Изобретение относится к способу регулирования механико-гидравлической системы с одной степенью свободы на каждый гидравлический актуатор в качестве объекта регулирования и к устройству для осуществления способа.
Механико-гидравлические системы с одной (механической) степенью свободы, т.е. системы, в которых, например, механическая часть с одной степенью свободы (нагрузочная система) приводится в действие гидроцилиндром (актуатор), встречаются на практике в самых разнообразных вариантах, например в виде формирующего ролика моталки, петледержателя между двумя клетями прокатного стана, или в виде гидравлической установки клети прокатного стана, или в общих применениях, таких как позиционирующие столы, вибростолы и т.д. Подобным системам присуще то, что из-за гидравлического масляного столба в гидроцилиндре или других пружинящих элементов в нагрузочной системе они являются, в принципе, колебательными. В качестве эквивалентных, однако, ни в коем случае не ограничивающих общезначимость примеров здесь следует привести применения, в которых, например, линейный гидроцилиндр движет установленную с возможностью вращения массу, например формирующий ролик моталки, петледержатель и т.д. В таких системах выраженная колебательная характеристика проявляется за счет действующего как пружина гидравлического масляного столба. Это выражается в нежелательной склонности к колебанию всей системы в определенных местах частотной характеристики. Возникающие при этом резонансные частоты определяются, в основном, эквивалентной массой механической системы, геометрическими условиями, а также жесткостью эквивалентной пружины возникающих упругостей, например сжимаемостью масляного столба и/или упругостью прокатной клети и т.д. Для таких систем с выраженными резонансными частотами типично то, что они при управляющих вмешательствах извне склонны к (демпфированным) колебаниям. В регулировочных процессах, имеющих своей целью, например, достижение новой рабочей точки или устранение привнесенного извне сбоя, эти колебания вызывают крайне нежелательные переходные изменения физических величин. В приведенном выше примере петледержателя это выражается в колебаниях натяжения полосы, которые, в свою очередь, приводят к ее нежелательным сужениям. В случае формирующего ролика эти колебания давления ролика на полосу могут привести к повреждениям ее поверхности за счет вмятин.
Поэтому на практике регуляторы часто настраиваются очень медленно, чтобы поддерживать на минимально возможном уровне возбуждение этих нежелательных колебаний. Одной известной из литературы возможностью является использование так называемых «Notch-фильтров», узкополосных заграждающих фильтров, целью которых является предотвращение возбуждения колебаний регулятором за счет целенаправленного уменьшения частотного диапазона на резонансную частоту регулируемой системы в регулируемой величине. Существенным недостатком этого метода, особенно в упомянутых применениях, является тот факт, что характеристика механической системы остается неизменной и, хотя сам регулятор предотвращает возбуждение колебаний, воздействующие извне нерегистрируемые помехи по-прежнему вызывают колебания системы. Также резонансные частоты зависят от выбранной рабочей точки.
Еще более существенным недостатком в таких системах является то, что они, как уже сказано, имеют, в целом, нелинейную характеристику. Известные методы, такие как использование Notch-фильтров, являются методами техники линейного регулирования и в нелинейных системах действуют только вблизи рабочей точки, для которой нелинейный объект был аппроксимирован за счет линейной системы. Понятно, например, в линейных гидроприводах, что с изменением положения поршня гидропривода и, тем самым, масляного столба, изменяется и резонансная частота. В описанном выше методе имеется возможность выбрать очень широкий Notch-фильтр, что, в свою очередь, значительно ограничивает динамику всей системы.
Задачей изобретения является создание способа регулирования и регулятора, которые позволили бы стабилизировать механические системы с одной степенью свободы на каждый актуатор, т.е., в целом, нелинейную систему, во всем рабочем диапазоне, одновременно улучшить колебательную характеристику механико-гидравлической системы и, в частности, уменьшить склонность к колебаниям механической системы за счет ввода активного демпфирования.
В части способа эта задача решается посредством способа регулирования гидравлической системы с одной степенью свободы на каждый гидравлический актуатор в качестве объекта регулирования, в котором при регулировании учитывают заданное давление  гидравлической системы, преимущественно в виде терма
гидравлической системы, преимущественно в виде терма  , и к регулированию подключают скорость νh гидравлического актуатора (3) в виде демпфирования, причем заданное значение и скорость νh гидравлического актуатора определяют посредством наблюдателя и скорость νh гидравлического актуатора подключают к выходному сигналу регулятора (R).
, и к регулированию подключают скорость νh гидравлического актуатора (3) в виде демпфирования, причем заданное значение и скорость νh гидравлического актуатора определяют посредством наблюдателя и скорость νh гидравлического актуатора подключают к выходному сигналу регулятора (R).
В части регулятора поставленная задача решается тем, что в регуляторе для механико-гидравлической системы с одной степенью свободы на каждый гидравлический актуатор в качестве объекта регулирования, содержащем измерительный датчик (6) для измерения давления ph в гидравлической системе, например гидроцилиндре (3), и измерительный датчик (8) для измерения положения хh гидравлического актуатора, например поршня гидроцилиндра (3), предусмотрен регулирующий блок с входными величинами: гидравлическое давление ph и положение хh гидравлического актуатора, в регулирующем блоке реализован наблюдатель для определения заданного давления в гидравлической системе и скорости νh гидравлического актуатора (3), в законе регулирования регулятора учитывают заданное давление , преимущественно в виде терма , и скорость νh гидравлического актуатора в виде демпфирования может быть подключена к регулированию, причем это осуществляют на выходе регулятора (R).
