Предложенное изобретение исходит из регулирующего устройства для регулирования положения блока гидравлического цилиндра, причем регулирующее устройство содержит регулятор, который со стороны входа воспринимает номинальное положение поршня блока гидравлического цилиндра и фактическое положение поршня, на основе разности между номинальным положением и фактическим положением определяет регулирующее воздействие для блока управления клапаном блока гидравлического цилиндра и выдает определенное регулирующее воздействие на блок управления клапаном, так что поршень перемещается со скоростью регулирующего воздействия.
Блоки гидравлического цилиндра демонстрируют регулировочную характеристику, которая сильно зависит от рабочей точки блока гидравлического цилиндра. Регулятор положения, который был оптимизирован для определенной рабочей точки, работает при другой рабочей точке менее хорошо или неудовлетворительно.
Для улучшения регулировочной характеристики в уровне техники известно, что в качестве регулировочной характеристики регулятора предусматривается так называемая кривая в форме бабочки. Однако кривая в форме бабочки не перекрывает все пространство возможных рабочих точек и поэтому работает не в каждом рабочем состоянии оптимальным образом.
Кроме того, для регуляторов положения для блоков гидравлических цилиндров известно, что для номинального положения и фактического положения независимо одно от другого предпринимается соответствующее нелинейное преобразование, и дополнительно осуществляется частичная линеаризация регулятора положения. Этот способ действий является весьма затратным.
Задача настоящего изобретения состоит в том, чтобы создать возможности, посредством которых максимально простым способом может достигаться оптимальная регулировочная характеристика.
Эта задача решается регулирующим устройством с признаками пункта 1 и пункта 3 формулы изобретения, модулем программного обеспечения с признаками пункта 8 формулы изобретения и носителем данных с признаками пункта 9 формулы изобретения. Пункты 2 и 4-7 относятся к предпочтительным вариантам осуществления регулирующего устройства. Пункт 10 определяет предпочтительное применение соответствующего изобретению регулирующего устройства.
В соответствии с изобретением регулятор определяет предварительное регулирующее воздействие. Кроме того, за регулятором расположен блок линеаризации, который умножает предварительное регулирующее воздействие на коэффициент линеаризации и выдает предварительное регулирующее воздействие, умноженное на коэффициент линеаризации, в качестве окончательного регулирующего воздействия на блок управления клапаном. Блок линеаризации определяет коэффициент линеаризации динамически как функцию фактического положения поршня, а также рабочих давлений, имеющих место по обе стороны от поршня, а также со стороны притока и оттока блока управления клапаном. Блок линеаризации определяет коэффициент линеаризации таким образом, что отношение скорости регулирующего воздействия к разности номинального положения и фактического положения является независимым от фактического положения поршня и рабочих давлений. При этом регулятор предпочтительным образом выполнен в виде Р-регулятора (пропорционального регулятора).
В специальном случае, когда регулятор выполнен в виде Р-регулятора, последовательность размещения регулятора и блока линеаризации может быть обратной. В этом случае блок линеаризации умножает разность номинального положения и фактического положения на коэффициент линеаризации и подает умноженную разность на регулятор в качестве его входной величины. Однако способ определения коэффициента линеаризации остается неизменным.
Как правило, блок линеаризации для определения коэффициента линеаризации применяет в качестве дополнительных данных данные производительности блока управления клапаном, эффективные рабочие поверхности по обе стороны от поршня и минимально возможные эффективные объемы по обе стороны от поршня. Дополнительные данные могут при этом задаваться постоянными блоку линеаризации. Однако предпочтительным образом блок линеаризации воспринимает дополнительные данные, по меньшей мере частично, как параметры.
