ОПИСАНИЕ
Данное изобретение исходит из регулировочного устройства для регулировки блока гидравлического цилиндра,
- причем регулировочное устройство имеет регулятор, который на входе принимает относящуюся к поршню блока гидравлического цилиндра расчетную величину и относящуюся к поршню блока гидравлического цилиндра фактическую величину и на основе разности расчетной величины и фактической величины определяет предварительную регулирующую величину для блока управления клапаном блока гидравлического цилиндра,
- причем за регулятором расположен блок линеаризации, который умножает предварительную регулирующую величину на коэффициент линеаризации и выдает умноженную на коэффициент линеаризации предварительную регулирующую величину в качестве окончательной регулирующей величины в блок управления клапаном, так что фактическая величина приводится к расчетной величине со скоростью регулирующего воздействия.
Альтернативно данное изобретение исходит из регулировочного устройства для регулировки блока гидравлического цилиндра,
- причем регулировочное устройство имеет выполненный в виде П-регулятора регулятор, который на входе принимает управляющую величину, на основе управляющей величины определяет регулирующую величину для блока управления клапаном блока гидравлического цилиндра и выдает регулирующую величину в блок управления клапаном, так что относящаяся к поршню блока гидравлического цилиндра фактическая величина приводится к относящейся к поршню расчетной величине со скоростью регулирующего воздействия,
- причем перед регулятором расположен блок линеаризации, который принимает расчетную величину и фактическую величину, их разность умножает на коэффициент линеаризации и умноженную на коэффициент линеаризации разность выдает в качестве управляющей величины в регулятор.
Блоки гидравлических цилиндров обнаруживают регулировочную характеристику, которая сильно зависит от рабочей точки блока гидравлического цилиндра. Регулятор для блока гидравлического цилиндра, который был оптимизирован для определенной рабочей точки, работает в других рабочих точках не так хорошо или и вовсе плохо.
Для улучшения регулировочной характеристики в уровне техники согласно WO 2009/056 378 A2 известно располагать перед или за регулятором блок линеаризации. Блок линеаризации из WO 2009/056 378 A2 в динамике назначает коэффициент линеаризации в виде функции фактического положения поршня, преобладающих с обеих сторон от поршня рабочих давлений, а также преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений. Блок линеаризации назначает коэффициент линеаризации таким образом, что соотношение скорости регулировки фактической величины к разности между расчетной величиной и фактической величиной не зависит от фактического положения поршня, преобладающих с обеих сторон от поршня рабочих давлений и преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений.
Порядок действий согласно WO 2009/056 378 A2 уже представляет собой значительный шаг вперед. Тем не менее, на практике обнаружилось, что даже этот порядок действий еще подвержен недостаткам.
Один недостаток заключается в том, что рабочие давления с обеих сторон от поршня используются как в гидравлической системе, так и в линеаризации. И хотя линеаризация компенсирует эффекты в гидравлической системе, тем не менее, запаздывает из-за блока управления клапаном. Вследствие этого, например регулирующая величина, которая должна вызывать увеличение усилия, создает меньшее увеличение усилия, чем ожидалось. Отклонение от ожидаемого увеличения усилия тем больше, чем больше регулирующая величина (ошибка запаздывания). В результате регулировка имеет пониженную динамику.
Дальнейший недостаток заключается в том, что регулирующая величина, которая перемещает поршень блока гидравлического цилиндра с определенной скоростью, модулируется линеаризацией посредством изменений усилия (изменений давления). Подобная модуляция соответствует положительному возврату усилия (положительная обратная связь, положительная регенерация). В результате регулировка дестабилизируется.
Задача данного изобретения состоит в создании возможностей, при помощи которых устраняются недостатки уровня техники.
В первую очередь задача решается с помощью регулировочного устройства с признаками пункта 1 формулы изобретения.
Согласно изобретению регулировочное устройство указанного вначале типа усовершенствуется вследствие того, что
- на основе преобладающих с обеих сторон от поршня рабочих давлений и/или преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений, а также на основе оказываемого поршнем расчетного усилия поршня блок линеаризации определяет расчетные значения для преобладающих с обеих сторон от поршня рабочих давлений, и
- блок линеаризации в динамике назначает коэффициент линеаризации в виде функции фактического положения поршня, функции расчетных значений для преобладающих с обеих сторон от поршня рабочих давлений, а также функции преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений.
Согласно изобретению коэффициент линеаризации определяется в итоге, основываясь не на самих преобладающих с обеих сторон от поршня рабочих давлениях, а, основываясь на расчетных значениях для рабочих давлений, которые определяются из рабочих давлений в сочетании с расчетным усилием поршня. Предпочтительно блок линеаризации назначает коэффициент линеаризации таким образом, что соотношение скорости регулировки фактической величины к разности между расчетной величиной и фактической величиной не зависит от фактического положения поршня, преобладающих с обеих сторон от поршня рабочих давлений и преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений.
В принципе регулятор может быть выполнен в виде любого регулятора. Тем не менее, во многих случаях достаточно, если регулятор выполнен в виде П-регулятора (=пропорционального регулятора).
В частном случае, если регулятор выполнен в виде П-регулятора, очередность регулятора и блока линеаризации может меняться. Следовательно, соответствующий изобретению вариант осуществления должен адаптироваться вследствие того, что в этом случае блок линеаризации умножает разность расчетной величины и фактической величины на коэффициент линеаризации и умноженную на коэффициент линеаризации разность подает в регулятор в качестве его входной величины. Однако способ определения коэффициента линеаризации остается неизменным.
Возможно, что расчетной величиной и фактической величиной являются положения поршня блока гидравлического цилиндра. В этом случае регулировочное устройство предпочтительно определяет расчетное усилие поршня на основе собственного усилия и перестановочного усилия, причем собственное усилие задано собственным весом перемещенной поршнем массы, и регулировочное устройство определяет перестановочное усилие на основе выданной регулятором величины, из которой посредством фильтрации определяется предварительная или окончательная регулирующая величина. В случае позиционного регулятора этот вариант осуществления приводит к простой и надежной конструкции регулятора.
Альтернативно возможно, что расчетной величиной является расчетное усилие нагрузки, а фактической величиной является оказанное блоком гидравлического цилиндра на нагрузку фактическое усилие нагрузки. В этом случае регулировочное устройство предпочтительно определяет расчетное усилие поршня на основе собственного усилия и расчетной величины, причем собственное усилие задано собственным весом перемещенной поршнем массы.
Предпочтительно в упомянутом последним случае регулировочное устройство на основе собственного усилия и расчетной величины определяет расчетное значение усилия, а затем при помощи блока задержки расчетное усилие поршня посредством задержки расчетного значения усилия. Блок задержки может быть выполнен, например, в виде PT1-блока (передаточного блока, который имеет пропорциональную характеристику передачи с задержкой 1-го порядка), PT2-блока (задержка 2-го порядка), модуля времени запаздывания и тому подобного. Исполнение в виде PT2-блока предпочтительно.
Расчетное усилие поршня предоставляет согласно формуле:

условие для определения расчетных значений. FKL - это расчетное усилие поршня. pA* и pB* - это расчетные значения преобладающих с обеих сторон от поршня рабочих давлений. AKA и AKB - это в каждом случае эффективные рабочие поверхности. Однако для однозначного определения расчетных значений pA* и pB* требуется дальнейшее уравнение. На практике оказалось благоприятным, если регулировочное устройство определяет расчетные значения для преобладающих с обеих сторон от поршня рабочих давлений таким образом, что сумма расчетных значений равна линейной комбинации из суммы преобладающих с обеих сторон от поршня рабочих давлений и суммы преобладающих со стороны входа и выхода блока управления клапаном рабочих давлений. Таким образом, если ссылочными позициями pA и pB обозначены преобладающие с обеих сторон от поршня рабочие давления, а ссылочными позициями pP и pT преобладающие со стороны входа и выхода блока управления клапаном рабочие давления, то в дополнение к вышеуказанному уравнению далее предпочтительно справедлива формула:

α - это поправочный коэффициент, который находится между 0 и 1. Сами пределы, то есть значения 0 и 1, могут также приниматься.
Кроме того, на практике доходит до более стабильной линеаризации, если регулировочное устройство ограничивает расчетные значения для преобладающих с обеих сторон от поршня рабочих давлений значениями между преобладающими со стороны входа и выхода блока управления клапаном рабочими давлениями.
Дальнейшая мера, которая способствует стабилизации линеаризации, заключается в том, что регулировочное устройство сглаживает преобладающие с обеих сторон от поршня рабочие давления перед определением расчетных значений для преобладающих с обеих сторон от поршня рабочих давлений. Постоянная времени, с которой происходит сглаживание, может находиться, например между 10 мс и 1000 мс, предпочтительно между 30 мс и 300 мс. В частности значение приблизительно в 100 мс оказалось предпочтительным.
