[Область техники]
[0001]
Настоящее изобретение относится к способу управления вождением и оборудованию управления вождением.
[Уровень техники]
[0002]
В отношении этого типа оборудования известна технология, использующая многомасштабное распознавание. Эта методика включает в себя вычисление набора полос движения транспортного средства и препятствия, оценку риска в каждой полосе движения на основе существующих вероятностей транспортного средства и препятствия в точке пересечения их маршрутов и выбор действия вождения (Патентный документ 1: JP2011-96105A).
[Документ предшествующего уровня техники]
[Патентный Документ]
[0003]
[Патентный Документ 1] JP2011-96105A
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
Однако в вышеприведенном предшествующем уровне техники ряд полос движения транспортного средства и препятствие создаются, когда полосы движения делятся посредством многомасштабного распознавания; поэтому число обрабатываемых объектов будет значительно большим, и может быть трудно определить действие вождения в реальном времени. Когда условия обнаружения для транспортного средства и препятствия являются однородными, нагрузка обработки постоянно высока, и, таким образом, возникает проблема в том, что определение в реальном времени становится более трудным.
[0005]
Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы установить условие обнаружения в соответствии с действием вождения в каждом из событий, с которым транспортное средство, движущееся по маршруту, встречается последовательно.
[Средство для решения проблем]
[0006]
Настоящее изобретение предоставляет схему, которая включает в себя извлечение событий, с которыми сталкивается транспортное средство, на основе информации обнаружения, полученной в соответствии с условием обнаружения, и создание плана вождения, в котором действие вождения определяется для каждого из извлеченных событий. В этой схеме вышеупомянутая проблема решается путем определения условия обнаружения на основе содержания действия вождения в событиях.
[Эффект изобретения]
[0007]
Согласно настоящему изобретению, содержание и объем информации обнаружения управляются в соответствии с действием вождения, и, следовательно, точный план вождения, основанный на определении в реальном времени, может быть создан путем получения необходимой информации даже при снижении нагрузки обработки.
[Краткое описание чертежей]
[0008]
Фиг. 1 - блок-схема системы управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 2А - схема для описания примера плана вождения.
Фиг. 2B - схема, иллюстрирующая пример отображения плана вождения.
Фиг.3 - блок-схема последовательности операций, иллюстрирующая процедуру управления, выполняемую системой управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения.
Фиг. 4 - схема для описания способа задания условия обнаружения.
Фиг. 5 - блок-схема, иллюстрирующая подпрограмму, связанную с этапом S15 процедуры управления, показанной на фиг. 3.
Фиг. 6А - первая схема для описания первого примера способа определения условия обнаружения.
Фиг. 6B - вторая схема для описания первого примера способа определения условия обнаружения.
Фиг. 7А - первая схема для описания второго примера способа определения условия обнаружения.
Фиг. 7B - вторая схема для описания второго примера способа определения условия обнаружения.
Фиг. 8А - первая схема для описания третьего примера способа определения условия обнаружения.
Фиг. 8B - вторая схема для описания третьего примера способа определения условия обнаружения.
Фиг. 9А - первая схема для описания четвертого примера способа определения условия обнаружения.
Фиг. 9B - вторая схема для описания четвертого примера способа определения условия обнаружения.
Фиг. 10А - первая схема для описания пятого примера способа определения условия обнаружения.
Фиг. 10B - вторая схема для описания пятого примера способа определения условия обнаружения.
Фиг. 11А - первая схема для описания первого примера процесса создания плана вождения.
Фиг. 11B - вторая схема для описания первого примера процесса создания плана вождения.
Фиг. 12А - первая схема для описания второго примера процесса создания плана вождения.
Фиг. 12B - вторая схема для описания второго примера процесса создания плана вождения.
Фиг. 13 - блок-схема, иллюстрирующая подпрограмму этапа S16 процедуры управления, показанной на фиг. 3.
[Вариант(ы) осуществления изобретения]
[0009]
Далее один или несколько вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В вариантах осуществления настоящее изобретение будет описано посредством примерного случая, в котором способ управления вождением и оборудование управления вождением в соответствии с настоящим изобретением применяются к системе управления вождением, которая отвечает за взаимодействие с бортовым оборудованием 200, оснащенным в транспортном средстве.
[0010]
На фиг.1 показана схема, иллюстрирующая блочную конфигурацию системы 1 управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Система 1 управления вождением включает в себя оборудование 100 управления вождением и бортовое оборудование 200. В настоящем изобретении форма воплощения оборудования 100 управления вождением не ограничена. Оборудование 100 управления вождением может быть оснащено в транспортном средстве или также может быть применено к портативному терминальному устройству, которое может обмениваться информацией с бортовым оборудованием 200. Примеры терминального устройства включают в себя оборудование, такое как смартфон или КПК. Каждое из системы 1 управления вождением, оборудования 100 управления вождением, бортового оборудования 200 и различных предусмотренных в нем модулей может представлять собой компьютер, который включает в себя модуль арифметической обработки, такой как один или несколько CPU, и выполняет вычислительные процессы.
[0011]
Бортовое оборудование 200 будет описано первым.
Бортовое оборудование 200 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения, устройство 240 удержания на полосе движения и устройство 250 вывода. Эти устройства, которые составляют бортовое оборудование 200, соединены друг с другом через локальную сеть контроллера (CAN) или другую бортовую локальную сеть (LAN) для взаимного обмена информацией. Бортовое оборудование 200 может обмениваться информацией с оборудованием 100 управления вождением через такую бортовую локальную сеть.
[0012]
Контроллер 210 транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения управляет вождением транспортного средства в соответствии с планом вождения, созданным процессором 11. Контроллер 210 транспортного средства управляет датчиками 260, устройством 270 привода и устройством 280 рулевого управления. Контроллер 210 транспортного средства принимает информацию о транспортном средстве от датчиков 260. Датчики 260 включают в себя датчик 261 угла поворота рулевого колеса, датчик 262 скорости транспортного средства и датчик 263 пространственного положения. Датчик 261 угла поворота рулевого колеса обнаруживает информацию, такую как величина рулевого управления, скорость рулевого управления и ускорение рулевого управления, и выводит информацию в контроллер 210 транспортного средства. Датчик 262 скорости транспортного средства обнаруживает скорость и/или ускорение транспортного средства и выводит результат обнаружения на контроллер 210 транспортного средства. Датчик 263 пространственного положения определяет положение транспортного средства, угол наклона транспортного средства, угол поворота транспортного средства и угол крена транспортного средства и выводит их на контроллер 210 транспортного средства. Датчик 263 пространственного положения включает в себя гиродатчик.
[0013]
Контроллер 210 транспортного средства в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой бортовой компьютер, такой как электрический блок управления (ECU), и электронным образом управляет вождением/работой транспортного средства. Транспортным средством может быть, например, электромобиль, имеющий электромотор в качестве источника приведения в движение, автомобиль с двигателем, имеющий двигатель внутреннего сгорания в качестве источника приведения в движение, или гибридный автомобиль, имеющий как электромотор, так и двигатель внутреннего сгорания в качестве источников приведения в движение. Примеры электромобиля и гибридного автомобиля, имеющего электромотор в качестве источника приведения в движение, включают в себя тип, в котором источником питания для электромотора является вторичная батарея, и тип, в котором источником питания для электромотора является топливный элемент.
[0014]
Устройство 270 привода в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя приводной механизм транспортного средства. Приводной механизм включает в себя электромотор и/или двигатель внутреннего сгорания в качестве вышеописанных источников приведения в движение, устройство передачи мощности, включающее в себя ведущий вал, и автоматическую коробку передач, которые передают выходную мощность источника или источников приведения в движение на приводные колеса и тормозное устройство 271, которое тормозит колеса. Устройство 270 привода генерирует соответствующие управляющие сигналы для этих компонентов приводного механизма и выполняет управление вождением, включая ускорение и замедление транспортного средства. Эти управляющие сигналы для приводного механизма генерируются на основе входных сигналов от работы акселератора и работы тормоза и сигналов управления, полученных от контроллера 210 транспортного средства или от оборудования 100 управления вождением. Управляющая информация отправляется на устройство 270 привода, которое может, таким образом, выполнять управление вождением, включая ускорение и замедление транспортного средства, автономным способом (понятие «автономный режим» включает в себя понятие «автоматизированный режим», то есть понятие «автономное вождение (или движение)» охватывает понятие «автоматизированное вождение (или движение)»). В случае гибридного автомобиля устройство 270 привода может принимать отношение выходного крутящего момента к электромотору и выходного крутящего момента к двигателю внутреннего сгорания в соответствии с состоянием движения транспортного средства.
[0015]
Устройство 280 рулевого управления в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя рулевой исполнительный механизм (актуатор). Рулевой исполнительный механизм включает в себя мотор и другие необходимые компоненты, прикрепленные к валу рулевой колонки. Устройство 280 рулевого управления выполняет управление изменением направления движения транспортного средства на основе управляющего сигнала, полученного от контроллера 210 транспортного средства, или входного сигнала посредством операции рулевого управления. Контроллер 210 транспортного средства отправляет управляющую информацию, включая величину рулевого управления, в устройство 280 рулевого управления, чтобы таким образом выполнять управление изменением направления движения. Управление устройством 270 привода и/или управление устройством 280 рулевого управления может выполняться полностью автономным способом или в форме помощи водителю в операции вождения (операции движения). Управление устройством 270 привода и управление устройством 280 рулевого управления могут быть приостановлены/отменены из-за вмешательства водителя.
[0016]
Бортовое оборудование 200 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя навигационное устройство 220. Навигационное устройство 220 рассчитывает маршрут от текущего положения транспортного средства до пункта назначения, используя известную схему на момент подачи настоящей заявки. Вычисленный маршрут отправляется в контроллер 210 транспортного средства для использования для управления вождением транспортного средства. Вычисленный маршрут выводится в качестве информации о направлении по маршруту через устройство 250 вывода, которое будет описано позже. Навигационное устройство 220 включает в себя устройство 221 обнаружения положения. Устройство 221 обнаружения положения включает в себя приемник для Глобальной системы позиционирования (GPS) и обнаруживает положение движения (широту и долготу) для движения транспортного средства.
[0017]
Навигационное устройство 220 обладает доступной картографической информацией 222, дорожной информацией 223 и информацией 224 о правилах дорожного движения. Достаточно того, что картографическая информация 222, дорожная информация 223 и информация 224 о правилах дорожного движения могут считываться навигационным устройством 220, и они могут предоставляться как информационные элементы, которые физически отделены от навигационного устройства 220 или также могут храниться в сервер, который доступен для чтения через устройство 30 связи (или устройство связи, предусмотренное в бортовом оборудовании 200). Картографическая информация 222 является так называемой электронной картой, которая представляет информацию, в которой широта и долгота связаны с картографической информацией. Картографическая информация 222 имеет дорожную информацию 223, которая связана с каждой точкой.
[0018]
Дорожная информация 223 определяется узлами и связями, соединяющими между узлами. Дорожная информация 223 включает в себя информацию, которая определяет дорогу по положению/региону дороги, типу дороги, ширине дороги и информацию о форме дороги. Дорожная информация 223 сохраняется таким образом, что идентификационная информация каждой дорожной линии связи связана с положением перекрестка, направлением въезда на перекресток, типом перекрестка и другой информацией, касающейся перекрестка. Пересечения включают точки слияния и точки ветвления. Дорожная информация 223 также хранится таким образом, что идентификационная информация каждой дорожной линии связи связана с типом дороги, шириной дороги, формой дороги, разрешено или нет прямолинейное движение, приоритетное отношение при движении, разрешен ли обгон (разрешено ли изменение полосы движения на смежную полосу движения) и другую информацию о дороге.
[0019]
Навигационное устройство 220 задает первый маршрут, по которому движется транспортное средство, на основе текущего положения транспортного средства, обнаруженного устройством 221 обнаружения положения. Первый маршрут может быть маршрутом к пункту назначения, который обозначен пользователем, или также может быть маршрутом к пункту назначения, который оценивается на основе истории путешествий транспортного средства/пользователя. Первый маршрут, по которому движется транспортное средство, может быть указан для каждой дороги, указан для каждой линии, на которой указано направление въезда/выезда, и/или указан для каждой полосы, по которой транспортное средство фактически движется. Навигационное устройство 220 обращается к дорожной информации 223, которая будет описана позже, чтобы указать первый маршрут, по которому движется транспортное средство. Первый маршрут может быть указан с использованием одной или нескольких линий связи и одной или нескольких полос движения.
[0020]
Первый маршрут включает в себя конкретную информацию (информацию о координатах) одной или нескольких точек, через которые транспортное средство будет проезжать в будущем. Первый маршрут включает в себя по меньшей мере точку, которая указывает положение движения, в котором транспортное средство будет находиться в будущем. Первый маршрут может состоять из непрерывной линии или также может состоять из отдельных точек. Хотя это и не ограничено особо, первый маршрут определяется идентификатором дороги, идентификатором полосы движения, идентификатором узла и/или идентификатором линии связи. Эти идентификатор дороги, идентификатор полосы движения, идентификатор узла и идентификатор линии связи определены в картографической информации 222 и/или в дорожной информации 223.
[0021]
Информация 224 о правилах дорожного движения представляет правила дорожного движения на маршруте, такие как СТОП, НЕТ ПАРКОВКИ, НЕТ ОСТАНОВКИ, МЕДЛЕННО (УСТУПИ ДОРОГУ или ДАЙТЕ ПУТЬ) и ОГРАНИЧЕНИЕ СКОРОСТИ, которым транспортное средство должно следовать во время движения. Каждое правило определяется для каждой точки (широта и долгота) и каждой линии связи. Информация 224 о правилах дорожного движения может включать в себя информацию о светофорах, полученную от оборудования, предусмотренного на стороне дороги.
[0022]
Бортовое оборудование 200 включает в себя устройство 230 обнаружения. Устройство 230 обнаружения получает информацию обнаружения вокруг транспортного средства, которое движется по маршруту. Устройство 230 обнаружения транспортного средства обнаруживает наличие и существующие положения объектов, включая препятствия, которые существуют вокруг транспортного средства. Хотя это не ограничено особым образом, устройство 230 обнаружения включает в себя камеру 231. Камера 231 является, например, устройством формирования изображения, включающим в себя элемент формирования изображения, такой как ПЗС. Камера 231 также может быть инфракрасной камерой или стереокамерой. Камера 231 расположена в определенном положении транспортного средства и захватывает изображения объектов вокруг транспортного средства. Используемый здесь термин «вокруг транспортного средства» охватывает понятия «впереди транспортного средства», «позади транспортного средства», «вбок впереди транспортного средства» и «вбок позади транспортного средства». Объекты включают в себя двумерные знаки, такие как стоп-линии, нарисованные на поверхности дороги. Объекты включают в себя трехмерные физические объекты. Объекты включают в себя стационарные объекты, такие как дорожные знаки. Объекты включают в себя движущиеся объекты, такие как пешеходы, двухколесные транспортные средства и четырехколесные транспортные средства (другие транспортные средства). Объекты включают в себя дорожные конструкции, такие как ограждения, разделительные полосы и бордюрные камни.