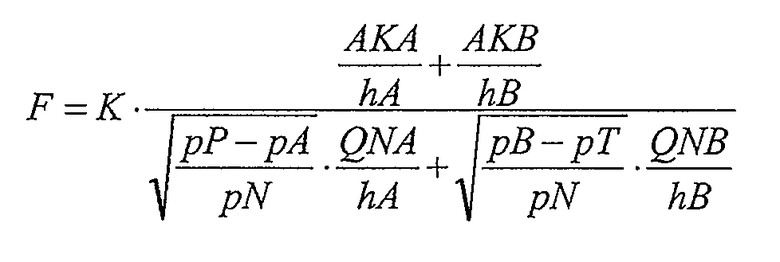
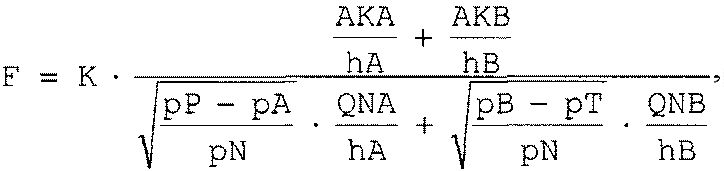
Предпочтительным образом блок линеаризации определяет коэффициент линеаризации согласно соотношению:
Используемые в вышеприведенном уравнении величины имеют при этом следующее значение:
F - коэффициент линеаризации,
K - свободно выбираемый постоянный масштабный коэффициент,
AKA - рабочая поверхность поршня, обращенная к увеличивающемуся рабочему объему,
AKB - рабочая поверхность поршня, обращенная к уменьшающемуся рабочему объему,
pA - рабочее давление, которое действует на рабочую поверхность поршня, обращенную к увеличивающемуся рабочему объему,
pB - рабочее давление, которое действует на рабочую поверхность поршня, обращенную к уменьшающемуся рабочему объему,
pP - рабочее давление со стороны притока блока управления клапаном,
pT - рабочее давление со стороны оттока блока управления клапаном,
pN - номинальное давление блока управления клапаном,
QNA - номинальный объемный поток, который втекает в увеличивающийся рабочий объем, когда разность между рабочим давлением со стороны притока блока управления клапаном и рабочим давлением в увеличивающемся рабочем объеме равна номинальному давлению,
QNB - номинальный объемный поток, который вытекает из уменьшающегося рабочего объема, когда разность между рабочим давлением в уменьшающемся рабочем объеме и рабочим давлением со стороны оттока блока управления клапаном равна номинальному давлению,
hA - отношение между увеличивающимся рабочим объемом и обращенной к этому рабочему объему рабочей поверхностью, причем увеличивающийся рабочий объем определяется на основе фактического положения поршня и минимально возможного для этой стороны поршня эффективного объема, и
hB - отношение между уменьшающимся рабочим объемом и обращенной к уменьшающемуся рабочему объему рабочей поверхностью, причем уменьшающийся рабочий объем определяется на основе фактического положения поршня и минимально возможного для этой стороны поршня эффективного объема.
