ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНУЮ(ЫЕ) ЗАЯВКУ(И)
[0001] Настоящая заявка подана 27 октября 2017 г. в качестве международной патентной заявки PCT и испрашивает преимущество приоритета по предварительной заявке на патент США № 62/414,655, поданной 28 октября 2016 г., и предварительной заявке на патент США № 62/525,948, поданной 28 июня 2017 г., полные раскрытия которых полностью включены сюда посредством ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0002] Изобретение по существу относится к области автоматической подготовки и оценки вещества. В частности изобретение относится к способам и системам оценки текучего вещества, такого как, например, образец с физиологической жидкостью (текучей средой), в контейнере и/или в дозирующем наконечнике. Дополнительно изобретение относится к элементам компьютерной программы, обеспечивающим инструкции для вычислительного устройства и/или устройства обработки по выполнению стадий любого из способов оценки текучего вещества. Более того, изобретение относится к машиночитаемым носителям, в которых хранятся такие элементы компьютерной программы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Целью настоящего изобретения может быть предложение усовершенствованных способов и систем автоматической оценки текучих веществ с повышенной надежностью, повышенным качеством, улучшенной точностью и улучшенной пропускной способностью.
[0004] Цель настоящего изобретения достигается с помощью объекта изобретения из независимых пунктов формулы изобретения, в котором дополнительные варианты осуществления включены в зависимые пункты формулы изобретения и в представленное ниже описание.
[0005] В соответствии с первым аспектом описания предложен способ оценки текучего вещества в контейнере. Помимо прочего, способ в соответствии с первым аспектом может относиться к способу функционирования системы оценки дозирующих наконечников, как описано в качестве примера со ссылкой на Фиг. 1, и/или к способу функционирования устройства определения качества образца, как описано в качестве примера со ссылкой на Фиг. 42–55. Также способ в соответствии с первым аспектом может относиться к способу функционирования системы определения объема, как описано в качестве примера со ссылкой на Фиг. 5–15 и/или Фиг. 9–21. Более того, способ по первому аспекту может относиться к способу функционирования системы генерации корреляционных данных, как описано в качестве примера со ссылкой на Фиг. 8–21.
[0006] Способ по первому аспекту включает в себя стадии:
– захвата с помощью устройства захвата изображения по меньшей мере части контейнера, причем устройство захвата изображения может содержать блок захвата изображения;
– получения с использованием по меньшей мере одного вычислительного устройства и/или по меньшей мере одного устройства обработки множества цветовых параметров по меньшей мере части изображения; и
– формирования результата классификации образца для текучего вещества, содержащегося в контейнере, на основании множества цветовых параметров.
В этом случае результат классификации образца является характерным и/или указывает на концентрацию по меньшей мере одного мешающего компонента в текучем веществе.
Здесь и далее устройство захвата изображения и/или блок захвата изображения могут представлять собой, например, устройство захвата изображения дозирующего наконечника.
[0007] В соответствии с вариантом осуществления способа по первому аспекту получение множества цветовых параметров включает в себя:
– генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов; и
– получение множества средних значений и/или средних для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество средних значений для множества цветовых каналов.
В этом случае среднее и/или среднее значение можно определить для каждого из цветовых каналов или для части цветовых каналов.
[0008] В соответствии с вариантом осуществления способа по первому аспекту получение множества цветовых параметров включает в себя:
– генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов; и
– получение и/или определение множества римановых сумм для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество римановых сумм для множества цветовых каналов.
В этом случае риманову сумму можно получить и/или определить для каждого из цветовых каналов или для части цветовых каналов.
[0009] В соответствии с вариантом осуществления способа по первому аспекту получение множества цветовых параметров включает в себя:
– генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
– получение множества мод для множества цветовых каналов;
– получение множества максимумов для множества цветовых каналов; и/или
– получение множества минимумов для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество мод, максимумов и/или минимумов для множества цветовых каналов.
[0010] В соответствии с вариантом осуществления способа по первому аспекту получение множества цветовых параметров включает в себя:
– генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
– получение множества начальных значений гистограмм для множества цветовых каналов;
– получение множества конечных значений гистограмм для множества цветовых каналов;
– получение множества процентных начальных значений гистограмм для множества цветовых каналов; и/или
– получение множества процентных конечных значений гистограмм для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество начальных значений гистограмм, конечных значений гистограмм, начальных процентных значений гистограмм и/или конечных процентных значений гистограмм для множества цветовых каналов.
[0011] В соответствии с вариантом осуществления способа по первому аспекту множество цветовых параметров включает в себя по меньшей мере одно из множества средних для цветовых каналов, множества римановых сумм для цветовых каналов, множества мод для цветовых каналов, множества максимумов для цветовых каналов, множества минимумов для цветовых каналов, множества начальных значений гистограмм для цветовых каналов, множества конечных значений гистограмм для цветовых каналов, множества начальных процентных значений гистограмм для цветовых каналов, множества конечных процентных значений гистограмм для цветовых каналов или любую комбинацию вышеуказанного.
[0012] В соответствии с вариантом осуществления способа по первому аспекту множество цветовых каналов включает в себя красный компонент, зеленый компонент и синий компонент, например, в модели RGB. Однако также можно использовать любой другой тип цветовой модели, такой как, например, цветовая модель CMYK.
[0013] В соответствии с вариантом осуществления способа по первому аспекту результат классификации образца включает в себя по меньшей мере один идентификатор классификации, причем по меньшей мере один идентификатор классификации сопоставлен с по меньшей мере частью множества цветовых параметров и/или сопоставлен с концентрацией по меньшей мере одного мешающего компонента в текучем веществе.
[0014] В соответствии с вариантом осуществления способа по первому аспекту способ дополнительно включает в себя отметку результата флагом на основании результата классификации образца; причем отмеченный флагом результат указывает на качество текучего вещества. Альтернативно или дополнительно качество текучего вещества определяется на основании результата квалификации образца.
[0015] В соответствии с вариантом осуществления способа по первому аспекту по меньшей мере один мешающий компонент представляет собой один или более из гемоглобина, состояния желтухи и липемии.
[0016] В соответствии с вариантом осуществления способа по первому аспекту контейнер представляет собой дозирующий наконечник, выполненный с возможностью аспирации текучего вещества и/или образца.
[0017] В соответствии с вариантом осуществления способа по первому аспекту устройство захвата изображения выполнено и/или размещено с возможностью захвата изображения части текучего вещества и/или контейнера сбоку от контейнера.
[0018] В соответствии с вариантом осуществления способа по первому аспекту способ дополнительно включает в себя стадии:
– идентификации и/или определения с использованием по меньшей мере одного вычислительного устройства опорной точки на изображении, причем опорная точка связана с контейнером;
– идентификации и/или определения с использованием по меньшей мере одного вычислительного устройства уровня поверхности текучего вещества внутри контейнера на изображении;
– определения и/или измерения расстояния между опорной точкой и уровнем поверхности; и
– преобразования расстояния в объем текучего вещества на основании корреляционных данных, причем корреляционные данные включают в себя информацию о корреляции между объемами внутри контейнера и расстояниями от опорной точки до множества уровней поверхности внутри контейнера.
Однако следует отметить, что термин «корреляционные данные» может также относиться к уравнению и/или функциональному соотношению между расстоянием и объемом.
[0019] В соответствии с вариантом осуществления способа по первому аспекту расстояние измеряется в пикселях.
[0020] В соответствии с вариантом осуществления способа по первому аспекту контейнер представляет собой дозирующий наконечник, выполненный с возможностью аспирации текучего вещества, причем идентификация опорной точки включает в себя идентификацию и/или определение опорной линии, образованной на дозирующем наконечнике, например, опорной линии, образованной на корпусе дозирующего наконечника.
[0021] В соответствии с вариантом осуществления способа по первому аспекту опорная линия идентифицируется на основании соответствия шаблону и/или на основании сегментирования захваченного изображения.
[0022] В соответствии с вариантом осуществления способа по первому аспекту идентификация опорной линии включает в себя поиск шаблона, представляющего опорную линию, на захваченном изображении.
[0023] В соответствии с вариантом осуществления способа по первому аспекту идентификация опорной линии включает в себя сравнение по меньшей мере части захваченного изображения с эталонным изображением.
[0024] В соответствии с вариантом осуществления способа по первому аспекту способ дополнительно включает в себя определение коэффициента соответствия, балльной оценки соответствия и/или значения корреляции части захваченного изображения и эталонного изображения.
[0025] В соответствии с вариантом осуществления способа по первому аспекту способ дополнительно включает в себя стадии:
– подачи жидкости в дополнительный контейнер;
– определения объема поданной жидкости;
– захвата дополнительного изображения контейнера;
– определения в пикселях расстояния до опорной точки на изображении, связанной с дополнительным контейнером; и
– сопоставления определенного объема с определенным расстоянием в пикселях.
[0026] В соответствии с вариантом осуществления способа по первому аспекту способ дополнительно включает в себя генерацию корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
[0027] В соответствии с вариантом осуществления способа по первому аспекту корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов жидкости, поданных в дополнительный контейнер.
[0028] В соответствии с вариантом осуществления способа по первому аспекту поданная жидкость содержит раствор красителя. Альтернативно или дополнительно объем поданной жидкости определяют на основании спектрофотометрии.
[0029] В соответствии с вариантом осуществления способа по первому аспекту определение объема поданной жидкости включает в себя определение массы поданной жидкости.
[0030] Следует отметить, что любой вариант осуществления способа в соответствии с первым аспектом, описанный выше, можно комбинировать с одним или более дополнительными вариантами осуществления способа в соответствии с первым аспектом, описанным выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0031] В соответствии со вторым аспектом описания предложен компьютерный программный элемент, который при исполнении на вычислительном устройстве системы оценки текучего вещества подает вычислительному устройству и/или системе инструкции на выполнение стадий способа в соответствии с первым аспектом и/или в соответствии с любым вариантом осуществления первого аспекта.
[0032] В соответствии с третьим аспектом описания предложен невременный машиночитаемый носитель, на котором хранится компьютерный программный элемент в соответствии со вторым аспектом описания.
[0033] В соответствии с четвертым аспектом описания предложена система оценки текучего вещества. Помимо прочего, система в соответствии с четвертым аспектом может относиться к системе оценки дозирующих наконечников, как описано в качестве примера со ссылкой на Фиг. 1, и/или к устройству определения качества образца, как описано в качестве примера со ссылкой на Фиг. 42–55. Кроме того, система в соответствии с четвертым аспектом может относиться к системе определения объема, как описано в качестве примера со ссылкой на Фиг. 1, Фиг. 6–15 и/или Фиг. 9–21. Более того, система в соответствии с четвертым аспектом может относиться к системе генерации корреляционных данных, как описано в качестве примера со ссылкой на Фиг. 8–21.
[0034] Система в соответствии с четвертым аспектом содержит устройство пипетирования образца, имеющее дозирующий наконечник. Устройство пипетирования образца может относиться к устройству пипетирования вещества. В этом случае устройство пипетирования образца выполнено с возможностью по меньшей мере частичного зацепления дозирующего наконечника и аспирации текучего вещества в дозирующий наконечник. Система дополнительно содержит блок захвата изображения и по меньшей мере одно вычислительное устройство, которое может содержать и/или относиться к устройству обработки. В этом случае блок захвата изображения выполнен с возможностью захвата изображения по меньшей мере части текучего вещества в дозирующем наконечнике, причем вычислительное устройство выполнено с возможностью получения множества цветовых параметров по меньшей мере части изображения и генерирования результата классификации образца для текучего вещества, содержащегося в дозирующем наконечнике, на основании множества цветовых параметров, при этом результат классификации образца является характерным и/или указывает на концентрацию по меньшей мере одного мешающего вещества в текучем веществе.
[0035] Иными словами, система может содержать устройство пипетирования образца, имеющее дозирующий наконечник, причем устройство пипетирования образца выполнено с возможностью зацепления дозирующего наконечника, при этом устройство пипетирования образца выполнено с возможностью аспирации текучего вещества в дозирующий наконечник. Система может дополнительно содержать блок захвата изображения, выполненный с возможностью захвата изображения по меньшей мере части текучего вещества в дозирующем наконечнике, по меньшей мере одно вычислительное устройство и по меньшей мере одним машиночитаемый носитель данных, на котором хранятся инструкции, которые при исполнении по меньшей мере одним вычислительным устройством приводят к тому, что система захватывает с использованием блока захвата изображения изображение по меньшей мере части текучего вещества, содержащегося в наконечнике для дозирования, получение множества цветовых параметров по меньшей мере части изображения и генерацию результата классификации образца для текучего вещества, содержащегося в дозирующем наконечнике, на основании множества цветовых параметров, при этом результат классификации образца является признаком концентрации по меньшей мере одного мешающего компонента в текучем веществе.
[0036] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– генерирует гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
– получает множество средних значений для множества цветовых каналов; и/или
– получает множество римановых сумм для множества цветовых каналов.
В данном случае множество цветовых параметров включает в себя множество средних и/или множество римановых сумм для цветовых каналов.
[0037] В соответствии с вариантом осуществления системы по четвертому аспекту результат классификации образца включает в себя по меньшей мере один идентификатор классификации, причем по меньшей мере один идентификатор классификации сопоставлен с по меньшей мере частью множества цветовых параметров и/или сопоставлен с концентрацией по меньшей мере одного мешающего компонента в текучем веществе. В этом случае результат классификации образца может включать в себя по меньшей мере один из множества идентификаторов классификации, причем множество идентификаторов классификации коррелирует с множеством цветовых параметров.
[0038] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– идентифицирует опорную точку на изображении, причем опорная точка связана с дозирующим наконечником;
– определяет уровень поверхности текучего вещества внутри дозирующего наконечника на изображении;
– определяет и/или измеряет расстояние между опорной точкой и уровнем поверхности; и
– преобразует расстояние в объем текучего вещества на основании корреляционных данных, при этом корреляционные данные включают в себя информацию о корреляции между объемами в дозирующем наконечнике и расстояниями от опорной точки до множества уровней поверхности внутри дозирующего наконечника.
В этом случае корреляционные данные могут также относиться к уравнению и/или к функциональному соотношению между расстоянием и объемом.
[0039] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью определения опорной линии, образованной на корпусе дозирующего наконечника, и определения опорной точки на основании определенной опорной линии. В этом случае опорная точка на изображении может включать в себя опорную линию, образованную на корпусе дозирующего наконечника.
[0040] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью определения опорной линии на основании соответствия шаблону и/или на основании сегментирования захваченного изображения.
[0041] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью поиска и/или идентификации шаблона, представляющего опорную линию на захваченном изображении.
[0042] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью сравнения по меньшей мере части захваченного изображения с эталонным изображением.
[0043] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью определения коэффициента соответствия, балльной оценки соответствия и/или корреляционного значения для части захваченного изображения и эталонного изображения.
[0044] В соответствии с вариантом осуществления системы по четвертому аспекту блок захвата изображения выполнен и/или размещен с возможностью захвата изображения части текучего вещества сбоку от дозирующего наконечника.
[0045] В соответствии с вариантом осуществления системы по четвертому аспекту система дополнительно содержит модуль пипетирования образца, причем блок захвата изображения прикреплен к модулю пипетирования образца.
[0046] В соответствии с вариантом осуществления системы по четвертому аспекту система дополнительно содержит источник света, расположенный напротив блока захвата изображения и расположенный сбоку от дозирующего наконечника, причем источник света выполнен с возможностью освещения дозирующего наконечника сбоку от дозирующего наконечника.
[0047] В соответствии с вариантом осуществления системы по четвертому аспекту система дополнительно содержит источник света и модуль пипетирования образца, причем источник света и блок захвата изображения прикреплены к модулю пипетирования образца; и/или причем источник света и блок захвата изображения выполнены с возможностью перемещения, например, горизонтально, вместе с модулем пипетирования образца так, что изображение дозирующего наконечника может быть захвачено в любом положении модуля пипетирования образца. В частности изображение может быть захвачено в любом положении вдоль траектории и/или вдоль направляющей для перемещения образца модуля пипетирования образца.
[0048] В соответствии с вариантом осуществления системы по четвертому аспекту устройство пипетирования образца выполнено с возможностью аспирации жидкости в дополнительный дозирующий наконечник, причем система выполнена с возможностью определения объема аспирированной жидкости, при этом блок захвата изображения выполнен с возможностью захвата дополнительного изображения дополнительного дозирующего наконечника и при этом вычислительное устройство выполнено с возможностью определения расстояния до опорной точки на изображении, связанной с дополнительным дозирующим наконечником, и выполнено с возможностью определения объема по определенному расстоянию в пикселях.
[0049] В соответствии с вариантом осуществления системы по четвертому аспекту вычислительное устройство выполнено с возможностью генерации корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
[0050] В соответствии с вариантом осуществления системы по четвертому аспекту корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов жидкости, аспирированной в дополнительный дозирующий наконечник.
[0051] В соответствии с вариантом осуществления системы по четвертому аспекту аспирированная жидкость содержит раствор красителя. Альтернативно или дополнительно система выполнена с возможностью определения объема аспирированной жидкости на основании спектрофотометрии.
[0052] В соответствии с вариантом осуществления системы по четвертому аспекту система выполнена с возможностью определения массы аспирированной жидкости и определения объема аспирированной жидкости на основании определенной массы аспирированной жидкости.
[0053] Следует отметить, что любой вариант осуществления системы в соответствии с четвертым аспектом, описанный выше, может комбинироваться с одним или более дополнительными вариантами осуществления системы в соответствии с четвертым аспектом, описанными выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0054] Дополнительно следует отметить, что любые особенности, функции, характеристики и/или элементы системы в соответствии с четвертым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики, стадии и/или элементы способа в соответствии с первым аспектом, описанным выше и далее. И наоборот, любые особенности, функции, характеристики, стадии и/или элементы способа в соответствии с первым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики и/или элементы системы в соответствии с четвертым аспектом, описанным выше и далее.
[0055] В соответствии с пятым аспектом настоящего описания предложена система оценки текучего вещества. Помимо прочего, система в соответствии с пятым аспектом может относиться к устройству определения выравнивания наконечника, как описано в качестве примера со ссылкой, например, на Фиг. 56–58. Система в соответствии с пятым аспектом может дополнительно относиться к системе оценки дозирующего наконечника и/или к системе определения объема, как описано в качестве примера со ссылкой на Фиг. 1, Фиг. 5–15 и/или Фиг. 9–21. Кроме того, система в соответствии с пятым аспектом может относиться к системе генерации корреляционных данных, как описано в качестве примера со ссылкой на Фиг. 8–21.
[0056] Система в соответствии с пятым аспектом содержит устройство пипетирования образца, выполненное с возможностью по меньшей мере частичного зацепления дозирующего наконечника, причем устройство пипетирования образца выполнено с возможностью аспирации текучего вещества в дозирующий наконечник, при этом дозирующий наконечник имеет по меньшей мере одну опорную линию. Устройство пипетирования образца может относиться к устройству пипетирования вещества. Система дополнительно содержит блок захвата изображения, выполненный с возможностью захвата изображения по меньшей мере части дозирующего наконечника, и по меньшей мере одно вычислительное устройство, которое может содержать устройство обработки, выполненное с возможностью:
– идентификации по меньшей мере одной опорной линии на дозирующем наконечнике по части изображения дозирующего наконечника;
– определения по меньшей мере одной характеристики по меньшей мере одной опорной линии; и
– сравнения по меньшей мере одной характеристики по меньшей мере одной опорной линии с пороговым значением, которое отражает смещение дозирующего наконечника.
Вычислительное устройство может быть выполнено с возможностью определения того, соответствует ли характеристика по меньшей мере одной опорной линии пороговому значению, причем пороговое значение представляет собой отражение смещения дозирующего наконечника. В данном случае смещение может относиться к смещению относительно блока захвата изображения и/или относительно модуля пипетирования образца.
[0057] Система может также содержать по меньшей мере один машиночитаемый носитель данных, на котором хранятся программные инструкции, которые при исполнении по меньшей мере одним устройством обработки и/или вычислительным устройством приводят к тому, что система:
– идентифицирует по меньшей мере одну опорную линию дозирующего наконечника на изображении дозирующего наконечника;
– получает одну или более характеристик по меньшей мере одной опорной линии; и
– определяет, соответствует ли характеристика по меньшей мере одной опорной линии пороговому значению, причем пороговое значение представляет собой отражение смещения дозирующего наконечника.
[0058] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одна опорная линия включает в себя первую опорную линию и вторую опорную линию, образованные на дозирующем наконечнике.
[0059] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одна опорная линия включает в себя первую опорную линию и вторую опорную линию, образованные на дозирующем наконечнике, причем по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– получает по меньшей мере одну характеристику по меньшей мере одной опорной линии на основании:
– определения и/или расчета длины первой опорной линии;
– определения и/или расчета длины второй опорной линии; и
– определения и/или расчета угла линии по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии, при этом линия соединяет заданную точку первой опорной линии с заданной точкой второй опорной линии; и
– определяет смещение, например, смещение дозирующего наконечника относительно блока захвата изображения и/или относительно модуля пипетирования образца на основании по меньшей мере одной из длины первой опорной линии, длины второй опорной линии и угла линии.
[0060] В соответствии с вариантом осуществления системы по пятому аспекту система выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система в ответ на определение смещения предотвращает аспирацию текучего вещества в дозирующий наконечник устройством пипетирования образца. В качестве примера, вычислительное устройство может быть выполнено с возможностью генерации и/или вывода сигнала отмены в ответ на определение смещения.
[0061] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система в ответ на определение смещения устанавливает флаг и/или инициирует аспирацию текучего вещества в дозирующий наконечник.
[0062] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– идентифицирует по меньшей мере одну опорную линию на дозирующем наконечнике по части изображения дозирующего наконечника;
– определяет уровень поверхности текучего вещества внутри дозирующего наконечника на изображении;
– определяет и/или измеряет расстояние между по меньшей мере одной опорной линией и уровнем поверхности; и
– определяет объем текучего вещества путем преобразования расстояния в объем текучего вещества на основе корреляционных данных, причем корреляционные данные включают в себя информацию о корреляции между объемами внутри дозирующего наконечника и расстояниями от по меньшей мере одной опорной линии до множества уровней поверхности внутри дозирующего наконечника.
В этом случае корреляция может также относиться к уравнению и/или к функциональному соотношению между расстоянием и объемом.
[0063] В соответствии с вариантом осуществления системы по пятому аспекту вычислительное устройство выполнено с возможностью определения опорной линии на основании соответствия шаблону и/или на основании сегментирования захваченного изображения.
[0064] В соответствии с вариантом осуществления системы по пятому аспекту вычислительное устройство выполнено с возможностью поиска шаблона, представляющего опорную линию на захваченном изображении.
[0065] В соответствии с вариантом осуществления системы по пятому аспекту вычислительное устройство выполнено с возможностью сравнения по меньшей мере части захваченного изображения с эталонным изображением.
[0066] В соответствии с вариантом осуществления системы по пятому аспекту вычислительное устройство выполнено с возможностью определения соответствующего коэффициента, соответствующего результата и/или корреляционного значения для части захваченного изображения и эталонного изображения.
[0067] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одна опорная линия включает в себя первую опорную линию и вторую опорную линию, образованные на дозирующем наконечнике, причем по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– определяет и/или рассчитывает длину первой опорной линии на изображении;
– определяет и/или рассчитывает длину второй опорной линии на изображении;
– определяет и/или рассчитывает угол линии по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии, при этом линия соединяет заданную точку первой опорной линии с заданной точкой второй опорной линии;
– определяет смещение, например, смещение дозирующего наконечника относительно блока захвата изображения и/или относительно модуля пипетирования образца на основании по меньшей мере одной из длины первой опорной линии, длины второй опорной линии и угла линии; и
– регулирует объем текучего вещества на основании определения смещения.
[0068] В соответствии с вариантом осуществления системы по пятому аспекту смещение дозирующего наконечника включает в себя боковое смещение и смещение по глубине. В этом случае боковое смещение может относиться к смещению дозирующего наконечника по отношению к оптической оси камеры и/или блока захвата изображения. Смещение по глубине может относиться к смещению дозирующего наконечника вдоль оптической оси камеры и/или блока захвата изображения.
[0069] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одна опорная линия включает в себя первую опорную линию и вторую опорную линию, образованные на дозирующем наконечнике, причем по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– идентифицирует заданную точку первой опорной линии на изображении;
– идентифицирует заданную точку второй опорной линии на изображении;
– определяет линию выравнивания, соединяющую заданную точку первой опорной линии с заданной точкой второй опорной линии;
– определяет угол линии выравнивания по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии; и
– сравнивает угол с пороговым значением угла, при этом пороговое значение угла представляет собой боковое смещение дозирующего наконечника.
В этом случае можно определить, меньше ли угол линии выравнивания порогового значения угла, причем пороговое значение угла представляет собой боковое смещение дозирующего наконечника.
[0070] В соответствии с вариантом осуществления системы по пятому аспекту заданная точка первой опорной линии представляет собой центральную точку первой опорной линии на изображении, а заданная точка второй опорной линии представляет собой центральную точку второй опорной линии на изображении.
[0071] В соответствии с вариантом осуществления системы по пятому аспекту система выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система в ответ на определение того, что угол линии выравнивания относительно по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его, предотвращает аспирацию текучего вещества в дозирующий наконечник устройством пипетирования образца. Система и/или вычислительное устройство могут быть выполнены с возможностью генерации и/или вывода сигнала отмены в ответ на определение того, что угол линии выравнивания относительно по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его. Соответственно, система может быть выполнена с возможностью предотвращения аспирации текучего вещества в дозирующий наконечник устройством пипетирования вещества и/или устройством пипетирования образца в ответ на определение того, что угол линии выравнивания не меньше порогового значения угла.
[0072] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система в ответ на определение того, что угол линии выравнивания относительно по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его, устанавливает флаг аспирации текучего вещества в дозирующий наконечник и/или инициирует аспирацию текучего вещества в дозирующий наконечник, например, путем установки флага аспирации. Соответственно, система может быть выполнена с возможностью установки флага аспирации текучего вещества в дозирующий наконечник в ответ на определение того, что угол линии выравнивания не меньше порогового значения угла.
[0073] В соответствии с вариантом осуществления системы по пятому аспекту по меньшей мере одно вычислительное устройство дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– определяет и/или идентифицирует длину по меньшей мере одной опорной линии на основании захваченного изображения наконечника;
– получает фактическую длину по меньшей мере одной опорной линии;
– рассчитывает соотношение между длиной по меньшей мере одной опорной линии и фактической длиной по меньшей мере одной опорной линии; и
– определяет смещение дозирующего наконечника по глубине на основании соотношения.
[0074] Альтернативно или дополнительно программные инструкции дополнительно приводят к тому, что система:
– определяет длину первой опорной линии из захваченного изображения наконечника;
– получает фактическую длину первой опорной линии;
– рассчитывает соотношение между длиной первой опорной линии и фактической длиной первой опорной линии; и
– определяет смещение дозирующего наконечника по глубине на основании соотношения.
[0075] В соответствии с вариантом осуществления системы по пятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система корректирует определенный объем текучего вещества на основании соотношения.
[0076] В соответствии с вариантом осуществления системы по пятому аспекту система дополнительно содержит источник света и модуль пипетирования образца, причем источник света и блок захвата изображения прикреплены к модулю пипетирования образца и/или причем источник света и блок захвата изображения выполнены с возможностью перемещения, например, горизонтально, вместе с модулем пипетирования образца, так чтобы изображение дозирующего наконечника можно было захватывать в любом положении модуля пипетирования образца. В качестве примера, изображение может быть захвачено в любом месте вдоль траектории и/или вдоль направляющей для перемещения образца модуля пипетирования образца.
[0077] В соответствии с вариантом осуществления системы по пятому аспекту устройство пипетирования образца выполнено с возможностью аспирации жидкости в дополнительный дозирующий наконечник, причем система выполнена с возможностью определения объема аспирированной жидкости. Блок захвата изображения выполнен с возможностью захвата дополнительного изображения дополнительного дозирующего наконечника, причем вычислительное устройство выполнено с возможностью определения расстояния в пикселях до опорной точки на изображении, связанной с дополнительным дозирующим наконечником, и выполнено с возможностью сопоставления определенного объема с определенным расстоянием в пикселях.
[0078] В соответствии с вариантом осуществления системы по пятому аспекту вычислительное устройство выполнено с возможностью генерации корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
[0079] В соответствии с вариантом осуществления системы по пятому аспекту корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов жидкости, аспирированной в дополнительный дозирующий наконечник.
[0080] В соответствии с вариантом осуществления системы по пятому аспекту аспирированная жидкость содержит раствор красителя, и/или причем система выполнена с возможностью определения объема аспирированной жидкости на основании спектрофотометрии.
[0081] В соответствии с вариантом осуществления системы по пятому аспекту система выполнена с возможностью определения массы аспирированной жидкости и определения объема аспирированной жидкости на основании определенной массы аспирированной жидкости.
[0082] Следует отметить, что любой вариант осуществления системы в соответствии с пятым аспектом, описанный выше, может комбинироваться с одним или более дополнительными вариантами осуществления системы в соответствии с пятым аспектом, описанными выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0083] В соответствии с шестым аспектом описания предложен способ оценки текучего вещества в контейнере. Помимо прочего, способ в соответствии с шестым аспектом может относиться к способу функционирования устройства определения выравнивания наконечника, функционирования устройства оценки целостности в дозирующем наконечнике, функционирования системы определения объема и/или функционирования системы оценки дозирующих наконечников, как описано в качестве примера со ссылкой на Фиг. 1, Фиг. 5–15, Фиг. 9–21 и/или Фиг. 56–68.
[0084] Способ по шестому аспекту включает в себя стадии
– захвата изображения по меньшей мере части контейнера с использованием устройства захвата изображения, причем контейнер может представлять собой дозирующий наконечник;
– определения и/или идентификации первой опорной линии и второй опорной линии на контейнере по изображению контейнера с использованием по меньшей мере одного вычислительного устройства;
– определения и/или получения по меньшей мере одной характеристики по меньшей мере одной из первой опорной линии и второй опорной линии.
В этом случае по меньшей мере одна характеристика включает в себя по меньшей мере одну из длины первой опорной линии; длины второй опорной линии и угла линии по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии, причем линия соединяет заданную точку первой опорной линии с заданной точкой второй опорной линии. Способ по шестому аспекту дополнительно включает в себя стадию сравнения по меньшей мере одной характеристики по меньшей мере одной из первой опорной линии и второй опорной линии с пороговым значением, которое представляет смещение дозирующего наконечника.
[0085] Иными словами, способ в соответствии с шестым аспектом может включать в себя стадии:
– захвата с использованием устройства захвата изображения по меньшей мере части контейнера;
– идентификации с использованием по меньшей мере одного вычислительного устройства первой и второй опорных линий дозирующего наконечника по изображению дозирующего наконечника;
– получения одной или более характеристик первой и второй опорных линий, причем характеристики включают в себя по меньшей мере одну из длины первой опорной линии; длины второй опорной линии и угла линии по отношению к опорной линии, при этом линия соединяет заданную точку первой опорной линии с заданной точкой второй опорной линии; и
– определения того, соответствуют ли характеристики по меньшей мере одной опорной линии пороговому значению, при этом пороговое значение представляет собой смещение дозирующего наконечника.
[0086] В соответствии с вариантом осуществления способа по шестому аспекту первую опорную линию и вторую опорную линию определяют на основании соответствия шаблону и/или на основании сегментирования захваченного изображения.
[0087] В соответствии с вариантом осуществления способа по шестому аспекту определение первой опорной линии и второй опорной линии включает в себя поиск шаблона, представляющего первую опорную линию и/или вторую опорную линию на захваченном изображении.
[0088] В соответствии с вариантом осуществления способа по шестому аспекту определение первой опорной линии и второй опорной линии включает в себя сравнение по меньшей мере части захваченного изображения с эталонным изображением.
[0089] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя определение коэффициента соответствия, балльной оценки соответствия и/или значения корреляции части захваченного изображения и эталонного изображения.
[0090] В соответствии с вариантом осуществления способа по шестому аспекту контейнер содержит текучее вещество, причем способ дополнительно включает в себя:
– идентификацию уровня поверхности текучего вещества внутри контейнера по захваченному изображению;
– определение расстояния между по меньшей мере одной из первой опорной линии и второй опорной линии и уровнем поверхности; и
– определение объема текучего вещества путем преобразования расстояния в объем текучего вещества на основании корреляционных данных, причем корреляционные данные включают в себя информацию о корреляции между объемами внутри контейнера и расстояниями от по меньшей мере одной из первой опорной линии и второй опорной линии до множества уровней поверхности внутри контейнера.
В этом случае корреляционные данные могут также относиться к уравнению и/или к функциональному соотношению между расстоянием и объемом.
[0091] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя:
– определение длины первой опорной линии на изображении;
– определение длины второй опорной линии на изображении;
– определение угла линии по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии, причем линия соединяет заданную точку первой опорной линии с заданной точкой второй опорной линии;
– определение смещения контейнера на основании по меньшей мере одного из длины первой опорной линии, длины второй опорной линии и угла наклона линии; и
– корректировку объема текучего вещества на основании определения смещения.
В данном случае смещение может относиться к смещению относительно блока захвата изображения и/или относительно модуля пипетирования образца.
[0092] В соответствии с вариантом осуществления способа по шестому аспекту смещение контейнера включает в себя боковое смещение и смещение по глубине. В этом случае боковое смещение может относиться к смещению дозирующего наконечника по отношению к оптической оси камеры и/или блока захвата изображения, а смещение по глубине может относиться к смещению дозирующего наконечника вдоль оптической оси камеры и/или устройства захвата изображения.
[0093] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя:
– идентификацию заданной точки первой опорной линии на изображении;
– идентификацию заданной точки второй опорной линии на изображении;
– определение линии выравнивания, соединяющей заданную точку первой опорной линии с заданной точкой второй опорной линии;
– определение угла линии выравнивания по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии; и
– сравнение угла с пороговым значением угла, причем пороговое значение угла представляет боковое смещение контейнера.
[0094] В соответствии с вариантом осуществления способа по шестому аспекту заданная точка первой опорной линии представляет собой центральную точку первой опорной линии на изображении, а заданная точка второй опорной линии представляет собой центральную точку второй опорной линии на изображении.
[0095] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя предотвращение аспирации текучего вещества в контейнер в ответ на определение того, что угол линии выравнивания относительно по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его. Соответственно, сигнал отмены, предотвращающий аспирацию, может генерироваться в ответ на определение того, что угол линии выравнивания по отношению к по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его.
[0096] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя установку флага аспирации текучего вещества в контейнер и/или инициацию аспирации текучего вещества в контейнер в ответ на определение того, что угол линии выравнивания относительно по меньшей мере одной из первой опорной линии и второй опорной линии соответствует пороговому значению угла и/или превышает его.
[0097] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя:
– определение длины по меньшей мере одной из первой опорной линии и второй опорной линии по захваченному изображению контейнера;
– получение, например, от устройства хранения данных, фактической длины по меньшей мере одной из первой опорной линии и второй опорной линии;
– расчет соотношения между длиной по меньшей мере одной из первой опорной линии и второй опорной линии и фактической длиной по меньшей мере одной из первой опорной линии и второй опорной линии; и
– определение смещение контейнера по глубине по соотношению.
[0098] В соответствии с вариантом осуществления способа по шестому аспекту способ дополнительно включает в себя корректировку определенного объема текучего вещества на основании соотношения.
[0099] Следует отметить, что любой вариант осуществления способа в соответствии с шестым аспектом, описанный выше, можно комбинировать с одним или более дополнительными вариантами осуществления способа в соответствии с шестым аспектом, описанным выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0100] Дополнительно следует отметить, что любые особенности, функции, характеристики и/или элементы системы в соответствии с пятым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики, стадии и/или элементы способа в соответствии с шестым аспектом, описанным выше и далее. И наоборот, любые особенности, функции, характеристики, стадии и/или элементы способа в соответствии с шестым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики и/или элементы системы в соответствии с пятым аспектом, описанным выше и далее.
[0101] В соответствии с седьмым аспектом описания предложен компьютерный программный элемент, который при исполнении на вычислительном устройстве системы оценки текучего вещества подает вычислительному устройству и/или системе инструкцию на выполнение стадий способа в соответствии с шестым аспектом.
[0102] В соответствии с восьмым аспектом описания предложен невременный машиночитаемый носитель, на котором хранится компьютерный программный элемент в соответствии с седьмым аспектом.
[0103] В соответствии с девятым аспектом описания предложена система оценки текучего вещества. Система в соответствии с девятым аспектом может относиться к системе контроля концентрации частиц, как описано в качестве примера со ссылкой на Фиг. 69–79, к системе определения объема, как описано в качестве примера со ссылкой, например, на Фиг. 5–15, к системе генерации корреляционных данных, как описано в качестве примера со ссылкой на Фиг. 8–21, и/или к устройству определения остаточного объема в реакционном сосуде, как описано в качестве примера со ссылкой на Фиг. 32–34.
[0104] Система в соответствии с девятым аспектом содержит несущее устройство для контейнеров, выполненное с возможностью поддержания и/или удержания одного или более контейнеров, устройство пипетирования образцов и/или устройство пипетирования вещества, выполненное с возможностью дозирования текучего вещества в по меньшей мере один из контейнеров на несущем устройстве для контейнеров, устройство захвата изображения, выполненное с возможностью захвата изображения по меньшей мере одного из контейнеров на несущем устройстве для контейнеров, и по меньшей мере одно устройство обработки и/или по меньшей мере одно вычислительное устройство. В этом случае система выполнена с возможностью:
– дозирования по меньшей мере одного текучего вещества в контейнер с использованием устройства пипетирования образца;
– захвата изображения контейнера на несущем устройстве для контейнеров с использованием устройства захвата изображения;
– анализа изображения контейнера для определения объема по меньшей мере одного текучего вещества, дозированного в контейнер, с использованием по меньшей мере одного устройства обработки; и
– анализа изображения контейнера для определения концентрации частиц в общем объеме текучих веществ в контейнере с использованием по меньшей мере одного устройства обработки.
[0105] Система может содержать по меньшей мере один машиночитаемый носитель данных, на котором хранятся программные инструкции, которые при исполнении по меньшей мере одним устройством обработки приводят к тому, что система:
– дозирует одно или более текучих веществ в контейнер;
– получает изображение контейнера на несущем устройстве для контейнеров;
– анализирует изображение контейнера для определения объема дозированных текучих веществ в контейнере; и
– анализирует изображение контейнера для определения концентрации частиц в общем объеме текучих веществ в контейнере
[0106] В соответствии с вариантом осуществления системы по девятому аспекту общий объем текучих веществ содержит по меньшей мере одну физиологическую жидкость и/или по меньшей мере один реагент.
[0107] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– захватывает и/или получает с использованием устройства захвата изображения первое изображение контейнера после дозирования реагента к по меньшей мере одному текучему веществу, содержащемуся в контейнере, причем по меньшей мере одно текучее вещество включает в себя по меньшей мере одну физиологическую жидкость;
– захватывает и/или получает с использованием устройства захвата изображения второе изображение контейнера после смешивания добавленного реагента с по меньшей мере одним жидким веществом в контейнере;
– анализирует первое изображение контейнера для определения объема дозированного реагента в контейнере с использованием по меньшей мере одного устройства обработки; и
– анализирует второе изображение контейнера для определения концентрации частиц в общем объеме текучих веществ в контейнере с использованием по меньшей мере одного устройства обработки.
[0108] В соответствии с вариантом осуществления системы по девятому аспекту концентрация частиц включает в себя концентрацию парамагнитных частиц.
[0109] В соответствии с вариантом осуществления системы по девятому аспекту по меньшей мере один реагент включает в себя хемилюминесцентный субстрат.
[0110] В соответствии с вариантом осуществления системы по девятому аспекту первое изображение захватывают через приблизительно 0,2 секунды после дозирования реагента в контейнер, причем второе изображение захватывают через приблизительно 6,5 секунды перемешивания.
[0111] В соответствии с вариантом осуществления системы по девятому аспекту устройство захвата изображения установлено на несущем устройстве для контейнеров, а устройство захвата изображения выполнено и/или размещено с возможностью захвата изображения контейнера сбоку от контейнера.
[0112] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно содержит источник света, причем источник света и устройство захвата изображения установлены на несущем устройстве для контейнеров так, что источник света расположен напротив устройства захвата изображения.
[0113] В соответствии с вариантом осуществления системы по девятому аспекту несущее устройство для контейнеров представляет собой промывочное колесо, содержащее поворотную платформу, причем поворотная платформа выполнена с возможностью поворота контейнера к устройству захвата изображения.
[0114] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система определяет, присутствует ли контейнер на несущем устройстве для контейнеров, например, с помощью соответствующих аппаратных и/или программных средств.
[0115] В соответствии с вариантом осуществления системы по девятому аспекту по меньшей мере одно устройство обработки выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– определяет и/или идентифицирует опорную точку на изображении, причем опорная точка связана с контейнером;
– определяет и/или идентифицирует уровень поверхности по меньшей мере одного текучего вещества внутри контейнера по изображению;
– определяет и/или измеряет расстояние между опорной точкой и уровнем поверхности; и
– преобразует расстояние в объем дозированного по меньшей мере одного текучего вещества и/или реагента на основании корреляционных данных, при этом корреляционные данные включают в себя информацию о корреляции между объемами внутри контейнера и расстояниями от опорной точки до множества уровней поверхности внутри контейнера.
[0116] В соответствии с вариантом осуществления системы по девятому аспекту определение и/или идентификация опорной точки включает в себя определение и/или идентификацию нижней части контейнера.
[0117] В соответствии с вариантом осуществления системы по девятому аспекту расстояние измеряется в пикселях.
[0118] В соответствии с вариантом осуществления системы по девятому аспекту устройство обработки выполнено с возможностью определения опорной точки на основании соответствия шаблону и/или на основании сегментирования захваченного изображения.
[0119] В соответствии с вариантом осуществления системы по девятому аспекту устройство обработки выполнено с возможностью поиска шаблона, представляющего опорную точку, на захваченном изображении.
[0120] В соответствии с вариантом осуществления системы по девятому аспекту устройство обработки выполнено с возможностью сравнения по меньшей мере части захваченного изображения с эталонным изображением.
[0121] В соответствии с вариантом осуществления системы по девятому аспекту устройство обработки выполнено с возможностью определения коэффициента соответствия, балльной оценки соответствия и/или корреляционного значения для части захваченного изображения и эталонного изображения.
[0122] В соответствии с вариантом осуществления системы по девятому аспекту устройство пипетирования образца выполнено с возможностью аспирации жидкости в дополнительный контейнер, причем система выполнена с возможностью определения объема аспирированной жидкости, при этом блок захвата изображения выполнен с возможностью захвата дополнительного изображения дополнительного контейнера и при этом устройство обработки выполнено с возможностью определения расстояния до опорной точки на изображении, связанной с дополнительным контейнером, и выполнено с возможностью определения объема по определенному расстоянию в пикселях.
[0123] В соответствии с вариантом осуществления системы по девятому аспекту устройство обработки выполнено с возможностью генерации корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
[0124] В соответствии с вариантом осуществления системы по девятому аспекту корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов жидкости, аспирированной в дополнительный контейнер.
[0125] В соответствии с вариантом осуществления системы по девятому аспекту аспирированная жидкость содержит раствор красителя. Альтернативно или дополнительно система выполнена с возможностью определения объема аспирированной жидкости на основании спектрофотометрии.
[0126] В соответствии с вариантом осуществления системы по девятому аспекту система выполнена с возможностью определения массы аспирированной жидкости и определения объема аспирированной жидкости на основании определенной массы аспирированной жидкости.
[0127] В соответствии с вариантом осуществления системы по девятому аспекту по меньшей мере одно устройство обработки дополнительно выполнено с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– получает и/или определяет яркость общего объема текучих веществ по изображению контейнера, например, на основании получения значения яркости от датчика и/или, например, на основании обработки изображения;
– определяет концентрацию частиц в общем объеме текучих веществ на основе яркости текучего вещества и калибровочных данных;
– сравнивает определенную концентрацию частиц с пороговым значением; и
– в ответ на определение того, что определенная концентрация частиц находится ниже порогового значения, устанавливает флаг для контейнера, содержащего весь объем текучих веществ.
[0128] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– аспирирует с использованием устройства пипетирования образца по меньшей мере часть текучего вещества из контейнера;
– захватывает третье изображение по меньшей мере части контейнера с использованием устройства захвата изображения;
– сравнивает третье изображение с эталонным изображением с использованием по меньшей мере одного устройства обработки;
– определяет балльную оценку соответствия на основании сходства между третьим изображением и эталонным изображением с использованием по меньшей мере одного устройства обработки; и
– сравнивает сгенерированную балльную оценку соответствия с пороговым значением.
[0129] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система определяет интересующую область на третьем изображении с использованием по меньшей мере одного устройства обработки, причем сравнение третьего изображения включает в себя сравнение интересующей области третьего изображения с по меньшей мере частью эталонного изображения.
[0130] В соответствии с вариантом осуществления системы по девятому аспекту интересующая область содержит область, смежную с нижней частью контейнера.
[0131] В соответствии с вариантом осуществления системы по девятому аспекту система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– если балльная оценка соответствия равна пороговому значению и/или ниже него, отмечает флажком результат аспирации из контейнера, и/или
– если балльная оценка соответствия не превышает пороговое значение, отмечает флажком результат аспирации из контейнера.
[0132] В соответствии с вариантом осуществления системы по девятому аспекту несущее устройство для контейнеров содержит множество прорезей для контейнеров, причем каждая прорезь для контейнера выполнена с возможностью поддержки контейнера и причем система дополнительно выполнена с возможностью и/или программные инструкции дополнительно приводят к тому, что система:
– захватывает с использованием устройства захвата изображения четвертое изображение одной из множества прорезей для контейнеров в первом положении несущего устройства для контейнеров;
– сравнивает с использованием по меньшей мере одного устройства обработки четвертое изображение с эталонным изображением;
– получает балльную оценку соответствия с использованием по меньшей мере одного устройства обработки на основании сходства между четвертым изображением и эталонным изображением; и
– сравнивает балльную оценку соответствия с пороговым значением.
[0133] В соответствии с вариантом осуществления системы по девятому аспекту балльная оценка соответствия, превышающая и/или равная пороговому значению, отражает отсутствие контейнера в одном из множества прорезей для контейнеров.
[0134] В соответствии с вариантом осуществления системы по девятому аспекту система выполнена с возможностью удаления контейнера из одной из множества прорезей для контейнеров, когда балльная оценка соответствия ниже порогового значения, и/или программные инструкции дополнительно приводят к тому, что система, когда балльная оценка не удовлетворяет пороговому значению, удаляет контейнер из одной из множества прорезей для контейнеров.
[0135] В соответствии с вариантом осуществления системы по девятому аспекту система выполнена с возможностью перемещения несущего устройства для контейнеров во второе положение после и/или в ответ на определение того, что балльная оценка соответствия превышает и/или равна пороговому значению. Альтернативно или дополнительно программные инструкции дополнительно приводят к тому, что система после определения того, что балльная оценка соответствия превышает пороговое значение, перемещает несущее устройство для контейнеров во второе положение.
[0136] Следует отметить, что любой вариант осуществления системы в соответствии с девятым аспектом, описанный выше, может быть скомбинирован с одним или более дополнительными вариантами осуществления системы в соответствии с девятым аспектом, описанным выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0137] В соответствии с десятым аспектом описания предложен способ оценки текучего вещества в контейнере. Способ в соответствии с десятым аспектом может относиться к способу функционирования системы контроля концентрации частиц, как описано в качестве примера со ссылкой на Фиг. 69–79, и/или к способу функционирования системы определения объема, как описано в качестве примера со ссылкой на Фиг. 5–15.
[0138] Способ по десятому аспекту включает в себя стадии:
– дозирования по меньшей мере одного текучего вещества в контейнер с использованием устройства пипетирования образца;
– захвата и/или получения изображения по меньшей мере части контейнера, размещенного на несущем устройстве для контейнеров, с использованием устройства захвата изображения, причем несущее устройство для контейнеров выполнено с возможностью поддержки и/или удержания одного или более контейнеров;
– анализа изображения контейнера с использованием по меньшей мере одного вычислительного устройства для определения объема по меньшей мере одного дозированного текучего вещества в контейнере; и
– анализа изображения контейнера с использованием по меньшей мере одного вычислительного устройства для определения концентрации частиц в общем объеме текучих веществ в контейнере.
В настоящем документе термин «общий объем текучих веществ» может относиться к по меньшей мере одному дозированному текучему веществу и необязательно к по меньшей мере одному добавленному реагенту.
[0139] В соответствии с вариантом осуществления способа по десятому аспекту захват и/или получение изображения контейнера включает в себя:
– захват и/или получение с использованием устройства захвата изображения первого изображения контейнера после дозирования реагента к по меньшей мере одному текучему веществу, содержащемуся в контейнере, причем по меньшей мере одно текучее вещество включает в себя по меньшей мере одну физиологическую жидкость;
– захват и/или получение с использованием устройства захвата изображения второго изображения контейнера после добавления и/или перемешивания реагента, например, добавленного реагента, с по меньшей мере одним жидким веществом в контейнере.
В этом случае анализ изображения контейнера для определения объема по меньшей мере одного дозированного текучего вещества включает в себя анализ первого изображения контейнера для определения объема дозированного реагента, содержащегося в контейнере, причем анализ изображения контейнера для определения концентрации частиц в общем объеме текучих веществ включает в себя анализ второго изображения контейнера для определения концентрации частиц в общем объеме текучих веществ в контейнере.
[0140] Следует отметить, что любой вариант осуществления способа в соответствии с десятым аспектом, описанный выше, можно комбинировать с одним или более дополнительными вариантами осуществления способа в соответствии с десятым аспектом, описанным выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0141] Дополнительно следует отметить, что любые особенности, функции, характеристики и/или элементы системы в соответствии с десятым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики, стадии и/или элементы способа в соответствии с десятым аспектом, описанным выше и далее. И наоборот, любые особенности, функции, характеристики, стадии и/или элементы способа в соответствии с десятым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики и/или элементы системы в соответствии с девятым аспектом, описанным выше и далее.
[0142] В соответствии с одиннадцатым аспектом описания предложен компьютерный программный элемент, который при исполнении на вычислительном устройстве системы оценки текучего вещества подает вычислительному устройству и/или системе инструкции на выполнение стадий способа в соответствии с десятым аспектом.
[0143] В соответствии с двенадцатым аспектом описания предложен невременный машиночитаемый носитель, на котором хранится компьютерный программный элемент в соответствии с одиннадцатым аспектом.
[0144] В соответствии с тринадцатым аспектом описания предложен способ оценки текучего вещества в контейнере. Способ по тринадцатому аспекту может относиться к способу функционирования системы определения объема, как описано в качестве примера со ссылкой на Фиг. 5–15, способу функционирования системы корректировки дозирования, как описано в качестве примера со ссылкой на Фиг. 35–36, способу функционирования системы генерации корреляционных данных, как описано в качестве примера со ссылкой на Фиг. 8–21, и/или к способу функционирования устройства определения остаточного объема, как описано в качестве примера со ссылкой на Фиг. 32–34.
[0145] Способ по тринадцатому аспекту включает в себя стадии:
– дозирования текучего вещества в контейнер с использованием устройства дозирования вещества;
– определения и/или измерения объема текучего вещества в контейнере с использованием по меньшей мере одного вычислительного устройства;
– приема оперативной информации от устройства дозирования вещества, причем оперативная информация включает в себя рабочие параметры устройства дозирования текучего вещества;
– приема информации о целевом объеме дозирования текучего вещества;
– сравнения определенного объема текучего вещества с целевым объемом дозирования;
– генерации информации для калибровки устройства дозирования вещества; и
– корректировки рабочих параметров устройства дозирования вещества на основании калибровочной информации.
[0146] В соответствии с вариантом осуществления способа по тринадцатому аспекту определение и/или измерение объема текучего вещества включает в себя:
– захват изображения по меньшей мере части контейнера с использованием устройства захвата изображения;
– идентификацию опорной точки на изображении с использованием по меньшей мере одного вычислительного устройства, причем опорная точка связана с контейнером;
– идентификацию уровня поверхности текучего вещества внутри контейнера на изображении с использованием по меньшей мере одного вычислительного устройства;
– определение расстояния между опорной точкой и уровнем поверхности; и
– преобразование расстояния в объем текучего вещества на основании корреляционных данных, причем корреляционные данные включают в себя информацию о корреляции между объемами внутри контейнера и расстояниями от опорной точки до множества уровней поверхности внутри контейнера.
[0147] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя:
– подачу жидкости в дополнительный контейнер;
– определение объема поданной жидкости;
– захват дополнительного изображения контейнера;
– определение в пикселях расстояния до опорной точки на изображении, связанной с дополнительным контейнером; и
– сопоставление определенного объема с определенным расстоянием в пикселях.
[0148] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя генерацию корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
[0149] В соответствии с вариантом осуществления способа по тринадцатому аспекту корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов жидкости, поданных в дополнительный контейнер.
[0150] В соответствии с вариантом осуществления способа по тринадцатому аспекту поданная жидкость содержит раствор красителя. Альтернативно или дополнительно объем поданной жидкости определяют на основании спектрофотометрии.
[0151] В соответствии с вариантом осуществления способа по тринадцатому аспекту определение объема поданной жидкости включает в себя определение массы поданной жидкости.
[0152] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя:
– аспирацию по меньшей мере части текучего вещества из контейнера;
– захват изображения по меньшей мере части контейнера с использованием устройства захвата изображения;
– сравнение изображения с эталонным изображением;
– генерацию балльной оценки соответствия на основании сходства между изображением и эталонным изображением.
[0153] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя:
– сравнение балльной оценки соответствия с пороговым значением; и/или
– определение того, что балльная оценка соответствия превышает пороговое значение.
[0154] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя определение интересующей области изображения, причем сравнение изображения включает в себя сравнение интересующей области на изображении с по меньшей мере частью эталонного изображения.
[0155] В соответствии с вариантом осуществления способа по тринадцатому аспекту интересующая область включает в себя область, смежную с нижней частью контейнера.
[0156] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя установку флага результата аспирации из контейнера, если балльная оценка соответствия равна и/или ниже порогового значения.
[0157] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя:
– размещение множества контейнеров во множестве прорезей для контейнеров несущего устройства для контейнеров;
– захват изображения одной из множества прорезей для контейнеров в первом положении несущего устройства для контейнеров с использованием устройства захвата изображения;
– сравнение изображения с эталонным изображением;
– генерацию балльной оценки соответствия на основании сходства между изображением и эталонным изображением.
[0158] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя:
– сравнение балльной оценки соответствия с пороговым значением; и/или
– определение того, что балльная оценка соответствия больше и/или равна пороговому значению, причем балльная оценка соответствия, превышающая пороговое значение, отражает отсутствие контейнера в одной из множества прорезей для контейнеров.
[0159] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя удаление контейнера из одной из множества прорезей для контейнеров, когда балльная оценка соответствия ниже порогового значения.
[0160] В соответствии с вариантом осуществления способа по тринадцатому аспекту способ дополнительно включает в себя перемещение несущего устройства для контейнеров во второе положение после определения того, что балльная оценка соответствия больше и/или равна пороговому значению.
[0161] Следует отметить, что любой вариант осуществления способа в соответствии с тринадцатым аспектом, описанный выше, можно комбинировать с одним или более дополнительными вариантами осуществления способа в соответствии с тринадцатым аспектом, описанным выше. Это может обеспечить особенно благоприятные синергетические эффекты.
[0162] Дополнительно следует отметить, что любые особенности, функции, характеристики и/или элементы системы в соответствии с девятым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики, стадии и/или элементы способа в соответствии с тринадцатым аспектом, описанным выше и далее. И наоборот, любые особенности, функции, характеристики, стадии и/или элементы способа в соответствии с тринадцатым аспектом, описанным выше и далее, могут представлять собой особенности, функции, характеристики и/или элементы системы в соответствии с девятым аспектом, описанным выше и далее.
[0163] В соответствии с четырнадцатым аспектом описания предложен компьютерный программный элемент, который при исполнении на вычислительном устройстве системы оценки текучего вещества подает вычислительному устройству и/или системе инструкции на выполнение стадий способа в соответствии с тринадцатым аспектом.
[0164] В соответствии с пятнадцатым аспектом описания предложен невременный машиночитаемый носитель, на котором хранится компьютерный программный элемент в соответствии с четырнадцатым аспектом.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0165] На ФИГ. 1 представлена блок–схема примера прибора для анализа биологической пробы.
[0166] На ФИГ. 2 схематично проиллюстрирован пример прибора для анализа биологической пробы, изображенного на ФИГ. 1.
[0167] На ФИГ. 3 проиллюстрирован пример архитектуры вычислительного устройства, которое может использоваться для реализации аспектов настоящего описания.
[0168] На ФИГ. 4 представлена принципиальная схема, иллюстрирующая пример способа иммунологического анализа.
[0169] На ФИГ. 5 представлена блок–схема примера системы определения объема, изображенной на ФИГ. 1.
[0170] На ФИГ. 6 представлена функциональная схема, иллюстрирующая пример способа функционирования системы определения объема.
[0171] На ФИГ. 7 представлена функциональная схема, иллюстрирующая пример способа осуществления функционирования системы определения объема, изображенной на ФИГ. 6.
[0172] На ФИГ. 8 представлена функциональная схема, иллюстрирующая пример способа функционирования системы генерации корреляционных данных для генерации корреляционных данных.
[0173] На ФИГ. 9 проиллюстрирован пример устройства определения объема дозирующего наконечника, изображенного на ФИГ. 5.
[0174] На ФИГ. 10 схематически проиллюстрирован пример конструкции системы аспирации образцов в соединении с устройством определения объема дозирующего наконечника.
[0175] На ФИГ. 11 представлен вид в перспективе системы аспирации образцов, изображенной на ФИГ. 10.
[0176] На ФИГ. 12A представлен вид сбоку системы аспирации образцов, изображенной на ФИГ. 10.
[0177] На ФИГ. 12B представлен другой вид сбоку системы аспирации образцов, изображенной на ФИГ. 10.
[0178] На ФИГ. 13 представлен схематический вид в перспективе примера дозирующего наконечника.
[0179] На ФИГ. 14 представлен вид в поперечном сечении дистального конца дозирующего наконечника, изображенного на ФИГ. 13.
[0180] На ФИГ. 15 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства определения объема дозирующего наконечника.
[0181] На ФИГ. 16 представлена функциональная схема, иллюстрирующая пример способа осуществления функционирования устройства определения объема дозирующего наконечника, изображенного на ФИГ. 15.
[0182] На ФИГ. 17 проиллюстрирован пример анализа захваченного изображения дозирующего наконечника.
[0183] На ФИГ. 18 проиллюстрирован анализ захваченного изображения, изображенного на ФИГ. 17.
[0184] На ФИГ. 19 проиллюстрирован анализ захваченного изображения, изображенного на ФИГ. 17.
[0185] На ФИГ. 20 представлен пример корреляционной кривой, соответствующей корреляционным данным по объемам наконечников.
[0186] На ФИГ. 21 представлена функциональная схема, иллюстрирующая пример способа функционирования системы генерации корреляционных данных по объемам наконечников для генерации корреляционных данных по объемам наконечников.
[0187] На ФИГ. 22 проиллюстрирован пример устройства определения объема сосуда, изображенного на ФИГ. 5.
[0188] На ФИГ. 23 проиллюстрирован пример несущего устройства для контейнеров, в которое встроено устройство определения объема сосуда.
[0189] На ФИГ. 24 представлен другой вид в перспективе несущего устройства для контейнеров, изображенного на ФИГ. 23, иллюстрирующий блок захвата изображения сосуда, изображенный на ФИГ. 23.
[0190] На ФИГ. 25 представлен вид сверху промывочного колеса с устройством определения объема сосуда, включающим в себя блок захвата изображения сосуда.
[0191] На ФИГ. 26 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства определения объема сосуда с промывочным колесом.
[0192] На ФИГ. 27 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства определения объема дозирования в реакционный сосуд устройства определения объема сосуда.
[0193] На ФИГ. 28 представлена функциональная схема, иллюстрирующая пример способа осуществления функционирования устройства определения объема дозирования в реакционный сосуд, изображенного на ФИГ. 27.
[0194] На ФИГ. 29 проиллюстрирован пример анализа захваченного изображения реакционного сосуда.
[0195] На ФИГ. 30 представлен пример корреляционной кривой, соответствующей корреляционным данным по объемам сосудов.
[0196] На ФИГ. 31 представлена функциональная схема, иллюстрирующая пример способа функционирования системы генерации корреляционных данных по объемам сосудов для генерации корреляционных данных по объемам сосудов.
[0197] На ФИГ. 32 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства определения остаточного объема в реакционном сосуде устройства определения объема сосуда.
[0198] На ФИГ. 33 представлена функциональная схема, иллюстрирующая пример способа осуществления функционирования устройства определения остаточного объема в реакционном сосуде, изображенного на ФИГ. 32.
[0199] На ФИГ. 34 проиллюстрирован пример анализа захваченного изображения сосуда.
[0200] На ФИГ. 35 представлена блок–схема примера системы, в которой функционирует устройство корректировки дозирования устройства определения объема сосуда.
[0201] На ФИГ. 36 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства корректировки дозирования, изображенного на ФИГ. 35.
[0202] На ФИГ. 37 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства обнаружения реакционного сосуда устройства определения объема сосуда.
[0203] На ФИГ. 38 представлена функциональная схема, иллюстрирующая пример способа осуществления функционирования устройства обнаружения реакционного сосуда, изображенного на ФИГ. 37.
[0204] На ФИГ. 39 проиллюстрирован пример анализа захваченного изображения прорези для сосуда на промывочном колесе.
[0205] На ФИГ. 40 представлена блок–схема примера системы оценки целостности, изображенной на ФИГ. 1.
[0206] На ФИГ. 41 представлена блок–схема примера устройства оценки целостности в дозирующем наконечнике, изображенного на ФИГ. 40.
[0207] На ФИГ. 42 представлен пример устройства определения качества образца.
[0208] На ФИГ. 43 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства определения качества образца, изображенного на ФИГ. 42.
[0209] На ФИГ. 44 представлена функциональная схема, иллюстрирующая пример способа функционирования устройства оценки изображения, изображенного на ФИГ. 42.
[0210] На ФИГ. 45 проиллюстрирован пример анализа захваченного изображения.
[0211] На ФИГ. 46 представлена функциональная схема, иллюстрирующая пример способа нахождения интересующей области на изображении.
[0212] На ФИГ. 47 представлена функциональная схема примера способа получения цветовых параметров для изображения.
[0213] На ФИГ. 48 проиллюстрирован пример гистограммы для изображения.
[0214] На ФИГ. 49 представлена функциональная схема примера способа функционирования устройства генерации классификационных данных, изображенного на ФИГ. 42.
[0215] На ФИГ. 50 представлен пример таблицы значений мешающих компонентов, преобразованных в классификационные метки.
[0216] На ФИГ. 51 представлен пример набора классификационных идентификаторов образцов.
[0217] На ФИГ. 52 проиллюстрирован пример таблицы данных цветовых параметров для трех мешающих компонентов.
[0218] На ФИГ. 53 показан пример набора классификаторов образцов из комбинаций первого, второго и третьего мешающих компонентов, показанных на ФИГ. 52.
[0219] На ФИГ. 54 представлена блок–схема, схематически иллюстрирующая пример классифицирующего устройства, изображенного на ФИГ. 42.
[0220] На ФИГ. 55 представлен пример набора данных результатов классификации образцов и связанных с ними отмеченных флагом результатов.
[0221] На ФИГ. 56 представлена блок–схема примера устройства определения выравнивания наконечника.
[0222] На ФИГ. 57 представлен вид в поперечном разрезе примера дозирующего наконечника, на котором проиллюстрированы возможные допуски в дозирующем наконечнике.
[0223] На ФИГ. 58 схематично проиллюстрирован пример смещения дозирующего наконечника.
[0224] На ФИГ. 59 проиллюстрированы возможные типы смещения дозирующего наконечника.
[0225] На ФИГ. 60A представлен вид сбоку в поперечном сечении примера дозирующего наконечника, пригодного для использования с устройством определения выравнивания наконечника.
[0226] На ФИГ. 60B представлен развернутый вид части дозирующего наконечника, изображенного на ФИГ. 60A.
[0227] На ФИГ. 60C представлен развернутый вид части дозирующего наконечника, изображенного на ФИГ. 60A.
[0228] На ФИГ. 61 представлена функциональная схема, иллюстрирующая пример способа оценки выравнивания дозирующего наконечника.
[0229] На ФИГ. 62 представлена функциональная схема, иллюстрирующая пример способа определения смещения дозирующего наконечника.
[0230] На ФИГ. 63 представлена функциональная схема, иллюстрирующая другой пример способа определения смещения дозирующего наконечника.
[0231] На ФИГ. 64 схематично проиллюстрирован пример изображения, показывающего боковое смещение дозирующего наконечника.
[0232] На ФИГ. 65 представлена функциональная схема, иллюстрирующая пример способа коррекции объема с использованием второй опорной линии.
[0233] На ФИГ. 66 представлена функциональная схема, иллюстрирующая другой пример способа коррекции объема с использованием второй опорной линии.
[0234] На ФИГ. 67 схематично проиллюстрировано смещение дозирующего наконечника по глубине по отношению к блоку камеры.
[0235] На ФИГ. 68 представлен пример таблицы данных определения объема до и после коррекции, выполненной устройством определения выравнивания наконечника.
[0236] На ФИГ. 69 представлена блок–схема примера системы контроля концентрации частиц, изображенной на ФИГ. 1.
[0237] На ФИГ. 70 показаны примеры изображений реакционного сосуда с различными концентрациями частиц.