В способе при регулировании, например, положения учитывается заданное давление в гидравлической системе, преимущественно в виде терма  , и/или скорость νh гидравлического актуатора, например, поршня гидроцилиндра, в виде демпфирования, например в комбинации с общей функцией С3, например, через коэффициент kd демпфирования (т.е. подключается к регулированию (с эффектом параметрируемого дополнительного демпфирования)), причем заданное давление
, и/или скорость νh гидравлического актуатора, например, поршня гидроцилиндра, в виде демпфирования, например в комбинации с общей функцией С3, например, через коэффициент kd демпфирования (т.е. подключается к регулированию (с эффектом параметрируемого дополнительного демпфирования)), причем заданное давление
и/или скорость νh гидравлического актуатора определяется наблюдателем.
Регулятор содержит измерительный датчик для измерения давления ph в гидравлической системе, например гидроцилиндре, и измерительный датчик для измерения положения хh гидравлического актуатора, например поршня гидроцилиндра, и отличается тем, что предусмотрен регулирующий блок с входными величинами «гидравлическое давление ph» и «положение хh гидравлического актуатора», причем в регулирующий блок встроен наблюдатель для определения заданного давления и/или скорости νh гидравлического актуатора, и в законе регулирования регулятора учитывается заданное давление , преимущественно в виде терма  , и/или скорость νh гидравлического актуатора в виде демпфирования, т.е. в комбинации с общей передаточной функцией С3 (например, в простейшем случае пропорциональный терм kd), например, с возможностью подключения к регулированию.
, и/или скорость νh гидравлического актуатора в виде демпфирования, т.е. в комбинации с общей передаточной функцией С3 (например, в простейшем случае пропорциональный терм kd), например, с возможностью подключения к регулированию.
Дополнительно может быть предусмотрено, что измеренное ускорение a h гидравлического актуатора относительно резервуара (например, корпуса гидроцилиндра), охватывающего прикладывающую усилие к гидравлическому актуатору среду, как правило, в комбинации с общей передаточной функцией С4 подключается к регулированию.
Следовательно, не требуется непосредственного измерения или νh, однако если таковое имеется, то оно, конечно, может быть использовано.
В регулирование может быть включено либо только заданное давление в гидравлической системе, либо только скорость νh гидравлического актуатора, либо могут быть включены обе величины.
Этот способ регулирования и этот регулятор стабилизируют всю механическую систему с одной степенью свободы независимо от выбора регулируемой величины, например положения или давления (или исполнительного усилия). Дополнительно они способны эффективно демпфировать систему за счет отбора подходящим образом энергии из колебательной системы. Тем самым, они активно уменьшают склонность к колебаниям отрегулированной системы или в идеальном случае в значительной степени подавляют колебания системы. Способ дает возможность ввода активного демпфирования в систему в разных проявлениях, благодаря чему можно также гибко настраивать эффективное демпфирование системы.
Способ отличается далее особой стабильностью. Также при изменениях физических условий, например сжимаемости гидравлического масляного столба, а также при возникновении определенных утечек в гидравлическом актуаторе регулятор способен надежно стабилизировать всю систему (нагрузочная система + гидравлика) во всем диапазоне, ограниченном только механической конструкцией. Таким образом, эффективно уменьшаются или предотвращаются нежелательные изменения регулируемых величин, например натяжение полосы или усилие на полосу в прокатных станах, которые, в свою очередь, выразились бы в снижении качества.
Кроме того, оптимизированные за счет введенного активного демпфирования регулирующие контуры могут быть настроены заметно быстрее, что, в свою очередь, может вызвать повышение качества или увеличение производства, поскольку, с одной стороны, быстрее и, тем самым, эффективнее могут быть отрегулированы помехи, а с другой стороны, быстрее достигнуты заданные значения.
Другие особенно предпочтительные варианты приведены в зависимых пунктах и описании изобретения.
Так, является предпочтительным, если для наблюдателя используют математическую модель объекта регулирования, в которой входную величину подвергают преобразованию управляющей величины до новой входной величины uobs, так что математическая модель объекта регулирования для наблюдателя становится линейной. Механическая нагрузочная система может быть изображена в виде математической модели, причем систему уравнений изображают методами аналитической механики, например, с помощью формализма Лагранжа
 ,
,

В случае непостоянной матрицы массы для создания наблюдателя преобразование координат и управляющих величин (например, до нового входа  предпочтительно осуществляют так, что в преобразованных координатах матрица массы представляется в виде постоянной. Также при непостоянной матрице массы возможно использование нелинейного наблюдателя, в котором неявным образом учитывают преобразование координат и управляющих величин, указанных выше.
предпочтительно осуществляют так, что в преобразованных координатах матрица массы представляется в виде постоянной. Также при непостоянной матрице массы возможно использование нелинейного наблюдателя, в котором неявным образом учитывают преобразование координат и управляющих величин, указанных выше.
Предпочтительным образом, заданное давление  определяют по выявленному посредством наблюдателя в смысле наблюдателя управляющих величин состоянию
определяют по выявленному посредством наблюдателя в смысле наблюдателя управляющих величин состоянию  путем обратного преобразования. При этом с помощью наблюдателя определяют импульс
путем обратного преобразования. При этом с помощью наблюдателя определяют импульс  , а из него - скорость
, а из него - скорость  .
.
Согласно одному варианту осуществления изобретения скорость νh гидравлического актуатора в комбинации с общей передаточной функцией (С3) (например, в простейшем случае пропорциональный терм kd) предпочтительным образом подключают к замкнутому регулирующему контуру. Кроме того, измеренное ускорение а h гидравлического актуатора в комбинации с общей передаточной функцией (C4) может быть предпочтительным образом подключена к регулированию. В одном усовершенствовании изобретения предусмотрено, что скорость νh гидравлического актуатора в комбинации с общей передаточной функцией (С3) может быть подключена к замкнутому регулирующему контуру.
Согласно одному особому варианту регулятор выполнен с возможностью возвратно-поступательного переключения между несколькими режимами регулирования, в которых подключают различные демпфирования.
