Настоящее изобретение относится к устройству сопряжения между лабораторной автоматизированной системой и платформой для обработки расходных материалов и жидкостей в области молекулярной биологии.
Молекулярная биология является разделом биологии, который изучает живые существа на уровне общих физиологических молекулярных механизмов, сосредоточиваясь, в частности, на взаимодействиях между макромолекулами, т.е. нуклеиновыми белками и кислотами (ДНК и РНК). Молекулярная биология часто подразумевает ряд способов очистки, обработки, амплификации (ПЦР, полимеразная цепная реакция), обнаружения, исследования и копирования (клонирования) нуклеиновых кислот.
Такие операции осуществляют в узкоспециализированных лабораториях с использованием сложных устройств, которые работают с образцами биологического материала, которые предварительно надлежащим образом собраны у пациентов, таким образом, осуществляя подходящие технологические операции, перечисленные выше, чтобы достигать результата и формировать медицинский отчет.
Обычно цикл исследований этого типа может длиться даже в течение нескольких часов, поскольку очень часто необходимо ожидать завершения биохимических реакций, подлежащих осуществлению на образцах в одной из проб, что иногда требует очень длительного времени.
Известные системы имеют платформы, которые вмещают образцы биологического материала и распределяют содержимое в специальные контейнеры (обычно микротитровальные планшеты или реакционные пробирки), называемые в промышленности «расходными материалами», поскольку они представляют собой одноразовые инструменты, которые следует выбрасывать после завершения технологических операций с образцами, которые они содержат.
Разделение происходит посредством пипеток, соединенных с подходящими добавочными приспособлениями, соединенными с роботизированной рукой, которые собирают биологический образец для того, чтобы направлять его в полости (называемые лунками) упомянутых выше планшетов. Специальный набор пипеток, которые незамедлительно заменяют на другие для любой последующей операции сбора жидкости, обычно из нескольких пробирок одновременно, ассоциирован с каждой операцией сбора жидкости; таким образом, очевидно, что они также являются расходными продуктами или просто расходными материалами.
На таких платформах с образцами, уже перенесенными в планшеты, можно осуществлять другую операцию, например, такую как добавление реагентов (также посредством пипеток), центрифугирование и герметизацию планшета; они являются предварительными операциями для самого исследования во всех случаях.
В действительности, только в последний момент планшет, содержащий образцы, после предпочтительной идентификации посредством считывателя штриховых кодов, направляют в специальную автоматизированную систему для размещения и транспортировки таких планшетов в направлении других автоматизированных или исследовательских устройств, расположенных дальше по ходу.
В известных решениях возникают проблемы, поскольку они требуют обязательного присутствия оператора, который вручную загружает пробирки, обычно размещенные в специальных многолуночных контейнерах, на платформу.
Такие многолуночные контейнеры могут иметь различные размеры и, таким образом, вмещать любое число пробирок, но очевидно, что во всех случаях необходимо присутствие оператора для того, чтобы вручную загружать контейнеры один за другим, в соответствии с рабочим временем платформы. Это, в частности, не эффективно с точки зрения управления человеческими ресурсами в лаборатории, поскольку это заставляет оператора все время быть в курсе и не забывать загружать новый контейнер всякий раз, когда обработка предыдущего контейнера закончена; следовательно, оператор не может непрерывно сосредоточиваться на других лабораторных активностях.
Еще более значительный недостаток определяет тот факт, что при такой ручной загрузке пробирки остаются блокированными на платформе, в контейнерах, пока на самой платформе не будет закончена обработка всех образцов, содержащихся в едином многолуночном контейнере, т.е. до тех пор, пока оператор не сможет заменить такой контейнер новым.
Такая обработка, как указано, может длиться даже в течение нескольких часов, и это, таким образом, подразумевает существенную неэффективность и значительное увеличение времени, поскольку один контейнер идет за другим; кроме того, образцы, блокированные в платформе, помимо редких случаев, в которых из них получают биологический материал, главным образом стоят на платформе, не подвергаясь другим операциям.
Дополнительный недостаток, проистекающий из ручной загрузки, представляет собой возможность ошибки, которая имеет тяжелые последствия, проистекающие, например, из исследования «неправильного» образца.
В WO-92/05448 раскрыто устройство для пробы или проведения реакции.
В US-6358470 раскрыто устройство для введения наконечников в кончики.
Задача настоящего изобретения состоит в создании способа автоматической загрузки биологических образцов на платформу, подобную тем, которые используют в области молекулярной биологии, таким образом, освобождая от этой задачи ответственного лабораторного оператора, который тогда может сосредоточиться на других активностях, таким образом, снижая вероятность ошибок в контексте стремления к более высокой эффективности, т.е. полной лабораторной автоматизации (TLA) большинства операций.
Другими словами, задача состоит в создании автономной системы, в которой оператору только нужно настраивать часть системы, содержащую механизмы, которые осуществляют типичные молекулярно-биологические активности; когда систему запускают, вышеупомянутая часть системы должна быть способна автономно управлять движениями различных механизмов, которые составляют ее, без необходимости в каком-либо вмешательстве человека.