Регулирующее устройство может быть выполнено как структура аппаратных средств. Предпочтительным образом, однако, оно выполняется как программируемое программным обеспечением регулирующее устройство, которое программируется модулем программного обеспечения, так что оно на основе программирования модулем программного обеспечения выполняется в соответствии с изобретением.
Модуль программного обеспечения содержит машинный код, обработка которого связанным с блоком гидравлического цилиндра регулирующим устройством, программируемым программным обеспечением, вызывает то, что регулирующее устройство выполняется, как описано выше. Модуль программного обеспечения может сохраняться в машиночитаемой форме на носителе данных.
В принципе соответствующее изобретению регулирующее устройство является универсально применимым. Однако предпочтительным образом оно применяется для регулирования установки прокатной клети.
Другие преимущества и детали представлены в последующем описании примеров выполнения со ссылками на чертежи, на которых показано следующее:
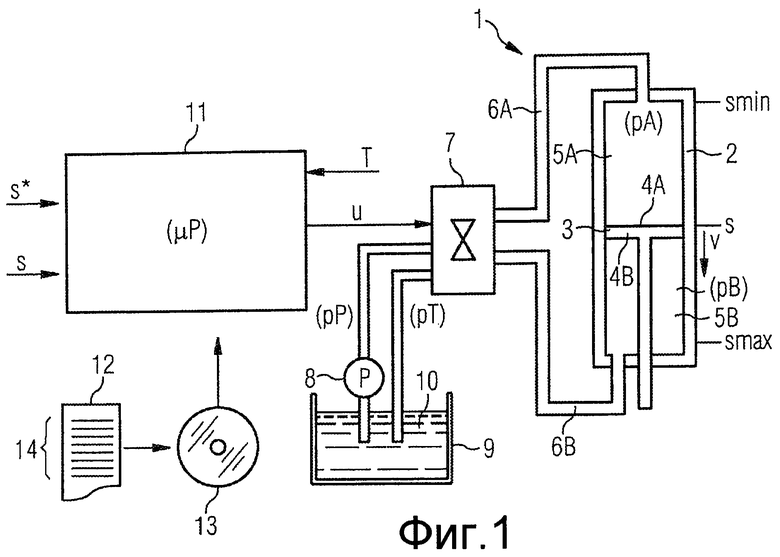
Фиг.1 - блок-схема регулирующего устройства и блока гидравлического цилиндра,
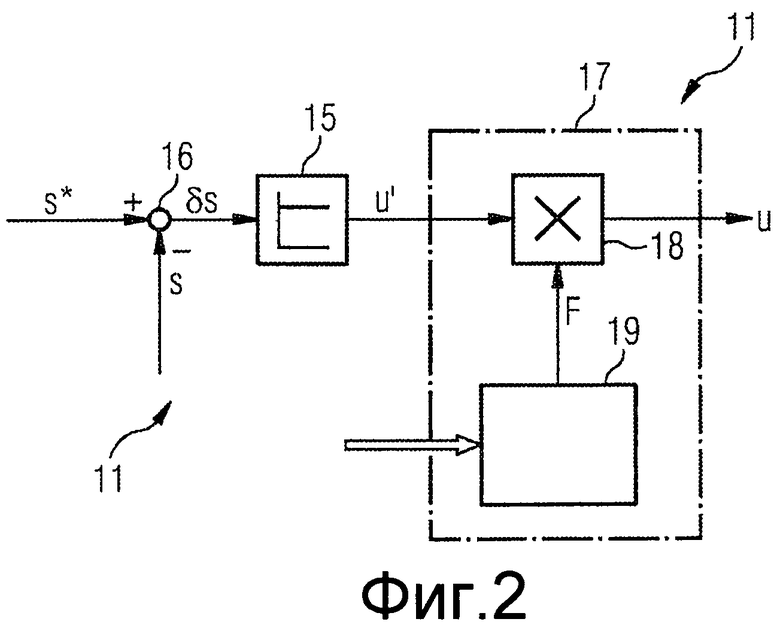
Фиг.2 - первая форма выполнения регулирующего устройства,
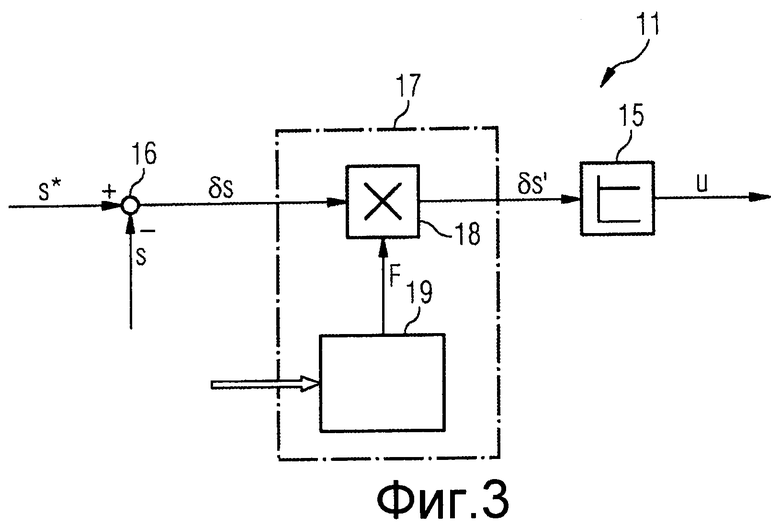
Фиг.3 - вторая форма выполнения регулирующего устройства,
Фиг.4 - устройство определения блока линеаризации,
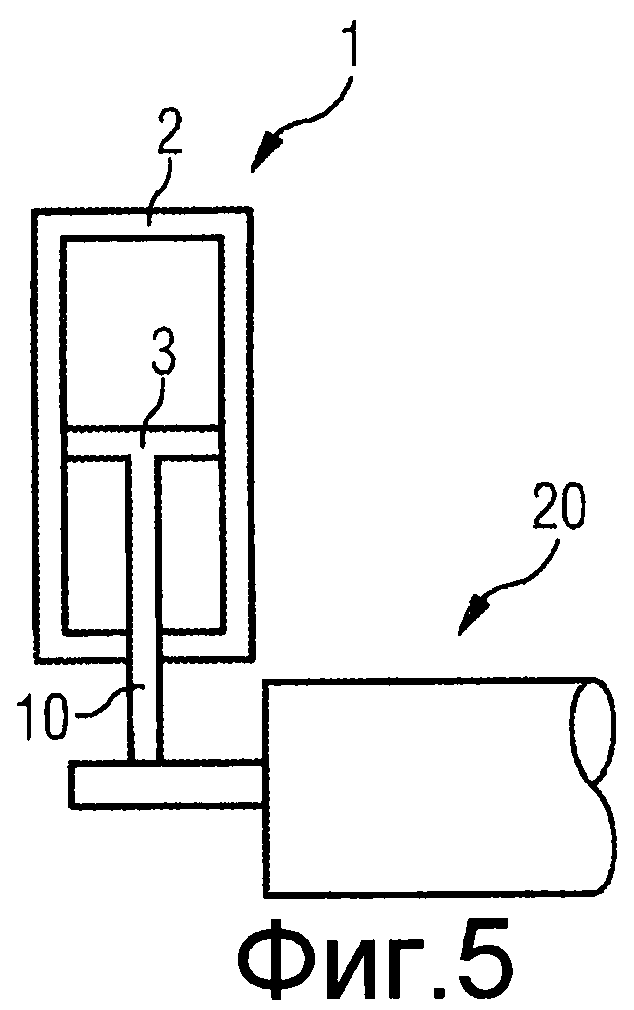
Фиг.5 - устройство установки для валка прокатной клети.
Согласно фиг.1, блок 1 гидравлического цилиндра содержит гидравлический цилиндр 2, в котором с возможностью перемещения установлен поршень 3. Поршень 3 может перемещаться внутри гидравлического цилиндра 1 между минимальным положением smin и максимальным положением smax. Он находится, таким образом, в каждый момент времени в фактическом положении s, которое располагается между минимальным положением smin и максимальным положением smax.
Поршень 3 имеет первую рабочую поверхность 4А и вторую рабочую поверхность 4В. Каждая рабочая поверхность 4А, 4В обращена к соответствующему рабочему объему 5А, 5В.