[0238] На ФИГ. 71 представлена блок–схема примера системы контроля концентрации частиц в реакционном сосуде.
[0239] На ФИГ. 72 представлена функциональная схема, иллюстрирующая пример способа измерения концентрации частиц в текучем веществе, содержащемся в реакционном сосуде.
[0240] На ФИГ. 73 представлена функциональная схема, иллюстрирующая пример способа генерации калибровочных данных.
[0241] На ФИГ. 74 представлена таблица примеров веществ, используемых для генерации калибровочных данных.
[0242] На ФИГ. 75 показаны примеры калибровочных кривых, построенных на основании калибровочных данных.
[0243] На ФИГ. 76 представлена функциональная схема, иллюстрирующая пример способа измерения концентрации частиц в текучем веществе, содержащемся в реакционном сосуде.
[0244] На ФИГ. 77 представлен пример таблицы примеров пороговых значений концентраций разных анализируемых веществ.
[0245] На ФИГ. 78 представлена функциональная схема примера функции диагностики, в которой используются функции системы контроля концентрации частиц в реакционном сосуде.
[0246] На ФИГ. 79 представлена функциональная схема другого примера функции диагностики, изображенной на ФИГ. 78.
ПОДРОБНОЕ ОПИСАНИЕ
[0247] Различные варианты осуществления будут подробно описаны со ссылкой на чертежи, причем одинаковые номера позиций представляют одинаковые детали и узлы на нескольких видах. Ссылки на различные варианты осуществления не ограничивают объем приложенных к настоящему документу пунктов формулы изобретения. Кроме того, предполагается, что любые примеры, изложенные в настоящем описании, не являются ограничивающими и представляют лишь некоторые из многих возможных вариантов осуществления приложенной формулы изобретения.
[0248] На ФИГ. 1 представлена блок–схема примера прибора 100 для анализа биологической пробы. В некоторых вариантах осуществления прибор 100 включает в себя систему 102 подготовки вещества, систему 104 оценки подготовки и систему 106 оценки вещества. С системами прибора 100 используются один или более контейнеров 110, к которым относятся дозирующие наконечники 112 и сосуды 114. Также показаны одно или более несущих устройств 116 для контейнеров, которые предусмотрены в приборе 100. Дополнительно система 104 оценки подготовки включает в себя систему 120 определения объема, систему 122 оценки дозирующих наконечников и систему 126 обнаружения несущего устройства. В некоторых вариантах осуществления система 120 определения объема использует блок 130 захвата изображения дозирующего наконечника и блок 132 захвата изображения сосуда. В некоторых вариантах осуществления система 122 оценки дозирующих наконечников использует блок 130 захвата изображения дозирующего наконечника, а система 124 контроля концентрации частиц использует блок 132 захвата изображения сосуда. В некоторых вариантах осуществления система 126 обнаружения несущего устройства использует блок 134 захвата изображения несущего устройства.
[0249] Следует отметить, что каждая из систем оценки текучего вещества в соответствии с четвертым аспектом, пятым аспектом и/или девятым аспектом, как описано в разделе резюме настоящего описания, может относиться к прибору 100 для анализа биологической пробы и/или каждая может относиться к одному или более компонентам и/или устройствам прибора 100. Дополнительно каждый из способов оценки текучего вещества в соответствии с первым аспектом, шестым аспектом, десятым аспектом и/или тринадцатым аспектом, как описано в разделе резюме настоящего описания, может относиться к способу функционирования прибора 100 и/или каждый может относиться к способу функционирования одного или более компонентов и/или устройств прибора 100.
[0250] Прибор 100 для анализа биологической пробы функционирует с возможностью анализа биологической пробы для различных целей. В некоторых вариантах осуществления прибор 100 для анализа биологической пробы выполнен с возможностью анализа образца крови и функционирует с возможностью забора, исследования, обработки, хранения и/или переливания крови и ее компонентов.
[0251] Система 102 подготовки вещества функционирует с возможностью подготовки одного или более веществ для дальнейшего анализа с помощью системы 106 оценки вещества. В некоторых вариантах осуществления система 102 подготовки вещества функционирует с возможностью взятия аликвот веществ 118 с использованием контейнеров 110, аспирации веществ 118 из контейнеров 110 и дозирования веществ 118 в контейнеры 110.
[0252] Система 104 оценки подготовки функционирует с возможностью оценки подготовки веществ для последующего анализа системой 106 оценки веществ. В некоторых вариантах осуществления система 104 оценки подготовки использует один или более блоков захвата изображения для определения того, были ли вещества 118 надлежащим образом подготовлены для анализа. Как описано в настоящем документе, система 104 оценки подготовки обеспечивает прямые и простые измерения объема или целостности вещества 118 для определения того, подготовлено ли вещество 118 надлежащим образом, чтобы система 106 оценки вещества обеспечивала надежный результат с использованием вещества 118.
[0253] Система 106 оценки вещества функционирует с возможностью оценки вещества 118, подготовленного системой 102 подготовки вещества. В качестве примера, система 106 оценки вещества выполняет иммуноанализ, как описано со ссылкой на ФИГ. 2.
[0254] Контейнеры 110 используются для подготовки одного или более веществ 118 для анализа системой 106 оценки вещества. Контейнеры 110 могут быть различных типов, таких как пробирки для проб (в настоящем документе также называемые пробирками для образцов), наконечники для пипетирования и сосуды. В некоторых вариантах осуществления контейнеры 110 включают в себя дозирующие наконечники 112 и сосуды 114.
[0255] Дозирующие наконечники 112 подаются в систему 102 подготовки вещества для взятия аликвот или аспирации веществ 118 из других контейнеров, таких как сосуды 114. Например, дозирующие наконечники 112 используются для взятия аликвот образцов из пробирок для проб или для аспирации образцов или реагентов из сосудов для образцов или сосудов для реагентов. Пример дозирующего наконечника 112 более подробно описан и проиллюстрирован со ссылкой на ФИГ. 13 и 14.
[0256] Сосуды 114 подаются в систему 102 подготовки вещества с целью хранения веществ 118 для подготовки и анализа. В некоторых вариантах осуществления система 102 подготовки вещества дозирует вещества 118 в сосуды 114. К примерам сосудов 114 относятся сосуды с образцами, сосуды для разбавителей и реакционные сосуды, которые более подробно описаны в настоящем документе.
[0257] Несущие устройства 116 для контейнеров выполнены с возможностью удержания и транспортировки контейнеров 110 в различных местоположениях в приборе 100, так чтобы система 102 подготовки вещества, система 104 оценки подготовки и система 106 оценки вещества использовали контейнеры 110 различными способами. Примеры несущих устройств 116 для контейнеров включают в себя стойки для сосудов (например, стойка для образцов, стойка для реагентов и стойка для разбавителя), блок поднесения образцов, несущие блоки для сосудов (например, несущий блок для образца, несущий блок для реакционных сосудов и несущий блок для реагентов), блоки перемещения сосудов (например, блок перемещения образца, блок перемещения реагентов, блок перемещения инкубаторов и блок перемещения реакционных сосудов), а также пластины или колеса для удержания сосудов (например, колесо для образцов, инкубатор и промывочное колесо), которые описаны и проиллюстрированы более подробно со ссылкой на ФИГ. 2.
[0258] Вещества 118 готовят, оценивают и анализируют для различных исследований и анализов в приборе 100. К веществам 118 относятся любые вещества, которые могут быть аликвотированы, аспирированы и дозированы в приборе 100. В некоторых вариантах осуществления вещества 118 имеют характеристики текучей среды и, таким образом, в настоящем документе называются текучими веществами. В некоторых вариантах осуществления текучее вещество 118 представляет собой единственное текучее вещество. В других вариантах осуществления текучее вещество 118 представляет собой смесь множества веществ.
[0259] Система 120 определения объема в системе 104 оценки подготовки функционирует с возможностью определения объема текучего вещества 118 в контейнере 110 и определения того, подходит ли объем, хранящийся в контейнере 110, для заданной цели. Как описано в настоящем документе, система 120 определения объема выполнена с возможностью определения объема в дозирующем наконечнике 112 с использованием блока 130 захвата изображения дозирующего наконечника и определения объема в сосуде 114 с использованием блока 132 захвата изображения сосуда.
[0260] Система 122 оценки дозирующих наконечников в системе 104 оценки подготовки функционирует с возможностью оценки целостности текучего вещества 118. В некоторых вариантах осуществления система 122 оценки дозирующих наконечников обнаруживает любые мешающие компоненты, которые могут влиять на процедуру анализа и могут приводить к неправильным результатам. Как описано в настоящем документе, система 122 оценки дозирующих наконечников выполнена с возможностью определения качества текучего вещества 118 в дозирующем наконечнике 112 с использованием блока 130 захвата изображения дозирующего наконечника и выравнивания дозирующего наконечника 112 относительно блока 130 захвата изображения дозирующего наконечника.
[0261] Система 124 контроля концентрации частиц функционирует с возможностью определения концентрации частиц в текучем веществе, содержащемся в сосуде, таком как реакционный сосуд, сосуд с образцом, сосуд для разбавителя, кювета или сосуд любого подходящего типа, который используется на любой стадии процесса в приборе 100. В некоторых вариантах осуществления система 1700 контроля концентрации частиц в реакционном сосуде использует блок 132 захвата изображения сосуда.
[0262] Блок 130 захвата изображения дозирующего наконечника служит для захвата изображений дозирующих наконечников 112 в одном или более местоположениях. В некоторых вариантах осуществления блок 130 захвата изображения дозирующего наконечника зафиксирован в определенном местоположении в приборе 100. В других вариантах осуществления блок 130 захвата изображения дозирующего наконечника размещен с возможностью перемещения в приборе 100 и может перемещаться либо независимо от других компонентов прибора 100, либо вместе с одним или более компонентами прибора 100. Некоторые варианты осуществления прибора 100 включают в себя множество блоков 130 захвата изображения дозирующего наконечника. Как описано в настоящем документе, блок 130 захвата изображения дозирующего наконечника может включать в себя блок 550 камеры (например, ФИГ. 11) и блок 2550 камеры (ФИГ. 11 и 67).
[0263] Блок 132 захвата изображения сосуда функционирует с возможностью захвата изображений сосудов 114 в одном или более местоположениях. В некоторых вариантах осуществления блок 132 захвата изображения сосуда зафиксирован в определенном местоположении в приборе 100. В других вариантах осуществления блок 132 захвата изображения сосуда размещен с возможностью перемещения в приборе 100 и может перемещаться либо независимо от других компонентов прибора 100, либо вместе с одним или более компонентами прибора 100. Некоторые варианты осуществления прибора 100 включают в себя множество блоков 132 захвата изображения сосуда. Как описано в настоящем документе, блок 132 захвата изображения сосуда включает в себя блок 730 камеры (например, ФИГ. 24).
[0264] Блок 134 захвата изображения несущего устройства функционирует с возможностью захвата изображений несущих устройств 116 для контейнеров с контейнерами 110 или без них в одном или более местоположениях. В некоторых вариантах осуществления блок 134 захвата изображения несущего устройства зафиксирован в определенном местоположении в приборе 100. В других вариантах осуществления блок 134 захвата изображения несущего устройства размещен с возможностью перемещения в приборе 100 и может перемещаться либо независимо от других компонентов прибора 100, либо вместе с одним или более компонентами прибора 100. Некоторые варианты осуществления прибора 100 включают в себя множество блоков 134 захвата изображения несущего устройства.
[0265] Как также показано на ФИГ. 1, в некоторых вариантах осуществления прибор 100 функционирует с возможностью обмена данными с системой 136 управления по сети 138 передачи данных. Например, прибор 100 включает в себя устройство связи (такое как устройство 246 связи на ФИГ. 3), через которое прибор 100 обменивается данными с системой 136 управления.
[0266] В некоторых вариантах осуществления система 136 управления расположена удаленно от прибора 100 и выполнена с возможностью выполнения диагностики на основании данных от прибора 100. Кроме того, прибор 100 может оценивать работу прибора и генерировать отчет. Один пример системы 136 управления включает в себя одно или более вычислительных устройств, исполняющих приложение PROSevice Remote Service Application, доступное от компании Beckman Coulter, Inc., г. Брея, штат Калифорния, США.
[0267] Приложение Beckman Coulter PROService Remote Service Application может обеспечивать безопасное и непрерывное соединение между прибором 100 для анализа биологической пробы и удаленным диагностическим центром управления (например, системой управления 136) по сети (например, по сети 138). Прибор 100 для анализа биологических проб может быть подключен к удаленному диагностическому центру управления по сети Интернет через порт Ethernet, Wi–Fi или сотовую сеть.
[0268] Как также показано на ФИГ. 1, сеть 138 передачи данных передает цифровые данные между одним или более вычислительными устройствами, например, между устройством 108 сбора данных и системой 136 обработки данных. К примерам сети 138 относятся локальная сеть и глобальная сеть, такая как Интернет. В некоторых вариантах осуществления сеть 138 включает в себя систему беспроводной связи, систему проводной связи или комбинацию систем беспроводной и проводной связи. Система проводной связи может передавать данные с использованием электрических или оптических сигналов в различных возможных вариантах осуществления. Системы беспроводной связи, как правило, передают сигналы с помощью электромагнитных волн, например, в форме оптических сигналов или радиочастотных (РЧ) сигналов. Система беспроводной связи, как правило, включает в себя оптический или РЧ–передатчик для передачи оптических или РЧ–сигналов и оптический или РЧ–приемник для приема оптических или РЧ–сигналов. Примеры систем беспроводной связи включают в себя устройства связи Wi–Fi (такие как беспроводные маршрутизаторы или беспроводные точки доступа), сотовые устройства связи (например, с использованием одной или более базовых станций сотовой связи) и другие устройства беспроводной связи.
[0269] На ФИГ. 2 схематично проиллюстрирован пример прибора 100 для анализа биологической пробы, изображенного на ФИГ. 1. В проиллюстрированном примере прибор 100 выполнен в виде иммуноанализатора. Как описано выше, прибор 100 включает в себя систему 102 подготовки вещества, систему 104 оценки подготовки и систему 106 оценки вещества. В некоторых вариантах осуществления система 102 подготовки вещества включает в себя платформу 140 подачи образцов, блок 142 поднесения образцов, податчик 144 реакционных сосудов, несущий блок 146 для реакционных сосудов, блок 148 перемещения образца, податчик 150 пипетирующих наконечников, устройство 152 пипетирования образца, колесо 158 для образцов, несущий блок 160 для реагентов, устройство 162 пипетирования реагента, устройство 164 хранения реагента, устройство 166 загрузки реагентов, блок 170 перемещения инкубатора, инкубатор 172, блок перемещения 174 реакционных сосудов, промывочное колесо 176 и устройство 180 загрузки субстрата. В некоторых вариантах осуществления система 106 оценки вещества включает в себя устройство 190 измерения освещенности и устройство 192 обработки оценки. Некоторые варианты осуществления системы 106 оценки вещества дополнительно связаны с по меньшей мере некоторыми операциями, выполняемыми устройством 170 перемещения инкубатора, инкубатором 172, устройством 174 перемещения реакционных сосудов, промывочным колесом 176 и устройством 180 загрузки субстрата.
[0270] Платформа 140 подачи образцов выполнена с возможностью приема множества пробирок для образцов во множестве стоек для образцов. В некоторых вариантах осуществления пользователь (например, лаборант) загружает одну или более стоек с пробирками для образцов на платформу 140 подачи образцов. Платформа 140 подачи образцов может перемещать стойки к блоку 142 поднесения образцов для пипетирования и принимать пропипетированные стойки, возвращенные блоком 142 поднесения образцов, после пипетирования.
[0271] Блок 142 поднесения образцов функционирует с возможностью транспортировки одной или более стоек с пробирками для образцов в заданные местоположения. В некоторых вариантах осуществления платформа 140 подачи образцов выполнена с возможностью подачи одной стойки для образцов к блоку 142 поднесения образцов. Дополнительно блок 142 поднесения образцов может функционировать с возможностью идентификации стойки и идентификатора образца на стойке. Блок 142 поднесения образцов транспортирует стойку в местоположение для пипетирования образцов, в котором пипетки для образцов забирают аликвоты из пробирок с образцами в стойке. Как только пипетка забрала аликвоту из одной из пробирок с образцами в стойке, блок 142 поднесения образцов перемещается к другой пробирке для образца в стойке для следующего пипетирования. После пипетирования всех пробирок для образцов блок 142 поднесения образцов возвращает стойку на платформу 140 подачи образцов. Блок 142 поднесения образцов может включать в себя блок поднесения стоек для образцов. В других вариантах осуществления блок 142 поднесения образцов выполнен с возможностью перемещения шайбы, которая содержит одну пробирку. Следует понимать, что блок 142 поднесения образцов также выполнен с возможностью и используется для других типов контейнеров, таких как чашки или сосуды.
[0272] Податчик 144 реакционных сосудов подает множество реакционных сосудов к несущему блоку 146 для реакционных сосудов. Пользователь может загрузить большое количество новых пустых реакционных сосудов в податчик 144 реакционных сосудов. В некоторых вариантах осуществления податчик 144 реакционных сосудов функционирует с возможностью ориентации реакционных сосудов при подаче реакционных сосудов в несущий блок 146 для реакционных сосудов.
[0273] Несущий блок 146 для реакционных сосудов функционирует с возможностью перемещения реакционных сосудов податчика 144 реакционных сосудов к блоку 148 перемещения образца. В некоторых вариантах осуществления несущий блок 146 для реакционных сосудов забирает один или более реакционных сосудов из податчика 144 реакционных сосудов и переносит реакционные сосуды в блок 148 перемещения образца.
[0274] Блок 148 перемещения образца функционирует с возможностью перемещения пустых реакционных сосудов из несущего блока 146 для реакционных сосудов к колесу 158 для образцов и несущему блоку 160 для реагентов. Дополнительно блок 148 перемещения образца функционирует с возможностью переноса сосудов с аликвотами образцов к несущему блоку 160 для реагентов и перемещения сосудов для образцов от несущего блока 160 для реагентов обратно в колесо 158 для образцов. Блок 148 перемещения образца может дополнительно функционировать с возможностью утилизации сосудов для образцов и сосудов для разбавителей, которые были использованы в ходе заданных процессов.
[0275] Податчик 150 пипетирующих наконечников подает пипетирующие наконечники в устройство 152 пипетирования образцов. В настоящем документе пипетирующие наконечники представляют собой примеры дозирующих наконечников 112 и, таким образом, в настоящем документе также могут называться дозирующими наконечниками 112. В некоторых вариантах осуществления множество пипетирующих наконечников в стойках загружают в матрицу в податчике 150 пипетирующих наконечников. Пипетирующие наконечники перемещаются и зацепляются с устройством 152 пипетирования образцов с целью пипетирования. После использования пипетирующие наконечники отцепляются от устройства 152 пипетирования образцов и отправляются в отходы, а устройство 152 пипетирования образцов может возвращаться к податчику 150 пипетирующих наконечников. Пользователь может утилизировать твердые отходы, в том числе использованные пипетирующие наконечники.
[0276] Устройство 152 пипетирования образцов выполняет различные операции по пипетированию. Устройство 152 пипетирования образцов принимает пипетирующий наконечник из податчика 150 пипетирующих наконечников и зацепляется с пипетирующим наконечником устройства 152 пипетирования образцов. В некоторых вариантах осуществления устройство 152 пипетирования образцов зацепляется с пипетирующим наконечником путем вдавливания сердечника пипетки в пипетирующий наконечник и подъема сердечника пипетки, вошедшего в пипетирующий наконечник. Как описано в настоящем документе, некоторые варианты осуществления пипетирующих наконечников могут быть утилизированы после однократного использования или многократного использования.
[0277] В некоторых вариантах осуществления устройство 152 пипетирования образцов включает в себя пипетирующий блок 152A аликвотирования образца («устройство аликвотирования образца») и блок 152B прецизионного пипетирования образца («устройство прецизионного пипетирования образца»).
[0278] Пипетирующий блок 152A аликвотирования образца используется для пипетирования и взятия аликвоты образца из пробирки для образца, размещенной в блоке 142 поднесения образцов, и дозирования аликвоты образца в сосуд с образцом на колесе 158 для образцов. При завершении пипетирования каждого образца пипетирующий блок аликвотирования образца может утилизировать использованный пипетирующий наконечник. Как описано в настоящем документе, пипетирующий блок 152A аликвотирования образца может включать в себя блок 550 камеры, который дополнительно описан в настоящем документе со ссылкой, например, на ФИГ. 11, 12A и 12B.
[0279] Блок 152B прецизионного пипетирования образца используется для пипетирования образца из сосуда с образцом, размещенного на несущем блоке 160 для реагентов. После этого блок прецизионного пипетирования образца может дозировать образец в реакционный сосуд. В некоторых вариантах осуществления перед дозированием в реакционный сосуд образец можно сначала дозировать в сосуд для разбавления с целью разведения образца (например, при помощи промывочного буфера, предоставляемого устройством 162 пипетирования реагента). Блок прецизионного пипетирования образца может утилизировать использованный пипетирующий наконечник после завершения заданного исследования. Как описано в настоящем документе, блок 152B прецизионного пипетирования может включать в себя блок 2550 камеры, который дополнительно описан в настоящем документе со ссылкой на ФИГ. 11, 12A, 12B и 67.
[0280] В колесе 158 для образцов хранятся аликвоты образцов в сосудах для образцов. В некоторых вариантах осуществления колесо 158 для образцов функционирует с возможностью хранения образцов при пониженной температуре, такой как приблизительно 4-10°C, для уменьшения изменения концентрации аналита при испарении. Сосуды с образцами могут быть перенесены обратно на колесо 158 для образцов после пипетирования реагентов, если запрашиваются дополнительные исследования.
[0281] Несущий блок 160 для реагентов выполнен с возможностью поддержки множества сосудов и перемещения сосудов в разные местоположения. В некоторых вариантах осуществления несущий блок 160 для реагентов выполнен с возможностью удержания множества из четырех сосудов (например, трех или четырех сосудов), которые могут использоваться одновременно для каждой пипетки реагента в устройстве 162 пипетирования реагента. В некоторых вариантах осуществления несущий блок 160 для реагентов имеет температурный контроль от приблизительно 30°C до 40°C. В других вариантах осуществления у несущего блока 160 для реагентов поддерживают температуру приблизительно 37°C для обеспечения протекания, например, ферментативной реакции со стабильной кинетикой.
[0282] В некоторых вариантах осуществления несущий блок 160 для реагентов выполнен с возможностью удержания реакционного сосуда, сосуда для разведения и сосуда с образцом, а также транспортировки сосудов с целью пипетирования образца и пипетирования реагентов. В некоторых вариантах осуществления несущий блок 160 для реагентов включает в себя несущий челнок, выполненный с возможностью перемещения вдоль заданного пути. Например, несущий блок 160 для реагентов перемещается близко к блоку 148 перемещения образца и принимает реакционный сосуд, сосуд для разведения и сосуд с образцом из блока 148 перемещения образца. Дополнительно несущий блок 160 для реагентов может перемещаться к устройству 162 пипетирования реагента для пипетирования реагентов, а также к блоку 152B прецизионного пипетирования образца для пипетирования образца. В некоторых вариантах осуществления несущий блок 160 для реагентов перемещается к блоку 148 перемещения образца для удаления сосуда для разведения и сосуда с образцом и в блок 170 перемещения инкубатора для удаления реакционного сосуда.
[0283] Устройство 162 пипетирования реагентов предназначено для пипетирования реагентов из устройства 164 хранения реагента в реакционные сосуды на несущем блоке 160 для реагентов. В некоторых вариантах осуществления устройство 162 пипетирования реагента включает в себя множество пипеток, которые могут одновременно выполнять пипетирование при разных исследованиях для обеспечения пропускной способности. В некоторых вариантах осуществления устройство 162 пипетирования реагента имеет температурный контроль от приблизительно 30°C до 40°C. В других вариантах осуществления температуру устройства 162 пипетирования реагента поддерживают на уровне приблизительно 37°C для обеспечения стабильной кинетики связывания при протекании, например, ферментативной реакции.
[0284] В устройстве 164 хранения реагента хранятся реагенты. Устройство хранения реагента включает в себя блок перемещения реагента, выполненный с возможностью перемещения упаковок реагентов в заданные местоположения. В некоторых вариантах осуществления устройство 164 хранения реагента может перемещать упаковки реагентов от устройства 166 загрузки реагентов к устройству 164 хранения реагента, от устройства 164 хранения реагента до местоположения пипетирования с целью пипетирования устройством 162 пипетирования реагента, от местоположения пипетирования к устройству 164 хранения реагента, от местоположения пипетирования к местоположению для отходов, если реагенты израсходованы, от устройства 164 хранения реагента к местоположению для отходов, если истек срок годности реагентов, и от устройства 164 хранения реагента к устройству 166 загрузки реагентов для выгрузки упаковок реагентов. В некоторых вариантах осуществления устройство 164 хранения реагента имеет температурный контроль от приблизительно 2°C до 15°C. В других вариантах осуществления в устройстве 164 хранения реагента поддерживается температура от приблизительно 4°C до 10°C.
[0285] Устройство 166 загрузки реагента функционирует с возможностью загрузки одной или более упаковок реагентов. Пользователь может загружать упаковки реагентов в устройство 166 загрузки реагентов.
[0286] Транспортировочный блок 170 инкубатора перемещает реакционные сосуды в инкубатор 172 и от него. В некоторых вариантах осуществления блок 170 перемещения инкубатора перемещает один или более из пипетированных реакционных сосудов от несущего блока 160 для реагентов в инкубатор 172. Дополнительно транспортировочный блок 170 инкубатора может перемещать один или более реакционных сосудов из инкубатора 172 в несущий блок 160 для реагентов. Транспортировочный блок 170 инкубатора также может извлекать из инкубатора 172 реакционные сосуды, которые были просканированы или работа с которыми была завершена.
[0287] Инкубатор 172 имеет температурный контроль для поддержания заданной температуры. В некоторых вариантах осуществления в инкубаторе 172 поддерживается температура от приблизительно 30°C до 40°C. В других вариантах осуществления в инкубаторе 172 поддерживается температура приблизительно 37°C, чтобы обеспечить, например, иммунологическую реакцию и ферментативную реакцию. В качестве примера, инкубатор 172 выполняет инкубацию для анализа.
[0288] Блок 174 перемещения реакционных сосудов перемещает реакционные сосуды в инкубатор 172 и от него. В некоторых вариантах осуществления блок 174 перемещения реакционных сосудов перемещает инкубированные реакционные сосуды из инкубатора 172 в промывочное колесо 176, перемещает реакционные сосуды для анализа из промывочного колеса 176 в инкубатор 172, перемещает реакционные сосуды, содержащие субстрат, из промывочного колеса 176 в инкубатор 172 для инкубации субстрата или ферментативной реакции, перемещает промытые реакционные сосуды от инкубатора 172 к устройству 190 измерения освещенности после инкубации субстрата и перемещает реакционные сосуды, которые были просканированы или работа с которыми была завершена, от устройства 190 измерения освещенности к инкубатору 172. Использованные реакционные сосуды могут быть доставлены в местоположение удаления отходов.
[0289] Промывочное колесо 176 принимает и удерживает реакционные сосуды на себе так, что система 106 оценки вещества выполняет различные аспекты процесса диагностики. Пример промывочного колеса 176 описан и более подробно проиллюстрирован со ссылкой на ФИГ. 23–25. В некоторых вариантах осуществления промывочное колесо 176 представляет собой устройство с температурным контролем для разделения связанных или свободных аналитов от частиц после инкубации. В некоторых вариантах осуществления температура промывочного колеса 176 поддерживается на уровне от приблизительно 30°C до 40°C. В других вариантах осуществления температура промывочного колеса 176 поддерживается, например, на уровне приблизительно 37°C, чтобы обеспечить протекание ферментативной реакции.
[0290] Устройство 178 пипетирования субстрата функционирует с возможностью дозирования субстрата в промытый реакционный сосуд. Один пример субстрата представляет собой хемилюминесцентный субстрат для иммуноферментной реакции, например, Lumi–Phos 530, который способен генерировать свет, который можно детектировать, определяя соответствующее количество аналитов, захваченных на магнитные частицы.
[0291] Устройство 180 загрузки субстрата функционирует с возможностью загрузки одного или более подаваемых субстратов. В некоторых вариантах осуществления устройство 180 загрузки субстрата включает в себя набор из двух бутылей, одна из которых используется, а другая предназначена для обработки выгрузки и новой загрузки. Устройство 178 пипетирования субстрата может функционировать с возможностью отбора субстрата из используемой бутыли.
[0292] Устройство 190 измерения освещенности функционирует с возможностью обнаружения и измерения освещенности (например, света L на ФИГ. 4), создаваемой в результате иммунологического анализа. В некоторых вариантах осуществления устройство 190 измерения освещенности, которое также может называться люминометром, включает в себя светонепроницаемый корпус, содержащий фотоумножительную трубку (PMT) для считывания амплитуды хемилюминесцентного света от реакционного сосуда, содержащего субстрат. Реакционный сосуд может быть перемещен в устройство 190 измерения освещенности и извлечен из него с помощью блока 174 перемещения реакционных сосудов.
[0293] Устройство 192 обработки оценки функционирует с возможностью получения информации о количестве света, обнаруженного устройством 190 измерения освещенности, и оценки анализа на основании информации.
[0294] На ФИГ. 3 проиллюстрирован пример архитектуры вычислительного устройства, которое можно использовать для реализации аспектов настоящего описания, включая прибор 100 для анализа биологической пробы или различные системы прибора 100, такие как система 102 подготовки вещества, система 104 оценки подготовки и система 106 оценки вещества. Дополнительно одно или более устройств или блоков, входящих в системы прибора 100, также могут быть реализованы с по меньшей мере некоторыми компонентами вычислительного устройства, как проиллюстрировано на ФИГ. 3. Такое вычислительное устройство обозначено в настоящем документе пунктом 200. Вычислительное устройство 200 используется для запуска операционной системы, прикладных программ и программных модулей (включая программные ядра), описанных в настоящем документе.
[0295] Вычислительное устройство 200 в некоторых вариантах осуществления включает в себя по меньшей мере одно устройство 202 обработки, такое как центральное процессорное устройство (ЦПУ). Существует множество устройств обработки, выпускаемых различными производителями, например, Intel или Advanced Micro Devices. В этом примере вычислительное устройство 200 также включает в себя системную память 204 и системную шину 206, соединяющую различные компоненты системы, включая системную память 204, с устройством 202 обработки. Системная шина 206 представляет собой один из любого числа типов шинных конструкций, включая шину памяти или контроллер памяти; шину периферии и локальную шину, с использованием любой из разнообразных архитектур шин.
[0296] К примерам вычислительных устройств, подходящих для использования в качестве вычислительного устройства 200, относятся настольный компьютер, портативный компьютер, планшетный компьютер, мобильное устройство (такое как смартфон, мобильное цифровое устройство iPod® или другие мобильные устройства) или другие устройства, выполненные с возможностью обработки цифровых инструкций.
[0297] Системная память 204 включает в себя постоянное запоминающее устройство 208 и оперативное запоминающее устройство 210. Базовая система 212 ввода/вывода, содержащая базовые подпрограммы, предназначенные для передачи информации внутри вычислительного устройства 200, например, во время запуска, как правило, хранится в постоянном запоминающем устройстве 208.
[0298] Вычислительное устройство 200 также в некоторых вариантах осуществления включает в себя вторичное устройство 214 хранения, такое как жесткий диск, для хранения цифровых данных. Вторичное устройство 214 хранения соединено с системной шиной 206 с помощью интерфейса 216 вторичного хранилища. Вторичные устройства хранения и связанные с ними машиночитаемые носители обеспечивают энергонезависимое хранение машиночитаемых инструкций (включая прикладные программы и программные модули), структур данных и других данных для вычислительного устройства 200.
[0299] Хотя в примере среды, описанной в настоящем документе, в качестве вторичного запоминающего устройства используется жесткий диск, в других вариантах осуществления используются другие типы машиночитаемых носителей данных. К примерам других типов машиночитаемых носителей данных относятся магнитные кассеты, карты флеш–памяти, цифровые видеодиски, картриджи Бернулли, постоянные запоминающие устройства на компакт–дисках, память типа DVD–ROM, оперативные запоминающие устройства или постоянные запоминающие устройства. Некоторые варианты осуществления включают в себя носители для долговременного хранения информации.
[0300] Ряд программных модулей можно хранить во вторичном устройстве 214 хранения или в памяти 204, включая операционную систему 218, одну или более прикладных программ 220, другие программные модули 222 и программные данные 224.
[0301] В некоторых вариантах осуществления вычислительное устройство 200 включает в себя устройства ввода, позволяющие пользователю вводить входные данные в вычислительное устройство 200. Примеры устройств 226 ввода включают в себя клавиатуру 228, устройство 230 ввода типа указателя, микрофон 232 и сенсорный дисплей 240. Другие варианты осуществления включают в себя другие устройства 226 ввода. Устройства ввода часто подключаются к устройству 202 обработки через интерфейс 238 ввода/вывода, который соединен с системной шиной 206. Эти устройства 226 ввода могут быть присоединены с помощью любого числа интерфейсов ввода/вывода, таких как параллельный порт, последовательный порт, игровой порт или универсальная последовательная шина. Также возможна беспроводная связь между устройствами ввода и интерфейсом 238, а в некоторых возможных вариантах осуществления используются технологии инфракрасной связи, технология беспроводной связи Bluetooth® или технология WiFi (802.11a/b/g/n и т. д.), сотовая связь или другие системы радиочастотной связи.
[0302] В этом примере осуществления сенсорное дисплейное устройство 240 также подключено к системной шине 206 посредством интерфейса, такого как видеоадаптер 242. Сенсорное дисплейное устройство 240 включает в себя сенсорные датчики для приема ввода от пользователя при прикосновении пользователя к дисплею. Такие датчики могут представлять собой емкостные датчики, датчики давления или другие сенсорные датчики. Датчики не только обнаруживают контакт с дисплеем, но также определяют местоположение контакта и перемещение контакта с течением времени. Например, пользователь может перемещать палец или стилус по экрану для рукописного ввода. Записанные входные данные оцениваются и в некоторых вариантах осуществления преобразуются в текстовые входные данные.
[0303] В дополнение к дисплейному устройству 240 вычислительное устройство 200 может включать в себя различные другие периферийные устройства (не показаны), такие как динамики или принтер.
[0304] Вычислительное устройство 200 дополнительно включает в себя устройство 246 связи, выполненное с возможностью установления связи по сети. В некоторых вариантах осуществления при использовании в среде локальной сети или среде глобальной сети (такой как Интернет) вычислительное устройство 200, как правило, подключено к сети по сетевому интерфейсу, такому как беспроводной сетевой интерфейс 248. В других возможных вариантах осуществления используются другие проводные и/или беспроводные устройства связи. Например, некоторые варианты осуществления вычислительного устройства 200 включают в себя сетевой интерфейс Ethernet или модем для передачи данных по сети. В других вариантах осуществления устройство 246 связи выполнено с возможностью беспроводной связи ближнего действия. Беспроводная связь ближнего действия представляет собой одностороннюю или двухстороннюю беспроводную связь ближнего и среднего радиуса действия. Беспроводная связь ближнего может быть установлена в соответствии с различными технологиями и протоколами. Примеры беспроводной связи ближнего действия включают в себя радиочастотную идентификацию (RFID), ближнюю бесконтактную связь (NFC), технологию Bluetooth и технологию Wi–Fi.
[0305] Вычислительное устройство 200, как правило, содержит по меньшей мере какую–либо форму машиночитаемого носителя. Машиночитаемые носители включают в себя любые доступные носители, к которым может получить доступ вычислительное устройство 200. В качестве примера, к машиночитаемым носителям относятся машиночитаемый носитель данных и машиночитаемая среда связи.
[0306] К машиночитаемым носителям данных относятся энергозависимые и энергонезависимые съемные и несъемные носители, реализованные в любом устройстве, выполненном с возможностью хранения информации, такой как машиночитаемые инструкции, структуры данных, программные модули или другие данные. К машиночитаемым носителям для хранения данных относятся, без ограничений, оперативное запоминающее устройство, постоянное запоминающее устройство, электрически стираемое программируемое постоянное запоминающее устройство, флеш–память или другие технологии памяти, постоянное запоминающее устройство на компакт–диске, цифровые универсальные диски или другие накопители на оптических дисках, магнитные кассеты, накопители на магнитной ленте, магнитных дисках или другие магнитные устройства хранения, или любой другой носитель, который можно использовать для хранения нужной информации и к которому можно получить доступ с помощью вычислительного устройства 200.
[0307] Машиночитаемые среды связи обычно реализуют машиночитаемые инструкции, структуры данных, программные модули или другие данные в виде модулированного сигнала данных, такого как несущая волна или другой механизм переноса, и включают любое средство доставки информации. Термин «модулированный сигнал данных» относится к сигналу, одна или более характеристик которого устанавливаются или изменяются таким образом, чтобы закодировать информацию в сигнале. В качестве примера, машиночитаемые среды связи включают в себя проводные среды, такие как проводная сеть или прямое проводное соединение, и беспроводные среды, такие как акустические, радиочастотные, инфракрасные и другие беспроводные среды. Комбинации любого из вышеперечисленного также относятся к числу машиночитаемых носителей.
[0308] Образцы крови представляют собой цельную кровь, сыворотку, плазму и другие компоненты или фракции крови. В некоторых вариантах осуществления прибор 100 для анализа биологической пробы выполнен с возможностью анализа одного или более типов образцов физиологических жидкостей. К физиологическим жидкостям относятся кровь, моча, слюна, спинномозговая жидкость, амниотическая жидкость, фекалии, слизь, клеточные или тканевые экстракты и экстракты нуклеиновых кислот. Пробы, также называемые образцами, собирают в донорских центрах, врачебных кабинетах, кабинетах флеботомистов, больницах, клиниках и других медицинских учреждениях, без ограничений. Затем собранную физиологическую жидкость и ее компоненты часто подвергают обработке, исследуют и распределяют по клиническим лабораториям, больницам, банкам крови, кабинетам врачей или другим медицинским учреждениям. В настоящем описании прибор 100 описан главным образом применительно к проведению иммуноанализа, в котором измеряют наличие или концентрацию макромолекулы в растворе за счет использования антитела или иммуноглобулина. Такая макромолекула в настоящем документе также называется аналитом. Однако в других вариантах осуществления прибор 100 включает в себя анализатор биологических проб любого типа. Например, прибор 100 может представлять собой клинический биохимический анализатор, анализатор типа крови, анализатор нуклеиновых кислот, микробиологический анализатор или любой другой тип диагностического анализатора для диагностики in vitro (IVD).
[0309] На ФИГ. 4 представлена принципиальная схема, иллюстрирующая пример способа 300 иммунологического анализа. В некоторых вариантах осуществления способ 300 включает в себя операции 302, 304, 306, 308, 310, 312 и 314. В некоторых вариантах осуществления по меньшей мере некоторые из операций в способе 300 выполняются системой 102 подготовки вещества, системой 104 оценки подготовки и/или системой 106 оценки вещества в приборе 100.
[0310] При операции 302 кювету 320 (например, реакционный сосуд) перемещают в заданное положение и в кювету 320 дозируют первый реагент, содержащий магнитные частицы 322. В некоторых вариантах осуществления кювета 320 представляет собой реакционный сосуд и транспортируется на промывочное колесо 176.
[0311] При операции 304 в кювету 320 дозируют пробу или образец 324. В некоторых вариантах осуществления устройство 152 пипетирования образцов, в которое подается пипетирующий наконечник, поступающий из податчика 150 пипетирующих наконечников, аспирирует образец 324 из сосуда с образцом, перемещенного в заданное положение. После дозирования образца в кювету 320, кювету 320 при необходимости можно подвергать перемешиванию, чтобы получить магнитные частицы–носители, каждая из которых образована из антигена и магнитной частицы в образце 324, связанных друг с другом.
[0312] При операции 306 кювету 320 подвергают первому процессу очистки, в ходе которого магнитные частицы–носители собирают магнитным полем при помощи собирающего магнитного блока 326, и проводят отделение несвязавшихся веществ при помощи очистительной аспирационной форсунки 328 для несвязавшихся веществ. В результате этого непрореагировавшее вещество 330, находящееся в кювете 320, удаляется.
[0313] При операции 308 в кювету 320 вводят второй реагент 332, такой как маркирующий реагент, содержащий меченное антитело. В результате этого получают иммунные комплексы 334, каждый из которых образован из магнитной частицы–носителя и меченного антитела 332, связанных друг с другом.
[0314] При операции 310 выполняют второй процесс очистки от несвязавшихся веществ и сбора магнитным полем магнитных частиц–носителей с помощью собирающей магнитной конструкции 336. Дополнительно отделение несвязавшихся веществ выполняется при помощи очистительной аспирационной форсунки 338 для несвязавшихся веществ. В результате этого меченное антитело 332, не связавшееся с магнитными частицами–носителями, удаляется из кюветы 320.
[0315] При операции 312 в кювету 320 дозируют субстрат, содержащий фермент 340, который затем перемешивают. По истечении заданного времени, необходимого для проведения ферментативной реакции, кювету 320 транспортируют в фотометрическую систему, такую как устройство 190 измерения освещенности.
[0316] При операции 314 фермент 340 и иммунный комплекс 334 связываются друг с другом путем реакции субстрата 340 с ферментом на меченном антителе 332 и свет L испускается иммунным комплексом 334 и измеряется фотометрической системой, такой как устройство 190 измерения освещенности. Устройство 190 измерения освещенности функционирует с возможностью расчета количества антигена, которое содержится в пробе, по измеренной освещенности.
[0317] На ФИГ. 5–39 представлен пример системы 120 определения объема.
[0318] На ФИГ. 5 представлена блок–схема примера системы 120 определения объема, изображенной на ФИГ. 1. В некоторых вариантах осуществления система 120 определения объема включает в себя устройство 400 определения объема дозирующего наконечника и устройство 402 определения объема сосуда. Система 120 определения объема дополнительно включает в себя систему 404 генерации корреляционных данных, которая генерирует корреляционные данные 406.
[0319] Устройство 400 определения объема дозирующего наконечника предназначено для определения объема текучего вещества 118, аспирированного в дозирующий наконечник 112.
[0320] Текучее вещество 118 может быть любого типа, подходящего для дозирования в контейнер и подачи для дальнейшего анализа. В различных вариантах осуществления текучее вещество 118 может представлять собой пробу для проведения анализа, компоненты для подготовки образца, разбавители, буферы, реагенты или любые комбинации вышеуказанного. Если текучее вещество 118 содержит кровь или ее компоненты, то к примерам текучего вещества 118 относятся цельная кровь, плазма крови, сыворотка, эритроциты, лейкоциты, тромбоциты, разбавители, реагенты или любые их комбинации. Текучее вещество 118 может представлять собой другие типы физиологических текучих веществ, таких как слюна, спинномозговая жидкость, моча, амниотическая жидкость, фекалии, слизь, экстракты клеток или тканей, нуклеиновые кислоты или любой другой тип физиологической жидкости, ткани или материала, который предположительно содержит интересующий аналит. Если текучее вещество 118 представляет собой реагент, то реагент может быть различных типов, известных для применения при анализе биологических проб. К некоторым примерам реагентов относятся жидкие реагенты, содержащие меченные специфически связывающиеся реагенты, например, зонды из антител или нуклеиновых кислот, жидкие реагенты, содержащие реакционноспособные и/или нереакционноспособные вещества, суспензии эритроцитов и суспензии частиц. В других вариантах осуществления реагент может представлять собой хемилюминесцентный субстрат.
[0321] Как описано в настоящем документе, дозирующий наконечник 112 может относиться к разным типам и использоваться для разных процессов. Одним примером дозирующего наконечника 112 является пипетирующий наконечник, который может использоваться с устройством 152 пипетирования образцов. Устройство 400 определения объема дозирующего наконечника может использовать блок 130 захвата изображения дозирующего наконечника. Пример устройства 400 определения объема дозирующего наконечника проиллюстрирован и описан более подробно со ссылкой на ФИГ. 9–21.
[0322] Устройство 402 определения объема сосуда функционирует с возможностью определения объема текучего вещества 118, содержащегося в сосуде 114. Как описано в настоящем документе, сосуд 114 может относиться к различным типам и использоваться для разных процессов. К примерам сосудов 114 относятся реакционный сосуд, сосуд с образцом и сосуд для разбавления, которые используются в ходе процесса в приборе 100. Устройство 402 определения объема сосуда может использовать блок 132 захвата изображения сосуда. Пример устройства 402 определения объема сосуда проиллюстрирован и описан более подробно со ссылкой на ФИГ. 22–39.
[0323] Система 404 генерации корреляционных данных генерирует корреляционные данные 406. Корреляционные данные 406 предоставляют информацию, которая используется системой 120 определения объема для определения объема текучего вещества 118, принятого в контейнер 110. В некоторых вариантах осуществления система 404 генерации корреляционных данных представляет собой устройство, независимое от системы 120 определения объема. В других вариантах осуществления система 404 генерации корреляционных данных выполнена с возможностью использования по меньшей мере некоторых ресурсов системы 120 определения объема.
[0324] На ФИГ. 6 представлена функциональная схема, иллюстрирующая пример способа 410 функционирования системы 120 определения объема. В некоторых вариантах осуществления по меньшей мере некоторые из операций в способе 410 выполняются системой 102 подготовки вещества, системой 104 оценки подготовки и/или системой 106 оценки вещества в приборе 100. В других вариантах осуществления для выполнения по меньшей мере одной из операций в способе 410 используются другие компоненты, блоки и устройства прибора 100.
[0325] При операции 412 в контейнер 110 подают гидравлическое вещество 118. В некоторых вариантах осуществления система 102 подготовки вещества может выполнять операцию 412. В других вариантах осуществления в контейнер 110 предварительно загружают текучее вещество 118, а затем контейнер 110 загружают в прибор 100, который его использует.
[0326] При операции 414 контейнер 110, содержащий текучее вещество 118, транспортируется к блоку захвата изображения, такому как блок 130 захвата изображения дозирующего наконечника и блок 132 захвата изображения сосуда.
[0327] При операции 416 блок захвата изображения захватывает изображение контейнера 110. В некоторых вариантах осуществления изображение контейнера 110 представляет собой цифровое изображение с заданным разрешением.
[0328] При операции 418 система 104 оценки подготовки (например, система 120 определения объема) анализирует изображение для определения объема текучего вещества 118 внутри контейнера 110. Пример операции 416 более подробно описан применительно к ФИГ. 7.
[0329] При операции 420 система 104 оценки подготовки (например, система 120 определения объема) определяет, попадает ли определенный объем в диапазон допуска. Если определенный объем выходит за пределы диапазона допуска, то считается, что подача текучего вещества 118 в контейнер 110 была неприемлемой. В некоторых вариантах осуществления такой диапазон допуска определяют на основании допустимого отклонения от целевого объема текучего вещества 118, которое предназначено для подачи в контейнер 110. Если определяется, что определенный объем находится в пределах диапазона допуска («ДА» при операции 420), способ 410 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 420) способ 410 переходит к операции 422.
[0330] При операции 422 система 104 оценки подготовки (например, система 120 определения объема) устанавливает флаг контейнера 110, указывающий на то, что объем текучего вещества 118 внутри контейнера 110 не подходит для последующих процессов. Альтернативно система 104 оценки подготовки выполнена с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества. В других вариантах осуществления, как описано в настоящем документе, результат оценки может использоваться для автоматической корректировки объема текучего вещества в ответ на определение объема.
[0331] На ФИГ. 7 представлена функциональная схема, иллюстрирующая пример способа 430 выполнения операции 418, изображенной на ФИГ. 6. В частности, способ 430 обеспечивает процессы для анализа захваченного изображения контейнера 110 с целью определения объема текучего вещества 118, содержащегося в контейнере 110.
[0332] При операции 432 система 104 оценки подготовки (например, система 120 определения объема) обнаруживает на изображении опорную точку. Опорная точка связана с контейнером 110. В некоторых вариантах осуществления опорная точка включает в себя местоположение или часть пригодной для обнаружения структуры, образованной на контейнере 110. В других вариантах осуществления опорная точка выполнена в виде части контейнера 110. Также возможны и другие примеры опорной точки. Для определения уровня поверхности текучего вещества 118 на изображении можно использовать различные способы обработки изображений.
[0333] При операции 434 система 104 оценки подготовки (например, система 120 определения объема) обнаруживает уровень поверхности текучего вещества 118 внутри контейнера 110 на изображении. Для определения уровня поверхности текучего вещества 118 на изображении можно использовать различные способы обработки изображений.
[0334] При операции 436 система 104 оценки подготовки (например, система 120 определения объема) измеряет расстояние между опорной точкой и уровнем поверхности. В некоторых вариантах осуществления между опорной точкой и уровнем поверхности на изображении измеряется расстояние в пикселях. В некоторых вариантах осуществления расстояние в пикселях рассчитывают на основании евклидова расстояния между двумя пиксельными точками.
[0335] При операции 438 система 104 оценки подготовки (например, система 120 определения объема) преобразует расстояние в объем на основании корреляционных данных 406. Корреляционные данные 406 включают в себя информацию о корреляции между объемами внутри контейнера 110 и расстояниями от опорной точки до множества разных уровней поверхности внутри контейнера 110. Пример способа генерации корреляционных данных описан со ссылкой на ФИГ. 8.
[0336] На ФИГ. 8 представлена функциональная схема, иллюстрирующая пример способа 450 функционирования системы 404 генерации корреляционных данных для генерации корреляционных данных 406. В некоторых вариантах осуществления по меньшей мере часть прибора 100 используется как система 404 генерации корреляционных данных. В других вариантах осуществления система 404 генерации корреляционных данных генерирует корреляционные данные независимо от прибора 100.
[0337] При операции 452 система 404 генерации корреляционных данных подает жидкость в контейнер. Контейнер, используемый в способе 450, представляет собой тот же контейнер 110, который в данном случае подвергается процессу определения объема. Жидкость, используемая в способе 450, не обязательно должна быть идентична текучему веществу 118, используемому в приборе 100.
[0338] При операции 454 система 404 генерации корреляционных данных захватывает изображение контейнера, содержащего жидкость.
[0339] При операции 456 система 404 генерации корреляционных данных получает расстояние между опорной точкой (т.е. опорной точкой, описанной в операции 432) и поверхностью текучего вещества на изображении, захваченном в операции 454. В некоторых вариантах осуществления расстояние может быть определено аналогично по меньшей мере некоторым из операций способа 430, таким как операции 432, 434 и 436.
[0340] При операции 458 система 404 генерации корреляционных данных измеряет объем жидкости, поданной в контейнер. Для определения объема жидкости внутри контейнера можно использовать различные способы. Некоторые из таких способов описаны в данном документе.
[0341] При операции 460 система 404 генерации корреляционных данных сопоставляет расстояние, рассчитанное при операции 456, и объем, измеренный в ходе операции 458.
[0342] При операции 462 система 404 генерации корреляционных данных определяет, было ли получено достаточное количество корреляций для генерации корреляционных данных 406. Если да («ДА» при операции 470), то способ 450 переходит к операции 464. В противном случае («НЕТ» при операции 470) способ 450 возвращается к операции 452, во время которой жидкость подается в контейнер, и выполняются последующие операции для определения дополнительных корреляций между расстоянием и объемом жидкости внутри контейнера. Для получения достаточного диапазона корреляционных данных количество жидкости, подаваемой в контейнер, может изменяться в разных циклах процесса корреляции. Кроме того, количество жидкости, подаваемой в контейнер, может оставаться приблизительно одинаковым для некоторых циклов корреляции, чтобы получить надежные результаты для конкретных объемов или диапазонов объемов.
[0343] При операции 464 система 404 генерации корреляционных данных создает корреляционные данные 408 на основании множества корреляций, выполненных в ходе операции 460. В некоторых вариантах осуществления корреляционные данные 408 могут быть экстраполированы для прогнозирования соотношения между расстоянием и объемом. Например, из корреляционных данных 408 можно создать корреляционную кривую, таблицу подстановки или математическую формулу для аппроксимации данных и оценки соотношения между расстоянием и объемом внутри контейнера.
[0344] На ФИГ. 9–21 представлен пример устройства 400 определения объема дозирующего наконечника, изображенного на ФИГ. 5.
[0345] На ФИГ. 9 проиллюстрирован пример устройства 400 определения объема дозирующего наконечника, изображенного на ФИГ. 5. В некоторых вариантах осуществления устройство 400 определения объема дозирующего наконечника включает в себя устройство 500 определения объема аспирации образца. Дополнительно устройство 400 определения объема дозирующего наконечника использует корреляционные данные 506 по объемам наконечников, генерируемые системой 504 генерации корреляционных данных по объемам наконечников.
[0346] Устройство 500 определения объема аспирации образца функционирует с возможностью определения объема образца, аспирированного в пипетирующий наконечник устройства 152 пипетирования образцов. Пример конструкции и функционирования устройства 500 определения объема аспирации образцов описан ниже.
[0347] Система 504 генерации корреляционных данных по объемам наконечников генерирует корреляционные данные 506 по объемам наконечников. Корреляционные данные 506 по объемам наконечников предоставляют информацию, используемую устройством 400 определения объема дозирующего наконечника для определения объема текучего вещества, принятого в дозирующий наконечник (например, пипетирующий наконечник для образца). В некоторых вариантах осуществления система 504 генерации корреляционных данных по объемам наконечников представляет собой устройство, независимое от устройства 400 определения объема дозирующего наконечника. В других вариантах осуществления система 504 генерации корреляционных данных по объемам наконечников выполнена с возможностью использования по меньшей мере некоторых ресурсов устройства 400 определения объема дозирующего наконечника. Система 504 генерации корреляционных данных и корреляционные данные 506 по объемам наконечников входят в состав или являются примерами системы 404 генерации корреляционных данных и корреляционных данных 406, как проиллюстрировано на ФИГ. 5.
[0348] Надежная клиническая диагностика требует правильной и точной аспирации и дозирования анализируемого вещества. Например, в автоматическом анализаторе, который анализирует пробу, такую как кровь или любая другая физиологическая жидкость, колебания дозированного количества пробы и других веществ, таких как реагент, в реакционном сосуде относительно заданного количества, могут влиять на результат анализа и снижать надежность обследования и анализа. Таким образом, полезно установить технологию для измерения аспирированного или дозированного количества с высокой точностью и отбора только тех аспирированных или дозированных проб, количество которых находится в пределах подходящего диапазона. Один из способов измерения объема жидкости представляет собой обнаружение уровня поверхности жидкости путем определения высоты жидкости внутри сосуда с использованием резонансной частоты. В других случаях для определения вязкости жидкости (например, образца), аспирированной дозирующим наконечником, используют давление воздуха. В других случаях для определения расхода аспирированной или дозированной жидкости используется датчик расхода.
[0349] Однако эти подходы имеют различные недостатки. Например, обнаружение уровня поверхности жидкости с использованием резонансной частоты и определение вязкости жидкости с использованием давления воздуха позволяют определять объем жидкости в контейнере, но не позволяют количественно определять объем аспирированной или дозированной жидкости. Датчики расхода позволяют количественно определять объем жидкости, проходящей через трубку, на которой расположены датчики расхода, но не позволяют надежно измерять объем аспирированной или дозированной жидкости. Эти способы не имеют процессов идентификации случаев неточной аспирации образца в случае ошибочных результатов.
[0350] Как более подробно описано в настоящем документе, устройство 400 определения объема дозирующего наконечника использует способ обработки изображения для количественного определения аспирированного объема текучего вещества (например, образца). Объем текучего вещества аспирируют в прозрачный или полупрозрачный контейнер, такой как конический дозирующий наконечник. Получают изображение контейнера и на изображении обнаруживают опорную точку. Устройство определения объема дозирующего наконечника измеряет расстояние от мениска текучего вещества до опорной точки и сопоставляет расстояние с объемом с помощью калибровочной кривой объема. Если объем, аспирированный внутрь контейнера, не соответствует требованиям к правильности или точности аспирации, то аспирация или все исследование отмечаются флагом. Пользователь или оператор может получить информацию о результате аспирации.
[0351] На ФИГ. 10 схематично проиллюстрирован пример структуры системы 510 аспирации образцов, связанной с устройством 500 определения объема аспирации образца. В проиллюстрированном примере устройство 500 определения объема аспирации образца описано и проиллюстрировано главным образом в виде примера устройства 400 определения объема дозирующего наконечника. Однако следует понимать, что любые типы устройств 400 определения объема дозирующего наконечника могут использоваться таким же или аналогичным образом, что и устройство 500 определения объема аспирации образца.
[0352] В некоторых вариантах осуществления система 510 аспирации образцов включает в себя модуль 512 пипетирования образцов, выполненный с возможностью перемещения между различными положениями вдоль направляющей 514 для перемещения образцов. Модуль 512 пипетирования образцов может перемещаться в положение 516 подачи наконечника, положение 518 дозирования образца, положение 520 сброса наконечника в отходы и положение 522 аспирации образца. В некоторых вариантах осуществления модуль 512 пипетирования образцов включает в себя основание 524 и сердечник 526, поддерживаемый на основании 524. Модуль 512 пипетирования образцов включает в себя блок 528 вертикального перемещения, выполненный с возможностью вертикального перемещения основания 524, содержащего сердечник 526, относительно контейнера 530 для образца. Сердечник 526 выполнен с возможностью крепления дозирующего наконечника 112, который в настоящем документе также называется пипетирующим наконечником или зондом, аспирирующим наконечником или зондом или одноразовым наконечником или зондом 112.
[0353] В приборе 100 образцы аспирируют при помощи дозирующих наконечников, чтобы избежать рисков загрязнения. Модуль 512 пипетирования образцов может перемещаться в положение 516 подачи наконечника и вертикально опускать основание 524 модуля 512 для вставки сердечника 526 в дозирующий наконечник 112, который подается блоком 534 подачи дозирующего наконечника. Затем модуль 512 пипетирования образцов перемещается в положение 522 аспирации образца, в котором модуль 512 пипетирования образцов функционирует с возможностью аспирации заданного объема образца 540 из контейнера 530 для образца. После аспирации образца устройство 500 определения объема аспирации образца определяет объем образца, аспирированного в дозирующий наконечник 112. В некоторых вариантах осуществления устройство 500 определения объема аспирации образца включает в себя блок 130 захвата изображения дозирующего наконечника для захвата изображения дозирующего наконечника 112 в рамках процесса определения объема. После этого модуль 512 пипетирования образцов перемещается в положение 518 дозирования образца для дозирования аспирированного объема образца в реакционный контейнер 536, а затем перемещается в положение 520 сброса наконечника в отходы для удаления дозирующего наконечника 112 в блок 538 отходов дозирующих наконечников.
[0354] В некоторых вариантах осуществления система 510 аспирации образцов реализована с по меньшей мере некоторыми компонентами прибора 100, как проиллюстрировано на ФИГ. 2. Например, модуль 512 пипетирования образцов соответствует устройству 152 пипетирования образца (включающему в себя пипетирующий блок 152A аликвотирования образца и блок 152B прецизионного пипетирования образца) прибора 100. Контейнер 530 для образца может соответствовать пробирке для образца. Блок 534 подачи дозирующего наконечника может соответствовать податчику 150 пипетирующих наконечников. Реакционный контейнер 536 может соответствовать сосуду с образцом, реакционному сосуду или любому другому сосуду.
[0355] НА ФИГ. 11, 12A и 12B проиллюстрирована система 510 аспирации образцов, изображенная на ФИГ. 10. На ФИГ. 11 представлен вид в перспективе системы аспирации образцов, изображенной на ФИГ. 10. На ФИГ. 12A представлен вид сбоку системы 510 аспирации образцов, а на ФИГ. 12B представлен другой вид сбоку системы 510 аспирации образцов, на котором проиллюстрировано, что модуль 512 пипетирования образцов находится в положении 522 аспирации для определения объема с использованием устройства 500 определения объема аспирации образца.
[0356] Как проиллюстрировано, блок 130 захвата изображения дозирующего наконечника включает в себя первый блок 550 камеры и связанные с ним компоненты, которые установлены на пипетирующем блоке 152A аликвотирования образца. В некоторых вариантах осуществления первый блок 550 камеры и другие такие компоненты выполнены с возможностью перемещения вместе с соответствующим сердечником и дозирующим наконечником пипетирующего блока 152A аликвотирования образца.
[0357] В некоторых вариантах осуществления блок 550 камеры включает в себя дополнительный металл–оксидный полупроводниковый (CMOS) датчик изображения для получения цветного цифрового изображения. В других вариантах осуществления блок 550 камеры включает в себя датчик изображения на основе прибора с зарядовой связью (CCD) для получения цветного цифрового изображения. Как показано на ФИГ. 12, блок 550 камеры размещен сбоку от дозирующего наконечника 112. Другие варианты осуществления блока 550 камеры выполнены с возможностью получения черно–белых изображений или изображений в оттенках серого. Одним примером блока 550 камеры является модель ADVANTAGE 102, доступная от компании Cognex Corporation (г. Натик, штат Массачусетс, США), такая как камера AE3–IS Machine Vision Color Camera+плата ввода/вывода (например, с № по кат. AE3C–IS–CQBCKFS1–B).
[0358] Блок 130 захвата изображения дозирующего наконечника может дополнительно включать в себя источник света 552 для камеры 550. Источник 552 света используется для освещения фотографируемого дозирующего наконечника 112 и его окружения при необходимости. Источник 552 света может быть размещен в различных местоположениях. В проиллюстрированном примере источник 552 света расположен сзади от дозирующего наконечника 112 напротив блока 550 камеры и, таким образом, используется в качестве подсветки. Также возможны и другие местоположения источника 552 света. Одним примером источника 552 света является серия MDBL, доступная от компании Moritex Corporation (Япония).
[0359] В других вариантах осуществления блок 550 камеры включает в себя источник 551 света, такой как светодиодный осветитель, функционирующий с возможностью испускания света в сторону дозирующего наконечника 112. В этой конфигурации источник 552 света можно заменить на экран 553, который размещен напротив блока 550 камеры таким образом, что дозирующий наконечник 112 расположен между блоком 550 камеры и экраном 553. Экран 553 используется для отбрасывания света обратно в направлении поля зрения (FOV) камеры путем отражения света в направлении апертуры камеры. Экран 553 выполнен из одного или более различных материалов, которые могут обеспечивать разные значения интенсивности отражения. Например, экран 553 включает в себя светоотражающий лист, одним примером которого является 3M™ Scotchlite™ Sheeting 7610, доступный от компании 3M (г. Мейплвуд, штат Миннесота, США). В другом варианте осуществления источник 552 света можно использовать вместе с источником 551 света от блока 550 камеры и экраном 553.
[0360] В некоторых вариантах осуществления блок 550 камеры и источник 552 света (или экран 553) прикреплены к модулю 512 пипетирования образцов и выполнены с возможностью перемещения горизонтально вместе с модулем 512 пипетирования образцов, так что изображение дозирующего наконечника 112 захватывается при любых положениях модуля 512 пипетирования образцов. Например, изображение дозирующего наконечника 112, содержащего аспирированный образец, может быть получено в любом положении после аспирации образца (т.е. в положении 522 аспирации образца) и перед дозированием образца (т.е. в положении 518 дозирования образца). В других вариантах осуществления блок 550 камеры прикреплен к модулю 512 пипетирования образцов, в то время как источник 552 света (или экран 553) не прикреплен к модулю 512 пипетирования образцов. В других вариантах осуществления блок 550 камеры не прикреплен к модулю 512 пипетирования образцов, в то время как источник 552 света (или экран 553) прикреплен к модулю 512 пипетирования образцов. В других вариантах осуществления ни блок 550 камеры, ни источник света 552 (или экран 553) не прикреплены к модулю 512 пипетирования образцов.
[0361] Кроме того, блок 130 захвата изображения дозирующего наконечника может включать в себя второй блок 2550 камеры и связанные с ним компоненты, которые установлены в блоке 152B прецизионного пипетирования образца. Второй блок 2550 камеры и связанные с ним компоненты могут быть выполнены аналогично первому блоку 550 камеры и связанным с ним компонентам.
[0362] В некоторых вариантах осуществления второй блок 2550 камеры и другие такие компоненты выполнены с возможностью перемещения вместе с соответствующим сердечником и дозирующим наконечником пипетирующего блока 152A аликвотирования образца.
[0363] Второй блок 2550 камеры может быть выполнен аналогично первому блоку 550 камеры. Одним примером блока 2550 камеры является модель ADVANTAGE 102, доступная от компании Cognex Corporation (г. Натик, штат Массачусетс, США), такая как камера AE3–IS Machine Vision Camera+плата ввода/вывода (например, с № по кат. AE3–IS–CQBCKFP2–B).
[0364] Блок 130 захвата изображения дозирующего наконечника может дополнительно включать в себя источник света 2552 для камеры 2550. Источник 2552 света используется для освещения фотографируемого дозирующего наконечника 112 и его окружения при необходимости. Источник 2552 света может быть размещен в различных местоположениях. В проиллюстрированном примере источник 2552 света расположен сзади от дозирующего наконечника 112 напротив блока 2550 камеры и, таким образом, используется в качестве подсветки. Также возможны и другие местоположения источника 2552 света. Одним примером источника 2552 света является серия MDBL, доступная от компании Moritex Corporation (Япония).
[0365] В других вариантах осуществления блок 550 камеры включает в себя источник 2551 света, такой как светодиодный осветитель, функционирующий с возможностью испускания света в сторону дозирующего наконечника 112. В этой конфигурации источник 2552 света можно заменить на экран 2553, который размещен напротив блока 550 камеры таким образом, что дозирующий наконечник 112 расположен между блоком 2550 камеры и экраном 2553. Экран 2553 используется для отбрасывания света обратно в направлении поля зрения (FOV) камеры путем отражения света в направлении апертуры камеры. Экран 2553 выполнен из одного или более различных материалов, которые могут обеспечивать разные значения интенсивности отражения. Например, экран 2553 включает в себя светоотражающий лист, одним примером которого является 3M™ Scotchlite™ Sheeting 7610, доступный от компании 3M (г. Мейплвуд, штат Миннесота, США). В другом варианте осуществления источник 2552 света можно использовать вместе с источником 2551 света от блока 2550 камеры и экраном 2553.