[0023]
В дополнение или альтернативно, устройство 230 обнаружения может анализировать данные изображения и идентифицировать тип объекта на основе результата анализа. Устройство 230 обнаружения использует метод сопоставления с образцом или тому подобное, чтобы идентифицировать, является ли объект, включенный в данные изображения, транспортным средством, пешеходом или дорожным знаком. Устройство 230 обнаружения обрабатывает полученные данные изображения, чтобы получить расстояние от транспортного средства до объекта, существующего вокруг транспортного средства, на основе положения объекта. Устройство 230 обнаружения получает время, необходимое для того, чтобы транспортное средство достигло объекта, на основе положения объекта, существующего вокруг транспортного средства, и времени.
[0024]
В дополнение или в качестве альтернативы, устройство 230 обнаружения может использовать радарное устройство 232. Примеры радарного устройства 232 для использования включают в себя такие, как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер, схемы которых известны на момент подачи настоящей заявки. Устройство 230 обнаружения обнаруживает наличие или отсутствие объектов, положения объектов и расстояния до объектов на основе принятых сигналов от радарного устройства 232. Устройство 230 обнаружения может обнаруживать наличие или отсутствие объектов, положения объектов и расстояния до объектов на основе результатов кластеризации информации облака точек, которую получает радарное устройство.
[0025]
Устройство 230 обнаружения может получать информацию обнаружения от внешних устройств через устройство 233 связи. Когда устройство 233 связи способно осуществлять связь между транспортными средствами между транспортным средством и другим транспортным средством, устройство 230 обнаружения может получать скорость транспортного средства и ускорение другого транспортного средства, которые обнаруживаются датчиком скорости транспортного средства другого транспортного средства, как информацию об объекте, которая представляет существование другого транспортного средства. Как будет понятно, устройство 230 обнаружения также может получать информацию об объекте, которая включает в себя положение, скорость и ускорение другого транспортного средства, от внешних устройств интеллектуальных транспортных систем (ITS). Устройство 230 обнаружения может получать информацию об окружающей среде транспортного средства на стороне бортового оборудования 200 и может получать информацию об области, находящейся дальше от транспортного средства, чем предварительно определенное расстояние, от внешних устройств, обеспеченных на стороне дороги, через устройство 233 связи.
[0026]
Устройство 230 обнаружения последовательно выводит результаты обнаружения в процессор 11.
[0027]
Получение описанной выше информации обнаружения, то есть процесс обнаружения, выполняется на основе заранее определенного условия обнаружения. Условие обнаружения - это условие, которое можно задать для каждой точки. Процессор 11 вычисляет условие обнаружения и дает команду устройству 230 обнаружения задать условие обнаружения.
Устройство 230 обнаружения может задать условие обнаружения для каждой точки. Точка может быть точкой (позиционной информацией), определенной в событии, или также может быть любой точкой на первом маршруте. Процессор 11 включает в себя информацию о точке в условии обнаружения, которая должна быть задана.
[0028]
Бортовое оборудование 200 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения включает в себя устройство 240 удержания на полосе движения. Устройство 240 удержания на полосе движения включает в себя камеру 241 и дорожную информацию 242. Камера 231 устройства обнаружения может использоваться как камера 241. Дорожная информация 223 навигационного устройства может совместно использоваться как дорожная информация 242. Устройство 240 удержания на полосе движения обнаруживает полосу, в которой движется транспортное средство, по первому маршруту из изображений, захваченных камерой 241. Устройство 240 удержания на полосе движения имеет функцию предотвращения выезда с полосы движения (функцию поддержки удержания на полосе движения) для управления перемещением транспортного средства, чтобы поддерживать определенную взаимосвязь между положением маркера полосы движения и положением транспортного средства. Оборудование 100 управления вождением управляет перемещением транспортного средства, так что транспортное средство движется вдоль центра полосы движения. Маркер полосы движения не ограничен при условии, что он имеет функцию определения полосы движения. Маркер полосы движения может быть линией, проведенной на поверхности дороги, посадкой, существующей между полосами движения, или структурой дороги, существующей на стороне обочины дороги, такой как ограждение, бордюрный камень, тротуар и эксклюзивная дорога для двухколесных средств. Маркер полосы движения также может быть фиксированным физическим объектом, который существует на стороне обочины полосы движения, таким как рекламный дисплей, дорожный знак, магазин и придорожное дерево.
[0029]
Процессор 11, который будет описан позже, сохраняет объект, обнаруженный устройством 230 обнаружения, так что обнаруженный объект связан с событием и/или маршрутом. Процессор 11 хранит объект, существующий на заранее определенном расстоянии от события и имеющий возможность встречи в событии, так что объект связан с событием. Процессор 11 сохраняет объект, обнаруженный в событии, так что объект связан с маршрутом. Процессор 11 определяет, по какому маршруту и в каком положении находится объект. Это позволяет быстро определить объект, с которым транспортное средство сталкивается в событии. Один объект может быть связан с событием, или два или более объектов также могут быть связаны с событием. Объекты, для которых определено, что транспортное средство встречает объекты в событии, указанном как место, связаны с общим событием. Например, когда два или более пешеходов присутствуют на пешеходном переходе, определенном как событие, каждый пешеход ассоциируется с событием пешеходного перехода. Каждый пешеход может быть связан как независимый объект или также может быть связан как один из набора объектов, имеющих общее положение и скорость (в пределах предварительно определенного диапазона значений).
[0030]
Бортовое оборудование 200 включает в себя устройство 250 вывода. Устройство 250 вывода включает в себя дисплей 251 и динамик 252. Устройство 250 вывода выводит различные информационные элементы, касающиеся управления вождением, пользователю или пассажирам окружающих транспортных средств. Устройство 250 вывода выводит созданный план действий вождения и информацию, касающуюся управления вождением, на основе плана действий вождения. Устройство 250 вывода предварительно сообщает пассажирам транспортного средства, что операция рулевого управления и/или ускорение или замедление будут выполняться, через дисплей 251 и/или динамик 252, в качестве информации в соответствии с управляющей информацией для движения транспортного средства по первому маршруту (целевой маршрут). В дополнение или в качестве альтернативы, пассажиры транспортного средства или пассажиры других транспортных средств могут быть предварительно проинформированы о таких элементах информации, касающихся управления вождением с помощью наружных ламп и/или внутренних ламп. В дополнение или в качестве альтернативы, устройство 250 вывода может выводить различные информационные элементы, касающиеся управления вождением, на внешние устройства интеллектуальных транспортных систем или тому подобное через устройство связи.
[0031]
Далее будет описано оборудование 100 управления вождением.
Оборудование 100 управления вождением включает в себя устройство 10 управления, устройство 20 вывода и устройство 30 связи. Устройство 20 вывода работает так же, как ранее описанное устройство 250 вывода бортового оборудования 200. Дисплей 251 и динамик 252 могут использоваться в качестве компонентов устройства 20 вывода. Устройство 10 управления и устройство 20 вывода могут обмениваться информацией друг с другом по проводной или беспроводной линии связи. Устройство 30 связи выполняет обмен информацией с бортовым оборудованием 200, обмен информацией внутри оборудования 100 управления вождением и обмен информацией между внешними устройствами и системой 1 управления вождением.
[0032]
Сначала будет описано устройство 10 управления.
Устройство управления 10 включает в себя процессор 11. Процессор 11 является вычислительным устройством, которое выполняет процесс управления вождением, включающий в себя создание плана вождения транспортного средства. В частности, процессор 11 представляет собой компьютер, включающий в себя постоянное запоминающее устройство (ROM), в котором хранятся программы для выполнения процесса управления вождением, включая создание плана вождения, центральный процессор (CPU) в качестве рабочей схемы, которая выполняет программы, хранящиеся в ROM, чтобы служить в качестве устройства 10 управления и оперативное запоминающее устройство (RAM), которое служит в качестве доступного запоминающего устройства.
[0033]
Процессор 11 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения выполняет следующие процессы, относящиеся к способу:
(1) процесс получения информации обнаружения вокруг транспортного средства;
(2) процесс извлечения событий, с которыми сталкивается транспортное средство, на основе информации обнаружения;
(3) процесс размещения извлеченных событий в порядке встреч с транспортным средством;
(4) процесс определения действия вождения на основе информации обнаружения, полученной в событиях;
(5) процесс создания плана последовательного вождения, в котором действие вождения определяется для каждого из событий; и
(6) процесс управления транспортным средством для выполнения инструкции управления вождением в соответствии с планом вождения. Процессор 11 дополнительно выполняет
(7) процесс определения на основе содержания действия вождения, определенного для первого события, с которым транспортное средство сталкивается ранее, второго условия обнаружения, касающегося одного или нескольких вторых событий (по меньшей мере, одного второго события), с которыми транспортное средство сталкивается после первого события.
[0034]
Процессор 11 имеет первый блок, который реализует функцию создания/повторного создания плана вождения, второй блок, который реализует функцию выполнения плана вождения, и третий блок, который реализует функцию задания условия обнаружения в соответствии с содержанием действия вождения выполняемого плана вождения и изменением содержания. Процессор 11 выполняет каждую из вышеупомянутых функций посредством взаимодействия программного обеспечения для реализации каждой функции или выполнения каждого процесса и вышеописанного аппаратного обеспечения.
[0035]
Сначала со ссылкой на фиг. 2A будет описан процесс создания плана вождения, выполняемый процессором 11 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения. Процесс создания плана движения является базовым процессом, выполняемым системой 1 управления вождением. Процесс создания плана вождения включает в себя процесс вычисления первого маршрута, по которому движется транспортное средство, процесс извлечения событий, с которыми транспортное средство сталкивается при движении по первому маршруту, процесс определения действий вождения в событиях и процесс создания плана вождения, в котором действие вождения связано с каждым событием.
[0036]
Сначала будет описан процесс вычисления первого маршрута.
Процессор 11 вычисляет маршрут, по которому транспортное средство движется или планирует двигаться (этот маршрут также может называться «первым маршрутом»). Чтобы вычислить первый маршрут, процессор 11 получает информацию о рассматриваемом транспортном средстве. Процессор 11 получает текущее положение транспортного средства от устройства 221 обнаружения положения. Процессор 11 обращается к картографической информации 222, чтобы вычислить первый маршрут, используя полученное текущее положение и направление движения. В дополнение или в качестве альтернативы, процессор 11 может получить запланированный маршрут движения транспортного средства, который получен навигационным устройством 220, в качестве первого маршрута. В дополнение или в качестве альтернативы, процессор 11 может получить маршрут наведения от текущего положения к пункту назначения, который получен навигационным устройством 220, в качестве первого маршрута. В процессе вычисления маршрута транспортного средства в зависимости от ситуации может использоваться схема, известная на момент подачи настоящей заявки.
[0037]
Процесс извлечения событий будет описан.
Процессор 11 получает (обнаруживает/извлекает) события, с которыми сталкивается транспортное средство, движущееся по первому маршруту. События в одном или нескольких вариантах осуществления настоящего изобретения относятся к вещам (наличие веществ/физических объектов), которые запускают процесс определения в управлении вождением. Управление вождением, которое должно быть выполнено, включает в себя ускорение и замедление транспортного средства и рулевое управление транспортным средством. Другими словами, события - это те, которые заставляют транспортное средство ускоряться или замедляться и поворачивать. События могут быть представлены пересечением на первом маршруте, стоп-линией на первом маршруте, пешеходным переходом на первом маршруте и объектом вокруг транспортного средства, движущегося по первому маршруту. Объекты включают двумерные/трехмерные дорожные знаки, движущиеся объекты, такие как пешеходы, двухколесные транспортные средства и четырехколесные транспортные средства, и дорожные конструкции, такие как ограждения, срединные полосы и бордюрные камни. Процессор 11 указывает положения событий.
[0038]
Процессор 11 обращается к картографической информации 222 для извлечения другого маршрута, имеющего точку пересечения с первым маршрутом, по которому транспортное средство движется или планирует двигаться. Примеры такого маршрута, имеющего точку пересечения с первым маршрутом, включают в себя маршрут, который пересекается с первым маршрутом, маршрут, который объединяется с первым маршрутом, маршрут, который ответвляется от первого маршрута, и другие формы пересечения с первым маршрут. Когда обнаружен другой маршрут, точка пересечения с другим маршрутом является пересечением с первым маршрутом, которое получено как событие. Процессор 11 обращается к информации 224 о правилах дорожного движения, чтобы определить наличие и положение дорожных знаков на первом маршруте. Информация 224 о правилах дорожного движения является информацией, в которой информация, такая как положение остановки, запрет на въезд и одностороннее движение, связана со линиями связи (маршрутами) и/или позиционной информацией. Процессор 11 распознает правило дорожного движения, заставляющее остановиться, как событие. Процессор 11 извлекает положение, в котором определено правило, заставляющее остановиться, как положение, в котором транспортное средство встречает событие. Извлеченное положение события связано с маршрутом (включая линию связи). Точно так же процессор 11 распознает правило дорожного движения запрета на въезд как событие. Процессор 11 извлекает еще одно положение вверх по течению (сторона вверх по течению в направлении движения), по сравнению с положением, в котором определяется правило запрета на въезд, как положение, в котором транспортное средство встречает событие. Извлеченное положение события связано с маршрутом (включая линию связи). Информация 224 о правилах дорожного движения включает в себя светофор, представленный сигналом дорожного движения. Вышеуказанная операция может включать в себя обращение к картографической информации 222 и/или дорожной информации 223.
[0039]
В дополнение или в качестве альтернативы процессор 11 извлекает динамические события, с которыми сталкивается транспортное средство, движущееся по первому маршруту, на основе информации обнаружения из устройства 230 обнаружения. Информация об обнаруженных событиях на основе информации обнаружения может включать в себя существование и положение объектов на первом маршруте. Процессор 11 распознает ситуации, в которых существуют объекты (физические объекты, включая пешеходов, другие транспортные средства и дорожные конструкции, то есть так называемые препятствия), обнаруженные устройством 230 обнаружения, как события, с которыми сталкивается транспортное средство. Когда расстояние между транспортным средством и обнаруженным объектом меньше предварительно определенного значения, процессор 11 может извлечь существование объекта как событие. В дополнение или в качестве альтернативы, когда предполагаемое время, оставшееся до контакта транспортного средства с обнаруженным объектом, меньше предварительно определенного значения, процессор 11 может извлечь существование объекта как событие.
[0040]
Процессор 11 использует информацию о положении объектов для извлечения событий, с которыми сталкивается транспортное средство, движущееся по первому маршруту. К объектам относятся те, которые временно регулируют движение, такие как строительные площадки, сломанные транспортные средства и области, которых следует избегать. Информация о таких объектах может быть включена в дорожную информацию 223. Информация о положениях, в которых существуют объекты, может быть получена от устройств предоставления информации на стороне дороги, таких как ITS.
[0041]
Процессор 11 получает данные о существовании и положении объектов, включая препятствия, на первом маршруте на основе выходных результатов от устройства 230 обнаружения. Процессор 11 обращается к дорожной информации 223 для получения информации о существовании и положении дорожных конструкций на первом маршруте. Эта операция может включать в себя обращение к картографической информации 222 и/или дорожной информации 223.
[0042]
Процессор 11 создает первый план вождения для движения по первому маршруту на основе взаимосвязи между полученной информацией о событиях (существовании и положениях) и транспортным средством. Создание первого плана вождения может быть выполнено в заранее определенном цикле или также может быть выполнено в момент времени, когда расстояние между транспортным средством и перекрестком (событием) меньше предварительно определенного расстояния.