Регулировочное устройство может быть выполнено в виде структуры аппаратных средств. Однако предпочтительно оно выполнено в виде программируемого программным обеспечением регулировочного устройства и запрограммировано программным модулем, так что оно ввиду программирования программным модулем выполнено в виде соответствующего изобретению регулировочного устройства.
Программный модуль включает в себя машинный код, выполнение которого присоединенным к блоку гидравлического цилиндра, программируемым программным обеспечением регулировочным устройством вызывает то, что регулировочное устройство выполнено в виде соответствующего изобретению регулировочного устройства. Программный модуль может быть сохранен на носителе данных в пригодном для машинного считывания виде (в частности в электронном виде).
Описанные выше свойства, признаки и преимущества этого изобретения, а также способ их достижения становятся более ясно и явно понятными в связи с последующим описанием примеров осуществления, которые разъясняются более подробно в сочетании с чертежом. При этом на схематичном изображении показаны:
фиг. 1 - блок-схема регулировочного устройства и блока гидравлического цилиндра;
фиг. 2 - первый вариант осуществления регулировочного устройства;
фиг. 3 - второй вариант осуществления регулировочного устройства;
фиг. 4 - определительное устройство блока линеаризации;
фиг. 5 - возможный вариант осуществления регулировочного устройства в случае регулировки положения;
фиг. 6 - возможный вариант осуществления регулировочного устройства в случае регулировки усилия;
фиг. 7 - возможный вариант осуществления определителя расчетных значений;
фиг. 8 - дальнейший возможный вариант осуществления определителя расчетных значений; и
фиг. 9 - определитель расчетных значений и сглаживающие блоки.
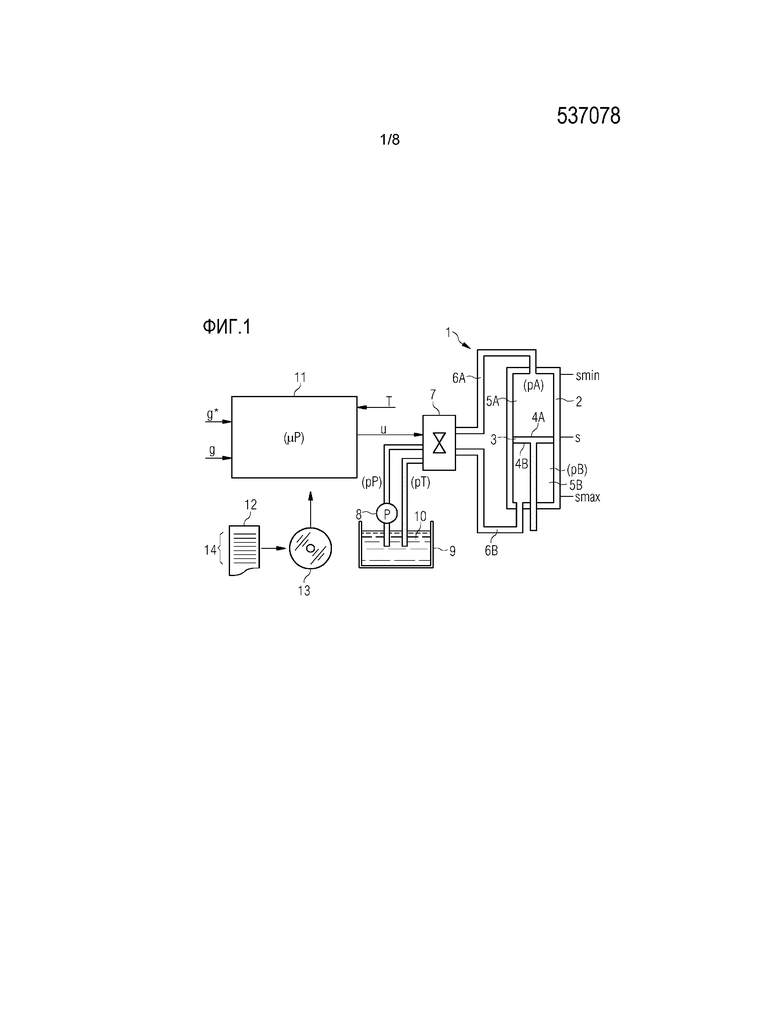
Согласно фиг. 1 блок 1 гидравлического цилиндра имеет гидравлический цилиндр 2, в котором поршень 3 установлен с возможностью перемещения. Поршень 3 может перемещаться внутри гидравлического цилиндра 2 между минимальным положением smin и максимальным положением smax. Таким образом, в любой момент времени он находится в фактическом положении s, которое находится между минимальным положением smin и максимальным положением smax.
Поршень 3 имеет первую рабочую поверхность 4A и вторую рабочую поверхность 4B. Каждая рабочая поверхность 4A, 4B обращена к соответствующему рабочему объему 5A, 5B.
Рабочие объемы 5A, 5B гидравлически соединены через гидравлические линии 6A, 6B и блок 7 управления клапаном с гидравлическим насосом 8 и гидравлическим резервуаром 9. Гидравлические линии 6A, 6B проходят от соответствующего рабочего объема 5A, 5B до блока 7 управления клапаном.
Если поршень 3 находится в своем минимальном положении smin, то в гидравлической линии 6A находится определенный объем гидравлической жидкости 10. Этим объемом является минимальное количество гидравлической жидкости 10, которое находится между блоком 7 управления клапаном и рабочей поверхностью 4A поршня 3. Это количество гидравлической жидкости 10 является минимально возможным эффективным объемом для рабочего объема 5A. В дальнейшем он обозначается ссылочной позицией VminA.
Аналогичным образом в гидравлической линии 6B находится определенное количество гидравлической жидкости 10, если поршень 3 находится в своем максимальном положении smax. Это количество гидравлической жидкости 10 представляет собой минимально возможный эффективный объем для рабочего объема 5B. В дальнейшем этот минимальный объем обозначается ссылочной позицией VminB.
Если поршень 3 находится в произвольном фактическом положении s, то рабочий объем 5A имеет эффективное значение VA объема, которое получается из:

Ссылочной позицией AKA обозначено значение площади обращенной к рабочему объему 5A рабочей поверхности 4A поршня 3.
Возможно делить эффективный объем VA на значение AKA площади. Частное:

соответствует эффективной высоте столба гидравлической жидкости 10 над поршнем 3.
Аналогичным образом на основе минимально возможного эффективного объема VminB для рабочего объема 5B, значения AKB площади обращенной к рабочему объему 5B рабочей поверхности 4B, фактического положения s и максимального положения smax согласно формулам:

и

могут определяться соответствующие значения VB и hB для второй рабочей поверхности 4B или второго рабочего объема 5B.
В рабочем объеме 5A преобладает первое рабочее давление pA, во втором рабочем объеме 5B второе рабочее давление pB. Гидравлическим насосом 8 гидравлическая жидкость 10 нагружается давлением pP насоса. В гидравлическом резервуаре 9 преобладает давление pT резервуара. Давление pP насоса соответствует рабочему давлению, преобладающему со стороны входа блока 7 управления клапаном. Давление pT резервуара соответствует рабочему давлению, преобладающему со стороны выхода блока 7 управления клапаном.
Блок 7 управления клапаном выполнен в данном случае в виде четырехходового клапана. При помощи четырехходового клапана каждый из обоих рабочих объемов 5A, 5B может альтернативно соединяться с насосом 8 или с гидравлическим резервуаром 9. Альтернативно блок 7 управления клапаном мог бы быть выполнен в виде двухходового клапана. В этом случае один из обоих рабочих объемов 5A, 5B нагружался бы постоянным давлением, например половиной давления pP насоса. В этом случае другой из рабочих объемов 5A, 5B может альтернативно соединяться с насосом 8 или с гидравлическим резервуаром 9.
Блок 7 управления клапаном и с ним весь блок 1 гидравлического цилиндра управляется регулировочным устройством 11. Регулировочное устройство 11 выполнено предпочтительно согласно фиг. 1 в виде программируемого программным обеспечением регулировочного устройства 11. Следовательно, регулировочное устройство 11 программируется программным модулем 12. Программный модуль 12 может загружаться в регулировочное устройство 11, например, при помощи носителя 13 данных, на котором программный модуль 12 сохранен в пригодном для машинного считывания виде. В качестве носителя 13 данных рассматривается в принципе любой носитель данных. На фиг. 1 (чисто в качестве примера) изображен CD-ROM 13.