[0366] В некоторых вариантах осуществления блок 2550 камеры и источник 2552 света (или экран 2553) выполнены неподвижными и независимыми от перемещения модуля 512 пипетирования образцов. В других вариантах осуществления также возможны и другие конфигурации.
[0367] Как описано в настоящем документе, блок 2550 камеры и связанные с ним компоненты могут использоваться для обнаружения смещения наконечника, как дополнительно проиллюстрировано на ФИГ. 67.
[0368] На ФИГ. 13 и 14 представлен пример дозирующего наконечника 112. В частности, на ФИГ. 13 представлен схематический вид в перспективе примера дозирующего наконечника 112, а на ФИГ. 14 представлен вид в поперечном разрезе дистального конца дозирующего наконечника 112.
[0369] Дозирующий наконечник 112 проходит от проксимального конца 560 и дистального конца 562. Дозирующий наконечник 112 включает в себя часть 564 основания на проксимальном конце 560, которая выполнена с возможностью прикрепления дозирующего наконечника 112 к сердечнику 526 модуля 512 пипетирования образцов. Дозирующий наконечник 112 дополнительно включает в себя удлиненную корпусную часть 566, проходящую от части 564 основания. Дозирующий наконечник 112, включающий в себя часть 564 основания и корпусную часть 566, образует проход (или канал) 572 пипетирования для аспирации, хранения и дозирования текучего вещества. В некоторых вариантах осуществления дозирующий наконечник 112 (включая дозирующий наконечник 112) является одноразовым. В других вариантах осуществления дозирующий наконечник 112 (включая дозирующий наконечник 112) не является одноразовым или пригодным для многократного использования перед утилизацией.
[0370] В некоторых вариантах осуществления дозирующий наконечник 112 имеет опорную линию 570, которая выполнена с возможностью обнаружения блоком 130 захвата изображения дозирующего наконечника. Опорная линия 570 может быть образована в различных местоположениях дозирующего наконечника 112. В некоторых вариантах осуществления опорная линия 570 образована на корпусной части 566 дозирующего наконечника 112. В других вариантах осуществления опорная линия 570 образована на части 564 основания дозирующего наконечника 112. Некоторые примеры опорной линии 570 расположены таким образом, что уровень поверхности или мениск текучего вещества, аспирированного в дозирующий наконечник 112, расположен между опорной линией 570 и дистальным концом 562 дозирующего наконечника 112. В других вариантах осуществления опорная линия 570 размещена таким образом, что мениск аспирированного текучего вещества расположен над опорной линией 570 относительно дистального конца 562 (т.е. между опорной линией 570 и проксимальным концом 560).
[0371] Опорная линия 570 выполняется на дозирующем наконечнике 112 различными способами. В некоторых вариантах осуществления опорная линия 570 представляет собой пригодную для обнаружения структуру, такую как выступ, гребень, выемка, прорезь или любой другой видимый элемент, образованный на дозирующем наконечнике 112. В других вариантах осуществления опорная линия 570 представляет собой маркер или индикатор, нарисованный на дозирующем наконечнике 112 или прикрепленный к нему. Опорная линия 570 может быть образована на или сформована как одно целое с дозирующим наконечником 112. Альтернативно опорная линия 570 выполнена отдельно и прикреплена к дозирующему наконечнику 112.
[0372] Опорную линию 570 используют в качестве опорной точки при анализе изображения дозирующего наконечника 112 с целью определения правильности аспирации образца для аналитического исследования. Как описано в настоящем документе, устройство 500 определения объема аспирации образца измеряет объем аспирированного образца в дозирующем наконечнике 112 путем измерения расстояния между опорной линией 570 и мениском образца. Поскольку опорная линия 570 образована на дозирующем наконечнике 112, опорная линия 570 обеспечивает устойчивую опорную точку для измерения объема по сравнению с любыми опорными точками, обеспечиваемыми структурами, отличными от дозирующего наконечника 112. Например, если в качестве опорной точки используется часть или точка на сердечнике 526, то положение сердечника 526 относительно дозирующего наконечника 112 может варьировать в зависимости от глубины введения сердечника 526 в дозирующий наконечник 112, что, таким образом, приводит к неточному измерению объема. В отличие от этого, опорная линия 570 неподвижна относительно дозирующего наконечника 112 и, таким образом, может обеспечивать точное измерение.
[0373] Как проиллюстрировано на ФИГ. 14, канал 572 пипетирования включает в себя коническую секцию 574, внутренний диаметр которой становится меньше от проксимального конца 560 к дистальному концу 562. Канал 572 пипетирования дополнительно включает в себя прямую секцию 576, которая имеет постоянный внутренний диаметр на дистальном конце 562 или смежно с ним. Прямая секция 576 может повышать правильность и точность аспирации небольшого объема, такого как приблизительно 2–5 мкл, и при этом делает дозирующий наконечник 112 способным к аспирации большого объема, такого как 250 мкл, при аликвотировании.
[0374] На ФИГ. 15 представлена функциональная схема, иллюстрирующая пример способа 600 функционирования устройства 400 определения объема дозирующего наконечника. В проиллюстрированном примере способ 600 главным образом описан со ссылкой на устройство 500 определения объема аспирации образца. Однако способ 600 также аналогичным образом применим к другим типам устройств 400 определения объема дозирующего наконечника. В некоторых вариантах осуществления способ 600 осуществляется системой 510 аспирации образца и устройством 500 определения объема аспирации образца.
[0375] По существу, способ 600 выполняет анализ аспирированного в дозирующий наконечник объема с использованием измерительного алгоритма и устанавливает флаги результатов аспирации или результатов исследований, если рассчитанный объем аспирации выходит за пределы диапазона допуска.
[0376] При операции 602 система 510 аспирации образца выполняет аспирацию текучего вещества, такого как образец 540 (ФИГ. 10), в дозирующий наконечник 112 в соответствии с программой.
[0377] При операции 604 система 510 аспирации образца перемещает дозирующий наконечник 112, содержащий аспирированный образец 540, в блок 130 захвата изображения дозирующего наконечника. В некоторых вариантах осуществления блок 130 захвата изображения дозирующего наконечника выполнен с возможностью захвата изображения дозирующего наконечника 112 после аспирации без перемещения.
[0378] При операции 606 блок 130 захвата изображения дозирующего наконечника из устройства 500 определения объема аспирации образцов захватывает изображение дозирующего наконечника 112. В некоторых вариантах осуществления изображение дозирующего наконечника 112 представляет собой цифровое изображение с заданным разрешением.
[0379] При операции 608 устройство 500 определения объема аспирации образца анализирует изображение и определяет объем образца 540 внутри дозирующего наконечника 112. Пример операции 608 более подробно описан со ссылкой на ФИГ. 16–19.
[0380] При операции 610 устройство 500 определения объема аспирации образца определяет, попадает ли определенный объем в пределы диапазона допуска. Если определенный объем выходит за пределы диапазона допуска, аспирация образца 540 в дозирующий наконечник 112 считается ненадлежащей. В некоторых вариантах осуществления такой диапазон допуска определяют на основании допустимого отклонения от целевого объема аспирации образца 540, предназначенного для аспирации в дозирующий наконечник 112. Диапазон допуска может варьировать в зависимости от целевого объема аспирации. Ниже приведен пример диапазона допуска.
[0381] Таблица 1
[0382] Если определяется, что определенный объем находится в пределах диапазона допуска («ДА» при операции 610), способ 600 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 610) способ 600 переходит к операции 612.
[0383] При операции 612 устройство 500 определения объема аспирации образца устанавливает флаг аспирации, чтобы указать на то, что объем аспирированного образца в дозирующем наконечнике 112 не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовался аспирированный образец, может быть помечен флагом для указания на то, что результат исследования может быть неправильным. Альтернативно устройство 500 определения объема аспирации образца функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества. В других вариантах осуществления, как описано в настоящем документе, результат оценки может использоваться для автоматической корректировки объема текучего вещества в ответ на определение объема.
[0384] На ФИГ. 16–19 представлен пример операции 608, изображенной на ФИГ. 15, в которой захваченное изображение анализируется в соответствии с описанием для определения объема образца в дозирующем наконечнике. В частности, на ФИГ. 16 представлена функциональная схема, иллюстрирующая пример способа 630 выполнения операции 608, изображенной на ФИГ. 15. Способ 630 описан также со ссылкой на ФИГ. 17–19, которые иллюстрируют пример анализа захваченного изображения 620 дозирующего наконечника.
[0385] При операции 632 устройство 500 определения объема аспирации образца обнаруживает опорную линию 570 дозирующего наконечника 112 на захваченном изображении 620. Для обнаружения опорной линии 570 на изображении 620 могут использоваться различные способы обработки изображений. В некоторых вариантах осуществления опорная линия 570 определяется функцией сопоставления с шаблоном, которая выполняет поиск шаблона опорной линии на основании предварительного обучения по эталонному изображению. Например, такая функция сопоставления с шаблоном выполняет поиск по шаблону, которая сканирует захваченное изображение на предмет наличия шаблона, сохраненного в системе и распознанного как опорная линия. Величину корреляции или коэффициент соответствия (например, % соответствия) можно регулировать. В других вариантах осуществления также возможны другие способы. Один из примеров таких способов обработки изображений может быть реализован программным обеспечением Cognex In Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0386] При операции 634 устройство 500 определения объема аспирации образца обнаруживает центральную точку 650 опорной линии 570. Как проиллюстрировано на ФИГ. 17, после обнаружения опорной линии 570 центральную точку 650 можно рассчитать как срединную точку опорной линии 570.
[0387] При операции 636 устройство 500 определения объема аспирации образца обнаруживает уровень поверхности 652 (ФИГ. 18) аспирированного объема образца в дозирующем наконечнике 112. Для определения уровня поверхности 652 на изображении могут использоваться различные способы обработки изображений. В некоторых вариантах осуществления, аналогично операции 632, уровень поверхности 652 определяется функцией сопоставления с шаблоном на основании предварительного обучения по эталонному изображению. В других вариантах осуществления также возможны другие способы.
[0388] При операции 638 устройство 500 определения объема аспирации образца обнаруживает центральную точку 654 уровня поверхности 652. Как проиллюстрировано на ФИГ. 18, после обнаружения уровня поверхности 652 центральную точку 654 можно рассчитать как срединную точку линии уровня поверхности 652.
[0389] При операции 640 устройство 500 определения объема аспирации образца измеряет расстояние L1 (ФИГ. 19) между центральной точкой 650 опорной линии 570 и центральной точкой 654 уровня поверхности 652. В некоторых вариантах осуществления расстояние L1 измеряется расстоянием в пикселях между центральными точками 650 и 654 на изображении 620. В некоторых вариантах осуществления расстояние в пикселях рассчитывают на основании евклидова расстояния между двумя пиксельными точками.
[0390] При операции 642 устройство 500 определения объема аспирации образца преобразует расстояние L1 в объем на основании корреляционных данных 506 по объемам наконечников. Корреляционные данные 506 включают в себя информацию о корреляции между объемами внутри дозирующего наконечника 112 и расстояниями L1 между центральной точкой 650 опорной линии 570 и центральными точками 654 множества разных уровней 652 поверхности в дозирующем наконечнике 112. В некоторых вариантах осуществления по корреляционным данным 506 можно построить корреляционную кривую 660, как проиллюстрировано на ФИГ. 20. Пример способа генерации корреляционных данных 506 описан со ссылкой на ФИГ. 21.
[0391] На ФИГ. 20 представлен пример корреляционной кривой 660, соответствующей корреляционным данным 506. В некоторых вариантах осуществления корреляционная кривая 660 показывает соотношение между расстоянием L1 (например, расстоянием в пикселях) между центральными точками 650 и 654 и объемом V1 аспирированного образца в дозирующем наконечнике 112. Корреляционная кривая 660 может быть получена путем построения графика из множества дискретных точек данных, включенных в корреляционные данные 506, как описано со ссылкой на ФИГ. 21. Как проиллюстрировано на ФИГ. 20, корреляционная кривая показывает, что аспирированный объем V1 по существу уменьшается при увеличении расстояния L1. Поскольку опорная линия 570 образована на дозирующем наконечнике 112 так, что размещается над уровнем поверхности 652, расстояние L1, как правило, имеет обратную корреляцию с объемом V1.
[0392] На ФИГ. 21 представлена функциональная схема, иллюстрирующая пример способа 670 функционирования системы 504 генерации корреляционных данных по объемам наконечников для генерации корреляционных данных 506 по объемам наконечников.
[0393] В некоторых вариантах осуществления корреляционные данные 506 создаются с использованием спектроскопических методик. Например, система 504 генерации корреляционных данных по объемам наконечников использует раствор красителя для отображения корреляции между полученной информацией о расстоянии в пикселях и информацией об объеме текучего вещества в дозирующем наконечнике. Спектрофотометр можно использовать для измерения поглощения красителем света конкретной длины волны. В некоторых вариантах осуществления система 504 генерации корреляционных данных по объемам наконечников выбирает множество точек в пределах целевого диапазона объемов (например, 5, 10, 50, 100 и 110 мкл), выполняет аспирацию с этими заданными объемами в дозирующие наконечники и получает изображения дозирующих наконечников для расчета расстояния в пикселях. Затем система 504 генерации корреляционных данных по объемам наконечников использует калибровочную кривую зависимости между расстояниями в пикселях, рассчитанными на основании изображений, и объемами, рассчитанными спектрофотометром.
[0394] При операции 672 система 504 генерации корреляционных данных по объемам наконечников аспирирует раствор красителя в дозирующий наконечник 112.
[0395] При операции 674 система 504 генерации корреляционных данных по объемам наконечников захватывает изображение дозирующего наконечника 112, содержащего раствор красителя.
[0396] При операции 676 система генерации корреляционных данных по объемам наконечников 504 получает расстояние между опорной линией 570 и линией поверхности раствора красителя на изображении, захваченном при операции 674. В некоторых вариантах осуществления расстояние измеряется в пикселях. В некоторых вариантах осуществления расстояние определяется аналогично по меньшей мере некоторым из операций способа 630, таким как операции 632, 634, 636, 638 и 640. В других вариантах осуществления также возможны другие способы.
[0397] В ходе операций 678, 680 и 682 система 504 генерации корреляционных данных по объемам наконечников измеряет объем раствора красителя, аспирированного в дозирующий наконечник 112. Для определения объема раствора красителя можно использовать различные способы. В проиллюстрированном примере используются спектроскопические подходы, описанные ниже.
[0398] При операции 678 система 504 генерации корреляционных данных по объемам наконечников дозирует раствор красителя во вторичный контейнер, содержащий известный объем разбавителя.
[0399] При операции 680 система генерации корреляционных данных по объемам наконечников 504 измеряет оптическую плотность разбавленного раствора красителя, дозированного во вторичный контейнер. В некоторых вариантах осуществления для измерения оптической плотности раствора красителя используют спектрофотометр. Спектрофотометр измеряет количество света конкретной длины волны, которое проходит через разбавленный раствор красителя во вторичном контейнере.
[0400] При операции 682 система 504 генерации корреляционных данных по объемам наконечников преобразует оптическую плотность в объем раствора красителя в дозирующем наконечнике.
[0401] При операции 684 система 504 генерации корреляционных данных по объемам наконечников сопоставляет расстояние, рассчитанное при операции 676, и объем, полученный при операции 682.
[0402] При операции 686 система 504 генерации корреляционных данных по объемам наконечников определяет, было ли получено достаточное количество корреляций для генерации корреляционных данных 506 по объемам наконечников. Если да («ДА» при операции 686), то способ 670 переходит к операции 688. В противном случае («НЕТ» при операции 686) способ 670 возвращается к операции 672, в ходе которой раствор красителя аспирируют в дозирующий наконечник 112, и выполняются последующие операции для определения дополнительных корреляций между расстоянием и объемом раствора красителя в дозирующем наконечнике. Для получения достаточного диапазона корреляционных данных в разных циклах корреляции в дозирующий наконечник 112 аспирируют разные количества раствора красителя. Кроме того, количество раствора красителя, аспирированного в дозирующий наконечник, может оставаться по существу одинаковым в некоторых циклах корреляции, чтобы получить надежные результаты для конкретных объемов или диапазонов объема.
[0403] При операции 688 система 504 генерации корреляционных данных по объемам наконечников создает корреляционные данные 506 по объемам наконечников на основании множества корреляций, полученных при операции 684. В некоторых вариантах осуществления корреляционные данные представляют в виде корреляционной кривой (например, корреляционной кривой 660 на ФИГ. 20) путем построения графика зависимости расстояния в пикселях на каждом изображении от соответствующего аспирированного объема, измеренного спектрофотометром. Корреляционная кривая используется для оценки соотношения между расстоянием и объемом в дозирующем наконечнике 112.
[0404] Устройство 400 определения объема дозирующего наконечника, как описано со ссылкой на ФИГ. 9–21, может быть модифицировано так, чтобы оно подходило для различных вариантов применения. В некоторых вариантах осуществления устройство 400 определения объема дозирующего наконечника используется для любого текучего вещества, отличного от образца пациента. В некоторых вариантах осуществления блок захвата изображения дозирующего наконечника устройства 400 определения объема дозирующего наконечника не использует устройство подсветки. Дополнительно блок захвата изображения дозирующего наконечника может быть исполнен с фиксированной камерой и устройством подсветки в противоположность установке из камеры и подсветки, перемещающейся вместе с модулем пипетирования образца и другими связанными с ним устройствами. Опорная линия дозирующего наконечника может представлять собой любой объект, отличный от линии, образованной на дозирующем наконечнике. В некоторых вариантах осуществления в качестве опорной точки используется сердечник для дозирующего наконечника. В некоторых вариантах осуществления функция сопоставления с шаблоном, относящаяся к устройству 400 определения объема дозирующего наконечника, использует различные алгоритмы, такие как поиск линий или сегментов. В некоторых вариантах осуществления диапазон измеренных объемов может превышать 110 мкл. В некоторых вариантах осуществления устройство 400 определения объема дозирующего наконечника используется для любых контейнеров различных форм (например, цилиндрических, конических, прямоугольных и квадратных), отличных от пипетирующего наконечника для образца, проиллюстрированного в настоящем документе. В других вариантах осуществления система 504 генерации корреляционных данных по объемам наконечников использует любую жидкость, отличную от раствора красителя, и использует технологии, отличные от спектроскопии. Например, можно использовать наконечник JIG с множеством опорных линий, соответствующих известным объемам.
[0405] Один из примеров вышеуказанных способов обработки изображений может быть реализован программным обеспечением Cognex In–Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0406] В некоторых вариантах осуществления измеренные объемы аспирированного образца можно использовать для корректировки значений результатов исследования в относительных световых единицах (RLU). Поскольку объемы образцов (а также объемы субстрата/реагента и т. д.) коррелируют с RLU при иммуноанализе, эту корреляцию можно измерить и использовать в качестве основы для корректировки. Дополнительно измеренные объемы можно использовать в качестве обратной связи для корректировки объемов реагентов для улучшения сопоставления соотношений и повышения эффективности анализа.
[0407] На ФИГ. 22–39 представлен пример устройства 402 определения объема сосуда, изображенного на ФИГ. 5.
[0408] На ФИГ. 22 проиллюстрирован пример устройства 402 определения объема сосуда, изображенного на ФИГ. 5. В некоторых вариантах осуществления устройство 402 определения объема сосуда включает в себя устройство 700 определения объема дозирования в реакционный сосуд, устройство 702 определения остаточного объема в реакционном сосуде, устройство 704 корректировки дозирования и устройство 706 обнаружения реакционного сосуда. Устройство 700 определения объема дозирования в реакционный сосуд использует корреляционные данные 712 по объемам в сосудах, сгенерированные системой 710 генерации корреляционных данных по объемам в сосудах.
[0409] Устройство 700 определения объема дозирования в реакционный сосуд предназначено для определения объема текучего вещества 118, дозированного в сосуд 114, такой как реакционный сосуд. Пример конструкции и функционирования устройства 700 определения объема дозирования в реакционный сосуд описан и проиллюстрирован со ссылкой на ФИГ. 27–31.
[0410] Устройство 702 определения остаточного объема в реакционном сосуде предназначено для определения объема текучего вещества 118, который остается в сосуде 114, таком как реакционный сосуд. Пример устройства 702 определения остаточного объема в реакционном сосуде описан и проиллюстрирован со ссылкой на ФИГ. 32–34.
[0411] Устройство 704 корректировки дозирования функционирует с возможностью корректировки операций устройств дозирования вещества, таких как пипетки и насосные устройства, на основании измерений объемов текучих веществ, дозированных в сосуды 114, такие как реакционные сосуды. Пример устройства 704 корректировки дозирования описан и проиллюстрирован со ссылкой на ФИГ. 35 и 36.
[0412] Устройство 706 обнаружения реакционного сосуда функционирует с возможностью обнаружения наличия или отсутствия сосудов 114, таких как реакционные сосуды. Пример устройства 706 обнаружения реакционного сосуда описан и проиллюстрирован со ссылкой на ФИГ. 37–39.
[0413] Система 710 генерации корреляционных данных по объемам сосудов генерирует корреляционные данные 712 по объемам сосудов. Корреляционные данные 712 по объемам сосудов предоставляют информацию, используемую устройством 402 определения объема сосуда, для определения объема текучего вещества, дозированного в сосуд (например, в реакционный сосуд). В некоторых вариантах осуществления система 710 генерации корреляционных данных по объемам сосудов представляет собой устройство, независимое от устройства 402 определения объема сосуда. В других вариантах осуществления система 710 генерации корреляционных данных по объемам сосудов выполнена с возможностью использования по меньшей мере некоторых ресурсов устройства 402 определения объема сосуда. Система 710 генерации корреляционных данных и корреляционные данные 712 по объемам сосуда входят в состав или являются примерами системы 404 генерации корреляционных данных и корреляционных данных 406, как проиллюстрировано на ФИГ. 5.
[0414] Прежде чем перейти к ФИГ. 23–26, следует отметить, что надежная клиническая диагностика требует правильной и точной аспирации и дозирования анализируемого вещества. Например, в автоматическом анализаторе, который анализирует пробу, такую как кровь или любой другой тип физиологической жидкости, колебания количества дозируемой или аспирированной пробы и других веществ, таких как реагенты, в контейнере (например, в пипетирующем наконечнике или в реакционных сосудах) относительно заданного количества могут влиять на результат анализа и снижать надежность обследования и анализа. Дополнительно в клинической диагностической отрасли сложно правильно и точно контролировать и сопоставлять объемы текучего вещества, дозируемые разными насосными блоками. Таким образом, полезно установить технологию для измерения аспирированного или дозированного количества с высокой точностью и отбора только тех аспирированных или дозированных проб, количество которых находится в пределах подходящего диапазона. Одним из способов измерения объема жидкости является контроль давления текучего вещества в линиях подачи текучей среды и корреляция давления текучего вещества с дозированным объемом. В других случаях для определения расхода аспирированной или дозированной жидкости используется датчик расхода. В других случаях используют хемилюминесцентные сигналы при контролируемом дозировании реагентов иммуноанализа для определения присутствия чрезмерного остаточного объема в сосуде после аспирации из сосуда. В других случаях для определения характеристик объема дозирования при помощи множества насосных устройств используют хемилюминесцентные сигналы при контролируемом дозировании реагентов иммуноанализа.
[0415] Однако эти подходы имеют ряд недостатков. Например, датчики давления могут определять вязкость текучего вещества, но не могут количественно определять дозированные объемы. Датчики расхода позволяют количественно определять объем жидкости, проходящей через трубку, на которой расположены датчики расхода, но не позволяют надежно измерять объем аспирированной или дозированной жидкости. Дополнительно затруднительно сопоставить измерение малого объема на линии с точным реакционным сосудом из–за смещения местоположения. Более того, хемилюминесцентные сигналы не позволяют обнаруживать небольшие количества остаточного объема текучего вещества после аспирации. Хемилюминесцентные сигналы не обеспечивают точной прямой оценки характеристик соответствия объема между разными насосными устройствами. Хемилюминесцентные сигналы приводят к путанице между характеристиками реагентов, вариациями партий и интересующими системными переменными, такими как объем дозирования или остаточный объем.
[0416] Как более подробно описано в настоящем документе, устройство 402 определения объема сосуда использует способ обработки изображения для количественного определения аспирированного объема текучего вещества, дозированного и аспирированного в сосуд (например, реакционный сосуд). Объем текучего вещества дозируют или аспирируют в прозрачный или полупрозрачный контейнер, такой как прозрачный цилиндрический сосуд. Получают изображение сосуда и на изображении обнаруживают опорную точку. В некоторых вариантах осуществления в качестве опорной точки в пределах изображения используют нижний элемент сосуда. Устройство определения объема сосуда измеряет расстояние от мениска текучего вещества до опорной точки и сопоставляет расстояние с объемом с помощью калибровочной кривой объема. Если объем, дозированный внутрь контейнера, не соответствует требованиям к точности дозирования, то дозирование или все исследование отмечают флагом. Пользователь или оператор может получить информацию о результате дозирования.
[0417] Кроме того, измеренные объемы текучего вещества, дозированные в сосуды, регистрируют применительно к разным комбинациям насосов и пипеток в системе и используют для калибровки комбинаций насосов и пипеток с целью повышения точности управления разными насосами и пипетками в системе.
[0418] Дополнительно устройство 402 определения объема сосуда может обнаруживать присутствие очень небольших количеств остаточного текучего вещества, остающегося в сосуде после аспирации. В некоторых вариантах осуществления для такого определения остаточного объема используют алгоритмы распознавания шаблонов.
[0419] На ФИГ. 23–26 представлен пример конструкции и функционирования несущего устройства 720 для контейнеров, в состав которого входит устройство 402 определения объема сосуда.
[0420] На ФИГ. 23 проиллюстрирован пример несущего устройства 720 для контейнеров, в которое встроено устройство 402 определения объема сосуда. В проиллюстрированном примере несущее устройство 720 для контейнеров выполнено в виде промывочного колеса, такого как промывочное колесо 176 (ФИГ. 2), в приборе 100. Таким образом, в настоящем документе несущее устройство 720 для контейнеров также называют промывочным колесом 720. В вариантах осуществления с устройством 720 определения объема сосуда используются другие типы несущих устройств 402 для контейнеров.
[0421] Как проиллюстрировано, несущее устройство для контейнеров или промывочное колесо 720 выполнено с возможностью выполнения различных аспектов диагностического процесса. В некоторых вариантах осуществления промывочное колесо 720 включает в себя корпусный блок 722 и поворотную платформу 724, поворачивающуюся относительно корпусного блока 722. Промывочное колесо 720 включает в себя множество гнезд 726 для контейнеров, образованных в поворотной платформе 724 и выполненных с возможностью приема и поддержки контейнеров 728. Если несущее устройство 720 для контейнеров выполнено в виде промывочного колеса, такие контейнеры 728 включают в себя реакционные сосуды. Таким образом, контейнеры 728 в настоящем документе также называются реакционными сосудами 728.
[0422] В некоторых вариантах осуществления устройство 402 определения объема сосуда установлено на промывочном колесе 720. Как описано выше, устройство 402 определения объема сосуда включает в себя блок 132 захвата изображения сосуда. Пример конструкции блока 132 захвата изображения сосуда более подробно описан со ссылкой на ФИГ. 24 и 25.
[0423] На ФИГ. 24 и 25 представлен пример конструкции описанного устройства 402 определения объема сосуда, включающего в себя блок 132 захвата изображения сосуда. В частности, на ФИГ. 24 представлен другой вид в перспективе несущего устройства 720 для контейнеров, изображенного на ФИГ. 23, на котором проиллюстрирован блок 132 захвата изображения сосуда, а на ФИГ. 25 представлен вид сверху промывочного колеса 720 с устройством 402 определения объема сосуда, включающим в себя блок 132 захвата изображения сосуда.
[0424] Блок 132 захвата изображения сосуда включает в себя блок 730 камеры и источник 732 света. В некоторых вариантах осуществления блок 730 камеры включает в себя дополнительный металл–оксидный полупроводниковый (CMOS) датчик изображения для получения цветного цифрового изображения. В других вариантах осуществления блок 730 камеры включает в себя датчик изображения на основе прибора с зарядовой связью (CCD) для получения цветного цифрового изображения. Другие варианты осуществления блока 730 камеры выполнены с возможностью получения черно–белых изображений или изображений в оттенках серого. Источник 732 света используется для освещения сосуда 728, прорези 736 и/или окружения сосуда 728 и/или прорези 736, которые нужно сфотографировать. Источник 732 света может быть фиксирован в различных местоположениях. В проиллюстрированном примере источник света 732 расположен позади сосуда 728, обращен к блоку 730 камеры и, таким образом, используется в качестве подсветки. Также возможны и другие местоположения источника 732 света. Одним примером источника 732 света является серия MDBL, доступная от компании Moritex Corporation (Япония).
[0425] В других вариантах осуществления блок 730 камеры включает в себя источник 731 света, такой как светодиодный осветитель, выполненный с возможностью излучения света в сторону сосуда 728. В этой конфигурации источник 732 света может быть заменен на экран 733, который расположен напротив блока 730 камеры таким образом, что сосуд 728 расположен между блоком 730 камеры и экраном 733. Экран 733 используется для отбрасывания света обратно в направлении поля зрения (FOV) камеры путем отражения света в направлении апертуры камеры. Экран 733 выполнен из одного или более различных материалов, которые могут обеспечивать разные значения интенсивности отражения. Например, экран 733 включает в себя светоотражающий лист, одним примером которого является 3M™ Scotchlite™ Sheeting 7610, доступный от компании 3M (г. Мейплвуд, штат Миннесота, США). В другом варианте осуществления источник 732 света можно использовать вместе с источником 731 света от блока 730 камеры и экраном 733. Один пример блока 730 камеры включает в себя модель ADVANTAGE 102, доступную от компании Cognex Corporation (г. Натик, штат Массачусетс, США).
[0426] В некоторых вариантах осуществления блок 730 камеры и источник 732 света (или экран 733) прикреплены к корпусному блоку 722 промывочного колеса 720. Блок 730 камеры и источник света 732 (или экран 733) расположены таким образом, что реакционные сосуды 728, поддерживаемые поворотной платформой 724, расположены между блоком 730 камеры и источником 732 света (или экраном 733) при повороте поворотной платформы 724 относительно корпусного блока 722.
[0427] В некоторых вариантах осуществления корпусный блок 722 образует прорезь 736, которая открывает один из реакционных сосудов 728 между блоком 730 камеры и источником 732 света (или экраном 733). Когда реакционный сосуд 728 выравнивается с блоком 730 камеры и источником 732 света (или экраном 733) через прорезь 736 корпусного блока 722, изображение реакционного сосуда 728 может быть захвачено блоком 730 камеры. В других вариантах осуществления, в которых корпусный блок 722 выполнен из непрозрачного материала, корпусный блок 722 включает в себя прозрачную или полупрозрачную область, которая заменяет прорезь 736. Прозрачная или полупрозрачная область позволяет блоку 730 камеры захватывать изображение через нее.
[0428] Одним из примеров блока 730 камеры является камера ADV102 Machine Vision Camera, такая как с № по кат. ADV102–CQBCKFW1–B, доступная от компании Cognex Corporation (г. Натик, штат Массачусетс, США).
[0429] Как описано выше, образцы пациента, содержащиеся в реакционных сосудах, транспортируются между различными модулями, блоками или устройствами в приборе 100. Различные аспекты диагностического процесса в приборе 100 выполняются в промывочном колесе 720. Промывочное колесо 720 транспортирует по кругу множество реакционных сосудов 728. Реакционные сосуды 728 на промывочном колесе 720 могут соответствовать множеству результатов исследования. В этой конфигурации блок 730 камеры и источник 732 света (или экран 733) неподвижно прикреплены к промывочному колесу 720. Блок 730 камеры обращен в то место промывочного колеса 720, где расположен источник 732 света (или экран 733). Блок 730 камеры захватывает изображение реакционного сосуда 728, перемещающегося по полю зрения (FOV) блока 730 камеры между блоком 730 камеры и источником 732 света (или экраном 733). В некоторых вариантах осуществления реакционный сосуд 728 становится неподвижным, когда изображение реакционного сосуда 728 захватывается блоком 730 камеры. В других вариантах осуществления блок 730 камеры захватывает изображение реакционного сосуда 728 во время перемещения реакционного сосуда 728. Изображение реакционного сосуда может захватываться для каждого реакционного сосуда 728. Блок 730 камеры выполняет изображения на множестве стадий диагностических процессов, по мере того как поворотная платформа 724 поворачивается относительно корпусного блока 722. В некоторых вариантах осуществления реакционный сосуд можно поместить в местоположение между блоком 730 камеры и источником 732 света (или экраном 733) (например, гнездом 726 контейнера, расположенным в прорези 736), когда диагностические процессы не выполняются.
[0430] Промывочное колесо 720 функционирует в разных рабочих режимах. В некоторых вариантах осуществления промывочное колесо 720 функционирует в режиме обработки исследования или в режиме диагностической процедуры. В других вариантах осуществления промывочное колесо 720 функционирует в режиме подготовки к исследованию, таком как заполнение. В режиме обработки исследования промывочное колесо 720 удерживает один или более сосудов на поворотной платформе 724 и поворачивает сосуды для заданных аналитических исследований. В режиме диагностической процедуры, который в настоящем документе также называется автоматизированной диагностикой системы (ASD), прибор 100 находится в состоянии бездействия и не выполняет исследования. В некоторых вариантах осуществления в режиме диагностической процедуры промывочное колесо 720 функционирует с возможностью выполнения по меньшей мере одной из операций системы 104 оценки подготовки, такой как определение объема дозирования в сосуды (например, с помощью устройства 700 определения объема дозирования в реакционный сосуд), определение остаточного объема в сосуде (например, с помощью устройства 702 определения остаточного объема в реакционном сосуде), корректировка дозирования (например, с помощью устройства 704 корректировки дозирования) и обнаружение сосуда (например, с помощью устройства 706 обнаружения реакционного сосуда). В других вариантах осуществления операции системы 104 оценки подготовки могут выполняться в режиме обработки исследования.
[0431] В некоторых вариантах осуществления промывочное колесо 720 функционирует со множеством дозирующих наконечников, которые могут иметь разные профили и точность на основании своих гидравлических характеристик. В режиме обработки исследования два или более из множества дозирующих наконечников могут дозировать вещества в сосуды на промывочном колесе 720. В режиме диагностической процедуры наконечники для дозирования могут функционировать независимо, и, таким образом, можно отслеживать и оценивать рабочее состояние каждого дозирующего наконечника, например, при корректировке дозирования, выполняемой, например, устройством 704 корректировки дозирования.
[0432] На ФИГ. 26 представлена функциональная схема, иллюстрирующая пример способа 750 функционирования устройства 402 определения объема сосуда с промывочным колесом 720. В некоторых вариантах осуществления по меньшей мере некоторые из операций в способе 750 выполняются системой 102 подготовки вещества, системой 104 оценки подготовки и/или системой 106 оценки вещества в приборе 100. В других вариантах осуществления для выполнения по меньшей мере одной из операций в способе 750 используются другие компоненты, блоки и устройства прибора 100. В некоторых вариантах осуществления способ 750 включает в себя операции 752, 754, 756, 758 и 760.
[0433] При операции 752 система 102 подготовки вещества функционирует с возможностью аспирации избыточного объема текучего вещества из реакционного сосуда 738 на промывочном колесе 720. В некоторых вариантах осуществления избыточный объем текучего вещества остается внутри реакционного сосуда 738 после одной или более заданных аналитических процедур на промывочном колесе 720. Такой избыточный объем вещества в реакционном сосуде необходимо удалить из реакционного сосуда 738 для последующих процессов, например, перед дозированием субстрата в реакционный сосуд, как проиллюстрировано на ФИГ. 4.
[0434] При операции 754 система 102 подготовки вещества перемещает реакционный сосуд 738 в блок 132 захвата изображения сосуда на промывочном колесе 720.
[0435] При операции 746 устройство 402 определения объема сосуда выполняет определение остаточного объема в реакционном сосуде 738. В некоторых вариантах осуществления устройство 702 определения остаточного объема в реакционном сосуде функционирует с возможностью выполнения определения остаточного объема.
[0436] При операции 748 система 102 подготовки вещества функционирует с возможностью дозирования текучего вещества (например, субстрата, как проиллюстрировано на ФИГ. 4) в реакционный сосуд 738.
[0437] При операции 760 устройство 402 определения объема сосуда выполняет определение объема дозирования в реакционный сосуд 738. В некоторых вариантах осуществления устройство 700 определения объема дозирования в реакционный сосуд выполняет функцию определения объема дозирования.
[0438] На ФИГ. 27 представлена функциональная схема, иллюстрирующая пример способа 800 функционирования устройства 700 определения объема дозирования в реакционный сосуд. Хотя способ 800 главным образом описан применительно к устройству 700 определения объема дозирования в реакционный сосуд, способ 600 также аналогичным образом применим и к другим типам устройства 402 определения объема сосуда. В некоторых вариантах осуществления способ 800 осуществляют с помощью несущего устройства 720 для контейнеров (например, промывочного колеса) и устройства 700 определения объема дозирования в реакционный сосуд.
[0439] Как правило, способ 800 осуществляет анализ объема текучего вещества, дозируемого или аспирируемого в сосуд, и отмечает флагом результаты дозирования или аспирации или результаты исследования, если рассчитанный объем выходит за пределы диапазона допуска.
[0440] При операции 802 текучее вещество дозируют в реакционный сосуд 728, поддерживаемый в, например, несущем устройстве 720 для контейнеров, в соответствии с программой. Примеры текучего вещества включают в себя образец, разбавитель, реагент, субстрат или любую их комбинацию, описанную в настоящем документе. Например, в диагностическом режиме промывочного колеса используют разбавители или реагенты.
[0441] При операции 804 несущее устройство 720 для контейнеров перемещает реакционный сосуд 738, содержащий дозированное вещество, в блок 132 захвата изображения сосуда. В некоторых вариантах осуществления блок 132 захвата изображения сосуда размещен с возможностью захвата изображения реакционного сосуда 738 после дозирования без транспортировки. В других вариантах осуществления дозирование при операции 802 происходит в местоположении, где размещен блок 132 захвата изображения сосуда, и захват изображения реакционного сосуда 738 происходит без перемещения реакционного сосуда 738 после дозирования.
[0442] При операции 806 блок 132 захвата изображения сосуда устройства 700 определения объема дозирования в реакционный сосуд захватывает изображение реакционного сосуда 738. В некоторых вариантах осуществления изображение реакционного сосуда 738 представляет собой цифровое изображение с заданным разрешением.
[0443] При операции 808 устройство 700 определения объема дозирования в реакционный сосуд анализирует изображение и определяет объем текучего вещества внутри реакционного сосуда 738. Пример операции 808 более подробно описан со ссылкой на ФИГ. 28 и 29.
[0444] При операции 810 устройство 700 определения объема дозирования в реакционный сосуд определяет, находится ли определенный объем в пределах диапазона допуска. Если определенный объем выходит за пределы диапазона допуска, дозирование текучего вещества в реакционный сосуд 738 считается неверным. В некоторых вариантах осуществления такой диапазон допуска определяют на основании допустимого отклонения от целевого объема дозирования текучего вещества, предназначенного для дозирования в реакционный сосуд 738. Диапазон допуска может варьировать в зависимости от целевого объема аспирации и других факторов. В качестве примера, если целевой объем дозирования (V) составляет 200 мкл, считается приемлемым, если 194 мкл ≤ V ≤ 206 мкл. В других примерах считается приемлемым, если стандартное отклонение (V(n)) равно или меньше ± 1 мкл.
[0445] Если определяется, что определенный объем находится в пределах диапазона допуска («ДА» при операции 810), способ 800 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 810) способ 800 переходит к операции 812.
[0446] При операции 812 устройство 700 определения объема дозирования в реакционный сосуд устанавливает флаг дозирования, чтобы указать на то, что дозированный объем в реакционном сосуде 738 не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовалось дозированное текучее вещество, может быть помечен флагом для указания или предположения того, что результат исследования может быть неправильным. Альтернативно устройство 700 определения объема дозирования в реакционный сосуд функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за несоответствующего объема текучего вещества (например, в пределах некоторого диапазона объемов значения RLU пропорциональны объему субстрата, в определенный момент превышают диапазон апертуры люминометра, а затем выходят на плато и уменьшаются из–за коэффициента разбавления). В других вариантах осуществления результат оценки может использоваться для автоматической корректировки объема текучего вещества в ответ на определение объема.
[0447] На ФИГ. 28 и 29 представлен пример операции 808, изображенной ФИГ. 27, в которой для определения дозированного объема в реакционном сосуде анализируется захваченное изображение. В частности, на ФИГ. 28 представлена функциональная схема, иллюстрирующая пример способа 830 выполнения операции 608, изображенной на ФИГ. 27. Способ 830 описан также со ссылкой на ФИГ. 29, на которой проиллюстрирован пример анализа захваченного изображения 780 реакционного сосуда.
[0448] При операции 832 устройство 700 определения объема дозирования в реакционный сосуд обнаруживает опорный участок 784 реакционного сосуда 738 на захваченном изображении 780. В некоторых вариантах осуществления опорный участок 784 включает в себя нижнюю часть реакционного сосуда 738. В качестве опорного участка 784 могут использоваться другие части реакционного сосуда 738.
[0449] Для обнаружения нижней части 784 на изображении 780 можно использовать различные способы обработки изображений. В некоторых вариантах осуществления нижняя часть 784 определяется функцией сопоставления с шаблоном, которая выполняет поиск шаблона нижней части на основании предварительного обучения по эталонному изображению. Например, такая функция сопоставления с шаблоном выполняет поиск по шаблону, во время которого захваченное изображение сканируется на предмет наличия шаблона, сохраненного в системе и распознаваемого как нижняя часть. Величину корреляции или коэффициент соответствия (например, % соответствия) можно регулировать. В других вариантах осуществления также возможны другие способы. Один из примеров таких способов обработки изображений может быть реализован программным обеспечением Cognex In Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0450] При операции 834 устройство 700 определения объема дозирования в реакционный сосуд обнаруживает центральную точку 786 нижней части 784. Как проиллюстрировано на ФИГ. 29, после обнаружения нижней части 784 центральная точка 786 может быть рассчитана как срединная точка нижней части 784.
[0451] При операции 836 устройство 700 определения объема дозирования в реакционный сосуд обнаруживает уровень поверхности 788 (ФИГ. 29) дозированного объема в реакционном сосуде 738. Для обнаружения уровня поверхности 788 на изображении 780 можно использовать различные способы обработки изображений. В некоторых вариантах осуществления, аналогично операции 832, уровень 788 поверхности определяется функцией сопоставления с шаблоном на основании предварительного обучения по эталонному изображению. В других вариантах осуществления также возможны другие способы.
[0452] При операции 838 устройство 700 определения объема дозирования в реакционный сосуд обнаруживает центральную точку 790 уровня 788 поверхности. Как проиллюстрировано на ФИГ. 29, после обнаружения уровня 788 поверхности центральную точку 790 можно рассчитать как срединную точку линии уровня поверхности 788.
[0453] При операции 840 устройство 700 определения объема дозирования в реакционный сосуд измеряет расстояние L2 (ФИГ. 29) между центральной точкой 786 нижней части 784 и центральной точкой 790 уровня 788 поверхности. В некоторых вариантах осуществления расстояние L2 измеряется в пикселях между центральными точками 786 и 790 на изображении 780. В некоторых вариантах осуществления расстояние в пикселях рассчитывают на основании евклидова расстояния между двумя пиксельными точками.
[0454] При операции 842 устройство 700 определения объема дозирования в реакционный сосуд преобразует расстояние L2 в объем на основании корреляционных данных 712 по объемам сосудов (ФИГ. 22). Корреляционные данные 712 включают в себя информацию о корреляции между объемами внутри реакционного сосуда 738 и расстояниями L2 между центральной точкой 786 нижней части 784 и центральными точками 790 множества разных уровней 788 поверхности в реакционном сосуде 738. В некоторых вариантах осуществления по корреляционным данным 712 можно построить корреляционную кривую 860, как проиллюстрировано на ФИГ. 30. Пример способа генерации корреляционных данных 712 описан со ссылкой на ФИГ. 31.
[0455] На ФИГ. 30 представлен пример корреляционной кривой 860, соответствующей корреляционным данным 712. В некоторых вариантах осуществления корреляционная кривая 860 показывает соотношение между расстоянием L2 (например, расстоянием в пикселях) между центральными точками 786 и 790 и объемом V2 дозированного текучего вещества 782 в реакционном сосуде 738. В проиллюстрированном примере корреляционная кривая 860 указывает соотношение между массой текучего вещества, дозированного в реакционный сосуд 738, и высотой в пикселях текучего вещества в реакционном сосуде 738. Массу можно преобразовать в объем на основании плотности текучего вещества. Высота в пикселях текучего вещества в реакционном сосуде соответствует расстоянию D2.
[0456] Корреляционная кривая 860 может быть получена путем построения графика из множества дискретных точек данных, включенных в корреляционные данные 712, как описано со ссылкой на ФИГ. 31. Как проиллюстрировано на ФИГ. 30, корреляционная кривая указывает на то, что объем V2 дозирования (или масса M2) по существу увеличивается по мере увеличения расстояния L2. Поскольку в качестве опорной точки выбрана нижняя часть 784 реакционного сосуда 738, расстояние L2 по существу линейно коррелирует с объемом V2 (или массой M2). Например, расстояние L2 и объем V2 по существу линейно коррелируют с объемами более 10 мкл.
[0457] На ФИГ. 31 представлена функциональная схема, иллюстрирующая пример способа 870 функционирования системы 710 генерации корреляционных данных по объемам сосудов для генерации корреляционных данных 712 по объемам сосудов.
[0458] В некоторых вариантах осуществления корреляционные данные 712 создают с использованием гравиметрического анализа. Например, система 710 генерации корреляционных данных по объемам сосудов использует разные объемы текучего вещества для отображения корреляции между полученной информацией о расстоянии в пикселях и информацией об объеме текучего вещества внутри сосуда. В некоторых вариантах осуществления система 710 генерации корреляционных данных по объемам в сосудах выбирает множество точек в пределах целевого диапазона значений (например, 190, 195, 200, 205 и 210 мкл), дозирует эти установленные объемы в сосуды и получает изображения сосудов для расчета расстояния в пикселях. Затем система 710 генерации корреляционных данных по объемам сосудов строит калибровочную кривую зависимости между расстояниями в пикселях, рассчитанными на основании изображений, и массами, измеренными гравиметрическим анализом. Затем массу преобразуют в объем с использованием плотности текучего вещества.
[0459] При операции 872 система 710 генерации корреляционных данных по объемам сосудов измеряет массу пустого сосуда, такого как реакционный сосуд 738.
[0460] При операции 874 система 710 генерации корреляционных данных по объемам сосудов дозирует текучую среду в сосуд.
[0461] При операции 876 система 710 генерации корреляционных данных по объемам сосудов захватывает изображение сосуда, содержащего текучую среду.
[0462] При операции 878 система 710 генерации корреляционных данных по объемам в сосудах получает расстояние между опорным участком сосуда, таким как нижняя часть 784 реакционного сосуда 738, и линией поверхности текучего вещества на изображении, захваченном во время операции 876. В некоторых вариантах осуществления расстояние измеряется в пикселях. В некоторых вариантах осуществления расстояние определяется аналогично по меньшей мере некоторым из операций способа 830, таким как операции 832, 834, 836, 838 и 840. В других вариантах осуществления также возможны другие способы.
[0463] В ходе операций 880, 882 и 884 система 710 генерации корреляционных данных по объемам в сосудах измеряет объем текучей среды, дозированной в сосуд. Для определения объема текучей среды можно использовать различные способы. В проиллюстрированном примере используют гравиметрические подходы, описанные ниже.
[0464] При операции 880 система 710 генерации корреляционных данных по объемам сосудов измеряет массу сосуда, содержащего дозированную текучую среду.
[0465] При операции 882 система 710 генерации корреляционных данных по объемам сосудов рассчитывает массу текучей среды, содержащейся в сосуде. В некоторых вариантах осуществления массу текучей среды в сосуде можно рассчитать, вычитая массу пустого сосуда (полученную при операции 872) из общей массы сосуда, содержащего текучую среду (полученной при операции 880).
[0466] При операции 884 система 710 генерации корреляционных данных по объемам сосудов преобразует массу текучей среды в объем на основании плотности текучей среды.
[0467] При операции 886 система 710 генерации корреляционных данных по объемам в сосудах соотносит расстояние, рассчитанное при операции 878, и объем, полученный при операции 884.
[0468] При операции 888 система 710 генерации корреляционных данных по объемам сосудов определяет, было ли получено достаточное количество корреляций для генерации корреляционных данных 712 по объемам сосудов. Если да («ДА» при операции 888), то способ 870 переходит к операции 890. В противном случае («НЕТ» при операции 888) способ 870 возвращается к операции 874, в ходе которой в сосуд дозируют другую текучую среду, и выполняют последующие операции для определения дополнительных корреляций между расстоянием и объемом текучей среды внутри сосуда. Для получения достаточного диапазона корреляционных данных в сосуд в разных циклах корреляции дозируют разные количества текучей среды. Кроме того, количество текучей среды, дозируемой в сосуд в некоторых циклах корреляции, может оставаться неизменным, чтобы получить надежные результаты корреляции.
[0469] При операции 890 система 710 генерации корреляционных данных по объемам сосудов создает корреляционные данные 712 по объемам сосудов на основании множества корреляций, полученных при операции 886. В некоторых вариантах осуществления корреляционные данные 712 проиллюстрированы в виде корреляционной кривой (например, корреляционной кривой 860 на ФИГ. 30) путем построения для каждого изображения графика зависимости расстояния в пикселях от соответствующего объема дозирования. Кривая корреляции используется для оценки соотношения между расстоянием и объемом в сосуде.
[0470] На ФИГ. 32–34 в качестве примера представлено функционирование устройства 702 определения остаточного объема в реакционном сосуде.
[0471] На ФИГ. 32 представлена функциональная схема, иллюстрирующая пример способа 900 функционирования устройства 702 определения остаточного объема в реакционном сосуде. В некоторых вариантах осуществления способ 900 включает в себя операции 902, 904, 906, 908, 910 и 912.
[0472] Как правило, способ 900 выполняет анализ сосуда и определяет, содержит ли сосуд остаточный объем после аспирации. Если сосуд содержит объем, который выходит за пределы диапазона допуска, то результат аспирации или результат исследования помечаются флагом.
[0473] При операции 902 устройство 702 определения остаточного объема в реакционном сосуде аспирирует вещество из сосуда, такого как реакционный сосуд 738.
[0474] При операции 904 устройство 702 определения остаточного объема в реакционном сосуде перемещает сосуд в блок 132 захвата изображения сосуда. В некоторых вариантах осуществления блок 132 захвата изображения сосуда размещен с возможностью захвата изображения сосуда после аспирации без транспортировки. В других вариантах осуществления аспирация при операции 902 происходит в том местоположении, где размещен блок 132 захвата изображения сосуда, захват изображение сосуда происходит без перемещения сосуда после аспирации.
[0475] При операции 906 блок 132 захвата изображения сосуда захватывает изображение сосуда. В некоторых вариантах осуществления изображение сосуда представляет собой цифровое изображение с заданным разрешением.
[0476] При операции 908 устройство 702 определения остаточного объема в реакционном сосуде анализирует изображение для определения наличия вещества внутри сосуда. Пример операции 908 более подробно описан со ссылкой на ФИГ. 33 и 34.
[0477] При операции 910 устройство 702 определения остаточного объема в реакционном сосуде определяет, попадает ли остаточный объем в диапазон допуска. Если остаточный объем выходит за пределы диапазона допуска, аспирация вещества из сосуда считается неправильной. Диапазон допуска представляет собой диапазон остаточного объема в реакционном сосуде, который является допустимым для приемлемого результата исследования. Например, для получения приемлемых результатов исследования не следует выполнять аспирацию из реакционного сосуда так, чтобы он становился полностью пустым. В некоторых вариантах осуществления такой диапазон допуска определяют по балльной оценке соответствия шаблону между захваченным изображением и изображением, по которому проводилось предварительное обучение, как дополнительно описано на ФИГ. 33. В качестве примера, если считается приемлемым остаточный объем в реакционном сосуде 4 мкл или менее, то в качестве порогового значения приемлемости будет использоваться балл соответствия шаблону, который можно интерпретировать как сходство с изображением реакционного сосуда, содержащего объем 4 мкл.
[0478] Если определяется, что присутствующий остаточный объем находится в пределах диапазона допуска («ДА» при операции 910), то способ 900 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 910) способ 900 переходит к операции 812.
[0479] При операции 912 устройство 702 определения остаточного объема в реакционном сосуде отмечает флагом результат аспирации, указывая на то, что аспирация из сосуда не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовался сосуд с проведенной аспирацией, может быть помечен флагом для указания на то, что результат исследования может быть неправильным. Альтернативно устройство 702 определения остаточного объема в реакционном сосуде функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества.
[0480] На ФИГ. 33 и 34 представлен пример операции 908, изображенной на ФИГ. 32, в которой анализируется захваченное изображение для определения остатка 952 внутри сосуда. В частности, на ФИГ. 33 представлена функциональная схема, иллюстрирующая пример способа 930 выполнения операции 908, изображенной на ФИГ. 32. Способ 930 описан также со ссылкой на ФИГ. 34, на котором проиллюстрирован пример анализа захваченного изображения 942 сосуда.
[0481] При операции 932 устройство 702 определения остаточного объема в реакционном сосуде обнаруживает область интереса 946 на захваченном изображении 942. В некоторых вариантах осуществления область интереса 946 включает в себя нижнюю часть сосуда 944. В некоторых вариантах осуществления сосуд 944 на изображении представляет описанный выше реакционный сосуд 738. В качестве опорного участка 784 могут использоваться другие части реакционного сосуда 738.
[0482] Для обнаружения нижней части 946 на изображении 942 можно использовать различные способы обработки изображений. В некоторых вариантах осуществления нижняя часть 946 определяется функцией сопоставления с шаблоном, которая выполняет поиск шаблона нижней части на основании предварительного обучения по эталонному изображению. Например, такая функция сопоставления с шаблоном выполняет поиск по шаблону, во время которого захваченное изображение сканируется на предмет наличия шаблона, сохраненного в системе и распознаваемого как нижняя часть. Величину корреляции или коэффициент соответствия (например, % соответствия) можно регулировать. В других вариантах осуществления также возможны другие способы. Один из примеров таких способов обработки изображений может быть реализован программным обеспечением Cognex In Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0483] При операции 934 устройство 702 определения остаточного объема в реакционном сосуде сравнивает область интереса 946 с эталонным изображением 948. В некоторых вариантах осуществления эталонное изображение 948 включает в себя часть 950, соответствующую области интереса 946. В других вариантах осуществления эталонное изображение 948 представляет собой только часть 950, соответствующую области интереса 946 на захваченном изображении 942.
[0484] В некоторых вариантах осуществления эталонное изображение 948 представляет собой изображение того же сосуда 944, который является пустым. Поскольку идеальная аспирация не оставляет остатков текучей среды в нижней части сосуда 944, в качестве эталонного изображения 948 используется предварительно подготовленное изображение пустого сосуда 944. В других вариантах осуществления в качестве эталонного изображения 948 могут использоваться другие изображения.
[0485] При операции 936 устройство 702 определения остаточного объема в реакционном сосуде генерирует балльную оценку соответствия между захваченным изображением 942 и эталонным изображением 948. Балльная оценка соответствия представляет степень соответствия захваченного изображения 942 эталонному изображению 948. Балльную оценку соответствия используют в качестве показателя для определения отсечки по присутствию чрезмерного количества остаточной текучей среды в сосуде.
[0486] При операции 938 устройство 702 определения остаточного объема в реакционном сосуде определяет, соответствует ли балльная оценка соответствия пороговому значению. Если балльная оценка соответствия удовлетворяет пороговому значению («ДА» при операции 938), считается, что в сосуде отсутствует остаточная текучая среда или присутствует приемлемое количество остаточной текучей среды, и способ 930 переходит к следующей заданной стадии. В противном случае («НЕТ» при операции 938) способ 930 продолжает операцию 940. Например, если балльная оценка соответствия ниже заданного порогового значения или значения отсечки, считается, что в сосуде присутствует избыток остаточной текучей среды, и способ 930 переходит к операции 940.
[0487] При операции 940 устройство 702 определения остаточного объема в реакционном сосуде отмечает флагом результат аспирации, указывая на то, что аспирация из сосуда не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовался сосуд с проведенной аспирацией, может быть помечен флагом для указания на то, что результат исследования может быть неправильным. Альтернативно устройство 702 определения остаточного объема в реакционном сосуде функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества.
[0488] Альтернативно в способе 930 используются другие подходы для выполнения сравнения изображения и назначения значений отсечки. В примерах таких подходов используются обычные инструменты классификации, такие как логистическая регрессия, метод опорных векторов, нейронные сети, сверточные нейронные сети и классификационные деревья.
[0489] На ФИГ. 35 и 36 представлен пример операции устройства 704 корректировки дозирования.
[0490] На ФИГ. 35 представлена функциональная схема примера системы 960, в которой функционирует устройство 704 корректировки дозирования.
[0491] Как правило, устройство 704 корректировки дозирования может использовать возможности измерения объема, предоставляемые блоком 132 захвата изображения сосуда, для выполнения автономной корректировки пипеток и насосов, таким образом улучшая погрешность пипетирования и повышая общую точность системы. В проиллюстрированном примере в сосуде выполняют дозирование одного или множества объемов, после чего сосуд перемещают в промывочное колесо для измерения. Получают результаты измерений объемов, которые могут выполняться устройством 700 определения объема дозирования в реакционный сосуд, как описано выше, и устройство 704 корректировки дозирования определяет погрешность для каждой комбинации насосов и пипеток. В некоторых вариантах осуществления для корректировки рабочих параметров комбинаций насосов и пипеток используют измеренные объемы, относящиеся к насосам. В качестве примера, можно скорректировать шаговое разрешение каждого насоса или можно добавить смещения к программным инструкциям для каждого насоса. После корректировки устройство 704 корректировки дозирования может снова проверить насосы на предмет их погрешности и при необходимости снова выполнить коррекцию. В некоторых вариантах осуществления устройство 704 корректировки дозирования выполняет такие корректирующие операции, пока на приборе не проводится клиническое исследование. В других вариантах осуществления устройство 704 корректировки дозирования выполняет операции по корректировке во время инициализации прибора. В некоторых вариантах осуществления устройство 704 корректировки дозирования периодически выполняет операции по корректировке и отслеживает тенденции для характеристик насоса таким образом, чтобы пользователь или сервисный отдел мог удаленно отслеживать состояние и принимать решения об обслуживании, например, о том, когда следует отправлять сервисного специалиста для технического обслуживания или замены деталей.
[0492] Как проиллюстрировано на ФИГ. 35, система 102 подготовки вещества дозирует текучие вещества 118 в один или более сосудов 114 (например, реакционных сосудов 728 на промывочном колесе). Затем устройство 700 определения объема дозирования в реакционный сосуд выполняет измерения объема в сосудах 114, как описано в настоящем документе, и подает результат измерений 962 объема на устройство 704 корректировки дозирования. В некоторых вариантах осуществления устройство 704 корректировки дозирования анализирует результат измерений объема 962 и генерирует калибровочную информацию 964, которую затем можно использовать для калибровки системы 102 подготовки вещества с целью повышения точности дозирования.
[0493] На ФИГ. 36 представлена функциональная схема, иллюстрирующая пример способа 970 функционирования устройства 704 корректировки дозирования. В некоторых вариантах осуществления способ 970 включает в себя операции 972, 974, 976, 978, 980 и 982.
[0494] При операции 972 устройство 704 корректировки дозирования получает один или более рабочих параметров системы 102 подготовки вещества. Как описано выше, система 102 подготовки вещества включает в себя одно или более устройств дозирования вещества, таких как устройство 152 пипетирования образцов, устройство пипетирования реагента и устройство 178 пипетирования субстрата, которые служат для дозирования текучих веществ 118 в сосуды 114. Рабочие параметры включают в себя различную информацию о конфигурациях, настройках и рабочем состоянии устройств дозирования вещества. В некоторых вариантах осуществления такие устройства дозирования вещества включают в себя насосные устройства, которые обеспечивают работу блоков дозирования (например, пипеток). Некоторые примеры насосных устройств управляются двигателями различных типов, такими как шаговые двигатели. В тех случаях, когда используются шаговые двигатели, рабочие параметры могут включать в себя шаговое разрешение, и они контролируются с целью корректировки количества, дозируемого через пипетки.
[0495] При операции 974 устройство 704 корректировки дозирования принимает целевые объемы дозирования текучих веществ 118. Целевые объемы дозирования представляют собой объемы текучего вещества 118, которые предназначены для дозирования в сосуды 114, на основании рабочих параметров устройств дозирования вещества.
[0496] При операции 976 устройство 704 корректировки дозирования принимает определенные объемы, дозированные в сосуды 114.
[0497] При операции 978 устройство 704 корректировки дозирования сравнивает определенные объемы с целевыми объемами. В качестве примера, первое устройство дозирования вещества, которое включает в себя первое насосное устройство, использующее первую пипетку, выполнено с возможностью дозирования целевого объема 100 мкл в сосуд. После дозирования объема было определено, что дозированный в сосуд объем составил 99,9 мкл. Далее устройство 704 корректировки дозирования сравнивает целевой объем 100 мкл с определенным объемом 99,9 мкл и определяет наличие расхождения 0,1 мкл между целевым и определенным объемами в первом устройстве дозирования вещества.
[0498] В некоторых вариантах осуществления множество дозирующих экземпляров одного устройства дозирования вещества считается группой. В качестве примера, конкретное устройство дозирования вещества выполняет первое дозирование, второе дозирование и третье дозирование с использованием насосного устройства и сосуда (или трех сосудов) с целевым объемом 100 мкл. После трех дозирований определено, что дозированный объем, поданный в сосуд, составляет 100,5 мкл в первом случае дозирования, 99,5 мкл во втором случае дозирования и 100 мкл в третьем случае дозирования. В некоторых вариантах осуществления для калибровки устройства дозирования вещества можно использовать все из определенных объемов вместе. Например, стандартное отклонение трех определенных объемов (например, 0,5 мкл в этом примере) может использоваться для калибровки устройства дозирования вещества, например, корректировки шагового разрешения его шагового двигателя. В этом примере для уменьшения стандартного отклонения генерируется и используется калибровочная информация 964. В других вариантах осуществления, как описано выше, каждый из определенных объемов можно использовать для калибровки устройства дозирования вещества для каждого случая дозирования.
[0499] В других вариантах осуществления множество событий дозирования множеством устройств дозирования вещества рассматриваются как группа. В качестве примера, первое устройство дозирования вещества выполняет первое дозирование, второе устройство дозирования вещества выполняет второе дозирование и третье устройство дозирования вещества выполняет третье дозирование с целевым объемом 100 мкл. После дозирования обнаружено, что объем, дозированный первым устройством дозирования вещества, равен 100,5 мкл, объем, дозированный вторым устройством дозирования вещества, равен 99,5 мкл, а объем, дозированный третьим устройством дозирования вещества, равен 100 мкл. В некоторых вариантах осуществления для калибровки устройств дозирования вещества можно использовать все из определенных объемов вместе. Например, стандартное отклонение трех определенных объемов (например, 0,5 мкл в этом примере) может использоваться для калибровки устройств дозирования вещества, например, корректировки шаговых разрешений их шаговых двигателей. В этом примере для уменьшения стандартного отклонения генерируется и используется калибровочная информация 964. В других вариантах осуществления, как описано выше, определенные объемы можно использовать для калибровки соответствующих устройств дозирования вещества.
[0500] При операции 980 устройство 704 корректировки дозирования генерирует калибровочную информацию 964 для устройств дозирования вещества. Калибровочная информация 964 включает в себя информацию для управления устройствами дозирования вещества таким образом, чтобы объемы, дозированные устройствами дозирования вещества, были приближены к целевым объемам. Если устройства дозирования вещества включают в себя шаговые двигатели, калибровочная информация 964 включает в себя корректировку шаговых разрешений шаговых двигателей для корректировки объемов, дозируемых шаговыми двигателями.
[0501] При операции 982 устройство 704 корректировки дозирования корректирует рабочие параметры устройств дозирования вещества на основании калибровочной информации 964. Устройства дозирования вещества могут функционировать с возможностью дозирования одинаковых или разных объемов в зависимости от изменяемых рабочих параметров. В примере выше, в котором три случая дозирования считаются группой, после калибровки проводят новое определение объемов, дозированных в сосуд.
[0502] На ФИГ. 37–39 в качестве примера описано функционирование устройства 706 обнаружения реакционного сосуда.
[0503] На ФИГ. 37 представлена функциональная схема, иллюстрирующая пример способа 1000 функционирования устройства 706 обнаружения реакционного сосуда. В некоторых вариантах осуществления способ 1000 включает в себя операции 1002, 1004, 1006, 1008, 1010 и 1012.