Рабочие объемы 5А, 5В через гидравлические тракты 6А, 6В и блок 7 управления клапаном гидравлически связаны с гидравлическим насосом 8 и гидравлическим резервуаром 9. Гидравлические тракты 6А, 6В проходят при этом от соответствующего рабочего объема 5А, 5В до блока 7 управления клапаном.
Если поршень находится в своем минимальном положении smin, то в гидравлическом тракте 6А находится определенный объем гидравлической жидкости 10. Этот объем является минимальным количеством гидравлической жидкости 10, которое находится между блоком 7 управления клапаном и рабочей поверхностью 4А поршня 3. Это количество гидравлической жидкости 10 является минимально возможным эффективным объемом для рабочего объема 5А. Он обозначен далее VminA.
Аналогичным образом, в гидравлическом тракте 6В находится определенный объем гидравлической жидкости 10, если поршень находится в своем максимальном положении smax. Это количество гидравлической жидкости 10 представляет собой минимально возможный эффективный объем для рабочего объема 5В. Этот минимальный объем обозначен далее VminB.
Если поршень находится в любом фактическом положении s, то рабочий объем 5А имеет значение объема VA, которое задается как
VA = VminA + AKA (s - smin)
Условным обозначением АKА здесь обозначено значение площади для рабочей площади 4А поршня, обращенной к рабочему объему 5А.
Эффективный объем VA можно поделить на значение площади АKА. Отношение
hA = VA/AKA
соответствует эффективной высоте столба гидравлической жидкости 10 над поршнем 3.
Аналогичным образом, можно определить соответствующие значения VB и hB для второй рабочей поверхности 4В или второго рабочего объема 5В на основе минимально возможного эффективного объема VminB, значения площади АKВ для рабочей поверхности 4В, обращенной к рабочему объему 5В, и максимального положения smax, согласно соотношениям:
VB = VminB + AKB (smax - s)
и
hB = VB/AKB
В рабочем объеме 5А существует первое рабочее давление рА, во втором рабочем объеме 5В - второе рабочее давление рВ. Посредством насоса 8 гидравлическая жидкость 10 нагружается напором насоса рР. В гидравлическом резервуаре 9 существует давление бака рТ. Напор насоса рР и давление бака рТ соответствуют рабочему давлению, существующему со стороны притока и со стороны оттока блока 7 управления клапаном.
Блок 7 управления клапаном в данном случае выполнен как четырехходовой клапан. Посредством четырехходового клапана соответствующий из обоих рабочих объемов 5А, 5В альтернативно нагружается напором насоса рР или давлением бака рТ. В качестве альтернативы, блок 7 управления клапаном мог бы также быть выполнен как двухходовой клапан. В этом случае один из обоих рабочих объемов 5А, 5В нагружался бы постоянным давлением, например, половиной напора насоса рР. Другой из рабочих объемов 5А, 5В может в этом случае альтернативно нагружаться напором насоса рР или давлением бака рТ.
Блок 7 управления клапаном и с ним весь блок 1 гидравлического цилиндра регулируются посредством регулирующего устройства 11. Поршень при этом регулируется по положению. Регулирующее устройство 11 предпочтительным образом выполнено согласно фиг.1 как программируемое программным обеспечением регулирующее устройство 11. Регулирующее устройство 11 программируется при этом с помощью модуля 12 программного обеспечения. Модуль 12 программного обеспечения может подаваться на регулирующее устройство 11, например, с помощью носителя 13 данных, на котором модуль 12 программного обеспечения сохранен в машиночитаемой форме. В качестве носителя 13 данных может использоваться в принципе любой носитель данных. На фиг.1 в качестве примера показан CD-ROM 13.
Модуль 12 программного обеспечения содержит машинный код 14, который может исполняться регулирующим устройством 11. Обработка машинного кода 14 посредством регулирующего устройства 11 обуславливает то, что регулирующее устройство 11 регулирует блок 1 гидравлического цилиндра таким образом, как описано более подробно ниже. Программирование регулирующего устройства 11 с помощью модуля 12 программного обеспечения обуславливает соответствующее выполнение регулирующего устройства 11.
На регулирующее устройство 11 согласно фиг.1 сначала подается номинальное положение s* поршня 3 и фактическое положение s поршня 3. Регулирующее устройство 11 определяет затем, как пояснено ниже, регулирующее воздействие u для блока 7 управления клапаном и выдает регулирующее воздействие u на блок 7 управления клапаном. Регулирующее устройство 11 осуществляет тем самым регулирование положения блока 1 гидравлического цилиндра (точнее поршня 3).
Регулирующее устройство 11 выполнено предпочтительным образом согласно фиг.2. Согласно фиг.2, регулирующее устройство 11 содержит регулятор 15, который на стороне входа воспринимает номинальное положение s* и фактическое положение s. В узловой точке 16 формируется разность δs из номинального положения s* и фактического положения s. Эта разность далее обозначается как регулирующая разность δs.
Регулирующая разность δs подается на регулятор 15, который на основе регулирующей разности δs определяет предварительное регулирующее воздействие u' для блока 7 управления клапаном. Регулятор 15 выполнен при этом согласно фиг.2 предпочтительно как Р-регулятор.