[0043]
Процессор 11 связывает положения встречи с извлеченным множеством событий с маршрутом движения транспортного средства. Процессор 11 размещает/переставляет извлеченное множество событий в порядке встреч с транспортным средством. Процессор 11 получает порядок встреч с событиями из перемещения положения транспортного средства, движущегося по первому маршруту, и положения событий, и размещает события в порядке встреч с транспортным средством. Эта информация, в которой события расположены во временной последовательности встреч, может быть представлена пользователю через устройство 20 вывода, которое будет описано позже.
[0044]
Впоследствии процессор 11 планирует действие движения транспортного средства, движущегося по маршруту. Процессор 11 создает план вождения, когда транспортное средство движется по первому маршруту, используя взаимосвязь (результат оценки) между транспортным средством и множеством событий, с которыми транспортное средство сталкивается во временных рядах при движении по первому маршруту. Процессор 11 учитывает наличие объектов, которые обнаруживаются устройством 230 обнаружения, для создания плана вождения.
[0045]
Процессор 11 размещает множество событий в порядке встреч с транспортным средством и создает инструкцию управления в соответствии с планом последовательного вождения, в котором действие вождения определяется для каждого события. В такой схеме, использующей одномерную ситуационную карту (ODSM), действие вождения в предшествующем или последующем событии влияет на действие вождения в последующем или предшествующем событии. Например, в плане последовательного вождения, определенном один раз, если какое-либо действие вождения изменяется из-за появления нового объекта (другого транспортного средства), это также влияет на другие действия вождения. Изменение действия вождения в событии изменяет время прибытия транспортного средства в событие и, следовательно, влияет на время прибытия в каждое из событий, расположенных во временных рядах. Если время прибытия в событие изменяется, величина перемещения объекта также изменяется, поэтому ситуация в каждом событии также изменяется. Например, когда действием вождения в предшествующем событии является остановка, транспортное средство замедляется независимо от действия вождения в последующем событии. Кроме того, когда действием вождения в последующем событии является остановка, требуется, чтобы транспортное средство по меньшей мере замедлялось, даже если действием вождения в предшествующем событии является движение. Когда скорость транспортного средства становится низкой, увеличение времени до прибытия в событие из-за замедления вызывает изменение ситуации в событии, с которым нужно столкнуться, так что это также влияет на действие вождения на стороне выше по течению. План вождения, имеющий такие технические характеристики, включает в себя уникальную проблему, состоящую в том, что требуется справиться с содержанием каждого из действий вождения, упорядоченных во временных рядах, и возможностью в контенте. Чтобы преодолеть эту проблему, в одном или нескольких вариантах осуществления настоящего изобретения оптимизация условия обнаружения выполняется в соответствии с содержанием каждого из действий вождения, расположенных во временных рядах.
[0046]
Процессор 11 оценивает тип каждого извлеченного события (пересечение, правило дорожного движения или объект), позиционную связь с событием и изменение положения (расстояние, время до контакта, скорость приближения или расстояние после заданного времени), содержание события (содержание правила дорожного движения или атрибута объекта) и т.д. Процессор 11 получает расстояние до события и изменение расстояния, используя скорость транспортного средства, полученную из датчика 262 скорости транспортного средства.
[0047]
Когда событием является правило дорожного движения, процессор 11 обращается к одной или нескольким из информации 224 о правилах дорожного движения, картографической информации 222, дорожной информации 223 и результата обнаружения от устройства 230 обнаружения, чтобы считать тип правила дорожного движения, положение/изменение положения и содержание. Когда событием является сигнал регулирования движения, процессор 11 распознает, является ли правило дорожного движения, указанное сигналом регулирования движения, каким-либо из «Ехать/Осторожно/Стоп» на основе результата распознавания функции распознавания сигнала устройства 230 обнаружения. Процессор 11 также может распознавать правило дорожного движения, указанное сигналом регулирования движения, на основе информации сигнала, которая передается внешней ITS и получается через устройство 30 связи. Когда событие является дорожным знаком, таким как стоп-линия, линия временной остановки, зона запрета остановки или запрет на изменение полосы движения, процессор 11 обращается к информации 224 о правилах дорожного движения, дорожной информации 223 и картографической информации 222, чтобы распознавать положение и содержание дорожного знака, которые обнаружены устройством 230 обнаружения.
Когда событием является объект, такой как пешеход, другое транспортное средство или дорожная конструкция, процессор 11 получает тип транспортного средства или объекта, положение/изменение положения и содержание на основе положения и скорости перемещения объекта, обнаруженной устройством 230 обнаружения.
[0048]
Процессор 11 определяет действие вождения в каждом из извлеченного множества событий. Действия, которые должны быть определены, включают в себя действие движения и действие остановки. Процессор 11 определяет либо действие движения, либо действие остановки для каждого события. Когда событие является правилом дорожного движения и правило дорожного движения требует остановки, процессор 11 определяет, что действием вождения для события является «Стоп». С другой стороны, когда правило дорожного движения разрешает проезд, процессор 11 определяет, что действием вождения для события является «Ехать». Когда событие является объектом, а расстояние до объекта меньше предварительно определенного значения, изменение расстояния не меньше предварительно определенного значения, или время до контакта меньше предварительно определенного значения процессор 11 определяет, что действием вождения для события является «Стоп». С другой стороны, когда расстояние до объекта не меньше, чем предварительно определенное значение, изменение расстояния меньше, чем предварительно определенное значение или время до контакта не меньше, чем предварительно определенное значение, процессор 11 определяет, что действием вождения для события является «Ехать». Процессор 11 создает план последовательного вождения на основе содержимого соответствующих действий, определенного для множества событий.
[0049]
Со ссылкой на фиг. 2A будет описан пример схемы создания плана вождения. Эта схема выполняется процессором 11 и включает в себя определение действий вождения. Процессор 11 определяет действие вождения, которое должно быть предпринято для события, с которым транспортное средство V1 сталкивается при движении по первому маршруту RT1. Процессор 11 учитывает пункт назначения транспортного средства V1, чтобы вычислить маршрут, по которому движется транспортное средство. Вычисленный маршрут является первым маршрутом RT1 в одном или нескольких вариантах осуществления настоящего изобретения. Используя первый маршрут RT1, показанный на фиг. 2A в качестве примера будет описано создание плана вождения при движении по первому маршруту RT1. На первом маршруте RT1 транспортное средство V1 движется в направлении, указанном стрелкой F, проходит через стоп-линию ST1, сигнал SG1 регулирования движения и пешеходный переход CR1 и поворачивает направо на перекрестке P. Событиями, с которыми сталкивается транспортное средство V1 при движении по первому маршруту RT1, являются стоп-линия ST1, сигнал SG1 регулирования движения, пешеходный переход CR1, другое транспортное средство V2, приближающееся к транспортному средству V1, когда транспортное средство V1 въезжает в полосу для правого поворота, и пешеходный переход CR4. Процессор 11 извлекает событие в один момент времени обнаружения. Событие, с которым сталкивается транспортное средство V1, изменяется от момента к моменту, поэтому, если время отличается, положение и движение (например, скорость) объекта также изменяются. Процессор 11 вычисляет мгновенный план вождения с заранее определенным циклом, когда событие изменяется от момента к моменту. Процессор 11 может вычислить план вождения, когда транспортное средство V1 въезжает в область заранее определенного расстояния или меньше от перекрестка (точки пересечения с другим маршрутом) на первом маршруте.
[0050]
Процессор 11 определяет тип каждого извлеченного события (пересечение, правило дорожного движения или объект), позиционную связь с событием и изменение положения (расстояние, время до контакта, скорость приближения или расстояние после заданного времени) и содержание события (содержание правила дорожного движения или атрибута объекта).
[0051]
Процессор 11 распознает событие (стоп-линия ST1), которое ближе всего к транспортному средству V1. Процессор 11 определяет, что стоп-линия ST1 является правилом движения, расстояние от транспортного средства V1 равно D1, время до прибытия - S1, а стоп-линия ST1 - это событие, которое требует временной остановки. Процессор 11 распознает событие (сигнал регулирования движения SG1), которое является вторым наиболее близким к транспортному средству V1 и соответствует стоп-линии ST1. Процессор 11 определяет, что сигнал SG1 регулирования движения является правилом дорожного движения, расстояние от транспортного средства V1 равно D2, время до прибытия S2, а сигнал SG1 регулирования движения является событием, которое запрещает движение (красный/желтый световой сигнал). Стоп-линия ST1 является событием, которое указывает положение, в котором транспортное средство V1 остановлено на стороне выше по потоку от сигнала SG1 регулирования движения, когда транспортное средство V1 собирается въехать на перекресток, и сигнал SG1 регулирования движения дает указание сделать остановку. Сигнал SG1 регулирования движения и стоп-линия ST1 распознаются как отдельные события, но связаны друг с другом в информации 224 о правилах дорожного движения. Содержимое стоп-линии ST1 представляет собой «Стоп», когда сигнал SG1 регулирования движения представляет сигнальную лампу (красный/желтый световой сигнал), которая дает указание сделать остановку, но представляет собой «Ехать», когда сигнал SG1 регулирования движения представляет световой сигнал (синий/зеленый), который инструктирует ехать. На основании того факта, что событие (сигнал SG1 регулирования движения) указывает на запрещение движения, процессор 11 определяет, что действием вождения для события (стоп-линия ST1), связанного с событием (сигнал SG1 регулирования движения), является «Стоп». Стоп-линия ST1 и сигнал SG1 регулирования движения могут рассматриваться как общее событие в управлении вождением этого примера.
[0052]
Процессор 11 распознает событие (пешеходный переход CR1), которое является третьим ближайшим к транспортному средству V1. Процессор 11 определяет, что пешеходный переход CR1 является правилом дорожного движения, расстояние от транспортного средства V1 составляет D2, время до прибытия - S2, а пешеходный переход CR1 - это событие, которое разрешает движение (синий/зеленый световой сигнал). Правилом дорожного движения пешеходного перехода является «Стоп», когда световой сигнал указывает на запрет на въезд, и «Ехать», когда световой сигнал указывает на разрешение на въезд. С другой стороны, правилом дорожного движения пешеходного перехода является «Стоп», когда на пешеходном переходе присутствует пешеход, и «Ехать», когда на пешеходном переходе пешеходов нет. Процессор 11 определяет, что действием вождения для события (пешеходный переход CR1) является «Стоп», поскольку событие (сигнал SG1 регулирования движения) указывает на запрет движения. Есть также пешеход H1, который идет по пешеходному переходу CR1. Устройство 230 обнаружения обнаруживает пешехода H1. На основе результата обнаружения устройства 230 обнаружения (присутствие пешехода H1) процессор 11 определяет, что действием вождения для события (пешеходный переход CR1) является «Стоп».
[0053]
При повороте вправо на перекрестке P процессор 11 извлекает точку (перекресток), в которой первый маршрут пересекается с другой дорогой в качестве события. Процессор распознает событие (перекресток MX12), которое является четвертым ближайшим к транспортному средству V1. Процессор определяет, что перекресток MX12 является перекрестком, расстояние от транспортного средства V1 равно D3, а время до прибытия - S3. Кроме того, присутствует другое транспортное средство V2, приближающееся к перекрестку MX12. Устройство 230 обнаружения обнаруживает другое транспортное средство V2, приближающееся к перекрестку MX12. Устройство 230 обнаружения распознает физический объект, для которого время до столкновения (TTC) для транспортного средства V1 находится в пределах предварительно определенного времени, в качестве объекта. На основе результата обнаружения устройства 230 обнаружения (присутствие другого транспортного средства V2) процессор 11 определяет, что действием вождения для события (перекресток MX12) является «Стоп».
[0054]
Процессор 11 извлекает пешеходный переход CR4, на который транспортное средство въезжает после правого поворота на перекрестке P, в качестве события. Процессор 11 распознает событие (пешеходный переход CR4), которое является пятым ближайшим к транспортному средству V1. Процессор 11 определяет, что пешеходный переход CR4 является правилом дорожного движения, расстояние от транспортного средства V1 равно D4, а время до прибытия - S4. При выезде из зоны пересечения остановка не требуется перед въездом на пешеходный переход. Однако все же необходимо позаботиться о наличии объектов вокруг. Понятно, что при прохождении через пешеходный переход CR4 процессор 11 отслеживает результат обнаружения устройства 230 обнаружения, чтобы подтвердить, что вокруг нет никаких объектов. При условии, что устройство 230 обнаружения не обнаруживает никаких объектов в момент времени до въезда в событие (пешеходный переход CR4), процессор 11 определяет, что действием вождения для события (пешеходный переход CR4) является «Ехать».
[0055]
На основе взаимосвязей между транспортным средством V1 и множеством событий, с которыми транспортное средство V1 сталкивается во временных рядах, процессор 11 определяет либо действие движения, либо действие остановки для каждого события и создает план последовательного вождения с использованием содержания действия, определенного для каждого события. Процессор 11 создает план последовательного вождения для событий, используя взаимосвязи между транспортным средством V1 и множеством событий, с которыми транспортное средство V1 сталкивается при движении по первому маршруту. Это может упростить процесс до создания окончательного плана вождения. Вычислительная нагрузка может быть уменьшена при создании высокоточного плана вождения с учетом необходимых событий.
[0056]
Как описано выше, взаимосвязь между событием и транспортным средством V1 изменяется от момента к моменту, когда изменяется состояние события. Изменение состояния события также приводит к изменению действия вождения. Процессор 11 создает план вождения транспортного средства V1, движущегося по первому маршруту последовательным образом (с предварительно определенным циклом), используя взаимосвязь между каждым событием и транспортным средством V1.
[0057]
Оборудование 100 управления вождением представляет созданный план вождения пользователю. Устройство 20 вывода отображает события, которые извлекаются процессором 11 и размещаются в порядке встреч. Устройство 20 вывода использует дисплей 251 для отображения информации, касающейся плана вождения. Устройство 20 вывода может выводить множество упорядоченных событий голосом или звуком с использованием динамика 252.
[0058]
Фиг. 2B - пример отображения, иллюстрирующий события во временных рядах. Стрелка T указывает направление движения транспортного средства V1 по первому маршруту. Устройство 20 вывода отображает извлеченные события: стоп-линию ST1 и сигнал SG1 регулирования движения; пешеходный переход CR1; перекресток MX12; и пешеходный переход CR4 по стрелке T в качестве оси времени в порядке встреч с транспортным средством V1. Информация, указывающая события, может быть символами, текстовой информацией или абстрактными метками. Цвет, размер и т.д. можно определить произвольно.
[0059]
Устройство 20 вывода отображает действие вождения, определенное процессором 11 для каждого события в связи с этим событием. В информации VW, показанной на фиг. 2B, действие вождения в каждом событии отображается под событием, так что положение вдоль стрелки T является общим для события. Информация, указывающая действия вождения, может быть символами, текстовой информацией или абстрактными метками. Цвет, размер и т.д. можно определить произвольно.
[0060]
Даже когда события включают в себя стационарные объекты, такие как точки пересечения между маршрутами, стоп-линии, определенные в правилах дорожного движения, и дорожные конструкции, а также движущиеся объекты, такие как пешеходы и другие транспортные средства, устройство 20 вывода размещает стационарные объекты и движущиеся объекты в извлеченном множестве событий в порядке встреч с транспортным средством V1, то есть вдоль общей оси времени. Другие транспортные средства включают те, которые приближаются к транспортному средству сзади.