[0504] По существу, во время инициализации или перезагрузки системы необходимо удалять сосуды внутри промывочного колеса. Устройство 706 обнаружения реакционных сосудов может использовать блок 132 захвата изображения сосуда для определения того, были ли удалены все или некоторые из сосудов в ходе этой инициализирующей последовательности. В некоторых вариантах осуществления промывочное колесо функционирует с возможностью дискретного перемещения по каждой позиции таким образом, чтобы местоположение каждого сосуда проверялось блоком захвата изображения. В каждом дискретном положении промывочного колеса устройство 706 обнаружения реакционного сосуда может выполнять обработку изображения, например, алгоритм проверки соответствия шаблону, с целью проверки наличия сосуда путем сравнения захваченного изображения с эталонным изображением (например, изображением промывочного колеса без сосуда). Устройство 706 обнаружения реакционного сосуда в соответствии с примером осуществления настоящего изобретения обеспечивает надежные результаты в отличие от других подходов, которые учитывают или используют объемы в сосудах. Поскольку устройство 706 обнаружения реакционного сосуда ищет близкое соответствие геометрической форме сосуда, значительное отклонение от эталонного изображения указывает на наличие сосуда, а небольшое отклонение указывает на отсутствие сосуда. Если определено наличие сосуда, система может удалить сосуд и повторно выполнить проверку, чтобы подтвердить, что сосуд был успешно удален. После того как будет определено, что в данном местоположении колеса сосуды отсутствуют, колесо может перейти к следующей позиции и повторить процесс.
[0505] В проиллюстрированном примере устройство 706 обнаружения реакционного сосуда главным образом описано применительно к промывочному колесу 720. Однако в других вариантах осуществления устройство 706 обнаружения реакционного сосуда используется с другими типами несущего устройства для контейнеров.
[0506] При операции 1002 устройство 706 обнаружения реакционного сосуда захватывает изображение прорези 1044 для сосуда (ФИГ. 39) (например, прорези 736) на промывочном колесе 720 с использованием блока 132 захвата изображения сосуда.
[0507] При операции 1004 устройство 706 обнаружения реакционного сосуда анализирует изображение для определения наличия или отсутствия сосуда 1042 (ФИГ. 39) (например, реакционного сосуда 738) на промывочном колесе 720. Пример операции 1004 более подробно описан со ссылкой на ФИГ. 38 и 39.
[0508] При операции 1006 устройство 706 обнаружения реакционного сосуда определяет, находится ли сосуд в прорези для сосуда. Если это так («ДА» при операции 1006), то способ 1000 переходит к операции 1008. В противном случае («НЕТ» при операции 1006) способ 1000 переходит к операции 1010.
[0509] При операции 1008 устройство 706 обнаружения реакционного сосуда удаляет сосуд из прорези для сосуда промывочного колеса 720. В других вариантах осуществления для удаления сосуда из промывочного колеса 720 используются другие устройства (такие как устройства перемещения или несущие устройства, как проиллюстрировано на ФИГ. 2) в приборе 100. В других вариантах осуществления сосуд удаляют из промывочного колеса 720 вручную.
[0510] При операции 1010 устройство 706 обнаружения реакционного сосуда определяет, были ли проанализированы все позиции промывочного колеса 720 в ходе предыдущих операций (например, операций 1002, 1004, 1006 и 1008). Если это так («ДА» при операции 1010), то способ 1000 переходит к следующей определенной стадии. В противном случае («НЕТ» при операции 1010) способ 1000 переходит к операции 1012.
[0511] При операции 1012 устройство 706 обнаружения реакционного сосуда перемещает промывочное колесо 720 в следующую позицию и повторяет операцию 1002 и последующие операции.
[0512] На ФИГ. 38 и 39 представлен пример операции 1004, изображенной на ФИГ. 37, в которой анализируется захваченное изображение для определения наличия сосуда на промывочном колесе. В частности, на ФИГ. 38 представлена функциональная схема, иллюстрирующая пример способа 1020 выполнения операции 1004, изображенной на ФИГ. 37. Способ 1020 также описан со ссылкой на ФИГ. 39, где проиллюстрирован пример анализа захваченного изображения 1040 прорези 1044 для сосуда на промывочном колесе.
[0513] При операции 1022 устройство 706 обнаружения реакционного сосуда обнаруживает область интереса 1046 на захваченном изображении 1040. В некоторых вариантах осуществления область интереса 1046 включает в себя по меньшей мере часть прорези 1044 для сосуда (например, прорези 736) на промывочном колесе 720. В некоторых вариантах осуществления область интереса 1046 включает в себя нижнюю часть сосуда или часть на изображении, которая соответствует местоположению нижней части сосуда. Один пример способа обнаружения области интереса может быть реализован программным обеспечением Cognex In–Sight Vision Software, доступным от компании Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0514] При операции 1024 устройство 706 обнаружения реакционного сосуда сравнивает область интереса 1046 с эталонным изображением 1048. В некоторых вариантах осуществления эталонное изображение 1048 включает в себя часть, соответствующую области интереса 1046. В других вариантах осуществления эталонное изображение 1048 само по себе соответствует области интереса 1046 на захваченном изображении 1040.
[0515] В некоторых вариантах осуществления эталонное изображение 1048 представляет собой изображение прорези 1044 для сосуда без сосуда 1042 в ней (ФИГ. 39). В других вариантах осуществления в качестве эталонного изображения 948 могут использоваться другие изображения. Например, эталонное изображение представляет собой изображение прорези для сосуда с сосудом в нем.
[0516] При операции 1026 устройство 706 обнаружения реакционного сосуда генерирует балльную оценку соответствия между захваченным изображением 1040 и эталонным изображением 1048. Балльная оценка соответствия представляет собой степень соответствия захваченного изображения 1040 эталонному изображению 1048. Балльная оценка соответствия используется в качестве показателя для определения отсечки по присутствию сосуда 1042 в прорези 1044 промывочного колеса 720.
[0517] При операции 1028 устройство 706 обнаружения реакционного сосуда определяет, соответствует ли балльная оценка соответствия пороговому значению. Если балльная оценка соответствия удовлетворяет пороговому значению («ДА» при операции 1028), считается, что сосуд отсутствует в прорези промывочного колеса, а способ 1020 переходит к операции 1030. В ином случае («НЕТ» при операции 1028) считается, что в прорези промывочного колеса присутствует сосуд, и способ 1020 переходит к операции 1032. Например, если балльная оценка соответствия ниже заданного порогового значения или значения отсечки, считается, что в прорези промывочного колеса присутствует сосуд, и способ 1020 переходит к операции 1032.
[0518] При операции 1030 устройство 706 обнаружения реакционного сосуда подтверждает отсутствие сосуда 1042 в прорези 1044 промывочного колеса 720.
[0519] При операции 1032 устройство 706 обнаружения реакционного сосуда подтверждает наличие сосуда 1042 в прорези 1044 промывочного колеса 720.
[0520] Как описано со ссылкой на ФИГ. 22–39, устройство 402 определения объема сосуда может быть модифицировано так, чтобы оно подходило для применения в различных областях. Например, устройство 402 определения объема сосудов может применяться для любого анализатора, который подготавливает и/или использует текучие вещества для обнаружения интересующего аналита, такого как анализатор для диагностики in vitro (IVD). В некоторых вариантах осуществления устройство 402 определения объема сосуда и соответствующие способы могут применяться для любых устройств или блоков, отличных от промывочного колеса. Некоторые варианты осуществления устройства 402 определения объема сосуда могут применяться для проверки общего объема реакционной смеси. В некоторых вариантах осуществления калибровочные кривые, используемые в устройстве 402 определения объема сосуда, строятся исходя из зависимости между расстояниями в пикселях и колориметрическими результатами определения объема, полученными с использованием спектрофотометра. В других вариантах осуществления калибровочные кривые, используемые в устройстве 402 определения объема сосуда, строятся исходя из зависимости между расстояниями в пикселях и результатами реакции с щелочной фосфатазой, полученными с использованием модуля подсчета фотонов. В других вариантах осуществления калибровочные кривые, используемые в устройстве 402 определения объема сосуда, строят с использованием реакционного сосуда JIG с линиями на высоте, соответствующими известному объему, на внешней стенке. Для определения остаточного объема (например, при объеме более 10 мкл) в устройстве 402 определения объема сосуда может применяться поиск линии или сопоставление со шкалой серого.
[0521] Устройство 402 определения объема сосуда в соответствии с примером осуществления настоящего изобретения может использоваться в других различных областях применения. В некоторых вариантах осуществления устройство 402 определения объема сосуда используется для определения смещения дозирующего наконечника. Например, блок 132 захвата изображения сосуда используется для определения того, смещен ли дозирующий наконечник относительно центра, когда дозирующий наконечник входит в поле зрения. В других вариантах осуществления устройство 402 определения объема сосуда используется для определения правильности позиционирования колеса. Например, блок 132 захвата изображения сосуда используется для определения того, имеет ли промывочное колесо наклон или неверное положение. В других вариантах осуществления устройство 402 определения объема сосуда используется для обнаружения любого аномального состояния, такого как разбрызгивание, пенообразование или плохое намагничивание. В других вариантах осуществления устройство 402 определения объема сосуда используется для определения целостности реакционных сосудов, например, обнаружения царапин, обесцвечивания и светопроницаемости. В других вариантах осуществления устройство 402 определения объема сосуда используется для определения правильности выравнивания наконечника.
[0522] Источник света, используемый в устройстве 402 определения объема сосуда, не обязательно должен находиться позади реакционного сосуда. Также возможны и другие местоположения устройства подсветки. Альтернативно источник света может быть встроен в блок камеры и выполнен с возможностью испускания света от блока камеры. Такой источник света, встроенный в блок камеры, можно использовать с экраном, расположенным позади реакционного сосуда, как проиллюстрировано в настоящем документе. В некоторых вариантах осуществления блок камеры, используемый в устройстве 402 определения объема сосуда, выполнен с возможностью отслеживания температуры сосуда и/или промывочного колеса с использованием ИК–спектра.
[0523] Как описано выше, устройство 706 обнаружения реакционного сосуда из устройства 402 определения объема сосуда может применяться к любым несущим устройствам для контейнеров, отличным от промывочного колеса. Как описано выше, устройство 704 корректировки дозирования в устройстве 402 определения объема сосуда может функционировать с возможностью измерения уровней объема субстрата и использования измеренных уровней для корректировки значений RLU результата исследования, точной настройки калибровки и повышения точности.
[0524] Прибор 100 в соответствии с примером осуществления настоящего изобретения использует различные программные решения для реализации операций по оценке изображения, описанных в настоящем документе, таких как сопоставление с шаблоном. В некоторых вариантах осуществления такие программные решения разрабатываются с использованием готовых программных решений. Одним из примеров программных решений является программное обеспечение In–Sight Explorer Software (также называемое программным обеспечением In–Sight Vision Software), доступное от компании Cognex Corporation, г. Натик, Массачусетс, США.
[0525] На ФИГ. 40 и на последующих фигурах показан пример системы 122 оценки дозирующих наконечников.
[0526] На ФИГ. 40 представлена блок–схема примера системы 122 оценки дозирующих наконечников, изображенной на ФИГ. 1. В некоторых вариантах осуществления система 122 оценки дозирующих наконечников включает в себя устройство 1100 оценки целостности в дозирующем наконечнике.
[0527] Устройство 1100 оценки целостности в дозирующем наконечнике предназначено для оценки качества текучего вещества 118, аспирированного в дозирующий наконечник 112, и смещения дозирующего наконечника 112. Как описано в настоящем документе, дозирующий наконечник 112 может относиться к разным типам и использоваться для разных процессов. Одним примером дозирующего наконечника 112 является пипетирующий наконечник, который может использоваться с устройством 152 пипетирования образцов. Устройство 1100 оценки целостности в дозирующем наконечнике может использовать блок 130 захвата изображения дозирующего наконечника. Пример устройства 1100 оценки целостности в дозирующем наконечнике проиллюстрирован и описан более подробно со ссылкой на ФИГ. 41.
[0528] На ФИГ. 41 представлена блок–схема примера устройства 1100 оценки целостности в дозирующем наконечнике, изображенного на ФИГ. 40. В некоторых вариантах осуществления устройство 1100 оценки целостности в дозирующем наконечнике включает в себя устройство 1112 определения качества образца и устройство 1114 определения выравнивания наконечника.
[0529] В некоторых вариантах осуществления устройство 1100 оценки целостности в дозирующем наконечнике реализовано с системой 510 аспирации образцов, изображенной на ФИГ. 10. В других вариантах осуществления устройство 1100 оценки целостности в дозирующем наконечнике может использоваться в других типах систем, функционирующих с возможностью аспирации или дозирования текучего вещества в контейнере.
[0530] Устройство 1112 определения качества образца предназначено для определения качества образца, аспирированного в пипетирующий наконечник устройства 152 пипетирования образца. Пример конструкции и функционирования устройства 1112 определения качества образца описан со ссылкой на ФИГ. 42–55.
[0531] В дополнение к определению качества образца в дозирующем наконечнике устройство 1112 определения качества образца также можно использовать для определения качества текучего вещества 118, содержащегося внутри сосуда 114. Как описано в настоящем документе, сосуд 114 может относиться к различным типам и использоваться для разных процессов. К примерам сосудов 114 относятся реакционный сосуд, сосуд с образцом и сосуд для разбавления, которые используются в ходе процесса в приборе 100. В некоторых вариантах осуществления устройство 1112 определения качества образца может использовать блок 132 захвата изображения сосуда.
[0532] Устройство 1114 определения выравнивания наконечника функционирует с возможностью определения допуска и смещения дозирующего наконечника 112 относительно модуля 512 пипетирования образцов и/или блока 130 захвата изображения дозирующего наконечника. Приемлемый допуск дозирующего наконечника 112 и/или смещение дозирующего наконечника 112 могут снижать точность при обнаружении аспирированного объема образца в дозирующем наконечнике 112, выполняемого, например, устройством 400 определения объема дозирующего наконечника, описанным в настоящем документе. Устройство 1114 определения выравнивания наконечника дополнительно функционирует с возможностью регулирования или коррекции определенного объема жидкости, аспирированной в дозирующий наконечник 112, на основании определения допуска и смещения. Пример конструкции и функционирования устройства 1114 определения выравнивания наконечника описан со ссылкой на ФИГ. 56–68.
[0533] На ФИГ. 42–55 представлен пример устройства 1112 определения качества образца.
[0534] На ФИГ. 42 проиллюстрирован пример устройства 1112 определения качества образца. В некоторых вариантах осуществления устройство 1112 определения качества образца включает в себя устройство 1120 захвата изображения, устройство 1122 оценки изображения, устройство 1124 генерации классификационных данных и классифицирующее устройство 1126. Также показаны аспирированный образец 1130, изображение 1132, один или более цветовых параметров 1134, классификационные данные 1136 и результат 1138 классификации образца.
[0535] Устройство 1112 определения качества образца функционирует с возможностью оценки качества образца, аспирированного дозирующим наконечником, и определения того, имеет ли образец достаточное качество для последующего анализа. Если определено, что качество образца нарушено, прибор может проинформировать пользователя о качестве образца и/или остановить исследование.
[0536] В некоторых вариантах осуществления образец (например, образец 324 на ФИГ. 4), предоставленный в пробирке для образца, содержит различные мешающие вещества, или мешающие компоненты, которые могут нарушать целостность образца и влиять на результаты лабораторных исследований. Такой образец, содержащий мешающие вещества в количестве более допустимого уровня, может приводить к ошибочным, но кажущимся верными результатам, обнаружить которые непросто. Для систем химического и иммунологического анализа к примерам мешающих компонентов относятся гемоглобин, билирубин (также называемый в настоящем документе желтухой, которая представляет собой медицинское состояние, вызванное билирубином) и липиды (также называемые в настоящем документе липемией, которая представляет собой медицинское состояние, вызванное липидами). В зависимости от анализа концентрации гемоглобина, состояния желтухи и липемии следует ограничить заданными уровнями для обеспечения отсутствия помех, приводящих к искаженному результату.
[0537] Для оценки качества образца используют различные способы. Некоторые примеры таких способов включают в себя химические анализаторы с использованием спектрофотометров. Использование такого спектрофотометра для определения качества образца является независимым от химического анализа образца и, следовательно, может потребовать дополнительного образца для определения целостности в зависимости от производителя. Поскольку спектрофотометр использует для измерения конкретные длины волн, для системы требуется либо светодиодный, либо коллимированный источник света, и в нем используется сложная математическая обработка из-за спектрального перекрытия мешающих компонентов с конечными продуктами некоторых анализов. Кроме того, образцы с сильной липемией зачастую демонстрируют объемное смещение, что может повлиять на объем образца при проведении исследования. Таким образом, способы оценки качества образца требовали проведения отдельного исследования для этого и приводили к дополнительным затратам. В результате этого основное исследование образца задерживается, поскольку основное исследование образца может выполняться только после проверки качества. Альтернативно, если основное исследование образца и исследование качества образца выполняются одновременно, некачественный образец можно лишь пометить флагом во время или после основного исследования образца. В этом случае требуется повторное взятие образца, что также приводит к задержке получения результатов исследования.
[0538] Напротив, устройство 1112 определения целостности образца встроено в прибор 100 и использует различные компоненты прибора 100, которые выполнены с возможностью анализа образцов. Таким образом, один прибор может как оценить качество образца, так и провести анализ образца, не вызывая задержки и дополнительных затрат.
[0539] Как описано выше, в некоторых вариантах осуществления устройство 1112 определения целостности образца используется с системой 510 аспирации образцов, изображенной на ФИГ. 10. В других вариантах осуществления устройство 1112 определения целостности образца может использоваться в системах других типов, функционирующих с возможностью аспирации текучего вещества в контейнер.
[0540] В проиллюстрированном примере устройство 1112 определения целостности образца описано главным образом в контексте иммуноанализатора, как проиллюстрировано на ФИГ. 2 и 4. Например, устройство 1112 определения целостности образца функционирует с возможностью определения концентрации мешающих компонентов, таких как гемоглобин, состояние желтухи, липемии, в образце, аспирированном в дозирующий наконечник. Однако в других вариантах осуществления устройство 1112 определения целостности образца используется для оценки качества образца в приборах других типов.
[0541] Как правило, устройство 1112 определения целостности образца получает изображение прозрачного конического контейнера с текучей средой внутри. Затем устройство 1112 определения целостности образца получает информацию о соответствующих пикселях в пределах интересующей области на изображении. Информация о пикселях используется для классификации текучей среды. Устройство 1112 определения целостности образца включает в себя модель классификации, в которой для группирования текучих сред по категориям используются классификаторы. Если цвет текучей среды, аспирированной в контейнер, не соответствует заданным спецификациям, то аспирация или исследование помечаются флагом. В некоторых вариантах осуществления оператор прибора получает информацию об аспирации текучей среды, если определяется, что целостность текучей среды выходит за пределы спецификаций для данной текучей среды.
[0542] Как также показано на ФИГ. 42, устройство 1120 захвата изображения функционирует с возможностью захвата изображения 1132 образца 1130, аспирированного в дозирующий наконечник 1180 (ФИГ. 45). В некоторых вариантах осуществления образец 1130 представляет собой пример образца 540, а дозирующий наконечник 1180 представляет собой пример дозирующего наконечника 112, показанного на ФИГ. 10. В некоторых вариантах осуществления устройство 1120 захвата изображения функционирует с возможностью захвата более одного изображения образца 1130, аспирированного дозирующим наконечником 1180, в различные временные интервалы. Например, устройство 1120 захвата изображения функционирует с возможностью последовательного захвата двух изображений образца 1130, аспирированного дозирующим наконечником 1180, с интервалом приблизительно 30 (тридцать) миллисекунд друг от друга или с любым другим временным интервалом. В некоторых вариантах осуществления устройство 1120 захвата изображения использует блок 130 захвата изображения дозирующего наконечника, который включает в себя блок 550 камеры и источник 552 света. В некоторых вариантах осуществления источник 552 света устройства 1120 захвата изображения создает белую подсветку. В других вариантах осуществления источник 552 света обеспечивает одну или более цветных подсветок, которые могут быть либо фиксированными, либо переменными во время захвата изображения. В некоторых вариантах осуществления источник 552 света может генерировать подсветку с различными значениями времени экспозиции. Например, источник 552 света может генерировать подсветку со временем экспозиции приблизительно 6 (шесть) миллисекунд, а устройство 1120 захвата изображения функционирует с возможностью захвата первого изображения сразу после экспозиции, составляющей приблизительно 6 (шесть) миллисекунд, и захвата второго изображения через приблизительно 30 (тридцать) секунд. В одном варианте осуществления первое изображение получают через приблизительно 0,2 секунды после дозирования реагента в контейнер. В одном варианте осуществления второе изображение получают через приблизительно 6,5 секунды перемешивания. В дополнительном варианте осуществления первое изображение получают через приблизительно 0,2 секунды после дозирования реагента в контейнер, и причем второе изображение получают через приблизительно 6,5 секунды перемешивания. Варьирование времени экспозиции может улучшать оценку захваченного изображения для цветовых параметров. Например, если образец имеет высокую концентрацию, то более длительное время экспозиции, вероятно, приведет к более яркому изображению, так что устройство 1122 оценки изображения сможет эффективно оценивать разные цветовые параметры.
[0543] Устройство 1122 оценки изображения функционирует с возможностью обработки и оценки захваченного изображения 1132 и генерации одного или более цветовых параметров 1134. Цветовые параметры 1134 используются для определения концентраций мешающих компонентов, содержащихся в образце 1130. Пример устройства 1122 оценки изображения проиллюстрирован и описан более подробно со ссылкой на ФИГ. 44–48.
[0544] Устройство 1124 генерации классификационных данных функционирует с возможностью генерации классификационных данных 1136. Как описано ниже, классификационные данные 1136 включают в себя перечень классификационных меток для разных количеств мешающих компонентов, которые используются классифицирующим устройством 1126 для генерации результата 1138 классификации образца. Пример устройства 1124 генерации классификационных данных проиллюстрирован и описан более подробно со ссылкой на ФИГ. 49–53.
[0545] Классифицирующее устройство 1126 функционирует с возможностью генерации результата 1138 классификации образца на основании цветовых параметров 1134 и классификационных данных 1136. Результат 1138 классификации образца включает в себя информацию, указывающую на качество образца 1130. Например, результат 1138 классификации образца включает в себя информацию, отражающую уровни концентрации мешающих компонентов, таких как гемоглобин, состояния желтухи и липемии, в аспирированном образце 1130 и указывает на приемлемость уровней концентрации мешающих компонентов по отдельности или в комбинации. Таким образом, результат 1138 классификации образца используется для определения того, имеет ли образец 1130 достаточное качество для лабораторного анализа в приборе 100. Пример классифицирующего устройства 1126 проиллюстрирован и описан более подробно со ссылкой на ФИГ. 54–55.
[0546] На ФИГ. 43 представлена функциональная схема, иллюстрирующая пример способа 1150 функционирования устройства 1112 определения целостности образца. В некоторых вариантах осуществления способ 600 выполняется системой 510 аспирации образцов (ФИГ. 10) и устройством 1112 определения целостности образца.
[0547] Как правило, способ 1150 выполняет анализ качества образца в дозирующем наконечнике с точки зрения концентрации мешающих компонентов, таких как гемоглобин, состояния желтухи (билирубин) и липемии, и отмечает результат исследования флагом, если измеренное качество классифицируется как выходящее за пределы диапазона приемлемости.
[0548] При операции 1152 система 510 аспирации образцов функционирует с возможностью аспирации текучего вещества, такого как образец 1130, в дозирующий наконечник 1180 (ФИГ. 45) (который является примером дозирующего наконечника 112, показанного на ФИГ. 10) в соответствии с программой.
[0549] При операции 1154 система 510 аспирации образца транспортирует дозирующий наконечник 1180, содержащий аспирированный образец 1130, в устройство 1120 захвата изображения (которое включает в себя блок 130 захвата изображения дозирующего наконечника). В некоторых вариантах осуществления блок 130 захвата изображения дозирующего наконечника в устройстве 1120 захвата изображения размещен с возможностью захвата изображения дозирующего наконечника 1180 после аспирации без транспортировки.
[0550] При операции 1156 блок 130 захвата изображения дозирующего наконечника захватывает изображение 1132 дозирующего наконечника 1180. В некоторых вариантах осуществления изображение 1132 дозирующего наконечника 1180 представляет собой цифровое изображение с заданным разрешением. В некоторых вариантах осуществления блок 132 захвата изображения дозирующего наконечника может захватывать более одного изображения дозирующего наконечника 1180 через различные временные интервалы. Например, блок 132 захвата изображения дозирующего наконечника может захватывать два изображения дозирующего наконечника 1180 с интервалом приблизительно 30 (тридцать) миллисекунд друг от друга или с любым другим временным интервалом. При операции 1158 устройство 1112 определения целостности образца анализирует изображение 1132 для определения содержания мешающих компонентов в образце 1130 внутри дозирующего наконечника 1180. Пример операции 1158 более подробно описан со ссылкой на ФИГ. 44–55.
[0551] При операции 1160 устройство 1112 определения целостности образца определяет, находится ли уровень мешающих компонентов в пределах диапазона допуска. Если определенный уровень выходит за пределы диапазона допуска, аспирация образца 1130 в дозирующий наконечник 112 считается неверной. Диапазон допуска может изменяться в зависимости от типа образца и/или типов мешающих компонентов в нем. В некоторых вариантах осуществления определение того, попадает ли определенный уровень мешающих компонентов в диапазон допуска, может быть выполнено с помощью классифицирующих идентификаторов или классификаторов, как описано ниже.
[0552] Если определяется, что уровень мешающих компонентов находится в пределах диапазона допуска («ДА» при операции 1160), способ 1150 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 1160) способ 1150 переходит к операции 1162.
[0553] При операции 1162 устройство 1112 определения целостности образца отмечает аспирацию флагом, указывающим на то, что аспирированный образец 1130 в дозирующем наконечнике 1180 не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовался аспирированный образец, может быть помечен флагом для указания на то, что результат исследования может быть неправильным. Альтернативно устройство 1112 определения целостности образца функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за нарушения качества образца.
[0554] На ФИГ. 44–55 представлен пример операции 1158, изображенной на ФИГ. 43, в которой анализируется захваченное изображение 1132 и определяется качество образца, аспирированного в дозирующий наконечник. В некоторых вариантах осуществления операция 1158 выполняется устройством 1122 оценки изображения, устройством 1124 генерации классификационных данных и классифицирующим устройством 1126 в устройстве 1112 определения целостности образца.
[0555] На ФИГ. 44 представлена функциональная схема, иллюстрирующая пример способа 1170 функционирования устройства 1122 оценки изображения, изображенного на ФИГ. 42. В некоторых вариантах осуществления способ 1170 включает в себя операции 1172, 1174 и 1176. Способ 1170 описан также со ссылкой на ФИГ. 45, где проиллюстрирован пример анализа захваченного изображения 1132.
[0556] При операции 1172 устройство 1122 оценки изображения находит дозирующий наконечник 1180 на изображении 1132. Для определения местоположения дозирующего наконечника 1180 на изображении 1132 можно использовать различные способы обработки изображения. В некоторых вариантах осуществления дозирующий наконечник 1180 обнаруживается с помощью функции сопоставления с шаблоном, которая выполняет поиск шаблона, представляющего дозирующий наконечник, на основании предварительного обучения по эталонному изображению. Такие способы обработки изображений могут быть реализованы на различных языках программирования, таких как Python (например, соответствующая функция поиска контура). Один пример способа таких способов обработки изображений может быть реализован программным обеспечением Cognex In Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0557] При операции 1174 устройство 1122 оценки изображения обнаруживает заданную область интереса 1182. Область интереса 1182 представляет собой область изображения 1132, которую оценивают с целью определения качества образца 1130 в дозирующем наконечнике 1180. Область интереса 1182 задается как область, которая многократно обнаруживается как содержащая образцы 1130 на разных изображениях 1132. Для обнаружения области интереса 1182 можно использовать различные способы. Один из примеров таких способов описан со ссылкой на ФИГ. 46. В некоторых вариантах осуществления может присутствовать более одной заданной области интереса, и, таким образом, устройство 1122 оценки изображения обнаруживает более одной заданной области интереса. Например, могут присутствовать три заданные области интереса: первая область интереса выше области интереса 1182, вторая область интереса, такая как область интереса 1182, и третья область интереса ниже области интереса 1182.
[0558] При операции 1176 устройство 1122 оценки изображения получает цветовые параметры 1134 (ФИГ. 42) для захваченного изображения 1132. В некоторых вариантах осуществления область интереса 1182 на изображении 1132 анализируют для генерации цветовых параметров 1134. Один пример получения цветовых параметров описан со ссылкой на ФИГ. 47 и 48.
[0559] На ФИГ. 46 представлена функциональная схема, иллюстрирующая пример способа 1190 обнаружения области интереса 1182 на изображении 1132. В некоторых вариантах осуществления способ 1190 включает в себя операции 1192 и 1194. Способ 1190 описан также со ссылкой на ФИГ. 45.
[0560] Как правило, после определения местоположения дозирующего наконечника 1180 устройство 1122 оценки изображения использует набор факторов смещения для определения области интереса 1182. В некоторых вариантах осуществления область интереса 1182 оптимизируют таким образом, чтобы она включала в себя часть изображения дозирующего наконечника, которая находится приблизительно по центру по отношению к вертикальной и горизонтальной осям образца 1130 в дозирующем наконечнике 1180, так что область 1182 интереса по существу находится в центре аспирированного образца 1130. В других вариантах осуществления для области интереса 1182 возможны и другие местоположения. В других вариантах осуществления может быть предусмотрено более одной области интереса, как описано выше.
[0561] При операции 1192 устройство 1122 оценки изображения находит опорную линию, связанную с дозирующим наконечником 1180. В некоторых вариантах осуществления опорная линия представляет собой продольный край 1184 дозирующего наконечника 1180 на изображении 1132. В качестве опорной линии могут использоваться другие линии дозирующего наконечника 1180.
[0562] При операции 1194 устройство 1122 оценки изображения находит область, которая расположена на расстоянии от опорной линии 1184 с заданным смещением 1186. В некоторых вариантах осуществления заданное смещение 1186 определяет горизонтальное положение области интереса 1182, в то время как вертикальное положение области интереса 1182 устанавливается как заданная высота 1188 от нижней части изображения 1132. В некоторых вариантах осуществления вертикальное положение области интереса остается по существу идентичным для разных изображений, поскольку блок захвата изображения расположен каждый раз на высоте образца относительно дозирующих наконечников.
[0563] Один из примеров вышеуказанных способов обработки изображений может быть реализован программным обеспечением Cognex In Sight Vision Software, поставляемым компанией Cognex Corporation (г. Натик, штат Массачусетс, США), которое предоставляет различные инструменты, такие как обнаружение края («Edge»), сопоставление с шаблоном («Pattern Match») и анализ гистограммы («Histogram»).
[0564] На ФИГ. 47 представлена функциональная схема примера способа 1210 получения цветовых параметров для изображения 1132. Способ 1210 описан также со ссылкой на ФИГ. 48, где проиллюстрирован пример гистограммы 1220 для изображения 1132. В некоторых вариантах осуществления способ 1210 включает в себя операции 1212 и 1214.
[0565] При операции 1212 устройство 1122 оценки изображения генерирует гистограмму 1220 для изображения 1132. В некоторых вариантах осуществления гистограмма 1220 генерируется на основании данных для области интереса 1182 на изображении 1132. В некоторых вариантах осуществления существует несколько областей интереса и, следовательно, устройство 1122 оценки изображения генерирует гистограмму 1120 для каждой области интереса на изображении 1132. Например, при наличии на изображении 1132 трех областей интереса устройство 1122 оценки изображения генерирует три соответствующие гистограммы.
[0566] Как проиллюстрировано на ФИГ. 48, гистограмма 1220 представляет собой распределение разных цветов на изображении 1132 (например, в его области интереса 1182). В некоторых вариантах осуществления на гистограмме 1220 показано количество цветных пикселей в каждом из фиксированного списка цветовых диапазонов (в настоящем документе также называемых корзинами). Гистограмму 1220 можно построить для любого типа цветового пространства. В проиллюстрированном примере используется цветовая модель RGB. В других вариантах осуществления может использоваться цветовая модель CMYK и любые другие цветовые модели.
[0567] Гистограмму 1220 можно получить сначала путем распределения цветов (т.е. красного, зеленого и синего в модели RGB) на изображении 1132 (например, в его области интереса 1182) по нескольким корзинам и подсчета числа пикселей в каждой корзине. Например, если изображение 1132 представляет собой 8–битное изображение, то значения от нуля до 255 для каждого цвета группируют по нескольким корзинам таким образом, что каждая корзина включает в себя диапазон из десяти значений. В качестве примера, первая корзина включает в себя значения, равные и превышающие нуль и составляющие меньше 10, вторая корзина включает в себя значения, равные и превышающие 10 и составляющие меньше 20, третья корзина включает в себя значения, равные и превышающие 20 и составляющие меньше 30, и т. д. Как проиллюстрировано на ФИГ. 48, на гистограмме 1220 представлены первый цветовой канал 1222, второй цветовой канал 1224 и третий цветовой канал 1226, которые соответственно представляют красный, зеленый и синий компоненты в модели RGB. В других вариантах осуществления можно использовать другие цветовые компоненты в модели RGB, цветовой модели CMYK или любой другой цветовой модели. В других вариантах осуществления изображение может иметь другое битовое разрешение, например, 15–битный цвет, 16–битный цвет, 24–битный цвет, 30–битный цвет, 36–битный цвет, 48–битный цвет или любое другое битовое разрешение.
[0568] При операции 1214 устройство 1122 оценки изображения получает множество цветовых параметров 1134 из гистограммы 1220. В некоторых вариантах осуществления устройство 1122 оценки изображения получает шесть цветовых параметров. Например, первый цветовой параметр 1232 представляет собой среднее значение первого цветового канала 1222, второй цветовой параметр 1234 представляет собой среднее значение второго цветового канала 1224, а третий цветовой параметр 1236 представляет собой среднее значение третьего цветового канала 1226. Дополнительно четвертый цветовой параметр 1242 представляет собой риманову сумму первого цветового канала 1222, пятый цветовой параметр 1244 представляет собой риманову сумму второго цветового канала 1224, а шестой цветовой параметр 1246 представляет собой риманову сумму третьего цветового канала 1226. Римановы суммы первого, второго и третьего цветовых каналов 1222, 1224 и 1226 представляют собой площади под кривыми для первого, второго и третьего цветовых каналов 1222, 1224 и 1226 соответственно.
[0569] В других вариантах осуществления из гистограммы 1220 получают другие цветовые параметры. Например, цветовые параметры могут включать в себя максимум первого цветового канала 1222, максимум второго цветового канала 1224, максимум третьего цветового канала 1226, минимум первого цветового канала 1222, минимум второго цветового канала 1224, минимум третьего цветового канала 1226, моду первого цветового канала 1222, моду второго цветового канала 1224, моду третьего цветового канала 1226, начальное значение гистограммы первого цветового канала 1222, начальное значение гистограммы второго цветового канала 1224, начальное значение гистограммы третьего цветового канала 1226, конечное значение гистограммы первого цветового канала 1222, конечное значение гистограммы второго цветового канала 1224, конечное значение гистограммы третьего цветового канала 1226, процент начальных значений гистограммы первого цветового канала 1222, процент начальных значений гистограммы второго цветового канала 1224, процент начальных значений гистограммы третьего цветового канала 1226, процент конечных значений гистограммы первого цветового канала 1222, процент конечных значений гистограммы второго цветового канала 1224 и процент конечных значений гистограммы третьего цветового канала 1226. Начальное значение гистограммы указывает значение гистограммы с наименьшим значением серого. Например, начальное значение гистограммы первого цветового канала 1222 указывает наименьшее значение серого для первого цветового канала 1226 на гистограмме. Конечное значение гистограммы указывает значение гистограммы с наибольшим значением серого. Например, конечное значение гистограммы первого цветового канала 1222 указывает наибольшее значение серого для первого цветового канала 1226 на гистограмме. Процент начальных значений гистограммы указывает процентную долю всех пикселей на гистограмме в указанном диапазоне значений серого, которые имеют самые низкие значения серого. Например, процент начальных значений гистограммы первого цветового канала 1222 указывает процентную долю от общего числа пикселей первого цветового канала 1222 на гистограмме, которая находится в диапазоне самых низких значений серого для первого цветового канала 1222. Процент конечных значений гистограммы указывает процентную долю всех пикселей на гистограмме в указанном диапазоне значений серого, которые имеют самые высокие значения серого. Например, процент конечных значений гистограммы первого цветового канала 1222 указывает процентную долю от общего числа пикселей первого цветового канала 1222 на гистограмме, которая находится в диапазоне самых высоких значений серого для первого цветового канала 1222.
[0570] В других вариантах осуществления цветовые параметры включают в себя средние цветовых каналов (например, первого, второго и третьего цветовых каналов), пики цветовых каналов (например, первого, второго и третьего цветовых каналов) и/или стандартные отклонения цветовых каналов (например, первого, второго и третьего цветовых каналов). В других вариантах осуществления используются другие типы цветовых параметров.
[0571] На ФИГ. 49 представлена функциональная схема примера способа 1270 функционирования устройства 1124 генерации классификационных данных, изображенного на ФИГ. 42. Способ 1270 описан со ссылкой на ФИГ. 50 и 51. На ФИГ. 50 представлен пример таблицы 1278, на которой проиллюстрировано, что значения мешающих компонентов преобразуются в классификационные метки, а на ФИГ. 51 представлен пример набора классификационных идентификаторов 1310 образцов, которые могут служить выходными данными классифицирующего устройства 1126, изображенного на ФИГ. 42.
[0572] В некоторых вариантах осуществления, как описано ниже, разные уровни качества образца классифицируются на множество целевых переменных, которые в настоящем документе также называются классификационными идентификаторами образцов. В частности, классифицирующее устройство 1126 определяет качество образца в виде одного из классификационных идентификаторов образцов. Устройство 1124 генерации классификационных данных функционирует с возможностью генерации классификационных идентификаторов образцов для конкретного мешающего компонента или конкретного набора мешающих компонентов. В некоторых вариантах осуществления классификационные идентификаторы образцов конструируют сначала путем преобразования значений для мешающих компонентов для конкретного образца в набор меток на основании значений концентраций индивидуальных мешающих компонентов. Затем набор меток для мешающих компонентов комбинируют в единый набор меток (т.е. классификационных идентификаторов образцов), который обеспечивает классификацию по диапазонам всех мешающих компонентов в образце.
[0573] Как также показано на ФИГ. 49, при операции 1272 устройство 1124 генерации классификационных данных определяет значения концентрации каждого мешающего вещества. В качестве примера, как проиллюстрировано на ФИГ. 50, оценивают три мешающих компонента, которые представляют собой первый мешающий компонент 1280, второй мешающий компонент 1282 и третий мешающий компонент 1284, для образца 1130, аспирированного в дозирующий наконечник. Определяют значения концентраций 1290, 1292 и 1294 мешающих компонентов 1280, 1282 и 1284 соответственно. В некоторых вариантах осуществления значения концентрации определяются как одно или более дискретных значений концентрации. В других вариантах осуществления значения концентрации определяются как диапазон значений концентрации.
[0574] Например, определены три значения концентрации 1290 (например, значение (–я) 1–1, значение (–я) 1–2 и значение (–я) 1–3) для первого мешающего вещества 1280, три значения концентрации 1292 (например, значение (–я) 2–1, значение (–я) 2–2 и значение (–я) 2–3) для второго мешающего вещества 1282 и три значения концентрации 1294 (например, значение (–я) 3–1, значение (–я) 3–2 и значение (–я) 3–3) для третьего мешающего вещества 1284. В других вариантах осуществления для тех же или других мешающих компонентов определены другие количества значений концентрации.
[0575] При операции 1274 устройство 1124 генерации классификационных данных присваивает классификационные метки 1300, 1302 и 1304 значениям 1290, 1292 и 1294 концентрации. В этом же примере значениям 1290 концентраций для первого мешающего вещества 1280 присвоены три классификационные метки 1300, такие как НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ. Значениям 1292 концентрации второго мешающего вещества 1282 присваивают две классификационные метки 1302, такие как ОТСУТСТВУЕТ и ПРИСУТСТВУЕТ. Значениям 1294 концентрации третьего мешающего вещества 1284 присваивают три классификационные метки 1304, такие как НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ. Также возможны и другие варианты осуществления классификационных меток. Например, в других вариантах осуществления значениям 1292 концентрации второго мешающего вещества 1282 можно присвоить три классификационные метки, такие как НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ, аналогично трем классификационным меткам 1300 и 1304. В других вариантах осуществления значениям 1290 и 1294 концентрации можно присвоить такие классификационные метки, как ОТСУТСТВУЕТ и ПРИСУТСТВУЕТ, аналогично двум классификационным меткам 1302.
[0576] При операции 1276 устройство 1124 генерации классификационных данных генерирует список классификационных идентификаторов 1310 образца на основании разных комбинаций значений концентраций мешающих компонентов. Классификационные идентификаторы 1310 образца используются для общего представления уровня или концентрации комбинации всех мешающих компонентов, представляющих интерес. Как описано ниже, классификационные идентификаторы 1310 образца служат в качестве целевых переменных для классифицирующего устройства 1126 или в качестве выходных данных классифицирующего устройства 1126.
[0577] Как проиллюстрировано на ФИГ. 51, список классификационных идентификаторов 1310 образца включает в себя все из возможных комбинаций классификационных меток 1300, 1302 и 1304. Пример обозначения классификационных идентификаторов 1310 образца представляет собой комбинацию классификационной метки 1300 для первого мешающего вещества 1280, классификационной метки 1302 для второго мешающего вещества 1282 и классификационной метки 1304 для третьего мешающего вещества 1284 по порядку. В проиллюстрированном примере, поскольку существуют три классификационные метки (например, НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ) для первого мешающего вещества 1280, две классификационные метки (например, ОТСУТСТВУЕТ и ПРИСУТСТВУЕТ) для второго мешающего вещества 1282 и три классификационные метки (например, НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ) для третьего мешающего вещества 1284, возможны 18 ( классификационных идентификаторов 1310 образца. Классификационные идентификаторы образца в настоящем документе также называются классификаторами образцов. Также возможны другие примеры классификационных идентификаторов. Например, второй мешающий компонент 1282 может иметь три классификационные метки (например, НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ) вместо двух классификационных меток (например, ОТСУТСТВУЕТ и ПРИСУТСТВУЕТ).
классификационных идентификаторов 1310 образца. Классификационные идентификаторы образца в настоящем документе также называются классификаторами образцов. Также возможны другие примеры классификационных идентификаторов. Например, второй мешающий компонент 1282 может иметь три классификационные метки (например, НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ) вместо двух классификационных меток (например, ОТСУТСТВУЕТ и ПРИСУТСТВУЕТ).
[0578] На ФИГ. 50 проиллюстрирован пример таблицы 1320 цветовых параметров для смеси из трех мешающих компонентов, причем каждый мешающий компонент имеет пять значений. В проиллюстрированном примере первый мешающий компонент 1280 представляет собой гемоглобин, второй мешающий компонент 1282 представляет собой состояние желтухи (билирубин), а третий мешающий компонент 1284 представляет собой состояние липемии (липид), причем прибор 100 представляет собой иммунологический анализатор. В качестве примера, первый мешающий компонент 1280 делят на три сегмента из пяти значений, таких как 0 мг/дл для значения (–й) 1–1 с классификационной меткой 1300 НУЛЕВАЯ, 250 и 500 мг/дл для значения (–й) 1–2 с классификационной меткой 1300 СРЕДНЯЯ и 750 и 1000 мг/дл для значения (–й) 1–3 с классификационной меткой 1300 ВЫСОКАЯ. Второй мешающий компонент 1282 делят на три сегмента из пяти значений, таких как 0 мг/дл для значения (–й) 2–1 с классификационной меткой 1302 ОТСУТСТВУЕТ, 10 и 20 мг/дл для значения (–й) 2–2 с классификационной меткой 1302 ПРИСУТСТВУЕТ и 30 и 40 мг/дл для значений (–й) 2–3 с классификационной меткой 1302 ПРИСУТСТВУЕТ. В других вариантах осуществления второй мешающий компонент 1282 можно разделить на три сегмента из пяти значений, таких как 0 мг/дл для значения (–й) 2–1 с классификационной меткой 1302 НУЛЕВАЯ, 10 и 20 мг/дл для значения (–й) 2–2 с классификационной меткой 1302 СРЕДНЯЯ и 30 и 40 мг/дл для значений (–й) 2–3 с классификационной меткой 1302 ВЫСОКАЯ. Третий мешающий компонент 1284 делят на три сегмента с пятью значениями, такими как 0 мг/дл для значения (–й) 3–1 с классификационной меткой 1304 НУЛЕВАЯ, 125 и 250 мг/дл для значения (–й) 3–2 с классификационной меткой 1304 СРЕДНЯЯ и 375 и 500 мг/дл для значения (–й) 3–3 с классификационной меткой 1304 ВЫСОКАЯ.
[0579] На ФИГ. 53 показан пример набора классификаторов 1310 образцов, которые, как предполагается, выводят из комбинаций первого, второго и третьего мешающих компонентов, как показано на ФИГ. 52. Классификаторы 1310 на ФИГ. 53 иллюстрируют лишь некоторые из возможных выходных сигналов на основании первого, второго и третьего мешающих компонентов, показанных на ФИГ. 52. Обозначение классификаторов 1310 образца создается так, как описано со ссылкой на ФИГ. 51. Например, если в образце присутствует липид в концентрации 0 мг/дл («НУЛЕВАЯ» в таблице 1320), образец содержит 10 мг/дл билирубина («ПРИСУТСТВУЕТ» в таблице 1320) и образец содержит 375 мг/дл гемоглобина («ВЫСОКАЯ» в таблице 1320), то классификатор 1310 образца формулируется как «НулеваяПрисутствуетВысокая». Также возможны другие примеры классификаторов 1310 образца. Например, если в образце присутствует липид 0 мг/дл (классификационная метка «НУЛЕВАЯ»), образец содержит билирубин 10 мг/дл, причем вместо «ПРИСУТСТВУЕТ» используется классификационная метка «СРЕДНЯЯ», и образец содержит 375 мг/дл гемоглобина (классификационная метка «ВЫСОКАЯ»), то классификатор 1320 образца будет иметь вид «НулеваяСредняяВысокая». В качестве еще одного примера, если в образце присутствует липид 0 мг/дл (классификационная метка «НУЛЕВАЯ»), образец содержит 0 мг/дл билирубина, причем вместо «ОТСУТСТВУЕТ» используется классификационная метка «НУЛЕВАЯ», и образец содержит 375 мг/дл гемоглобина (классификационная метка «ВЫСОКАЯ»), то классификатор образца 1320 будет иметь вид «НулеваяНулеваяВысокая». На ФИГ. 54 представлена блок–схема, схематически иллюстрирующая пример классифицирующего устройства 1126, изображенного на ФИГ. 42. Как описано выше, классифицирующее устройство 1126 функционирует с возможностью приема одного или более цветовых параметров 1134 и генерации результата 1138 классификации образца. Классифицирующее устройство 1126 дополнительно принимает классификационные данные 1136 для генерации результата 1138 классификации образца. В некоторых вариантах осуществления классифицирующее устройство 1126 генерирует данные 1330 обратной связи. Как описано в настоящем документе, классифицирующее устройство 1126 встроено в прибор 100, так что для оценки качества образца не требуется отдельное устройство.
[0580] В некоторых вариантах осуществления цветовые параметры 1134 включают в себя по меньшей мере один из цветовых параметров 1232, 1234, 1236, 1242, 1244 и 1246, как описано выше. В других вариантах осуществления классифицирующее устройство 1126 использует все из цветовых параметров 1232, 1234, 1236, 1242, 1244 и 1246. В других вариантах осуществления классифицирующее устройство 1126 использует другие типы цветовых параметров.
[0581] В некоторых вариантах осуществления классифицирующее устройство 1126 функционирует с возможностью обработки цветовых параметров 1134 и выбора одного из списка классификационных идентификаторов 1310 образца в качестве результата 1138 классификации образца. Результат 1138 классификации образца включает в себя один из классификационных идентификаторов 1310 образца, который по существу является показателем качества или целостности образца. Таким образом, выходной сигнал устройства 1112 определения качества образца не является количественным показателем уровня или концентрации мешающих компонентов, содержащихся в образце. Вместо этого устройство 1112 определения качества образца выводит классификатор (т.е. классификационный идентификатор), который представляет собой простое указание на качество образца.
[0582] Если образец содержит множество представляющих интерес мешающих компонентов, такие мешающие компоненты могут иметь спектральное перекрытие, так что один мешающий компонент влияет на обнаружение других мешающих компонентов. Например, в случаях, когда мешающими компонентами в образце являются гемоглобин (красного цвета или т. п.), билирубин (желтого цвета или т. п.) и липид (белого цвета или т. п.), области поглощения гемоглобина, билирубина и липида по меньшей мере частично перекрываются и, таким образом, затрудняют различение мешающих компонентов. Соответственно, желательно упростить результат анализа качества образца с помощью классификатора образца, а не выводить конкретные количества или концентрации мешающих компонентов.
[0583] В некоторых вариантах осуществления классифицирующее устройство 1126 использует данные 1330 обратной связи, выполненные с возможностью улучшения работы классифицирующего устройства 1126. Данные 1330 обратной связи могут включать в себя информацию о корреляции между введенными цветовыми параметрами 1134 и выводимым результатом 1138 классификации образца. Данные 1330 обратной связи подают на вход и используют для улучшения будущих операций путем дополнительного обучения классифицирующего устройства 1126.
[0584] В некоторых вариантах осуществления в классифицирующем устройстве 126 используется модель машинного обучения. Например, в классифицирующем устройстве 126 используется модель по методу опорных векторов (SVM), которая представляет собой модель управляемого обучения с одним или более связанными алгоритмами обучения, анализирующими данные, используемые для классификации. В других вариантах осуществления также могут использоваться другие модели, такие как логистическая регрессия, нейронные сети, сверточные нейронные сети и классификационные деревья.
[0585] Как проиллюстрировано на ФИГ. 54, некоторые варианты осуществления классифицирующего устройства 1126 осуществляют операцию 1340 обучения и нормальную работу 1342. В ходе операции 1340 обучения классифицирующее устройство 1126, использующее алгоритм обучения SVM, строит модель из набора образцов обучающих примеров, каждый из которых помечен как относящийся к одной из классификаций образцов. Модель относит новые примеры к одной или другой классификации, что делает ее невероятностным бинарным линейным классификатором. Модель SVM является представлением примеров в виде точек в пространстве, картированном таким образом, что примеры отдельных классификаций разделены четким промежутком, который является максимально широким. Затем новые примеры картируются в том же пространстве и делается прогноз их принадлежности к классификации на основании того, на какую сторону промежутка они попадают. Альтернативно модель SVM может выполнять нелинейную классификацию с использованием ядерных способов (например, радиальной базисной функции), картируя их входные данные в многомерные пространства признаков. Например, модель SVM создает гиперплоскость или набор гиперплоскостей в многомерном или бесконечномерном пространстве, которые могут использоваться для классификации. Хорошее разделение достигается при помощи гиперплоскости, имеющей наибольшее расстояние до ближайших точек обучающих данных любого класса, поскольку, как правило, чем больше зазор, тем ниже ошибка обобщения у классификатора.
[0586] В проиллюстрированном в настоящем документе примере имеющее размерность пространство для SVM формируется из вышеописанного профиля RGB, что дает шестимерное прогнозирующее пространство, соответствующее шести цветовым параметрам. Как описано выше, целевая переменная для классификации создается путем преобразования измеренных значений мешающих компонентов (например, гемоглобина, состояния желтухи и липемии, которые в настоящем документе в совокупности именуются HIL) для каждого образца в набор меток на основании диапазона концентраций по индивидуальным данным HIL. Относящиеся к образцу метки каждого мешающего вещества комбинируют в одну метку, которая классифицирует диапазоны всех трех компонентов HIL. Это общая классификационная метка образца, которая служит целевой переменной для классификатора SVM.
[0587] В некоторых вариантах осуществления классификатор SVM настраивается с помощью гиперпараметра, известного как «ню», который регуляризует число опорных векторов и ошибок обучения. Классификатор реализуется, например, на языке Python с использованием модуля Sci–Kit Learn, который имеет встроенную поддержку ню–регуляризованных классификаторов SVM (таких как «sklearn.svm.NuSvc»).
[0588] После определения модели SVM в ходе операции 1340 обучения классифицирующее устройство 1126 готово к нормальной работе 1342, при которой качество образца пациента оценивают для лабораторного анализа в приборе 100 на месте. В некоторых вариантах осуществления классифицирующее устройство 1126 предварительно обучают до установки прибора 100 на месте у заказчика. В других вариантах осуществления классифицирующее устройство 1126 продолжает получать обновленные данные обратной связи 1330 при нормальной работе 1342. В других вариантах осуществления классифицирующее устройство 1126 может настраиваться пользователем.
[0589] На ФИГ. 55 представлен пример набора 1350 данных результатов 1138 классификации образца и связанных с ними отмеченных флагом результатов 1352. Как описано со ссылкой на ФИГ. 43, устройство 1112 определения целостности образца генерирует отмеченный флагом результат, указывающий на то, имеет ли аспирированный образец 1130 качество, подходящее для последующих процессов (операция 1162 на ФИГ. 43). Как проиллюстрировано на ФИГ. 55, считается, что один или более из результатов 1138 классификации образца указывают на то, что соответствующие образцы не имеют достаточного качества для лабораторного анализа в приборе 100. Образцы, связанные с такими результатами 1138 классификации образца, могут быть помечены флагом для указания на неподходящее качество образцов. Для примера, набор 1350 данных иллюстрирует, какой результат классификации образца представляет образец, который необходимо отметить флагом.
[0590] Как описано на ФИГ. 42–55, устройство 1112 определения качества образца функционирует с возможностью преобразования сложного пространства переменных (связанного с множеством цветовых параметров) в простой выходной сигнал (включающий классификатор образца), который показывает качество образца. Выводимый результат 1138 классификации образца используют для информирования пользователя о том, был ли образец должным образом подготовлен, чтобы обеспечить достаточное качество или целостность для лабораторного анализа.
[0591] Устройство 1112 определения качества образца может быть модифицировано для различных областей применения. Например, устройство 1112 определения качества образца может применяться для любого анализатора диагностики in vitro, для любой пробирки с образцом или реакционного сосуда и для любой формы контейнера. В некоторых вариантах осуществления устройство 1122 оценки изображения в устройстве 1112 определения качества образца не обязательно должно использовать предварительно заданную область интереса для обработки изображения. Блок камеры устройства 1120 захвата изображения может иметь любой тип или качество. Устройство 1112 определения качества образца в соответствии с примером осуществления может использовать камеру потребительского уровня, такую как камеры, входящие в мобильные устройства. Источник света, используемый в устройстве 1120 захвата изображения, может быть размещен в любом положении. В некоторых вариантах осуществления классифицирующее устройство 1126 может обучаться на местах у заказчиков. В других вариантах осуществления классифицирующее устройство 1126 может быть адаптировано с помощью алгоритма обучения для корректировки рабочих характеристик на основании уникальной совокупности образцов пациентов и значений мешающих компонентов (например, HIL).
[0592] На ФИГ. 56–68 представлен пример устройства 1114 определения выравнивания наконечника.
[0593] На ФИГ. 56 представлена блок–схема примера устройства 1114 определения выравнивания наконечника. Устройство 1114 определения выравнивания наконечника предназначено для определения смещения дозирующего наконечника 112 и коррекции определенного объема текучего вещества, содержащегося в дозирующем наконечнике 112.
[0594] В некоторых вариантах осуществления устройство 1500 определения объема на основании изображения функционирует с возможностью захвата изображения дозирующего наконечника 112, содержащего аспирированное текучее вещество, такое как образец, и расчета объема текучего вещества на основании изображения дозирующего наконечника 112. Пример устройства 1500 определения объема на основании изображения включает в себя устройство 400 определения объема дозирующего наконечника, описанное в настоящем документе. Например, как описано в настоящем документе, устройство 152 пипетирования образцов используют для аспирации образца в дозирующий наконечник 112, а устройство 400 определения объема дозирующего наконечника захватывает изображение дозирующего наконечника с использованием блока 130 захвата изображения дозирующего наконечника и рассчитывает объем аспирированного образца путем анализа захваченного изображения.
[0595] В некоторых вариантах осуществления определенный объем текучего вещества (например, образца) в дозирующем наконечнике 112 не всегда точен из–за различных погрешностей и смещения, как показано на ФИГ. 57 и 58. Соответственно, объем 1502 определяется с некоторыми ошибками.
[0596] Устройство 1114 определения выравнивания наконечника функционирует с возможностью определения по меньшей мере смещения дозирующего наконечника 112 относительно модуля 512 пипетирования образцов и/или блока 130 захвата изображения дозирующего наконечника. Смещение дозирующего наконечника 112 приводит к ошибкам при определении аспирированного объема образца в дозирующем наконечнике 112. Устройство 1114 определения выравнивания наконечника функционирует с возможностью коррекции объема вещества, обнаруженного устройством 1500 определения объема на основании изображения (например, устройством 400 определения объема дозирующего наконечника), и обеспечения скорректированного объема аспирированного вещества 1504.
[0597] Как описано в настоящем документе, устройство 1114 определения выравнивания наконечника и устройство 1500 определения объема на основании изображения могут быть частью прибора 100 и, следовательно, могут функционировать совместно с системами, устройствами, компонентами, двигателями и другими частями прибора 100, как описано в настоящем документе.
[0598] На ФИГ. 57 представлен вид в поперечном разрезе примера дозирующего наконечника 112, на котором проиллюстрированы возможные погрешности в конфигурации дозирующего наконечника 112. Дозирующий наконечник 112 выполнен с допустимыми отклонениями в одном или более измерениях. Некоторые из таких измерений включают в себя длину L10, L11 и L12, а также ширину или диаметр D10, D11 и D12. Отклонения, допустимые для дозирующего наконечника 112, могут повлиять на объем вещества, содержащегося в дозирующем наконечнике 112.
[0599] На ФИГ. 58 схематично проиллюстрирован пример смещения дозирующего наконечника 112. Как проиллюстрировано, когда дозирующий наконечник 112 (также называемый в настоящем документе 112) зацепляется с модулем 512 пипетирования образцов, таким как сердечник 528, дозирующий наконечник 112 не всегда имеет желаемое расположение. В некоторых вариантах осуществления может быть желательно расположить дозирующий наконечник 112 вертикально или на одной линии с сердечником 526. Однако дозирующий наконечник 112 может иметь наклон относительно сердечника 526 и объем вещества 540 может быть по–разному виден со стороны блока 130 захвата изображения дозирующего наконечника. Таким образом, смещение дозирующего наконечника 112 может влиять на точность определения объема вещества 540, аспирированного в дозирующий наконечник 112.
[0600] На ФИГ. 59 проиллюстрированы возможные типы смещения дозирующего наконечника 112. На схеме 1 показано положение дозирующего наконечника 112 относительно блока камеры устройства 130 захвата изображения дозирующего наконечника. Если ось Z определить как ось, вдоль которой по существу проходит дозирующий наконечник 112, ось X определяется как направление, вдоль которого дозирующий наконечник 112 можно наклонять слева направо или справа налево по отношению к блоку камеры блока 130 захвата изображения дозирующего наконечника, как показано на схеме 2. Когда дозирующий наконечник 112 наклонен в направлении оси X, такое смещение может быть представлено углом бокового смещения C, как показано на схеме 2 («боковое смещение»). Ось Y определяется как направление, вдоль которого дозирующий наконечник 112 может быть наклонен от блока камеры или к нему, как показано на схеме 3. Когда дозирующий наконечник 112 наклонен в направлении оси Y, такое смещение может быть представлено углом D смещения по глубине, как показано на схеме 3 («смещение по глубине»). Такое смещение по глубине не выявляется на двухмерном изображении, захваченном блоком 130 захвата изображения наконечника.
[0601] На ФИГ. 60A представлен вид сбоку в поперечном сечении примера дозирующего наконечника 1510, выполненного с возможностью использования с устройством 1114 определения выравнивания наконечника. Дозирующий наконечник 1510 в этом примере выполнен аналогично дозирующему наконечнику 112, описанному со ссылкой на ФИГ. 13 и 14. Таким образом, описание дозирующего наконечника 1510 ограничено главным образом отличиями от дозирующего наконечника 112, а другие описания опущены для краткости.
[0602] В этом примере дозирующий наконечник 1510 включает в себя первую опорную линию 1512 и вторую опорную линию 1514, как лучше проиллюстрировано на ФИГ. 60B и 60C (которые представляют собой увеличенные изображения частей дозирующего наконечника с ФИГ. 60A). В некоторых вариантах осуществления первая и вторая опорные линии 1512 и 1514 используются для определения бокового смещения дозирующего наконечника, как описано со ссылкой на ФИГ. 62. Кроме того, по меньшей мере одна из первой и второй опорных линий 1512 и 1514 используется для определения смещения дозирующего наконечника по глубине, как описано на ФИГ. 62.
[0603] В некоторых вариантах осуществления опорные линии 1512 и 1514 выполнены с возможностью обнаружения блоком 130 захвата изображения дозирующего наконечника. Опорные линии 1512 и 1514 могут быть образованы в различных местоположениях дозирующего наконечника 1510. В некоторых вариантах осуществления первая опорная линия 1512 размещена таким образом, что уровень поверхности или мениск аспирированного вещества расположен ниже первой опорной линии 1512 (т.е. между первой опорной линией 1512 и дистальным концом 562 дозирующего наконечника 1510). В других вариантах осуществления первая опорная линия 1512 размещена таким образом, что мениск аспирированного вещества расположен над первой опорной линией 1512 относительно дистального конца 562 (т.е. между опорной линией 570 и проксимальным концом 560). В некоторых вариантах осуществления первая опорная линия 1512 соответствует опорной линии 570, показанной на ФИГ. 13.
[0604] Вторая опорная линия 1514 может быть расположена рядом с дистальным концом 562 дозирующего наконечника 1510 относительно первой опорной линии 1512. В качестве примера, первая опорная линия 1512 размещена таким образом, что линия поверхности аспирированного вещества объемом 100 мкл расположена ниже первой опорной линии 1512 (т.е. между первой опорной линией 1512 и дистальным концом 562 дозирующего наконечника 1510), тогда как вторая опорная линия 1514 размещена таким образом, что линия поверхности аспирированного вещества объемом 2 мкл расположена над второй опорной линией 1512 (т.е. между первой опорной линией 1512 и второй опорной линией 1514).
[0605] Первая и вторая опорные линии 1512 и 1514 обеспечены на дозирующем наконечнике 1510 различными способами. В некоторых вариантах осуществления опорные линии представляют собой выполненные с возможностью обнаружения структуры, такие как выступы, гребни, углубления, вырезы или любые другие видимые элементы, образованные на дозирующем наконечнике. В других вариантах осуществления опорные линии представляют собой маркеры или индикаторы, нарисованные или прикрепленные к дозирующему наконечнику. Опорные линии могут быть образованы на или сформованы как одно целое с дозирующим наконечником. Альтернативно опорные линии выполнены отдельно и прикреплены к дозирующему наконечнику.
[0606] На ФИГ. 61 представлена функциональная схема, иллюстрирующая пример способа 1550 оценки смещения дозирующего наконечника. В некоторых вариантах осуществления способ 1550 выполняется устройством 1114 определения выравнивания наконечника. В других вариантах осуществления другая часть прибора 100 может выполнять способ 1550 вместе с устройством 1114 определения выравнивания наконечника или вместо него.
[0607] При операции 1552 прибор 100, такой как система 510 аспирации образца, аспирирует текучее вещество, такое как образец, в дозирующий наконечник 1510 как запрограммировано.
[0608] При операции 1554 прибор 100, такой как система 510 аспирации образца, перемещает дозирующий наконечник 1510, содержащий аспирированный образец, в блок 130 захвата изображения дозирующего наконечника. В некоторых вариантах осуществления блок 130 захвата изображения дозирующего наконечника выполнен с возможностью захвата изображения дозирующего наконечника после аспирации без перемещения. Далее блок 130 захвата изображения дозирующего наконечника захватывает изображение дозирующего наконечника 1510. В некоторых вариантах осуществления изображение дозирующего наконечника 1510 представляет собой цифровое изображение с заданным разрешением.
[0609] При операции 1556 прибор 100, такой как устройство 1500 определения объема на основании изображения (например, устройство 400 определения объема дозирующего наконечника или устройство 500 определения объема аспирации образца, как показано на ФИГ. 9), обнаруживает объем вещества в дозирующем наконечнике 1510 посредством анализа захваченного изображения. Один пример операции 1556 описан со ссылкой, например, на ФИГ. 16–19.
[0610] При операции 1558 прибор 100, такой как устройство 1114 определения выравнивания наконечника, обнаруживает смещение дозирующего наконечника 1510 по захваченному изображению. Пример операции 1558 описан со ссылкой на ФИГ. 62–68.
[0611] При операции 1560 прибор 100, такой как устройство 1114 определения выравнивания наконечника, функционирует с возможностью коррекции определенного объема (определенного в операции 1556) на основании определения смещения (определенного в операции 1558).
[0612] На ФИГ. 62 представлена функциональная схема, иллюстрирующая пример способа 1570 определения смещения дозирующего наконечника. В этом способе устройство 1114 определения выравнивания наконечника может обнаруживать боковое смещение, как показано на схеме 2 на ФИГ. 59 (при операции 1572), и смещение по глубине, как показано на схеме 3 на ФИГ. 59 (при операции 1574).
[0613] На ФИГ. 63 представлена функциональная схема, иллюстрирующая другой пример способа 1600 определения смещения дозирующего наконечника. Способ 1600 описан также со ссылкой на ФИГ. 64, на которой схематически проиллюстрирован пример изображения, демонстрирующий боковое смещение дозирующего наконечника.
[0614] В этом способе боковое смещение может быть обнаружено с помощью операций 1602, 1604, 1606, 1608, 1610, 1612 и 1614. Смещение по глубине может быть обнаружено с помощью операций 1602, 1622, 1624 и 1626. В некоторых вариантах осуществления боковое смещение может быть определено в рамках процесса определения объема, который, например, выполняется устройством 400 определения объема дозирующего наконечника или устройством 500 определения объема аспирации образца, как описано в настоящем документе. Например, операции 1602, 1604, 1606, 1608 и 1616 идентичны или аналогичны некоторым операциям, выполняемым устройством 400 определения объема дозирующего наконечника или устройством 500 определения объема аспирации образца, и, следовательно, могут быть заменены такими операциями устройства 400 определения объема дозирующего наконечника или устройства 500 определения объема аспирации образца.