Настоящее изобретение описано ниже прежде всего для общих механико-гидравлических систем с одной степенью свободы на каждый актуатор, а затем с помощью двух специальных, не ограничивающих изобретение и примерных применений со ссылкой на схематичные, не ограничивающие изобретение и примерные чертежи, на которых изображают:
фиг.1: формирующий ролик;
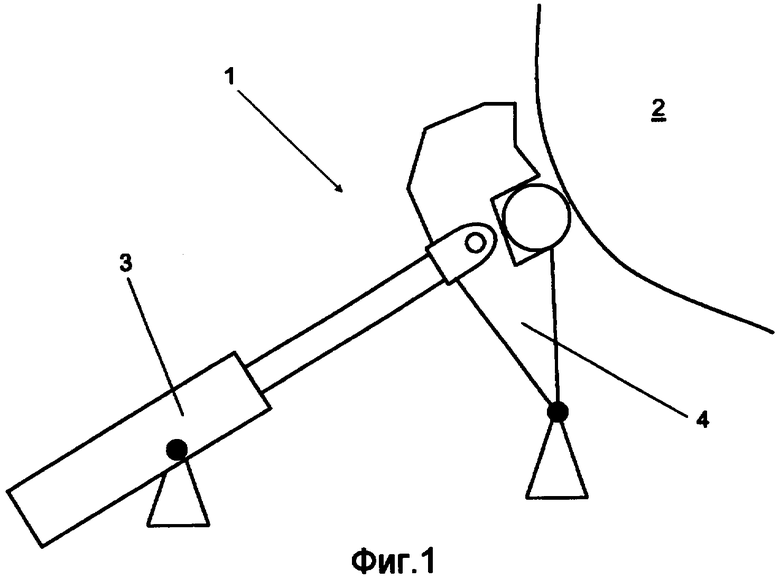
фиг.2: модель формирующего ролика в виде системы пружина-масса;
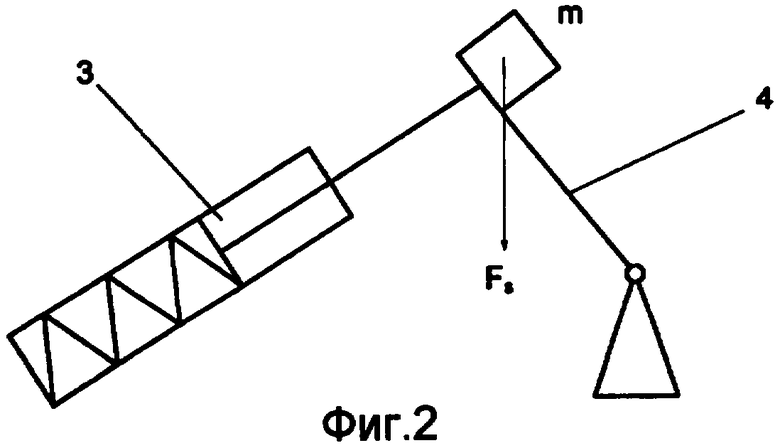
фиг.3: геометрические условия на формирующем ролике;
фиг.4: индикатор;
фиг.5: регулирующую схему.
В целом, механико-гидравлические системы с одной степенью свободы могут рассматриваться, с точки зрения моделирования, состоящими из нелинейной при определенных обстоятельствах механической нагрузочной системы (например, формирующий ролик, рука робота, демпфирующая система пружина-масса и т.д., однако, например, также только масса цилиндра самого актуатора) и нелинейной в большинстве случаев актуаторной системы (создание давления или давлений), которая питается через один или несколько гидроклапанов. Для придания всей системе желаемой характеристики подходящим образом задается количество гидравлической жидкости, находящейся в актуаторе, которая подается через один или несколько гидроклапанов. Для этого подходящим образом учитывается упругая характеристика жидкости.
Если физические условия нагрузочной системы и, тем самым,  известны недостаточно точно, например действует неизвестное внешнее генерализированное усилие, то сначала количество жидкости может быть задано не непосредственно. По этой причине для количества жидкости, требуемого для желаемого состояния нагрузочной системы, создан наблюдатель. Этот, в целом, нелинейный наблюдатель может быть выполнен также без измерения генерализированной скорости нагрузочной системы без нарушения при этом его функции. Сам регулятор использует известную или полученную из наблюдателя информацию о необходимом количестве жидкости, чтобы настроить желаемое состояние всей системы.
известны недостаточно точно, например действует неизвестное внешнее генерализированное усилие, то сначала количество жидкости может быть задано не непосредственно. По этой причине для количества жидкости, требуемого для желаемого состояния нагрузочной системы, создан наблюдатель. Этот, в целом, нелинейный наблюдатель может быть выполнен также без измерения генерализированной скорости нагрузочной системы без нарушения при этом его функции. Сам регулятор использует известную или полученную из наблюдателя информацию о необходимом количестве жидкости, чтобы настроить желаемое состояние всей системы.
В случае если механического демпфирования нагрузочной системы недостаточно или оно должно быть подходящим образом задано, то это можно комбинировать с описанными выше способами. Для этого к исполнительному сигналу регулятора или части регулятора подходящим образом добавляется сигнал, зависимый от генерализированной скорости нагрузочной системы. Это влияние на демпфирование можно оказать также с аппроксимацией генерализированной скорости из описанного или другого подходящего наблюдателя.
Для всех приведенных вариантов регулирования в распоряжении имеется замкнутое подтверждение стабильности всей отрегулированной системы.