[0061]
Таким образом, события, с которыми транспортное средство V1, движущееся по первому маршруту, встречается, размещаются и отображаются в порядке встреч с транспортным средством V1, и водитель транспортного средства V1 может, таким образом, визуально распознавать, какие виды событий транспортное средство V1 встречает в каком порядке и какие виды действий вождения принимаются.
[0062]
Далее будет описана процедура процесса, выполняемого в системе 1 управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения со ссылкой на блок-схему последовательности операций на фиг. 3. Обзор обработки на каждом этапе описан выше. Ход процесса будет в основном описан здесь.
[0063]
Сначала на этапе S1 процессор 11 получает информацию о транспортном средстве для транспортного средства, которым необходимо управлять. Информация о транспортном средстве включает в себя информацию, касающуюся вождения транспортного средства, такую как текущее положение, направление движения, скорость, ускорение, величина торможения, величина рулевого управления, скорость рулевого управления и ускорение рулевого управления, информация о технических характеристиках транспортного средства и информация о рабочих характеристиках транспортного средства. Информацию о транспортном средстве получают из бортового оборудования 200.
[0064]
На этапе S2 процессор 11 получает информацию обнаружения. Информация обнаружения включает в себя наличие или отсутствие событий и положения событий. Положения событий относятся к положениям вещей, таким как пересечения и объекты, которые запускают процесс определения в управлении вождением. Информация обнаружения включает в себя наличие или отсутствие физического объекта вокруг транспортного средства, атрибут объекта (неподвижный объект или движущийся объект), положение объекта, скорость/ускорение объекта и направление движения объекта. Информация обнаружения может быть получена от бортового оборудования 200, которое включает в себя устройство 230 обнаружения и навигационное устройство 220.
[0065]
На этапе S3 процессор 11 определяет, изменилась ли ближайшая сцена, с которой должно столкнуться транспортное средство V1. Сцена - это сцена, такая как перекресток, через который транспортное средство должно проехать. Например, когда перекресток, через который транспортное средство должно проехать, является сценой, сцена включает в себя события въезда на перекресток, пересечения с другим маршрутом и выезда с перекрестка. Сцена включает в себя множество событий. Сцена, с которой нужно столкнуться, также может быть определена как единица, к которой применяется набор управляющих инструкций, соответствующих событиям. Процессор 11 определяет, что маршрут движения не изменился и прошло ли транспортное средство через сцену, которая является целью управления вождением. Это потому, что необходимость установки новой (следующей) сцены должна быть определена. Когда текущее положение транспортного средства принадлежит маршруту, который уже был рассчитан, процессор 11 определяет, что маршрут движения не изменился. Когда текущее положение транспортного средства не принадлежит маршруту, который уже был рассчитан, процессор 11 определяет, что маршрут движения изменен. Когда текущее положение транспортного средства не принадлежит области, которая была установлена в качестве сцены, которая должна быть пройдена непосредственно перед этим, процессор 11 определяет, что транспортное средство прошло через сцену. Когда текущее положение транспортного средства V1 принадлежит области, которая была установлена в качестве сцены, которая должна быть пройдена непосредственно перед этим, процессор 11 определяет, что транспортное средство еще не прошло через сцену. Когда транспортное средство прошло через сцену, создание и выполнение плана вождения для следующей сцены или события повторяются.
[0066]
Когда на этапе S3 маршрут движения изменяется или когда транспортное средство прошло через сцену, процессор 11 определяет, что сцена изменилась, и выполняет процессы этапов S4-S9. Когда маршрут движения изменяется или когда транспортное средство прошло через сцену, процессор 11 определяет, что сцена изменилась, и выполняет процессы этапов S4-S9. Когда маршрут движения не изменен и транспортное средство еще не прошло через сцену, процессор 11 определяет, что сцена не изменилась, и процесс переходит к этапу S11.
[0067]
На этапе S4 процессор 11 вычисляет первый маршрут, по которому движется транспортное средство V1. Первый маршрут, вычисленный навигационным устройством 220, также может быть использован. Первый маршрут определяется идентификатором дороги, идентификатором полосы движения, идентификатором узла и/или идентификатором линии связи. Эти идентификатор дороги, идентификатор полосы движения, идентификатор узла и идентификатор линии связи определены в картографической информации 222 и/или в дорожной информации 223.
[0068]
На этапе S5 процессор 11 задает сцену, с которой сталкивается транспортное средство V1, движущееся по первому маршруту. Сцена - это область, в которую входят точки, в которых существуют точки пересечения между первым маршрутом и другими маршрутами. Форма точки пересечения с первым маршрутом не ограничена и может быть любой из точки слияния, точки ответвления, перекрестка, T-перекрестка и смежной точки. Сцена является областью, которая включает в себя точки, в которых требуется остановка на первом маршруте в соответствии с информацией 224 о правилах дорожного движения. Процессор 11 обращается к картографической информации 222, дорожной информации 223 и/или информации 224 о правилах дорожного движения, чтобы задать область R1, которая является сценой, в которой транспортное средство V1 с высокой вероятностью встретит события (см. Фиг. 2). Примеры сцен, с которыми сталкивается транспортное средство V1, включают в себя область вблизи перекрестка, область вблизи точки слияния полос движения, область вблизи пешеходного перехода, область вблизи стоп-линии, район вблизи железнодорожных переездов и область вблизи строительной площадки.
[0069]
На этапе S6 процессор 11 извлекает один или несколько вторых маршрутов, имеющих точки пересечения с первым маршрутом. Процессор 11 обращается к картографической информации 222 и/или дорожной информации 223, чтобы извлечь вторые маршруты, имеющие точки пересечения с первым маршрутом. Процессор 11 обращается к информации о линии связи (информации об узле), определенной в картографической информации 222. В месте, в котором два или более маршрутов пересекаются друг с другом, информация о линии связи (информация об узле) соединяется с двумя или более другими линиями связи. Процессор 11 извлекает вторые маршруты, которые пересекаются с первым маршрутом, из ситуации соединения информации о линии связи (информации об узле).
[0070]
На этапе S7 процессор 11 извлекает события, с которыми транспортное средство V1 сталкивается в заданной сцене. Процессор 11 извлекает точки пересечений между первым маршрутом и вторыми маршрутами как события. Как будет понятно, в точке объединения маршрутов две или более линии связи связаны с другой линией связи. На перекрестке окрестность въезда на перекресток соответствует точке разветвления полос движения, в то время как окрестность выезда с перекрестка соответствует точке слияния полос движения. Таким образом, точка, в которой одна линия связи соединена с двумя или более другими линиями связи, может быть извлечена как событие, в котором первый маршрут и один или несколько вторых маршрутов пересекаются друг с другом на выходной стороне перекрестка. Другими словами, один или несколько вторых маршрутов могут быть обнаружены на выезде из перекрестка путем обнаружения существования точки, в которой одна линия связи соединена с двумя или более другими линиями связи. Кроме того, информация о линии связи также определена для пешеходного перехода, и пешеходный переход, пересекающийся с первым маршрутом, может быть обнаружен в качестве второго маршрута путем определения пересечения между линией первого маршрута и линией пешеходного перехода. Процессор 11 извлекает вещи, при которых требуется временная остановка на первом маршруте в соответствии с информацией 224 о правилах дорожного движения, как события.
[0071]
Положения извлеченных событий сохраняются в связи с маршрутами. Положения извлеченных событий также могут быть сохранены в связи с картографической информацией 222 и/или дорожной информацией 223. При создании плана движения, который будет выполнен позже, действие вождения определяется для каждого извлеченного события (положение каждого события).
[0072]
На этапе S8 процессор 11 определяет действие вождения для каждого события. Действиями вождения являются «Стоп» и «Ехать». Когда событие - это место, в котором запрещено движение (временная стоп-линия или сигнал остановки) или тому подобное, действием вождения в этом событии является «Стоп». В дополнение или в качестве альтернативы, когда вероятность контакта с объектом высока в событии, действием вождения в событии также является «Стоп». С другой стороны, когда событие является местом, в котором разрешено движение (сигнал «Ехать») или тому подобное, действием вождения в событии является «Ехать». В дополнение или в качестве альтернативы, когда вероятность контакта с объектом низкая в событии, действием вождения в этом событии также является «Ехать». Возможность контакта определяется на основе разницы во времени между временем прибытия транспортного средства в событие и временем прибытия объекта в событие.
[0073]
На этапе S9 процессор 11 размещает извлеченное множество событий в порядке встреч с транспортным средством V1. Устройство 20 вывода отображает размещенные события на дисплее 251 (см. Фиг. 2B). Устройство 20 вывода может выводить размещенные события голосом или звуком с использованием динамика 252. Это отображение может быть выполнено после создания плана вождения.
[0074]
На этапе S11 процессор 11 проверяет вновь полученную информацию обнаружения. Ситуация вокруг движущегося транспортного средства меняется от момента к моменту. Ситуации вокруг не являются фиксированными, например, вызванные движением самого транспортного средства, изменением позиционных отношений с другими транспортными средствами, изменением положения пешеходов, появлением новых объектов и изменением точности обнаружения из-за изменения положения. То есть наличие и наличие или отсутствие событий, которые извлекаются на основе информации обнаружения, полученной на этапе S2, должны проверяться последовательно. Информация обнаружения, проверенная на этапе S11, является информацией обнаружения, полученной в более поздний момент времени, чем информация обнаружения, полученная на этапе S2. Процессор 11 извлекает объекты, с которыми сталкивается транспортное средство, движущееся по первому маршруту, на основе новой информации обнаружения. Процессор 11 извлекает информацию об объектах, существующих на одном или нескольких вторых маршрутах, которые пересекаются с первым маршрутом. Эта информация может быть включена в информацию об объекте, полученную на этапе S2.
[0075]
На этапе 12 процессор 11 связывает вновь обнаруженные объекты с одним или несколькими событиями. Пешеходный переход как событие и пешеход как объект могут быть связаны друг с другом. Когда точка пересечения со вторым маршрутом является событием, событие может быть связано с другим транспортным средством, движущимся по второму маршруту. Объекты, существующие на первом маршруте, могут быть определены как события.
[0076]
На этапе S13 процессор 11 учитывает вновь обнаруженные события, чтобы определить действие вождения в каждом событии. Как описано выше, действие вождения определяется на основе правила дорожного движения в событии и возможности контакта между транспортным средством и объектом. Возможность контакта определяется на основе расстояния между транспортным средством и объектом или времени, оставшегося до контакта транспортного средства с объектом. Время до контакта рассчитывается с использованием скорости транспортного средства и объекта. Возможность контакта рассчитывается исходя из времени прибытия транспортного средства и объекта в событие. Действие вождения в событии определяется на основе возможности контакта в событии.
[0077]
Обработка от этапа S11 до этапа S13 предпочтительно выполняется в заранее определенном цикле. В зависимости от условия, невозможно перейти с этапа S8 на этап S14.
[0078]
Когда время, в которое транспортное средство прибывает в событие, и время, в которое объект прибывает в событие, разделены на предварительно определенное время или более, вероятность контакта низка, поэтому действие вождения «Ехать» определяется для события. С другой стороны, когда время, в которое транспортное средство прибывает в событие, и время, в которое объект прибывает в событие, разделены меньше, чем на предварительно определенное время, вероятность контакта высока, поэтому действие вождения «Стоп» определено для события. Аналогично, что касается расстояния, когда расстояние между транспортным средством и объектом, который должен прибыть в событие, является предварительно определенным расстоянием или более, вероятность контакта является низкой, поэтому для события определяется действие вождения «Ехать». С другой стороны, когда расстояние между транспортным средством и объектом, который должен прибыть в событие, меньше предварительно определенного расстояния, вероятность контакта высока, поэтому для события определяется действие вождения «Стоп». Когда событие является объектом, возможность контакта определяется на основе позиционных отношений между транспортным средством и объектом.
[0079]
Процессор 11 определяет движение объекта на основе информации обнаружения или изменения во времени информации обнаружения. В этом определении процессор 11 оценивает позиционные отношения между объектом и транспортным средством или событием в предположении направления движения и скорости объекта. Степень свободы (величина отклонения) в направлении движения объекта варьируется в зависимости от атрибута объекта, такого как транспортное средство, двухколесное транспортное средство или пешеход, движущийся по дороге. Процессор 11 оценивает направление движения объекта на основе атрибута объекта, проанализированного по захваченному изображению или тому подобному, и вычисляет вероятность того, что предполагаемое направление движения совпадает с направлением, в котором существует транспортное средство. За счет сужения направлений движения объекта и изменения порога степени совпадения между направлением движения и направлением, в котором существует транспортное средство, уровень значения вероятности того, что предполагаемое направление движения совпадает с направлением, в котором транспортное средство существует, можно контролировать.
Диапазон (значение отклонения) предполагаемой скорости объекта различается в зависимости от атрибута объекта, такого как транспортное средство, двухколесное транспортное средство или пешеход, движущийся по дороге. Процессор 11 вычисляет время прибытия объекта в событие в соответствии с диапазоном предполагаемой скорости объекта и сравнивает это время со временем прибытия транспортного средства в событие, которое рассчитывается на основе информация о транспортном средстве, чтобы вычислить вероятность того, что разница во времени между моментом, когда транспортное средство прибывает в событие, и моментом, когда объект прибывает в событие, находится в пределах заранее определенного времени. Сужая диапазон предполагаемой скорости объекта и изменяя порог для оценки разницы во времени, можно управлять уровнем значения вероятности того, что транспортное средство и объект прибывают в событие, по существу, в одно и то же время.
[0080]
Процессор 11 оценивает направление и скорость движения объекта на основе атрибута объекта, анализируемого по захваченному изображению или тому подобному, и вычисляет вероятность контакта с транспортным средством, движущимся с предполагаемой скоростью. Вероятность контакта с транспортным средством рассчитывается путем умножения поведения объекта (направление движения, скорость и т.д.) на коэффициент. Когда вероятность не меньше заранее определенной вероятности в качестве порога, процессор 11 рассматривает объект как интересующий объект, который может вступить в контакт с транспортным средством, в то время как когда вероятность меньше предварительно определенной вероятности, процессор 11 обрабатывает объект как объект, который не соприкасается с транспортным средством. Процессор 11 изменяет условие обнаружения, регулируя вероятность того, что объект движется в направлении к транспортному средству, диапазон (значение отклонения) предполагаемой скорости объекта и пороговое значение для оценки объекта. Увеличивая вероятность того, что объект движется в направлении к транспортному средству, увеличивая диапазон предполагаемой скорости объекта или изменяя пороговое значение для оценки объекта на низкое значение, условие обнаружения может быть задано с высокой вероятностью того, что выполнено определение, что объект вступает в контакт с транспортным средством.
[0081]
На основе поведения объекта вокруг транспортного средства процессор 11 вычисляет вероятность того, что объект вступит в контакт с транспортным средством. Когда вероятность того, что объект вступит в контакт с транспортным средством, превышает предварительно определенный порог, процессор 11 определяет порог вероятности в качестве условия обнаружения, чтобы распознать объект как интересующий объект.