[0615] При операции 1602 устройство 1114 определения выравнивания наконечника получает изображение дозирующего наконечника 1510. Изображение дозирующего наконечника 1510 может быть захвачено блоком 130 захвата изображения дозирующего наконечника.
[0616] При операции 1604 устройство 1114 определения выравнивания наконечника обнаруживает заданную точку 1640 первой опорной линии 1512 дозирующего наконечника 1510. В некоторых вариантах осуществления заданная точка 1640 представляет собой центр первой опорной линии 1512. В других вариантах осуществления можно использовать другие точки первой опорной линии 1512.
[0617] При операции 1606 устройство 1114 определения выравнивания наконечника обнаруживает заданную точку 1642 мениска 1632 текучего вещества 1630, содержащегося в дозирующем наконечнике 1510. В некоторых вариантах осуществления заданная точка 1642 представляет собой центр мениска вещества в дозирующем наконечнике. В других вариантах осуществления можно использовать другие точки мениска.
[0618] В других вариантах осуществления вместо мениска текучего вещества используется вторая опорная линия 1514. В этом варианте осуществления устройство 1114 определения выравнивания наконечника обнаруживает заданную точку (например, центр) второй опорной линии дозирующего наконечника.
[0619] При операции 1608 устройство 1114 определения выравнивания наконечника соединяет точки 1640 и 1642 для образования линии 1634 между точками 1640 и 1642.
[0620] При операции 1620 устройство 1114 определения выравнивания наконечника определяет угол C линии 1634 относительно опорной линии 1636. В некоторых вариантах осуществления опорная линия 1636 параллельна вертикальной линии на изображении, захваченном блоком 130 захвата изображения дозирующего наконечника. В других вариантах осуществления в качестве опорной линии 1636 могут использоваться другие линии.
[0621] Хотя для определения линии 1634 используются первая опорная линия 1512 и мениск 1632 аспирированного вещества 1630, для образования линии 1634 можно использовать другие опорные линии или точки. Например, любую комбинацию первой опорной линии 1512, второй опорной линии 1514, мениска 1632 аспирированного вещества, других частей дозирующего наконечника 1510 и любой части модуля 512 пипетирования образцов, которая зацепляет дозирующий наконечник 1510.
[0622] При операции 1612 устройство 1114 определения выравнивания наконечника определяет, является ли угол C меньше порогового значения. Пороговое значение представляет собой максимальный приемлемый угол наклона дозирующего наконечника. При наклоне дозирующего наконечника под углом, превышающим пороговое значение угла, определенный объем вещества считается неприемлемым для получения надежного результата. В некоторых вариантах осуществления пороговое значение угла находится в диапазоне от приблизительно 0,5 до приблизительно 5 градусов. В других вариантах осуществления пороговое значение угла находится в диапазоне от приблизительно 1 до приблизительно 3 градусов. В других вариантах осуществления пороговое значение угла составляет приблизительно 2 градуса.
[0623] Если определено, что угол C линии 1634 меньше порогового значения угла («ДА» при данной операции), то способ 1600 переходит к операции 1616. В противном случае («НЕТ» в данной операции) способ 1600 переходит к операции 1614, при которой устройство 1114 определения выравнивания наконечника отмечает аспирацию флагом, указывая на то, что аспирация объема в дозирующий наконечник не подходит для последующих процессов. При операции 1614 может быть выполнена другая аспирация с использованием другого дозирующего наконечника для повтора операции 1602 и последующих операций.
[0624] При операции 1616 объем вещества в дозирующем наконечнике получают с использованием захваченного изображения. В некоторых вариантах осуществления устройство 400 определения объема дозирующего наконечника или устройство 500 определения объема аспирации образца могут выполнять эту операцию так, как описано в настоящем документе.
[0625] При операции 1618 устройство 1114 определения выравнивания наконечника определяет, превышает ли определенный объем пороговое значение объема. Пороговое значение объема представляет собой максимальный объем в дозирующем наконечнике, на который может повлиять (или существенно повлиять) боковое смещение и/или смещение по глубине. Если объем вещества, содержащегося в дозирующем наконечнике, больше этого порогового значения, считается, что боковое смещение и смещение по глубине не оказывает существенного влияния на определение объема в дозирующем наконечнике, и расчет такого объема в дозирующем наконечнике является приемлемым независимо от бокового смещения и смещения по глубине. Если объем вещества, содержащегося в дозирующем наконечнике, меньше этого порогового значения или равен ему, считается, что боковое смещение или смещение по глубине может существенно повлиять на определение объема на основании захваченного изображения, и расчет такого объема будет неприемлемым.
[0626] В некоторых вариантах осуществления пороговое значение объема находится в диапазоне от приблизительно 3 до приблизительно 30 мкл. В других вариантах осуществления пороговое значение объема находится в диапазоне от приблизительно 5 до приблизительно 20 мкл. В других вариантах осуществления пороговое значение угла составляет приблизительно 10 мкл.
[0627] Если установлено, что определенный объем больше порогового значения объема («ДА» в данной операции), то способ 1600 переходит к операции 1620, при котором рассчитанный объем регистрируется. В противном случае («НЕТ» в данной операции) способ 1600 переходит к операции 1622 и последующим операциям.
[0628] При операции 1622 устройство 1114 определения выравнивания наконечника функционирует с возможностью коррекции определенного объема с использованием второй опорной линии 1514. Пример способа коррекции объема с использованием второй опорной линии описан со ссылкой на ФИГ. 65 и 66.
[0629] В проиллюстрированном примере преимущественно описано, что если угол не удовлетворяет пороговому значению угла, то аспирация, выполненная в дозирующий наконечник, отмечается флагом. Альтернативно способ 1600 может быть выполнен до аспирации конкретного вещества, такого как реагент, образец или субстрат, в дозирующий наконечник. В этой конфигурации, если угол не удовлетворяет пороговому значению угла, устройство 1114 определения выравнивания наконечника может функционировать с возможностью предотвращения аспирации нужного вещества в дозирующий наконечник или функционировать с возможностью генерации уведомления о том, что аспирация такого необходимого вещества не должна выполняться или должна выполняться с осторожностью.
[0630] На ФИГ. 65 представлена функциональная схема, иллюстрирующая пример способа 1650 коррекции объема с использованием второй опорной линии. Способ 1650 может начинаться с операции 1652, в которой устройство 1114 определения выравнивания наконечника получает изображение дозирующего наконечника 1510, как в операции 1602 на ФИГ. 63.
[0631] При операции 1654 устройство 1114 определения выравнивания наконечника измеряет длину второй опорной линии 1514 на захваченном изображении.
[0632] При операции 1656 устройство 1114 определения выравнивания наконечника рассчитывает соотношение между измеренной длиной второй опорной линии 1514 и фактической длиной второй опорной линии 1514. Фактическая длина второй опорной линии 1514 известна. Например, фактическая длина второй опорной линии 1514 может быть измерена на основании реальной модели или продукта–дозирующего наконечника 1510 или по изображению дозирующего наконечника 1510, который не имеет смещения.
[0633] Длина второй опорной линии 1514, измеренная по захваченному изображению, будет отличаться от фактической длины второй опорной линии 1514, где дозирующий наконечник 1510 имеет наклон в направлении Y, как показано на схеме 3 на ФИГ. 59. Таким образом, соотношение между измеренной длиной и фактической длиной второй опорной линии 1514 может указывать на степень смещения по глубине у дозирующего наконечника (т.е. насколько дозирующий наконечник наклонен в направлении Y, как показано на схеме 3 на ФИГ. 59).
[0634] При операции 1658 устройство 1114 определения выравнивания наконечника функционирует с возможностью коррекции определенного объема вещества с использованием соотношения. Поскольку соотношение между измеренной длиной и фактической длиной второй опорной линии 1514 коррелирует со степенью смещения дозирующего наконечника по глубине, это соотношение также коррелирует с объемом вещества, определенным по захваченному изображению. Таким образом, соотношение можно использовать для регулирования объема вещества в дозирующем наконечнике, оцениваемого по захваченному изображению.
[0635] Хотя главным образом описано, что в операциях 1652, 1654, 1656 и 1658 используется вторая опорная линия 1514, для тех же операций можно использовать другие опорные линии или точки. Например, вместо второй опорной линии 1514 могут использоваться первая опорная линия 1512 или другие элементы в дозирующем наконечнике 1510.
[0636] В проиллюстрированном примере главным образом описано, что для корректировки измеренного объема используется соотношение между измеренной длиной второй опорной линии 1514 и фактической длиной второй опорной линии 1514. Однако в другом варианте осуществления способ 1650 может быть выполнен до аспирации конкретного вещества, такого как реагент, образец или субстрат, в дозирующий наконечник. При данном применении, если соотношение не удовлетворяет заданному пороговому значению, устройство 1114 определения выравнивания наконечника может функционировать с возможностью предотвращения аспирации нужного вещества в дозирующий наконечник или функционировать с возможностью генерации уведомления о том, что аспирация такого нужного вещества не должна выполняться или должна выполняться с осторожностью.
[0637] На ФИГ. 66 представлена функциональная схема, иллюстрирующая другой пример способа 1670 коррекции объема с использованием второй опорной линии. Способ 1650 описан также со ссылкой на ФИГ. 67, которая схематически иллюстрирует смещение дозирующего наконечника по глубине по отношению к блоку камеры.
[0638] При этом способе 1670 операции 1672, 1674 и 1676 идентичны или аналогичны операциям 1652, 1654 и 1656, изображенным на ФИГ. 65, и, следовательно, описания этих операций для краткости не приводятся.
[0639] При операции 1678 устройство 1114 определения выравнивания наконечника рассчитывает угол D глубины (схема 3 на ФИГ. 59 и ФИГ. 67) на основании соотношения, рассчитанного во время операции 1676. Угол D глубины представляет собой угол, под которым дозирующий наконечник наклоняется в направлении Y (т.е. в направлении глубины), и он коррелирует с соотношением.
[0640] При операции 1680 устройство 1114 определения выравнивания наконечника рассчитывает интересующую линию E’ на основании угла D глубины. Интересующая линия E’ представляет собой линию, соединяющую проксимальный конец 1684 дозирующего наконечника с линией 1685 перспективы камеры, проходящей между камерой и центром 1686 второй опорной линии 1514 надлежащим образом выровненного дозирующего наконечника (т.е. выровненного по вертикальной линии 1687). Интересующая линия E’ проходит перпендикулярно от линии 1685 перспективы камеры к проксимальному концу 1684 дозирующего наконечника.
[0641] В некоторых вариантах осуществления интересующая линия E’ может быть рассчитана с использованием линии E и угла D’, как показано на ФИГ. 67. В некоторых вариантах осуществления угол D’ можно аппроксимировать углом D глубины, где углы D’ и D относительно малы. Линия E представляет собой линию, проходящую между проксимальным концом 1684 дозирующего наконечника и линией 1688 перспективы камеры. Линия 1688 перспективы камеры проходит от камеры и центра 1689 второй опорной линии 1514 смещенного дозирующего наконечника 1690 (т.е. смещенного под углом D глубины). Таким образом, интересующая линия E’ соответствует корректировке или компенсации для линии E, полученной по смещенному дозирующему наконечнику.
[0642] В некоторых вариантах осуществления, как проиллюстрировано на ФИГ. 67, устройство 1114 определения выравнивания наконечника включает в себя или использует блок 2550 камеры, который входит в блок 130 захвата изображения дозирующего наконечника (ФИГ. 10). Как проиллюстрировано на ФИГ. 2, блок 2550 камеры установлен на блоке 152B прецизионного пипетирования образца («устройстве прецизионного пипетирования образца»). Как описано выше, блок 2550 камеры и связанные с ним компоненты выполнены аналогично блоку 550 камеры и связанным с ним компонентам (например, источнику 551 света, источнику 552 света и экрану 553). Одним из примеров блока 2550 камеры является камера AE3–IS Machine Vision Camera+плата ввода/вывода, такая как с № по кат. AE3–IS–CQBCKFP2–B, доступная от компании Cognex Corporation (г. Натик, штат Массачусетс, США).
[0643] При операции 1682 устройство 1114 определения смещения наконечника корректирует определенный объем на основании интересующей линии E’.
[0644] На ФИГ. 68 представлен пример таблицы данных 1694 определения объема до и после коррекции, выполненной устройством 1114 определения смещения наконечника. В таблице 1994 во втором столбце показаны определенные объемы вещества, аспирированного в дозирующий наконечник, перед коррекцией, а в третьем столбце показаны объемы вещества после коррекции с использованием устройства 1114 определения выравнивания наконечника.
[0645] На ФИГ. 69–79 представлен пример системы 124 контроля концентрации частиц.
[0646] На ФИГ. 69 представлена блок–схема примера системы 124 контроля концентрации частиц, изображенной на ФИГ. 1. В некоторых вариантах осуществления система 124 контроля концентрации частиц включает в себя систему 1700 контроля концентрации частиц в реакционном сосуде.
