное передвижение, чтобы автономно ехать по маршруту F3 передвижения, который представляет собой маршрут движения, с тем чтобы последовательно достигать предлагаемых местоположений G1-G5.
[0039] Устройство 1 управления транспортного средства, включенное в автономное транспортное средство C согласно первому варианту осуществления настоящего изобретения, задает по участкам пункт D назначения, так что автономное передвижение может начинаться до того, как указывается конкретный пункт назначения. Поскольку устройство 1 управления транспортного средства автоматически предоставляет задачи, выполняемые в области пункта D назначения, автономное передвижение в конечный пункт назначения может продолжаться плавно.
[0040] Согласно устройству 1 управления транспортного средства, информация задач получается из модуля 4 хранения или модуля 31 получения информации, с тем чтобы предоставлять предлагаемые задачи, отражающие намерение или предпочтение пользователя, и запрашивать пользователя относительно необходимости принимать окончательное решение при меньшем числе этапов работы.
[0041] Согласно устройству 1 управления транспортного средства, пользовательская информация получается из сервера 6, с тем чтобы оценивать предлагаемые задачи на основе информации относительно посещаемых мест пользователя после выхода из автономного транспортного средства C и интереса пользователя.
[0042] Согласно устройству 1 управления транспортного средства, когда конечный пункт назначения может уникально определяться, автономное передвижение в конечный пункт назначения продолжается, с тем чтобы достигать конечного пункта назначения плавно при меньшем числе этапов работы.
[0043] Даже когда конечный пункт назначения не может уникально определяться, устройство 1 управления транспортного средства автоматически формирует маршрут движения, по которому движется автономное транспортное средство C через предлагаемые местоположения, с тем чтобы плавно продолжать автономное передвижение без использования вождения вручную.
[0044] Согласно устройству 1 управления транспортного средства, даже когда пользователь не выбирает предлагаемые местоположения, автономное передвижение может продолжаться плавно посредством автономного прохождения маршрута движения без использования вождения вручную.
[0045] Согласно устройству 1 управления транспортного средства, пользователь уведомляется относительно приближения к предлагаемым местоположениям наряду с информацией относительно предлагаемых местоположений при прохождении маршрута движения, с тем чтобы точно отражать намерение пользователя.
[0046] Второй вариант осуществления
Устройство 1A управления транспортного средства, включенное в автономное транспортное средство C согласно второму варианту осуществления настоящего изобретения, отличается от устройства 1A управления транспортного средства согласно первому варианту осуществления применимостью к случаю на автомобильных парковках в местах для отдыха, торговых центрах и т.п. Другие конфигурации, операции и преимущества во втором варианте осуществления являются практически идентичными конфигурациям, операциям и преимуществам в первом варианте осуществления, и перекрывающиеся описания не повторяются ниже.
[0047] Как показано на фиг. 12, устройство 1A управления транспортного средства включает в себя контроллер 2A, включающий в себя, в дополнение к модулю 21 задания пунктов назначения, модулю 22 задания маршрутов и модулю 23 оценки задач, модуль 24 обнаружения парковочных рамок для обнаружения парковочных рамок и парковочный контроллер для управления автономным транспортным средством C таким образом, чтобы парковаться в обнаруженной парковочной рамке.
[0048] Модуль 24 обнаружения парковочных рамок обнаруживает парковочную рамку, расположенную около автономного транспортного средства C на автомобильной парковке, так что автономное транспортное средство C может парковаться. Модуль 24 обнаружения парковочных рамок обнаруживает доступную парковочную рамку при одновременном обнаружении других транспортных средств, помех и других парковочных рамок посредством обработки изображений, снимаемых, например, посредством модуля 32 датчиков, служащего в качестве камеры. Парковочный контроллер 25 управляет автономным транспортным средством C таким образом, чтобы парковаться в доступной парковочной рамке, обнаруженной посредством модуля 24 обнаружения парковочных рамок, при одновременном обнаружении других транспортных средств, помех и других парковочных рамок посредством обработки изображений, снимаемых посредством модуля 32 датчиков.