[0082]
На основе поведения объекта вокруг транспортного средства процессор 11 вычисляет вероятность того, что объект вступит в контакт с транспортным средством. Когда вероятность того, что объект вступит в контакт с транспортным средством, выше, чем предварительно определенный порог, процессор 11 определяет, в качестве условия обнаружения, способ вычисления вероятности того, что объект распознается как интересующий объект.
[0083]
Процессор 11 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения устанавливает вероятность того, что объект и транспортное средство вступают в контакт друг с другом, и пороговое значение для вероятности в соответствии с содержанием действия вождения в событии. Процессор 11 регулирует (корректирует) направление движения и скорость движения объекта, которые определяются на основе изменения во времени информации обнаружения, атрибута объекта и т.п., в соответствии с содержанием действия вождения. Конкретные схемы будут описаны позже.
[0084]
На этапе S14 процессор 11 создает план вождения, в котором действие вождения определяется для каждого события. Процессор 11 создает план вождения, в котором действие вождения связано с каждым из множества событий, которые принадлежат области Q1, заданной как сцена. План вождения в этом примере представляет собой набор инструкций для упорядочения выделенного множества событий в порядке встреч с транспортным средством и определения действия вождения для каждого события. Единица плана вождения особо не ограничена. В этом примере сцена столкновения с перекрестком является целью плана вождения, но может быть предварительно создан план вождения до места назначения, или может быть создан план вождения с точки зрения заранее определенного количества событий.
[0085]
На этапе S15 процессор 11 задает условие обнаружения на основе содержания действия вождения в событии. Процессор 11 управляет бортовым оборудованием для выполнения процесса обнаружения в соответствии с упомянутым определенным условием обнаружения. Условие обнаружения в одном или нескольких вариантах осуществления настоящего изобретения может быть задано для каждой точки. Условие обнаружения может быть задано для каждого события, для которого указана точка, поскольку условие обнаружения может быть задано для каждой точки. Фиг.4 - концептуальная схема для описания ситуации, в которой условие обнаружения задается для каждой точки. Как показано на фиг. 4, условия обнаружения R1-R6 могут быть соответственно заданы для точек P1-P6, которые заданы на первом маршруте RT1, по которому движется управляемое транспортное средство V1. Условия обнаружения R1-R6 могут быть общим условием или также могут быть разными условиями. То есть широкий диапазон обнаружения может быть задан в одной точке, в то время как узкий диапазон обнаружения может быть задан в другой точке. Инструкции по настройке, включая условия обнаружения, могут включать в себя диапазон обнаружения (расстояние вдоль направления движения, расстояние вдоль направления ширины транспортного средства, высоту, диапазон сканирования, угол обзора, фокусное расстояние и т.д.), применимое событие (применимое положение) или применимое время (точка прохождения или время).
[0086]
На основе содержания действия вождения, определенного для первого события, с которым транспортное средство сталкивается ранее, процессор 11 определяет второе условие обнаружения, касающееся одного или более вторых событий, с которыми транспортное средство сталкивается после первого события, и задает второе условие как замену для первого условия обнаружения, которое применяется в настоящее время. Второе событие может быть событием, которое транспортное средство встречает рядом с первым событием. Второе событие также может быть одним из множества событий, с которыми транспортное средство сталкивается после первого события.
Процессор 11 может определить секцию OVA на стороне вверх по потоку от первого события PA и определить второе условие обнаружения, касающееся второго события, с которым транспортное средство встречается следующим, на основе содержания действия вождения, определенного для первого события, которое получают, когда транспортное средство находится в положении, которое принадлежит секции OVA. Секция OVA может быть определена как секция от первой точки первого заданного расстояния на стороне выше по потоку (сторона транспортного средства) от события до второй точки второго расстояния. Первая точка может быть установлена как позиция события.
[0087]
Процессор 11 размещает множество событий в порядке встреч с транспортным средством и создает инструкции управления в соответствии с планом последовательного вождения, в котором действие вождения определяется для каждого события. Как описано выше, в схеме, использующей такую одномерную карту, действие вождения в предшествующем или последующем событии влияет на действие вождения в последующем или предшествующем событии. Например, при условии, что действием вождения в последующем событии является остановка, даже когда действием вождения в предшествующем событии является движение, увеличение времени до прибытия из-за замедления вызывает изменение ситуации. Когда действием вождения в предшествующем событии является остановка, транспортное средство замедляется независимо от действия вождения на стороне ниже по потоку, поэтому время прибытия в событие откладывается. В это время автомобиль движется с низкой скоростью.
Процессор 11 задает условие обнаружения для события, с которым транспортное средство встречается следующим, на основе действия вождения в относительно предшествующем событии. Таким образом, условие обнаружения для события, с которым транспортное средство сталкивается в следующий раз, может быть задано в соответствии с действием вождения в самом последнем событии, и, следовательно, можно задать условие обнаружения, подходящее для действия вождения в следующем событии, на которое влияет действие вождения в событии, с которым транспортное средство сталкивается ранее. Коэффициент успешности (степень завершения) плана вождения может быть увеличен, потому что действие вождения и план вождения могут быть созданы с использованием информации обнаружения, которая следует за соответствующим условием обнаружения.
[0088]
В этом процессе процессор 11 задает второе условие обнаружения в момент времени, когда действие вождения в первом событии, с которым транспортное средство сталкивается ранее, переключается с остановки на движение. Когда происходит первое событие, фиксируется, что время прибытия в следующее второе событие является коротким; поэтому, применяя второе условие обнаружения в этот момент времени, условие обнаружения, подходящее для ситуации, может быть применено в момент времени, когда ситуация зафиксирована. Соответствующее условие обнаружения задается в подходящее время, и, таким образом, возможно получать только необходимую информацию, а не получать ненужную информацию. Это может снизить вычислительную нагрузку при автономном вождении при прохождении через сцену, включая события.
[0089]
Факторы условия обнаружения будут описаны.
Факторы условия обнаружения включают в себя (1) диапазон обнаружения, (2) способ вычисления вероятности контакта с объектом и (3) способ сужения объектов, которые должны быть извлечены. Процессор 11 задает фактор условия обнаружения и изменяет фактор условия обнаружения в устройстве 230 обнаружения. Каждый фактор будет описан.
(1) «Диапазон обнаружения» включает в себя размер (площадь), длину (длину вдоль направления движения), ширину (длину вдоль направления ширины транспортного средства) и высоту (длина в направлении, по существу перпендикулярном поверхности для движения) области обнаружения и диапазон сканирования (угол), угол зрения или фокусное расстояние в области обнаружения. Они обозначены в условии обнаружения.
(2) «Способ вычисления вероятности контакта с объектом» относится к заданию условий для направления движения объекта, скорости объекта и диапазона перемещения объекта при определении существования объектов, которые вступают в контакт с транспортным средством. Они обозначены в условии обнаружения. Как описано выше, направление движения объекта, скорость объекта и диапазон перемещения объекта различаются в зависимости от атрибута объекта. Пешеход, имеющий высокую степень свободы в направлении движения, имеет другой вывод относительно того, рассматривается ли пешеход как объект, в зависимости от определения, движется ли пешеход к транспортному средству или удаляется от транспортного средства. Процессор 11 вычисляет вероятность контакта между объектом и транспортным средством, используя направление движения объекта, скорость движения объекта и диапазон перемещения объекта, которые являются определенными значениями, заданными на основе предварительно определенных вероятностей, и соответствующие коэффициенты. Когда действием вождения в первом событии является движение, коэффициент задается ниже, чем в случае остановки, в то время как, когда действием вождения в первом событии является остановка, коэффициент задается выше, чем в случае движения. Процессор 11 в соответствии с одним или несколькими вариантами осуществления настоящего изобретения изменяет направление движения объекта, скорость объекта и диапазон перемещения объекта, которые являются определенными значениями, так что вероятность того, что объект вступит в контакт с транспортным средством увеличивается или уменьшается. В дополнение или в качестве альтернативы, когда действием вождения в первом событии является движение, коэффициент задается выше, чем в случае остановки, в то время как, когда действием вождения в первом событии является остановка, коэффициент задается ниже, чем в случае движения. Это позволяет регулировать, рассматривать ли объект, вступающий в контакт с транспортным средством, как интересующий объект.
(3) Обработка «Сужение подлежащих извлечению объектов» относится к условию обнаружения для извлечения только встречных транспортных средств и транспортных средств, двигающихся в перекрестном направлении, которые могут вступить в контакт с транспортным средством, из всех объектов, включенных в информацию обнаружения. Например, объекты, которые уже прошли через событие до прибытия транспортного средства к событию, не извлекаются как объекты.
[0090]
Далее будет описан способ определения условия обнаружения. Условие обнаружения определяется на основе содержания действия вождения, определенного для события.
Фиг. 5 иллюстрирует подпрограмму, связанную с этапом S15 (изменение условия обнаружения) на фиг. 3.
Сначала на этапе S21 проверяется необходимость процесса изменения условия обнаружения. Процессор 11 определяет, следует ли переключить условие обнаружения с первого условия обнаружения, которое в настоящее время применяется, на второе условие обнаружения, на основе величины изменения движения объекта, полученной из изменения во времени информации обнаружения. Когда величина изменения перемещения объекта составляет не менее предварительно определенного значения, процессор 11 выполняет процесс изменения условия обнаружения на этапе S15. В противном случае процессор 11 не выполняет процесс изменения условия обнаружения. Когда движение объекта не изменяется, выполняется определение, что изменение условия обнаружения не является необходимым. Например, в ситуации (положение или время), когда пешеходов или других транспортных средств почти нет или движение является постоянным, процесс повторного задания условия обнаружения не выполняется. С другой стороны, когда действие вождения изменяется, например, в случае, когда пешеход возле пешеходного перехода внезапно начинает движение, условие обнаружения также пересматривается.
[0091]
Когда величина изменения движения объекта меньше предварительно определенного значения, вероятность того, что определение действия вождения изменяется, является низкой. Когда определение действия вождения не изменяется, задание условия обнаружения, вероятно, будет поддерживаться. Это дает возможность надлежащего определения изменения/поддержания условия обнаружения, и, таким образом, можно выполнить управление вождением, подходящее для реальной ситуации. Это может подавить неприятные ощущения, возникающие у пассажиров из-за частых изменений условий обнаружения.
[0092]
На этапе 22 процессор 11 определяет, является ли действием вождения «Ехать». После определения «Ехать» следует этап S23.
На этапе S23 процессор 11 задает следующие условия A обнаружения (шаблон A) в соответствии с действием вождения «Ехать». В одном или нескольких вариантах осуществления настоящего изобретения каждое из первого условия обнаружения и второго условия обнаружения имеет «условия обнаружения A» и «условия обнаружения B», которые будут описаны далее.
(1) Условие обнаружения, при котором может быть обнаружен объект, имеющий относительно короткое время до прибытия в целевое событие.
(2) Условие обнаружения, при котором диапазон обнаружения для обнаружения объекта является относительно узким.
(3) Условие обнаружения, при котором вероятность определения того, что объект вступает в контакт с транспортным средством, задается относительно низкой (определяется относительно низкой).
[0093]
Когда на этапе 22 определено, что действием вождения не является «Ехать», действием вождения является «Стоп» (этап S24), и процесс переходит к этапу S25.
На этапе S25 процессор 11 задает следующие условия B обнаружения (шаблон B) в соответствии с определением того, что действием вождения является «Стоп».
(1) Условие обнаружения, при котором может быть обнаружен объект, имеющий относительно длительное время до прибытия в целевое событие.
(2) Условие обнаружения, при котором диапазон обнаружения для обнаружения объекта является относительно широким.
(3) Условие обнаружения, при котором вероятность определения того, что объект вступает в контакт с транспортным средством, задается относительно высокой (определяется относительно высокой).
[0094]
Когда настройка условий обнаружения завершена, процесс переходит к этапу S16. Процессор 11 создает план движения. На этапе S16 на основе информации обнаружения, полученной в соответствии с измененными условиями обнаружения, выполняются процессы этапов S11-S13, чтобы повторно создать новый план вождения. Проверка информации обнаружения, выполняемой на этапе S16, то есть извлечение нового объекта, ассоциация с событием и определение действия вождения для события, могут быть такими же, как те, которые выполнялись ранее на этапах S4-S8, или те, которые выполнялись в прошлый раз на этапах S11-S13 или также могут быть разными процессами.
[0095]
Подходящие условия обнаружения могут быть заданы путем определения каждого условия обнаружения на основе содержания действия вождения. Во время выполнения управления вождением изменяется движение управляемого транспортного средства, а также меняется ситуация вокруг. Установив каждое условие обнаружения в соответствии с действием вождения, можно точно воспринимать объекты, которые должны быть обнаружены, во время управления вождением и изменения ситуации объектов. В новых условиях обнаружения объекты могут быть обнаружены в соответствии с действием вождения, и поэтому возможно выполнить соответствующее управление вождением, которое следует фактической ситуации. Как правило, пассажир, имеющий опыт вождения, меняет точку обзора и поле зрения в соответствии с ситуацией и корректирует результат определения в соответствии с ситуацией. В одном или нескольких вариантах осуществления настоящего изобретения информация обнаружения получается в соответствии с условиями обнаружения, соответствующими действиям вождения, определенным в плане вождения, и план вождения задается или пересматривается на основе информации обнаружения. Это может подавить неприятные ощущения, которые испытывают пассажиры, которые осознают изменение ситуации. В соответствии со схемой задания условий обнаружения, соответствующих действиям вождения, определенным ранее, план вождения может быть создан, чтобы реагировать на изменения ситуации в каждом конкретном случае, и поэтому возможно плавно проходить через сложные сцены, такие как перекрестки. Кроме того, соответствующая информация обнаружения может быть получена для выполнения процесса обнаружения и тому подобного для объектов на основе информации обнаружения с соответствующим количеством информации, поскольку применяются условия обнаружения, соответствующие действиям вождения, а не применяются единые условия обнаружения. Другими словами, можно подавлять получение избыточной информации обнаружения и выполнять процесс обнаружения и тому подобное для объектов на основе информации обнаружения с минимальным количеством информации. Задание соответствующих условий обнаружения позволяет эффективно использовать системные ресурсы. В технологии автономного управления вождением на сложных транспортных магистралях, таких как перекрестки, в то время как нагрузка обработки информации огромна, задержка обработки не допускается и является важной технической проблемой. Если определение задерживается даже на мгновение, может возникнуть ситуация, в которой транспортное средство останавливается на перекрестке. Соответствующее задание условий обнаружения в соответствии с действиями вождения в событиях может снизить нагрузку на обработку информации, а также способствовать увеличению скорости обработки.
В одном или нескольких вариантах осуществления настоящего изобретения второе условие обнаружения для второго события задается на основе действия вождения в первом событии, и поэтому возможно получить условие обнаружения в соответствии с изменением в предшествующей ситуации и оперативно отражать условие обнаружения в последующем процессе обнаружения. Это позволяет получать информацию, необходимую для ситуации.
[0096]
Способы задания условий обнаружения будут конкретно описаны ниже со ссылкой на фигуры. В качестве содержания действий вождения «Ехать» обозначается круглым знаком «ЕХАТЬ» или текстом «ЕХАТЬ», а «Стоп» указывается знаком «X» для «Не ЕХАТЬ» или текстом «Не Ехать». На фигурах, иллюстрирующих примеры настройки с первого по пятый, транспортное средство V1 поворачивает направо в сцене Q1 перекрестка вдоль первого маршрута. В сцене Q1 транспортное средство V1 встречает событие PA прохождения (пересечения) пешеходного перехода, событие PB пересечения маршрута движения встречного транспортного средства и событие PC прохождения (пересечения) другого пешеходного перехода.