[0647] Система 1700 контроля концентрации частиц в реакционном сосуде функционирует с возможностью определения концентрации частиц в текучем веществе, содержащемся в реакционном сосуде. В других вариантах осуществления систему 1700 контроля концентрации частиц в реакционном сосуде можно также использовать для определения концентрации частиц в сосудах других типов, таких как сосуд с образцом, сосуд для разбавителя и кювета, которые используются в ходе процесса в приборе 100. В некоторых вариантах осуществления система 1700 контроля концентрации частиц в реакционном сосуде использует блок 132 захвата изображения сосуда, описанный в настоящем документе.
[0648] При применении в клинической диагностике для генерации специфического сигнала, как правило, используют отделение несвязавшихся веществ с использованием парамагнитных частиц. Однако из–за определенной погрешности могут оставаться частицы разных размеров, что может затруднять обеспечение постоянного коэффициента удержания частиц на протяжении одной или более стадий промывки. Существует несколько факторов, влияющих на потерю частиц при промывке. К примерам таких факторов относятся смещение дозирующего наконечника, позиционирование реакционного сосуда и изменение скорости вращения при повторном суспендировании. Однако такие факторы невозможно точно контролировать.
[0649] Как показано на ФИГ. 4, одним из примеров способа измерения концентрации частиц или коэффициента удержания частиц является использование меченных парамагнитных частиц (например, при помощи щелочной фосфатазы) как средства для прямого измерения количества частиц, оставшихся после промывки. Сигнал, такой как свет, который генерируется меченными парамагнитными частицами, измеряют для оценки концентрации частиц, предполагая, что сигнал пропорционален количеству частиц. Однако для получения результатов при этом способе может потребоваться время на проведение ферментативной реакции (например, по меньшей мере приблизительно 5 минут). Способ также требует сравнения результата после однократной промывки и результата после двух промывок для расчета потери парамагнитных частиц на промывку. Для получения средства диагностики, такого как меченные частицы, требуются дополнительные затраты. Активность щелочной фосфатазы и связывающая способность проявляются недолго и, таким образом, необходимо изучить и определить период стабильности.
[0650] Система 1700 контроля концентрации частиц в реакционном сосуде функционирует с возможностью идентификации коэффициента удержания частиц путем анализа изображения реакционного сосуда. Система 1700 контроля концентрации частиц в реакционном сосуде может генерировать калибровочные данные на месте путем создания разных концентраций частиц в реакционных сосудах.
[0651] Как описано в настоящем документе, система 1700 контроля концентрации частиц в реакционном сосуде является частью прибора 100 и, следовательно, функционирует в соединении с системами, устройствами, компонентами, двигателями и другими частями прибора 100, как описано в настоящем документе.
[0652] На ФИГ. 70 показаны примеры изображений 1701 реакционного сосуда с разными концентрациями частиц. На изображении слева показано текучее вещество 1708 в реакционном сосуде 1707, таком как кювета 320 (ФИГ. 4) и реакционный сосуд 728 (ФИГ. 23), содержащее меньше частиц, чем на других изображениях. На изображении в центре показано, что текучее вещество в реакционном сосуде содержит больше частиц, чем на левом изображении, и меньше частиц, чем на правом изображении. На изображении справа показано, что текучее вещество в реакционном сосуде содержит больше частиц, чем на других изображениях. Как показано, при увеличении концентрации парамагнитных частиц мутность повышается и, таким образом, яркость соответственно изменяется. По мере увеличения количества частиц в реакционном сосуде количество фотонов, которые генерируются подсветкой реакционного сосуда и проходят через реакционный сосуд, становится более низким. Соответственно, изменяется яркость захваченного камерой изображения реакционного сосуда.
[0653] Яркость изображения реакционного сосуда может зависеть не только от концентрации частиц в реакционном сосуде, но и от времени экспозиции камеры. Оптимальное время экспозиции камеры может быть определено в зависимости от типа анализа и желательной концентрации частиц. Дополнительно вариабельность измерения концентрации частиц изменяется в зависимости от концентрации частиц. Таким образом, в некоторых вариантах осуществления для точного измерения необходимо использовать конкретный диапазон концентраций частиц.
[0654] На ФИГ. 71 представлена блок–схема примера системы 1700 контроля концентрации частиц в реакционном сосуде. В некоторых вариантах осуществления система 1700 контроля концентрации частиц в реакционном сосуде включает в себя устройство 1702 захвата изображения, устройство 1704 генерации калибровочных данных и устройство 1706 оценки изображения.
[0655] Устройство 1702 захвата изображения функционирует с возможностью захвата изображения 1701 текучего вещества 1708, содержащегося в реакционном сосуде 1707. В некоторых вариантах осуществления устройство 1702 захвата изображения использует блок 132 захвата изображения сосуда, который включает в себя блок 730 камеры и источник 732 света (или экран 733). В некоторых вариантах осуществления источник 732 света устройства 1702 захвата изображения создает белую подсветку. В других вариантах осуществления источник 732 света обеспечивает одну или более цветных подсветок, которые могут быть либо фиксированными, либо переменными во время захвата изображения.
[0656] Текучее вещество 1708 в реакционном сосуде 1707 содержит интересующие частицы, и концентрация частиц измеряется путем анализа изображения 1701. В некоторых вариантах осуществления текучее вещество 1708 включает в себя смесь образца, реагента, субстрата и/или других веществ. Один пример текучего вещества 1708 представляет собой смесь первого реагента 322, образца 324, второго реагента 332 и субстрата 340, как показано на ФИГ. 4. В примере, изображенном на ФИГ. 4, текучее вещество 1708 может представлять собой вещество после операции 310, в которой субстрат 340 дозируют в реакционный сосуд. Система 1700 контроля концентрации частиц в реакционном сосуде может измерять концентрацию меченных парамагнитных частиц в реакционном сосуде.
[0657] Устройство 1704 генерации калибровочных данных функционирует с возможностью генерации калибровочных данных, которые можно использовать для определения концентрации частиц в реакционном сосуде. Пример устройства 1704 генерации калибровочных данных описан со ссылкой на ФИГ. 73.
[0658] Устройство 1706 оценки изображения предназначено для оценки изображения реакционного сосуда, захваченного устройством 1702 захвата изображения. Захваченное изображение оценивают для определения концентрации частиц, содержащихся в реакционном сосуде 1707.
[0659] На ФИГ. 72 представлена функциональная схема, иллюстрирующая пример способа 1720 измерения концентрации частиц в текучем веществе, содержащемся в реакционном сосуде. В некоторых вариантах осуществления способ 1720 может выполняться системой 1700 контроля концентрации частиц в реакционном сосуде и/или другими частями прибора 100.
[0660] При операции 1712 в реакционный сосуд 1707 в соответствии с программой дозируется текучее вещество 1708. В некоторых вариантах осуществления реакционный сосуд 1707 поддерживается в несущем устройстве 720 для контейнеров. Примеры текучего вещества включают в себя образец, разбавитель, реагент, субстрат или любую их комбинацию, описанную в настоящем документе. Например, в диагностическом режиме промывочного колеса используют разбавители или реагенты. В некоторых вариантах осуществления реакционный сосуд 1707 уже содержит другие текучие вещества, такие как образец, и после дозирования текучего вещества 1708 в реакционный сосуд 1707 текучее вещество 1708 смешивается с другими жидкими веществами в реакционном сосуде 1707. Смешивание может осуществляться с помощью мешалки, находящейся в непосредственном контакте с жидкими веществами, ультразвукового зонда, находящегося в непосредственном или непрямом контакте с жидкими веществами, или любого другого подходящего смесительного устройства.
[0661] При операции 1714 несущее устройство 720 для контейнеров перемещает реакционный сосуд 1707, содержащий дозированное вещество, в блок 132 захвата изображения сосуда. В некоторых вариантах осуществления блок 132 захвата изображения сосуда размещен с возможностью захвата изображения реакционного сосуда 1707 после дозирования без транспортировки. В других вариантах осуществления дозирование при операции 1712 происходит в местоположении, где размещен блок 132 захвата изображения сосуда, и захват изображения реакционного сосуда 1707 происходит без перемещения реакционного сосуда 1707 после дозирования.
[0662] При операции 1716 блок 132 захвата изображения сосуда захватывает изображение 1701 реакционного сосуда 1707. В некоторых вариантах осуществления изображение 1701 реакционного сосуда 1707 представляет собой цифровое изображение с заданным разрешением. В некоторых вариантах осуществления блок 132 захвата изображения сосуда захватывает изображение 1702 реакционного сосуда 1707 после перемешивания в течение заданного периода времени. Например, блок 132 захвата изображения сосуда захватывает изображение 1702 реакционного сосуда 1707 через приблизительно 6,5 секунды перемешивания.
[0663] При операции 1718 система 1700 контроля концентрации частиц в реакционном сосуде анализирует изображение для определения коэффициента удержания интересующих частиц внутри реакционного сосуда 1707. Пример операции 1718 более подробно описан применительно к ФИГ. 76.
[0664] При операции 1720 система 1700 контроля концентрации частиц в реакционном сосуде определяет, соответствует ли измеренная концентрация частиц пороговому значению концентрации. Если измеренная концентрация частиц выходит за пределы порогового значения, дозирование текучего вещества в реакционный сосуд 1707 считается неверным. В некоторых вариантах осуществления пороговое значение концентрации варьирует в зависимости от разных типов исследуемых веществ. Примеры порогового значения концентрации описаны со ссылкой на ФИГ. 77.
[0665] Если измеренная концентрация частиц определяется как удовлетворяющая пороговому значению («ДА» при операции 1720), способ 1710 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 1720) способ 1710 переходит к операции 1722.
[0666] При операции 1722 система 1700 контроля концентрации частиц в реакционном сосуде отмечает флагом реакционный сосуд для указания на то, что вещество в реакционном сосуде не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовалось текучее вещество, может быть отмечен флагом для указания или предположения того, что результат исследования может быть неправильным. Альтернативно система 1700 контроля концентрации частиц в реакционном сосуде функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества.
[0667] На ФИГ. 73 представлена функциональная схема, иллюстрирующая пример способа 1730 генерации калибровочных данных. Способ 1730 описан также со ссылкой на ФИГ. 74, которая представляет собой таблицу 1750 примеров веществ, используемых для генерации калибровочных данных, и на ФИГ. 75, на которой показан пример калибровочных кривых 1760 и 1762, построенных на основе калибровочных данных. В некоторых вариантах осуществления способ 1730 выполняется устройством 1704 генерации калибровочных данных.
[0668] При операции 1732 в соответствующие реакционные сосуды дозируют множество веществ с разными концентрациями частиц. В качестве примера, как показано на ФИГ. 74, шесть веществ с шестью известными концентрациями частиц дозируют в шесть реакционных сосудов. При увеличении количества веществ калибровочные данные могут стать более точными и надежными.
[0669] В некоторых вариантах осуществления вещество с конкретной концентрацией частиц может быть получено путем первоначального дозирования заданного количества частиц в реакционный сосуд и дозирования заданного количества субстрата в реакционный сосуд. В примере на ФИГ. 74 первое вещество со 100% концентрацией получают путем дозирования 200 мкл частиц (например, парамагнитных частиц) и 0 мкл субстрата, второе вещество с 90% концентрацией частиц получают путем дозирования 180 мкл частиц и 20 мкл субстрата, третье вещество с 80% концентрацией частиц получают путем дозирования 160 мкл частиц и 40 мкл субстрата, четвертое вещество с 70% концентрацией частиц получают путем дозирования 140 мкл частиц и 60 мкл субстрата, пятое вещество с 60% концентрацией частиц получают путем дозирования 120 мкл частиц и 80 мкл субстрата и шестое вещество с 50% концентрацией частиц получают путем дозирования 100 мкл частиц и 100 мкл субстрата.
[0670] В проиллюстрированном варианте осуществления операцию 1732 выполняют путем одновременного дозирования веществ с разными концентрациями частиц во множество реакционных сосудов. В других вариантах осуществления вещества с разными концентрациями дозируют в реакционные сосуды одно за другим и каждый реакционный сосуд визуализируют и анализируют для определения яркости в последующих операциях.
[0671] При операции 1734 реакционные сосуды перемещают в блок 132 захвата изображения сосуда. В других вариантах осуществления реакционные сосуды размещены на месте заранее.
[0672] При операции 1736 блок 132 захвата изображения сосуда захватывает изображение каждого реакционного сосуда 1707. В некоторых вариантах осуществления захваченное изображение представляет собой цифровое изображение в оттенках серого. В других вариантах осуществления захваченное изображение представляет собой цветное цифровое изображение.