После регулятора расположен блок 17 линеаризации. Блок 17 линеаризации содержит при этом перемножитель 18 и устройство 19 определения. Устройство 19 определения определяет, как описано ниже, коэффициент F линеаризации и выдает коэффициент F линеаризации на перемножитель 18. Перемножитель 18 воспринимает еще от регулятора 15 предварительное регулирующее воздействие u' и умножает предварительное регулирующее воздействие u' на коэффициент F линеаризации. Блок 17 линеаризации определяет, таким образом, окончательное регулирующее воздействие u, которое выдается на блок 7 управления клапаном.
Блок 7 управления клапаном регулируется согласно переданному на него регулирующему воздействию u. Тем самым обеспечивается то, что поршень 3 перемещается или устанавливается со скоростью v регулирующего воздействия.
В варианте осуществления по фиг.2 регулятор 15 может быть, в принципе, любым регулятором. Однако вариант осуществления регулятора 15 как Р-регулятора является, как правило, достаточным и предпочтительным.
В качестве альтернативы выполнению по фиг.2, в соответствии с фиг.3 возможно поменять местами последовательность регулятора 15 и блока 17 линеаризации. В этом случае выполнение регулятора 15 как Р-регулятора является обязательным. В остальном способ действия в варианте выполнения согласно фиг.3 полностью аналогичен выполнению по фиг.2. Поэтому детальное пояснение фиг.3 не требуется.
Устройство 19 определения блока 17 линеаризации определяет коэффициент F линеаризации динамически как функцию фактического положения s поршня 3, рабочих давлений pA, pB, имеющих место по обе стороны от поршня 3, а также рабочих давлений рР, рТ, имеющих место со стороны притока и оттока блока 7 управления клапаном. Устройство 19 определения определяет коэффициент F линеаризации таким образом, что отношение скорости v регулирующего воздействия к разности δs номинального положения s* и фактического положения s является независимым от фактического положения s поршня и рабочих давлений pA, pB, pP, pT.
Способ действия устройства 19 определения далее детально поясняется со ссылками на фиг.4.
Регулирующее устройство 11 обычно тактируется с рабочим тактом Т. С частотой рабочего такта Т регулирующее устройство 11 воспринимает, соответственно, новое номинальное положение s* и новое фактическое положение s, определяет регулирующее воздействие u и выдает регулирующее воздействие u на блок 7 управления клапаном.
Также с рабочим тактом Т, в качестве исключения также с меньшим вспомогательным тактом Т' (таким образом, с тактом Т', который имеет меньшую частоту, чем рабочий такт Т), на устройство 19 определения подается, соответственно, новое значение для фактического положения s и рабочие давления pA, pB. Кроме того, на устройство 19 определения подается знак регулирующей разности δs. При этом подача с тактом этих величин s, pA, pB, δs на фиг.4 указана тем, что перед устройством 19 определения расположен регистр-защелка 19', который тактируется с рабочим тактом Т (или с вспомогательным тактом Т').
Напор насоса рР и давление бака рТ, как правило, постоянны. Поэтому возможно эти оба давления рР и рТ подать на устройство 19 определения однократно. В качестве альтернативы, однако, также возможно рабочее давление рР со стороны притока и рабочее давление рТ со стороны оттока подавать на устройство 19 определения путем тактирования, таким образом, как переменные.
Как правило, устройство 19 определения для точного расчета коэффициента F линеаризации требует дополнительных данных. Дополнительные данные включают в себя, как правило, данные производительности pN, QNA, QNB блока 7 регулирования клапана, эффективные рабочие поверхности АKА, АKВ по обе стороны поршня 3, а также минимально возможные объемы VminA, VminB по обе стороны от поршня. Эти значения могут быть жестко заданы устройству 19 определения, например, посредством модуля 12 программного обеспечения. В качестве альтернативы, дополнительные данные могут задаваться - по меньшей мере частично - устройству 19 определения согласно программированию регулирующего устройства 11 в качестве параметров (т.е. в рамках пуска в действие регулирующего устройства 11), которые во время работы регулирующего устройства 11 должны сохраняться неизменными.
Коэффициент F линеаризации зависит от направления движения поршня 3, то есть от направления, в котором 3 должен сдвигаться поршень. Коэффициент F линеаризации, тем самым, зависит от знака регулирующей разности δs. Далее принимается, что поршень 3 должен перемещаться в положительном направлении, то есть в направлении к максимальному положению smax. В этом случае устройство 19 определения определяет коэффициент F линеаризации предпочтительно следующим образом:
Применяемые в приведенной выше формуле величины, за исключением данных производительности pN, QNA, QNB блока 7 регулирования клапана, уже определены. Данные производительности pN, QNA и QNB блока 7 регулирования клапана имеют следующее значение.
pN - (принципиально любое) номинальное давление. Оно соответствует опорному давлению, по которому нормированы величины QNA, QNB.
QNA - номинальный объемный поток, который течет в рабочий объем 5А, если разность между напором насоса рР и рабочим давлением рА в рабочем объеме 5А равна номинальному давлению pN.