Другая задача состоит в создании способа, который предотвращает блокирование образцов в течение часов в платформе, несмотря на тот факт, что фактическое получение биологического материала из каждого из них, рассмотренное индивидуально, длится в действительности лишь несколько секунд. Другими словами, необходимо оптимизировать процесс получения и, таким образом, освобождать образцы от взаимодействия с платформой почти сразу после получения.
Эти и другие задачи решаются посредством способа, раскрытого в пункте 1 формулы изобретения.
Эти и другие признаки настоящего изобретения станут более понятны из нижеследующего подробного описания его варианта осуществления, представленного в качестве неограничивающего примера на сопровождающих чертежах, на которых:
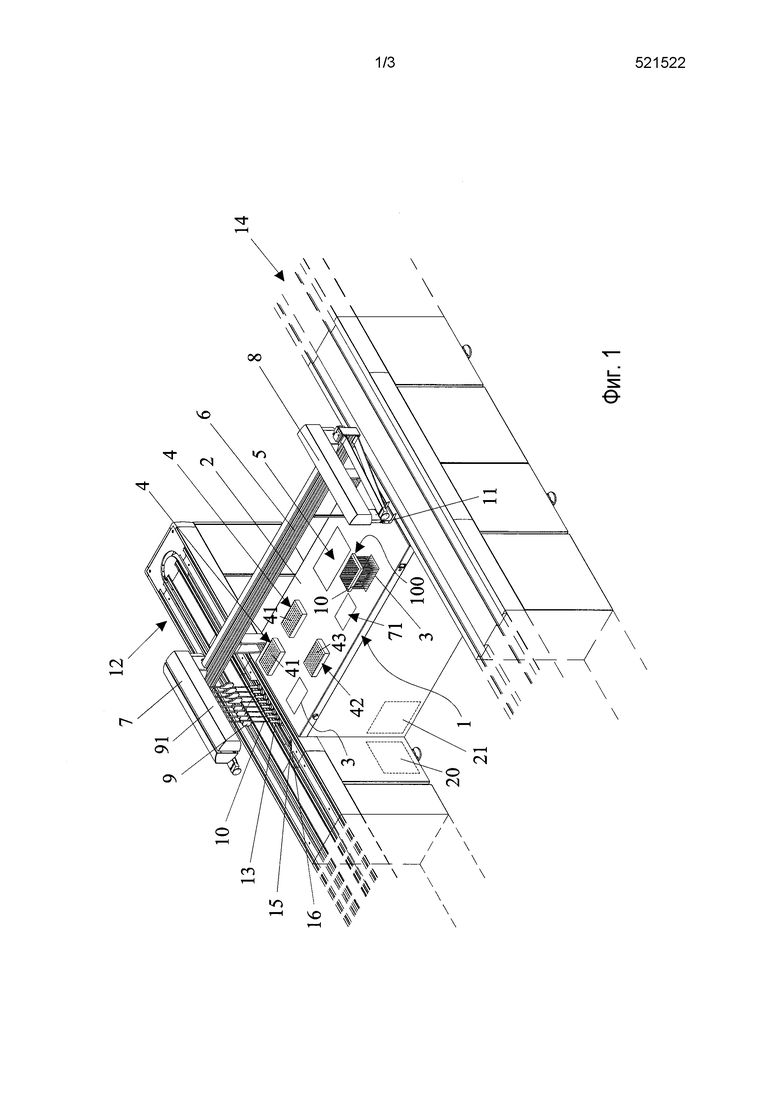
на фиг. 1 представлен вид в перспективе первого варианта осуществления устройства в соответствии с настоящим изобретением;
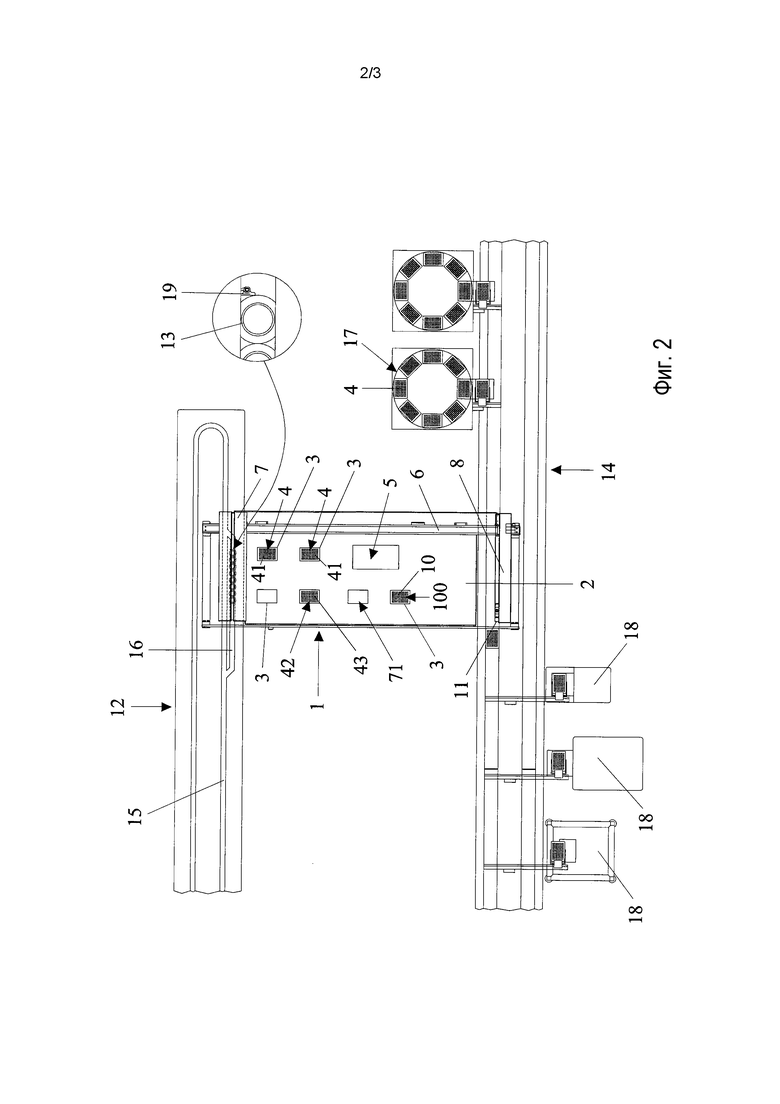