[0049] Как показано на фиг. 13, модуль 12 представления предоставляет пользователю предварительно определенные секции, указываемые посредством элементов, выбранных пользователем на схеме размещения автомобильной парковки, согласно картографическим данным, полученным из модуля 4 хранения или модуля 31 получения информации. Как показано в примере по фиг. 13, модуль 12 представления указывает первую-четвертую области парковки в качестве секций парковки, указываемых посредством элементов H1-H4, отображаемых на экране, показывающем схему размещения автомобильной парковки.
[0050] Как показано на фиг. 14, например, модуль 21 задания пунктов назначения задает четвертую область парковки в качестве пункта D назначения согласно пользовательской операции, выполняемой в модуле 11 ввода. Модуль 22 задания маршрутов размещает предварительные пункты E назначения в точках, в которых граница области пункта D назначения пересекается с проездами, через которые транспортные средства проезжают на автомобильной парковке. Например, модуль 22 задания маршрутов получает информацию часового пояса или условий парковки на автомобильной парковке из модуля 31 получения информации и автоматически выбирает маршрут F4 передвижения с более низкой вероятностью переполнения из маршрутов F4 и F5 передвижения, которые представляют собой маршруты в несколько предварительных пунктов E назначения.
[0051] Например, когда автономное транспортное средство C движется по маршруту F4 передвижения, модуль 12 представления указывает элементы H5-H7, выбранные пользователем для определения того, где паркуется автономное транспортное средство C, на стороне ресторана, на стороне магазина или на стороне туалета, посредством обращения к схеме размещения, показанной на фиг. 15. Ресторан, магазин и туалет совмещаются в этом порядке от въезда до выезда автомобильной парковки.
[0052] Когда пользователь не выбирает элементы H5-H7, модуль 22 задания маршрутов может выбирать самый длинный проезд на автомобильной парковке в качестве маршрута передвижения. Модуль 24 обнаружения парковочных рамок обнаруживает доступную парковочную рамку при прохождении маршрута передвижения. Модуль 12 представления указывает элемент, управляемый пользователем, для определения то, следует или нет парковаться в парковочной рамке, обнаруженной посредством модуля 24 обнаружения парковочных рамок. Модуль 22 задания маршрутов изменяет маршрут передвижения согласно определению пользователя относительно необходимости парковаться в парковочной рамке. Парковочный контроллер 25 затем управляет автономным транспортным средством C таким образом, чтобы парковаться в обнаруженной парковочной рамке.
[0053] Например, когда автономное транспортное средство C расположено в позиции C1, как показано на фиг. 16, модуль 12 представления предоставляет пользователю шесть элементов, указываемых посредством стрелок A1-А6, как показано на фиг. 17. Стрелки A1-А6 обозначают левый поворот, движение вперед, правый поворот, парковку в левой парковочной рамке, остановку и парковку в правой парковочной рамке. В примере, показанном на фиг. 17, стрелка A2, полностью заштрихованная, обозначает то, что автономное транспортное средство C, расположенное в позиции C1, выполняет движение вперед на следующей развязке.
[0054] Когда автономное транспортное средство C расположено в позиции C2, модуль 12 представления указывает стрелку A3, обозначающую то, что правый поворот выполняется на следующей развязке, как показано на фиг. 18. Правый поворот автоматически определяется посредством модуля 22 задания маршрутов, например, согласно информации часового пояса или условиям парковки на автомобильной парковке. Правые/левые повороты или движение вперед могут выполняться в зависимости от пользовательской операции, выполняемой для элементов, соответствующих стрелкам A1-А6, отображаемым в модуле 11 ввода.