<Первый пример настройки>
Первый пример настройки будет описан со ссылкой на фиг. 6А и фиг. 6В. События PA, PB и PC, показанные на фиг. 6А и фиг. 6B - обычные события.
Фиг. 6А - схема, иллюстрирующая диапазон R0 обнаружения для второго события PB в момент времени T0, а фиг. 6B - схема, иллюстрирующая диапазон R1 обнаружения для второго события PB в момент времени T1 после момента времени T0. Показанные здесь диапазоны R0 и R1 обнаружения могут быть диапазонами обнаружения датчиков 260 или также могут быть диапазонами, в которых процессор 11 обнаруживает OB объекта. В этом примере область Q1 перекрестка P будет описана как сцена, в которой выполняется управление вождением. В оба момента T0 и T1 транспортное средство V1 движется в секции OVA, которая находится в пределах предварительно определенного расстояния на стороне вверх по потоку от события PA. В оба момента времени T0 и T1 процессор 11 вычисляет действие вождения в общем событии PA и задает условие обнаружения для события PA.
[0097]
Как показано на фиг. 6А управляемое транспортное средство V1 движется по маршруту RT1 для проезда через перекресток Q1. Транспортное средство V1 проходит через событие PA, определенное в точке PA (обозначается тем же символом, что и событие). Пешеход M1, который является объектом OBA, существует вблизи пешеходного перехода, который является событием PA, с которым транспортное средство V1 сталкивается ранее. Процессор 11 определяет, что расстояние между пешеходом M1 и пешеходным переходом не меньше, чем предварительно определенное расстояние, и определяет, что действием вождения в событии PA является «Ехать».
[0098]
Как показано на фиг. 6B, управляемое транспортное средство V1 движется по маршруту RT1. Процессор 11 отслеживает движение объекта во времени. Пешеход M1, который не был оценен как объект в момент времени T0, двинулся и вошел на пешеходный переход в момент времени T1. Процессор 11 определяет, что расстояние между пешеходом M1 и пешеходным переходом меньше предварительно определенного расстояния, и определяет, что действием вождения в случае PA является «Стоп».
[0099]
Процессор 11 задает условия обнаружения так, что второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии PA является «Ехать», является условием обнаружения шаблона A для обнаружения объекта с относительно коротким временем до прибытия во второе событие PB по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является «Стоп». Когда действие вождения транспортного средства V1 представляет собой «Ехать», время до прибытия в первое событие PA и время до прибытия во второе событие PB является коротким. В таком случае достаточно, чтобы транспортное средство V1 могло распознать объект OB, который прибывает во второе событие PB за короткое время. То есть, когда действием вождения транспортного средства V1 является «Ехать», выполняется процесс обнаружения, чтобы исключить OB объекта, который существует возле второго события PB, но существует в положении, из которого объект OB не прибывает во второе событие PB в течение заданного времени.
[0100]
Объект OB с коротким временем до прибытия может быть определен на основе того факта, что расстояние между вторым событием PB и объектом OB мало или скорость OB объекта высока. Процессор 11 задает условия обнаружения так, что второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии PA является «Ехать», является условием обнаружения, в котором диапазон обнаружения для обнаружения объекта OB является относительно узким по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является «Стоп». Размер диапазона обнаружения может оцениваться на основе площади области обнаружения, длины вдоль направления движения транспортного средства V1, или длины в направлении ширины транспортного средства V1. С той же точки зрения процессор 11 может задавать условия обнаружения таким образом, чтобы второе условие обнаружения относительно второго события, когда действием вождения в первом событии PA является «Ехать», является условием обнаружения для извлечения объекта OB с относительно высокой скоростью приближения ко второму событию PB по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является «Стоп».
[0101]
Чтобы получить условие обнаружения, при котором диапазон обнаружения для обнаружения объекта OB является относительно узким, процессор 11 регулирует траекторию движения на маршруте, по которому движется транспортное средство V1. Процессор 11 задает условия обнаружения таким образом, чтобы вторым условием обнаружения для второго события, когда действием вождения в первом событии является движение, было условие обнаружения, при котором траектория движения транспортного средства изменяется так, что диапазон обнаружения для обнаружения объекта является относительно узким по сравнению со вторым условием обнаружения для второго события, когда действием вождения в первом событии является остановка.
Диапазон обнаружения во время движения может включать в себя слепое пятно/слепую зону (окклюзия). Нельзя сказать, что такая слепая зона является практически диапазоном обнаружения, поскольку объект не может быть обнаружен в слепой зоне, поэтому по существу диапазон обнаружения является узким. Когда действием вождения в событии является «Ехать», процессор 11 принимает даже состояние, в котором диапазон обнаружения включает в себя окклюзию, чтобы сузить диапазон обнаружения, и, следовательно, задает траекторию движения транспортного средства так, чтобы диапазон обнаружения для обнаружения объекта становится относительно узким. То есть, независимо от наличия окклюзии, процессор 11 вычисляет оптимальную опорную траекторию движения (маршрут) в каждой полосе движения, включенной в маршрут к пункту назначения, и применяет траекторию движения к автономному управлению вождением. Опорная траектория движения (маршрут) в процессе автономного вождения включает в себя любую из траектории, расположенной приблизительно в центре полосы движения, траектории, в которой включенные искривления не превышают заранее определенного значения, или траектории, в которой величины изменения включенных искривлений не превышают предварительно определенное значение.
[0102]
Таким образом, когда действие вождения в первом событии PA имеет значение «Ехать», объект OB, который находится ближе ко второму событию PB или имеет более короткое время до прибытия во второе событие PB, может быть выборочно обнаружен, чем когда действием вождения в первом событии PA является «Стоп». Когда действием вождения транспортного средства V1 в первом событии является «Ехать», время для транспортного средства V1, чтобы прибыть в первое событие PA, и время для транспортного средства V1, чтобы прибыть во второе события PB являются относительно короткими, чем значения, когда действием вождения в первом событии является «Стоп». В таком случае целесообразно интенсивно контролировать существующий объект OB, ограничивая близкий диапазон, в котором расстояние до второго события PB меньше, чем первое предварительно определенное значение, или время до прибытия во второе событие PB меньше, чем другое первое заранее определенное значение. Переключая условие обнаружения, можно исключить из объектов определения объект OB, существующий в дальнем диапазоне, в котором расстояние до второго события PB не меньше, чем первое предварительно определенное значение, и время до прибытия во второе событие PB не меньше, чем другое первое заданное значение. Может быть предотвращено получение ненужной информации обнаружения при сохранении точности обнаружения для объекта OB. В результате вычислительная нагрузка может быть уменьшена, а системные ресурсы могут использоваться эффективно.
[0103]
В дополнение или в качестве альтернативы, когда действием вождения в первом событии PA является «Ехать», процессор 11 задает второе условие обнаружения в условие обнаружения, которое включает в себя диапазон обнаружения, относящийся ко второму событию PB. Диапазон обнаружения относительно второго события PB относится к области в пределах предварительно определенного диапазона от контрольного положения второго события PB. Форма диапазона обнаружения конкретно не ограничена и соответствующим образом определяется в соответствии с длиной вдоль направления движения, длиной по ширине дороги и тому подобным. Когда первым событием является «Ехать», считается, что время до прибытия во второе событие, которое должно встретиться следующим, является коротким. Инициируемый тем, что первым событием PA является «Ехать», диапазон обнаружения второго условия обнаружения выполняется так, чтобы включать в себя диапазон обнаружения относительно второго события, тем самым позволяя оперативно получать необходимую информацию обнаружения вокруг второго события PB. Точность плана вождения может поддерживаться, потому что информация обнаружения, подходящая для плана вождения, может быть получена в подходящее время.
[0104]
<Второй пример настройки>
Второй пример настройки будет описан со ссылкой на фиг. 7А и фиг. 7В. События PA, PB и PC, показанные на фиг. 7А и фиг. 7B - обычные события.
Фиг. 7А - схема, иллюстрирующая диапазон R0 обнаружения во втором событии PB в момент времени T0, а фиг. 7B - схема, иллюстрирующая диапазон R1 обнаружения во втором событии PB в момент времени T1 после момента времени T0. Показанные здесь диапазоны R0 и R1 обнаружения могут быть диапазонами обнаружения датчиков 260 или также могут быть диапазонами, в которых процессор 11 обнаруживает объект OB. В этом примере область Q1 перекрестка P будет описана как сцена, в которой выполняется управление вождением. В оба момента T0 и T1 транспортное средство V1 движется в секции OVA, которая находится в пределах предварительно определенного расстояния на стороне выше по потоку от события PA. В оба момента времени T0 и T1 процессор 11 вычисляет действие вождения в общем первом событии PA и задает условие обнаружения для второго события PB.
[0105]
Как показано на фиг.7А управляемое транспортное средство V1 движется по маршруту RT1 для проезда через перекресток Q1. Транспортное средство V1 проходит через первое событие PA, определенное в точке PA (обозначается тем же символом, что и у события). Пешеход M1, который является объектом OBA, движется по пешеходному переходу, который является первым событием PA, с которым транспортное средство V1 сталкивается ранее. Процессор 11 определяет, что расстояние между пешеходом M1 и пешеходным переходом меньше предварительно определенного расстояния, и определяет, что действием вождения в первом событии PA является «Стоп».
[0106]
Как показано на фиг. 7B управляемое транспортное средство V1 движется по маршруту RT1. Процессор 11 контролирует движение объекта во времени. Пешеход M1, который шел по пешеходному переходу в момент T0, отошел от пешеходного перехода в момент T1. Процессор 11 определяет, что расстояние между пешеходом M1 и пешеходным переходом не меньше предварительно определенного расстояния, и определяет, что действием вождения в первом событии PA является «Ехать».
[0107]
Процессор 11 задает условия обнаружения таким образом, чтобы второе условие обнаружения, касающееся второго события PB, когда действием вождения в первом событии PA является «Стоп», было условием обнаружения шаблона B для обнаружения объекта с относительно долгим временем до прибытия во второе событие PB по сравнению со вторым условием обнаружения, относящимся ко второму событию PB, когда действием вождения в первом событии PA является «Ехать». Когда действием вождения транспортного средства V1 в первом событии PA является «Стоп», время до прибытия в первое событие PA и время прибытия во второе событие PB очень велики. В таком случае транспортное средство V1 контролирует не только объект OB, который прибывает во второе событие PB за короткое время, но также и удаленный объект OB. Можно принять во внимание, что пешеход OBD, показанный на фиг. 7A, входит на пешеходный переход до того, как транспортное средство V1 прибывает в следующее второе событие PB на перекрестке, когда скорость транспортного средства V1 уменьшается из-за действия вождения «Стоп» транспортного средства V1 в первом событии. То есть условие A обнаружения является условием для обнаружения объекта OB со временем до прибытия в течение предварительно определенного времени T1, но когда действием вождения транспортного средства V1 является «Стоп», условие B обнаружения устанавливается в состояние для обнаружение объекта OB со временем до прибытия в течение предварительно определенного времени T2 (>T1). Таким образом, условие обнаружения может быть установлено в соответствии с необходимостью наблюдения далеко, когда действием вождения является «Стоп».
[0108]
Объект OB с большим временем до прибытия может быть определен на основе того факта, что расстояние между вторым событием PB и объектом OB велико или скорость объекта OB мала. Процессор 11 задает условия обнаружения так, что второе условие обнаружения, касающееся второго события PB, когда действием вождения в первом событии PA является «Стоп», является условием обнаружения, в котором диапазон обнаружения для обнаружения объекта OB относительно широк по сравнению с со вторым условием обнаружения, относящимся ко второму событию PB, когда действием вождения в первом событии PA является «Ехать». Определение размера диапазона обнаружения является таким, как описано выше. В случае, когда длина диапазона обнаружения в направлении движения транспортного средства увеличивается при сравнении диапазонов обнаружения, диапазон обнаружения может превышать диапазоны обнаружения датчиков 260. В таком случае информация обнаружения объектов может быть получена от устройства обнаружения, предоставленного на стороне дороги, через устройство 30 связи.
Процессор 11 может задавать условия обнаружения так, чтобы второе условие обнаружения, касающееся второго события PB, когда действием вождения в первом событии PA является «Стоп», было условием обнаружения для извлечения объекта OB с относительно низкой скоростью приближения ко второму событию PB по сравнению со вторым условием обнаружения относительно второго события PB, когда действием вождения в первом событии PA является «Ехать».
[0109]
Чтобы получить условие обнаружения, при котором диапазон обнаружения для обнаружения объекта OB относительно широк, процессор 11 регулирует маршрут, по которому движется транспортное средство V1. Процессор 11 задает условия обнаружения так, что второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является остановка, является условием обнаружения, при котором траектория движения транспортного средства изменяется так, что диапазон обнаружения для обнаружения объекта вокруг транспортного средства является относительно широким по сравнению со вторым условием обнаружения относительно второго события, когда действием вождения в первом событии является движение. Процессор 11 изменяет траекторию движения, включая положения (положения в направлении ширины дороги/положения в направлении движения) на полосе движения, которая включена в общий первый маршрут к месту назначения. Регулировка траектории движения включает в себя настройку времени при прохождении через каждую точку, включенную в маршрут. Регулируя время при прохождении через каждую точку, включенную в маршрут, можно отрегулировать расстояние до находящегося впереди объекта. Одна или более кривизны маршрута после корректировки выполняются меньше предварительно определенной кривизны. Это связано с тем, что следует избегать управления вождением с большим количеством изменений рулевого управления.
[0110]
В процессе автономного вождения транспортного средства процессор 11 вычисляет оптимальную опорную траекторию движения (маршрут) в каждой полосе движения, включенной в маршрут к месту назначения. Опорная траектория движения (маршрут) относится к траектории, расположенной приблизительно в центре полосы движения, траектории, в которой включенные искривления не превышают заранее определенного значения, и/или траектории, в которой величины изменения включенных искривлений не превышают заранее определенное значение. Процессор 11 применяет опорную траекторию движения для перемещения транспортного средства в идеальной ситуации и применяет траекторию, которая получается путем изменения опорной траектории движения в ответ на обнаруженную реальную ситуацию, чтобы переместить транспортное средство.
