Изобретение относится к машиностроению, преимущественно к космической технике.
Известен спиральный пружинный механизм (ПМ) двухстороннего действия (аналог), описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с., в котором вращению входного вала в каждом из двух направлений противодействуют две спиральные пружинные ленты (ПЛ), каждая из которых имеет постоянную ширину и толщину, ограничение хода каждой из двух пружин обеспечивается набором кулачковых шайб.
Известен ПМ одностороннего действия (аналог), описанный в книге B.C. Сыромятников. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984. - 216 с., в котором вращению входного вала в одном направлении противодействует спиральная ПЛ постоянной ширины и толщины, ограничение хода которой обеспечивается набором кулачковых шайб.
Известен спиральный пружинный механизм (ПМ) с неподвижным барабаном (прототип), описанный в книге Т.А. Гевондян. Пружинные двигатели. - М.: Государственное издательство оборонной промышленности, 1956. - 368 с, состоящий из вала, развязанного с ним барабана и пружинной ленты постоянной ширины, одним концом закрепленной на валу, а вторым на барабане ПМ, в котором вращению входного вала в сторону взведения спирального пружинного механизма противодействует упруго деформируемая пружинная лента постоянной толщины и ширины, которая после снятия с входного вала нагрузки, стремится вращать входной вал в противоположную его взведению сторону.
Особенностью конструкции всех ПМ со спиральной ПЛ является постоянный и незначительный наклон характеристики жесткости, обусловленный физическими свойствами и постоянной шириной ленты. Эта особенность является достоинством, если такие ПМ работают как пружинные двигатели в часовых механизмах различного назначения, для которых желателен приводной момент по возможности наиболее близкий к постоянному.
При использовании в стыковочных механизмах (СтМ) данная особенность ПМ со спиральной ПЛ является недостатком, ограничивающим его применение, так как для обеспечения требуемой энергоемкости необходимо повышать его начальный момент сопротивления (в начале рабочего хода). Это уменьшает податливость СтМ в начальный момент стыковки, ухудшает условия сцепки, для достижения которой приходится увеличивать скорость сближения или включать реактивные двигатели космического аппарата, создающие дополнительную силу, преодолевающую сопротивление СтМ.
Техническим результатом предлагаемого изобретения является изменение наклона на начальном участке характеристики жесткости спирального пружинного механизма, позволяющее варьировать момент его сопротивления в более широком диапазоне.
Технический результат достигается тем, что в спиральном пружинном механизме, состоящем из входного вала, пружинной ленты и развязанного с входным валом неподвижного барабана, в отличие от известного, пружинная лента длиной L выполнена с участком постоянной ширины b, и с участком в форме трапеции высоты L1, и основаниями шириной b, переходящим в ленту постоянной ширины, и шириной bн<b, при этом один конец пружины с участком постоянной ширины b прикреплен к барабану, а другой конец пружины шириной bн закреплен на валу спирального пружинного механизма.
Предлагаемая конструкция, в которой вместо пружинной ленты постоянной ширины используется пружинная лента с участком переменной ширины, обладает способностью исключения из процесса деформации начальных зауженных витков пружинной ленты ввиду их намотки на рабочий вал при взведении спирального пружинного механизма, что позволяет реализовывать увеличенную или уменьшенную жесткость спирального пружинного механизма на начальном участке его рабочей характеристики.