[0055] Модуль 24 обнаружения парковочных рамок обнаруживает доступную парковочную рамку J справа от автономного транспортного средства C, когда автономное транспортное средство C расположено в позиции C3. Модуль 12 представления указывает стрелку A6 с заштрихованным только периферийным краем, как показано на фиг. 19, с тем чтобы отличать ее от стрелки A2, обозначающей действие, которое должно выполняться. Указатель стрелки A6 обозначает то, что парковочный контроллер 25 управляет автономным транспортным средством C таким образом, чтобы парковаться в парковочной рамке J, обнаруженной слева от автономного транспортного средства C, когда управляется элемент, отображаемый в модуле 11 ввода, соответствующем стрелке A6.
[0056] Автономное транспортное средство C, когда находится в позиции C4, обнаруживает пересекающийся проезд посредством обращения к схеме размещения автомобильной парковки, с тем чтобы автоматически останавливаться на пересечении. Модуль 12 представления затем указывает стрелку A2, обозначающую следующее движение вперед, как показано на фиг. 20.
[0057] Когда автономное транспортное средство C расположено в позиции C5, модуль 24 обнаружения парковочных рамок обнаруживает доступную парковочную рамку в поле K зрения спереди слева от модуля 32 датчиков. Модуль 12 представления затем указывает стрелку A4, обозначающую то, что автономное транспортное средство C паркуется в следующей обнаруженной доступной парковочной рамке слева.
[0058] Парковочный контроллер 25 управляет модулем 51 приведения в движение и модулем 52 рулевого управления в то время, когда модуль 32 датчиков обнаруживает другие транспортные средства, помехи и другие парковочные рамки, с тем чтобы парковать автономное транспортное средство C в доступной парковочной рамке, обнаруженной посредством модуля 24 обнаружения парковочных рамок. Автономное транспортное средство C управляется посредством парковочного контроллера 25 таким образом, чтобы безопасно автономно парковаться в доступной парковочной рамке в позиции C6.
[0059] Когда доступная парковочная рамка не может обнаруживаться в предлагаемом местоположении, модуль 22 задания маршрутов может задавать маршрут движения на автомобильной парковке, или модуль 12 представления может снова отображать первую-четвертую области парковки в качестве предложенных пунктов назначения.
[0060] Как показано на фиг. 22, когда пользователь находит парковочную рамку, из которой выезжает другое транспортное средство, спереди справа от автономного транспортного средства C за пределами области пункта назначения, автономное транспортное средство C может парковаться в найденной парковочной рамке посредством пользовательской операции. Модуль 11 ввода вводит команду для того, чтобы останавливать автономное транспортное средство C, в контроллер 2 посредством пользовательской операции, выполняемой для элемента, соответствующего стрелке A5, указываемой в модуле 11 ввода, как показано на фиг. 23. Контроллер 2 управляет автономным транспортным средством C таким образом, чтобы останавливаться согласно пользовательской операции.
[0061] После того, как другое транспортное средство выходит из парковочной рамки, модуль 24 обнаружения парковочных рамок обнаруживает парковочную рамку, из которой выходит другое транспортное средство, в качестве доступной парковочной рамки. Модуль 11 ввода затем вводит команду для того, чтобы парковаться в парковочной рамке слева, в контроллер 2 посредством пользовательской операции, выполняемой для элемента, соответствующего стрелке A6, указываемой в модуле 11 ввода, как показано на фиг. 24. Парковочный контроллер 25 управляет автономным транспортным средством C таким образом, чтобы парковаться в доступной парковочной рамке согласно пользовательской операции.