QNB - номинальный объемный поток, который течет из рабочего объема 5В, если разность между рабочим давлением рВ и давлением в баке рТ равна номинальному давлению pN.
Как уже упомянуто, коэффициент F линеаризации является зависимым от направления. В случае, когда насос 3 должен сдвигаться в противоположном направлении, получается коэффициент F линеаризации согласно формуле:
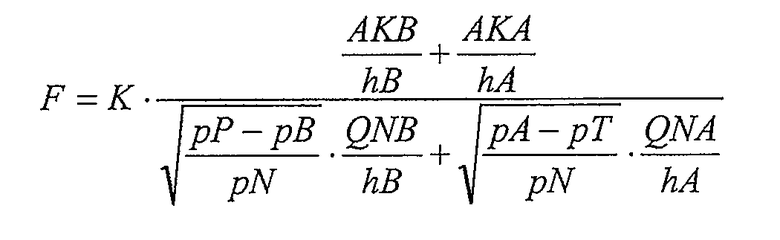
В пункте 6, однако, корректным образом приведена только одна формула, так как пункт 6 сформулирован зависимым от направления. Устройство 19 определения, напротив, вычисляет предпочтительно оба значения и выбирает на основе знака регулирующей разности δs корректный коэффициент F линеаризации.
Соответствующее изобретению устройство из блока 1 гидравлического цилиндра может использоваться в принципе любым образом. Предпочтительным образом оно применяется, однако, согласно фиг.5 для регулировки установки схематично показанной на фиг.5 прокатной клети 20.
Настоящее изобретение имеет много преимуществ. В частности, в каждой рабочей точке блока 1 гидравлического цилиндра осуществляется оптимальный режим работы регулирующего устройства 11. Регулирование полностью линеаризовано. Преобразования (сравните нелинейный HGC) не требуются. Кроме того, - также в противоположность нелинейному HGC - простым способом возможно встраивание заявленного изобретения в уже имеющиеся системы регулирования, так как уже имеющиеся дополняющие регулировочные структуры (сетевые регулировки и т.п.) не требуется изменять. Тем самым получается упрощенный пуск в эксплуатацию и возможность технического обслуживания регулирующего устройства 11 согласно настоящему изобретению.
Приведенное выше описание служит исключительно пояснению заявленного изобретения. Объем защиты заявленного изобретения должен, напротив, определяться исключительно приложенной формулой изобретения.
Регулирующее устройство (11) для регулирования положения блока (1) гидравлического цилиндра содержит регулятор (15), который со стороны входа воспринимает номинальное положение (s*) поршня (3) блока (1) гидравлического цилиндра и фактическое положение (s) поршня (3) и на основе разности (δs) между номинальным положением (s*) и фактическим положением (s) определяет предварительное регулирующее воздействие (u') для блока (7) управления клапаном блока (1) гидравлического цилиндра. За регулятором (15) расположен блок (17) линеаризации, который предварительное регулирующее воздействие (u') умножает на коэффициент (F) линеаризации и выдает предварительное регулирующее воздействие (u'), умноженное на коэффициент (F) линеаризации, в качестве окончательного регулирующего воздействия (u) на блок (7) управления клапаном, так что поршень (3) перемещается со скоростью (v) регулирующего воздействия. Блок (17) линеаризации определяет коэффициент (F) линеаризации динамически как функцию (s) фактического положения поршня (3), а также рабочих давлений (рА, рВ, рР, рТ), имеющих место по обе стороны от поршня (3), а также со стороны притока и оттока блока (7) управления клапаном. Определение осуществляется таким образом, что отношение скорости (v) регулирующего воздействия к разности (δs) номинального положения (s*) и фактического положения (s) является независимым от фактического положения (s) поршня (3) и рабочих давлений (рА, рВ, рР, рТ). В специальном случае, когда регулятор (15) выполнен как пропорциональный (Р) регулятор, последовательность регулятора (15) и блока (17) линеаризации может быть заменена на обратную. 4 н. и 7 з.п. ф-лы, 5 ил.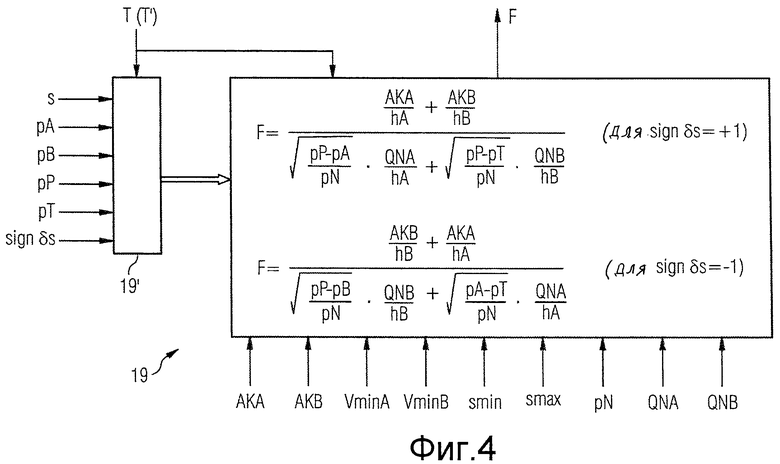
1. Регулирующее устройство для регулирования положения блока (1) гидравлического цилиндра,