[0111]
Диапазон обнаружения в процессе обнаружения может включать в себя слепую зону (окклюзия). Нельзя сказать, что такая слепая зона на практике является диапазоном обнаружения, потому что слепая зона не обнаруживается. Здесь область, исключая слепую зону, будет описана как диапазон обнаружения. Когда диапазон обнаружения включает в себя слепую зону, область слепой зоны должна быть сужена, чтобы расширить существенный диапазон обнаружения, и процессор 11 регулирует маршрут движения транспортного средства V1 так, чтобы уменьшить площадь области слепой зоны. В первом примере предшествующее транспортное средство затеняет диапазон обнаружения впереди на кривом участке маршрута, поэтому процессор 11 вычисляет траекторию движения, включающую положения, сдвинутые вправо и влево, чтобы избежать предшествующего транспортного средства в направлении ширины дороги, и управляет транспортным средством для передвижения по изменившейся траектории движения. Предпочтительно смещать траекторию движения наружу на кривом участке. Во втором примере, когда положение стоп-линии находится непосредственно под сигналом регулирования движения, рассматриваемое транспортное средство затеняет диапазон обнаружения, включая сигнал регулирования движения впереди, поэтому процессор 11 вычисляет траекторию движения, включающую в себя положения, сдвинутые от стоп-линии к стороне выше по потоку в направлении движения, и управляет транспортным средством для движения по измененной траектории движения. В третьем примере, когда предшествующее транспортное средство затеняет диапазон обнаружения впереди по прямой траектории, процессор 11 вычисляет измененную траекторию движения, включающую в себя положения, отстоящие от предшествующего транспортного средства на заранее определенное расстояние, и управляет транспортным средством для движения по траектории движения. В четвертом примере, когда предшествующее транспортное средство затеняет диапазон обнаружения впереди по прямой траектории, процессор 11 вычисляет траекторию движения, включающую в себя положения, в которых может быть распознана задняя часть предшествующего транспортного средства, и управляет транспортным средством, чтобы двигаться по измененной траектории движении. В результате может быть установлен диапазон обнаружения с уменьшенной окклюзией. Изменение траектории движения позволяет регулировать точку обзора (положение датчика или положение камеры) в условии обнаружения.
[0112]
Процессор 11 задает условия обнаружения так, что второе условие обнаружения, применяемое во втором событии, когда действие вождения в первом событии изменяется с «Стоп» на «Ехать», является условием обнаружения, в котором траектория движения транспортного средства изменяется так, что диапазон обнаружения для обнаружения объекта вокруг транспортного средства является относительно узким по сравнению со вторым условием обнаружения относительно второго события, когда действием вождения в первом событии является остановка. В этом случае траектория движения, измененная, когда определено, что действием вождения в первом событии является «Стоп», изменяется обратно на исходную траекторию. Например, траектория движения, в которой боковые положения изменяются для сужения области слепой зоны, изменяется на траекторию движения, в которой боковые положения изменяются обратно на исходные боковые положения (центральные положения).
[0113]
Таким образом, когда действием вождения в первом событии PA является «Стоп», объект OB, который находится дальше от второго события PB или имеет более длительное время до прибытия во второе событие PB, может быть выборочно обнаружен, чем когда действием вождения в первое событие PA является «Ехать». Когда действием вождения транспортного средства V1 в первом событии PA является «Стоп», время для транспортного средства V1, чтобы прибыть в первое событие PA, и время для транспортного средства V1, чтобы прибыть в второе событие PB, являются относительно длинными, чем значения, когда действием вождения в первом событии PA является «Ехать». В таком случае состояние объекта OB с большой вероятностью изменится до того, как транспортное средство V1 прибудет в первое событие PA или второе событие PB, и, таким образом, целесообразно широко контролировать объект OB, существующий в близком диапазоне, в котором расстояние до второго события PB меньше, чем второе предварительно определенное значение (> первое предварительно определенное значение) или время до прибытия во второе событие PB меньше, чем другое второе предварительно определенное значение (> другое первое предварительно определенное значение). Посредством переключения второго условия обнаружения на шаблон B объект определения может быть выполнен как объект OB, существующий в относительно отдаленном диапазоне, в котором расстояние до второго события PB является первым предварительно определенным значением или больше и меньше, чем второе предварительно определенное значение, или время до прибытия во второе событие PB является другим первым предварительно определенным значением или больше и меньше, чем другое второе предварительно определенное значение. Процессор 11 учитывает ситуацию, в которой время для прибытия транспортного средства V1 во второе событие PB становится относительно большим, и контролирует широкий диапазон, включая объект OB, который может перемещаться в течение этого времени. Во втором условии обнаружения шаблона B для второго события PB широко отслеживается объект OB в диапазоне, который был исключен в ранее установленном условии обнаружения. В результате может быть получена информация обнаружения в диапазоне, необходимом для сцены, в которой действием вождения является «Стоп».
[0114]
Когда действием вождения в первом событии PA является «Стоп», процессор 11 может задать второе условие обнаружения равным условию обнаружения, которое исключает диапазон обнаружения относительно второго события PB. Диапазон обнаружения относительно второго события PB относится к области в пределах предварительно определенного диапазона от контрольного положения второго события PB. Когда действием вождения в первом событии PA, с которым транспортное средство сталкивается ранее, является «Стоп», транспортное средство замедляется, поэтому содержание действия вождения во втором событии PB, с которым транспортное средство сталкивается следующим, не оказывает существенного влияния на план вождения. То есть важность информации обнаружения в диапазоне обнаружения, относящегося ко второму событию PB, является низкой. Когда действием возбуждения в первом событии PA является «Стоп», процессор 11 может сделать остановку в соответствии с действием вождения в первом событии PA без анализа информации обнаружения второго события PB. Время от замедления до остановки велико (по сравнению со временем обработки), поэтому ожидается следующий результат определения. Это управление может быть отменено, когда транспортное средство делает остановку, когда скорость транспортного средства становится меньше предварительно определенной скорости после замедления или когда транспортное средство приближается к первому событию PA менее чем на предварительно определенное расстояние.
Когда действием вождения в первом событии PA является «Стоп», информация обнаружения, касающаяся события B, с которым транспортное средство сталкивается следующим, не получается, и, следовательно, получение информации обнаружения, имеющей низкий уровень важности, может быть запрещено для уменьшения количества информации для обработки. В результате вычислительная нагрузка может быть уменьшена, а системные ресурсы могут использоваться эффективно.
[0115]
<Третий пример настройки>
Третий пример настройки будет описан со ссылкой на фиг. 8А и фиг. 8В. События PA, PB и PC, показанные на фиг. 8А и фиг. 8B - обычные события.
Фиг. 8A является схемой, иллюстрирующей действие вождения в момент времени T0, а фиг. 8B - схема, иллюстрирующая действие вождения в момент времени T1 после момента времени T0. Как показано на фиг. 8А транспортное средство V1 поворачивает направо на перекрестке. Как показано на рисунке, в событии PA, которое является пешеходным переходом, и событии PB, которое пересекает второй маршрут, определяется действие вождения «Ехать», поскольку не было обнаружено никаких объектов для контакта. Действие вождения «Стоп» определяется после правого поворота в событии PC до выхода из перекрестка, потому что транспортное средство приближается к другому транспортному средству OBC на заранее определенное расстояние или меньше в событии PC.
[0116]
Как показано на фиг. 8B, пешеход OBA входит на пешеходный переход в момент времени T1. Процессор 11 изменяет действие вождения в событии PA на «Стоп». Поскольку действие вождения в событии PA изменяется на «Стоп», транспортное средство V1 замедляется, поэтому время до прибытия в каждое из событий PA, PB, и PC увеличивается. В результате, действие вождения в событии PB переводится в «Стоп», потому что увеличивается вероятность контакта с объектом OBB в событии PB. Кроме того, действие вождения в событии PC устанавливается как «Ехать», потому что объект OBC проходит через событие PB до транспортного средства V1. Таким образом, изменение действия вождения в событии PA может привести к изменению действий вождения в событиях, следующих за событием PA.
[0117]
Процессор 11 определяет условия обнаружения так, что второе условие обнаружения относительно второго события PB, когда действием вождения в первом событии PA является «Стоп», является условием обнаружения шаблона B, в котором вероятность определения того, что объект OB вступает в контакт с транспортным средством V1 во втором событии PB, устанавливается высокой по сравнению со вторым условием обнаружения относительно второго события PB, когда действием вождения в первом событии PA является «Ехать». В зависимости от атрибута объекта OB (такого как транспортное средство, транспортное средство с двумя колесами или пешеход) степень свободы в направлении движения и изменение (значение диапазона) скорости движения различны. Когда действием вождения является «Стоп», процессор 11 задает высокую вероятность того, что направление движения объекта OB является направлением транспортного средства V1, и задает условие обнаружения таким образом, что вероятность того, что объект OB вступает в контакт с транспортным средством V1 вычисляется как высокая. Когда действием вождения является «Стоп», процессор 11 задает высокую вероятность того, что скорость движения объекта OB попадает в диапазон скоростей, в котором объект OB вступает в контакт с транспортным средством V1 в этом событии, и задает условие обнаружения таким образом, что вероятность того, что объект OB вступит в контакт с транспортным средством V1, вычисляется как высокая.
[0118]
Процессор 11 определяет условия обнаружения так, что второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является остановка, является условием обнаружения, в котором пороговое значение, применяемое в качестве условия обнаружения при обнаружении объекта OB, является низким по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение.
[0119]
Когда действием вождения в событии является «Стоп», вероятность того, что транспортное средство V1 и объект приблизятся друг к другу в этом событии, увеличивается, и поэтому интересующий объект может быть надлежащим образом обнаружен в соответствии с содержанием действия вождения в событии.
[0120]
<Четвертый пример настройки>
Четвертый пример настройки будет описан со ссылкой на фиг. 9А и фиг. 9В. События PA, PB и PC, показанные на фиг. 9А и фиг. 9B - обычные события.
Фиг. 9А - схема, иллюстрирующая действие вождения в момент времени T0, а фиг. 9B является схемой, иллюстрирующей действие вождения в момент времени T1 после момента времени T0. Как показано на фиг. 9А транспортное средство V1 поворачивает направо на перекрестке. Как показано на чертеже, в каждом из события PA, которое является пешеходным переходом, и события PB, которое пересекает второй маршрут, определяется действие вождения «Стоп», поскольку обнаружен объект для вступления в контакт. Действие вождения «Ехать» определяется после поворота направо в событии PC до выхода из перекрестка, поскольку другой автомобиль OBC проходит через событие PC до транспортного средства V1.
[0121]
Как показано на фиг. 9B, пешеход OBA отходит от пешеходного перехода в момент времени T1. Процессор 11 изменяет действие вождения в событии PA на «Ехать». Когда действие вождения в событии PA изменяется на «Ехать», транспортное средство V1 поддерживает текущую скорость или ускоряется, поэтому время до прибытия в каждое из событий PA, PB и PC уменьшаются. В результате объект OBB не прибывает в событие PB в момент времени, когда транспортное средство V1 прибывает в событие PB; следовательно, вероятность того, что объект OBB и транспортное средство V1 войдут в контакт друг с другом в событии PB, уменьшается, и действие вождения в событии PB переводится на «Ехать». С другой стороны, время до прибытия в событие PC также уменьшается, и транспортное средство V1 прибывает в PC в момент времени, когда объект OBC прибывает в событие PC; следовательно, вероятность того, что объект OBC и транспортное средство V1 вступят в контакт друг с другом в событии PC, увеличивается, и действие вождения в событии PC устанавливается на «Стоп». Таким образом, изменение действия вождения в событии PA может привести к изменению действий вождения после событий PA.
[0122]
Процессор 11 определяет условия обнаружения так, что второе условие обнаружения, касающееся второго события PB, когда действием вождения в первом событии PA является «Ехать», является условием обнаружения шаблона A, в котором вероятность определения того, что объект вступает в контакт с транспортным средством V1 во втором событии PB устанавливается низкой по сравнению со вторым условием обнаружения относительно второго события PB, когда действием вождения в первом событии PA является остановка. В зависимости от атрибута объекта OB (такого как транспортное средство, двухколесное транспортное средство или пешеход) степень свободы в направлении движения и изменение (значение диапазона) скорости движения различны. Когда действием вождения в первом событии PA является «Ехать», процессор 11 задаеь низкую вероятность того, что направление движения объекта OB является направлением транспортного средства V1, и задает условие обнаружения так, что вероятность того, что объект OB придет в контакт с транспортным средством V1 вычисляется как низкая. Когда действием вождения является «Ехать», процессор 11 задает низкую вероятность того, что скорость движения объекта OB попадает в диапазон скоростей, в котором объект OB вступает в контакт с транспортным средством V1 в этом событии, и задает условие обнаружения таким образом что вероятность того, что объект OB вступит в контакт с транспортным средством V1, вычисляется как низкая. Действием вождения в событии PA является «Ехать», и, следовательно, как описано выше, может быть установлено условие обнаружения, способное обнаруживать объект с коротким временем до прибытия в событие PA, например, путем сужения диапазона обнаружения.
[0123]
Процессор 11 определяет условия обнаружения так, что второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является движение, является условием обнаружения, при котором порог, применяемый в качестве условия обнаружения при обнаружении объекта OB, является высоким по сравнению со вторым условием обнаружения, касающимся второго события, когда действием вождения в первом событии является остановка.
[0124]
Когда действием вождения в событии является «Ехать», объект OB с низкой вероятностью сближения с транспортным средством V1 во втором событии также может рассматриваться как объект. Интересующий объект может быть надлежащим образом обнаружен в соответствии с содержанием действия вождения в событии.
[0125]
<Пятый пример настройки>
Пятый пример настройки будет описан со ссылкой на фиг. 10А и фиг. 10B. События PA, PB и PC, показанные на фиг. 10А и фиг. 10B - обычные события.
Фиг. 10A является схемой, иллюстрирующей диапазон RV1, в котором объект OB обнаруживается, когда скорость транспортного средства транспортного средства V1, которым нужно управлять, равна VS1 (< VS2), которая является относительно низкой скоростью, а Фиг. 10 является схемой, иллюстрирующей диапазон RV2, в котором объект OB обнаруживается когда скорость транспортного средства равна VS2 (> VS1). Диапазоны RV1 и RV2, как показано здесь, являются не диапазонами обнаружения датчиков 260, а диапазонами, в которых процессор 11 обнаруживает объект OB.
[0126]
Процессор 11 задает условие обнаружения для обнаружения объекта с более коротким временем до прибытия в событие, когда скорость транспортного средства V1 выше. Когда скорость транспортного средства V1 является относительно низкой, объект OB обнаруживается в широком диапазоне, как показано на фиг. 10А, для обнаружения объекта с относительно длительным временем до прибытия в событие. Когда скорость транспортного средства V1 является относительно высокой, объект OB обнаруживается в узком диапазоне, как показано на фиг. 10B, для обнаружения объекта с относительно более коротким временем до прибытия в событие, чем при относительно низкой скорости.
[0127]
Когда скорость транспортного средства V1 является относительно низкой, диапазон оценки скорости движения объекта задается широким (разброс скорости движения задается широким/степень дисперсии задается большой), чтобы определить возможность контакта с объектом. Задавая диапазон оценки скорости движения объекта широким, вероятность контакта с объектом вычисляется высокой. Посредством этой настройки во время низкой скорости также может учитываться возможность контакта с объектом, существующим в положении, удаленном от события.
[0128]
С другой стороны, когда скорость транспортного средства V1 является относительно высокой, диапазон оценки скорости движения объекта задается узким (дисперсия скорости движения задается узкой/степень дисперсии задается небольшой), чтобы определить возможность контакта с объектом. Посредством задания диапазона оценки скорости движения объекта узким, вероятность контакта с объектом вычисляется низкой. Благодаря этой настройке во время высокой скорости можно сфокусироваться на объекте, находящемся в положении, близком к событию, чтобы учитывать возможность контакта с объектом.
[0129]
На фиг. 10А и фиг. 10B, скорость транспортного средства V1 отличается. Положения и скорости объектов являются общими.