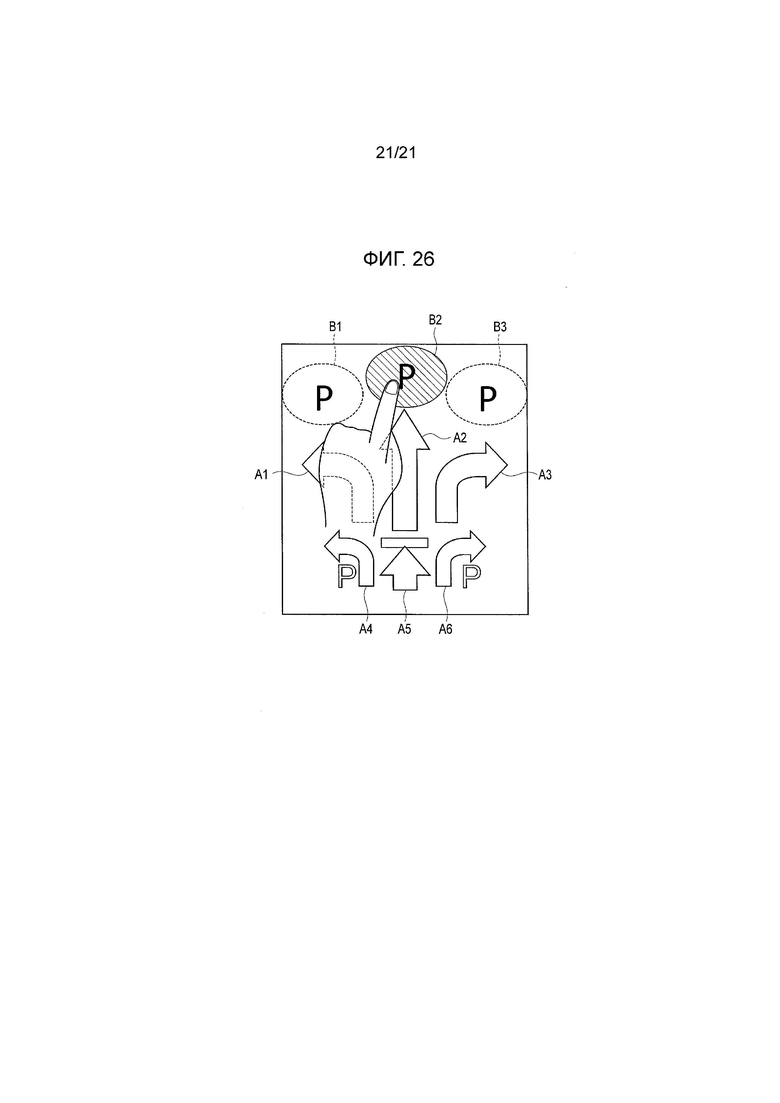
[0062] Когда схема размещения автомобильной парковки не может получаться, модуль 21 задания пунктов назначения может определять, в качестве пунктов назначения, секции, заданные в зависимости от направлений вперед, вправо и влево и расстояний на основе позиции автономного транспортного средства C, как показано на фиг. 25. Модуль 12 представления предоставляет пользователю участки B1-B3, как показано на фиг. 26, в качестве секций, заданных в зависимости от направлений вперед, вправо и влево и расстояний. Модуль 21 задания пунктов назначения определяет участок B2, выбранный посредством пользовательской операции, в качестве пункта D2 назначения (см. фиг. 25). Модуль 22 задания маршрутов последовательно формирует маршруты передвижения в пункт D2 назначения согласно информации окружения, обнаруженной посредством модуля 32 датчиков.
[0063] Устройство 1A управления транспортного средства, включенное в автономное транспортное средство C согласно второму варианту осуществления настоящего изобретения, задает по участкам пункт D назначения, так что автономное передвижение может начинаться до того, как указывается конкретный пункт назначения. Поскольку устройство 1A управления транспортного средства автоматически предоставляет задачи, выполняемые в области пункта D назначения, автономное передвижение в конечный пункт назначения может продолжаться плавно.
[0064] Согласно устройству 1A управления транспортного средства, необязательный участок на автомобильной парковке определяется в качестве пункта назначения, так что автономное транспортное средство C может двигаться таким образом, чтобы парковаться в области парковки, не обнаруженной из текущей позиции. Когда пункт назначения определяется посредством пользовательской операции, устройство 1A управления транспортного средства может парковать автономное транспортное средство C без использования системы для управления поиском незанятых мест на автомобильной парковке.