[0673] При операции 1738 каждое из захваченных изображений анализируют для определения яркости вещества, содержащегося в реакционном сосуде. В некоторых вариантах осуществления яркость идентифицируется по шкале серого, например, в диапазоне от 0 до 255. В других вариантах осуществления также возможны другие диапазоны.
[0674] При операции 1740 калибровочные данные генерируют путем сопоставления яркости вещества и известной концентрации частиц в веществе. После оценки всех веществ калибровочные данные можно вывести на график в виде калибровочной кривой, которую можно использовать в качестве основы для оценки концентрации частиц в исследуемом веществе.
[0675] Как описано в настоящем документе, в каждом анализе используется свой тип частиц и концентрация частиц для оптимизации характеристик. Таким образом, для разных анализов необходимо получать калибровочные данные и калибровочные кривые для точного определения концентраций частиц.
[0676] На ФИГ. 75 представлен пример набора калибровочных данных 1760 для вещества типа тропонина I (TnI) при времени экспозиции 2 мс. Пример набора калибровочных данных 1762 представлен для вещества типа общего трийодтиронина (TT3) при времени экспозиции 1 мс. Калибровочная кривая может быть построена с использованием точек данных, показанных в этих примерах.
[0677] На ФИГ. 76 представлена функциональная схема, иллюстрирующая пример способа 1770 измерения концентрации частиц в текучем веществе, содержащемся в реакционном сосуде. В некоторых вариантах осуществления способ 1770 выполняется системой 1700 контроля концентрации частиц в реакционном сосуде и/или другими частями прибора 100.
[0678] В этом способе 1770 операции 1772 и 1774 выполняют аналогично операциям 1712, 1714 и 1716, изображенным на ФИГ. 72. Следовательно, описание этих операций для краткости опущено.
[0679] При операции 1776 система 1700 контроля концентрации частиц в реакционном сосуде извлекает калибровочные данные, полученные в способе 1730.
[0680] При операции 1778 система 1700 контроля концентрации частиц в реакционном сосуде анализирует захваченное изображение для определения яркости вещества в реакционном сосуде. Затем система 1700 контроля концентрации частиц в реакционном сосуде определяет концентрацию частиц в реакционном сосуде на основании определенной яркости и калибровочных данных.
[0681] В некоторых вариантах осуществления яркость вещества на захваченном изображении может быть определена в виде числового значения, такого как значение шкалы серого из заданного диапазона (например, шкала серого от 0 до 255). В других вариантах осуществления для представления яркости вещества на захваченном изображении могут использоваться разные способы идентификации. После определения яркости вещества на захваченном изображении проводят поиск по калибровочным данным для нахождения значения концентрации частиц, соответствующего определенной яркости. Если калибровочные данные не имеют точной точки данных, соответствующей определенной яркости, значение концентрации может быть экстраполировано на основании известных точек данных. Альтернативно калибровочная кривая, полученная на основании калибровочных данных, может использоваться для определения концентрации частиц, оцениваемой в соответствии с яркостью вещества на захваченном изображении.
[0682] При операции 1780 система 1700 контроля концентрации частиц в реакционном сосуде определяет, соответствует ли измеренная концентрация частиц пороговому значению концентрации. Если измеренная концентрация частиц определяется как удовлетворяющая пороговому значению («ДА» при операции 1780), способ 1770 переходит к выполнению следующей заданной стадии. В противном случае («НЕТ» при операции 1780) способ 1770 переходит к операции 1782.
[0683] При операции 1782 система 1700 контроля концентрации частиц в реакционном сосуде отмечает флагом реакционный сосуд для указания на то, что вещество в реакционном сосуде не подходит для последующих процессов. В других вариантах осуществления весь результат исследования, в котором использовалось текучее вещество, может быть отмечен флагом для указания или предположения того, что результат исследования может быть неправильным. Альтернативно система 1700 контроля концентрации частиц в реакционном сосуде функционирует с возможностью остановки соответствующего исследования или аналитического процесса в приборе 100. В других вариантах осуществления результат оценки можно использовать для автоматической корректировки результата исследования, который может быть ошибочным из–за недостаточного объема текучего вещества.
[0684] На ФИГ. 77 представлен пример таблицы 1790 примеров пороговых значений концентрации для разных анализируемых веществ. Если измеренная концентрация частиц выходит за пределы соответствующего порогового значения, дозирование текучего вещества в реакционный сосуд считается неверным и может отмечаться флагом. Как показано, разные анализируемые вещества 1792 имеют разные пороговые значения 1794 концентрации. Например, для HBcAb желаемая концентрация 1796 частиц составляет 6,7 мг/мл, а пороговое значение 1794 концентрации равно или более 85%. Таким образом, если концентрация частиц в HBcAb равна или составляет более 85% от 6,7 мг/мл (приблизительно 5,695 мг/мл), то реакционный сосуд считается приемлемым для исследования.
[0685] Как показано на ФИГ. 78 и 79, операции и функции системы 1700 контроля концентрации частиц в реакционном сосуде также можно использовать в составе диагностической функции, в которой частицы без связанного вещества можно использовать для генерализации функции отделения несвязавшегося вещества и обнаружения сбоев системы. В частности, на ФИГ. 78 представлена функциональная схема примера диагностического способа 1800. Способ 1800 включает в себя операцию 1802, во время которой создаются калибровочные данные, а также операцию 1804, во время которой выполняют диагностическое исследование. На ФИГ. 79 дополнительно проиллюстрирован способ 1800. В некоторых вариантах осуществления операция 1802 способа 1800 включает в себя операции 1810, 1812, 1814, 1816 и 1820, а операция 1804 включает в себя операции 1820, 1822, 1824, 1826 и 1830. Эти операции выполняются идентично или аналогично операциям, выполняемым системой 1700 контроля концентрации частиц в реакционном сосуде, как описано выше. Таким образом, операции в способе 1800 описаны вкратце для краткости изложения.
[0686] Для выполнения операции 1802 представляющие интерес частицы дозируют в сосуд (операция 1810). Затем в сосуд дозируют буферный раствор (операция 1812) и сосуд подвергают перемешиванию (операция 1814). После этого захватывают изображение сосуда после перемещения сосуда в блок захвата изображения (операция 1816). Захваченное изображение анализируют для получения калибровочных данных (операция 1818).
[0687] Для выполнения операции 1804 представляющие интерес частицы дозируют в сосуд (операция 1820). Затем в сосуд дозируют буферный раствор (операция 1822) и сосуд подвергают перемешиванию (операция 1824). После этого захватывают изображение сосуда после перемещения сосуда в блок захвата изображения (операция 1826). Захваченное изображение анализируют для измерения концентрации частиц на основании калибровочных данных (операция 1828). Полученную концентрацию частиц можно использовать для выполнения диагностической функции.
[0688] Различные варианты осуществления, описанные выше, приведены только в качестве иллюстрации и не должны толковаться как ограничивающие пункты формулы изобретения, приложенные к настоящему документу. Специалистам в данной области будут хорошо понятны различные модификации и изменения, которые могут быть внесены вне рамок примеров осуществления и областей применения, проиллюстрированных и описанных в настоящем документе, но без отступления от фактической сущности и объема представленных ниже пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТБОРА И ДОЗИРОВАНИЯ ОБРАЗЦОВ | 2009 |
|
RU2509533C2 |
| ОПРЕДЕЛЕНИЕ СОСТОЯНИЙ В ЦЕНТРИФУГИРОВАННОЙ КРОВИ ПО ИЗМЕРЕННОМУ ДАВЛЕНИЮ | 2012 |
|
RU2611384C2 |
| АВТОМАТИЧЕСКИЙ АНАЛИЗАТОР | 2020 |
|
RU2781440C1 |
| РЕАКЦИОННЫЙ СОСУД ДЛЯ АВТОМАТИЧЕСКОГО АНАЛИЗАТОРА | 2019 |
|
RU2772562C1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ПОЛУЧЕНИЯ И ПРИГОТОВЛЕНИЯ ОБРАЗЦА МИКРООРГАНИЗМА КАК ДЛЯ ИДЕНТИФИКАЦИИ, ТАК И ДЛЯ ТЕСТОВ НА ЧУВСТВИТЕЛЬНОСТЬ К АНТИБИОТИКАМ | 2016 |
|
RU2718086C2 |
| УСТАНОВКА ДЛЯ ПОДАЧИ ТЕКУЧЕЙ СРЕДЫ И ОТНОСЯЩИЕСЯ К НЕЙ СПОСОБЫ | 2007 |
|
RU2470853C2 |
| Катетер для абляции биологической ткани | 2019 |
|
RU2816632C2 |
| БЛОК НОСИТЕЛЯ РЕАГЕНТОВ, АДАПТЕР И СПОСОБ МАНИПУЛЯЦИИ БЛОКОМ НОСИТЕЛЯ РЕАГЕНТОВ | 2015 |
|
RU2682097C2 |
| СИСТЕМЫ И МЕТОДЫ ОПТИМИЗАЦИИ ИСПОЛЬЗОВАНИЯ ОБРАЗЦА | 2012 |
|
RU2620922C2 |
| КОМПОЗИЦИИ И СПОСОБЫ ОБНАРУЖЕНИЯ И АНАЛИЗА МИКОБАКТЕРИИ ТУБЕРКУЛЕЗА (MYCOBACTERIUM TUBERCULOSIS) | 2015 |
|
RU2697502C2 |
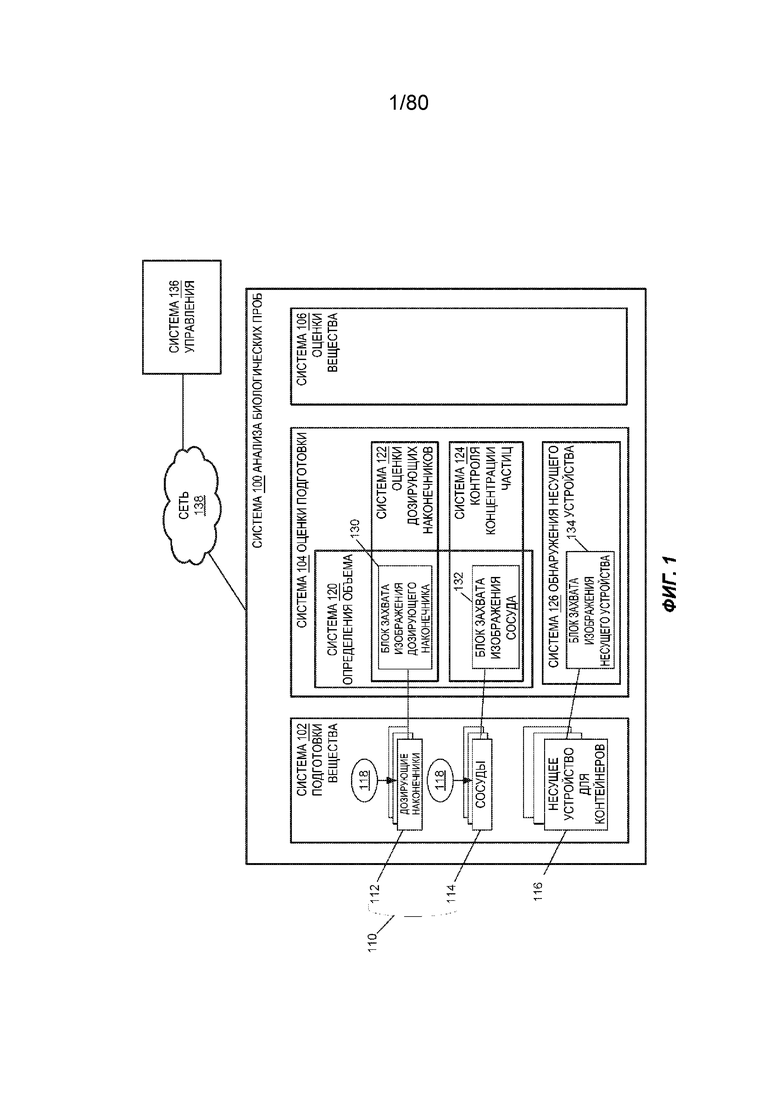
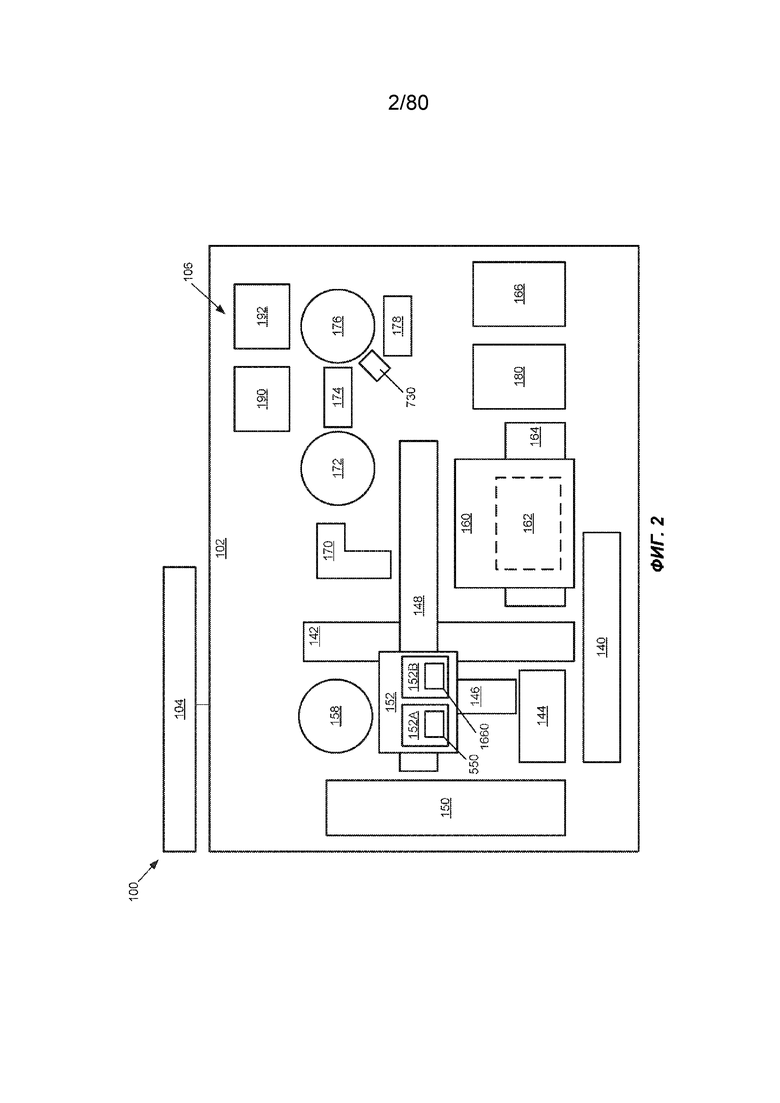
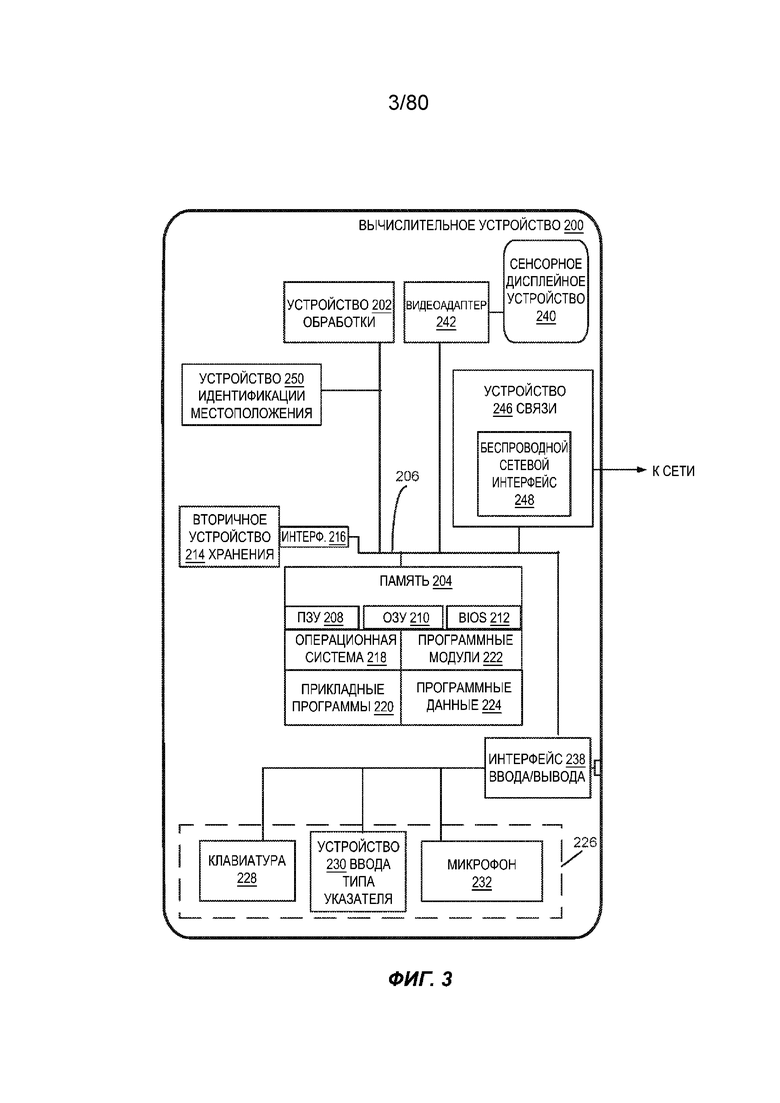
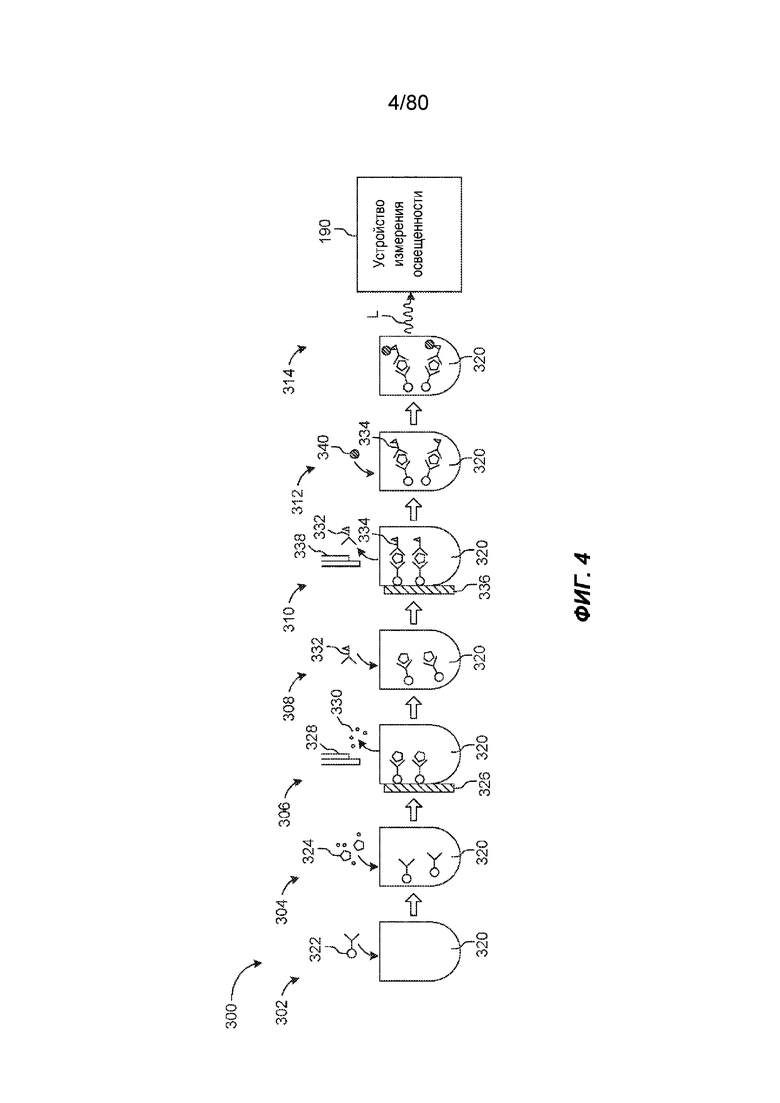
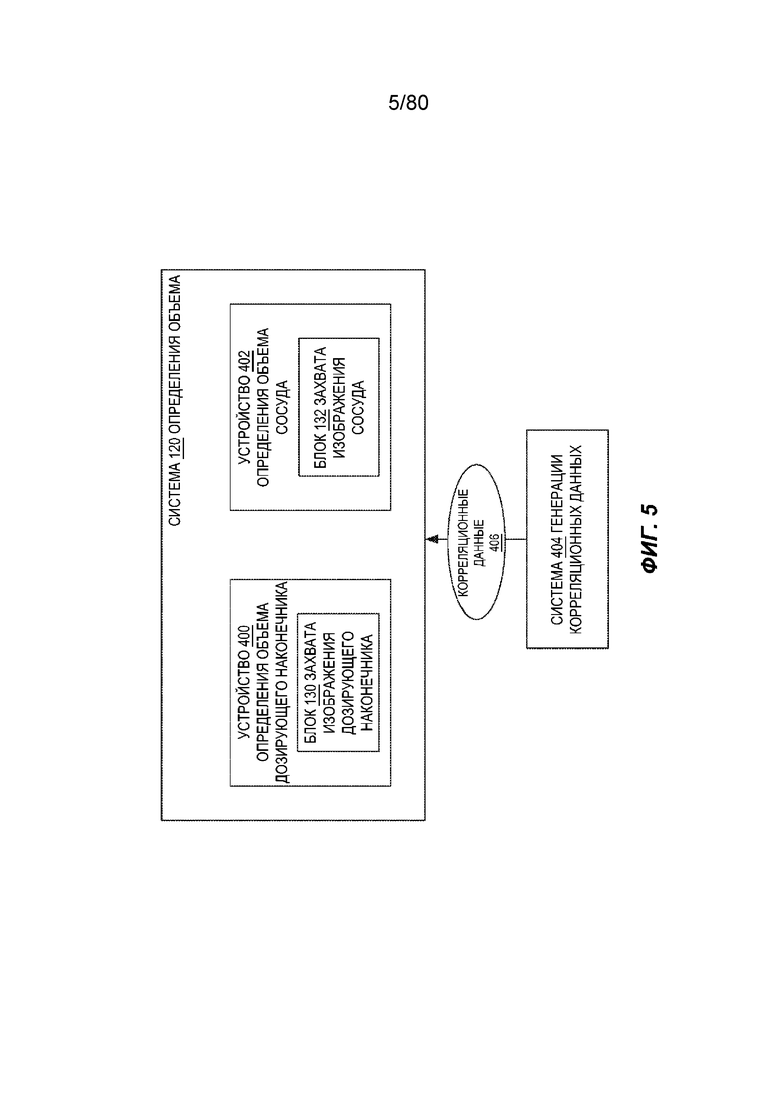
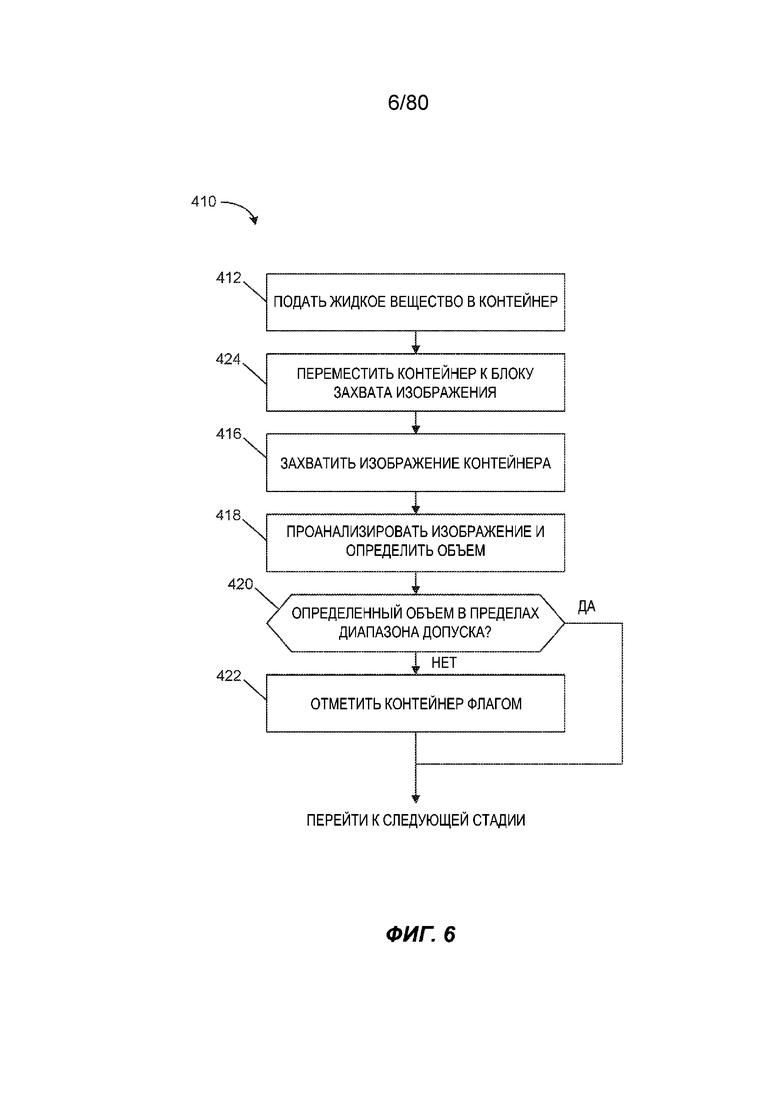
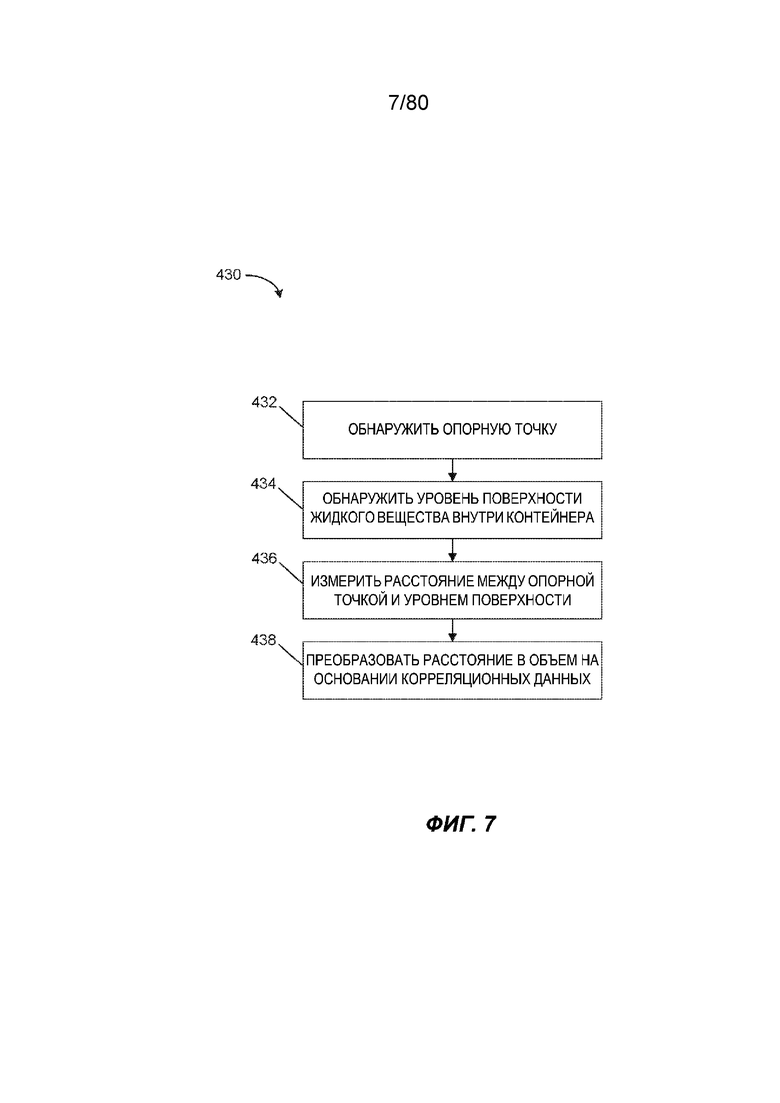
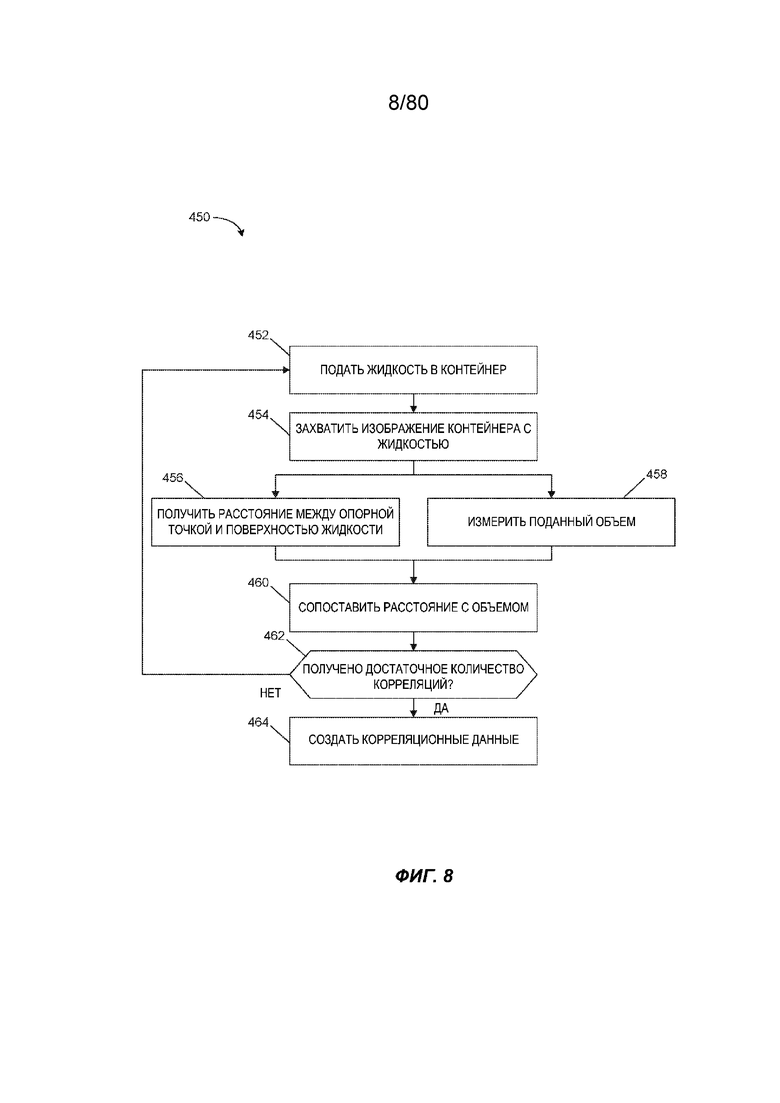
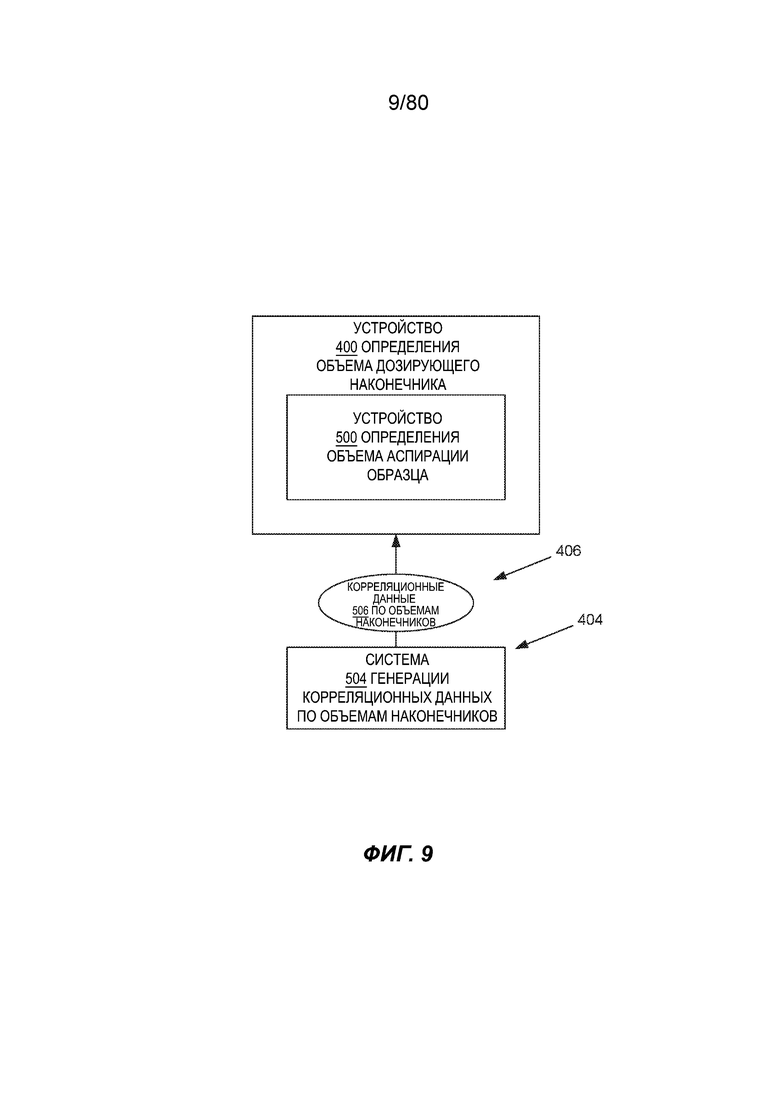
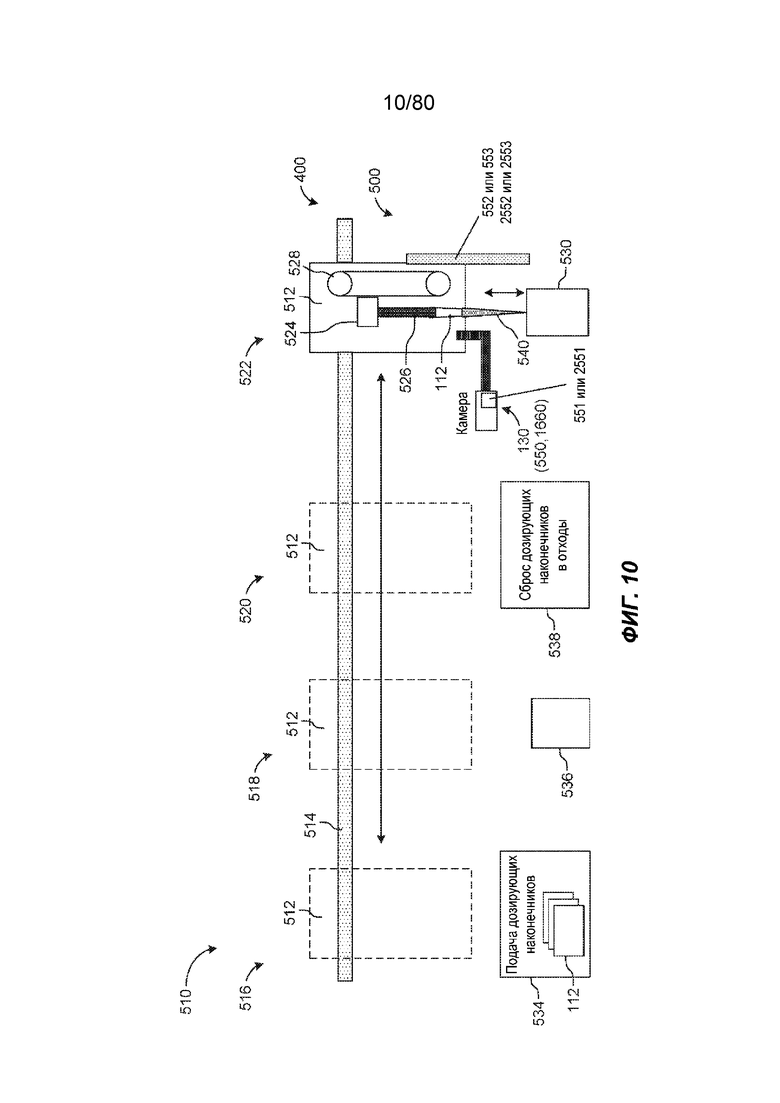
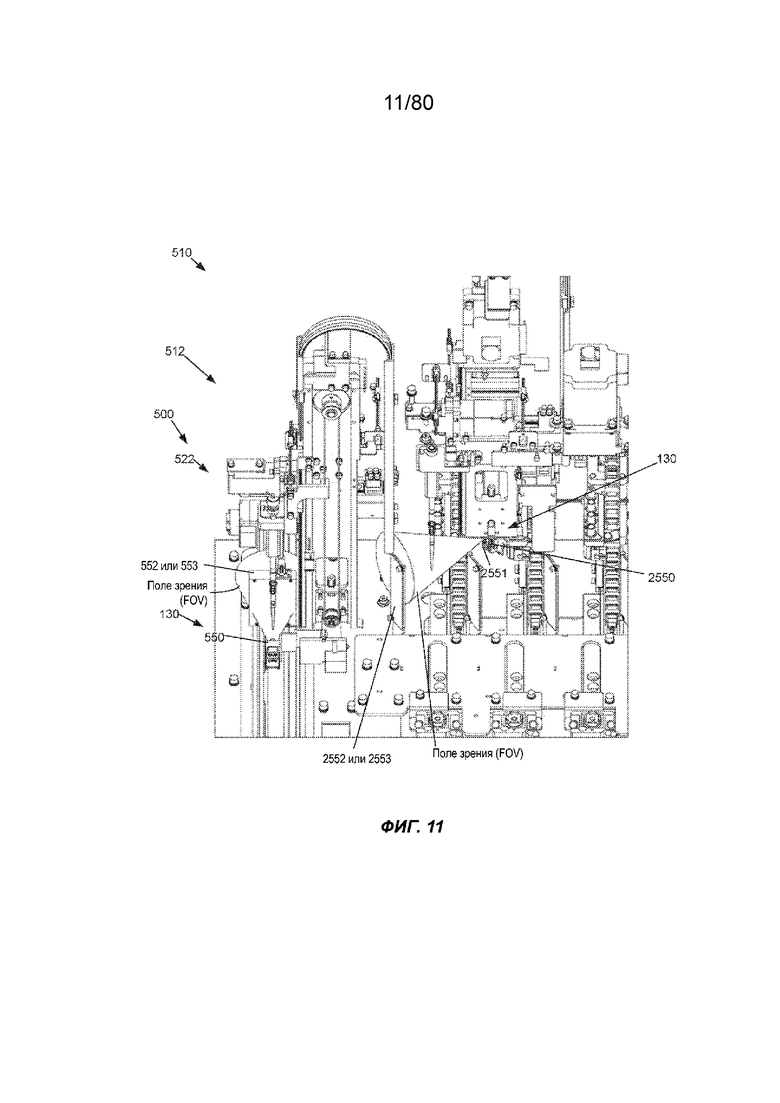
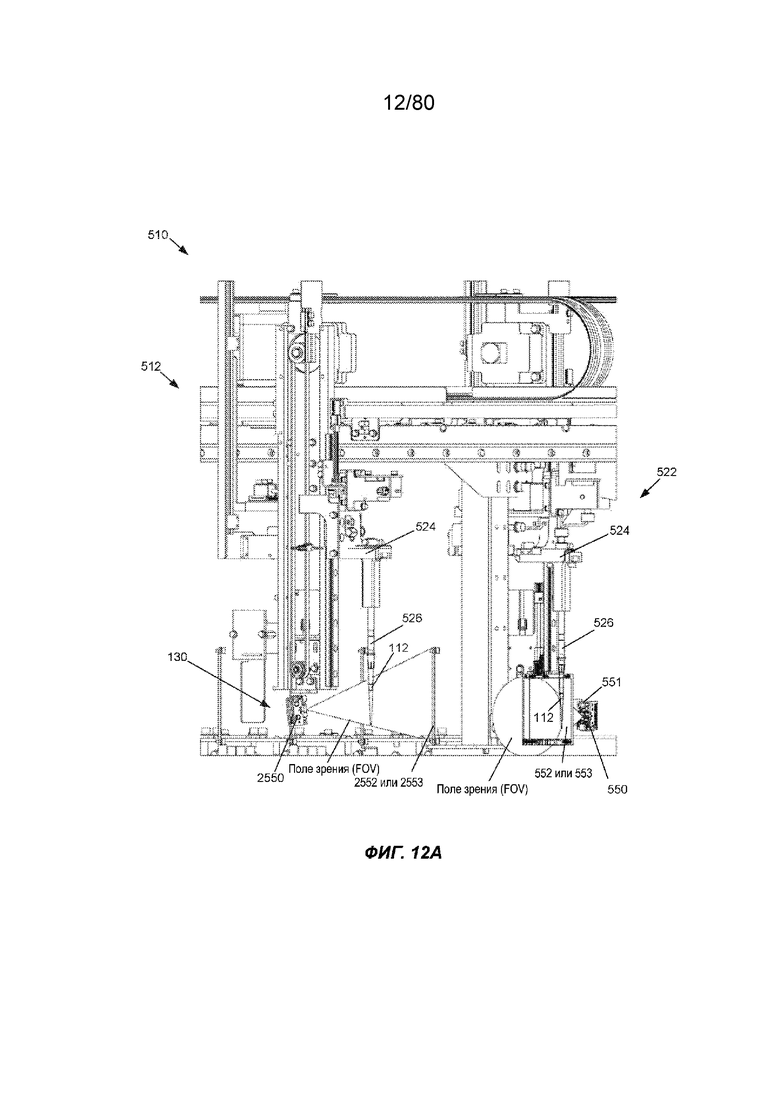
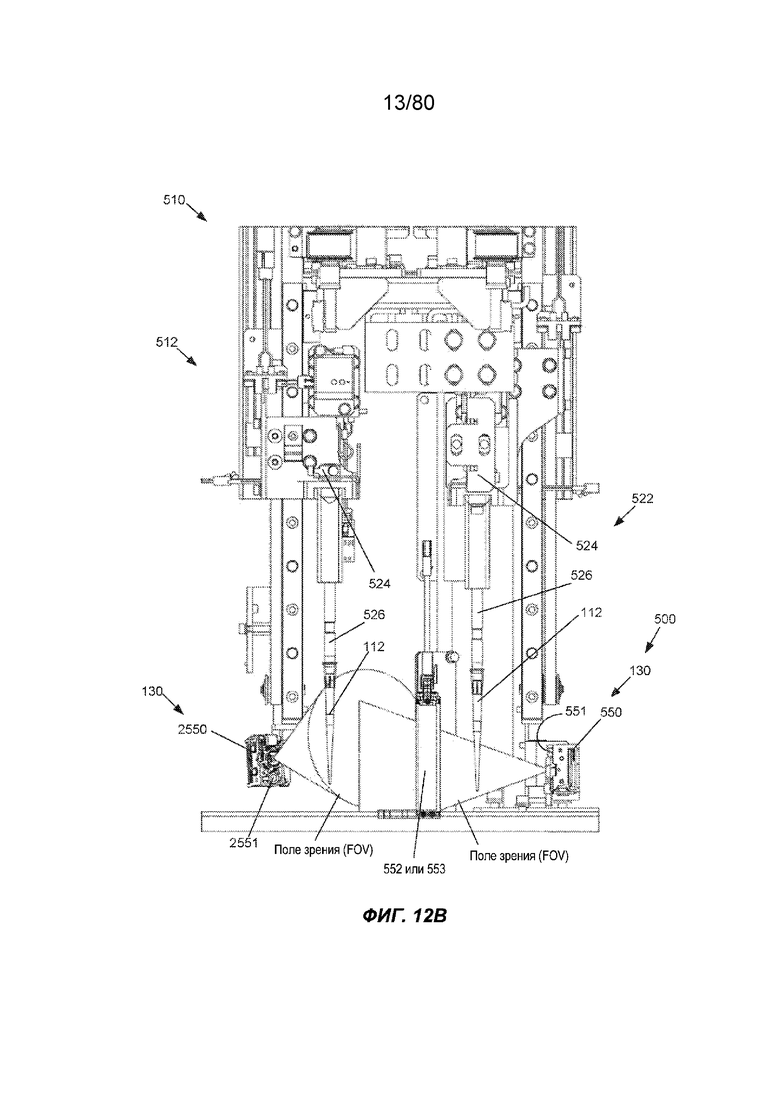
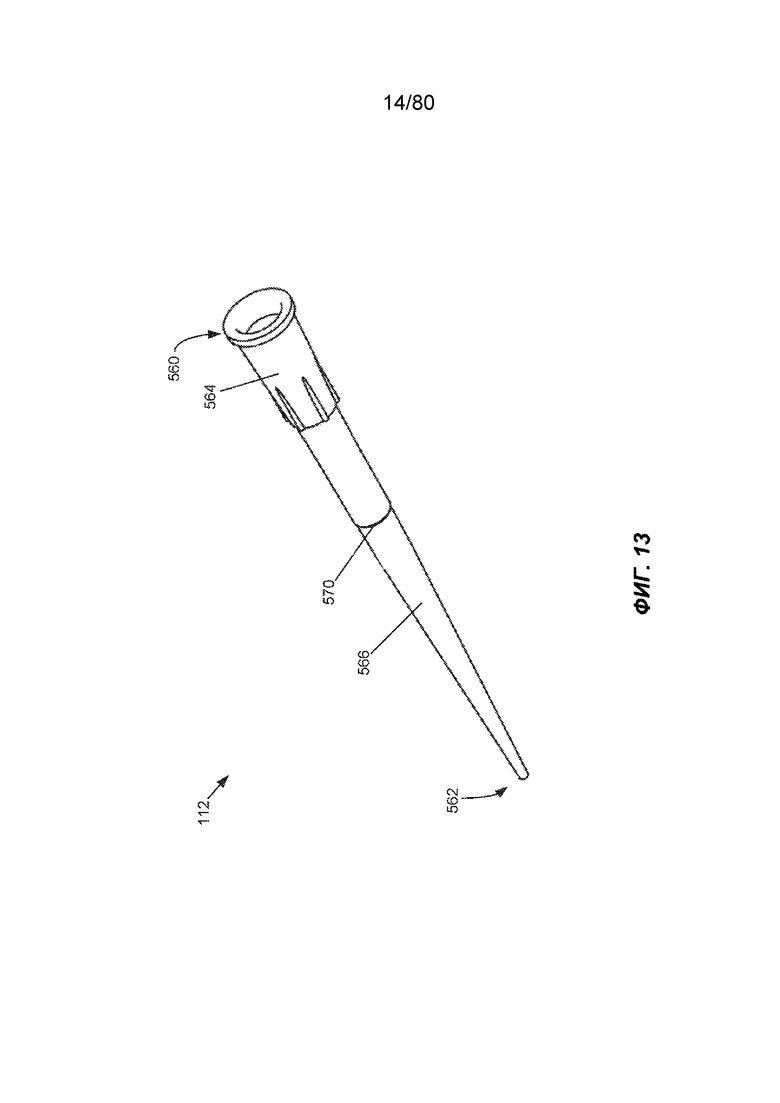
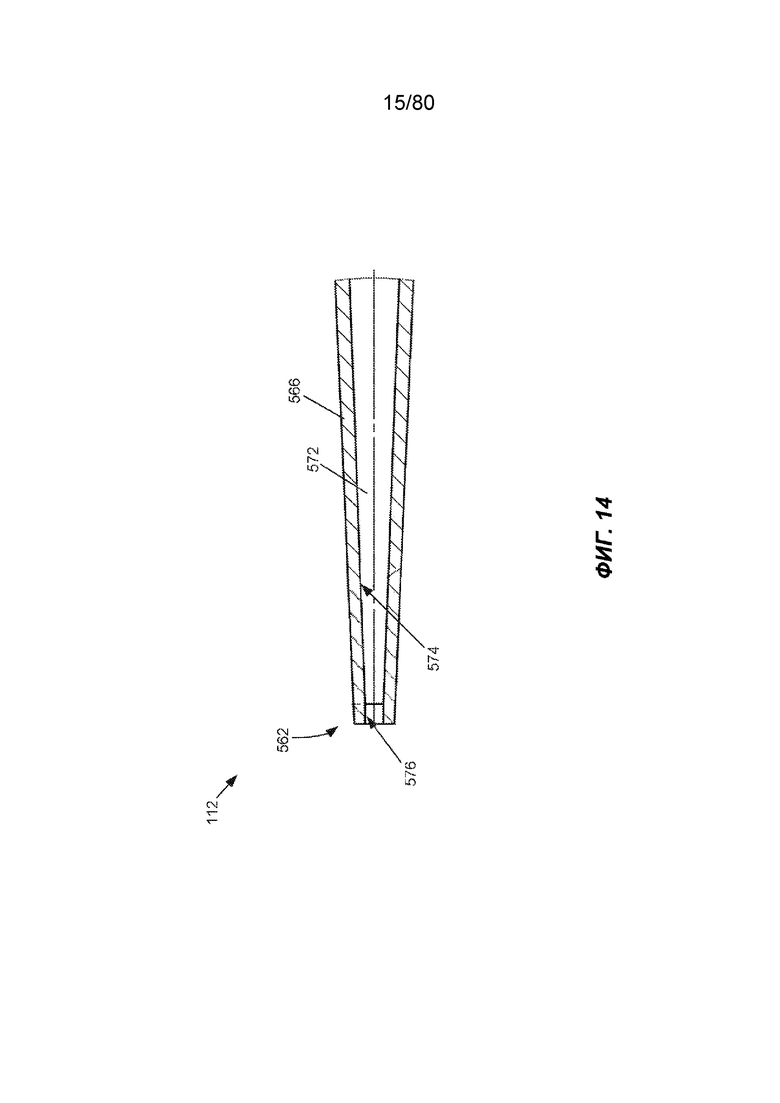
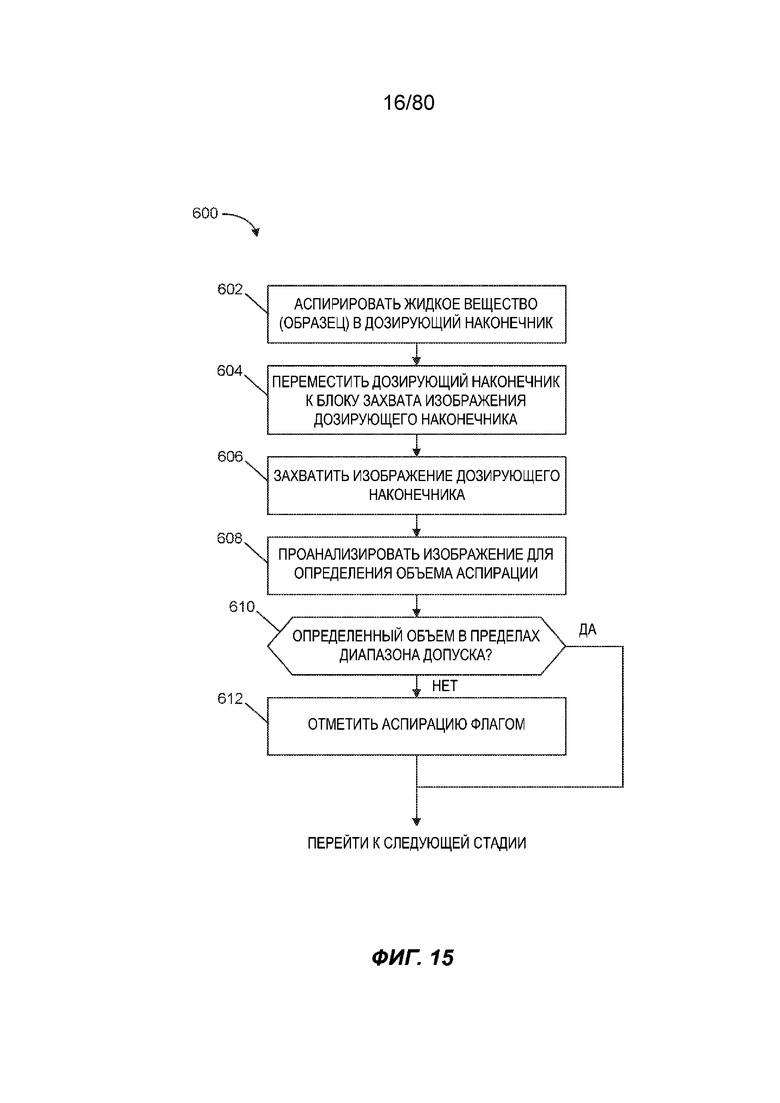
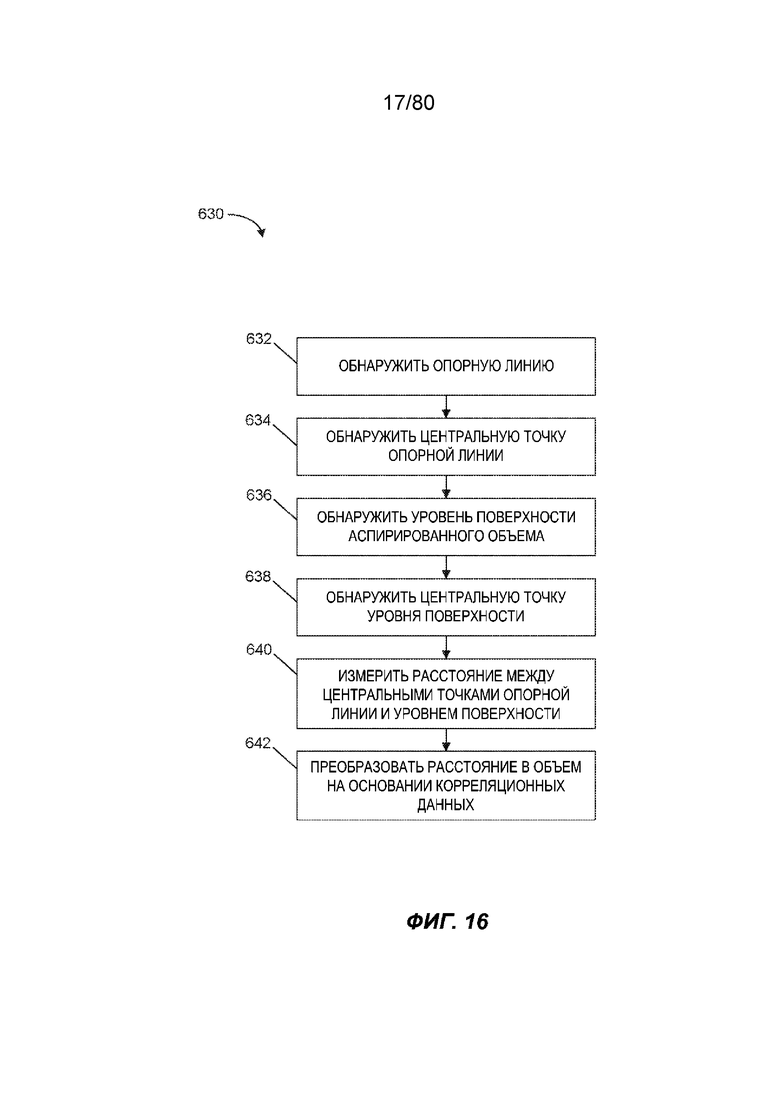
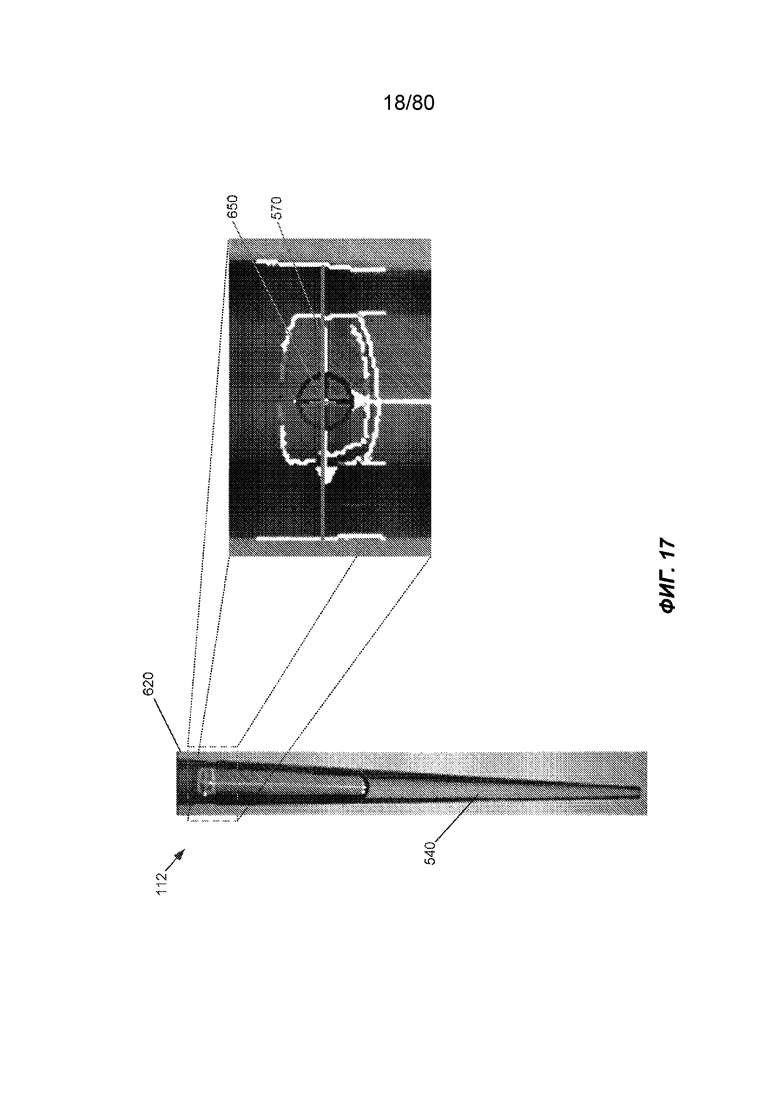
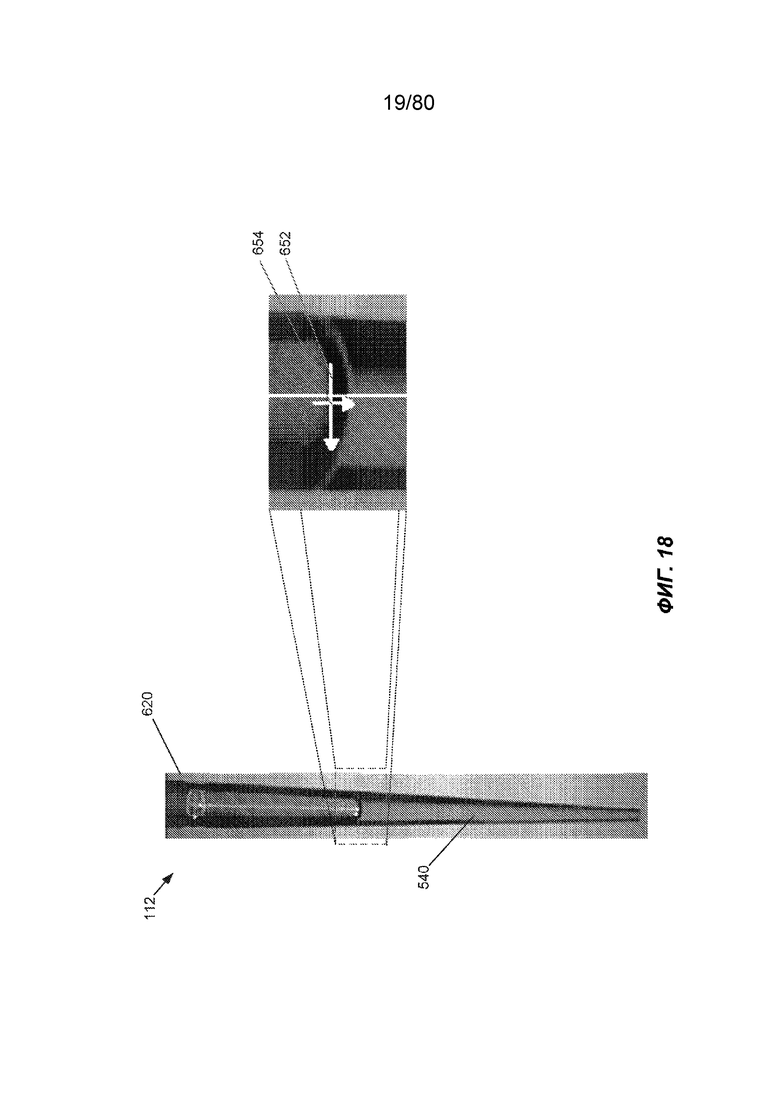
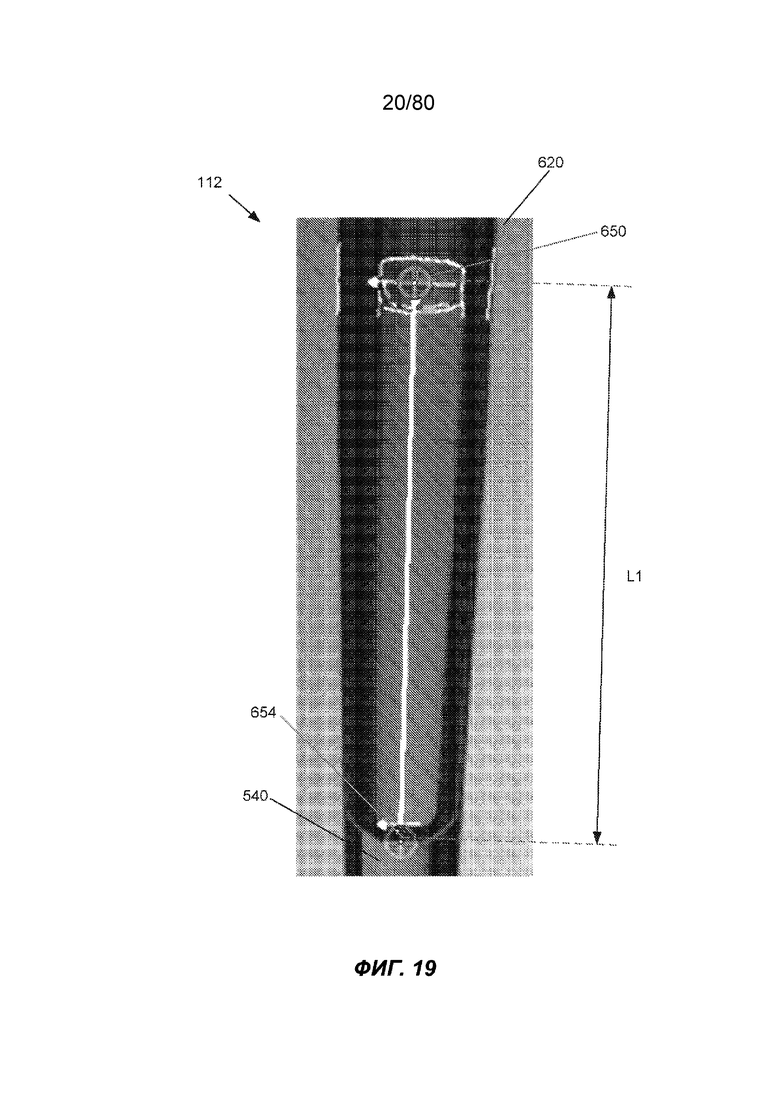
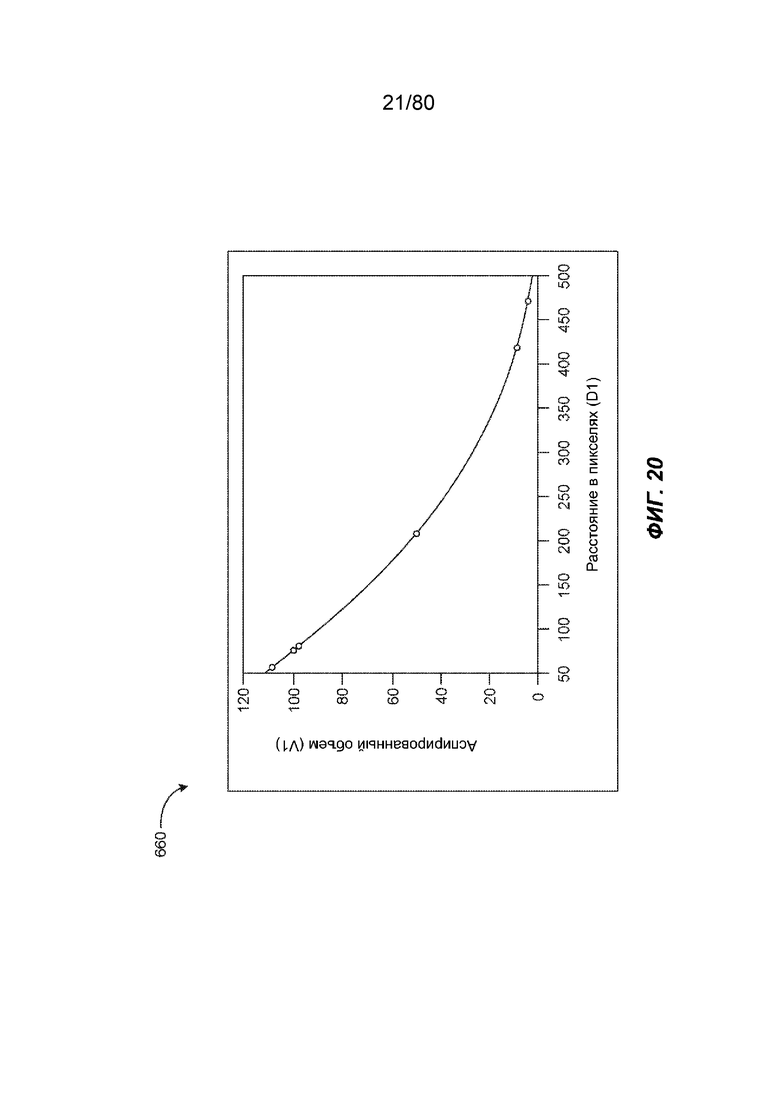
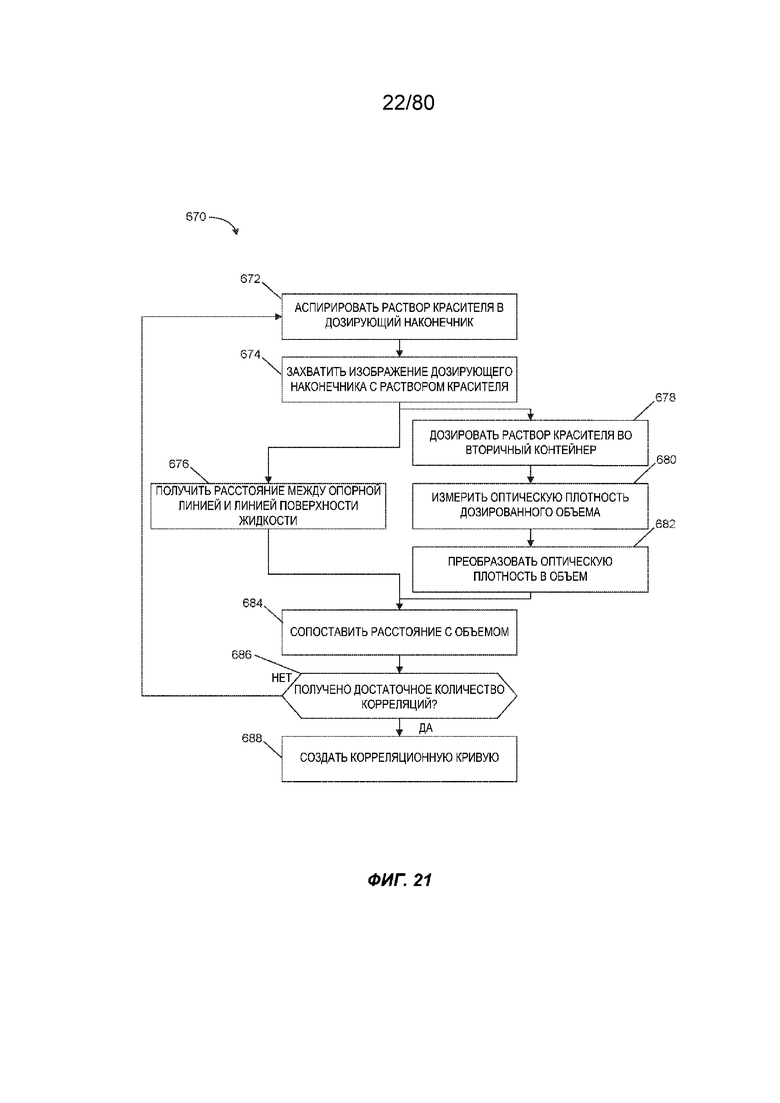
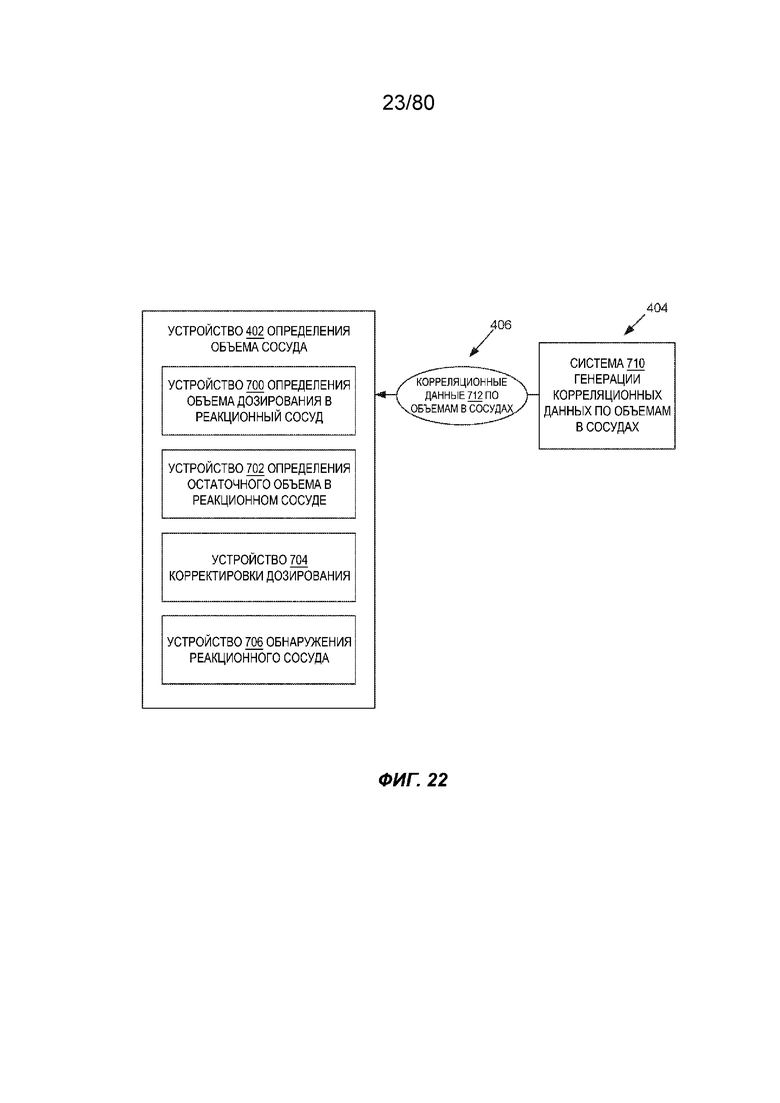
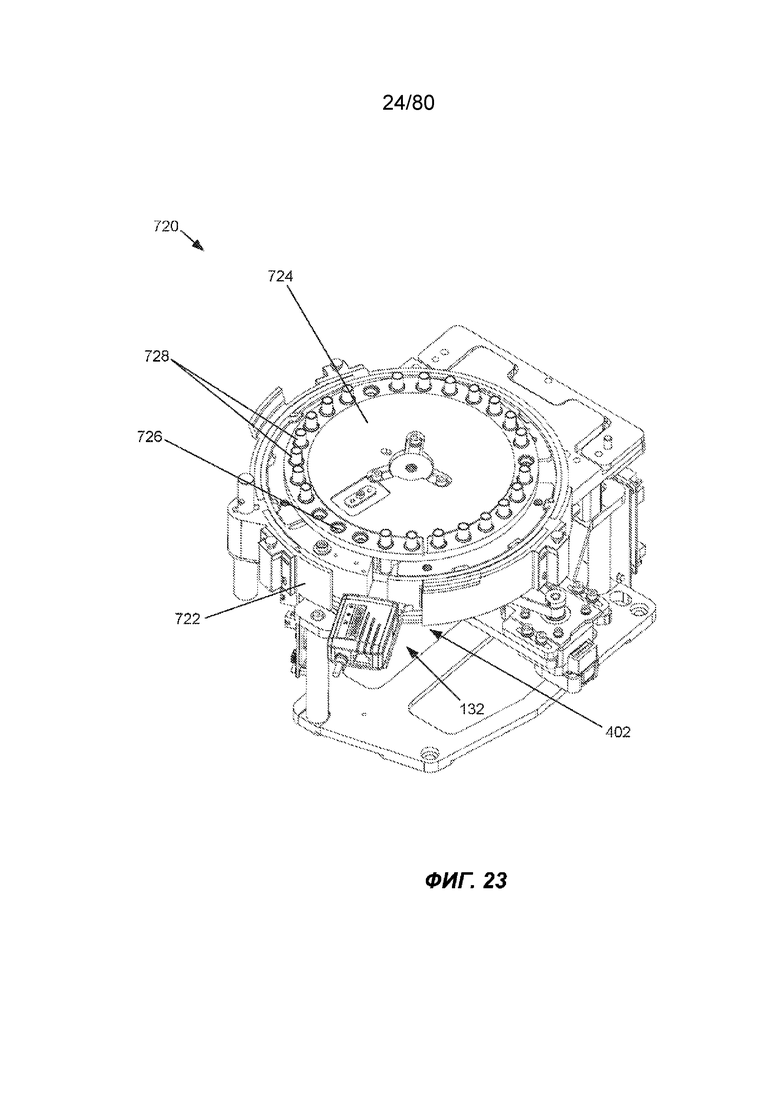
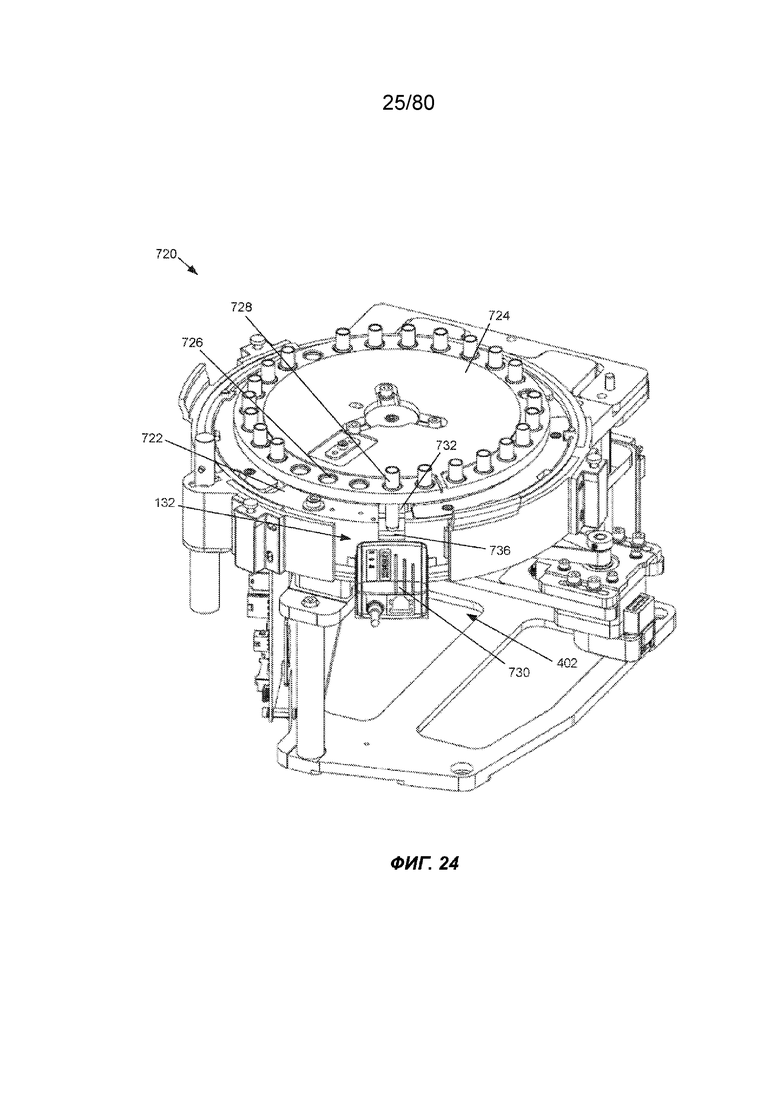
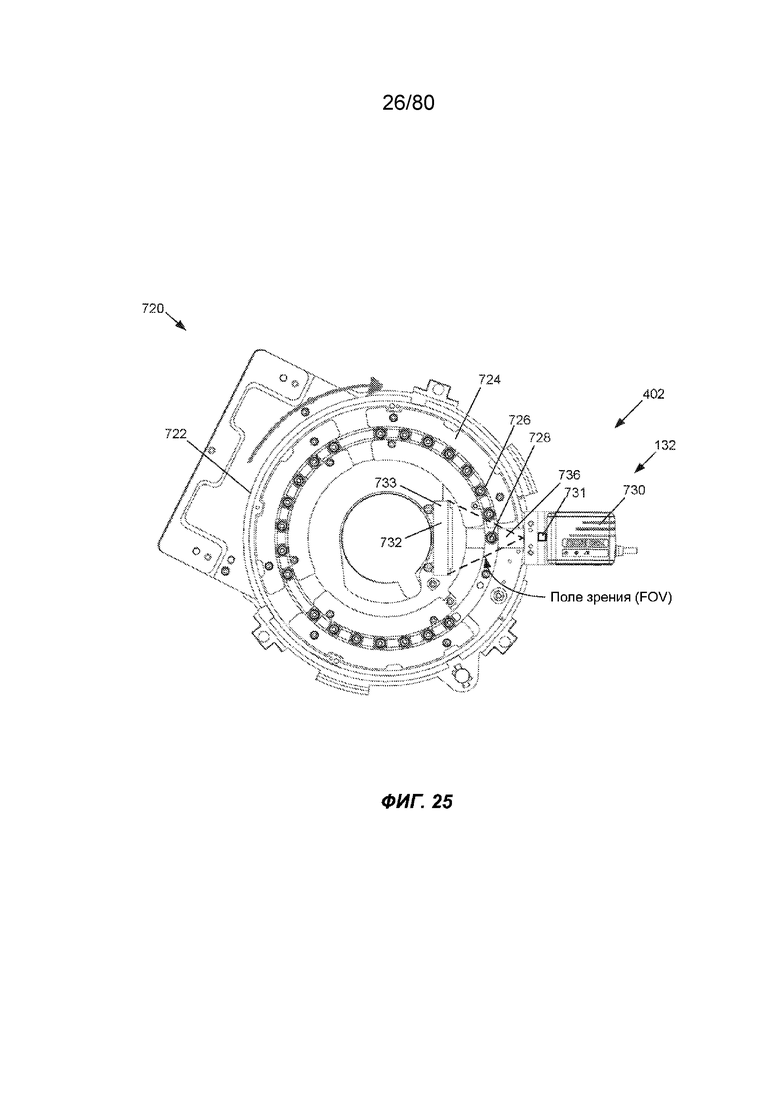
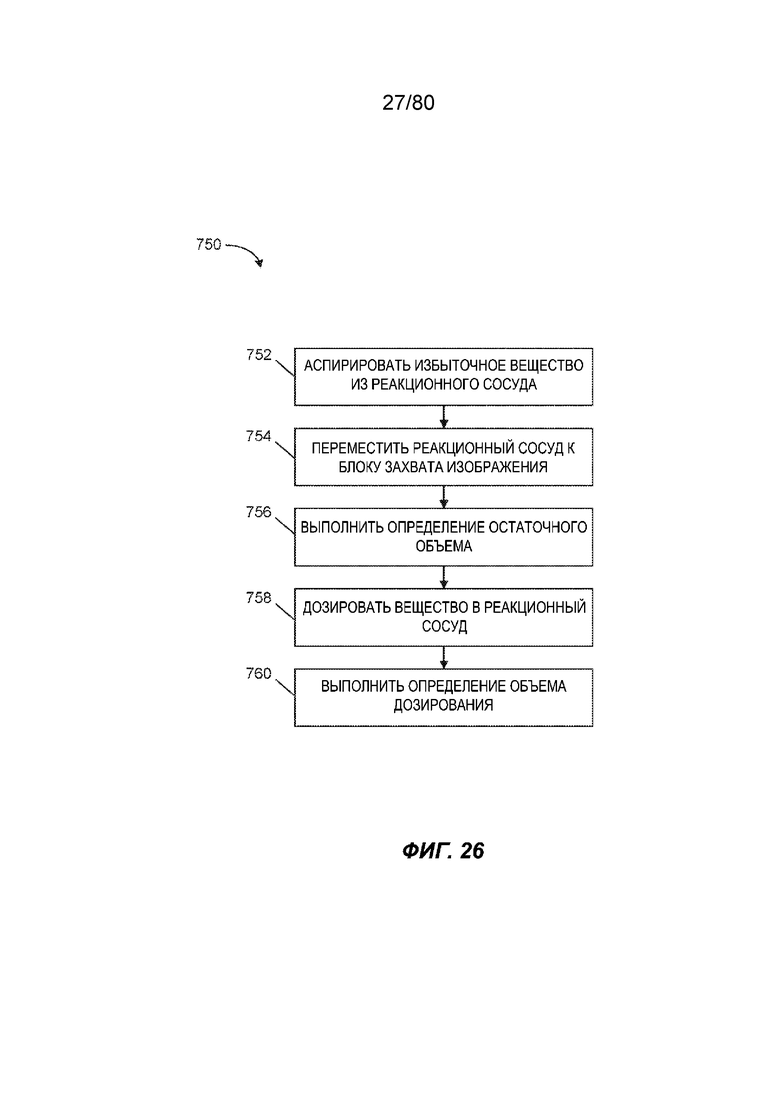
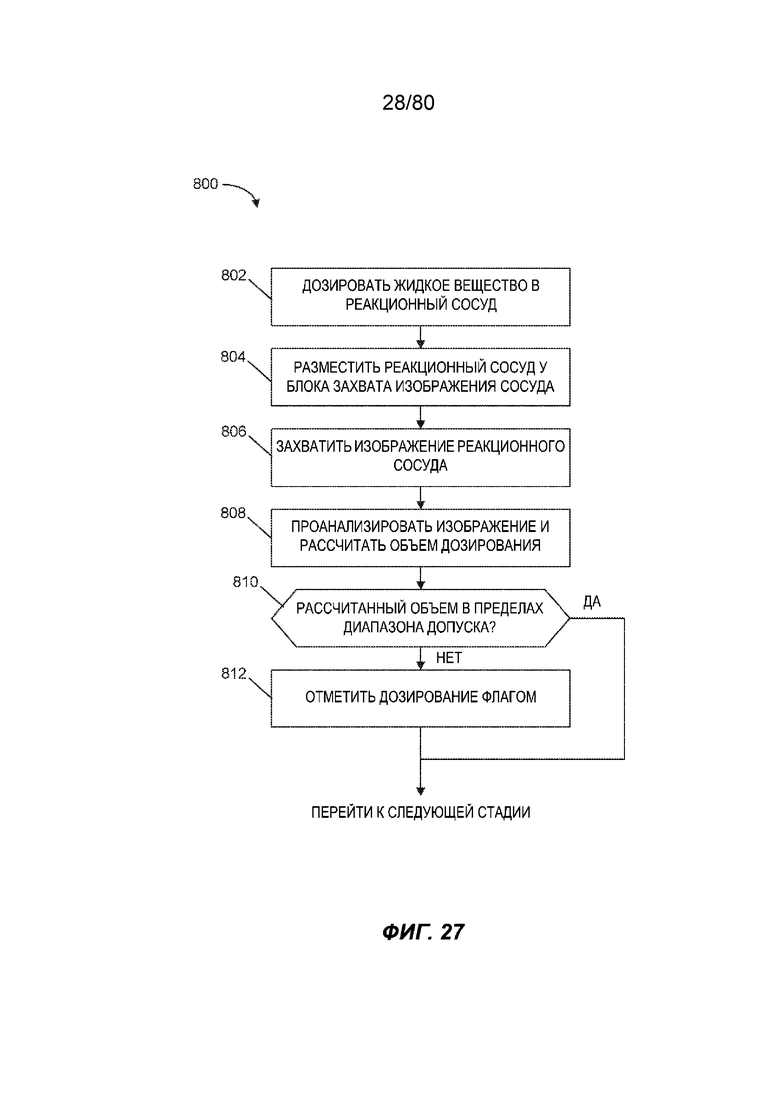
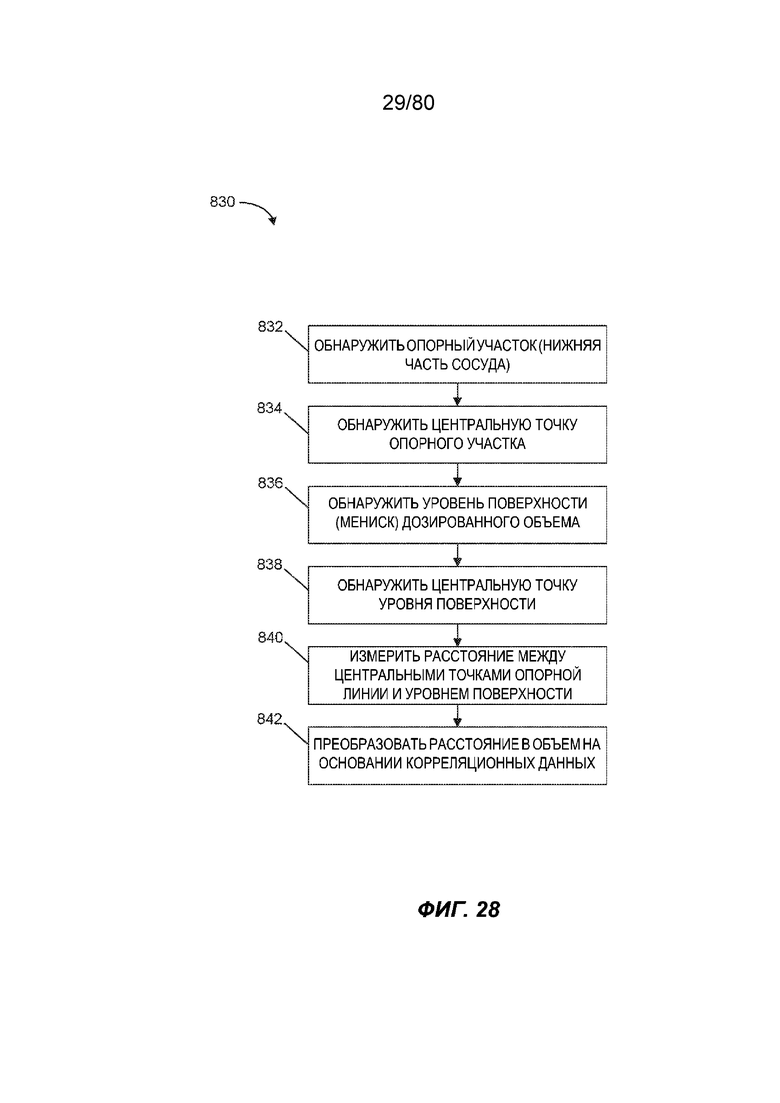
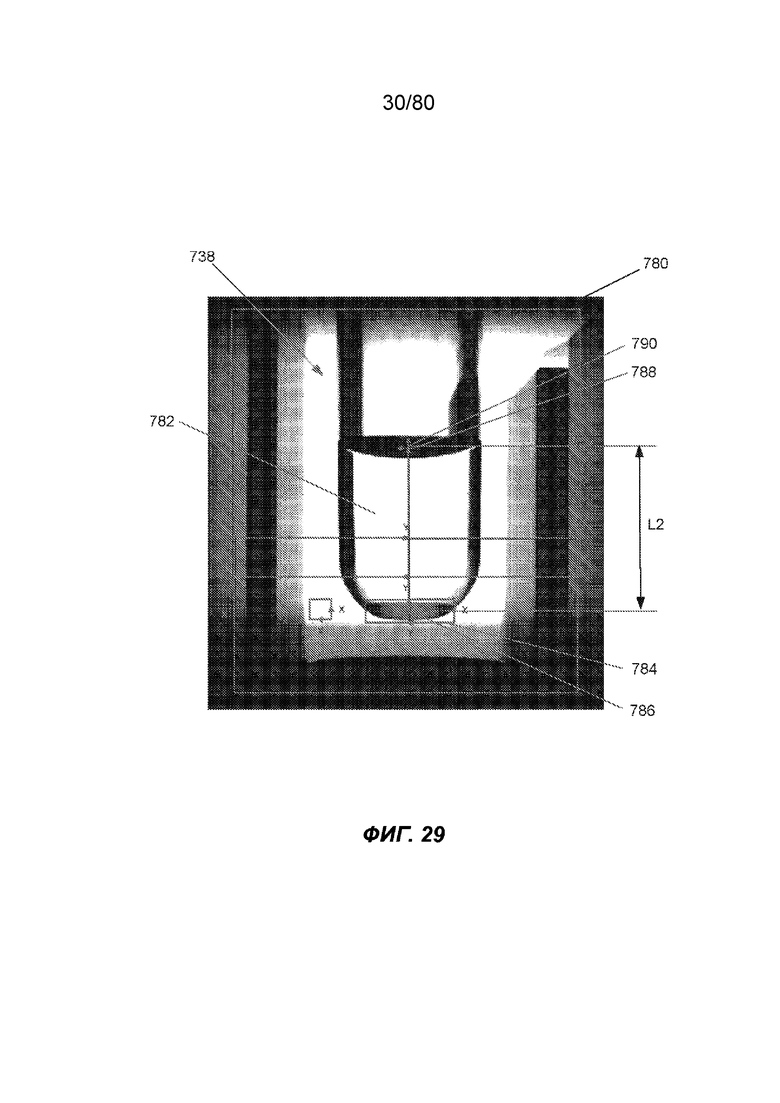
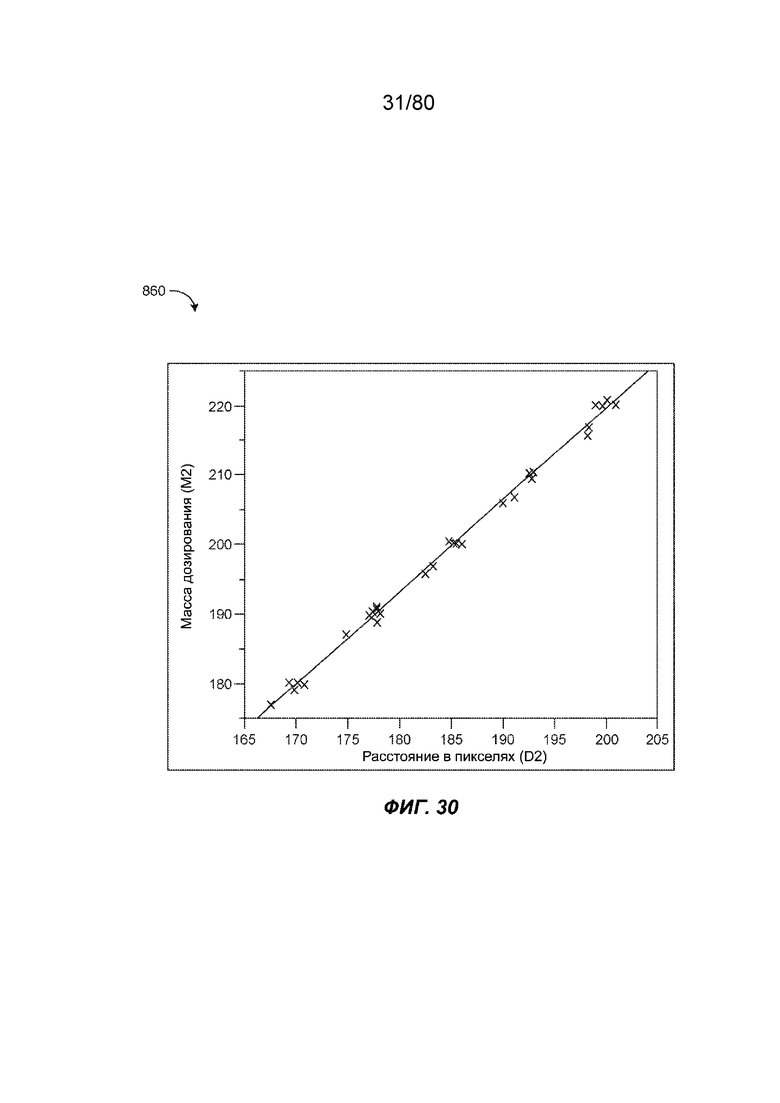
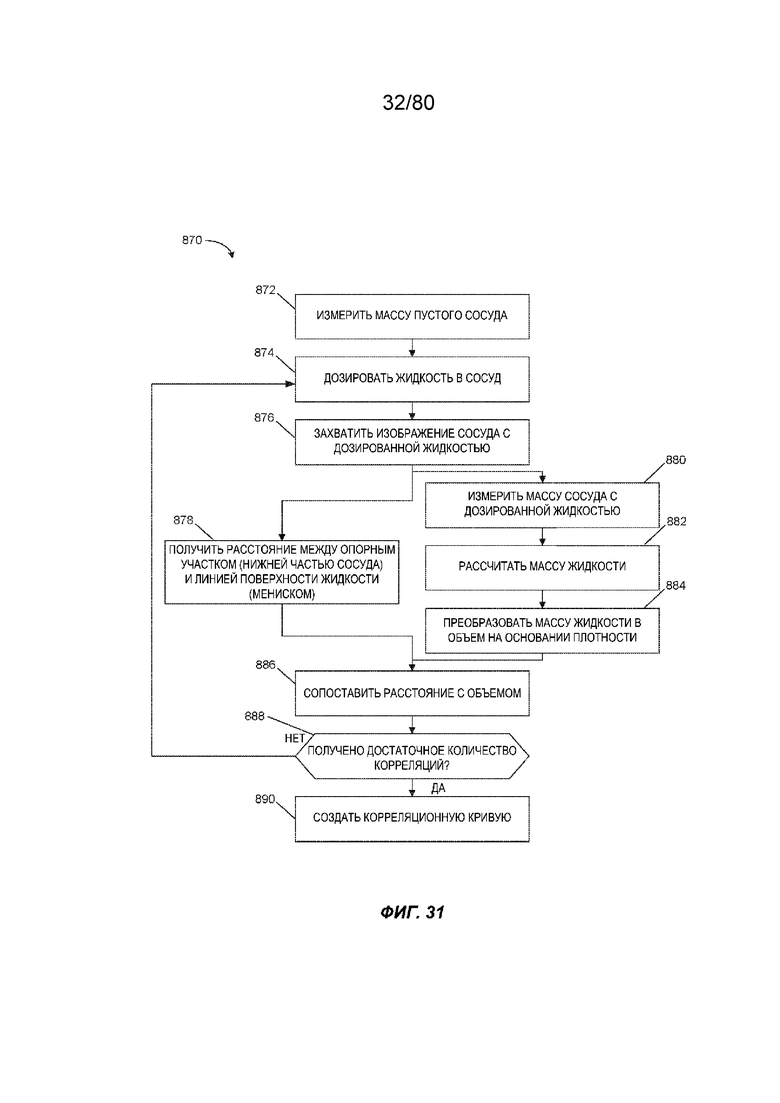
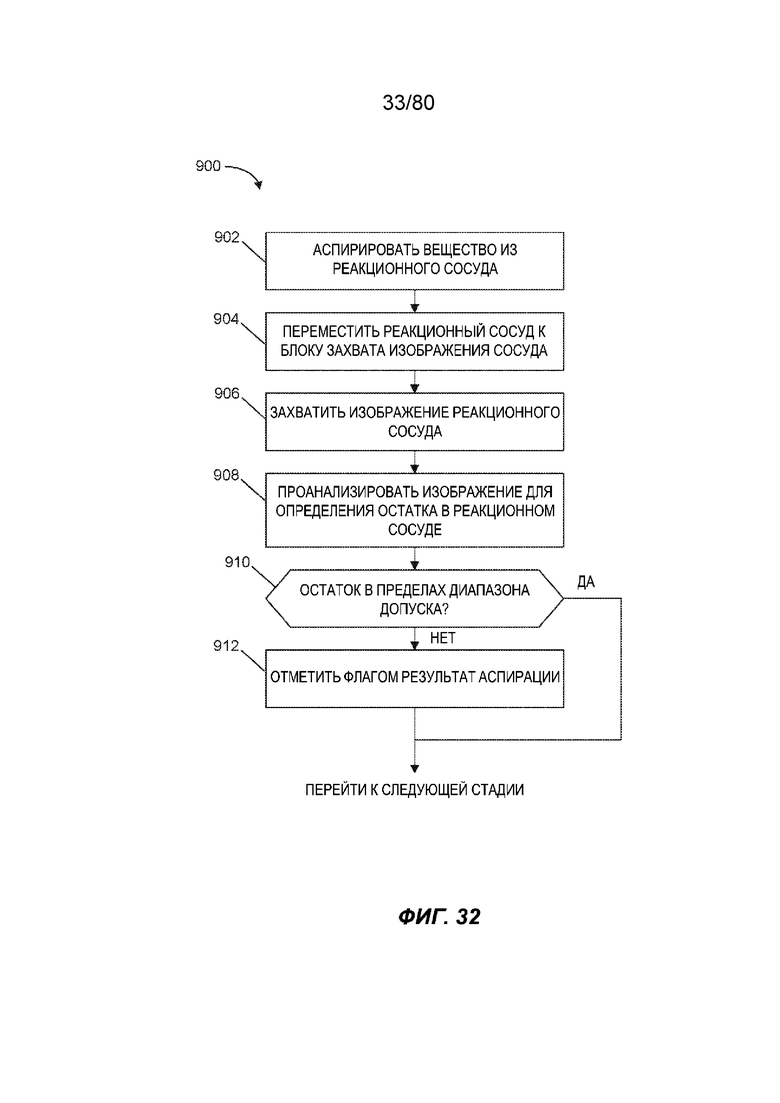
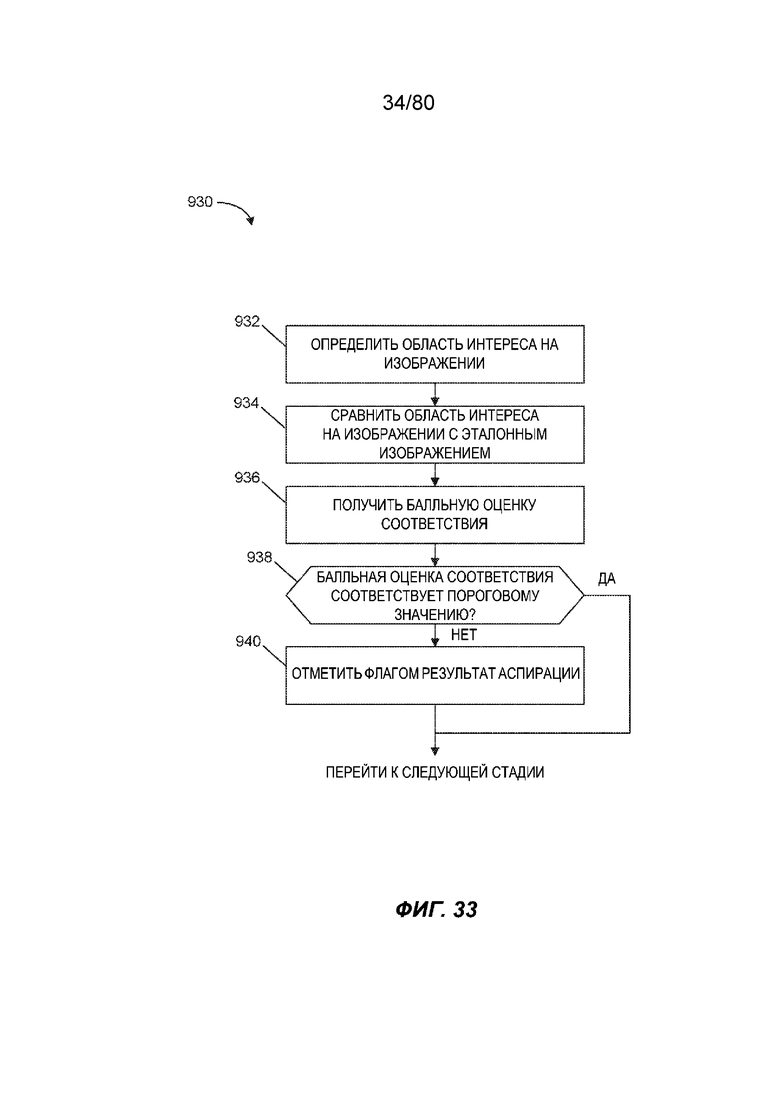
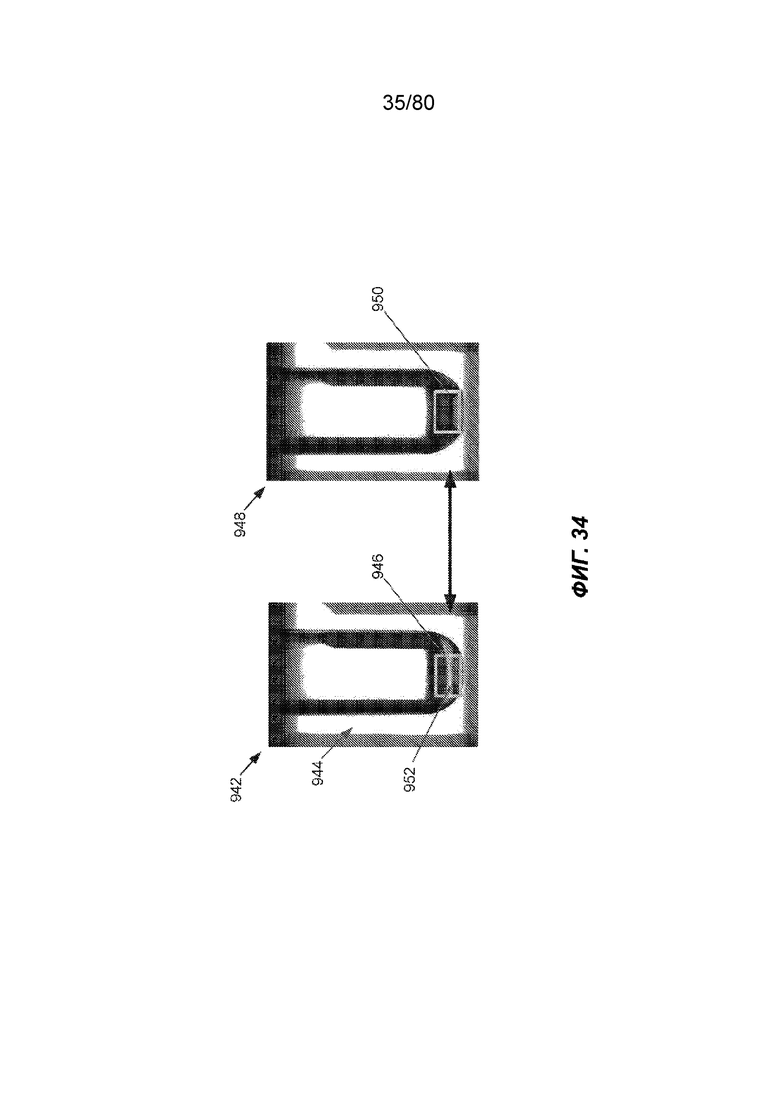
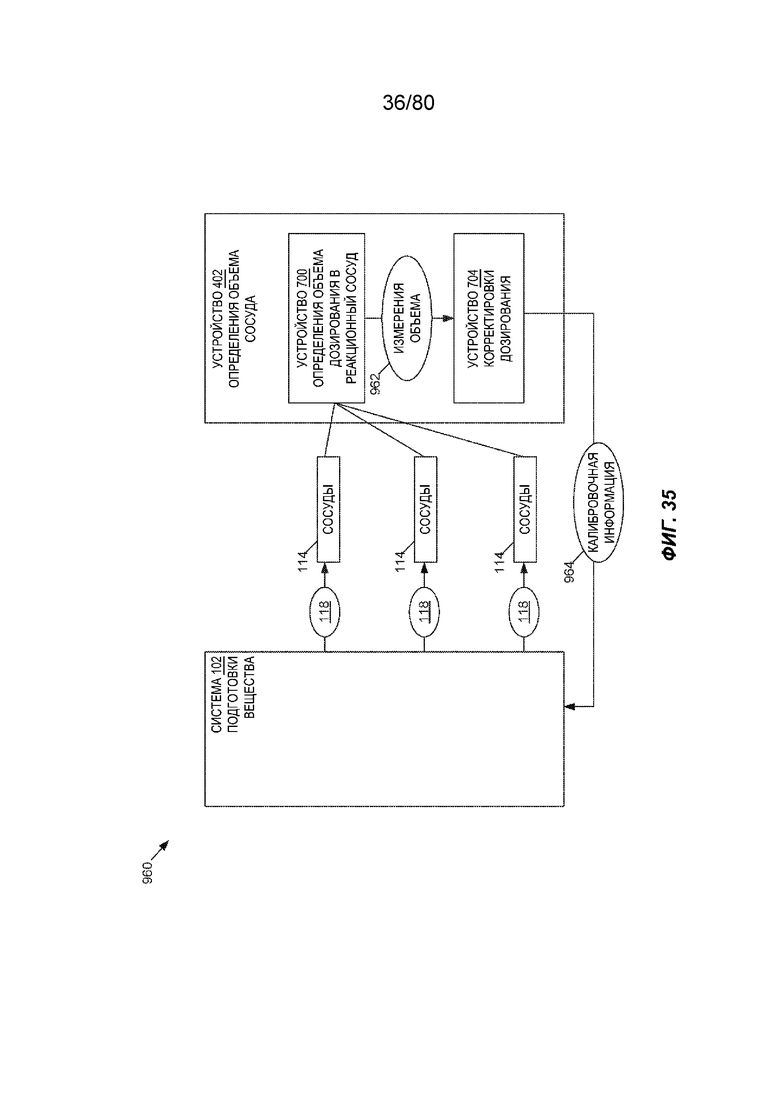
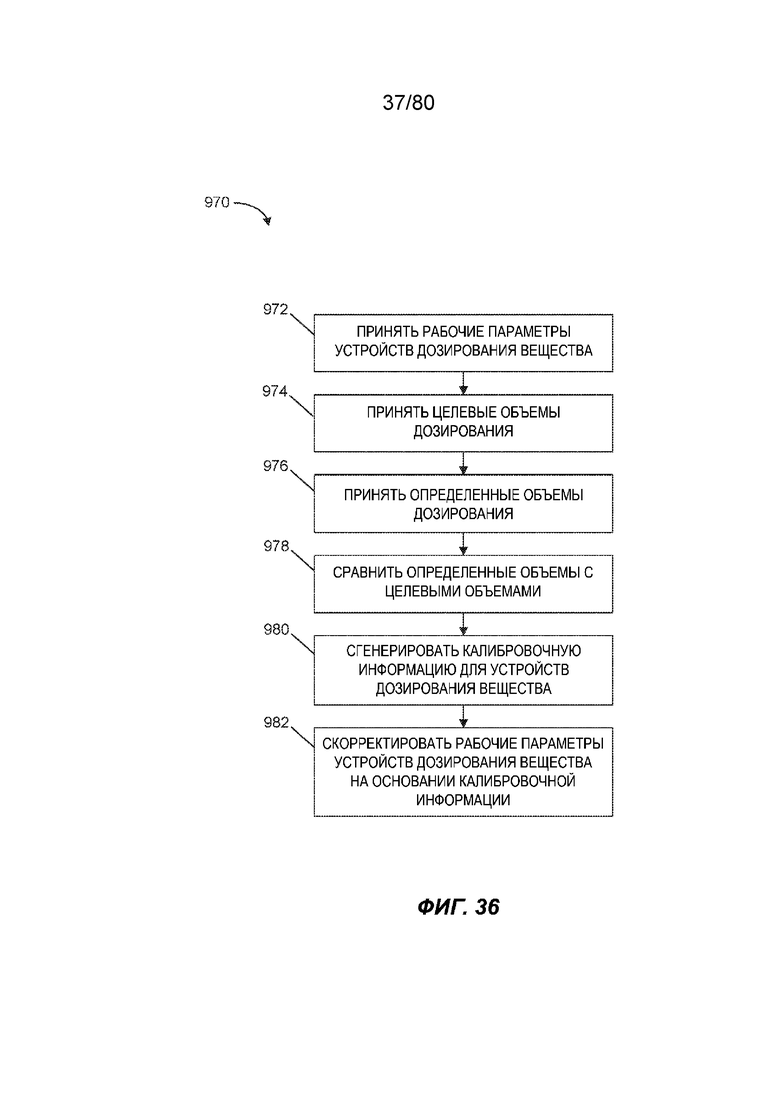
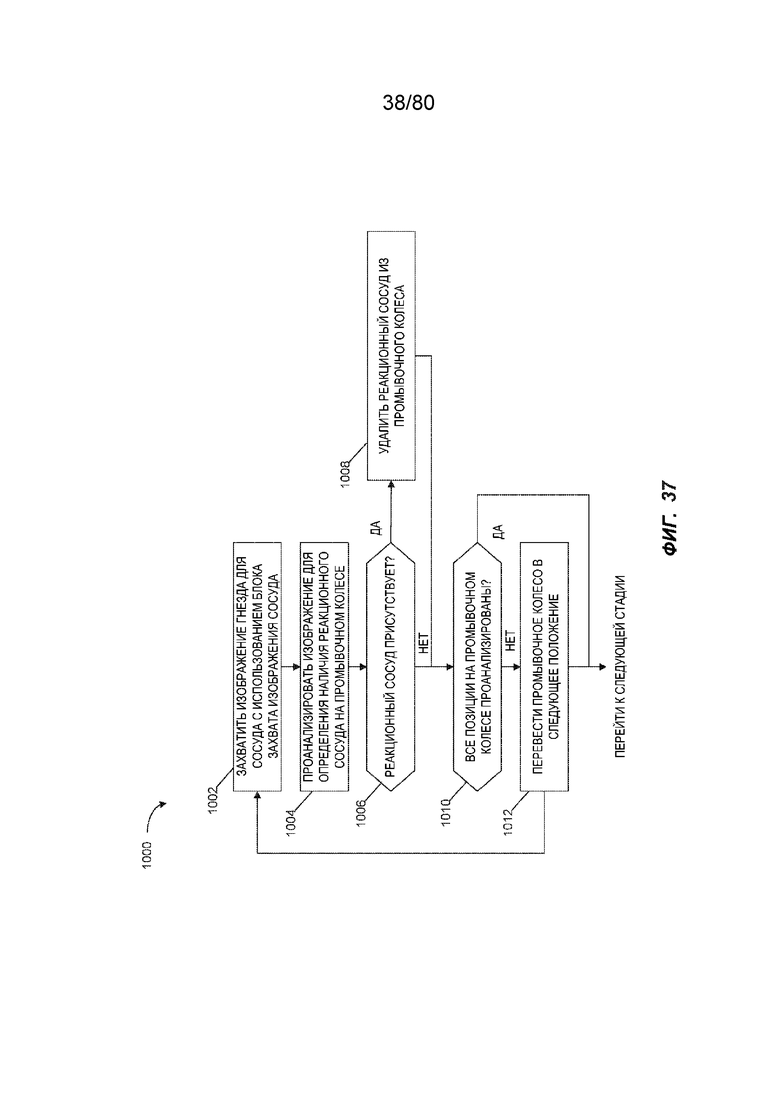
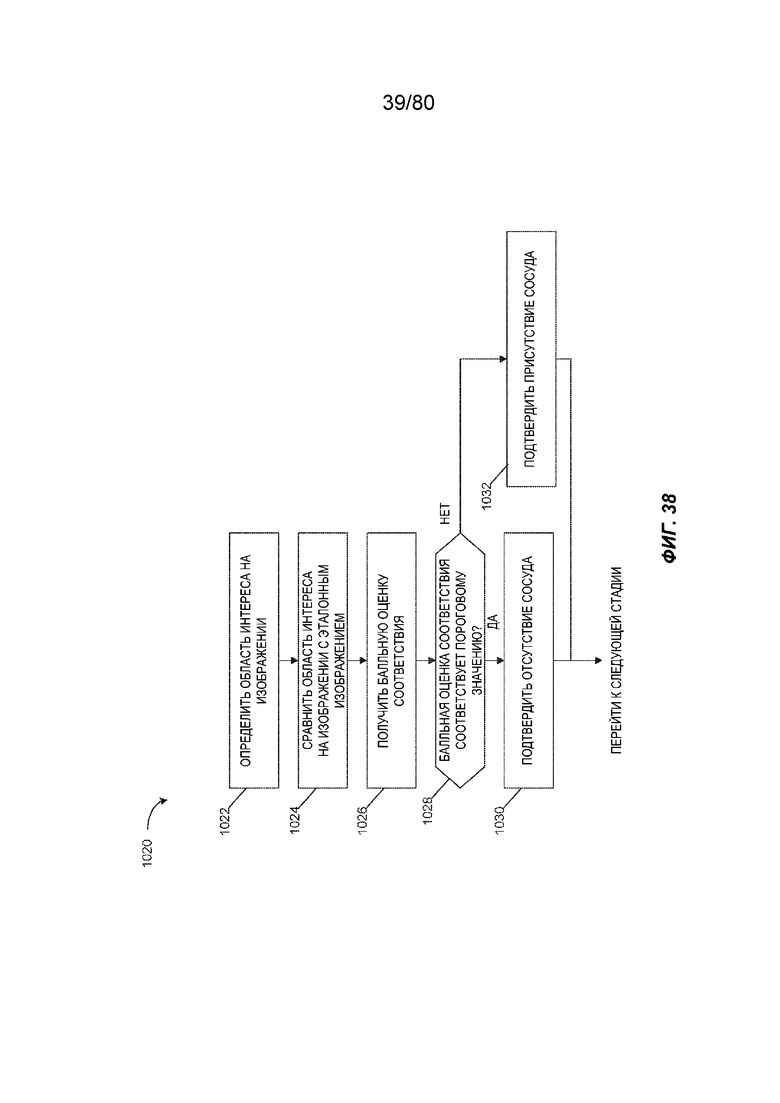
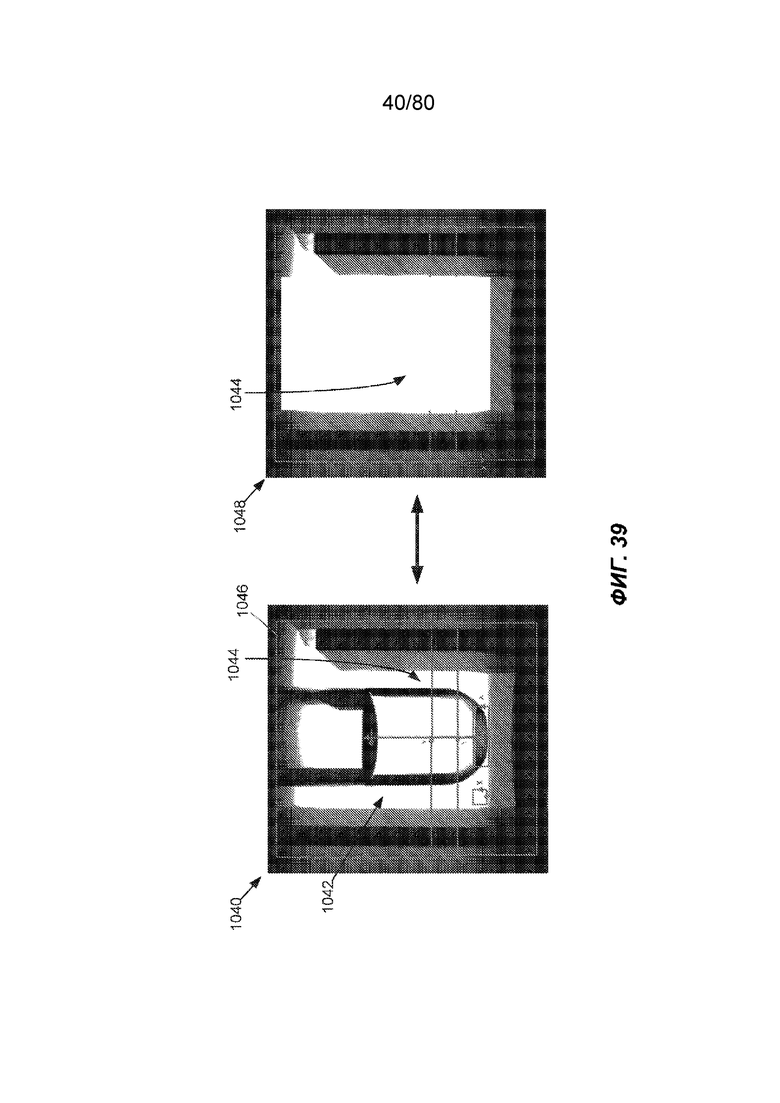

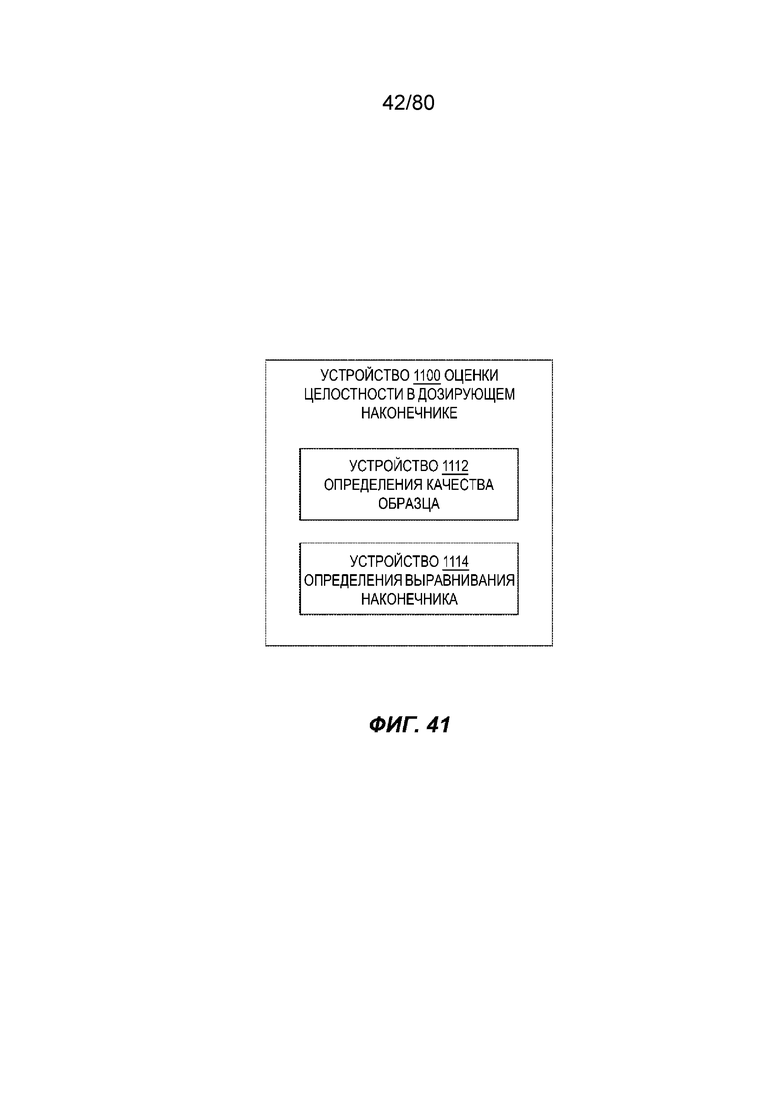
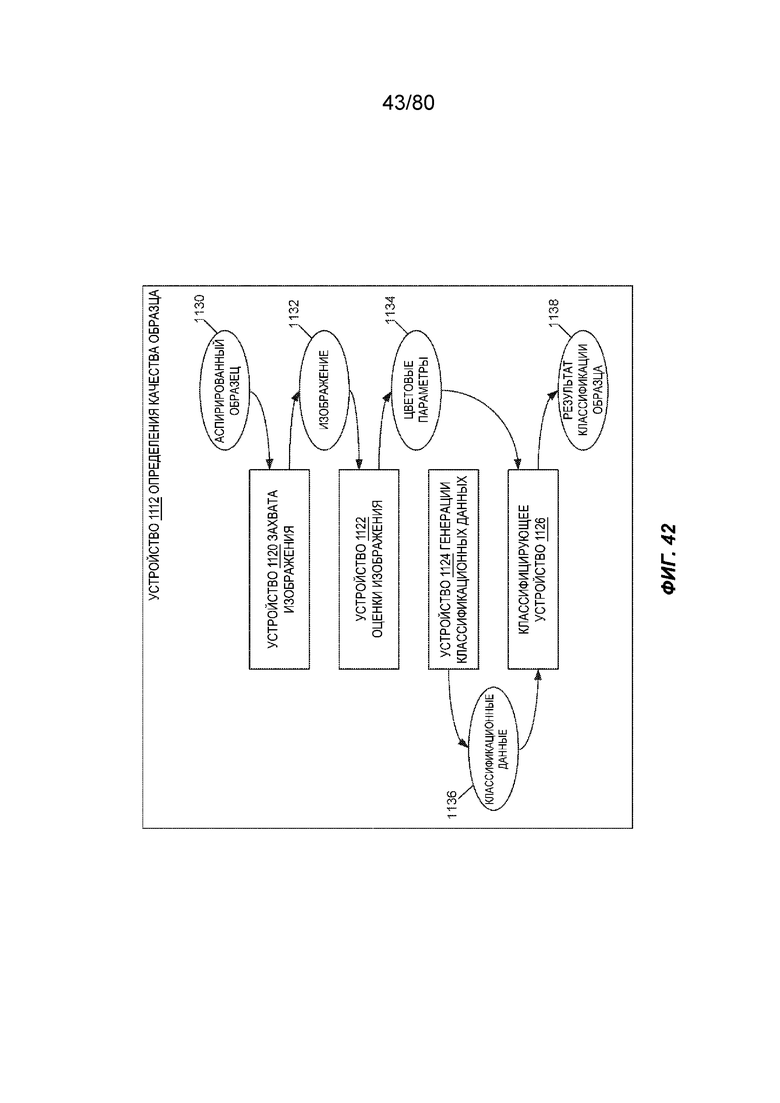
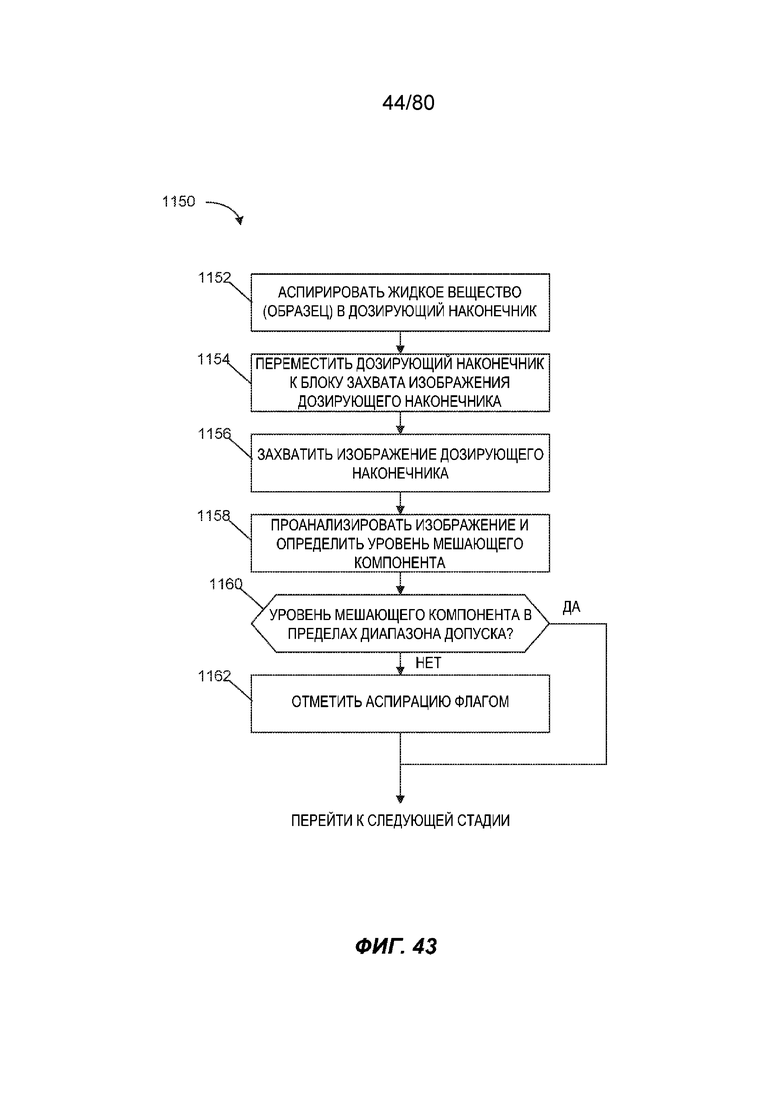
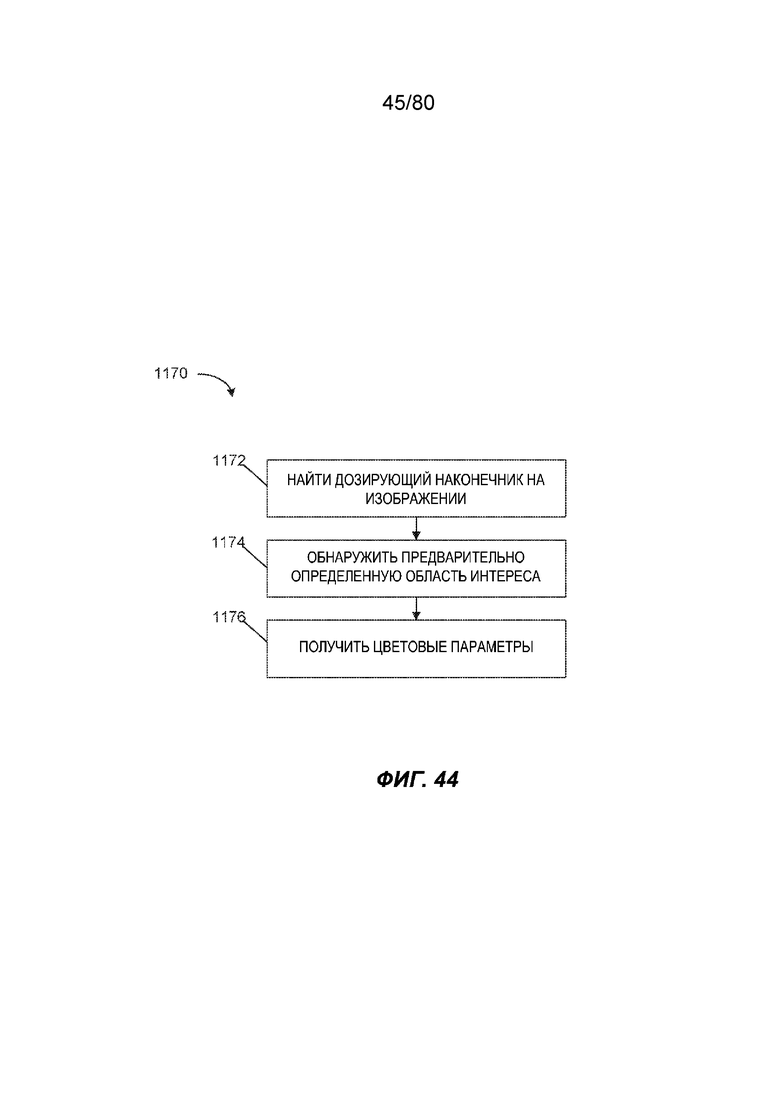
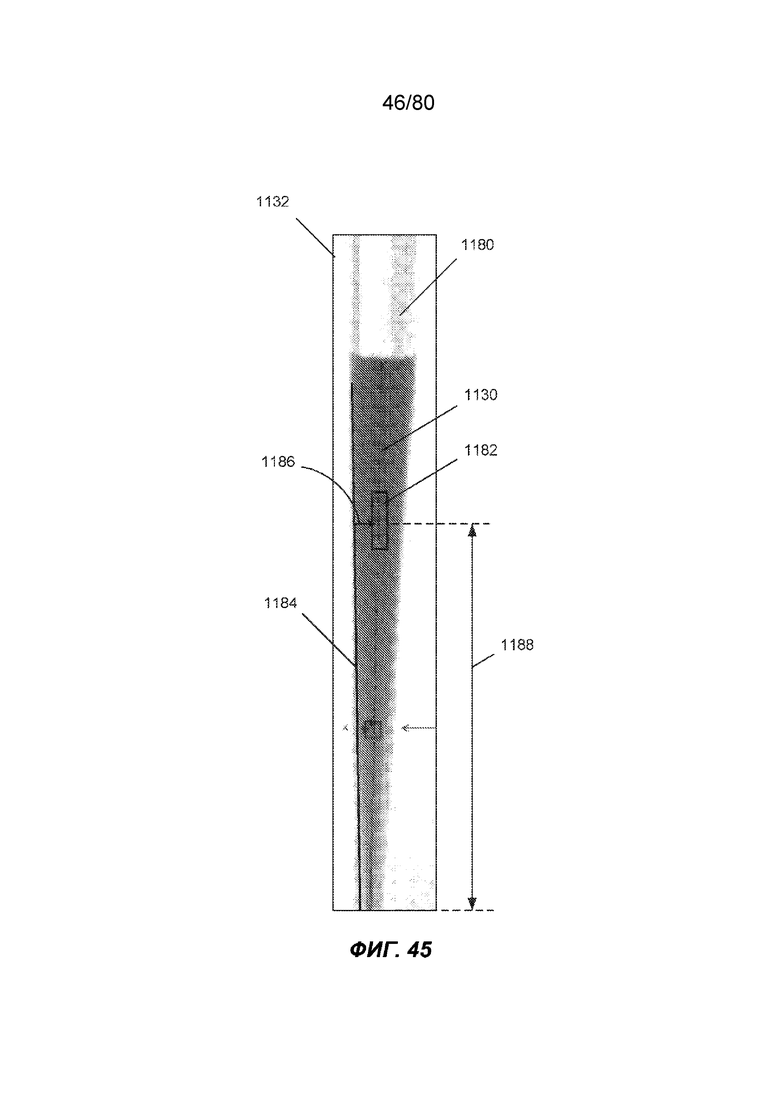
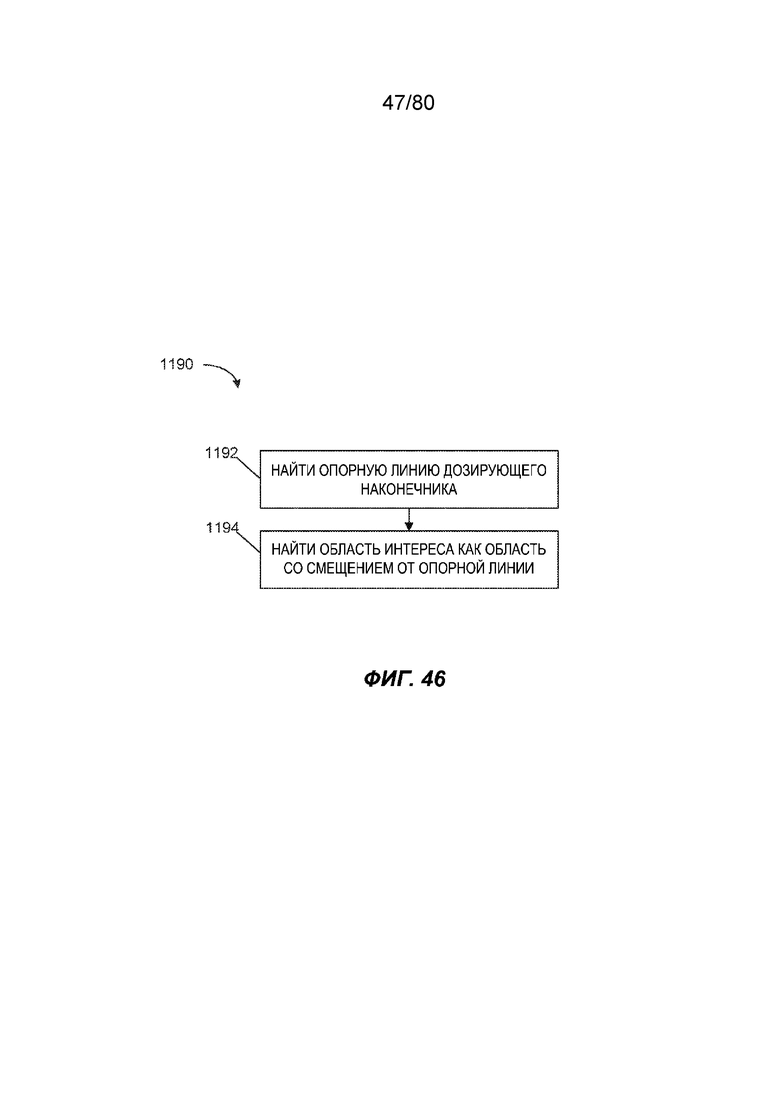
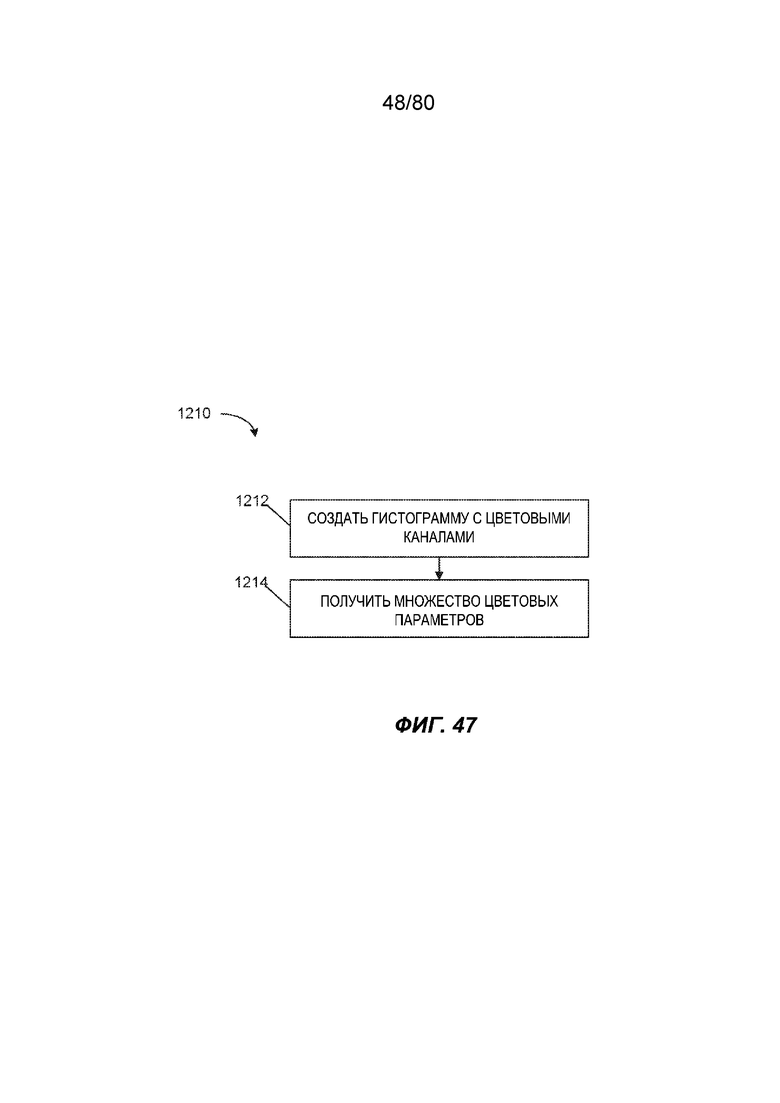
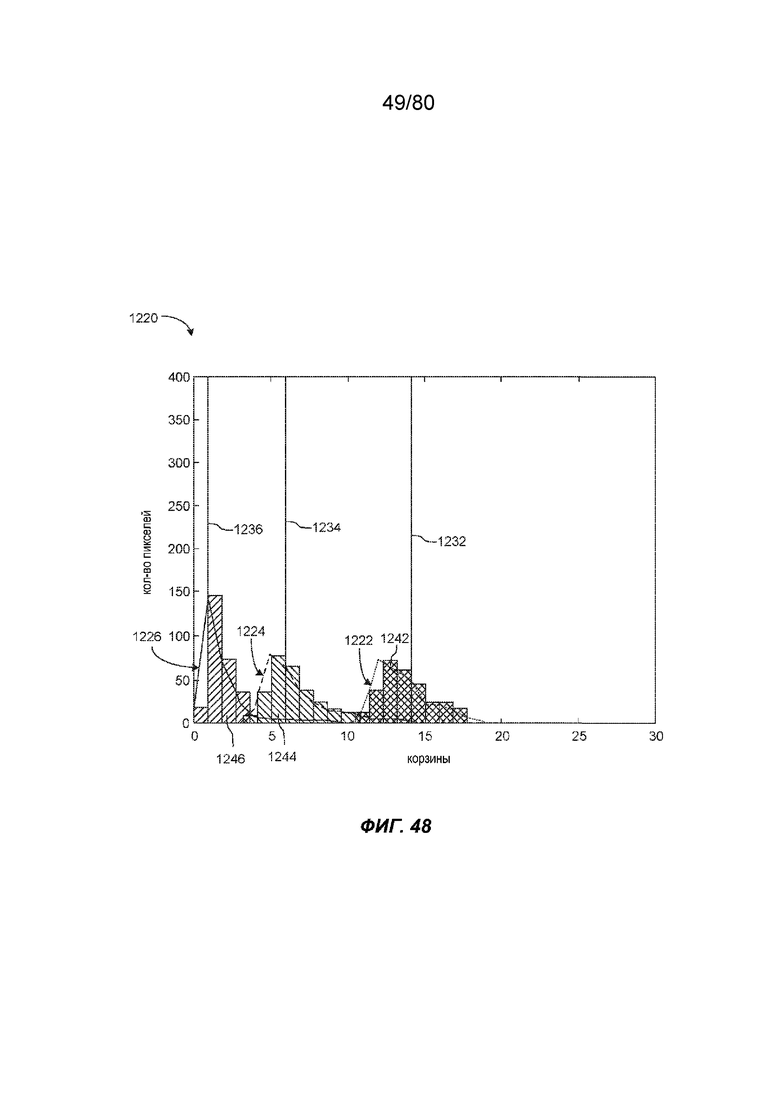
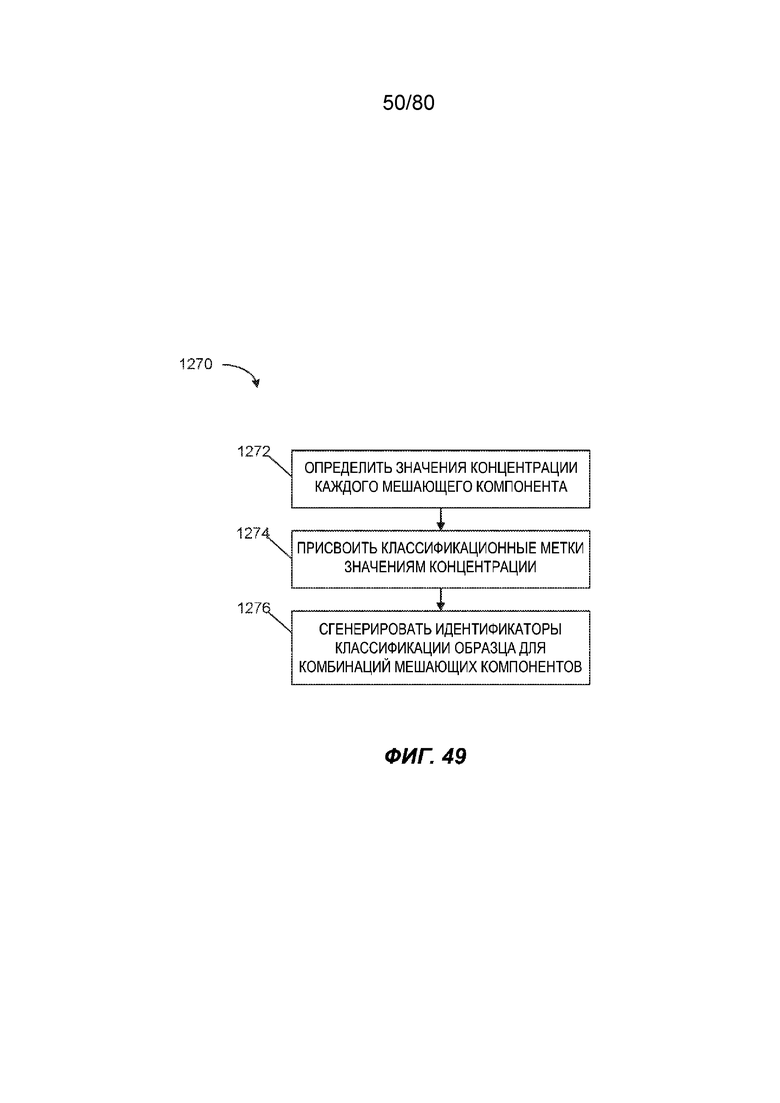
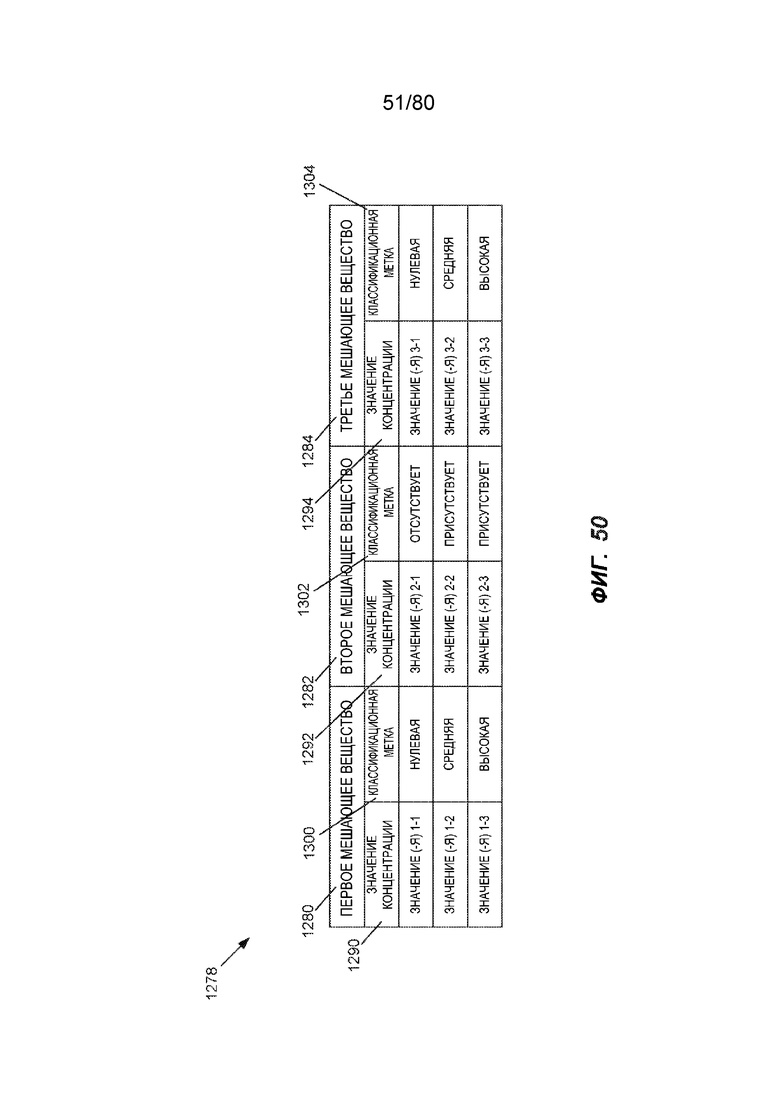
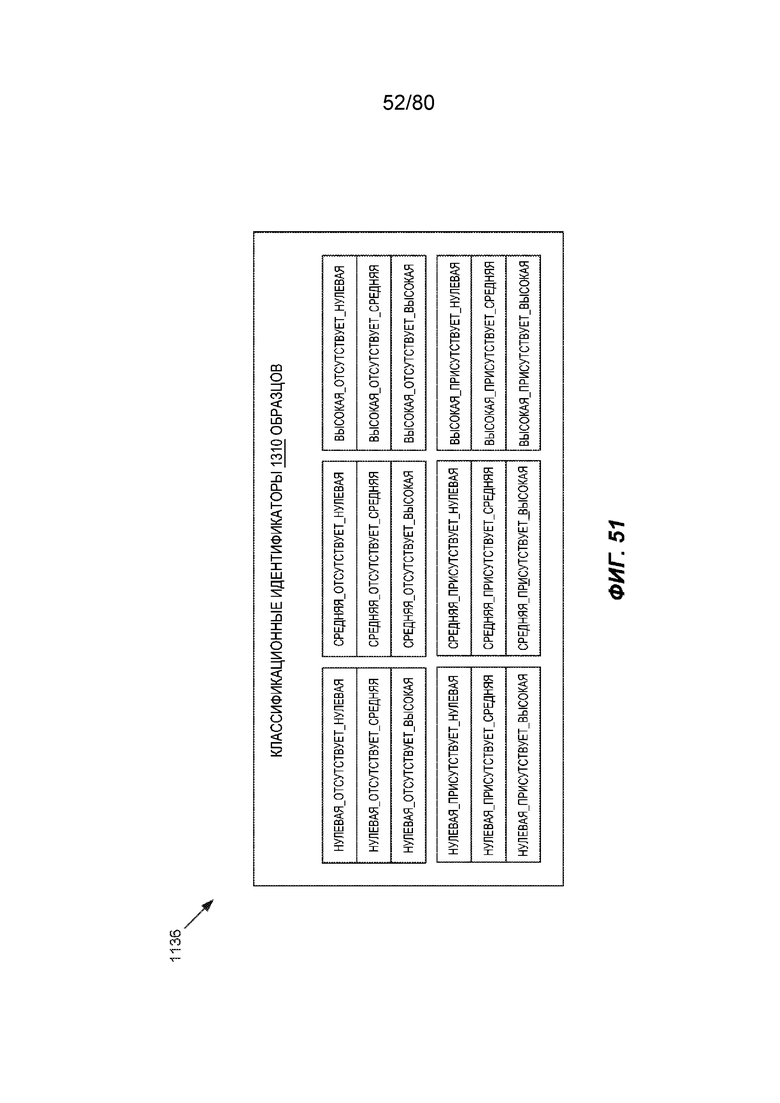
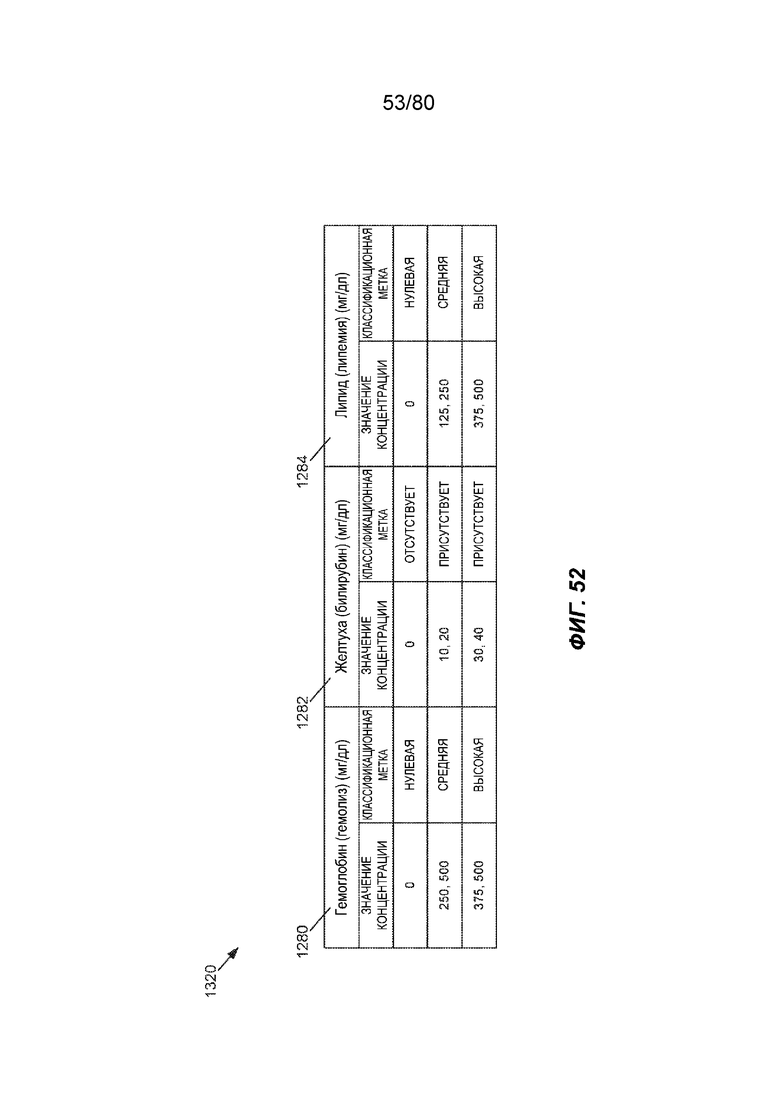
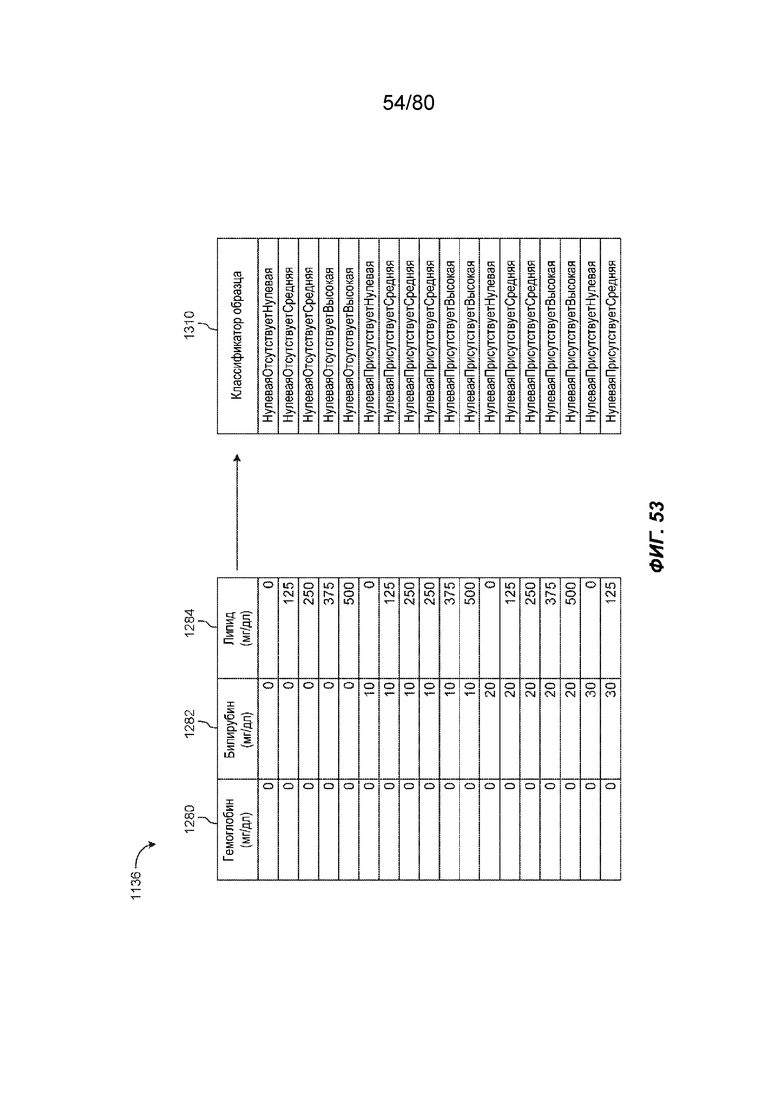
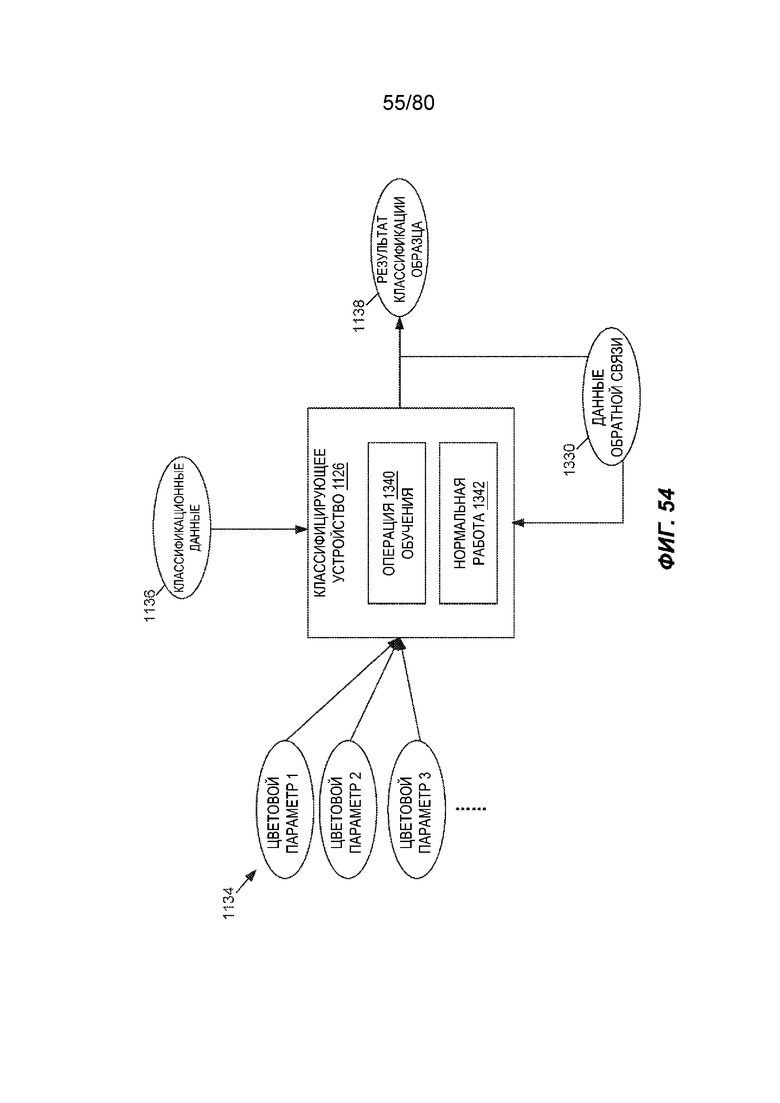
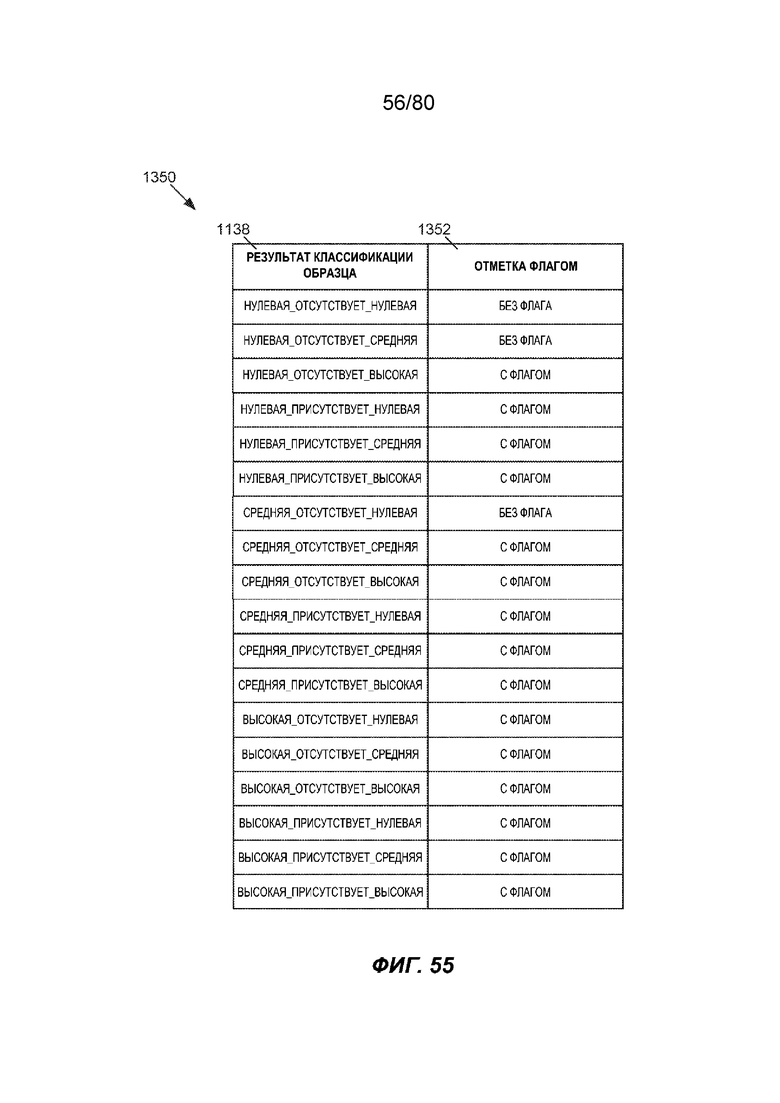
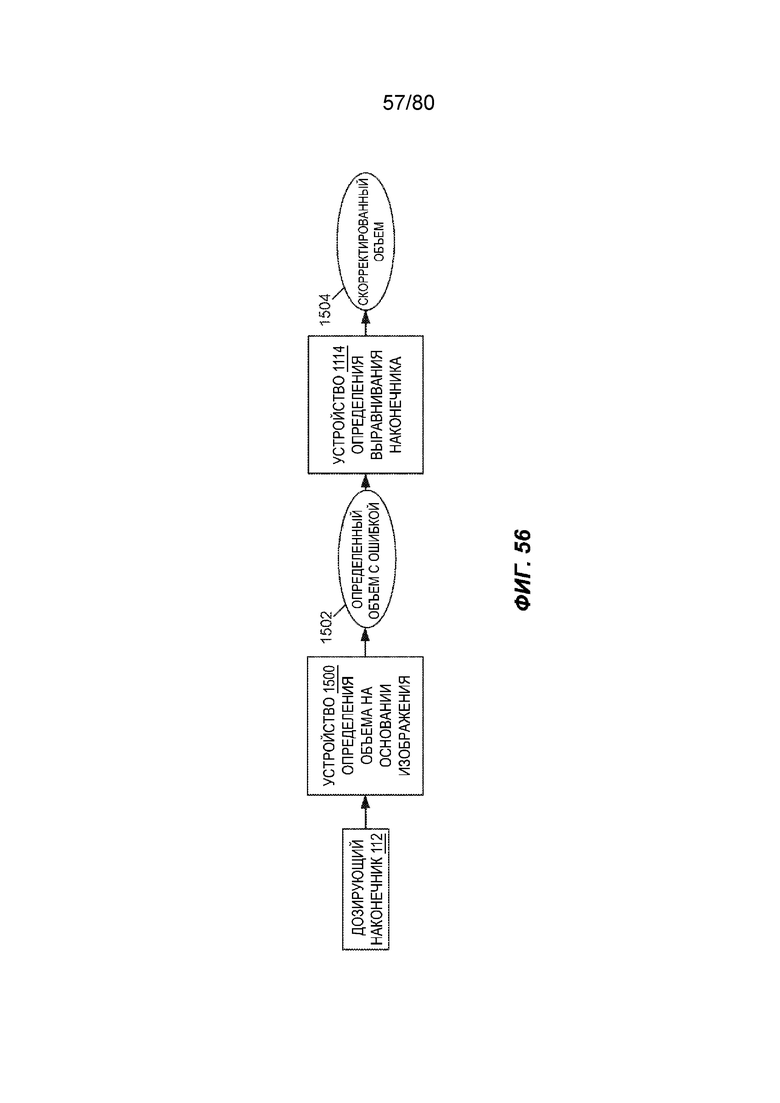
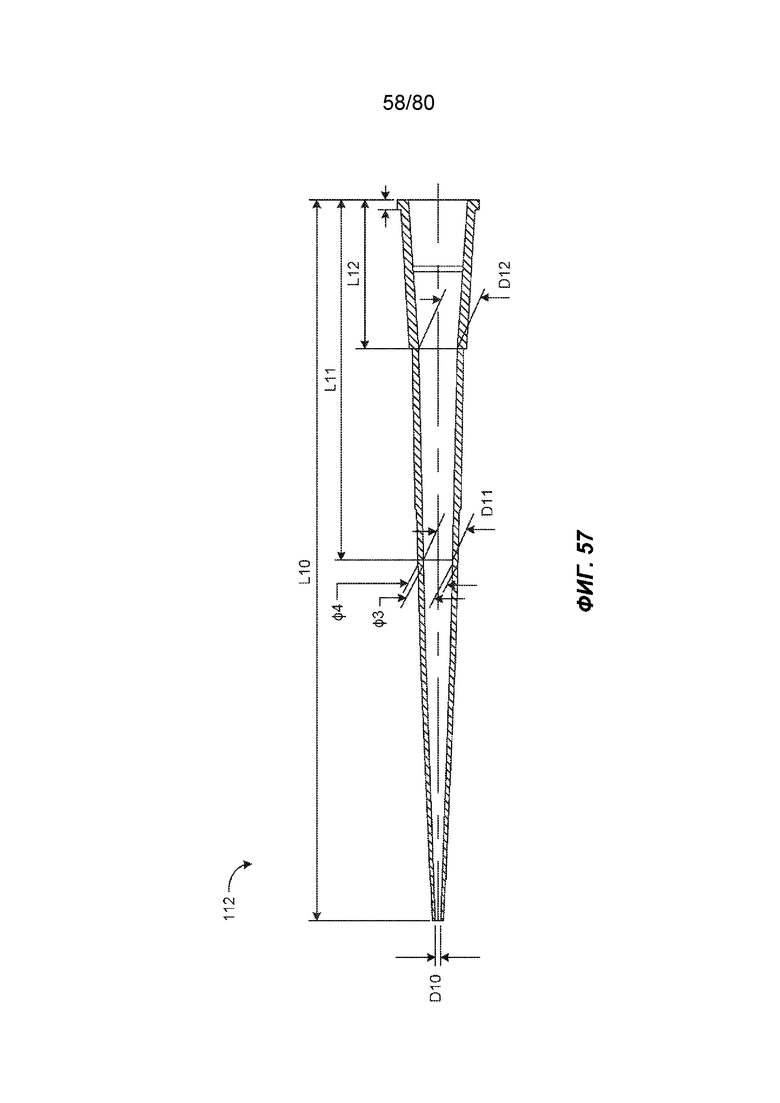
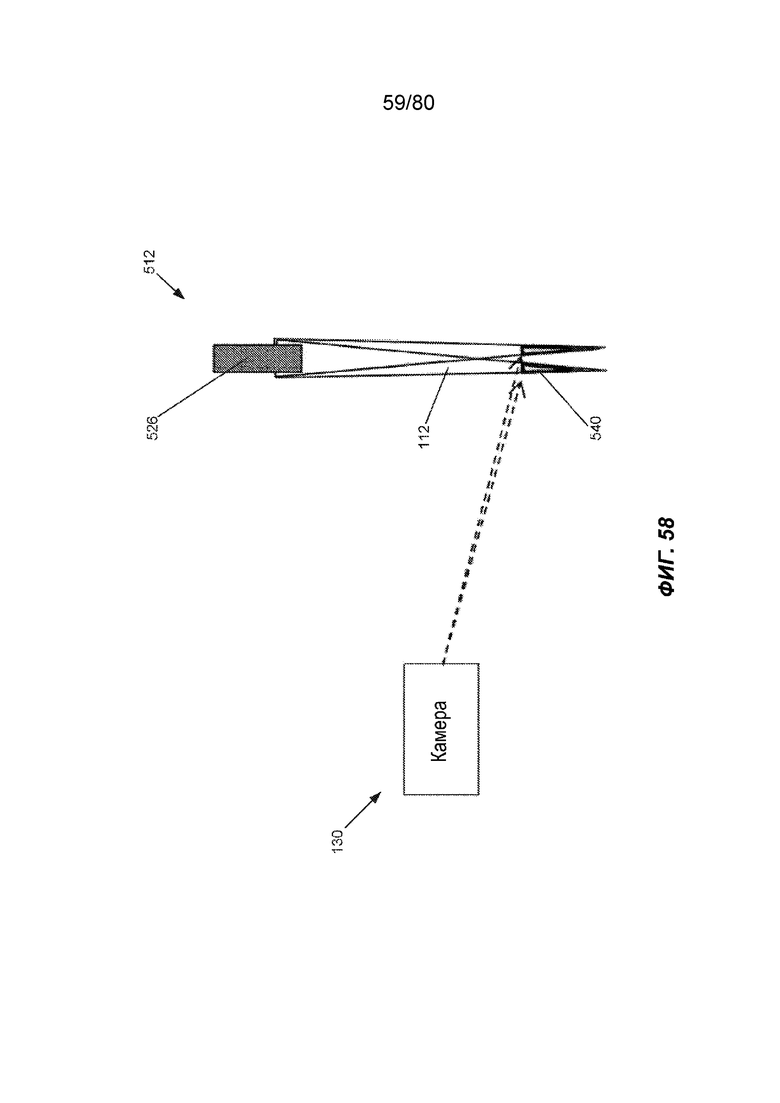
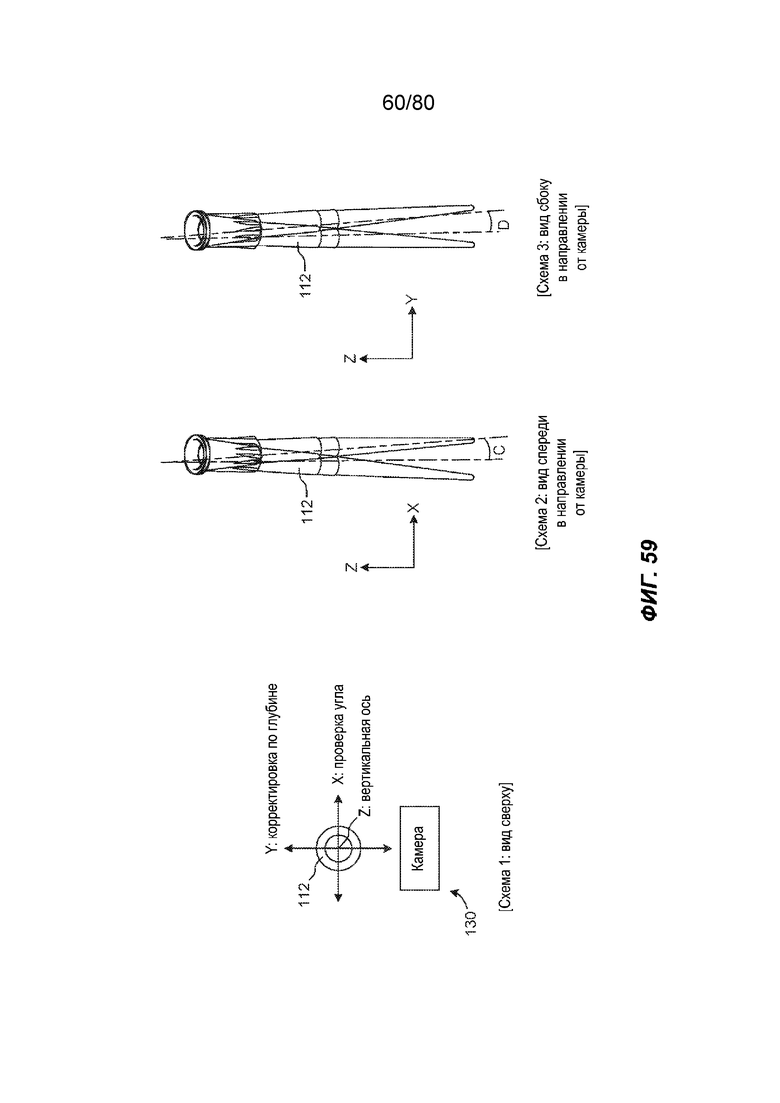
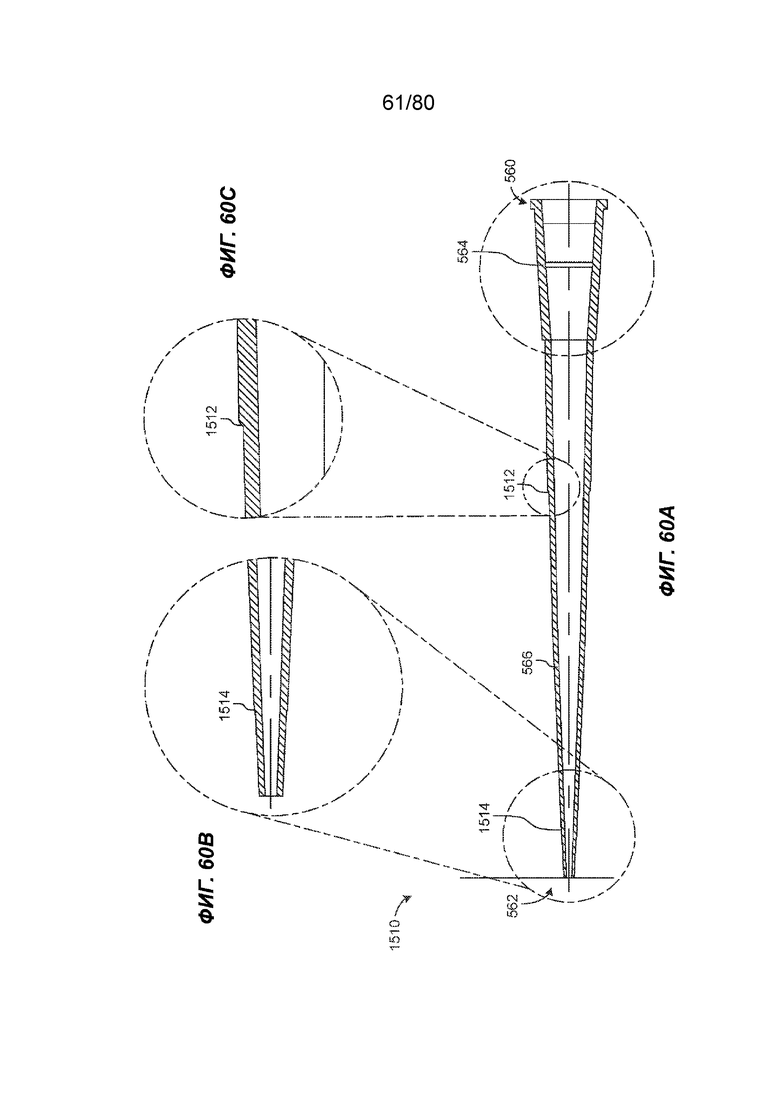
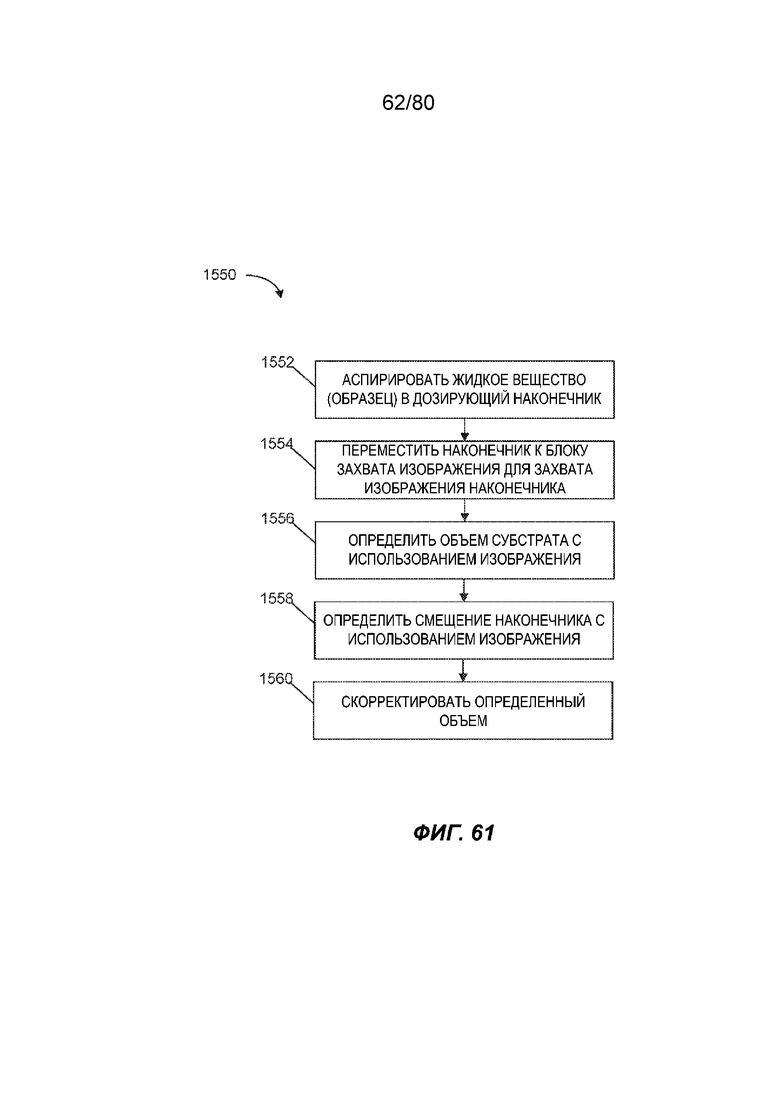
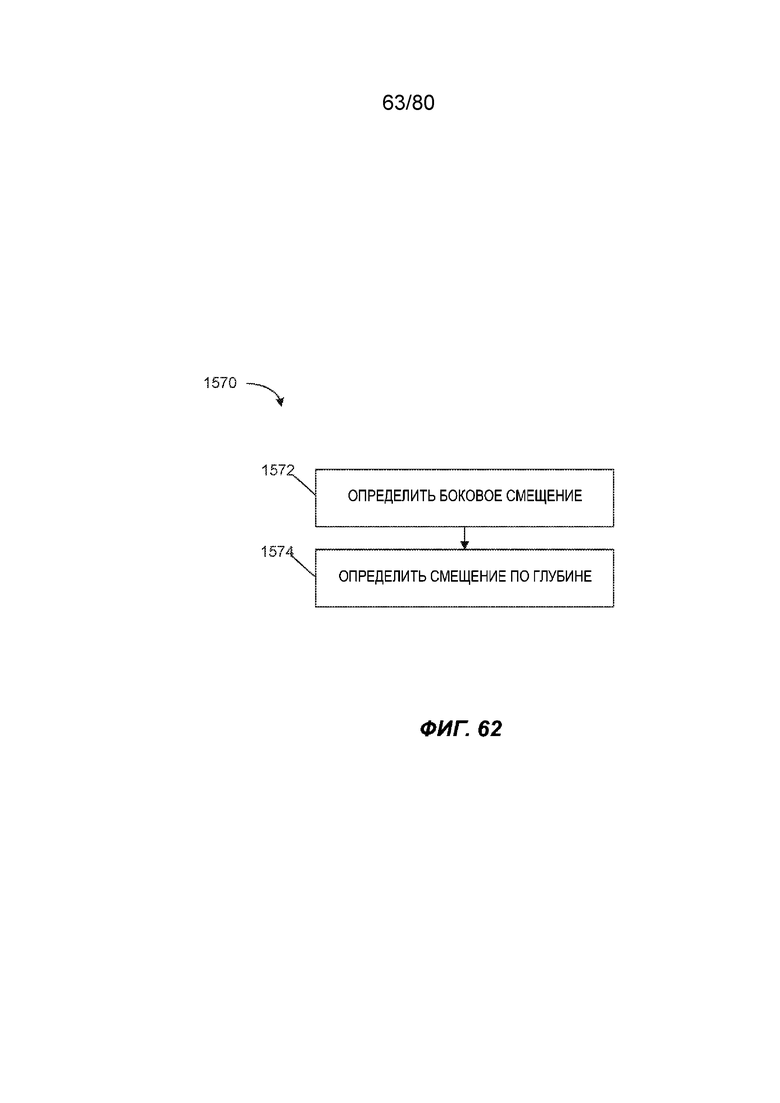
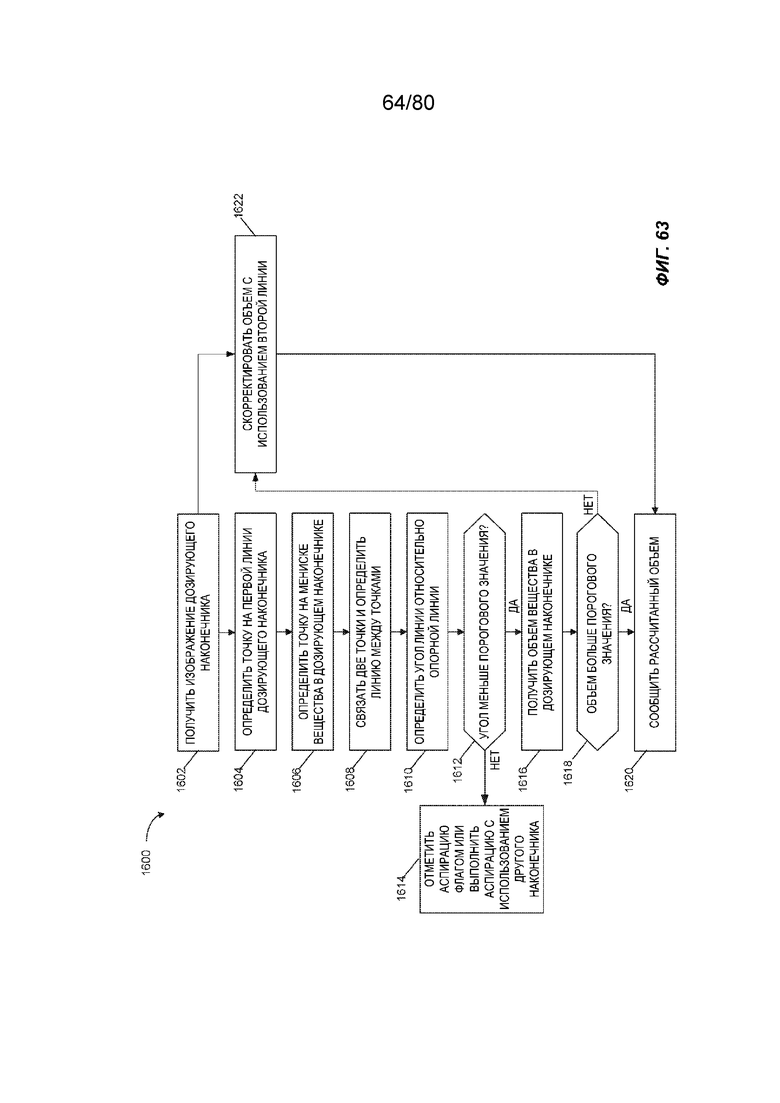
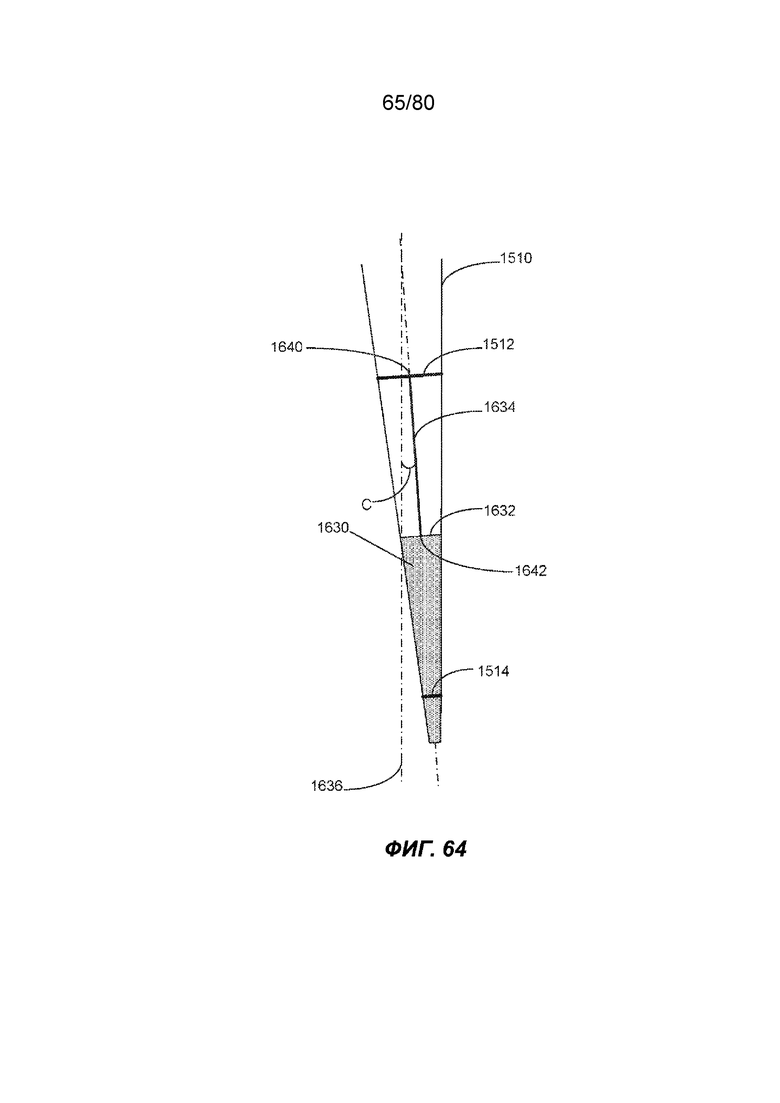
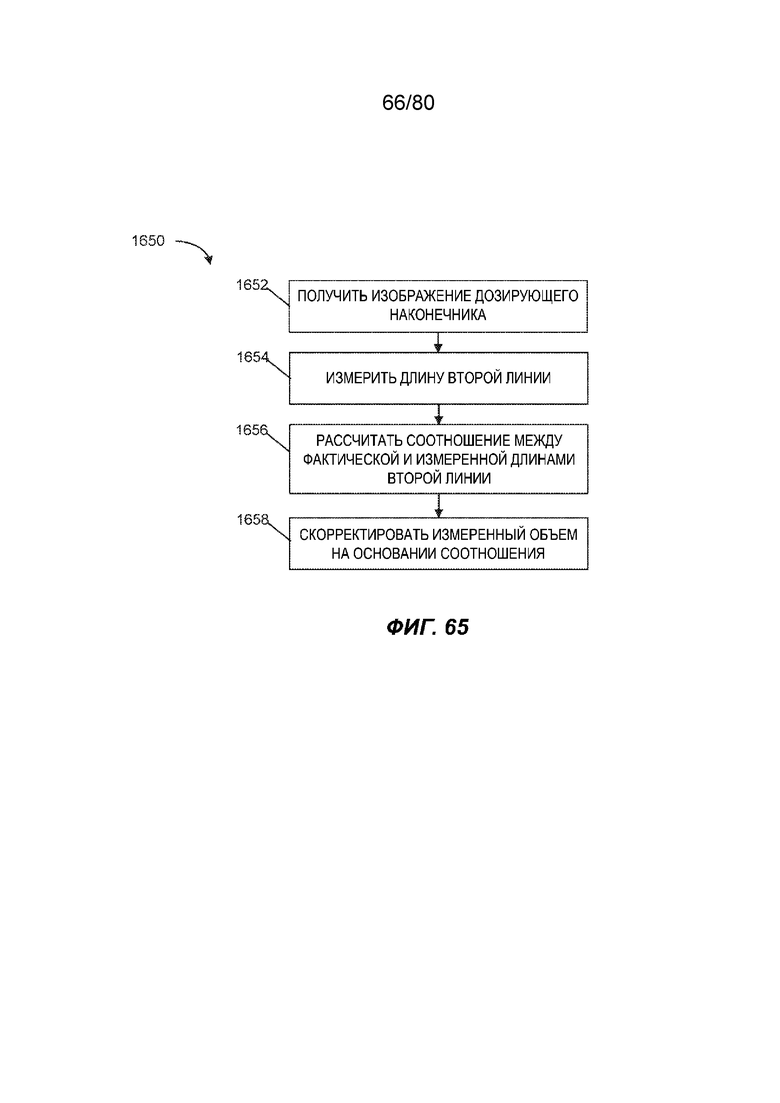
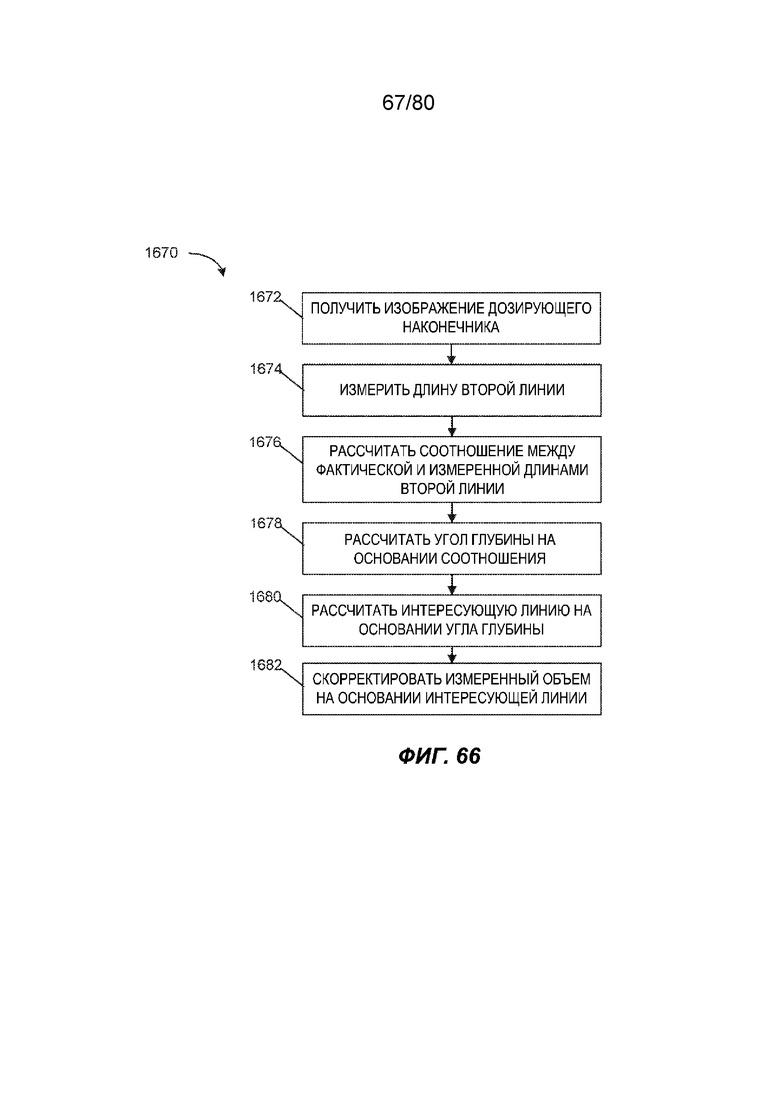
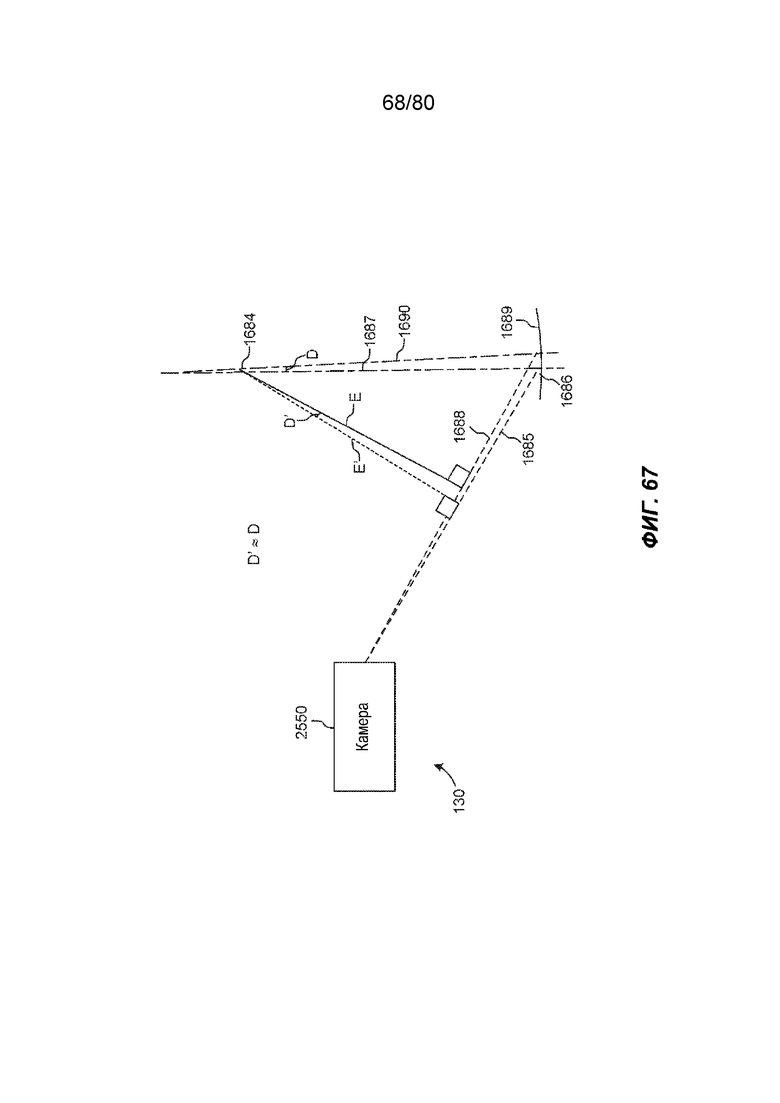
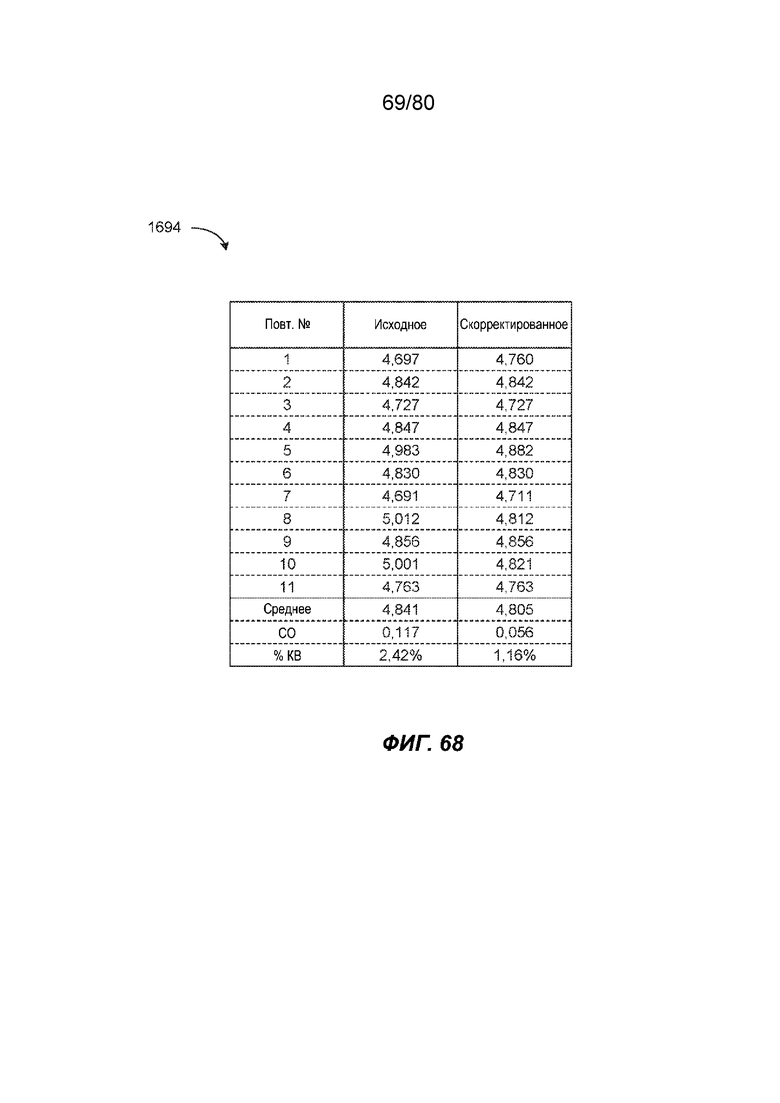
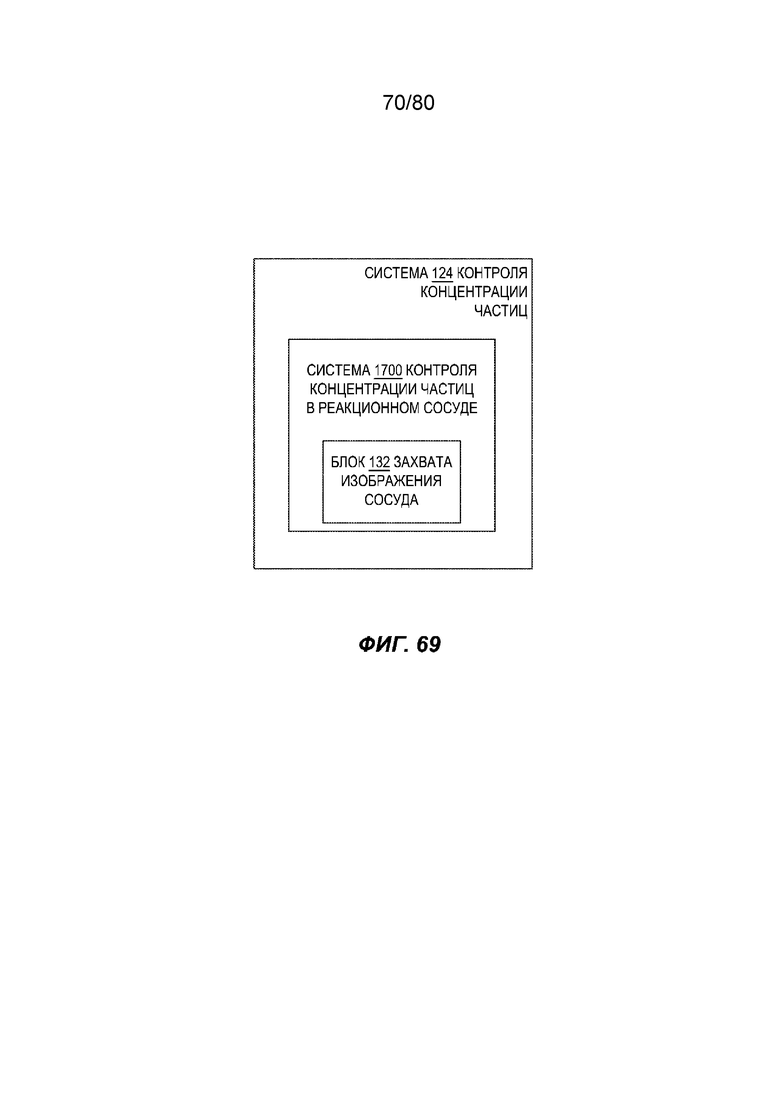
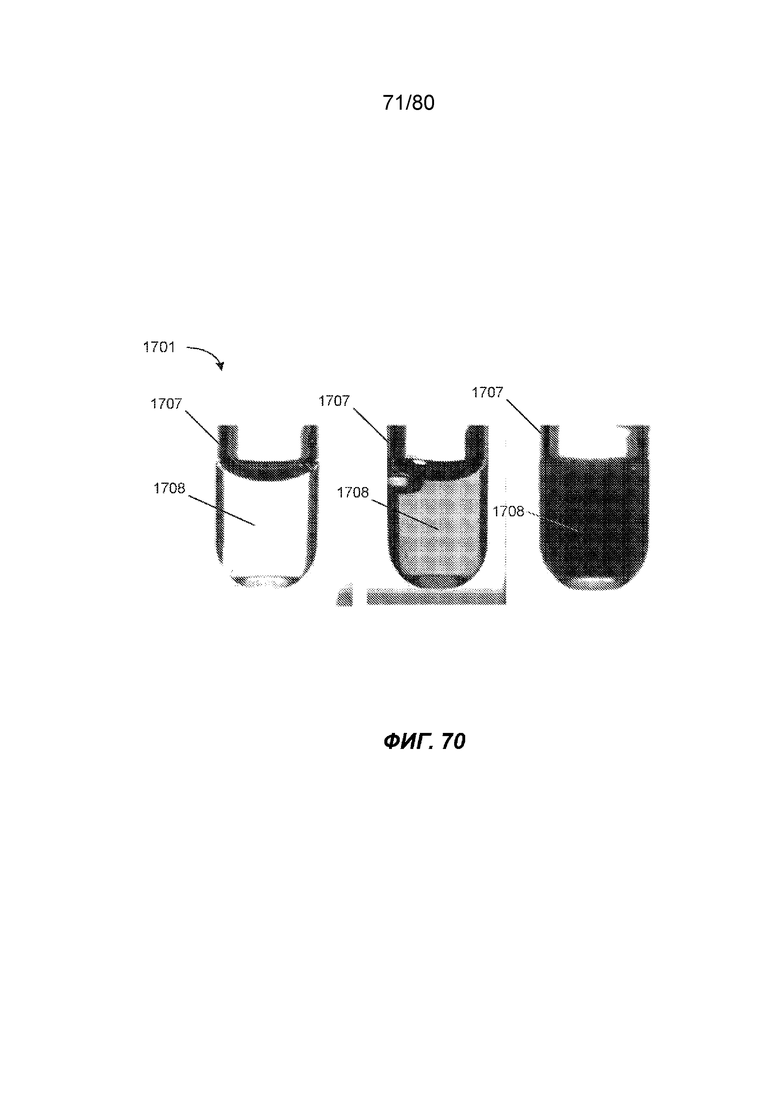
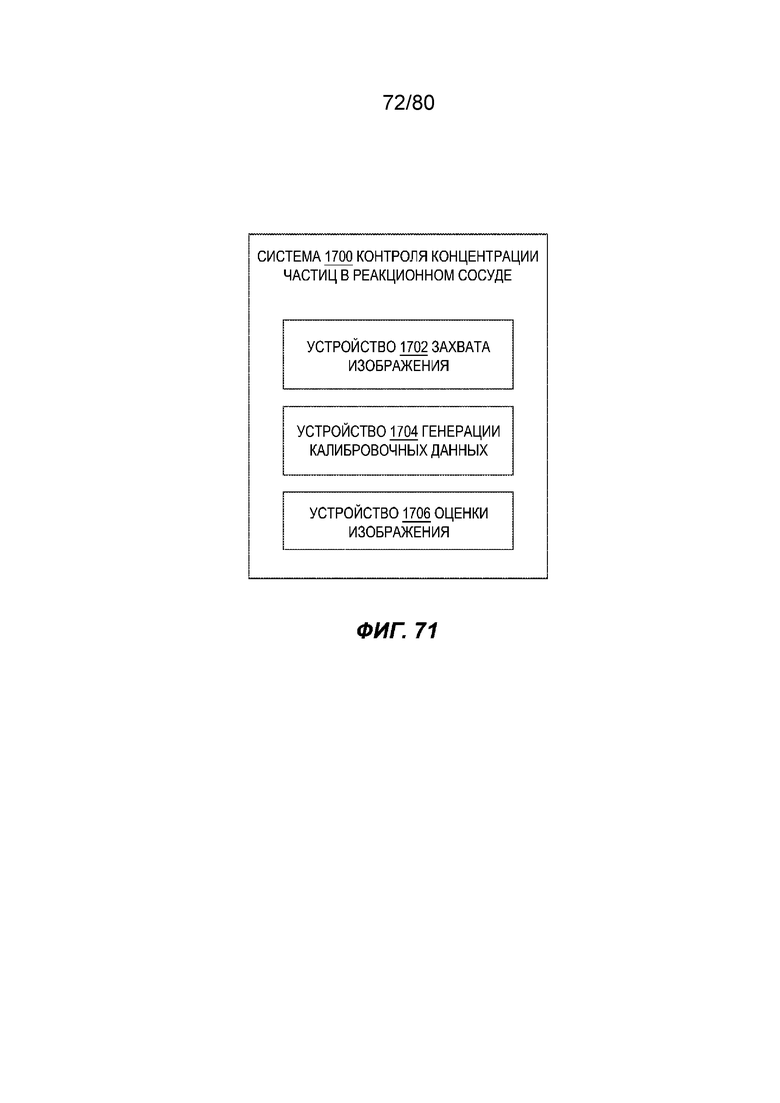
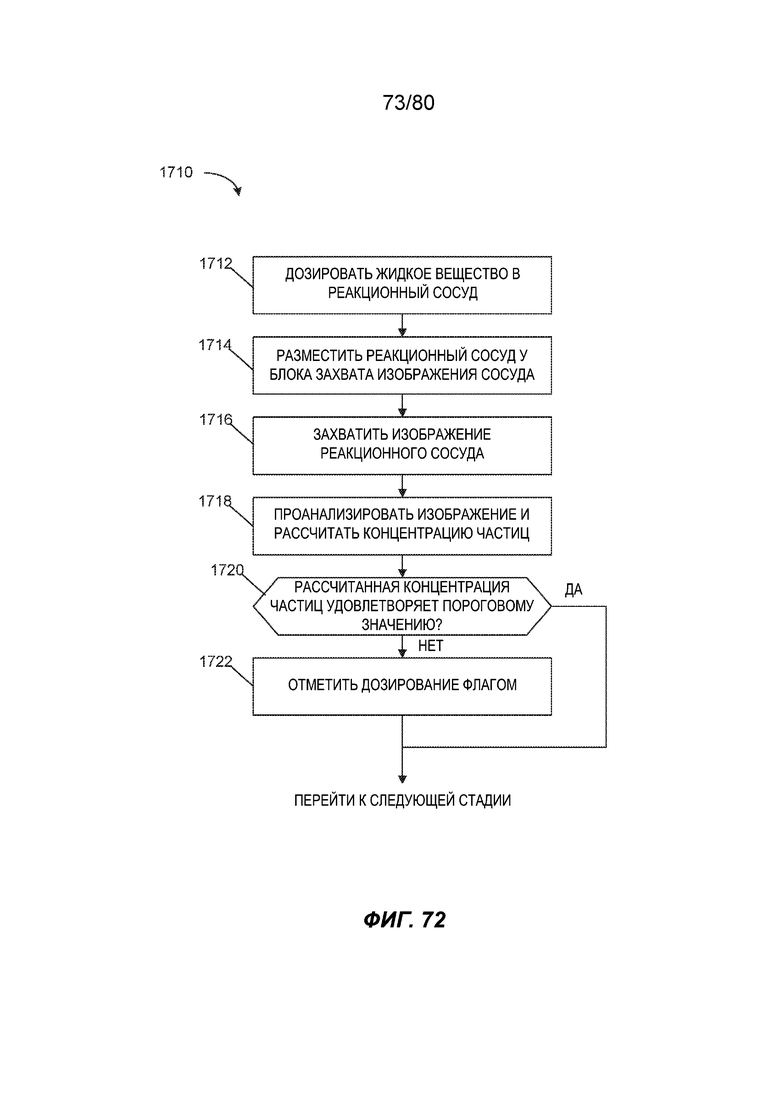
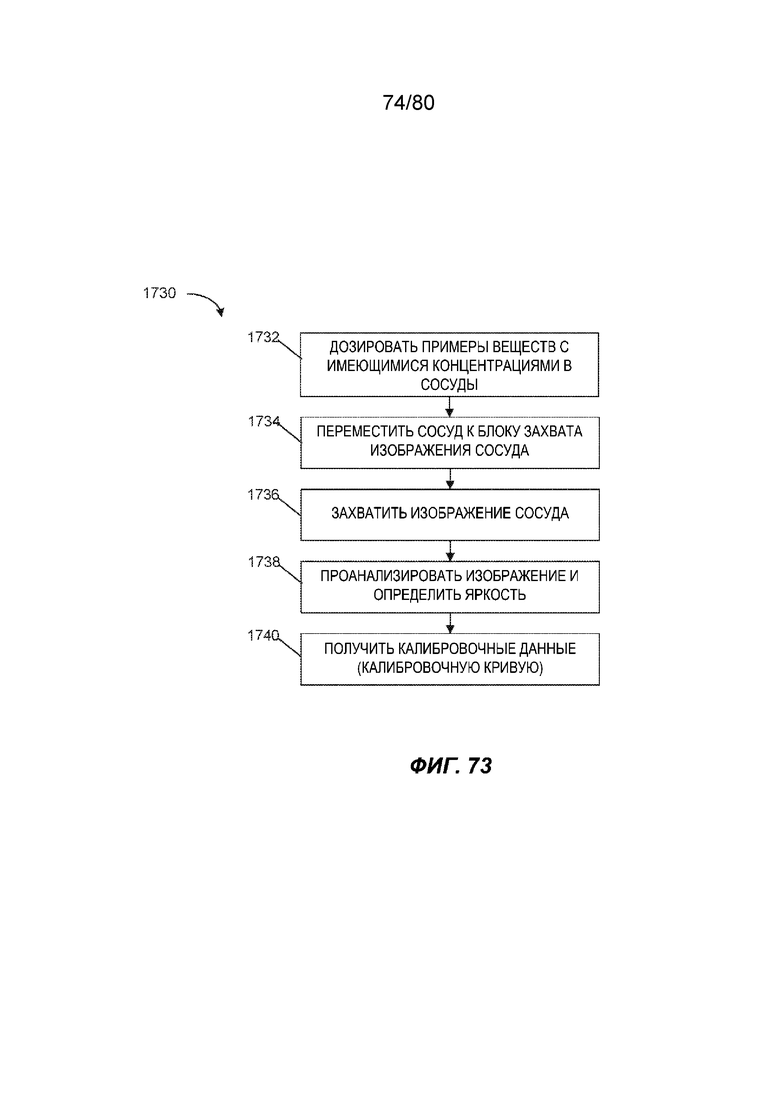
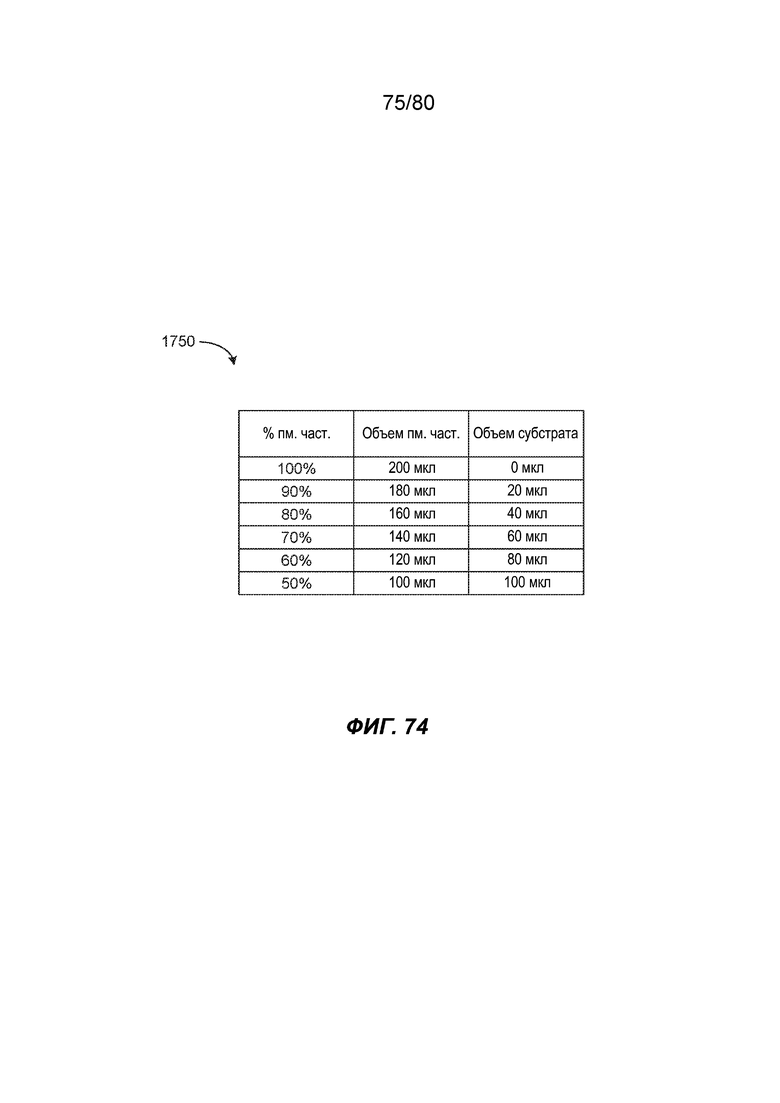
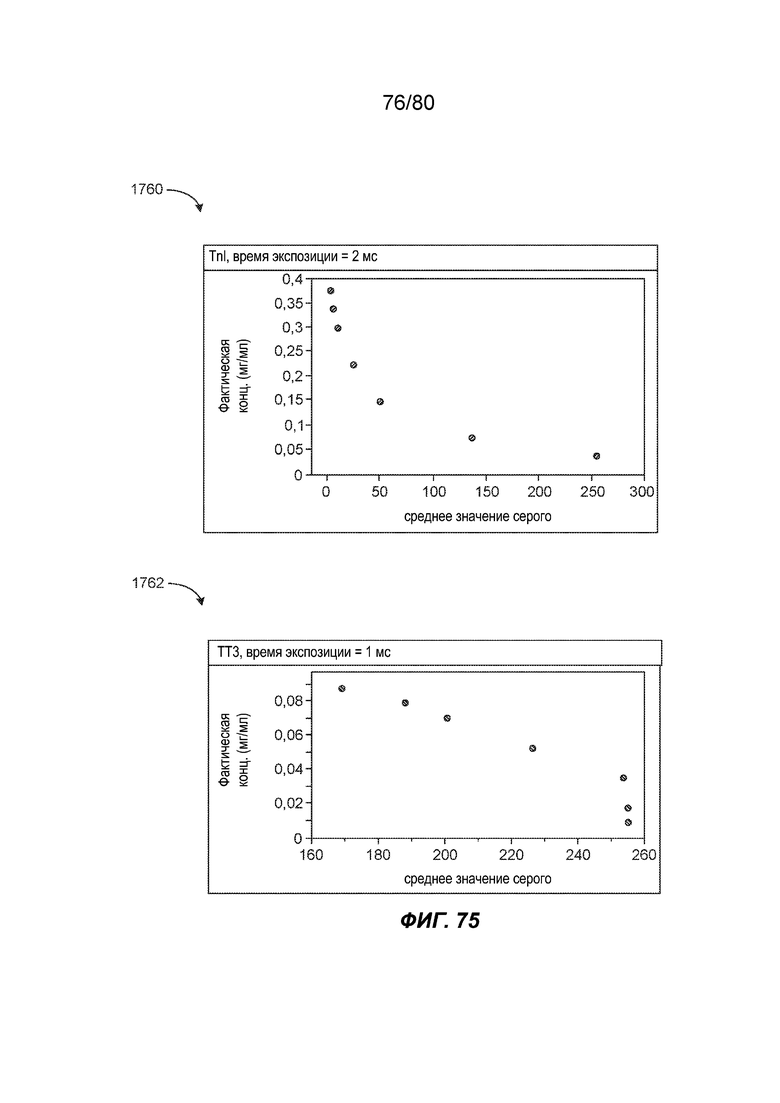
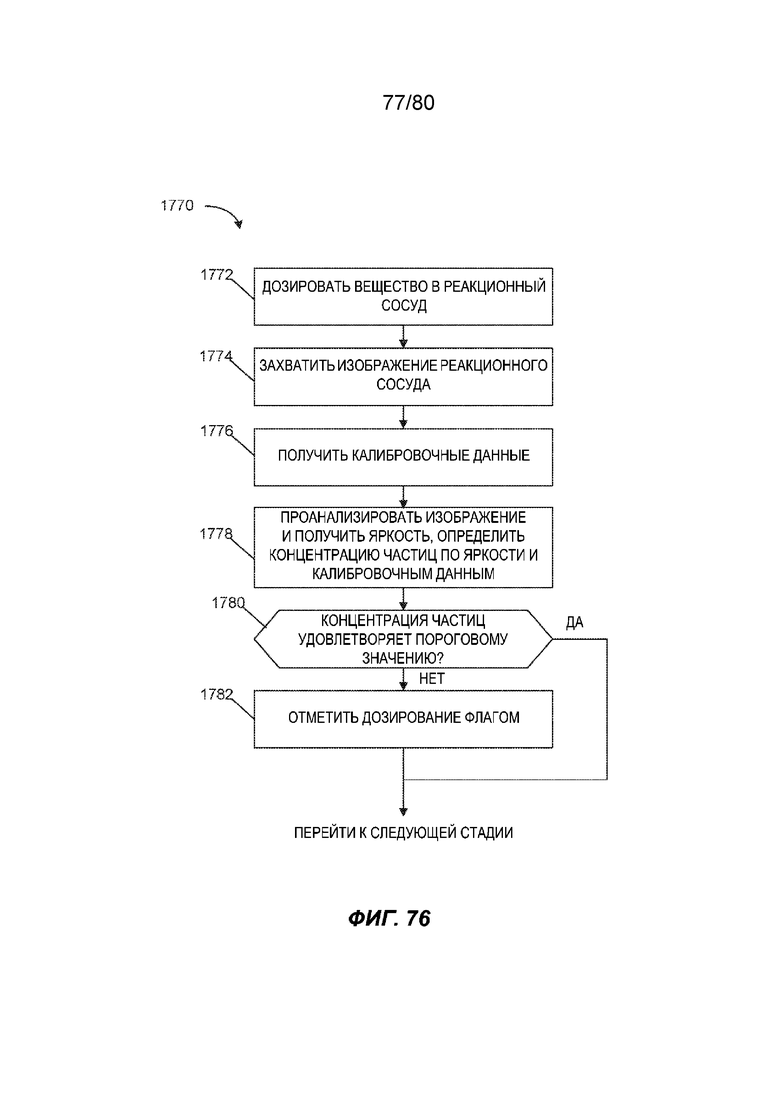
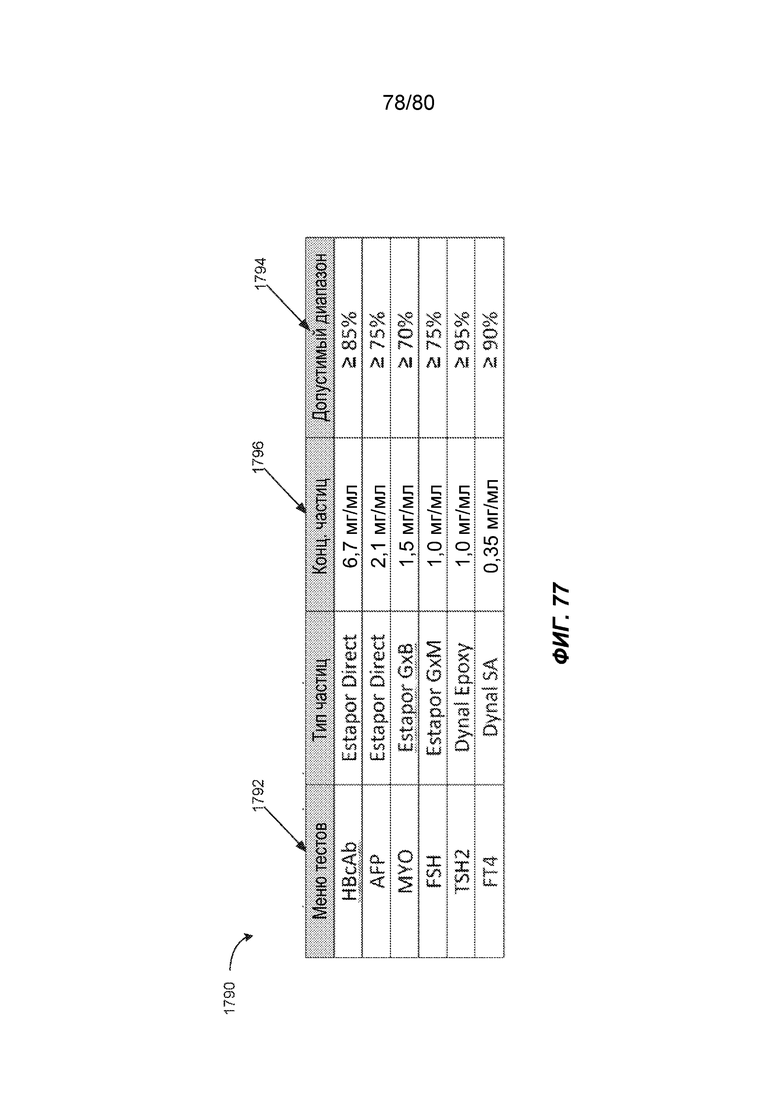
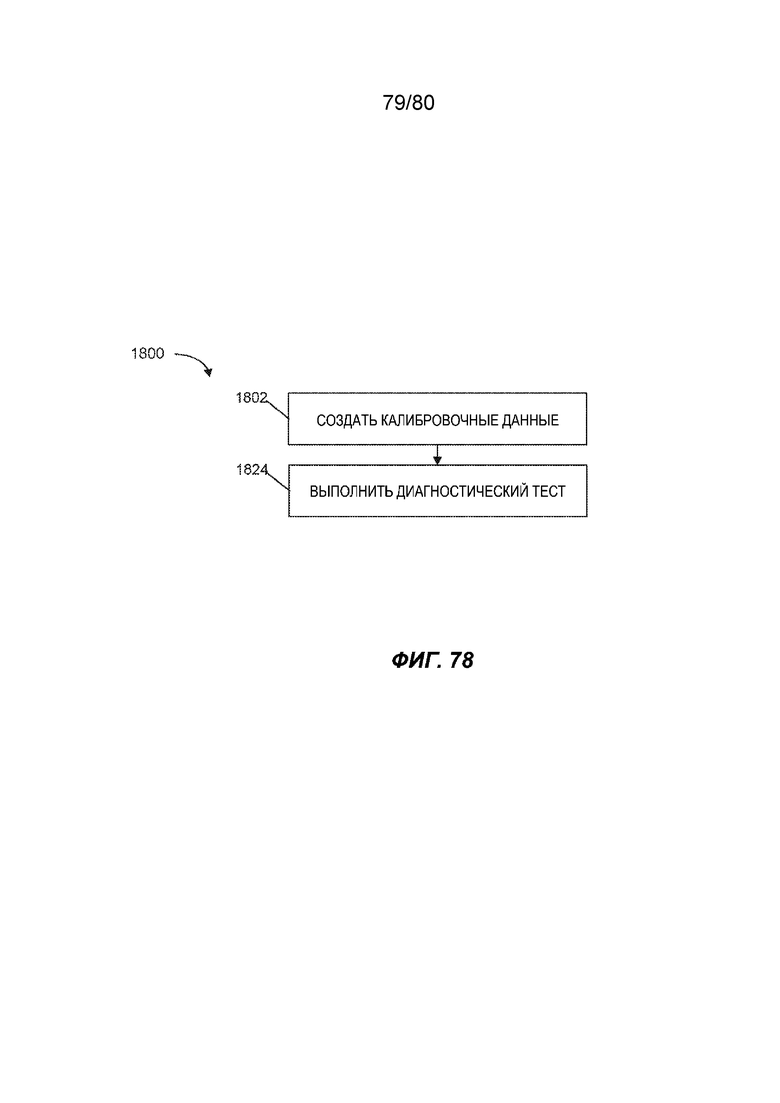
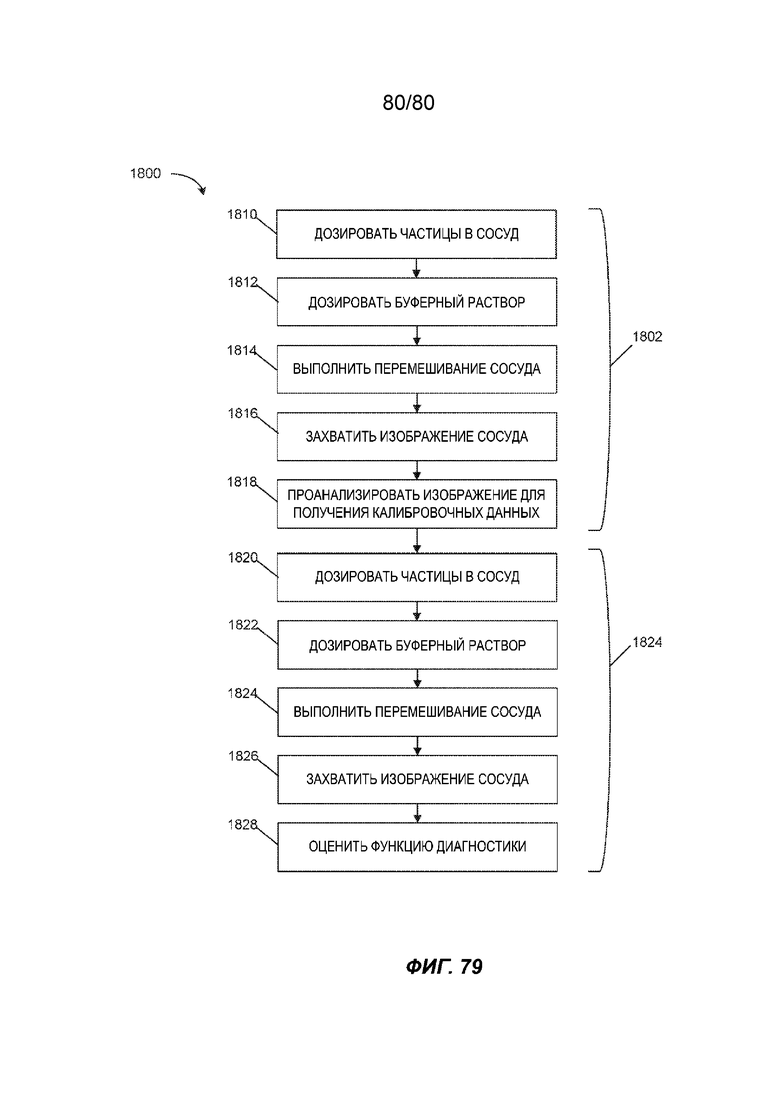
Изобретение относится к вычислительной технике. Технический результат заключается в обеспечении эффективного и точного способа количественного определения по меньшей мере одного мешающего компонента в текучем веществе. Способ оценки биологической пробы в текучем веществе, содержащем мешающий компонент, в контейнере, представляющем собой дозирующий наконечник, выполненный с возможностью аспирации текучего вещества, включает в себя: захват изображения по меньшей мере части контейнера с использованием устройства захвата изображения, причем на изображении захвачена по меньшей мере часть текучего вещества; получение множества цветовых параметров по меньшей мере части изображения с использованием по меньшей мере одного вычислительного устройства; и генерацию результата классификации образца для текучего вещества, содержащегося в контейнере, на основании множества цветовых параметров; причем, на основании цветовых параметров, мешающий компонент делится на по меньшей мере два сегмента, каждый сегмент имеет по меньшей мере два значения концентрации с отдельными классификационными метками для каждого значения концентрации; причем результат классификации образца основан на классификационной метке. 3 н. и 40 з.п. ф-лы, 82 ил., 1 табл.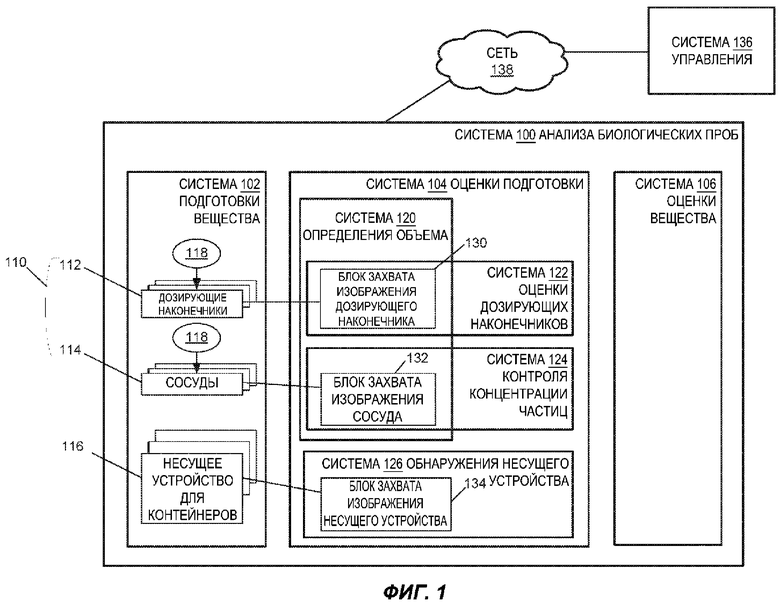
1. Способ оценки биологической пробы в текучем веществе, содержащем мешающий компонент, в контейнере, представляющем собой дозирующий наконечник, выполненный с возможностью аспирации текучего вещества, причем способ включает в себя:
захват изображения по меньшей мере части контейнера с использованием устройства захвата изображения, причем на изображении захвачена по меньшей мере часть текучего вещества;
получение множества цветовых параметров по меньшей мере части изображения с использованием по меньшей мере одного вычислительного устройства; и