Суть изобретения поясняется графическими материалами, на которых приведены:
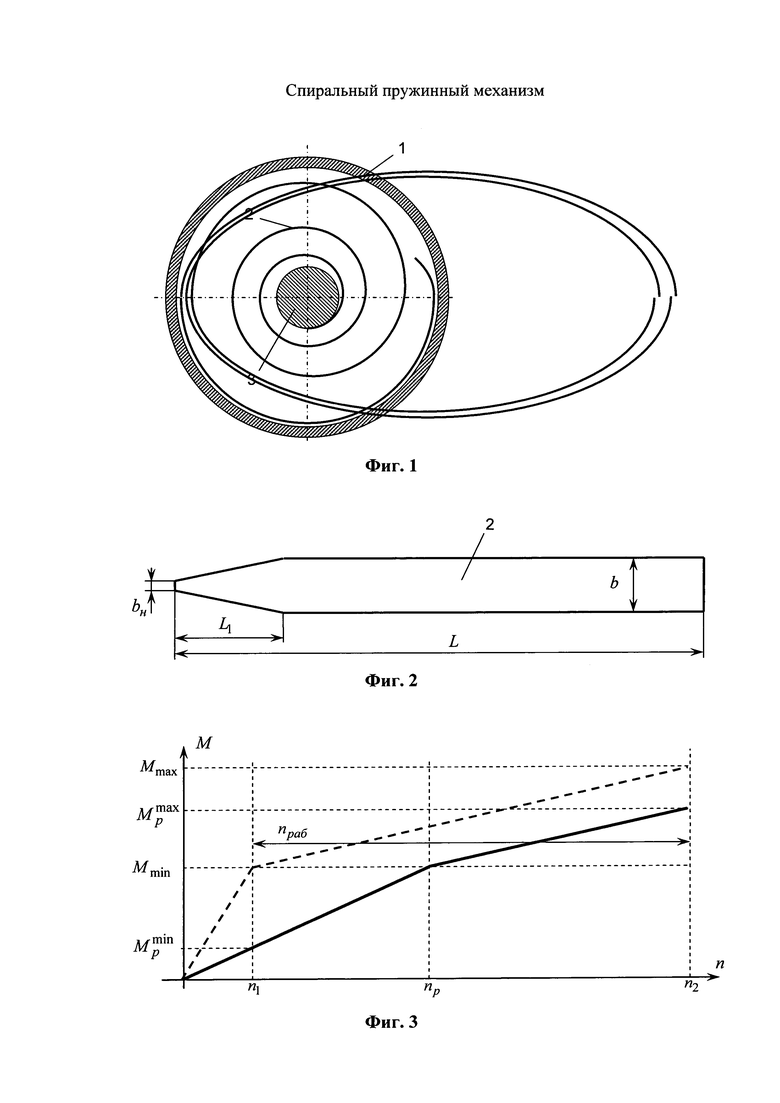
На фиг. 1 - схема спирального пружинного механизма;
На фиг. 2 - форма пружинной ленты с переменной шириной;
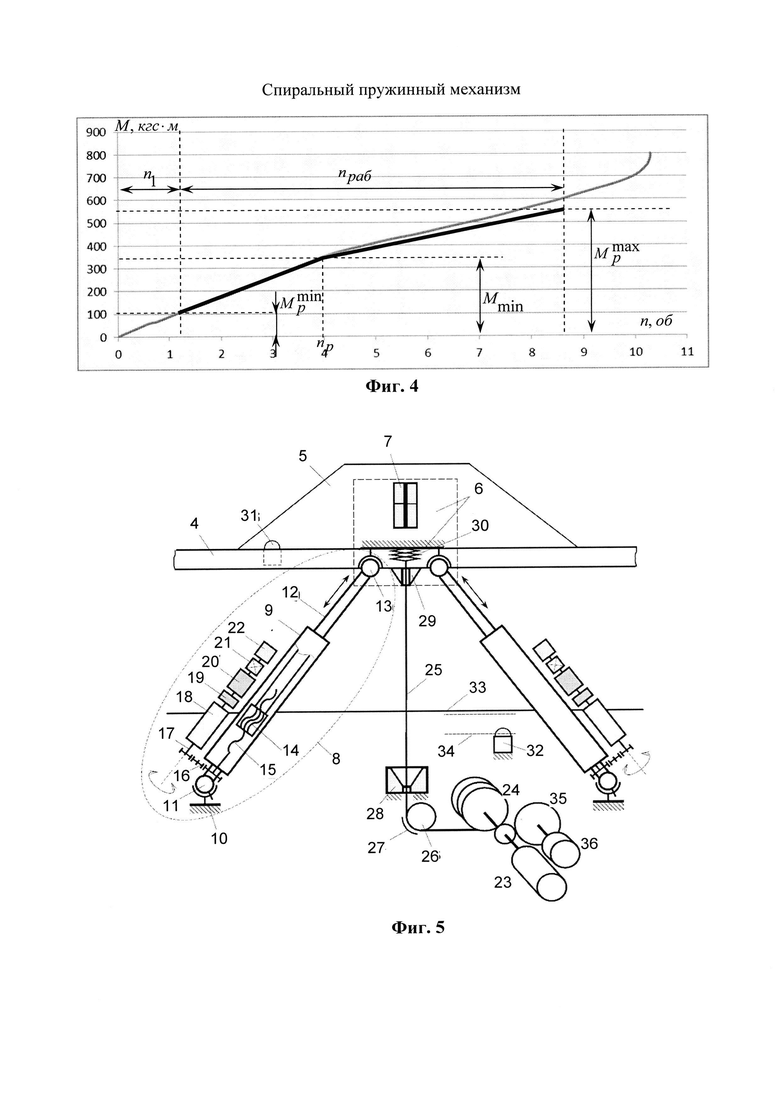
На фиг. 3 - характеристика жесткости, реализуемая спиральным пружинным механизмом;
На фиг. 4 - представлен пример результата расчета характеристики жесткости спирального пружинного механизма с пружинной лентой переменной ширины, наложенной на результаты математического моделирования без учета трения. Погрешность не превышает 10%.
На фиг. 5 - схема периферийного стыковочного механизма космического аппарата, в котором используется спиральный пружинный механизм.
Спиральный пружинный механизм, представленный на фиг. 1, состоит из входного вала 1, пружинной ленты 2 и развязанного с входным валом неподвижного и соосного барабана 3… пружинная лента выполнена с участком постоянной ширины b, и с участком в форме трапеции высоты L1, и основаниями шириной b, переходящими в ленту постоянной ширины, и шириной bH меньше b на заданную величину Δb, при этом один конец пружины с участком постоянной ширины b прикреплен к барабану, а другой конец пружины шириной bн закреплен на валу спирального пружинного механизма.
Заданная величина Δb=b-bн может быть выбрана из диапазона 0<Δb<b. Если Δb=0, то трапециевидный участок вырождается в прямой. Если Δb=b, то трапециевидный участок вырождается в треугольный участок.