Корректирующий терм для учета заданного давления
Основное уравнение управляемого сервоклапаном гидроцилиндра одинарного действия достаточно известно и при определенных физических предположениях выражается, например, следующим образом:

 ,
,
где ph обозначает давление в актуированной сервоклапаном камере цилиндра, А - площадь поршня, νh - скорость поршня, qν - поток от сервоклапана в гидроцилиндр, Сl - утечка в гидроцилиндре, Е - модуль упругости гидравлического масла и Vact - масляный объем в актуированной камере. Приведенное уравнение может быть распространено и на другие варианты гидравлических актуаторов, например на цилиндр двойного действия, как это также достаточно известно из соответствующей литературы. Для изложения изобретения достаточно, однако, описать его только на примере цилиндра одинарного действия. Как видно из уравнения, изменения давления возникают, следовательно, из изменений объема за счет движений поршня, изменений сжатия масла за счет его подачи (в постоянном положении поршня), а также возможных утечек в цилиндре. Само изменение зависит, соответственно, от объема камеры и положения поршня в данный момент.
Как нетрудно видеть, основное уравнение нелинейное. Кроме того, в нем скрыта скорость поршня, которая в противоположность его положению, как правило, измеряется или может быть измерена не непосредственно. К тому же дифференцирование измеренного положения поршня на основе шума квантования и измерительного шума дает практически не пригодный для использования результат. Так, в типичных применениях в качестве непосредственных и пригодных для использования измеренных величин для линеаризации в распоряжении имеются только фактическое положение и фактическое давление актуированной гидравлической камеры.
Посредством известных из литературы нелинейных методов техники регулирования можно найти точную линеаризацию, обходящуюся этим ограниченным набором данных измерений. В таком законе регулирования может возникнуть ошибка гидравлического давления в актуированной камере относительно заданного давления  , причем это заданное давление устанавливается за счет задаваемого положения и нагрузочной системы.
, причем это заданное давление устанавливается за счет задаваемого положения и нагрузочной системы.
Эти методы и такой закон регулирования подробно описаны в следующих публикациях:
- G.Grabmair, K.Schlacher, A.Kugi (2003): «Geometric Energy Based Analysis and Controller Design of Hydraulic Actuators Applied in Rolling Mills», ECC03 CD publication, 421.pdf, Cambridge, Great Britain;
- Kugi A.: «Nonlinear Control Based on Physical Models», Lecture Notes in Control and Information Sciences 260, Springer, 2000.
Кроме того, это описано также в публикации ЕР 992295 А2 заявителя, являющейся частью данной заявки.
Если гидравлическая установка проводится при регулировании положения, то обычно это заданное значение априори неизвестно, поскольку оно, например, может сильно зависеть от априори неизвестных внешних действующих усилий или от упругостей, точное числовое значение которых неизвестно. Если это заданное значение неизвестно, то термом  следует пренебречь.
следует пренебречь.
Исследования заявителя посредством моделирований и теоретических рассуждений показали, однако, что это пренебрежение оказывает дестабилизирующее действие. С учетом этого терма замкнутый регулирующий контур имеет, напротив, лучшую демпфирующую характеристику, в результате чего регулятор может быть настроен заметно быстрее. Это можно обнаружить также путем энергетического рассмотрения всей системы, где без этого терма механическое демпфирование уменьшается.
Следующее описание изобретения показывает пути определения величины .
Для этого, прежде всего, в общем виде создается математическая модель или описывается состояние объекта регулирования, т.е. механико-гидравлической системы с одной степенью свободы. Такая общая модель может быть выведена, например, из достаточно известного и регулярно используемого в технике регулирования формализма Лагранжа, т.е. через энергетические термы. Известная функция Лагранжа L может быть записана при этом для механико-гидравлической системы с одной степенью свободы как разность кинетической и потенциальной энергий  , при этом m(q) обозначает генерализированную матрицу массы, q - генерализированные координаты,
, при этом m(q) обозначает генерализированную матрицу массы, q - генерализированные координаты,  - временнýю производную из этого, a V(q) - потенциал. С гидравлическим усилием Fh в качестве входа возникают общие уравнения состояния объекта регулирования с генерализированными координатами q и импульсом Р в качестве величин состояния, которые представляют собой базу для всех случаев применения механико-гидравлических систем с одной степенью свободы на каждый актуатор:
- временнýю производную из этого, a V(q) - потенциал. С гидравлическим усилием Fh в качестве входа возникают общие уравнения состояния объекта регулирования с генерализированными координатами q и импульсом Р в качестве величин состояния, которые представляют собой базу для всех случаев применения механико-гидравлических систем с одной степенью свободы на каждый актуатор:

 .
.
Символ ∂q обозначает при этом частичную производную по генерализированным координатам q.
Это общее представление уравнения состояния механико-гидравлической системы с одной степенью свободы следует соответствующим образом согласовать с данным случаем применения, т.е. сделать некоторые предположения, которые должны быть адаптированы к различным применениям. Нижеследующий пример без ограничения общности представляет такое согласование и алгоритм для определения .
Пример
Гидравлическая (одинарного действия) установка прокатной клети
Ниже следует исходить из гидравлической системы, воздействующей на линейную систему пружина-масса. Таким образом, возникают следующие предположения:
- масса и демпфирование не зависят от места;
- общий потенциал V(q) может быть явным образом разделен на потенциал пружины  , потенциал постоянного нагрузочного усилия Fl·q и сформулированный здесь в общем виде остаточный терм
, потенциал постоянного нагрузочного усилия Fl·q и сформулированный здесь в общем виде остаточный терм  .
.
Из этого следует общее уравнение состояния объекта регулирования:

 .
.