Программный модуль 12 включает в себя машинный код 14, который может выполняться регулировочным устройством 11. Выполнение машинного кода 14 регулировочным устройством 11 вызывает то, что регулировочное устройство 11 управляет блоком 1 гидравлического цилиндра так, как это будет разъясняться далее более подробно. Программирование регулировочного устройства 11 программным модулем 12 является причиной соответствующего исполнения регулировочного устройства 11.
Согласно фиг. 1 сначала в регулировочное устройство 11 подаются относящаяся к поршню 3 блока 1 гидравлического цилиндра расчетная величина g* и относящаяся к поршню 3 блока 1 гидравлического цилиндра фактическая величина g. Расчетной величиной g* и фактической величиной g, как правило, являются положения поршня 3 или действующие на поршень 3 усилия. На основе расчетной величины g* и фактической величины g регулировочное устройство 11 разъясняемым в дальнейшем образом определяет регулирующую величину u для блока 7 управления клапаном и выдает регулирующую величину u в блок 7 управления клапаном. Вследствие этого регулировочное устройство 11 осуществляет управление блоком 1 гидравлического цилиндра (точнее: поршнем 3).
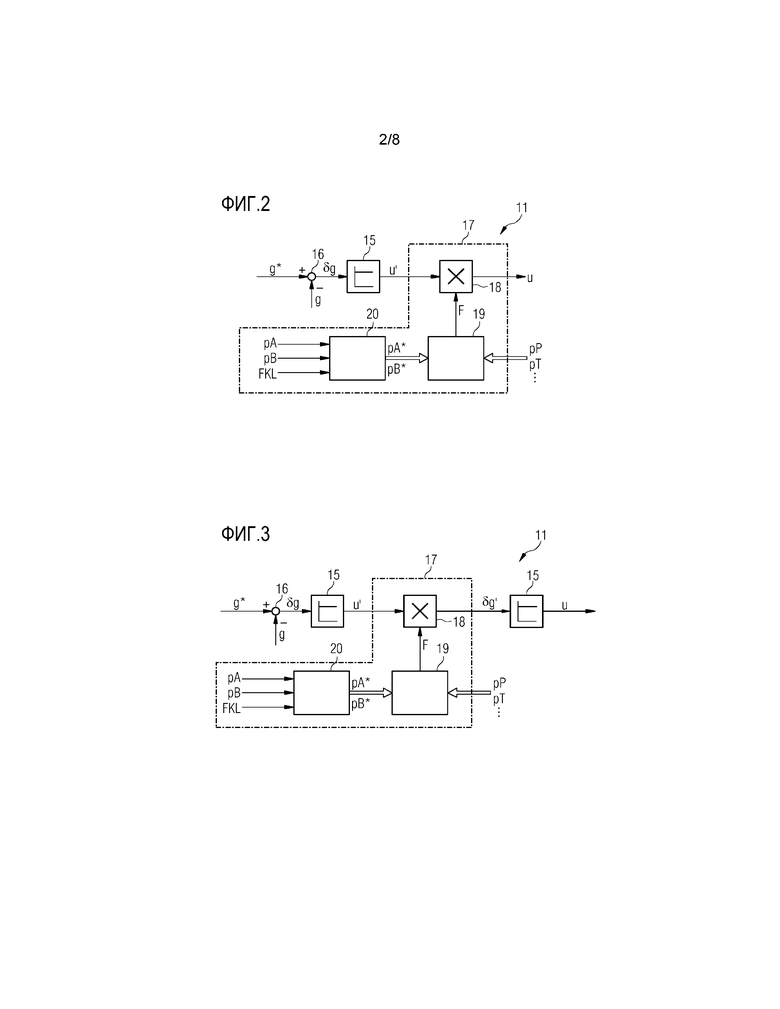
Предпочтительно регулировочное устройство 11 выполнено согласно фиг. 2. Согласно фиг. 2 регулировочное устройство 11 имеет регулятор 15, который на входе принимает расчетную величину g* и фактическую величину g. В узловой точке 16 образуется разность δs расчетной величины g* и фактической величины g. В дальнейшем эта разность обозначается как регулировочная разность δg.
Регулировочная разность δg подается в регулятор 15, который на основе регулировочной разности δg определяет предварительную регулирующую величину u` для блока 7 управления клапаном. Согласно фиг. 2 регулятор 15 предпочтительно выполнен в виде П-регулятора.
За регулятором 15 расположен блок 17 линеаризации. Блок 17 линеаризации имеет блок 18 умножения и определительное устройство 19. Определительное устройство 19 разъясняемым в дальнейшем образом назначает коэффициент F линеаризации и выдает коэффициент F линеаризации в блок 18 умножения. Далее блок 18 умножения принимает от регулятора 15 предварительную регулирующую величину u` и умножает предварительную регулирующую величину u` на коэффициент F линеаризации. Таким образом, блок 17 линеаризации определяет окончательную регулирующую величину u, которая выдается в блок 7 управления клапаном.
Блок 7 управления клапаном регулируется в соответствии с переданной ему регулирующей величиной u. Вследствие этого вызывается то, что поршень 3 перемещается или переставляется, или рабочие давления pA, pB регулируются, и соответственно в целом фактическая величина g приводится к расчетной величине g* со скоростью регулирующего воздействия.
В варианте осуществления согласно фиг. 2 регулятором 15 может быть в принципе любой регулятор. Тем не менее, исполнение регулятора 15 в виде П-регулятора является, как правило, достаточным и даже предпочтительным.
Альтернативно варианту осуществления согласно фиг. 2 согласно фиг. 3 возможно менять очередность регулятора 15 и блока 17 линеаризации. В этом случае исполнение регулятора 15 в виде П-регулятора обязательно. В остальном принцип действия варианта осуществления согласно фиг. 3 полностью аналогичен варианту осуществления согласно фиг. 2. Поэтому от подробных разъяснений к фиг. 3 можно отказаться.
Блок 17 линеаризации имеет определитель 20 расчетных значений. В определитель 20 расчетных значений подаются преобладающие с обеих сторон от поршня 3 рабочие давления pA, pB и оказываемое поршнем 3 расчетное усилие FKL поршня. На основе преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB и расчетного усилия FKL поршня определитель 20 расчетных значений определяет расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB. Определитель 20 расчетных значений подает расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB в определительное устройство 19. Возможно, что определитель 20 расчетных значений определяет расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB исключительно на основе расчетного усилия FKL поршня и преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB. Альтернативно возможно, что определитель 20 расчетных значений дополнительно также учитывает преобладающие со стороны входа и выхода блока 7 управления клапаном рабочие давления pP, pT.
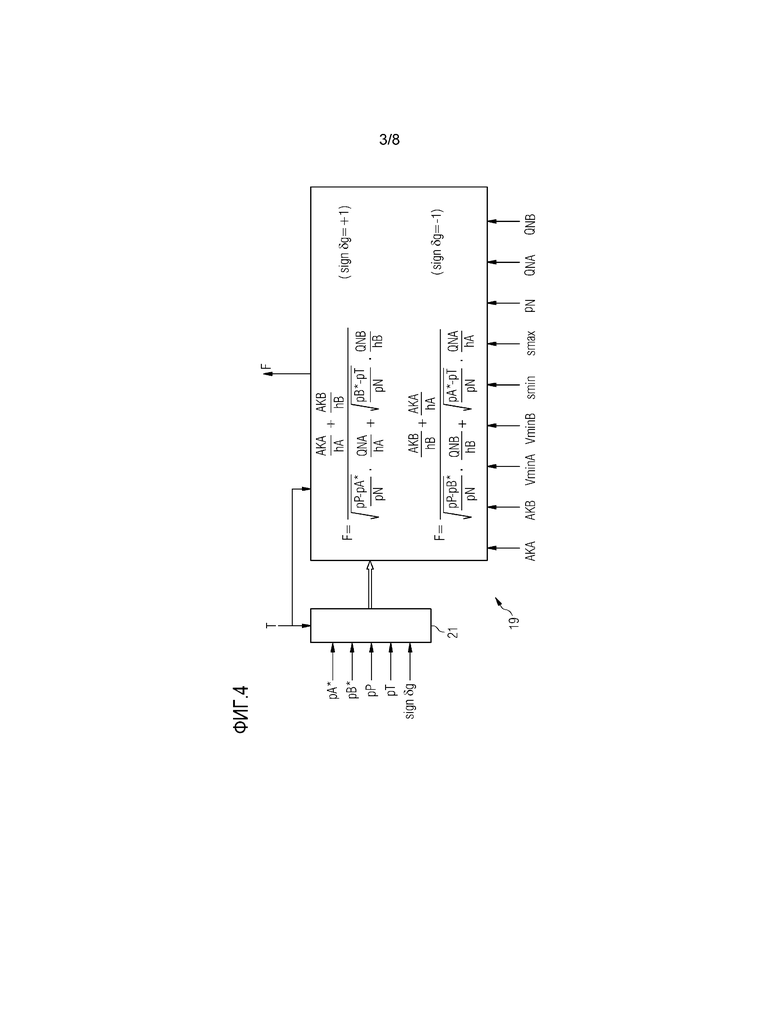
Определительное устройство 19 назначает коэффициент F линеаризации в динамике в виде функции фактического положения s поршня 3, расчетных значений pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB, а также преобладающих со стороны входа и выхода блока 7 управления клапаном рабочих давлений pP, pT. Определительное устройство 19 назначает коэффициент F линеаризации таким образом, что соотношение скорости регулировки фактической величины g к разности δg между расчетной величиной g* и фактической величиной g не зависит от фактического положения s поршня 3, преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB и преобладающих со стороны входа и выхода блока 7 управления клапаном рабочих давлений pP, pT.