причем регулирующее устройство содержит регулятор (15), который со стороны входа воспринимает номинальное положение (s*) поршня (3) блока (1) гидравлического цилиндра и фактическое положение (s) поршня, на основе разности (δs) между номинальным положением (s*) и фактическим положением (s) определяет предварительное регулирующее воздействие (u') для блока (7) управления клапаном блока (1) гидравлического цилиндра,
причем за регулятором (15) расположен блок (17) линеаризации, который предварительное регулирующее воздействие (u') умножает на коэффициент (F) линеаризации и выдает предварительное регулирующее воздействие (u'), умноженное на коэффициент (F) линеаризации, в качестве окончательного регулирующего воздействия (u) на блок (7) управления клапаном, так что поршень (3) перемещается со скоростью (v) регулирующего воздействия,
причем блок (17) линеаризации определяет коэффициент (F) линеаризации динамически как функцию фактического положения (s) поршня (3) и рабочих давлений (рА, рВ, рР, рТ), имеющих место по обе стороны от поршня (3), а также со стороны притока и оттока блока (7) управления клапаном,
причем блок (17) линеаризации определяет коэффициент (F) линеаризации таким образом, что отношение скорости (v) регулирующего воздействия к разности (δs) номинального положения (s*) и фактического положения (s) является не зависимым от фактического положения (s) поршня (3) и рабочих давлений (рА, рВ, рР, рТ).
2. Регулирующее устройство по п.1, отличающееся тем, что регулятор (15) выполнен в виде Р-регулятора (пропорционального регулятора).
3. Регулирующее устройство для регулирования положения блока (1) гидравлического цилиндра,
причем регулирующее устройство содержит регулятор (15), который выполнен в виде Р-регулятора, который воспринимает на стороне входа регулируемую величину (δs'), определяет на основе регулируемой величины (δs') регулирующее воздействие (u) для блока (7) управления клапаном блока (1) гидравлического цилиндра и выдает регулирующее воздействие (u) на блок (7) управления клапаном, так что поршень (3) перемещается со скоростью (v) регулирующего воздействия,
причем перед регулятором (15) расположен блок (17) линеаризации, который воспринимает номинальное положение (s*) поршня (3) блока (1) гидравлического цилиндра и фактическое положение (s) поршня (3), разность (δs) которых умножает на коэффициент (F) линеаризации, и выдает разность (δs), умноженную на коэффициент (F) линеаризации, в качестве регулируемой величины (δs') на регулятор (15),
причем блок (17) линеаризации определяет коэффициент (F) линеаризации динамически как функцию фактического положения (s) поршня (3), а также рабочих давлений (рА, рВ, рР, рТ), имеющих место по обе стороны от поршня (3), а также со стороны притока и оттока блока (7) управления клапаном,
причем блок (17) линеаризации определяет коэффициент (F) линеаризации таким образом, что отношение скорости (v) регулирующего воздействия к разности (δs) номинального положения (s*) и фактического положения (s) поршня (3) является не зависимым от фактического положения (s) поршня (3) и рабочих давлений (рА, рВ, рР, рТ).
4. Регулирующее устройство по любому из пп.1-3, отличающееся тем, что блок (17) линеаризации для определения коэффициента (F) линеаризации применяет в качестве дополнительных данных данные производительности (pN, QNA, QNB) блока (7) управления клапаном, эффективные рабочие поверхности (АKА, АKВ) по обе стороны от поршня (3) и минимально возможные эффективные объемы (VminA, VminB) no обе стороны от поршня (3).
5. Регулирующее устройство по п.4, отличающееся тем, что блок (17) линеаризации воспринимает дополнительные данные, по меньшей мере частично, как параметры.