Это уравнение состояния является основой определения заданного давления
наблюдателем. Для этого осуществляется преобразование состояния, чтобы модель наблюдателя была линейной, благодаря чему становится возможным создание линейного наблюдателя. В качестве преобразования состояния результирующие из силы тяжести и гидравлического усилия составляющие объединяются в новый вход  . Таким образом, как описано ниже, может быть создан наблюдатель для установившегося равновесного состояния uobs. Для равновесного состояния должно быть, конечно, справедливо
. Таким образом, как описано ниже, может быть создан наблюдатель для установившегося равновесного состояния uobs. Для равновесного состояния должно быть, конечно, справедливо  . Переход от q к отклонению
. Переход от q к отклонению  , где
, где  , дает согласующийся набор уравнений состояния. Формально записывается еще и третье уравнение состояния для
, дает согласующийся набор уравнений состояния. Формально записывается еще и третье уравнение состояния для  .
.


 .
.
cl в качестве постоянной пружины нагрузочной системы (например, упругость материала) может явным образом включаться в наблюдатель, который может быть подставлен произвольно. Таким образом, наблюдатель становится робастным к колебаниям, например, упругости материала. Нагрузочное усилие предполагается здесь постоянным, чтобы можно было создать линейный наблюдатель. Одновременно достигается «интегральное действие» наблюдателя, который позволяет свести погрешность к нулю.
Это уравнение состояния наблюдателя с преобразованным состоянием uobs может быть решено для искомого установившегося равновесного состояния uobs традиционными методами техники регулирования, например с помощью уравнения наблюдателя в непрерывном виде и известной формулы Аккермана. На всех общих методах техники регулирования здесь подробно останавливаться нет необходимости, поскольку они предполагаются известными. С учетом выбранного преобразования состояния можно определить искомое установившееся равновесное давление . Определенные наблюдателем величины обозначены ниже значком ∪, например . С  и Fh=A·ph сразу же следует
и Fh=A·ph сразу же следует  чем определяется искомая величина в общем виде. Дополнительно наблюдатель дает импульс, как это видно из лежащих в основе уравнений, который также может быть использован, как это поясняется ниже.
чем определяется искомая величина в общем виде. Дополнительно наблюдатель дает импульс, как это видно из лежащих в основе уравнений, который также может быть использован, как это поясняется ниже.
Гидравлическая установка формирующего ролика моталки
Чтобы наглядно объяснить приведенные выше уравнения и продемонстрировать общезначимость с помощью механико-гидравлической системы с одной степенью свободы в виде формирующего ролика моталки поясняется другой конкретный пример. Помимо определения изображается активный ввод демпфирования. Для прижатия полосы в процессе намотки на моталку горячеполосового стана используются так называемые формирующие ролики (обычно три-четыре по окружности), как это схематично показано на фиг.1. Формирующий ролик 1 прижимает полосу посредством гидроцилиндра 3 к моталке 2, причем сервоклапан не показан. При этом как гидроцилиндр, так и кронштейн 4 формирующего ролика установлены с возможностью вращения. Поршень гидроцилиндра 3 установлен на кронштейне 4 формирующего ролика также с возможностью вращения. На фиг.2 та же система изображена абстрактно в виде механической системы пружина-масса с плечом рычага, которая используется в качестве модели для последующих рассуждений.
В отличие от предыдущего примера при выборе координат цилиндра в виде генерализированных пространственных координат q возникла бы непостоянная матрица массы. Существует общая возможность преобразования координат, которое всегда существует на основе гладкости метрики массы (метрика, созданная матрицей массы) и может быть вычислено, так что матрица массы изображается в преобразованных координатах в виде постоянной. В данном примере это простым образом достигается за счет чисто геометрического преобразования до α, т.е. угла установки формирующего ролика.
В целом, однако, это преобразование координат (и преобразование управляющей величины до  ) необязательно должно осуществляться явным образом, если они неявно учитываются в нелинейном виде наблюдателя, что возможно, поскольку замкнутая система дифференциальных уравнений для нелинейного наблюдателя имеет место в общих координатах. В этом виде наблюдателя можно работать также с непостоянной матрицей массы.
) необязательно должно осуществляться явным образом, если они неявно учитываются в нелинейном виде наблюдателя, что возможно, поскольку замкнутая система дифференциальных уравнений для нелинейного наблюдателя имеет место в общих координатах. В этом виде наблюдателя можно работать также с непостоянной матрицей массы.
В этом примере, однако, преобразования координат и регулирующей величины представлены явно.
Для общих уравнений состояния объекта регулирования для конкретного применения делаются следующие предположения:
- q=α, угол установки формирующего ролика используется в виде пространственной координаты (преобразование координат), откуда следует  , где ω обозначает угловую скорость;
, где ω обозначает угловую скорость;
- m(q) соответствует зависимой в общем виде от пространственной координаты q матрицы массы, которая может быть принципиально использована для создания наблюдателя. Как уже сказано, в этом примере оптимальным образом и для наглядности с q=α угол установки выбирается в виде пространственной координаты, в результате чего m(q) соответствует инерционному моменту Θ формирующего ролика и является постоянным, из чего следует ∂qm(q)=0;
- d(q)=d=const, следовательно, демпфирование не зависит от положения;
- потенциал V складывается из постоянного нагрузочного момента Мl и силы тяжести. В принципе, и здесь аналогично вышесказанному можно учесть упругость сl;
 .
.
Эти предположения приводят к следующим уравнениям:
 .
.

Из геометрических отношений абстрактной системы пружина-масса можно вывести другие отношения и дальше преобразовать приведенное уравнение. На фиг.3 изображен возможный вариант, включающий в себя геометрические величины, которые могут быть привлечены.
 соответствует, как уже сказано, потенциалу силы тяжести.
соответствует, как уже сказано, потенциалу силы тяжести.
Преобразование управляющей величины до нового входа uobs осуществляется в виде  , что в этом конкретном примере приводит к
, что в этом конкретном примере приводит к  . Равновесное состояние при
. Равновесное состояние при  снова дает
снова дает  , или в более общем виде при упругости сl следует
, или в более общем виде при упругости сl следует  .