Спиральный пружинный механизм реализует характеристику жесткости, представляющую собой два линейных участка с разными жесткостями с перегибом при числе оборотов входного вала равном nр. Первый участок имеет минимальный момент равный  в точке начала рабочей характеристики n1 и растущий до момента Mmin в точке перегиба nр. Второй участок имеет минимальный момент Mmin в точке перегиба nр и растущий до
в точке начала рабочей характеристики n1 и растущий до момента Mmin в точке перегиба nр. Второй участок имеет минимальный момент Mmin в точке перегиба nр и растущий до  в конечной точке рабочей характеристики n2=n1+nраб, где nраб - число рабочих оборотов спирального пружинного механизма.
в конечной точке рабочей характеристики n2=n1+nраб, где nраб - число рабочих оборотов спирального пружинного механизма.
Число оборотов вала в начале рабочей характеристики n1 (число холостых оборотов), длина L и толщина h пружинной ленты, радиус вала и радиус барабана спирального пружинного механизма, максимальный момент на рабочей характеристике пружинного двигателя Мmax могут быть получены в результате расчета пружинного двигателя по методике, описанной в книге Т.А. Гевондян. Пружинные двигатели. - М.: Государственное издательство оборонной промышленности, 1956. - 368 с. В качестве исходных данных выступают число рабочих оборотов nраб, минимальный рабочий момент пружинного двигателя Mmin равный моменту перегиба характеристики жесткости и выбираемая ширина прямого участка пружинной ленты b.