Предпочтительный принцип действия определительного устройства 19 разъясняется далее более подробно в сочетании с фиг. 4.
Согласно фиг. 1 регулировочное устройство 11 тактировано обычным образом с рабочим тактом T. С частотой рабочего такта T регулировочное устройство 11 принимает в каждом случае новую расчетную величину g* и новую фактическую величину g, определяет регулирующую величину u и выдает регулирующую величину u в блок 7 управления клапаном.
Равным образом с рабочим тактом T в определительное устройство 19 согласно фиг. 4 подаются в каждом случае новые значения для фактического положения s и расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB. Кроме того, в определительное устройство 19 подается знак (+/-) регулировочной разности δg. Тактируемая подача этих величин s, pA, pB, signδg обозначена на фиг. 4 посредством того, что перед определительным устройством 19 расположена буферная триггер-защелка 21, которая тактирована с рабочим тактом T.
Давление pP насоса и давление pT резервуара, как правило, постоянны. Поэтому возможно подавать эти оба давления pP, pT в определительное устройство 19 однократно (то есть заранее и таким образом в качестве параметров). Альтернативно возможно входное рабочее давление pP и выходное рабочее давление pT подавать в определительное устройство 19 в соответствии с изображением на фиг. 4 с тактированием на рабочие такты T и таким образом в качестве переменных величин.
Как правило, определительному устройству 19 для вычисления коэффициента F линеаризации требуются дальнейшие данные. Дальнейшие данные, как правило, включают в себя технические данные pN, QNA, QNB блока 7 управления клапаном, действующие с обеих сторон от поршня 3 рабочие поверхности AKA, AKB, а также действующие с обеих сторон от поршня 3, минимально возможные объемы VminA, VminB. Эти значения могут быть неизменно заданы в определительное устройство 19, например программным модулем 12. Альтернативно дальнейшие данные могут задаваться - по меньшей мере, частично - в определительное устройство 19 после программирования регулировочного устройства 11 в качестве параметров (то есть в рамках ввода в действие регулировочного устройства 11), которые во время эксплуатации регулировочного устройства 11 остаются неизменными.
Коэффициент F линеаризации зависит от знака регулировочной разности δg. Далее принимается, что регулировочная разность δg положительна (signδg=+1). Таким образом, в случае регулировки положения поршень 3 должен перемещаться в положительном направлении, то есть по направлению к максимальному положению smax. А в случае регулировки усилия действующее в положительном направлении усилие должно таким образом увеличиваться, и соответственно действующее в отрицательном направлении усилие должно уменьшаться.
Если регулировочная разность δg положительна, то определительное устройство 19 назначает коэффициент F линеаризации предпочтительно согласно:
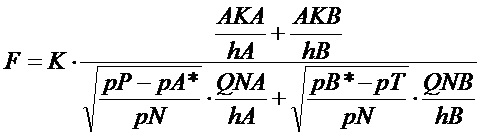
K - это свободно выбираемый постоянный коэффициент масштабирования. Другие использованные в вышеуказанной формуле величины уже имеют определение - за исключением технических данных pN, QNA, QNB блока 7 управления клапаном. Технические данные pN, QNA и QNB блока 7 управления клапаном значат следующее:
- pN - это (в принципе произвольное) номинальное давление. Оно соответствует контрольному давлению, с которым соотнесены величины QNA, QNB.
- QNA - это номинальный объемный поток, который поступает в рабочий объем 5A, если разность между давлением pP насоса и преобладающим в рабочем объеме 5A рабочим давлением pA равна номинальному давлению pN.
- QNB - это номинальный объемный поток, который выходит из рабочего объема 5B, если разность между рабочим давлением pB и давление pT резервуара равна номинальному давлению pN.
Как уже упоминалось, коэффициент F линеаризации зависит от знака регулировочной разности δg. Если регулировочная разность δg отрицательна (signδg=-1), то коэффициент F линеаризации получается согласно:
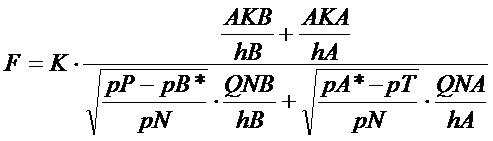
Определительное устройство 19 предпочтительно рассчитывает оба значения и на основе знака регулировочной разности δg выбирает правильный коэффициент F линеаризации.
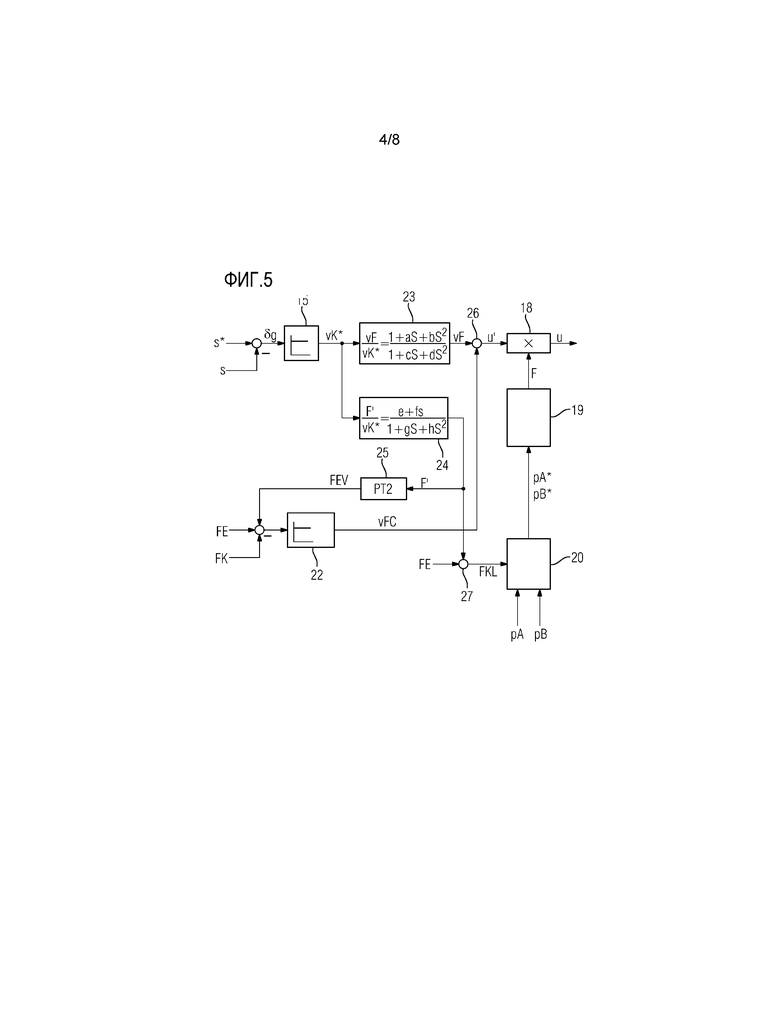
Фиг. 5 показывает возможный вариант осуществления регулировочного устройства 11 в случае, если расчетной величиной g* и фактической величиной g являются позиции или положения s*, s поршня 3 блока 1 гидравлического цилиндра. В этом случае скоростью регулировки фактической величины является (механическая) скорость, с которой перемещается поршень 3.
В случае варианта осуществления с фиг. 5 регулятор 15 действует в качестве позиционного регулятора. Дополнительно регулировочное устройство 11 имеет регулятор 22 усилия, первый фильтр 23 скорости, второй фильтр 24 скорости и блок 25 задержки.