.
С формальным вводом нового состояния  и с переходом на относительные координаты для q возникают следующие окончательные уравнения для наблюдателя:
и с переходом на относительные координаты для q возникают следующие окончательные уравнения для наблюдателя:


 .
.
С помощью этого уравнения можно снова определить состояние . За счет возврата генерализированных координат к измеренным координатам, здесь хh, можно снова определить .
Этот метод, представленный сначала в общем виде, а затем на конкретном примере, показывает, как установившееся равновесное давление может определяться посредством наблюдателя и предшествующего преобразования состояния. Этот метод может аналогично применяться во всех механико-гидравлических системах с одной степенью свободы на каждый гидравлический актуатор, причем необходимо лишь учитывать геометрические и механические взаимосвязи в соответствующей системе.
Как уже сказано, наблюдатель дает не только установившееся равновесное давление  , но и импульс
, но и импульс  , из которого с помощью отношения
, из которого с помощью отношения 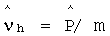 можно легко определить неизмеряемую скорость поршня, которая также имеется в распоряжении и которую, при необходимости, также можно использовать.
можно легко определить неизмеряемую скорость поршня, которая также имеется в распоряжении и которую, при необходимости, также можно использовать.
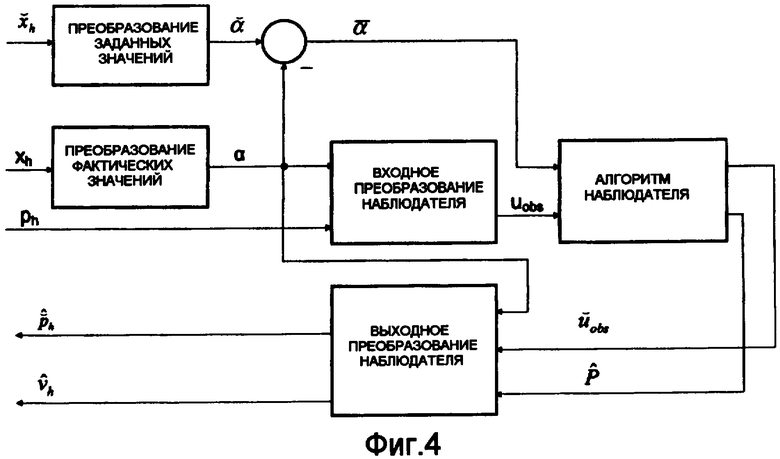
На фиг.4 еще раз описаны приведенные взаимосвязи для наблюдателя с помощью схемы наблюдателя. Сам наблюдатель использует входные и выходные величины, отличающиеся от фактически измеряемых или требуемых. Во-первых, измеряемая входная величина в виде положения хh преобразуется с помощью геометрических отношений до угла α. Далее необходимо преобразование состояния наблюдателя до нового состояния uobs. Из полученных величин  и uobs наблюдатель определяет состояние
и uobs наблюдатель определяет состояние  и импульс
и импульс  . Из и
. Из и  следует установившееся равновесное давление
следует установившееся равновесное давление  , а из импульса
, а из импульса  можно легко определить скорость
можно легко определить скорость  .
.
Ввод (параметрируемого) активного демпфирования
Гидроцилиндр с сервоклапаном в качестве управления имеет, как известно, интегральную характеристику. Также известно, что в механической системе терм демпфирования пропорционален скорости. Чтобы ввести демпфирование в интегральный объект, необходимо подключить, следовательно, пропорциональную ускорению величину. Это может происходить непосредственно за счет измерения ускорения и его подключения через демпфирующее звено с демпфированием  к актуатору (сервоклапану), как это достаточно известно.
к актуатору (сервоклапану), как это достаточно известно.
В изобретении было установлено, что демпфирование возникает, если к отрегулированному гидравлическому объекту с интегральной характеристикой подключить пропорциональную скорости величину. Оказалось, что при определенных ограничениях параметров возникает «дифференцирующее действие». Решающим для этого является отношение между демпфированием kd и пропорциональным усилением kp регулятора. При этом в целом справедливо kd>kp, a kp следует выбирать так, чтобы были выполнены определенные критерии стабильности. Можно, конечно, не указывать абсолютного, общезначимого отношения kd>kp, поскольку оно зависит от фактических условий объекта. Эти параметры следует поэтому согласовать с объектом, например, посредством опытов или моделирования с традиционными программами, например MAT LAB. Поскольку скорость также является выходной величиной наблюдателя, можно благодаря этому факту очень легко ввести в систему дополнительное демпфирование, что весьма предпочтительно скажется на регулировании системы.
Эти взаимосвязи поясняются с помощью блок-схемы регулирования на фиг.5.
Объект регулирования образован механико-гидравлической системой с одной степенью свободы на каждый гидравлический актуатор, представленной на фиг.5 гидроцилиндром 3 с управлением через сервоклапан 5. Последний может управлять цилиндром одинарного действия или цилиндром двойного действия, обозначенным двойной штриховой линией. Точно так же возможны другие конструктивные формы гидроцилиндров или другие основанные на гидравлическом принципе актуаторы. На гидроцилиндре 3 предусмотрены датчик 6 давления, датчик 7 ускорения и датчик 8 положения, которые формируют подходящие фактические измерительные сигналы для регулирования.
Регулирование, описанное заявителем в ЕР 992295 А2, основано на описанном выше преобразовании состояния для заданной, фактической и управляющей величин, чтобы можно было реализовать линейный регулятор. Регулятор R, как это известно из техники регулирования, может быть, например, любой передаточной функцией (в простейшем случае, например, пропорциональным звеном с пропорциональным усилением kp). Сервоклапан 5 имеет обычно нелинейную характеристику, которую можно было бы компенсировать посредством известной сервокомпенсации. Закон этого традиционного регулирования уже описан выше. Если регулирование должно осуществляться в виде позиционного регулирования, то следует разомкнуть выключатели S2, S4 и замкнуть выключатель S3. Выключатели S1-S4 необязательно должны быть буквально электромеханическими, а могут быть реализованы также только в софте.