на фиг. 2 представлен вид сверху устройства на фиг. 1;
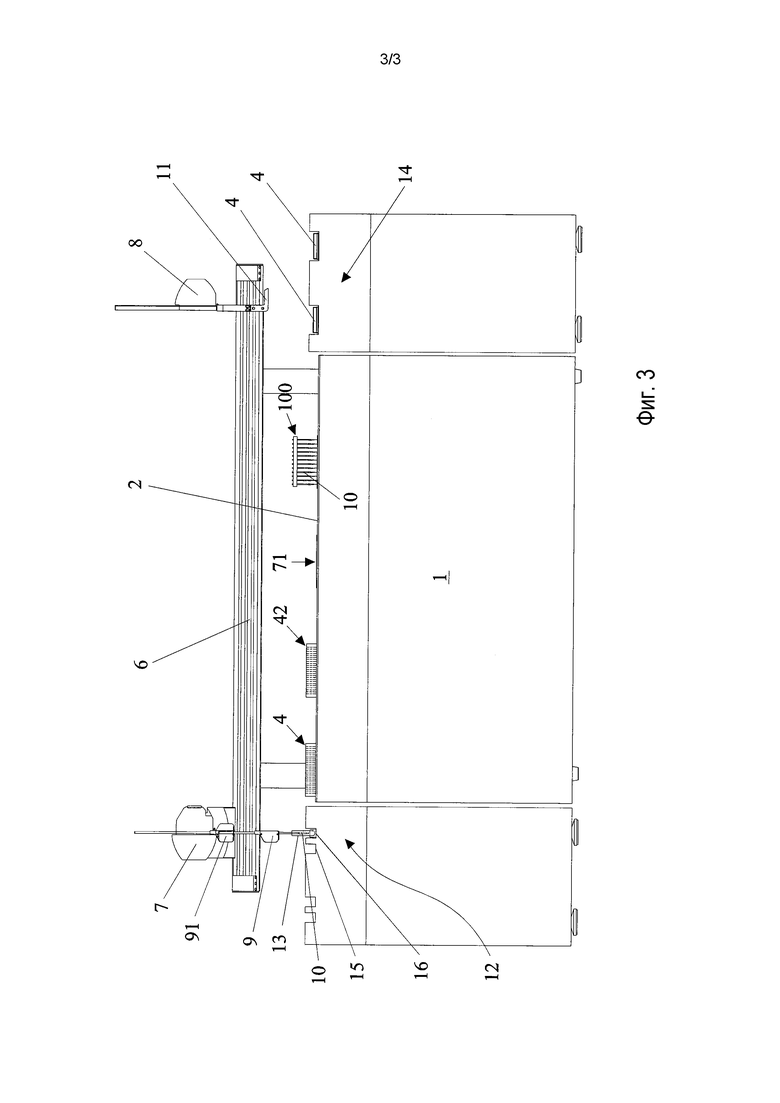
на фиг. 3 представлен вид спереди устройства на фиг. 1.
Молекулярно-биологическую платформу 1 располагают в исследовательской лаборатории.
Платформа 1 содержит поверхность 2 с рядом отсеков 3 для планшетов 4; такие отсеки 3 не все эквивалентны между собой, поскольку каждый отсек может соответствовать конкретной технологической операции с биологическим материалом, содержащимся в соответствующем планшете 4, размещенном в отсеке 3 в соответствии с положением относительно поверхности 2. На фиг. 1 некоторые отсеки 3 вмещают планшет 4, тогда как другие пусты.
Планшеты 4 содержат ряд отсеков или лунок 41, выполненных с возможностью вмещения биологического материала.
На платформе 1 дополнительно предусмотрены, также вдоль поверхности 2, некоторые устройства 5, которые могут осуществлять операции различных типов с планшетами 4, например герметизация или центрифугирование самого планшета 4.