В позиционный регулятор 15 в качестве расчетной величины g* подается расчетное положение s*. Расчетное положение s* является тем положением, которое должно достигаться поршнем 3 блока 1 гидравлического цилиндра. Далее в позиционный регулятор 15 в качестве фактической величины g подается фактическое положение s. На основе расчетного положения s* и фактического положения s регулятор 15 определяет расчетный сигнал vK* скорости. Расчетный сигнал vK* скорости предпочтительно включает в себя пропорциональную составляющую, то есть составляющую, которая пропорциональна регулировочной разности δg. Возможно, что расчетный сигнал vK* скорости включает в себя только пропорциональную составляющую. Альтернативно расчетный сигнал vK* скорости может дополнительно включать в себя интегральную составляющую и/или дифференциальную составляющую.
Расчетный сигнал vK* скорости подается на первый фильтр 23 скорости. При помощи первого фильтра 23 скорости расчетный сигнал vK* скорости фильтруется в отфильтрованный сигнал vF скорости. Первый фильтр 23 скорости предпочтительно рассчитан таким образом, что собственные колебания гидравлической системы возбуждаются как можно меньше. Как правило, внутри себя он имеет неизображенный блок задержки - например, PT2-блок - и далее учитывает необходимые составляющие ускорения и трения, которые возникают в блоке 1 гидравлического цилиндра.
Характеристика фильтрации первого фильтра 23 скорости может быть рассчитана в зависимости от потребности. Во время экспериментов оказалось предпочтительным, если первый фильтр 23 скорости имеет характеристику фильтрации, которая удовлетворяет формуле:
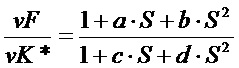
В указанной выше формуле S - это оператор Лапласа. a, b, c и d - это параметры.
Отфильтрованный первым фильтром 23 скорости сигнал vF скорости подается на узловую точку 26, на которую далее подается выходной сигнал vFC регулятора усилия. Отфильтрованный сигнал vF скорости и выходной сигнал vFC регулятора усилия суммируются в узловой точке 26 в суммарный сигнал. Суммарный сигнал, сравнивая с фиг. 2 и согласно изображению на фиг. 5, соответствует предварительной регулирующей величине u`. Подход согласно фиг. 5 может также применяться к варианту осуществления согласно фиг. 3. В этом случае суммарный сигнал соответствует регулирующей величине u.
На регулятор 22 усилия подаются ожидаемое перестановочное усилие FEV, усилие FK поршня и собственное усилие FE. Усилием FK поршня является то усилие, которое оказывается блоком 1 гидравлического цилиндра на поршень 3. Оно получается из эффективных поверхностей AKA, AKB поршня 3 и действующих на эффективные поверхности AKA, AKB рабочих давлений pA, pB. Собственное усилие FE учитывает в частности силу тяжести, которая определена собственным весом перемещенной поршнем 3 массы. На основе ожидаемого перестановочного усилия FEV, усилия FK поршня и собственного усилия FE регулятор 22 усилия определяет выходной сигнал vFC регулятора усилия.
Регулятор 22 усилия стабилизирует гидравлическую систему. Предпочтительно он выполнен в виде регулятора с воздействием по производной, так что выходной сигнал vFC регулятора усилия в установившемся состоянии блока 1 гидравлического цилиндра становится равным нулю.
Ожидаемым перестановочным усилием FEV является то усилие, которое ожидается ввиду сил трения и ускорений. Оно определяется регулировочным устройством 11 на основе выданной регулятором 15 величины vK*. В частности оно определяется вследствие того, что расчетный сигнал vK* скорости сначала фильтруется вторым фильтром 24 скорости в перестановочное усилие F` и затем тормозится блоком 25 задержки.
Второй фильтр 24 скорости выдает в качестве выходного сигнала сумму из силы ускорения и силы трения. С этой целью характеристика фильтрации, которую имеет второй фильтр 24 скорости, может быть рассчитана в зависимости от потребности. Во время экспериментов оказалось предпочтительным, если характеристика фильтрации второго фильтра 24 скорости удовлетворяет формуле:
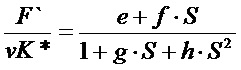
В вышеуказанной формуле F` - это выходной сигнал второго фильтра скорости. vK* - это расчетный сигнал скорости. S - это снова оператор Лапласа. e, f, g и h - это параметры.
Далее во многих случаях справедлива, по меньшей мере, одна из следующих формул. Зачастую справедливы даже все из следующих формул:



Блок 25 задержки служит для того, чтобы воспроизводить динамику блока 7 управления клапаном. Вследствие этого достигается то, что выданный блоком 25 задержки сигнал FEV синхронизирован с усилием FK поршня. Блок 25 задержки может быть выполнен в зависимости от потребности, если это является причиной необходимых функциональных возможностей. Как привило, блок 25 задержки выполнен в виде PT2-блока.
Перестановочное усилие F` подается на узловую точку 27. Кроме того, на узловую точку 27 отводится собственное усилие FE. В узловой точке 27 перестановочное усилие F` и собственное усилие FE складываются в расчетное усилие FKL поршня. Таким образом, регулировочное устройство 11 определяет расчетное усилие FKL поршня на основе собственного усилия FE и перестановочного усилия F`.
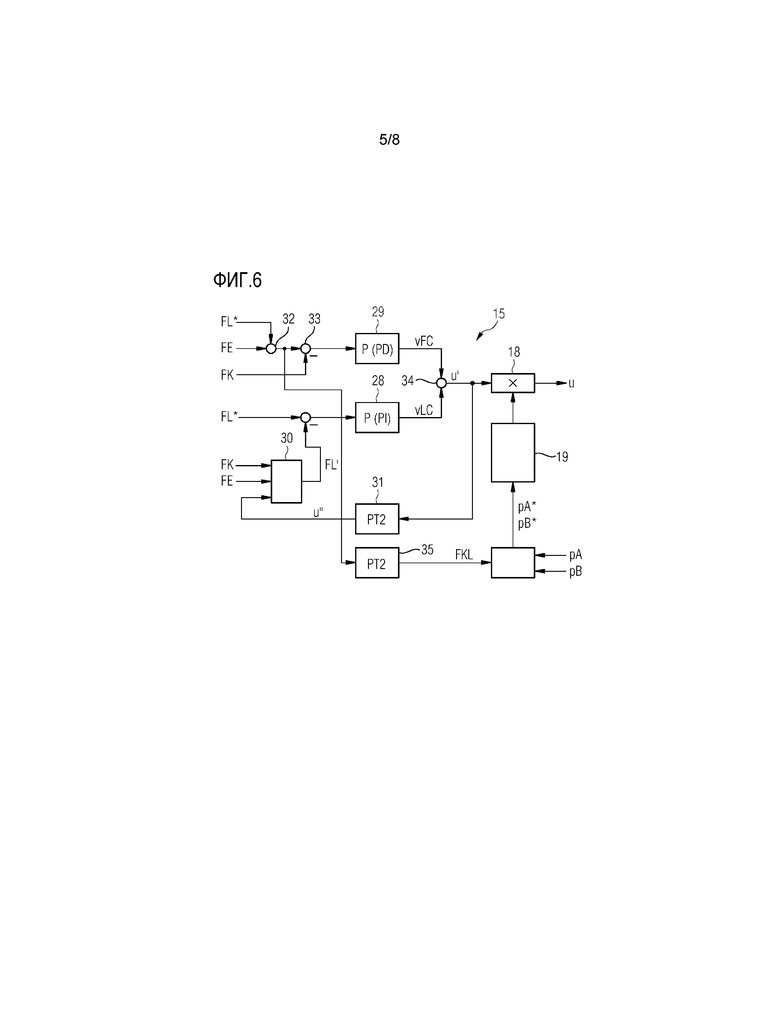
Фиг. 6 показывает возможный вариант осуществления регулировочного устройства 11 в случае, если расчетной величиной g* является расчетное усилие FL* нагрузки. В случае варианта осуществления с фиг. 6 регулятор 15 действует в качестве регулятора усилия. При помощи регулятора 15 в качестве фактической величины g регулируется фактическое усилие нагрузки, которое блок 1 гидравлического цилиндра оказывает через механическую систему на нагрузку. Действующим на поршень 3 усилием FK поршня является - также как в варианте осуществления согласно фиг. 5 - то усилие, которое оказывается блоком 1 гидравлического цилиндра на поршень 3. Оно получается из эффективных поверхностей AKA, AKB поршня 3 и действующих на эффективные поверхности AKA, AKB рабочих давлений pA, pB. Расчетным усилием FL* нагрузки является то усилие, которое должно оказываться поршнем 3 на приведенную в действие поршнем 3 нагрузку.
Согласно фиг. 6 регулятор 15 включает в себя регулятор 28 усилия нагрузки, регулятор 29 усилия, монитор 30 нагрузки и блок 31 задержки.
На регулятор 28 усилия нагрузки подаются расчетное усилие FL* нагрузки и ожидаемое фактическое усилие FL` нагрузки - то есть определенное путем расчета значение для фактического усилия нагрузки. Ожидаемое фактическое усилие FL` нагрузки определяется монитором 30 нагрузки.