Параметры характеристики жесткости спирального пружинного механизма с переменной шириной пружинной ленты имеют следующие зависимости от параметров пружинного двигателя и трапециевидного участка:
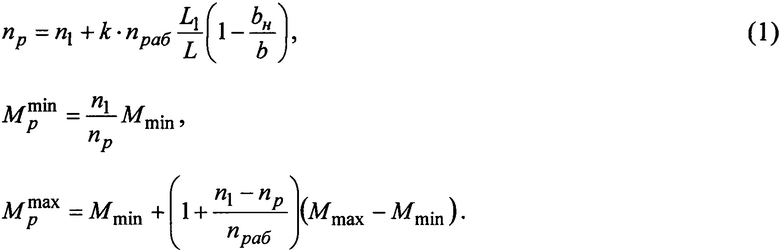
Коэффициент k формулы (1) равен отношению длины рабочего хода до точки перегиба характеристики к общей длине рабочей характеристики для спирального пружинного механизма, у которого пружинная лента выполнена в виде равнобедренного треугольника, то есть L1=L, bн→0. Значение коэффициента k определяется экспериментально.
Расчет спирального пружинного механизма может быть произведен, например, следующим образом:
В качестве исходных данных выбираются следующие параметры: Mmin=310 кгс⋅мм, nраб=7.5 об, nр=4 об, материал пружинной ленты ЭИ-142, b=85 мм.
По методике Т.А. Гевондян. Пружинные двигатели. - М.: Государственное издательство оборонной промышленности, 1956. - 368 с. определяются параметры пружинного двигателя с лентой постоянной ширины Мmax=675 кгс⋅мм, L=1598 мм, h=0.428 мм, n1=1.25 об, RБ=22 мм, RВ=6.5 мм.
Изготавливают барабан пружинного механизма, вал пружинного механизма указанных размеров, пружинная лента формы равнобедренного треугольника с основанием b=85 мм и высотой L=1598 мм (лента изготавливается согласно технологии, представленной в А. Гевондян. Пружинные двигатели. - М.: Государственное издательство оборонной промышленности, 1956. - 368 с.).
Выполняют измерение характеристики жесткости пружинного механизма с лентой в виде равнобедренного треугольника на экспериментальном стенде.
Определяют угол поворота вала nk, на котором происходит перегиб характеристики испытуемого пружинного механизма, перегиб происходит при достижении момента на валу равного Мmin=310 кгс⋅мм, для испытуемого пружинного механизма nk=7.3 об.
Определяют коэффициент k=(nk - n1)/nраб=0.81.
Выбирается ширина трапециевидного участка в начале участка, достаточная для осуществления прочного зацепления ленты на валу bn=10 мм;
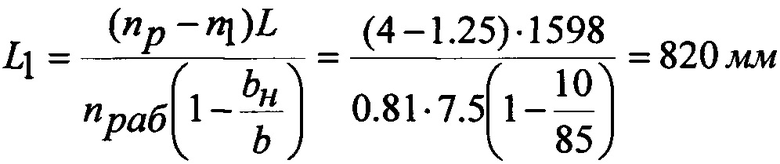
Из формулы (1) выражается зависимость длины трапециевидного участка от ширины в начале участка:
 ;
;
Определяют длину трапециевидного участка для реализации желаемого местоположения точки перегиба:
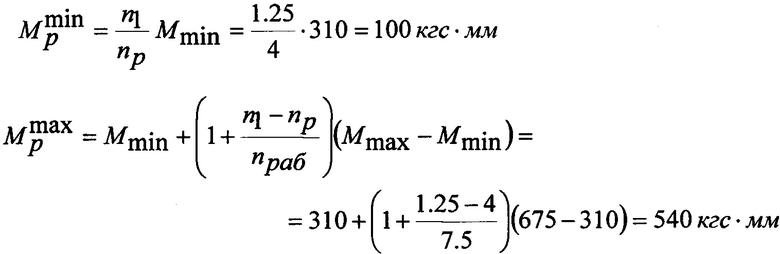
определяются недостающие параметры характеристики жесткости:
Необходимость изменения наклона на начальном участке рабочего хода характеристики жесткости спирального пружинного механизма обусловлена его применением в перспективном периферийном стыковочном механизме, основные элементы которого показаны на фиг. 3. Это стыковочное кольцо 4 с направляющими выступами 5 и установленными на них корпусами 6 механизмов защелок 7; шесть штанг 8, двигающихся независимо друг от друга, корпуса 9 которых связаны с корпусом 10 стыковочного агрегата вращательным шарнирами 11; в каждой штанге 8 установлен шток 12 с возможностью поступательного перемещения относительно корпуса 9 штанги, первый конец которого связан