[0065] Согласно устройству 1A управления транспортного средства, функциональное управление может прерываться при прохождении определенного маршрута передвижения, с тем чтобы сразу парковать автономное транспортное средство C в необязательной парковочной рамке на переполненной автомобильной парковке.
[0066] Согласно устройству 1A управления транспортного средства, периферия целевого места или обычно доступной зоны парковки может выбираться в зависимости от намерения пользователя посредством обращения к схеме размещения автомобильной парковки или места.
[0067] Устройство 1A управления транспортного средства может обращаться к информации относительно частных автомобильных парковок или автомобильных парковок в новых местах посредством внешнего получения их схем размещения, с тем чтобы более точно отражать намерение пользователя.
[0068] Согласно устройству 1A управления транспортного средства, даже когда пользователь не указывает пункт назначения, автономное транспортное средство C автономно движется по самому длинному маршруту передвижения, с тем чтобы повышать вероятность нахождения места для парковки на автомобильной парковке.
[0069] Согласно устройству 1A управления транспортного средства, даже когда схема размещения не может получаться, пункт назначения задается в качестве примерно определенной области, и автономное транспортное средство C автономно движется по маршруту в него, с тем чтобы автономно парковаться в месте для парковки, при поддержании автономного передвижения.
[0070] Другие варианты осуществления
Хотя настоящее изобретение описано выше в отношении вариантов осуществления, настоящее изобретение не имеет намерение быть ограниченным формулировками и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и практические технологии должны становиться очевидными для специалистов в данной области техники из этого раскрытия сущности.
Например, в вариантах осуществления, описанных выше, модуль 11 ввода может представлять собой устройство речевого ввода, которое принимает пользовательские операции посредством речи.
[0071] Конечно, настоящее изобретение включает в себя различные варианты осуществления, не описанные в этом описании, к примеру, конфигурации, включающие в себя взаимно применяемые первый и второй варианты осуществления. Следовательно, объем настоящего изобретения задается только посредством надлежащих признаков согласно формуле изобретения с учетом пояснений, приведенных выше.
[0072] Содержимое заявки на патент (Япония) № P2014-048570 (поданной 12 марта 2014 года) полностью содержится по ссылке в данном документе.
Промышленная применимость
[0073] Согласно настоящему изобретению, может предоставляться устройство управления транспортного средства, допускающее начало автономного передвижения перед указанием конкретного пункта назначения посредством задания по участкам пункта назначения, и допускающее плавное продолжение автономного передвижения в конечный пункт назначения посредством предоставления задач, выполняемых в области пункта назначения.
Список номеров ссылок
[0074] C - автономное транспортное средство
D - пункт назначения
E - предварительный пункт назначения
F - маршрут передвижения
1, 1A - устройство управления транспортного средства
12 - модуль представления
13 - модуль уведомления
21 - модуль задания пунктов назначения
22 - модуль задания маршрутов
23 - модуль оценки задач
24 - модуль обнаружения парковочных рамок
25 - парковочный контроллер
31 - модуль получения информации
32 - модуль датчиков