Регулятор 28 усилия нагрузки регулирует усилие нагрузки. С этой целью на основе разности расчетного усилия FL* нагрузки и ожидаемого фактического усилия FL` нагрузки регулятор 28 усилия нагрузки определяет выходной сигнал vLC, называемый в дальнейшем выходным сигналом нагрузки. Регулятор 28 усилия нагрузки обычно выполнен в виде П-регулятора или PI-регулятора (пропорционально-интегрального регулятора).
Блок 31 задержки воспроизводит динамику блока 7 управления клапаном. Вследствие этого достигается то, что замедленный суммарный сигнал vU синхронизирован с усилием FK поршня. Блок 31 задержки может быть выполнен в зависимости от потребности, если это является причиной разъясненных только что функциональных возможностей. Как привило, блок 31 задержки выполнен в виде PT2-блока.
Перед регулятором 29 усилия расположены две узловые точки 32, 33. В узловой точке 32 к расчетному усилию FL* нагрузки прибавляется собственное усилие FE. Собственное усилие FE учитывает - также как в варианте осуществления согласно фиг. 5 - в частности силу тяжести, которая определена собственным весом перемещенной поршнем 3 массы. В узловой точке 33 от этой суммы отнимается усилие FK поршня. Выходной сигнал узловой точки 33 подается на регулятор 29 усилия. Регулятор 29 усилия определяет выходной сигнал vFC, называемый в дальнейшем выходным сигналом регулятора усилия. Регулятор 29 усилия обычно выполнен в виде П-регулятора или PD-регулятора (пропорционально-дифференциального регулятора). Регулятор 29 усилия стабилизирует регулировку и делает возможной более высокую динамику.
Выходные сигналы vLC, vFC регулятора 28 усилия нагрузки и регулятора 29 усилия суммируются в узловой точке 34 в предварительную регулирующую величину u`. Предварительная регулирующая величина u` подается в блок 17 линеаризации, который линеаризирует предварительную регулирующую величину u`. Блок 17 линеаризации расположен непосредственно перед блоком 7 управления клапаном. Блок 17 линеаризации компенсирует - см. варианты осуществления на фиг. 1, 2 и 4 - нелинейности гидравлической системы.
Чтобы монитор 30 нагрузки мог определять ожидаемое фактическое усилие FL` нагрузки, в монитор 30 нагрузки подаются усилие FK поршня, собственное усилие FE и замедленная регулирующая величина u``. Замедленная регулирующая величина u`` определяется блоком 31 задержки посредством замедления предварительной регулирующей величины u`.
Согласно фиг. 6 в определитель 20 расчетных значений в качестве расчетного усилия FKL поршня подается сумма из расчетного усилия FL* нагрузки и собственного усилия FE. Таким образом, регулировочное устройство 11 определяет расчетное усилие FKL поршня на основе собственного усилия FE и расчетной величины FL*.
Предпочтительно сумма из расчетного усилия FL* нагрузки и собственного усилия FE не подается в определитель 20 расчетных значений напрямую, а перед этим замедляется блоком 35 задержки. Блок 35 задержки воспроизводит динамику регулировки за вычетом динамики блока 7 управления клапаном. Вследствие этого достигается то, что расчетное усилие FKL поршня синхронизировано с усилием FK поршня. Блок 35 задержки может быть выполнен в зависимости от потребности, если это является причиной разъясненных только что функциональных возможностей. Как привило, блок 35 задержки выполнен в виде PT2-блока.
Монитор 30 нагрузки может быть также выполнен в зависимости от потребности. Решающим является то, что он воспроизводит фактическое усилие нагрузки. Таким образом, монитор 30 нагрузки действует в качестве соответствующего плавного датчика, который на основе (по меньшей мере, одной) измеренной величины (а именно усилия FK поршня) воспроизводит неизмеренное фактическое усилие нагрузки. Структура и принцип действия монитора 30 нагрузки, в общем, известны специалистам. Для его реализации существуют несколько возможностей, которые также известны специалистам. Предпочтительным является вариант осуществления, который разъяснен в WO 2011/000 856 A2 в сочетании с фиг. 3 этого документа.
Сумма оцененных эффективными рабочими поверхностями AKA, AKB поршня 3 расчетных значений pA*, pB* соответствует расчетному усилию FKL поршня. Таким образом, справедлива формула:

Однако одно уравнение - в данном случае уравнение 16 - является недостаточным для определения двух неизвестных величин - в данном случае расчетных значений pA*, pB*. Таким образом, требуется дальнейшее условие, для того чтобы была возможность однозначно определять расчетные значения pA*, pB*. Возможность для однозначного определения расчетных значений pA*, pB* состоит в том, что регулировочное устройство 11 определяет расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB таким образом, что сумма расчетных значений pA*, pB* равна линейной комбинации из суммы преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB и суммы преобладающих со стороны входа и выхода блока 7 управления клапаном рабочих давлений pP, pT. Таким образом, в этом случае в качестве дополнительного условия справедлива формула:
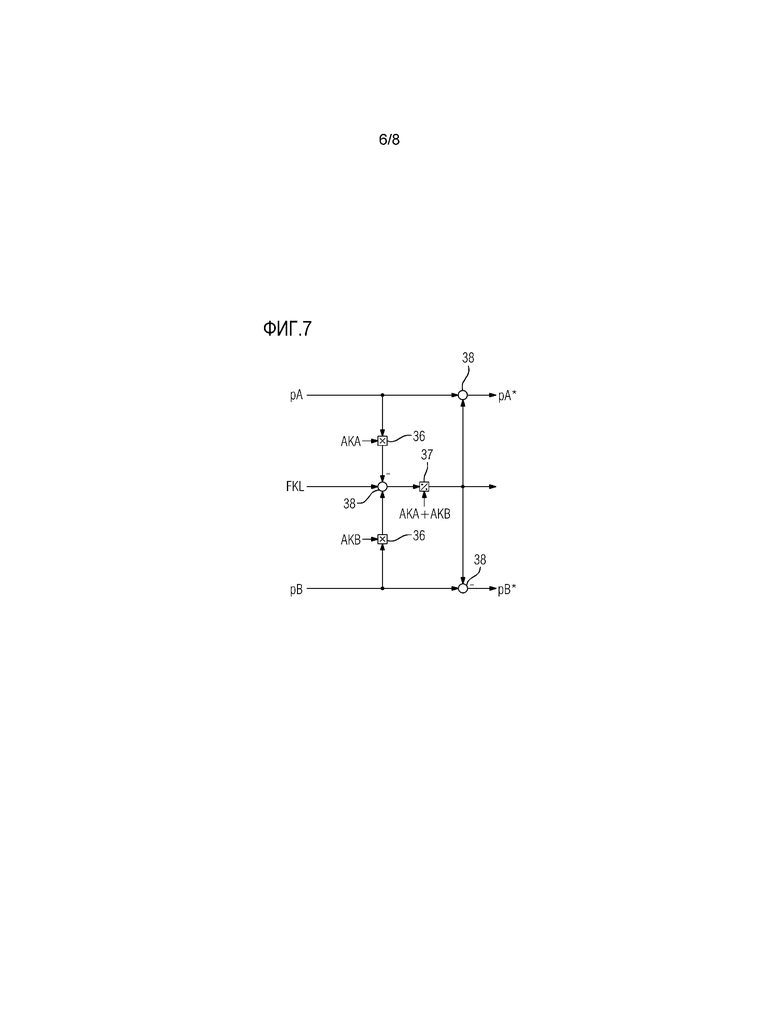
α - это поправочный коэффициент, который минимум равен 0, а максимум 1. Если поправочный коэффициент α имеет значение 1, то определитель 20 расчетных значений определяет расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB исключительно на основе расчетного усилия FKL поршня и преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB. Для любого другого значения поправочного коэффициента α определитель 20 расчетных значений дополнительно - или в случае, если поправочный коэффициент α имеет значение 0, альтернативно - учитывает преобладающие со стороны входа и выхода блока 7 управления клапаном рабочие давления pP, pT. Возможная структура для определения расчетных значений pA*, pB* в случае, если сумма расчетных значений pA*, pB* равна сумме преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB, изображена на фиг. 7.