При регулировании гидравлического усилия Fh для возможной формы реализации регулятора преобразование заданного и фактического значений является излишним и может быть активировано за счет переключения выключателя S1 на силовой вход, замыкания выключателя S2 и размыкания выключателя S3. Это значит, что отклонение положения отключается и заданные и фактические значения давления могут быть непосредственно заданы.
Элементы C1, С2, С3, C4 обеспечивают согласование своих соответствующих входов и представляют собой в своем самом общем виде функции с входом и, при необходимости, другими величинами в качестве параметров. Они могут быть упрощенно (линейными) динамическими системами или, в простейшем случае, пропорциональным коэффициентом.
Это уже известное регулирование может быть легко расширено, если учитывать терм , для чего выключатель S1 переключается на вход давления, а выключатели S2, S3 замыкаются.
Наблюдатель создает при этом установившееся равновесное давление  как это описано выше в общем виде и на конкретных примерах. Этим в регулирование вводится дополнительное демпфирование.
как это описано выше в общем виде и на конкретных примерах. Этим в регулирование вводится дополнительное демпфирование.
В систему может быть введено другое дополнительное демпфирование за счет переключения выключателя S4 через С3 и C4 соответственно, либо на демпфирование, пропорциональное скорости, либо на демпфирование, пропорциональное ускорению. При пропорциональном скорости демпфировании наблюдатель создает скорость  . С3 обеспечивает, например, динамическое согласование наблюдаемого сигнала как в отношении оптимальной характеристики сигнала, так и в отношении согласования степени введенного демпфирования (в простейшем случае С3 соответствует пропорциональному терму kd, как описано выше). При демпфировании, пропорциональном скорости, датчик 7 ускорения задает необходимое ускорение. C4 выполняет ту же задачу, что и С3 (также в простейшем случае пропорциональный терм
. С3 обеспечивает, например, динамическое согласование наблюдаемого сигнала как в отношении оптимальной характеристики сигнала, так и в отношении согласования степени введенного демпфирования (в простейшем случае С3 соответствует пропорциональному терму kd, как описано выше). При демпфировании, пропорциональном скорости, датчик 7 ускорения задает необходимое ускорение. C4 выполняет ту же задачу, что и С3 (также в простейшем случае пропорциональный терм  ). Если такой датчик 7 ускорения отсутствует, то эта часть регулирования также может отсутствовать.
). Если такой датчик 7 ускорения отсутствует, то эта часть регулирования также может отсутствовать.
Из этого следует, что регулятор в зависимости от потребности может эксплуатироваться в нескольких разных режимах. Передаточные функции C1, C2, С3, С4, R также могут быть разными для разных режимов.
Описанное выше регулирование может быть особенно предпочтительно реализовано в регулирующем блоке, например компьютере. Необходимые величины, такие как гидравлическое давление ph, положение хh цилиндра или задаваемые величины, а также гидравлическое усилие (для регулирования усилия) регистрируются измерительными датчиками и подаются на регулирующий блок в качестве входных величин. Выходной величиной регулирующего блока является обычно управляющий сигнал для сервоклапана, поток qν через сервоклапан или положение xs поршня сервоклапана.
В принципе, посредством описанного регулирования можно управлять любой механико-гидравлической системой с одной степенью свободы на гидравлический актуатор с повышенной стабильностью и демпфированием, и изобретение не ограничивается описанными здесь случаями применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПРИВОДА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 1998 |
|
RU2222097C2 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1989 |
|
SU1667972A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ВОЗДУШНЫМ УСТРОЙСТВОМ И ВОЗДУШНОЕ УСТРОЙСТВО С КОНТРОЛЛЕРОМ, ОСУЩЕСТВЛЯЮЩИМ ЭТОТ СПОСОБ | 2015 |
|
RU2695006C2 |
| Способ испытаний систем и приборов космического назначения в условиях имитации невесомости | 2023 |
|
RU2823384C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СИСТЕМА ФУНКЦИОНАЛЬНОГО УПРАВЛЕНИЯ ЧЕРВЯЧНЫМ ЭКСТРУДЕРОМ | 2008 |
|
RU2353518C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2651812C2 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2649306C1 |
Предложены способ регулирования и регулятор для механико-гидравлической системы с одной степенью свободы на каждый гидроцилиндр в качестве объекта регулирования, содержащий измерительный датчик (6) для измерения давления ph в гидроцилиндре (3) и измерительный датчик (8) для измерения положения xh поршня гидроцилиндра (3), причем предусмотрен регулирующий блок с входными величинами - гидравлическое давление ph и положение xh гидроцилиндра, в регулирующем блоке реализован наблюдатель для определения заданного давления в гидравлической системе и скорости vh гидроцилиндра (3), в законе регулирования регулятора учитывают заданное давление, и к регулированию может быть подключена скорость vh гидроцилиндра в виде демпфирования. 2 н. и 12 з.п. ф-лы, 5 ил.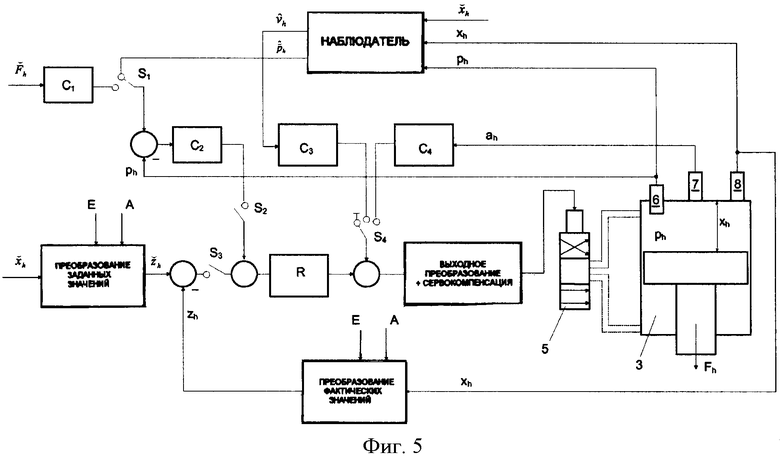
1. Способ регулирования механико-гидравлической системы с одной степенью свободы на каждый гидравлический актуатор в качестве объекта регулирования, отличающийся тем, что при регулировании учитывают заданное давление  гидравлической системы преимущественно в виде терма
гидравлической системы преимущественно в виде терма  и к регулированию подключают скорость vh гидравлического актуатора (3) в виде демпфирования, причем заданное значение
и к регулированию подключают скорость vh гидравлического актуатора (3) в виде демпфирования, причем заданное значение  и скорость vh гидравлического актуатора определяют посредством наблюдателя и скорость vh гидравлического актуатора подключают к выходному сигналу регулятора (R).