Над платформой 1 находится горизонтальная перекладина 6, с которой сопряжены два робота 7, 8, скользящие вдоль упомянутой перекладины 6. Хватающие устройства 9, т.е. пальцы, соединены с первым роботом 7, каждый палец используют для сопряжения с пипетками 10, которые забирают или выпускают жидкости во время различных технологических этапов, как изложено более подробно ниже. Вместо этого, второй робот 8 имеет хватающее устройство 11, используемое для сопряжения с и, следовательно, транспортировки планшетов 4 и контейнеров 100 с пипетками 10, т.е. в более общем смысле расходных продуктов, вдоль платформы 1, но также на входе и выходе платформы.
Известное устройство, аналогичное платформе 1, описано в патенте EP-1627687.
Платформа 1 посредством упомянутой перекладины 6 взаимодействует как с лабораторной автоматизированной системой 12 для обработки контейнеров биологических продуктов или пробирок 13 (подобно тому, что описано в патенте EP-2225567 заявителя), так и с системой 14, используемой для перемещения расходных продуктов 4, 100. Планшеты 4, или пустые или содержащие биологический материал, выполненный с возможностью обработки и исследования посредством модуля 18 исследования, можно перемещать в системе 14.
В следующем описании авторы изобретения исследуют только взаимодействие платформы 1 с системой 12 и системой 14, имея в виду то, что больше чем одну платформу 1 можно использовать и сопрягать с больше чем одной системой 12, 14 в соответствии с рабочими объемами каждой исследовательской лаборатории, в отношении имеющегося числа биологических образцов.
Лабораторная автоматизированная система 12 содержит основную линию 15 и вторичную линию 16, вдоль которых биологические образцы, содержащиеся в пробирках 13, перенаправляют на высоту первой точки 24 перенаправления, если они должны взаимодействовать с платформой 1.
Во втором варианте осуществления автоматизированная система 12 содержит дополнительную вторичную линию 160, которая вмещает дополнительные пробирки 130, перенаправленные во второй точке 240 перенаправления для целей, которые объяснены более подробно ниже. Ультразвуковой датчик 22, который может различать уровень биологического образца, содержащегося в каждой из пробирок 130 вдоль вторичной линии 160, присутствует рядом с такой дополнительной вторичной линией 160.
Систему 14 обработки расходных материалов располагают на другой стороне платформы 1 относительно стороны, взаимодействующей с автоматизированной системой 12, с которой соединяют одну систему обработки расходных материалов или устройства 17 хранения расходных продуктов (фиг. 2), т.е. контейнеры (часто известные как «депо» в уровне техники), которые имеют полки, которые могут вмещать контейнеры 100 с пипетками 10 или пустые планшеты 4 для последующего заполнения биологическим материалом. В общем такие устройства 17 хранения, таким образом, содержат расходные продукты 4, 100, подлежащие избирательному направлению (посредством вращения вокруг вертикальной оси самого устройства и механизма для перемещения различных полок, которые образуют его), когда необходимо, в систему 14 обработки расходных материалов, чтобы их затем захватывал второй робот 8 и располагал на платформе 1.
Функционально робот 8 захватывает пустой планшет 4 и контейнер 100 с новыми пипетками 10 из системы 14, таким образом располагая их на платформе 1 в различных отсеках 3.
Пробирки 13, содержащие первичные образцы, которые необходимо получить, надлежащим образом перенаправляют в первой точке 24 перенаправления, с основной линии 15 на вторичную линию 16 автоматизированной системы 12. Первую из таких пробирок 13 останавливают посредством останавливающего затвора 19 (фиг. 2), а последующие выстроены в очередь после нее. После перенаправления необходимого числа пробирок 13 происходит активация первого робота 7, и он захватывает определенное число пипеток 10, равное числу пробирок 13, выстроенных в очередь вдоль вторичной линии 16, из отсека 3 вдоль платформы 1.
Таким образом, решение можно адаптировать к переменному числу пипеток 10, подлежащих одновременному захвату, при этом принимая во внимание, что существует максимальное число, задаваемое числом пипеток 10, которые можно размещать в одном и том же ряду контейнера, который вмещает их, и что такое число представляет собой максимальное число пробирок 13, из которых можно одновременно получать биологический материал. Стандартный размер контейнеров 10 с пипетками, подобный таковому у планшетов 4, обычно представляет собой девяносто шесть лунок, расположенных рядами по восемь. Надлежащим образом, число захватных пальцев 9, соединенных с первым роботом 7, таким образом, равно максимальному числу (т.е. восемь в варианте осуществления, представленном на фиг. 1).
Тот факт, что первый робот 7 активируют для того, чтобы содействовать захвату пипеток 10, как только достигают подходящего числа пробирок 13 вдоль вторичной линии 16, является результатом программного обеспечения, действующего между управляющей платой 20 автоматизированной системы 12 и управляющей платой 21 платформы 1.
Такое взаимодействие можно осуществлять через сеть CAN и коммуникационный протокол типа CANopen, и оно является двунаправленным, поскольку в этом случае управляющая плата 20 управляет работой платформы 1 (и, в частности, первого робота 7), и аналогичным образом, когда происходит получение, управляющая плата 21 управляет высвобождением пробирок 13, предварительно блокированных на останавливающем затворе 19 вместе с системой 12.