Согласно фиг. 7 структура имеет два блока 36 умножения, один блок 37 деления и три узловые точки 38. Блоки 36 умножения перемножают друг с другом поданные на них входные сигналы pA и AKA и соответственно pB и AKB. Блок 37 деления делит поданный на него входной сигнал:

на сумму из эффективных рабочих поверхностей AKA, AKB. Узловые точки 38 образуют сумму поданных на них входных сигналов. Если входной сигнал снабжен знаком "минус", то соответствующий входной сигнал входит в сумму с отрицательным знаком, то есть вычитается. На выходах структуры выдаются расчетные значения pA*, pB*. Таким образом, расчетные значения pA*, pB* получаются из формул:


Эти уравнения могут преобразовываться в следующие:
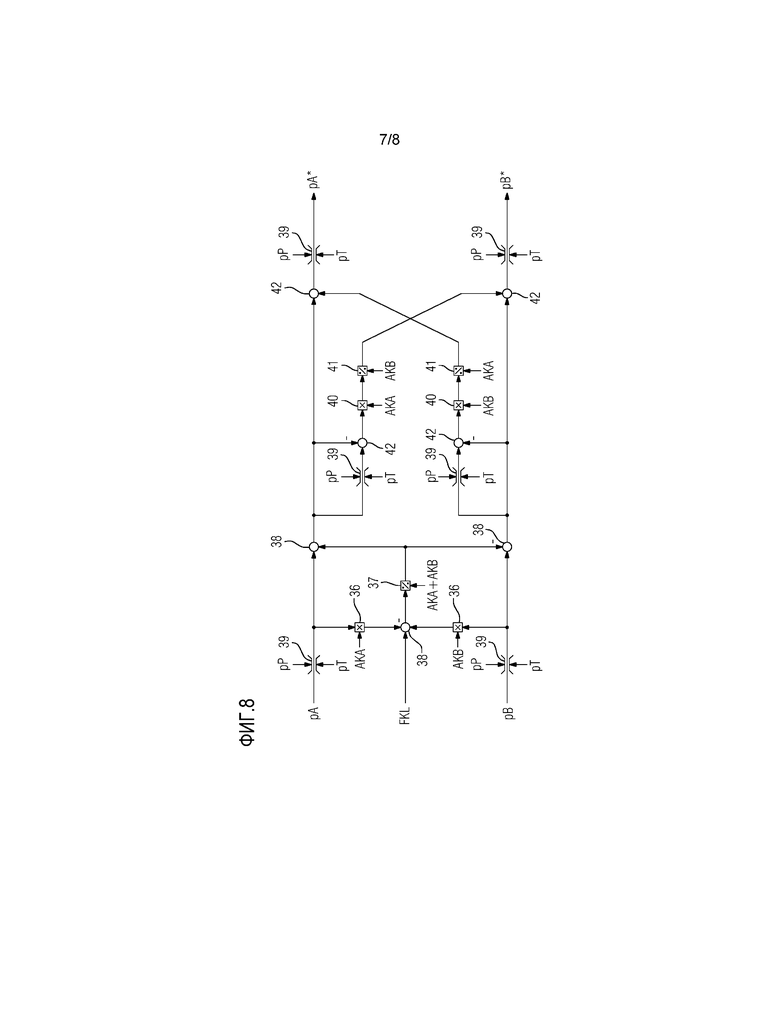
Фиг. 8 показывает дальнейший вариант осуществления с фиг. 7. При помощи варианта осуществления с фиг. 8 достигается то, что регулировочное устройство 11 ограничивает расчетные значения pA*, pB* для преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB значениями между преобладающими со стороны входа и выхода блока 7 управления клапаном рабочими давлениями pP, pT.
Согласно фиг. 8 и со стороны входов структуры, и со стороны выходов структуры, и внутри структуры имеются ограничители 39. При помощи ограничителей 39 осуществляется ограничение проходящего через соответствующий ограничитель 39 сигнала значением между давлением pT резервуара и давлением pP насоса. Кроме того, в дополнение к блокам 36 умножения имеются дальнейшие блоки 40 умножения, в дополнение к блоку 37 деления имеются дальнейшие блоки 41 деления, и в дополнение к узловым точкам 38 имеются дальнейшие узловые точки 42. Назначение и принцип действия проистекают непосредственно из изображения на фиг. 8.
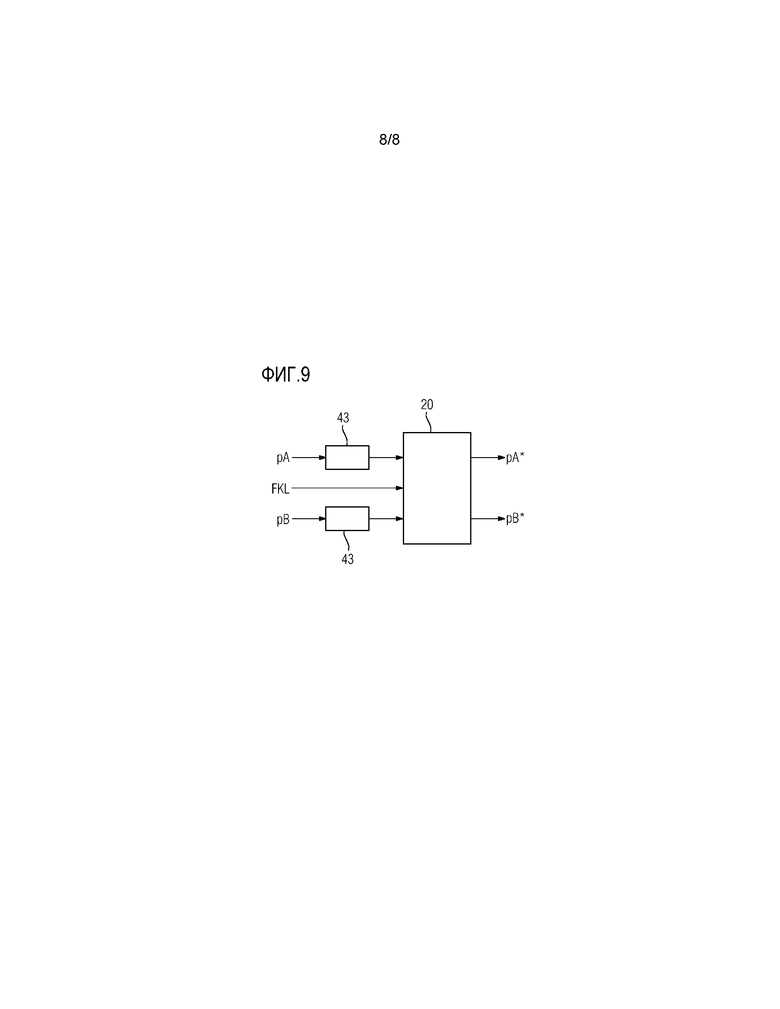
Возможно подавать преобладающие с обеих сторон от поршня 3 рабочие давления pA, pB напрямую на определитель 20 расчетных значений. Тем не менее, предпочтительно перед определителем 20 расчетных значений расположены согласно изображению на фиг. 9 сглаживающие блоки 43. При помощи сглаживающих блоков 43 сглаживаются рабочие давления pA, pB. Постоянная времени сглаживания сглаживающих блоков 43 может находиться между 10 мс и 1000 мс, например между 30 мс и 300 мс. Во время экспериментов значение приблизительно в 100 мс оказалось предпочтительным.
Выше изобретение было разъяснено в сочетании с блоком 1 гидравлического цилиндра, у которого расчетной величиной g* и фактической величиной g являются величины поступательного движения. Тем не менее, изобретение может также использоваться, если расчетной величиной g* и фактической величиной g являются величины вращательного движения. В этом случае расстояния должны заменяться соответствующими углами, а усилия соответствующими моментами.
Данное изобретение имеет много преимуществ. В частности значительно снижена опасность колебаний, так как колебания хотя и приводят к противофазной осцилляции рабочих давлений pA, pB, тем не менее, в уравнения для определения расчетных значений pA*, pB* - см. в частности уравнения 21 и 22 - и тем самым также коэффициента F линеаризации входит лишь сумма рабочих давлений pA, pB. Сглаживание рабочих давлений pA, pB приводит к еще большей стабилизации системы.
Подытоживая, данное изобретение относится, таким образом, к следующему аспекту:
Регулятор 15 принимает относящуюся к поршню 3 блока 1 гидравлического цилиндра расчетную величину g* и относящуюся к поршню 3 блока 1 гидравлического цилиндра фактическую величину g. На основе их разности δg он определяет предварительную регулирующую величину u`. Расположенный за регулятором 15 блок 17 линеаризации умножает предварительную регулирующую величину u` на коэффициент F линеаризации и выдает произведение в качестве окончательной регулирующей величины u в блок 7 управления клапаном, так что поршень 3 блока 1 гидравлического цилиндра перемещается со скоростью v регулирующего воздействия. На основе преобладающих с обеих сторон от поршня 3 рабочих давлений pA, pB и/или преобладающих со стороны входа и выхода блока 7 управления клапаном рабочих давлений pP, pT, а также на основе оказываемого поршнем 3 расчетного усилия FKL поршня блок 17 линеаризации определяет расчетные значения pA*, pB* для рабочих давлений pA, pB. Блок 17 линеаризации в динамике назначает коэффициент F линеаризации в виде функции фактического положения s поршня 3, функции расчетных значений pA*, pB*, а также функции преобладающих со стороны входа и выхода блока 7 управления клапаном рабочих давлений pP, pT.