Изобретение относится к области навигационного приборостроения и может быть использовано в системах навигации подвижных транспортных средств. Технический результат – расширение функциональных возможностей. Для этого устройство управления транспортным средством (C), автономно управляемым с возможностью передвигаться по определенному маршруту передвижения, включает в себя: модуль 21 задания пунктов назначения, выполненный с возможностью задавать пункт D назначения в качестве глобальной области для определения маршрута передвижения; модуль 22 задания маршрутов, выполненный с возможностью распределять предварительный пункт (E) назначения на границе области пункта назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт (D) назначения, с тем чтобы определять маршрут (F) передвижения, проходящий через предварительный пункт (E) назначения; и модуль 12 представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (C) движется по маршруту передвижения в предварительный пункт (E) назначения, так что задача выполняется в области пункта (D) назначения после достижения предварительного пункта (E) назначения. 4 н. и 13 з.п. ф-лы, 26 ил.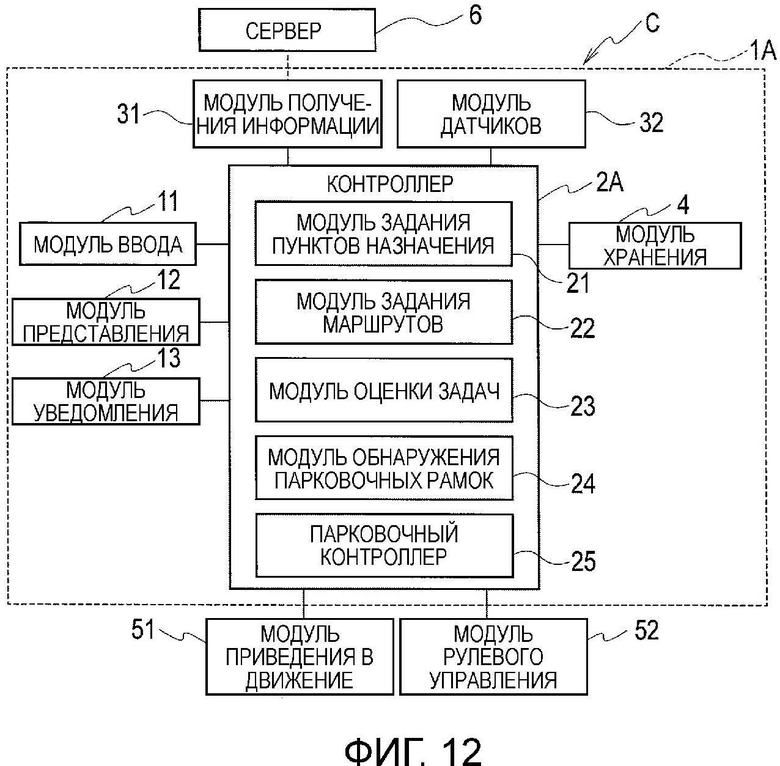
1. Устройство управления транспортного средства, используемое в автономном транспортном средстве (С), автономно управляемом с возможностью ехать по определенному маршруту передвижения, причем устройство управления транспортного средства содержит:
- модуль (21) задания пунктов назначения, выполненный с возможностью задавать пункт (D) назначения в качестве глобальной области для определения маршрута передвижения;
- модуль (22) задания маршрутов, выполненный с возможностью распределять предварительный пункт (E) назначения на границе области пункта (D) назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт (D) назначения, с тем чтобы определять маршрут передвижения, проходящий через предварительный пункт (E) назначения; и
- модуль (12) представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (С) движется по маршруту передвижения в предварительный пункт (E) назначения, так что задача выполняется в области пункта (D) назначения после достижения предварительного пункта (E) назначения.
2. Устройство управления транспортного средства по п. 1, в котором модуль (12) представления указывает элемент, управляемый пользователем, обозначающий задачу для определения конечного пункта назначения, выполняемую в области пункта (D) назначения после достижения предварительного пункта (E) назначения.
3. Устройство управления транспортного средства по п. 1 или 2, дополнительно содержащее модуль (23) оценки задач, выполненный с возможностью оценивать задачу, предлагаемую пользователю, согласно по меньшей мере одному из предыстории задач, выбранных пользователем, часовому поясу, в котором выполняется задача, предыстории движения в пункт (D) назначения и информации места в области пункта (D) назначения,
- при этом модуль (12) представления указывает элемент, управляемый пользователем, обозначающий задачу, оцененную посредством модуля (23) оценки задач.
4. Устройство управления транспортного средства по п. 1 или 2, дополнительно содержащее:
- модуль (31) получения информации, выполненный с возможностью получать пользовательскую информацию через сеть из сервера, который хранит пользовательскую информацию, включающую в себя по меньшей мере одно из регистрационной информации пользователя, предыстории отправок данных и предыстории действий; и
- модуль (23) оценки задач, выполненный с возможностью оценивать задачу, предлагаемую пользователю, согласно пользовательской информации, полученной посредством модуля (31) получения информации,
- при этом модуль (12) представления указывает элемент, управляемый пользователем, обозначающий задачу, оцененную посредством модуля (23) оценки задач.