Более обобщенно, происходит непрерывный обмен информацией управляющими платами 20 и 21, между системой 12 и платформой 1; например, платформа 1 может требовать получения биологического материала из заданного числа первичных образцов и, таким образом, посылает запрос на перенаправление заданного числа пробирок 13 в автоматизированную систему 12 и объем образца, который нужно получить из каждой пробирки.
В свою очередь, как указано, автоматизированная система 12 информирует платформу 1, когда подходящее число пробирок 13 перенаправлено вдоль вторичной линии 16 с тем, чтобы платформа 1 могла запустить первого робота 7 и получать первичные образцы. Более подробно, подходящее количество пипеток 10 захватывают из конкретного контейнера 100 с пипетками, расположенного в одном из отсеков 3, пальцами 9 первого робота 7, который двигается вертикально и сопрягает пипетки 10. Впоследствии первый робот 7 располагают на вертикальной линии над вторичной линией 16, которая вмещает пробирки 13 с первичными образцами. Во время такого смещения пальцы 9 раскрывают в виде веера, посредством подходящего открывающего веер средства 91 с тем, чтобы каждая отдельная пипетка 10 также находилась вертикально относительно каждой остановленной пробирки 13.
В этот момент опускают пальцы 9 и получают подходящий объем образца из каждой пробирки 13 (фиг. 1).
Полученные образцы после этого транспортируют посредством первого робота 7 и выгружают в различные лунки 41 одного и того же ряда планшета 4, чтобы подвергаться новым операциям (например, добавление реагентов), управляемым частично или полностью посредством платформы 1 с этого момента времени. Реагенты в действительности содержатся на различных другом планшете 42 в другом отсеке 3.
Следует отметить, что пипетки 10 заменяют в конце каждой операции получения биологического материала или реагента; более конкретно, робот 7 сначала располагает себя над корзиной 71 платформы 1 и выгружает использованные пипетки 10 посредством приведения в действие высвобождения захватного средства пальцев 9; затем робот 7 располагает себя над контейнером 100, содержащим новые пипетки 10, и осуществляет захват пальцами 9 упомянутых новых пипеток 10.
В то же время, пробирки 13, из которых получали биологический материал, высвобождают посредством отведения останавливающего затвора 19 (как указано, благодаря передаче информации о произошедшем получении от управляющей платы 21 платформы 1 на управляющую плату 20 системы 12), и, таким образом, их можно возвращать на основную линию 15, чтобы направлять к другим точкам лабораторной автоматизированной системы 12.
По прибытии, новые пробирки 13, из которых нужно получить биологический материал, перенаправляют вдоль вторичной линии 16, и их содержимое получают посредством новых пипеток 10, в то же время захватываемых пальцами 9, и выгружают в лунки 41, относящиеся к следующему ряду планшета 4.
Как уже отмечено, один из отсеков 3, распложенных на основании платформы 1, в известных решениях предназначен для размещения планшетов 42 с лунками 43, содержащими другой реагент, который добавляют в образцы биологического материала, вновь выгруженные в лунки 41 планшета 4; это приводит к протеканию заданных химических реакций с биологическим образцом, в частности, чтобы способствовать отделению молекул ДНК, подлежащих анализу, после того как планшет 4 направляют в подходящие устройства 18, расположенные дальше по ходу по отношению к системе 14 обработки планшетов.
Когда такие лунки 43 реагента уже сначала расположены на платформе 1, в известных решениях возможна только обработка партиями, поскольку количество реагента в лунках 43 калибруют так, чтобы оно было достаточным для определенного числа образцов, предпочтительно кратно максимальному числу пробирок 13, из которых можно одновременно получать биологический материал, как описано выше.
Полагая, что имеют место восемь таких образцов, обработка партиями может подразумевать количество реагента, достаточное, например, для двадцати четырех образцов, т.е. для трех последующих циклов получения.
Это в особенности неудобно в случае, когда число первичных пробирок 13, из которых получают биологические образцы, выше, чем это число, поскольку после завершения операции обработки первых двадцати четырех образцов нет реагента для последних двух, и, следовательно, необходимо ждать нового ручного заполнения лунок 43 реагента оператором, которое может произойти только в конце рабочего цикла платформы 1, который, как отмечено, может длиться часами.
Взаимодействие между лабораторной автоматизированной системой 12 и платформой 1 также позволяет преодолеть это ограничение на обработку партиями, поскольку возможно делать пробирки 13, перемещающиеся по системе 12, также заполненными реагентом вместо биологического материала; следовательно, реагент можно получать аналогичным образом, как описано выше, для первичных образцов, посредством перенаправления подходящего числа пробирок 13 реагента вдоль вторичной линии 16. Тем самым, возможно добавлять калиброванное количество реагента в фактическое число пробирок 13, из которых получают биологические образцы, без необходимости обработки партиями.
Второй вариант осуществления, напротив, относится к так называемым процедурам объединения, которые подразумевают совместное использование биологических образцов от различных индивидуумов в одной пробирке.