генерацию результата классификации образца для текучего вещества, содержащегося в контейнере, на основании множества цветовых параметров;
причем, на основании цветовых параметров, мешающий компонент делится на по меньшей мере два сегмента, каждый сегмент имеет по меньшей мере два значения концентрации с отдельными классификационными метками для каждого значения концентрации;
причем результат классификации образца основан на классификационной метке.
2. Способ по п. 1, в котором получение множества цветовых параметров включает в себя:
генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов; и
получение множества средних значений для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество средних значений для множества цветовых каналов.
3. Способ по любому из пп. 1 и 2, в котором получение множества цветовых параметров включает в себя:
генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
получение множества римановых сумм для множества цветовых каналов;
при этом множество цветовых параметров включает в себя множество римановых сумм для множества цветовых каналов.
4. Способ по любому из предшествующих пунктов, в котором получение множества цветовых параметров включает в себя:
генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
получение множества мод для множества цветовых каналов; и/или
получение множества максимумов для множества цветовых каналов; и/или
получение множества минимумов для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество мод, максимумов и/или минимумов для множества цветовых каналов.
5. Способ по любому из предшествующих пунктов, в котором получение множества цветовых параметров включает в себя:
генерацию гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
получение множества начальных значений гистограмм для множества цветовых каналов; и/или
получение множества конечных значений гистограмм для множества цветовых каналов;
получение множества процентных начальных значений гистограмм для множества цветовых каналов; и/или
получение множества процентных конечных значений гистограмм для множества цветовых каналов, при этом множество цветовых параметров включает в себя множество начальных значений гистограмм, конечных значений гистограмм, начальных процентных значений гистограмм и/или конечных процентных значений гистограмм для множества цветовых каналов.
6. Способ по любому из предшествующих пунктов, в котором множество цветовых параметров включает в себя по меньшей мере одно из множества средних значений для цветовых каналов, множества римановых сумм для цветовых каналов, множества мод для цветовых каналов, множества максимумов для цветовых каналов, множества минимумов для цветовых каналов, множества начальных значений гистограмм для цветовых каналов, множества конечных значений гистограмм для цветовых каналов, множества процентных начальных значений гистограмм для цветовых каналов, множества процентных конечных значений гистограмм для цветовых каналов или любую комбинацию вышеуказанного.
7. Способ по любому из пп. 2–6, в котором множество цветовых каналов включает в себя красный компонент, зеленый компонент и синий компонент.
8. Способ по любому из предшествующих пунктов, в котором результат классификации образца содержит по меньшей мере один классификационный идентификатор, причем по меньшей мере один классификационный идентификатор сопоставлен с по меньшей мере частью из множества цветовых параметров и/или сопоставлен с концентрацией по меньшей мере одного мешающего компонента в текучем веществе.
9. Способ по любому из предшествующих пунктов, дополнительно включающий в себя
генерацию отмеченного флагом результата на основании результата классификации образца, причем отмеченный флагом результат указывает на качество текучего вещества.
10. Способ по любому из предшествующих пунктов, в котором упомянутый по меньшей мере один мешающий компонент представляет собой одно или более из гемоглобина, состояния желтухи и липемии.
11. Способ по любому из предшествующих пунктов, в котором устройство захвата изображения выполнено и/или размещено с возможностью захвата изображения части текучего вещества и/или контейнера сбоку от контейнера.
12. Способ по любому из предшествующих пунктов, дополнительно включающий в себя:
идентификацию опорной точки на изображении с использованием по меньшей мере одного вычислительного устройства, причем опорная точка связана с контейнером;
идентификацию уровня поверхности текучего вещества внутри контейнера на изображении с использованием по меньшей мере одного вычислительного устройства;
определение расстояния между опорной точкой и уровнем поверхности; и
преобразование расстояния в объем текучего вещества на основании корреляционных данных, при этом корреляционные данные включают в себя информацию о корреляции между объемами внутри контейнера и расстояниями от опорной точки до множества уровней поверхности внутри контейнера.
13. Способ по п. 12, в котором расстояние измеряется в пикселях.
14. Способ по п. 12 или 13, в котором опорная линия идентифицирована на основании соответствия шаблону и/или сегментации захваченного изображения.
15. Способ по любому из пп. 12-14, в котором идентификация опорной линии включает в себя поиск шаблона, представляющего опорную линию, на захваченном изображении.
16. Способ по любому из пп. 12-15, в котором идентификация опорной линии включает в себя сравнение по меньшей мере части захваченного изображения с эталонным изображением.
17. Способ по п. 16, дополнительно включающий в себя:
определение коэффициента соответствия и/или значения корреляции части захваченного изображения и эталонного изображения.
18. Способ по любому из предшествующих пунктов, дополнительно включающий в себя:
подачу текучей среды в дополнительный контейнер;
определение объема поданной текучей среды;
захват дополнительного изображения контейнера;
определение расстояния в пикселях до опорной точки на изображении, связанной с дополнительным контейнером; и
сопоставление определенного объема с определенным расстоянием в пикселях.
19. Способ по п. 18, дополнительно включающий в себя
генерацию корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
20. Способ по п. 19, в котором корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов текучей среды, поданной в дополнительный контейнер.
21. Способ по любому из пп. 18-20, в котором поданная текучая среда содержит раствор красителя и/или в котором объем поданной текучей среды определяется на основании спектрофотометрии.
22. Способ по любому из пп. 18-21, в котором определение объема поданной текучей среды включает в себя определение массы поданной текучей среды.
23. Невременный машиночитаемый носитель, на котором хранится компьютерный программный элемент, который при исполнении на вычислительном устройстве системы для оценки текучего вещества подает вычислительному устройству инструкции на выполнение стадий способа по любому из пп. 1-22.
24. Система оценки биологической пробы в текучем веществе, содержащем мешающий компонент, причем система содержит:
устройство пипетирования образца с контейнером, который представляет собой дозирующий наконечник,
причем устройство пипетирования образца выполнено с возможностью по меньшей мере частичного зацепления дозирующего наконечника и аспирации текучего вещества в дозирующий наконечник;
блок захвата изображения; и
по меньшей мере одно вычислительное устройство;
причем блок захвата изображения выполнен с возможностью захвата изображения по меньшей мере части текучего вещества в дозирующем наконечнике;
при этом вычислительное устройство выполнено с возможностью:
- получения множества цветовых параметров по меньшей мере части изображения; и
- генерации результата классификации образца для текучего вещества, содержащегося в дозирующем наконечнике, на основании множества цветовых параметров, которые указывают на концентрацию мешающего компонента;
причем, на основании из цветовых параметров, мешающий компонент имеет сегменты значений концентрации с классификационными метками,
причем результат классификации образца основан на классификационной метке.
25. Система по п. 24, в которой вычислительное устройство дополнительно выполнено с возможностью:
- генерации гистограммы для по меньшей мере части изображения, причем гистограмма содержит множество цветовых каналов;
- получения множества средних значений для множества цветовых каналов; и/или
- получения множества римановых сумм для множества цветовых каналов;
при этом множество цветовых параметров включает в себя множество средних значений и/или множество римановых сумм для цветовых каналов.
26. Система по любому из пп. 24 и 25, в которой результат классификации образца включает в себя по меньшей мере один классификационный идентификатор, причем по меньшей мере один классификационный идентификатор сопоставлен с по меньшей мере частью из множества цветовых параметров и/или сопоставлен с концентрацией по меньшей мере одного мешающего компонента в текучем веществе.
27. Система по любому из пп. 24-26, в которой вычислительное устройство дополнительно выполнено с возможностью:
- идентификации опорной точки на изображении, причем опорная точка связана с дозирующим наконечником;
- определения уровня поверхности текучего вещества внутри дозирующего наконечника на изображении;
- определения расстояния между опорной точкой и уровнем поверхности; и
- преобразования расстояния в объем текучего вещества на основании корреляционных данных, при этом корреляционные данные включают в себя информацию о корреляции между объемами внутри дозирующего наконечника и расстояниями от опорной точки до множества уровней поверхности внутри дозирующего наконечника.
28. Система по любому из пп. 24-27, в которой вычислительное устройство выполнено с возможностью определения опорной линии, образованной на корпусе дозирующего наконечника, и определения опорной точки на основании определенной опорной линии.
29. Система по п. 28, в которой вычислительное устройство выполнено с возможностью определения опорной линии на основании соответствия шаблону и/или сегментирования захваченного изображения.
30. Система по любому из пп. 24-29, в которой вычислительное устройство выполнено с возможностью поиска шаблона, представляющего опорную линию, на захваченном изображении.
31. Система по любому из пп. 24-30, в которой вычислительное устройство выполнено с возможностью сравнения по меньшей мере части захваченного изображения с эталонным изображением.
32. Система по п. 31, в которой вычислительное устройство выполнено с возможностью определения коэффициента соответствия и/или значения корреляции для части захваченного изображения и эталонного изображения.
33. Система по любому из пп. 24-32, в которой блок захвата изображения выполнен и/или размещен с возможностью захвата изображения части текучего вещества сбоку от дозирующего наконечника.
34. Система по любому из пп. 24-33, дополнительно содержащая модуль пипетирования образца, причем блок захвата изображения прикреплен к модулю пипетирования образца.
35. Система по любому из пп. 24-34, дополнительно содержащая источник света, расположенный напротив блока захвата изображения и расположенный сбоку от дозирующего наконечника, причем источник света выполнен с возможностью освещения дозирующего наконечника сбоку от дозирующего наконечника.
36. Система по любому из пп. 24-35, дополнительно содержащая источник света и модуль пипетирования образца, причем источник света и блок захвата изображения прикреплены к модулю пипетирования образца; и/или причем источник света и блок захвата изображения выполнены с возможностью перемещения вместе с модулем пипетирования образца так, что изображение дозирующего наконечника может быть захвачено в любом положении модуля пипетирования образца.
37. Система по любому из пп. 24-36, в которой устройство пипетирования образца выполнено с возможностью аспирации текучей среды в дополнительный дозирующий наконечник;
причем система выполнена с возможностью определения объема аспирированной текучей среды;
при этом блок захвата изображения выполнен с возможностью захвата дополнительного изображения дополнительного дозирующего наконечника;
при этом вычислительное устройство выполнено с возможностью определения расстояния в пикселях до опорной точки на изображении, связанной с дополнительным дозирующим наконечником, и выполнено с возможностью сопоставления определенного объема с определенным расстоянием в пикселях.
38. Система по п. 37, в которой вычислительное устройство выполнено с возможностью генерации корреляционных данных на основании определенного объема и определенного расстояния в пикселях.
39. Система по п. 38, в которой корреляционные данные генерируются на основании множества корреляций между множеством определенных расстояний в пикселях и множеством определенных объемов текучей среды, аспирированной в дополнительный дозирующий наконечник.
40. Система по любому из пп. 37-39, в которой аспирированная текучая среда содержит раствор красителя;
и/или причем система выполнена с возможностью определения объема аспирированной текучей среды на основании спектрофотометрии.
41. Система по любому из пп. 37-40, причем система выполнена с возможностью определения массы аспирированной текучей среды и определения объема аспирированной текучей среды на основании определенной массы аспирированной текучей среды.
42. Способ по любому из пп. 1-22, причем мешающий компонент делится на три сегмента, каждый сегмент имеет пять значений концентрации с классификационными метками НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ.
43. Система по любому из пп. 24-41, причем мешающий компонент делится на три сегмента, каждый сегмент имеет пять значений концентрации с классификационными метками НУЛЕВАЯ, СРЕДНЯЯ и ВЫСОКАЯ.
| Токарный резец | 1924 |
|
SU2016A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ИНТЕГРАЛЬНЫЙ ИЗМЕРИТЕЛЬ ДЛЯ ИССЛЕДОВАНИЯ ОБРАЗЦОВ | 2002 |
|
RU2343833C2 |