5. Устройство управления транспортного средства по п. 3, в котором, когда задача уникально оценивается, модуль (22) задания маршрутов определяет маршрут передвижения таким образом, что задача выполняется после достижения области пункта (D) назначения.
6. Устройство управления транспортного средства по п. 3, в котором, когда задача не оценивается уникально и имеются другие задачи, модуль (22) задания маршрутов определяет маршрут движения в качестве маршрута передвижения, по которому задачи последовательно выполняются после достижения области пункта (D) назначения.
7. Устройство управления транспортного средства по любому из пп. 1 или 2, в котором, когда пользователь не выбирает задачу, модуль (22) задания маршрутов определяет маршрут движения в качестве маршрута передвижения, по которому задачи последовательно выполняются после достижения области пункта (D) назначения.
8. Устройство управления транспортного средства по п. 6, дополнительно содержащее модуль (13) уведомления, выполненный с возможностью уведомлять пользователя относительно приближения к местам, в которых выполняются задачи в то время, когда автономное транспортное средство (С) едет по маршруту передвижения,
- при этом модуль (12) представления предоставляет пользователю каждую задачу, указываемую посредством элемента, управляемого пользователем каждый раз, когда модуль (13) уведомления уведомляет пользователя относительно приближения к месту, в котором выполняется задача.
9. Устройство управления транспортного средства, используемое в автономном транспортном средстве (С), автономно управляемом с возможностью ехать по определенному маршруту передвижения, причем устройство управления транспортного средства содержит:
- модуль (21) задания пунктов назначения, выполненный с возможностью задавать пункт (D) назначения для определения маршрута передвижения в необязательную область на автомобильной парковке;
- модуль (22) задания маршрутов, выполненный с возможностью определять маршрут передвижения в область пункта (D) назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт (D) назначения; и
- парковочный контроллер, выполненный с возможностью управлять автономным транспортным средством (С) таким образом, чтобы парковаться в области пункта (D) назначения.
10. Устройство управления транспортного средства по п. 9, дополнительно содержащее модуль (24) обнаружения парковочных рамок, выполненный с возможностью обнаруживать доступную парковочную рамку, расположенную около автономного транспортного средства (С), так что автономное транспортное средство (С) может парковаться в ней,
- при этом модуль (24) обнаружения парковочных рамок обнаруживает доступную парковочную рамку после достижения области пункта (D) назначения, и
- парковочный контроллер управляет автономным транспортным средством (С) таким образом, чтобы парковаться в доступной парковочной рамке в области пункта (D) назначения.
11. Устройство управления транспортного средства по п. 10, дополнительно содержащее модуль (12) представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (С) движется по маршруту передвижения в область пункта (D) назначения, так что задача выполняется в области пункта назначения после достижения области пункта (D) назначения,
- при этом модуль (24) обнаружения парковочных рамок обнаруживает доступную парковочную рамку около автономного транспортного средства (С) в то время, когда автономное транспортное средство (С) движется в пункт (D) назначения на автомобильной парковке,
- модуль (12) представления предоставляет пользователю элемент, управляемый, когда пользователь определяет то, следует или нет парковать автономное транспортное средство (С) в доступной парковочной рамке за пределами области пункта (D) назначения,
- модуль (22) задания маршрутов изменяет маршрут передвижения, когда пользователь управляет элементом, обозначающим то, что автономное транспортное средство (С) паркуется в доступной парковочной рамке, и
- парковочный контроллер управляет автономным транспортным средством (С) таким образом, чтобы парковаться в доступной парковочной рамке за пределами области пункта (D) назначения.