Это ведет к созданию банков крови для сбора настолько различных образцов, насколько возможно, в небольшом числе пробирок, для которых осуществляют первый приблизительный анализ, касающийся присутствия конкретных вирусов, таких как вирус иммунодефицита человека (HIV), вирус папилломы человека (HPV) или вирус простого герпеса (HSV).
В дополнение к обычным повседневным лабораторным анализам, эту процедуру с достижением преимущества применяют к предварительному исследованию, которое осуществляют для образцов от отдельных доноров крови (или к другому биологическому материалу).
В действительности, хорошо известно, что присутствие вышеупомянутых вирусов в общем довольно редко обнаруживают в обычных повседневных лабораторных анализах и тем более у индивидуумов, которые выражают свое желание сдавать кровь и, следовательно, считаются здоровыми; следовательно, предпочтительно направлять пробирку, содержащую биологические образцы, также от нескольких различных индивидуумов, смешанные вместе, в специальный модуль исследования для обнаружения вирусов таких типов. Это экономит время и ресурсы посредством обеспечения совместного образца, подлежащего исследованию посредством пробы в модуле, и таким образом быстро позволяет достичь определенности в том, что в случае отрицательного результата ни один из индивидуумов, образцы которых находятся в пробирке, не имеет вышеупомянутый вирус(ы).
Таким образом, предварительный скрининг на присутствие таких заданных вирусов проводят значительно быстрее, чем при выделении отдельной пробирки для каждого образца. Естественно, в случае положительного ответа, нужно незамедлительно назначать осуществление более детальных исследований, в этот раз для отдельных пробирок, по одной для каждого образца из тех, которые образуют предыдущую смешанную пробирку, чтобы выяснить, какие образцы, т.е. какие индивидуумы, имеют обнаруженный вирус. Автоматизированная система 12 может управлять ситуациями этого уровня важности, направляя образцы, подлежащие более глубокому анализу, в направлении подходящих модулей, расположенных в лаборатории, вдоль пути самой системы 12.
Для осуществления такой процедуры объединения заданное число устройств обработки, содержащих пустые пробирки 130 («дочерние пробирки»), перенаправляют вдоль дополнительной вторичной линии 160, во второй точке 240 перенаправления. В проиллюстрированном варианте осуществления такое число снова равно восьми, в соответствии с числом пипеток 10 платформы 1, по причинам, которые будут проиллюстрированы ниже. Также в этом случае очевидно, что первую из таких пустых пробирок 130, перенаправленных вдоль вторичной линии 160, останавливают посредством останавливающего затвора 190 и следующие пробирки выстроены в очередь после нее.
При этом, подобным образом, описанным выше в первом варианте осуществления, устройства обработки (снова восемь в этом варианте осуществления), содержащие полные пробирки 13 («материнские пробирки»), каждая из которых транспортирует биологический образец только от одного пациента, перенаправляют вдоль вторичной линии 16.
После этого биологический материал, содержащийся в материнских пробирках 13, получают, как и выше, с использованием пипеток 10, которые в этот момент выгружают в соответствующие дочерние пробирки 130, выстроенные пустыми и ждущие вдоль вторичной линии 160, вместо выгрузки на планшеты 4 платформы 1.
В конце такой операции материнские пробирки 13 высвобождают посредством отведения останавливающего затвора 19. Затем, когда восемь новых устройств обработки дополнительно перенаправлены вдоль вторичной линии 16 и ожидают остановленными на затворе 19, снова получают содержимое посредством других пипеток 10, и выгружают в те же дочерние пробирки 130, которые в то же время не высвобождены, в отличие от предыдущей партии материнских пробирок 13.
Следовательно, дочерние пробирки 130 постепенно заполняют при добавлении каждого заданного количества биологического материала из взаимно различных материнских пробирок 13 (и, таким образом, индивидуумов) для каждого цикла. Таким образом, результатом этого является то, что каждая дочерняя пробирка 130 содержит полный образец, который представляет собой простую смесь равного числа образцов из различных материнских пробирок 13.
Ультразвуковой датчик 22 активируют в конце каждой операции выгрузки биологического материала из материнских пробирок 13 в дочерние пробирки 130 для того, чтобы обнаруживать уровень наполнения каждой дочерней пробирки 130 каждый раз до тех пор, пока не будет сформирован сигнал «полная пробирка» после заданного числа операций наполнения, за которыми следует выпуск дочерних пробирок 130 посредством останавливающего затвора 190; следовательно, пробирки возвращают вдоль основной линии 15 автоматизированной системы 12, чтобы затем направлять их в подходящие модули, используемые для того, чтобы идентифицировать присутствие заданных вирусов, таких как, как отмечено, HIV, HPV или HSV, в смешанных образцах, содержащихся в таких дочерних пробирках 130.
Полагая, что дочернюю пробирку 130 заполняют только после выгрузки содержимого шестнадцати различных материнских пробирок 13, очевидно, что каждая из дочерних пробирок 130, 90 содержит образцы от шестнадцати различных индивидуумов, когда их наконец высвобождают от останавливающего затвора 1; кроме того, поскольку каждый входящий образец ассоциирован с отличающимся индивидуумом, всего при каждом выпуске восьми дочерних пробирок 130 будет 16×8=128 индивидуумов. Следовательно, легко понять, как, направив их в модули исследования на HIV, HPV или HSV, такие дочерние пробирки 130 со смешанными образцами позволяют комбинировать пробы (по меньшей мере в отношении предварительного скрининга) для высокого числа индивидуумов, таким образом экономя время и ресурсы.