Несмотря на то, что изобретение было детально и более подробно иллюстрировано и описано посредством предпочтительных примеров осуществления, изобретение не ограничено раскрытыми примерами, и другие варианты могут выводиться отсюда специалистом, не покидая объем защиты изобретения.
Изобретение относится к регулировочному устройству для регулировки блока гидравлического цилиндра. Регулятор (15) принимает относящуюся к поршню (3) блока (1) гидравлического цилиндра расчетную величину (g*) и относящуюся к поршню (3) блока (1) гидравлического цилиндра фактическую величину (g). На основе их разности (δg) он определяет предварительную регулирующую величину (u`). Расположенный после регулятора (15) блок (17) линеаризации умножает предварительную регулирующую величину (u`) на коэффициент (F) линеаризации и выдает произведение в качестве окончательной регулирующей величины (u) в блок (7) управления клапаном, так что фактическая величина (g) приводится к расчетной величине (g*) со скоростью регулирующего воздействия. На основе преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) и/или преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT), а также на основе оказываемого поршнем (3) расчетного усилия (FKL) поршня блок (17) линеаризации определяет расчетные значения (pA*, pB*) для рабочих давлений (pA, pB). Блок (17) линеаризации в динамике назначает коэффициент (F) линеаризации в виде функции фактического положения (s) поршня (3), функции расчетных значений (pA*, pB*), а также функции преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT). В результате устраняются ошибки запаздывания и дестабилизация регулировки. 2 н. и 8 з.п. ф-лы, 9 ил.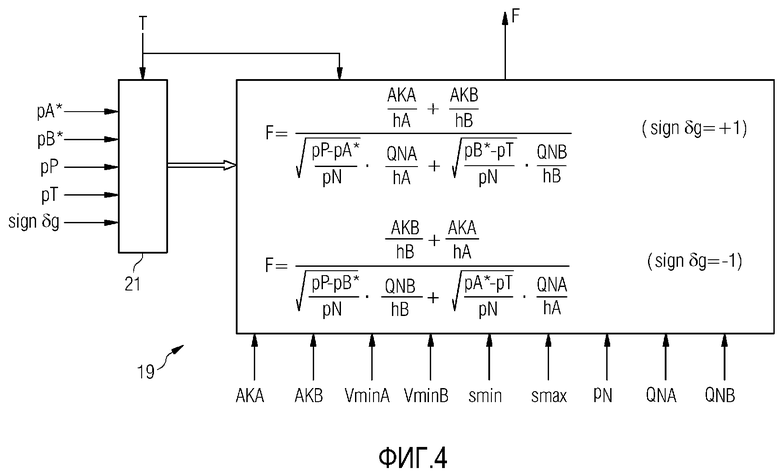
1. Регулировочное устройство для регулировки блока (1) гидравлического цилиндра,
- причем регулировочное устройство имеет регулятор (15), который на входе принимает относящуюся к поршню (3) блока (1) гидравлического цилиндра расчетную величину (g*) и относящуюся к поршню (3) блока (1) гидравлического цилиндра фактическую величину (g) и на основе разности (δg) расчетной величины (g*) и фактической величины (g) определяет предварительную регулирующую величину (u`) для блока (7) управления клапаном блока (1) гидравлического цилиндра,
- причем за регулятором (15) расположен блок (17) линеаризации, который умножает предварительную регулирующую величину (u`) на коэффициент (F) линеаризации и выдает умноженную на коэффициент (F) линеаризации предварительную регулирующую величину (u`) в качестве окончательной регулирующей величины (u) в блок (7) управления клапаном, так что фактическая величина (g) приводится к расчетной величине (g*) со скоростью регулирующего воздействия,
- причем на основе преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) и/или преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT), а также на основе оказываемого поршнем (3) расчетного усилия (FKL) поршня блок (17) линеаризации определяет расчетные значения (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB),
- причем блок (17) линеаризации в динамике назначает коэффициент (F) линеаризации в виде функции фактического положения (s) поршня (3), функции расчетных значений (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB), а также функции преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT).
2. Регулировочное устройство по п. 1, отличающееся тем, что регулятор (15) выполнен в виде П-регулятора.
3. Регулировочное устройство для регулировки блока (1) гидравлического цилиндра,
- причем регулировочное устройство имеет выполненный в виде П-регулятора регулятор (15), который на входе принимает управляющую величину (δg`), на основе управляющей величины (δg`) определяет регулирующую величину (u) для блока (7) управления клапаном блока (1) гидравлического цилиндра и выдает регулирующую величину (u) в блок (7) управления клапаном, так что относящаяся к поршню (3) блока (1) гидравлического цилиндра фактическая величина (g) приводится к относящейся к поршню (3) блока (1) гидравлического цилиндра расчетной величине (g*) со скоростью регулирующего воздействия,
- причем перед регулятором (15) расположен блок (17) линеаризации, который принимает расчетную величину (g*) и фактическую величину (g), их разность (δg) умножает на коэффициент (F) линеаризации и умноженную на коэффициент (F) линеаризации разность (δg) выдает в качестве управляющей величины (δg`) в регулятор (15),
- причем на основе преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) и/или преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT), а также на основе оказываемого поршнем (3) расчетного усилия (FKL) поршня блок (17) линеаризации определяет расчетные значения (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB),
- причем блок (17) линеаризации в динамике назначает коэффициент (F) линеаризации в виде функции фактического положения (s) поршня (3), функции расчетных значений (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB), а также функции преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT).
4. Регулировочное устройство по любому из пп. 1-3, отличающееся тем, что расчетной величиной (g*) и фактической величиной (g) являются положения (s*, s) поршня (3) блока (1) гидравлического цилиндра и что регулировочное устройство определяет расчетное усилие (FKL) поршня на основе собственного усилия (FE) и перестановочного усилия (F`), что собственное усилие (FE) задано собственным весом перемещенной поршнем (3) массы и что регулировочное устройство определяет перестановочное усилие (F`) на основе выданной регулятором (15) величины (vK*), из которой посредством фильтрации определяется предварительная или окончательная регулирующая величина (u`, u).
5. Регулировочное устройство по любому из пп. 1-3, отличающееся тем, что расчетной величиной (g*) является расчетное усилие (FL*) нагрузки, что фактической величиной (g) является оказанное блоком (1) гидравлического цилиндра на нагрузку фактическое усилие нагрузки, что регулировочное устройство определяет расчетное усилие (FKL) поршня на основе собственного усилия (FE) и расчетной величины (g*) и что собственное усилие (FE) задано собственным весом перемещенной поршнем (3) массы.
6. Регулировочное устройство по п. 5, отличающееся тем, что регулировочное устройство на основе собственного усилия (FE) и расчетной величины (g*) определяет мгновенное расчетное значение усилия и что регулировочное устройство определяет расчетное усилие (FKL) поршня посредством задержки мгновенного расчетного значения усилия при помощи блока (35) задержки.
7. Регулировочное устройство по любому из пп. 1-6, отличающееся тем, что регулировочное устройство определяет расчетные значения (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) таким образом, что сумма расчетных значений (pA*, pB*) равна линейной комбинации из суммы преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) и суммы преобладающих со стороны входа и выхода блока (7) управления клапаном рабочих давлений (pP, pT).
8. Регулировочное устройство по любому из пп. 1-7, отличающееся тем, что регулировочное устройство ограничивает расчетные значения (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB) значениями между преобладающими со стороны входа и выхода блока (7) управления клапаном рабочими давлениями (pP, pT).
9. Регулировочное устройство по любому из пп. 1-8, отличающееся тем, что регулировочное устройство сглаживает преобладающие с обеих сторон от поршня (3) рабочие давления (pA, pB) перед определением расчетных значений (pA*, pB*) для преобладающих с обеих сторон от поршня (3) рабочих давлений (pA, pB).
10. Регулировочное устройство по любому из пп. 1-9, отличающееся тем, что оно выполнено в виде программируемого программным обеспечением регулировочного устройства и запрограммировано программным модулем (12), так что оно за счет программирования программным модулем (12) выполнено по любому из пп. 1-9.
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ БЛОКА ГИДРАВЛИЧЕСКОГО ЦИЛИНДРА С БЛОКОМ ЛИНЕАРИЗАЦИИ | 2008 |
|
RU2464618C2 |
| US 5353217 A, 04.10.1994 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