12. Устройство управления транспортного средства по п. 10, дополнительно содержащее модуль (12) представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (С) движется по маршруту передвижения в область пункта (D) назначения, так что задача выполняется в области пункта назначения после достижения области пункта (D) назначения,
- при этом модуль (12) представления предоставляет пользователю секцию, указываемую посредством элемента, управляемого пользователем, и предварительно показанную на схеме размещения автомобильной парковки, и
- модуль (21) задания пунктов назначения задает элемент, управляемый пользователем, в качестве пункта (D) назначения.
13. Устройство управления транспортного средства по п. 12, в котором схема размещения получается извне через связь.
14. Устройство управления транспортного средства по п. 10, дополнительно содержащее модуль (12) представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (С) движется по маршруту передвижения в область пункта (D) назначения, так что задача выполняется в области пункта (D) назначения после достижения области пункта (D) назначения,
- при этом модуль (22) задания маршрутов определяет, в качестве маршрута передвижения, маршрут самого длинного проезда на автомобильной парковке, когда пользователь не выбирает элемент,
- модуль (24) обнаружения парковочных рамок обнаруживает доступную парковочную рамку около автономного транспортного средства (С) в то время, когда автономное транспортное средство (С) движется по проезду на автомобильной парковке,
- модуль (12) представления предоставляет пользователю элемент, управляемый, когда пользователь определяет то, следует или нет парковать автономное транспортное средство (С) в доступной парковочной рамке,
- модуль (22) задания маршрутов изменяет маршрут передвижения, когда пользователь управляет элементом, обозначающим то, что автономное транспортное средство (С) паркуется в доступной парковочной рамке, и
- парковочный контроллер управляет автономным транспортным средством (С) таким образом, чтобы парковаться в доступной парковочной рамке за пределами области пункта (D) назначения.
15. Устройство управления транспортного средства по п. 10, дополнительно содержащее:
- модуль (12) представления, выполненный с возможностью предоставлять пользователю задачу, указываемую посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство (С) движется по маршруту передвижения в область пункта (D) назначения, так что задача выполняется в области пункта (D) назначения после достижения области пункта (D) назначения; и
- модуль (32) датчиков, выполненный с возможностью обнаруживать информацию окружения автономного транспортного средства (С),
- при этом модуль (12) представления указывает участок, управляемый пользователем, в качестве секции, заданной в зависимости от направлений вперед, вправо и влево и расстояний на основе позиции автономного транспортного средства (С),
- модуль (21) задания пунктов назначения определяет участок, управляемый пользователем, в качестве пункта (D) назначения, и
- модуль (22) задания маршрутов последовательно формирует маршруты передвижения согласно информации окружения, обнаруженной посредством модуля (32) датчиков.
16. Способ управления транспортным средством для автономного транспортного средства, автономно управляемого с возможностью ехать по определенному маршруту передвижения, причем способ управления транспортным средством содержит этапы:
- задания пунктов назначения в качестве глобальной области для определения маршрута передвижения;
- распределения предварительного пункта назначения на границе области пункта назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт назначения, с тем чтобы определять маршрут передвижения, проходящий через предварительный пункт назначения; и
- предоставления пользователю задачи, указываемой посредством элемента, управляемого пользователем в то время, когда автономное транспортное средство движется по маршруту передвижения в предварительный пункт назначения, так что задача выполняется в области пункта назначения после достижения предварительного пункта назначения.
17. Способ управления транспортным средством для автономного транспортного средства, автономно управляемого с возможностью ехать по определенному маршруту передвижения, причем способ управления транспортным средством содержит этапы:
- задания пункта назначения для определения маршрута передвижения в необязательную область на автомобильной парковке;
- определения маршрута передвижения в область пункта назначения согласно условиям поиска маршрутов, включающим в себя текущую позицию и пункт назначения; и
- управления автономным транспортным средством таким образом, чтобы парковаться в области пункта назначения.
| WO 2013100902 A1, 04.07.2013 | |||
| DE102012216215 A1, 14.03.2013 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 5054719 А1, 08.10.1991. | |||