Один из инновационных аспектов в соответствии с настоящим изобретением, таким образом, представляет собой возможность получения биологических образцов или реагентов (подлежащих направлению к молекулярно-биологической платформе 1, или только в случае образцов - к другим пробиркам 130, ожидающим вдоль объединяющей линии) из пробирок 13, которые, если необходимо, перенаправляют вдоль вторичной линии 16 автоматизированной системы 12 и затем освобождают после нескольких мгновений от вышеупомянутого получения, которые способны возвращаться в цикл вдоль системы 12 и возможно незамедлительно направляться в новые автоматизированные модули или пробы, которые взаимодействуют с самой системой 12.
Следовательно, пробирки 13 никогда не покидают автоматизированную систему 12; этого не происходит в известных решениях, в которых пробирки, содержащие биологический материал, размещают в больших количествах в специальном контейнере, который затем оператор вручную вставляет на платформу 1. Таким образом, недостаток состоит в том, что все число пробирок должно ожидать на платформе 1 завершения рабочего цикла, прежде чем их оператор вновь вручную удалит и заменит другими. Это предполагает, что первые пробирки, из которых следует получить биологический материал, во всех случаях ожидают операций, подлежащих осуществлению для последних пробирок, расположенных в том же контейнере, таким образом, последующих технологических операций, подлежащих осуществлению для полученного образца, а не только операции получения, что может длиться часами. Аналогичным образом, последние, несмотря на то, что прибывают последними, остаются остановленными на платформе прежде уже в течение длительного времени, т.е. пока получают первые. Вкратце, в известных решениях, помимо нескольких мгновений, во время которых получают образец, пробирки остаются стоящими без дела на платформе 1.
Предпочтительно взаимодействие платформы 1 с автоматизированной системой 12 позволяет объединять пробирки 13, также содержащие реагенты, с образцами биологического материала с тем, чтобы протекали заданные химические реакции в лунках 41 планшетов 4, перемещаясь по системе. Необходимый реагент, таким образом, становится постепенно доступным на платформе 1, только когда необходим. Это позволяет преодолеть предел, представленный необходимостью обработки партиями пробирок, который вытекает из факта наличия фиксированного количества реагентов в платформе 1, которого также достаточно для предварительно определяемого числа образцов.
В общем автоматизация рабочего процесса в решении в соответствии с настоящим изобретением выше, поскольку более не требуется присутствие оператора, чтобы вручную заменять контейнер пробирок 13, для которого завершена обработка, на новый, подлежащий обработке на платформе 1. Следовательно, оно представляет собой автономную систему, в которой оператор может, одним словом, удалиться от задействованных механизмов и сосредоточиться на других задачах в исследовательской лаборатории. Предпочтительно имеет место значительное снижение или полное устранение ошибок, обусловленных ручными повторяющимися операциями оператора.
Это попадает в контекст все более насущного стремления к полной автоматизации лаборатории (TLA) и, таким образом, к более высокой эффективности исследовательской лаборатории, в которой осуществляют операции, связанные с молекулярной биологией, таким образом по существу устраняя возможность человеческой ошибки.
Таким образом, созданное изобретение допускает многие изменения и варианты, все из которых находятся в рамках объема изобретательского замысла.
На практике используемые материалы, а также формы и размеры могут быть любыми, в соответствии с необходимостью.
Предложенное изобретение относится к средствам сопряжения между лабораторной автоматизированной системой и платформой для обработки расходных материалов и жидкостей в области молекулярной биологии. Предложен способ для автоматического заполнения лунок (41) планшетов (4) биологическим материалом из лабораторной автоматизированной системы (12) для транспортировки биологических образцов или реагентов, содержащихся в пробирках (13), и автоматического направления упомянутых планшетов (4) в направлении обрабатывающих модулей (18) для упомянутого биологического материала. Указанный способ реализуется при помощи платформы (1), расположенной между упомянутой лабораторной автоматизированной системой (12) и системой (14) обработки расходных продуктов (4, 42, 100), которая содержит горизонтальную перекладину (6), на которой с возможностью скольжения установлены первый робот (7) и второй робот (8), причем первый робот (7) оснащен захватным средством (9) для пипеток (10), выполненным с возможностью получения и выпуска биологического материала или реагента, и второй робот (8) оснащен захватным средством (11) для расходных продуктов (4, 42, 100). Данное изобретение позволяет реализовать способ для автоматической загрузки биологических образцов на платформу, в котором снижена вероятность ошибок переноса образцов биологического продукта. 1 з.п. ф-лы, 3 ил.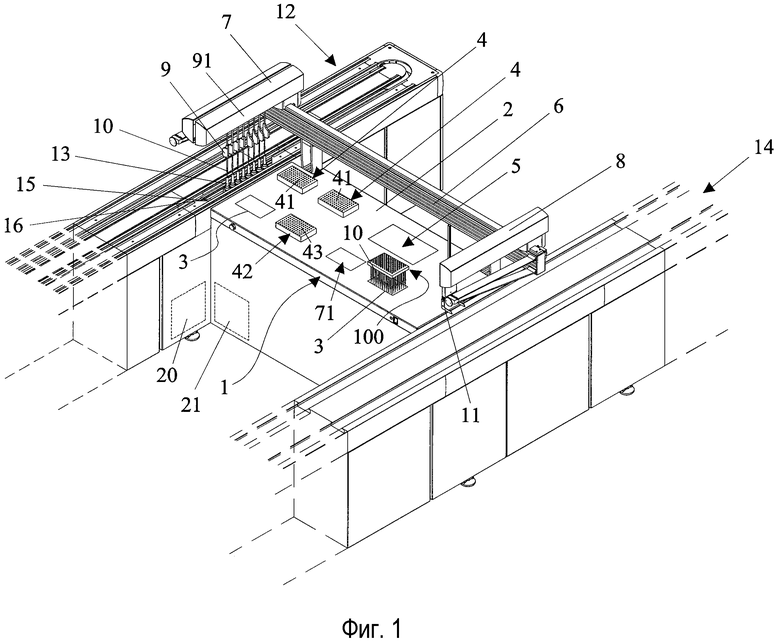