вращательным шарниром 13 со стыковочным кольцом 4, а на втором его конце, входящем в корпус 9, установлен шарико-винтовой преобразователь (ШВП) 14; винт 15, установленный внутри корпуса 9 с возможностью вращения относительно его продольной оси и с одной стороны образует соосное зацепление с ШВП 14 подвижного штока 12, а с другой связан паразитной шестерней 16 с валом 17 спирального пружинного механизма (ПМ) кручения 18, установленного снаружи корпуса 9 штанги соосно с входным валом храпового механизма 19, выходной вал которого соединен соосно с электромагнитной фрикционной муфтой (ЭФМ) 20 и через понижающий редуктор 21 с входным валом устройства контактного штанги (УКШ) 22; электропривод 23, на выходном валу которого закреплен барабан 24, на который наматываются три троса 25, каждый из которых подается с барабана на направляющий ролик 26 с направляющим устройством 27, предотвращающим образование петли, проходит через конические направляющие устройства 28 и 29 для выравнивания стыковочного кольца относительно агрегата, установленные на корпусе 10 агрегата и на кольце 4, и соединяется через пружину компенсации разности длин тросов (например, пружину Белльвилля) 30 с корпусом 6 механизма защелок 7, установленным на направляющем выступе 5 кольца 4; контактные датчики совмещения колец (ДСК) 31, установленные на кольце 4 рядом с его направляющими выступами 5; датчики втянутого положения (ДВтП) 32, установленные на корпусе 10 агрегата ниже его стыковочной плоскости 33, но выше плоскости 34, проходящей через нижнюю кромку кольца 4 во втянутом положении СтМ; устройство контактное электропривода (УКП) 36, соединенное через понижающий редуктор 35 с валом электропривода 23, а также блок управления, получающий сигналы с УКШ 22, ДСК 31, ДВтП 32 и УКП 35, и подающий управляющие напряжения Um на ЭФМ 20 и +/-Ud на электропривод 23.
При стыковке первый контакт между стыковочным кольцом 4 и пассивным агрегатом приводит к уменьшению длины выходящего из корпуса 9 штока 12 хотя бы одной из штанг 8 и к обнулению сигнала в ее УКШ 22. Блок управления при обнулении сигнала хотя бы одного УКШ 22 подает сигналы на включение ЭФМ 20 всех штанг 8, что приводит к разблокировке выходных валов храповых механизмов 19 и вращению валов 17 ПМ 18 в направлении ослабления пружин и к выдвижению штоков 12 из корпусов 9 всех штанг 8 и к выдвижению стыковочного кольца 4 навстречу стыковочному агрегату пассивного космического аппарата.
При получении сигналов от всех (минимум трех) датчиков совмещения колец (ДСК) блок управления запоминает состояние «Сцепка» и выключает ЭФМ 20 всех штанг 8, что приводит к блокировке вращения выходных валов храповых механизмов 19 и блокировке вращения валов 17 ПМ 18 в направлении ослабления пружин и увеличения длин штоков 12, выходящих из корпусов 9 штанг 8. После этого ПМ 18 только поглощают энергию сближения активного КА, противодействуя только уменьшению длин штоков 12, выходящих из корпусов 9 штанг 8.