и скорость vh гидравлического актуатора определяют посредством наблюдателя и скорость vh гидравлического актуатора подключают к выходному сигналу регулятора (R).
2. Способ по п.1, отличающийся тем, что для наблюдателя используют математическую модель объекта регулирования, в которой входную величину подвергают преобразованию управляющей величины до новой входной величины uobs, так что математическая модель объекта регулирования для наблюдателя становится линейной.
3. Способ по п.2, отличающийся тем, что механическую нагрузочную систему изображают в виде математической модели, причем систему уравнений изображают методами аналитической механики, например, с помощью формализма Лагранжа
 ,
,
где  - временная производная из генерализированной координаты;
- временная производная из генерализированной координаты;
ν - скорость;
Р - импульс;
m - масса;
 - производная;
- производная;
∂q - частичная производная по генерализированным координатам;
m(q) - генерализированная матрица массы;
V - потенциал;
xh - положение гидравлического актуатора;
Fh - гидравлическое усилие.
4. Способ по п.3, отличающийся тем, что при непостоянной матрице массы для создания наблюдателя преобразование координат и управляющих величин (например, до нового входа  ) осуществляют так, что в преобразованных координатах матрица массы представляется в виде постоянной.
) осуществляют так, что в преобразованных координатах матрица массы представляется в виде постоянной.
5. Способ по п.1, отличающийся тем, что при непостоянной матрице массы используют нелинейного наблюдателя, в котором неявным образом учитывают преобразование координат и управляющих величин по п.4.
6. Способ по одному из пп.1-5, отличающийся тем, что заданное давление определяют по выявленному посредством наблюдателя в смысле наблюдателя управляющих величин состоянию  путем обратного преобразования.
путем обратного преобразования.
7. Способ по одному из пп.1-5, отличающийся тем, что с помощью наблюдателя определяют импульс  а из него - скорость
а из него - скорость 
8. Способ по п.6, отличающийся тем, что с помощью наблюдателя определяют импульс  а из него - скорость
а из него - скорость 
9. Способ по п.1, отличающийся тем, что скорость vh гидравлического актуатора в комбинации с общей передаточной функцией (С3) (например, в простейшем случае пропорциональный терм kd) подключают к замкнутому регулирующему контуру.
10. Способ по п.1, отличающийся тем, что измеренное ускорение ah гидравлического актуатора в комбинации с общей передаточной функцией (C4) подключают к регулированию.
11. Регулятор для механико-гидравлической системы с одной степенью свободы на каждый гидравлический актуатор в качестве объекта регулирования, содержащий измерительный датчик (6) для измерения давления ph в гидравлической системе, например гидроцилиндре (3), и измерительный датчик (8) для измерения положения xh гидравлического актуатора, например поршня гидроцилиндра (3), отличающийся тем, что предусмотрен регулирующий блок с входными величинами - гидравлическое давление ph и положение xh гидравлического актуатора, в регулирующем блоке реализован наблюдатель для определения заданного давления  в гидравлической системе и скорости vh гидравлического актуатора (3), в законе регулирования регулятора учитывают заданное давление
в гидравлической системе и скорости vh гидравлического актуатора (3), в законе регулирования регулятора учитывают заданное давление  преимущественно в виде терма
преимущественно в виде терма  , и скорость vh гидравлического актуатора в виде демпфирования может быть подключена к регулированию, причем это осуществляют на выходе регулятора (R).
, и скорость vh гидравлического актуатора в виде демпфирования может быть подключена к регулированию, причем это осуществляют на выходе регулятора (R).
12. Регулятор по п.11, отличающийся тем, что измеренное ускорение ah гидравлического актуатора в комбинации с общей передаточной функцией (C4) может быть подключено к регулированию.
13. Регулятор по п.11, отличающийся тем, что скорость vh гидравлического актуатора в комбинации с общей передаточной функцией (С3) может быть подключена к замкнутому регулирующему контуру.
14. Регулятор по одному из пп.11-13, отличающийся тем, что он выполнен с возможностью возвратно-поступательного переключения между несколькими режимами регулирования, в которых подключают различные демпфирования.
| ЕР 1152155 А2, 07.11.2001 | |||
| US 4502109 А, 26.02.1985 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ И РЕГУЛИРОВКИ РАБОЧИХ ЦИЛИНДРОВ | 1999 |
|
RU2216652C2 |
| Электрогидравлический усилитель мощности | 1988 |
|
SU1587231A1 |
| Электрогидравлическое следящее устройство | 1960 |
|
SU134533A1 |