1. Способ автоматического переноса биологического материала из лабораторной автоматизированной системы (12) для транспортировки множества отдельных пробирок (13), содержащих биологический материал, в систему (14) обработки для планшетов (4) с лунками (41) с биологическим материалом, подлежащим анализу,
отличающийся тем, что способ содержит следующие этапы, на которых:
в упомянутой лабораторной автоматизированной системе (12) транспортируют множество отдельных пробирок (13), содержащих реагенты для биологического материала, подлежащего анализу,
перенаправляют множество отдельных пробирок (13), содержащих биологический материал, подлежащий анализу, из основной линии (15) на вторичную линию (16) упомянутой лабораторной автоматизированной системы (12),
перенаправляют множество отдельных пробирок (13), содержащих реагенты для упомянутого биологического материала, подлежащего анализу, из основной линии (15) на вторичную линию (16) упомянутой лабораторной автоматизированной системы (12),
линейно выстраивают в очередь множество отдельных пробирок (13), содержащих биологический материал, подлежащий анализу, и множество отдельных пробирок (13), содержащих реагенты для упомянутого биологического материала, подлежащего анализу, в точке (19) получения упомянутой вторичной линии (16),
обеспечивают платформу (1), расположенную между лабораторной автоматизированной системой (12) и системой (14) обработки, причем упомянутая платформа (1) вмещает планшеты (4) и контейнеры (100) со множеством новых пипеток (10) и содержит горизонтальную перекладину (6), на которой первый робот (7) и второй робот (8) установлены с возможностью скольжения,
посредством упомянутого первого робота (7) захватывают линейную последовательность новых пипеток (10) из контейнера (100) с множеством новых пипеток (10), размещенного на упомянутой платформе (1),
посредством линейной последовательности выбранных пальцев (9) для выбранных пипеток (10) перемещают упомянутую линейную последовательность пипеток (10) над соответствующими пробирками (13), линейно выстроенными в очередь в точке (19) получения лабораторной автоматизированной системы (12), получают биологический материал или реагент из упомянутых пробирок (13) после опускания упомянутых пальцев (9) в упомянутые пробирки (13), транспортируют полученный биологический материал или реагент над лунками (41) планшета (4), содержащегося в отсеке (3) платформы (1), выгружают полученный биологический материал или реагент в упомянутые лунки (41) планшета (4) и выгружают использованные пипетки (10) в корзину (71) платформы (1),
посредством упомянутого второго робота (8) захватывают планшеты (4), лунки (41) которых заполнены биологическим материалом, подлежащим анализу, и перемещают их в упомянутую систему (14) обработки, захватывают планшеты (4) с пустыми лунками (41) из системы (14) обработки и перемещают их в отсеки (3) платформы (1), захватывают контейнеры (100) с множеством новых пипеток (10) из системы (14) обработки и перемещают их в отсеки (3) платформы (1),
причем упомянутая платформа (1) также оснащена управляющей платой (21), взаимодействующей с управляющей платой (20) лабораторной автоматизированной системы (12), таким образом, чтобы число пипеток (10), подлежащих захвату пальцами (9) первого робота (7), равнялось, самое большее, числу пробирок (13), линейно выстроенных в очередь в точке (19) получения лабораторной автоматизированной системы (12).
2. Способ по п. 1, отличающийся получением биологического материала из пробирок (13), выстроенных в очередь в первой остановочной линии (16) лабораторной автоматизированной системы (12), и выгрузкой упомянутого полученного биологического материала в пустые пробирки (130), выстроенные в очередь во второй остановочной линии (160) лабораторной автоматизированной системы (12), причем более чем один образец биологического материала вносят в одну и ту же пробирку (130), выстроенную в очередь в упомянутой второй остановочной линии (160).
| Колосоуборка | 1923 |
|
SU2009A1 |
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| US 6358470 B1, 19.03.2002 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