Спиральный пружинный механизм 18 одностороннего действия с переменной шириной спиральной пружинной ленты обеспечивает изменение момента и соответственно силы сопротивления штанг в более широком диапазоне, чем при использовании пружинной ленты постоянной ширины. Это позволяет при выдвижении стыковочного кольца, во-первых, увеличить податливость стыковочного механизма и тем самым улучшить условия сцепки, а во-вторых - снизить ударные нагрузки при контакте со стыковочным агрегатом пассивного космического аппарата, что дает возможность выполнять стыковку с использованием космического манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| УСТРОЙСТВО СТЯГИВАНИЯ ПЕРИФЕРИЙНОГО СТЫКОВОЧНОГО МЕХАНИЗМА | 2018 |
|
RU2706741C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ФРИКЦИОННЫЙ МНОГОДИСКОВЫЙ ТОРМОЗ | 2018 |
|
RU2695464C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ФРИКЦИОННЫЙ МНОГОДИСКОВЫЙ ТОРМОЗ | 2018 |
|
RU2693756C1 |
| УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2706640C1 |
| Турбулизирующее устройство для теплообменной трубы | 2019 |
|
RU2714469C2 |
| Баллистическая возвращаемая капсула | 1990 |
|
SU1818283A1 |
| РУЛОННАЯ ПРУЖИНА И ЗАПОРНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2008 |
|
RU2361132C1 |
Изобретение относится к области машиностроения. Спиральный пружинный механизм состоит из входного вала, пружинной ленты и развязанного с входным валом неподвижного барабана. Пружинная лента выполнена с участком постоянной ширины и с участком в форме трапеции и основаниями, переходящими в ленту постоянной ширины. Конец пружины с участком постоянной ширины прикреплен к барабану, а другой конец пружины закреплен на валу спирального пружинного механизма. Достигается изменение наклона начального участка характеристики жесткости спирального пружинного механизма. 5 ил.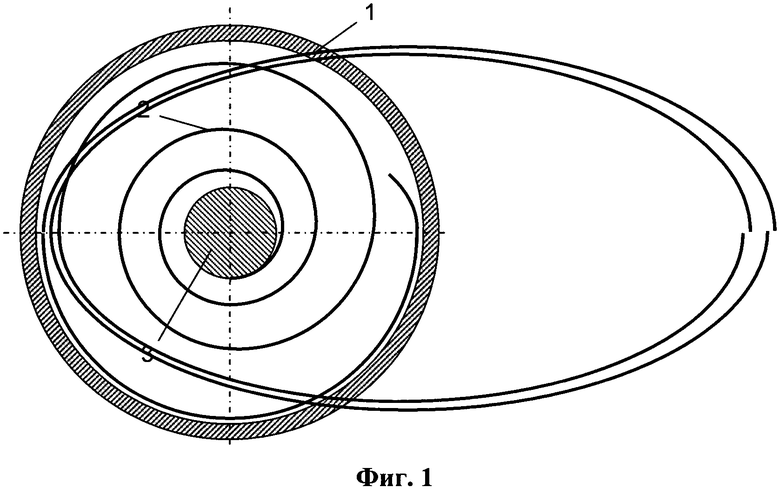
Спиральный пружинный механизм, состоящий из входного вала, пружинной ленты и развязанного с входным валом неподвижного барабана, отличающийся тем, что в нем пружинная лента длиной L выполнена с участком постоянной ширины b, и с участком в форме трапеции высоты L1, и основаниями шириной b, переходящими в ленту постоянной ширины, и шириной bн меньше b на заданную величину Δb, при один этом конец пружины с участком постоянной ширины b прикреплен к барабану, а другой конец пружины шириной bн закреплен на валу спирального пружинного механизма.
| Комплексный реагент для тампонажных растворов | 1986 |
|
SU1451257A1 |
| WO 9830811 A1, 16.07.1998 | |||
| JP S5594041 A, 17.07.1980 | |||
| Способ выработки творога и аппарат для осуществления способа | 1953 |
|
SU97139A1 |