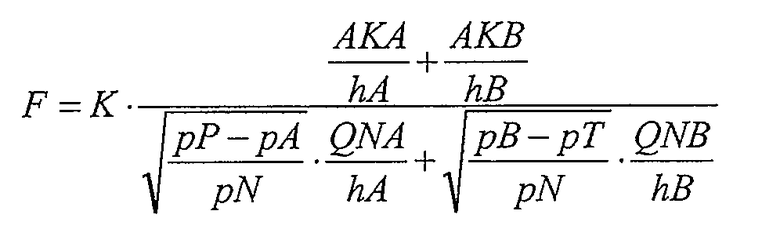
6. Регулирующее устройство по п.4, отличающееся тем, что блок (17) линеаризации определяет коэффициент (F) линеаризации согласно соотношению
причем
F - коэффициент линеаризации,
K - свободно выбираемый постоянный масштабный коэффициент,
АKА - рабочая поверхность поршня (3), обращенная к увеличивающемуся рабочему объему (5А),
АKВ - рабочая поверхность поршня (3), обращенная к уменьшающемуся рабочему объему (5В),
рА - рабочее давление, которое действует на рабочую поверхность (4А) поршня (3), обращенную к увеличивающемуся рабочему объему (5А),
рВ - рабочее давление, которое действует на рабочую поверхность (4В) поршня (3), обращенную к уменьшающемуся рабочему объему (5В),
рР - рабочее давление со стороны притока блока (7) управления клапаном,
рТ - рабочее давление со стороны оттока блока (7) управления клапаном,
pN - номинальное давление блока (7) управления клапаном,
QNA - номинальный объемный поток, который втекает в увеличивающийся рабочий объем (5А), когда разность между рабочим давлением (рР) со стороны притока блока (7) управления клапаном и рабочим давлением (рА) в увеличивающемся рабочем объеме (5А) равна номинальному давлению (pN),
QNB - номинальный объемный поток, который вытекает из уменьшающегося рабочего объема (5В), когда разность между рабочим давлением (рВ) в уменьшающемся рабочем объеме (5В) и рабочим давлением (рТ) со стороны оттока блока (7) управления клапаном равна номинальному давлению (pN),
hA - отношение между увеличивающимся рабочим объемом (5А) и обращенной к этому рабочему объему (5А) рабочей поверхностью (4А), причем увеличивающийся рабочий объем (5А) определяется на основе фактического положения (s) поршня (3) и минимально возможного для этой стороны поршня эффективного объема (VminA), и
hB - отношение между уменьшающимся рабочим объемом (5В) и обращенной к уменьшающемуся рабочему объему (5В) рабочей поверхностью (4В), причем уменьшающийся рабочий объем (5В) определяется на основе фактического положения (s) поршня (3) и минимально возможного для этой стороны поршня эффективного объема (VminB).
7. Регулирующее устройство по п.5, отличающееся тем, что блок (17) линеаризации определяет коэффициент (F) линеаризации согласно соотношению
причем
F - коэффициент линеаризации,
K - свободно выбираемый постоянный масштабный коэффициент,
АKА - рабочая поверхность поршня (3), обращенная к увеличивающемуся рабочему объему (5А),
АKВ - рабочая поверхность поршня (3), обращенная к уменьшающемуся рабочему объему (5В),
рА - рабочее давление, которое действует на рабочую поверхность (4А) поршня (3), обращенную к увеличивающемуся рабочему объему (5А),
рВ - рабочее давление, которое действует на рабочую поверхность (4В) поршня (3), обращенную к уменьшающемуся рабочему объему (5В),
рР - рабочее давление со стороны притока блока (7) управления клапаном,
рТ - рабочее давление со стороны оттока блока (7) управления клапаном,
pN - номинальное давление блока (7) управления клапаном,
QNA - номинальный объемный поток, который втекает в увеличивающийся рабочий объем (5А), когда разность между рабочим давлением (рР) со стороны притока блока (7) управления клапаном и рабочим давлением (рА) в увеличивающемся рабочем объеме (5А) равна номинальному давлению (pN),
QNB - номинальный объемный поток, который вытекает из уменьшающегося рабочего объема (5В), когда разность между рабочим давлением (рВ) в уменьшающемся рабочем объеме (5В) и рабочим давлением (рТ) со стороны оттока блока (7) управления клапаном равна номинальному давлению (pN),
hA - отношение между увеличивающимся рабочим объемом (5А) и обращенной к этому рабочему объему (5А) рабочей поверхностью (4А), причем увеличивающийся рабочий объем (5А) определяется на основе фактического положения (s) поршня (3) и минимально возможного для этой стороны поршня эффективного объема (VminA), и
hB - отношение между уменьшающимся рабочим объемом (5В) и обращенной к уменьшающемуся рабочему объему (5В) рабочей поверхностью (4В), причем уменьшающийся рабочий объем (5В) определяется на основе фактического положения (s) поршня (3) и минимально возможного для этой стороны поршня эффективного объема (VminB).
8. Регулирующее устройство по любому из пп.1-3, 5-7, отличающееся тем, что оно выполнено как программируемое программным обеспечением регулирующее устройство, которое программируется модулем (12) программного обеспечения, так что оно на основе программирования модулем (12) программного обеспечения выполнено согласно любому из предыдущих пунктов.
9. Регулирующее устройство по п.4, отличающееся тем, что оно выполнено как программируемое программным обеспечением регулирующее устройство, которое программируется модулем (12) программного обеспечения, так что оно на основе программирования модулем (12) программного обеспечения выполнено согласно любому из предыдущих пунктов.
10. Носитель данных, на котором сохранен в машиночитаемой форме модуль (12) программного обеспечения, который содержит машинный код (14), обработка которого связанным с блоком (1) гидравлического цилиндра регулирующим устройством (11), программируемым программным обеспечением, вызывает то, что регулирующее устройство (11) выполняется согласно любому из пп.1-7.
11. Применение блока (1) гидравлического цилиндра, регулируемого посредством регулирующего устройства (11) по любому из пп.1-9, для регулирования установки прокатной клети (20).
| ЕР 0557541 А, 01.09.1993 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД | 1992 |
|
RU2072544C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