В примере, показанном на фиг. 10A, диапазон, в котором оценивается существование объекта OBC, указывается областью существования OBC-R1, диапазон, в котором оценивается существование объекта OBB, указывается областью существования OBB-R1, а диапазон, в котором оценивается существование объекта OBD, указывается областью существования OBD-R1. В примере, показанном на фиг. 10A области существования объектов OBC, OBB и OBD принадлежат диапазону RV1, поэтому объекты OBC, OBB и OBD обрабатываются как объекты.
В примере, показанном на фиг. 10B, диапазон, в котором оценивается существование объекта OBC, указывается областью существования OBC-R2, диапазон, в котором оценивается существование объекта OBB, указывается областью существования OBB-R2, и диапазон, в котором оценивается существование объекта OBD, указывается областью существования OBD-R2. Области существования, показанные на фиг. 10B, на которой скорость транспортного средства V1 является низкой, уже, чем области существования, показанные на фиг. 10А, на которой скорость транспортного средства является высокой. В примере, показанном на фиг. 10B, только область существования объекта OBD принадлежит диапазону RV2; следовательно, только объект OBD обрабатывается как объект, а объекты OBB и OBC не обрабатываются как объекты.
[0130]
Когда скорость транспортного средства увеличивается, объект с более коротким временем до прибытия в событие может быть выборочно обнаружен. Чем выше скорость транспортного средства, тем короче может быть время прибытия в событие. В одном или нескольких вариантах осуществления настоящего изобретения, когда скорость транспортного средства увеличивается, может быть обнаружен физический объект с более коротким временем прибытия в событие. Другими словами, можно исключить из объектов определения объект OB, существующий в дальнем диапазоне, в котором время до прибытия в событие не меньше предварительно определенного значения. Может быть предотвращено получение ненужной информации обнаружения при сохранении точности обнаружения для объекта OB. В результате вычислительная нагрузка может быть уменьшена, а системные ресурсы могут использоваться эффективно.
[0131]
Далее будет описана схема определения действия вождения.
После начала выполнения плана вождения, то есть во время выполнения инструкции управления вождением, процессор 11 контролирует переключение действия вождения в событии. Как описано выше, в схеме, использующей одномерную карту, действие вождения в предшествующем или последующем событии влияет на действие вождения в последующем или предшествующем событии. После начала выполнения плана последовательного вождения ситуация, на которой основан план вождения, может измениться из-за появления нового объекта (другого транспортного средства). Ситуация, касающаяся плана вождения, может измениться, и действие вождения в событии может быть изменено с действия в выполняемом плане вождения на другое действие вождения. Когда действие вождения в событии переключается с «Ехать» на «Стоп» или с «Стоп» на «Ехать», действие вождения в каждом из событий в плане вождения изменяется, и план вождения создается снова.
[0132]
Когда действие вождения в первом событии переключается во время выполнения инструкции управления вождением, процессор 11 отменяет действие вождения, определенное для второго события. Процессор 11 оценивает, что ситуация во втором событии, с которым транспортное средство сталкивается в следующий раз, изменится, потому что время для прибытия транспортного средства во второе событие изменяется из-за переключения действия вождения в первом событии, с которым транспортное средство сталкивается ранее. Процессор 11 отменяет содержание действия вождения во втором событии, используя переключение действия вождения в первом событии в качестве триггера, вместо просмотра действия вождения во втором событии после приближения ко второму событию. Другими словами, пробел (НЕИЗВЕСТНО) устанавливается временно вместо того, чтобы следовать действию вождения без каких-либо изменений во втором событии в выполняемом плане вождения. Процессор 11 переопределяет действие вождения на основе новой информации обнаружения. Это позволяет определять действие вождения с высокой степенью точности в соответствии с ситуацией. Задержка обработки может быть предотвращена, потому что переопределение выполняется на основе изменения действия вождения в первом событии, а не выполнения переопределения после приближения ко второму событию.
[0133]
Когда действие вождения в первом событии переключается во время выполнения инструкции управления вождением, процессор 11 определяет действие вождения во втором событии на основе предварительно определенного правила. Как описано выше, действие вождения может быть временно приостановлено, но правило может быть предварительно определено. Предварительно определив правило для изменения, можно быстро отреагировать на изменение действия вождения в первом событии. Действие вождения во втором событии определяется быстро; следовательно, ступенчатые изменения величины изменения скорости, величины изменения ускорения, величины изменения рулевого управления, величины изменения скорости рулевого управления и т.п. могут быть уменьшены, чтобы реализовать плавное автономное вождение, и может быть предотвращено чувство дискомфорта, присущее пассажирам.
[0134]
Примеры определения действия вождения будут описаны ниже.
<Первый пример определения>
Во время выполнения плана вождения, в котором действием вождения в первом событии является «Ехать», когда действие вождения в первом событии изменяется с «Ехать» на «Стоп», действие вождения во втором событии устанавливается на «Стоп».
Если действие вождения во втором событии переводится в «Ехать», когда действие вождения в первом событии изменяется с «Ехать» на «Стоп», план вождения изменится с «Стоп» на «Ехать» и пошаговые изменения в скорости могут возникать из-за ускоряющего вождения от замедления. Кроме того, когда действие вождения в первом событии переводится в «Стоп», время до прибытия в первое событие становится длительным, и действие вождения во втором событии также может переходить в «Стоп» из-за изменения в ситуация. В этом случае замедление и ускорение будут повторяться в порядке «Стоп», «Ехать» и «Стоп», и пассажиры могут быть вынуждены испытывать некомфортное вождение. В этом примере действие вождения в первом событии, переходящее в «Стоп», запускает установку действия вождения во втором событии также в «Стоп», так что возникновение такой проблемы может быть предотвращено.
[0135]
Первый пример определения будет описан со ссылкой на фиг. 11А и фиг. 11В. События PA, PB и PC, показанные на фиг. 11А и фиг. 11B - обычные события. Процессор 11 вычисляет действие вождения для каждого из событий PA, PB и ПК.
[0136]
В этом примере, когда действия вождения в первом событии и во втором событии имеют значение «Ехать», и действие вождения в первом событии изменяется на «Стоп», действие вождения во втором событии изменяется с «Ехать» на «Стоп».
Как показано на фиг. 11A, в момент времени T0 действием вождения в событии PA является «Ехать», действием вождения в событии PB является «Ехать», и действием вождения в событии PC является «Ехать». Однако в момент T1 времени пешеход M1 входит на пешеходный переход как событие A. Сначала действие вождения в событии A устанавливается на «Стоп: Не Ехать» из-за наличия пешехода M1. Транспортное средство замедляется в соответствии с инструкцией по остановке, и поэтому время для прибытия транспортного средства в событие A становится большим. В таком случае действие вождения в событии B устанавливается на «Стоп: Не Ехать». В этом примере действие вождения в событии C также устанавливается на «Стоп: Не ехать».
[0137]
Когда транспортное средство проходит через первое событие, до другого транспортного средства, или когда другое транспортное средство проходит через первое событие до упомянутого транспортного средства, действие вождения в этом событии устанавливается на «Ехать».
Когда определено, что транспортное средство проходит через первое событие до другого транспортного средства, и действие вождения устанавливается на «Ехать», действие вождения может быть изменено с «Ехать» на «Стоп», когда ситуация меняется. Из-за замедления время прибытия транспортного средства в первое событие увеличивается. В такой ситуации необходимо проанализировать, что в первом событии вероятность контакта с другим транспортным средством, которое было определено как не вступающее в контакт с транспортным средством в соответствии с предыдущим определением, становится высокой. В этом примере действие вождения во втором событии устанавливается на «Стоп», чтобы подготовиться к другому транспортному средству, приближающемуся к упомянутому транспортному средству. Такая подготовка позволяет достичь безопасного автономного вождения.
В дополнение или в качестве альтернативы, когда определено, что другое транспортное средство проходит через первое событие до упомянутого транспортного средства, и действие вождения устанавливается на «Ехать», действие вождения может быть изменено с «Ехать» на «Стоп», поскольку ситуация меняется. Из-за замедления время прибытия автомобиля в первое событие увеличивается. В такой ситуации необходимо рассмотреть возникновение еще одного транспортного средства и контакт с еще одним транспортным средством, а не другое транспортное средство, которое прошло через первое событие в соответствии с предыдущим определением. В этом примере действие вождения во втором событии устанавливается на «Стоп», чтобы подготовиться к тому, что еще одно транспортное средство приближается к упомянутому транспортному средству. Такая подготовка позволяет достичь безопасного автономного вождения.
[0138]
В дополнение или в качестве альтернативы, когда информация обнаружения, относящаяся к событию B и событию C, не может быть получена из-за отсутствия диапазонов датчиков, действие вождения в каждом из события B и события C также устанавливается на «Стоп: Не ехать». Затем, когда обнаружение становится возможным и информация обнаружения получена, определяется действие вождения.
[0139]
<Второй пример определения>
Во время выполнения плана вождения, в котором действием вождения в первом событии является остановка, когда действие вождения в первом событии изменяется с «Стоп» на «Ехать», действие вождения во втором событии устанавливается на «Стоп».
Когда действие вождения в первом событии изменяется с «Стоп» на «Ехать», если действие вождения во втором событии устанавливается на «Ехать», последовательные инструкции «Ехать» приведут к большому ускорению после замедления, которое может дать неудобное чувство пассажирам. Установив действие движения во втором событии на «Стоп», даже когда действие вождения в первом событии меняется на «Ехать», планируется умеренное ускорение с учетом последующего «Стопа». Таким образом, быстрое ускорение может быть подавлено для достижения плавного вождения без ступенчатых изменений скорости. Кроме того, время до прибытия в первое событие может быть длительным, потому что действие вождения в первом событии было установлено на «Стоп» один раз. Установив действие движения во втором событии на «Стоп», чтобы подготовиться к возможности изменения ситуации, можно сделать соответствующее определение, даже когда ситуация меняется. В этом примере действие вождения в первом событии, устанавливающееся на «Стоп», запускает установку действия вождения во втором событии на «Стоп», и, таким образом, может быть достигнуто безопасное вождение с подавленными ступенчатыми изменениями скорости.
[0140]
В случае, когда действие вождения изменяется с остановки на движение в первом событии, когда величина перемещения объекта, обнаруженного в первом событии, меньше предварительно определенной величины, предпочтительно устанавливать действие вождения во втором событии на «Ехать». Как описано выше, в принципе, действие вождения во втором событии устанавливается на «Стоп», но когда величина движения (скорость, ускорение) объекта, такого как другое транспортное средство, меньше предварительно определенной величины, его движение можно определить маленьким. В таком случае предпочтительно перемещать транспортное средство, чтобы пройти через второе событие. Вождение для выполнения остановки даже с небольшим движением объекта, дает неудобное чувство пользователю, который подтвердил ситуацию. В этом примере, только когда движение объекта невелико, действие вождения во втором событии устанавливается на «Ехать», и тем самым может быть достигнуто плавное автономное движение.
[0141]
Первый пример определения будет описан со ссылкой на фиг. 12А и фиг. 12B. События PA, PB и PC, показанные на фиг. 12А и фиг. 12B - общие события. Процессор 11 вычисляет действие вождения для каждого из событий PA, PB и ПК. Как показано на фиг. 11A, в момент времени T0 пешеход M1 существует на пешеходном переходе в качестве события A, поэтому действием вождения в событии PA является «Стоп: Не Ехать». Действия вождения в последующих событиях B и C также устанавливаются на «Стоп: Не Ехать», потому что действием вождения в предшествующем событии PA является «Стоп: Не ехать».
[0142]
В момент времени T1 пешеход M1 покинул пешеходный переход в качестве события A, поэтому действие вождения в событии PA изменяется на «Ехать». В это время, когда действие вождения в событии PA изменяется с остановки на движение, процессор 11 устанавливает действия вождения в событиях B и C на «Стоп: Не Ехать». Когда действие вождения в событии PA изменяется с «Стоп» на «Ехать», автомобиль ускоряется, чтобы двигаться к событию PA. Здесь действия вождения в событиях B и C установлены на «Стоп: Не Ехать» для подавления ускорения транспортного средства, и, таким образом, обеспечивается время для прибытия транспортного средства в событию A. Информация обнаружения в событиях B и C собирается и анализируется для обнаружения объекта и вычисления времени прибытия объекта в каждое из событий B и C. Время прибытия объекта в каждое из событий B и C сравнивается со временем для транспортного средства в качестве цели управления для достижения каждого из событий B и C, чтобы определить возможность контакта в каждом из событий B и C. Когда разница во времени меньше предварительно определенного значения, действие вождения устанавливается на «Стоп: Не Ехать», в то время как, когда разница во времени не меньше, чем предварительно определенное значение, действие вождения устанавливается на «Ехать».
[0143]
Если действие вождения изменяется после начала выполнения плана вождения, план вождения создается на основе измененного действия вождения в событии. Процесс создания плана движения повторяется в заранее определенном цикле. Транспортное средство движется, и ситуация меняется от момента к моменту, поэтому обнаружение и анализ объекта и определение действия вождения повторяются на основе новой информации обнаружения, результата обнаружения нового объекта и т.п. Когда действие вождения изменяется, новый план вождения создается на основе измененного действия вождения. Это позволяет создать план вождения, в котором определяется действие вождения, оптимальное для текущей ситуации. Во вновь созданном плане вождения определяется действие вождения, основанное на новом результате обнаружения/определения, и, следовательно, оно не доставляет некомфортного ощущения пользователю, который подтвердил ситуацию.
[0144]
Фиг. 13 иллюстрирует пример процесса определения действия вождения (фиг. 3, этап S16).
На этапе S31 процессор 11 определяет, было ли изменено действие вождения в первом событии. На этапе S32 процессор 11 дополнительно определяет, было ли изменено действие вождения в первом событии с «Ехать» на «Стоп». За положительным определением следует этап S33, на котором процессор 11 подтверждает, действительно ли действием вождения во втором событии является «Ехать». За подтверждением «Ехать» следует этап S34, на котором процессор 11 изменяет действие движения во втором событии на «Стоп».
[0145]
После этого на этапе S35 процессор 11 определяет, было ли изменено действие вождения в первом событии с «Стоп» на «Ехать». Процессор 11 сохраняет действие вождения «Стоп» во втором событии, даже когда действие вождения в первом событии устанавливается на «Ехать». Однако на этапе S37, только когда процессор 11 подтверждает, что обнаруженная величина перемещения объекта меньше предварительно определенной величины, и объект является физическим объектом с небольшим движением, обработка переходит на этап S38, на котором процессор 11 изменяет действие вождения во втором событии на «Ехать». Когда величина перемещения объекта не меньше, чем предварительно определенная величина, процесс переходит на этап S39, на котором процессор 11 сохраняет действие вождения «Стоп» во втором событии.
[0146]
Обращаясь снова к блок-схеме последовательности операций на фиг. 3, когда определяется действие вождения для события, извлеченного снова после изменения условия обнаружения, процесс переходит к этапу S16, на котором создается план вождения. План вождения, подходящий для ситуации, которая меняется от момента к моменту, выполняется.
[0147]
На последующем этапе S17 управление вождением выполняется на основе созданного плана вождения. Процессор 11 управляет транспортным средством для выполнения плана вождения посредством контроллера 210 транспортного средства.
[0148]
Процессор 11 вычисляет целевое значение управления на основе фактического значения координаты X (ось X является направлением ширины транспортного средства) рассматриваемого транспортного средства V1, целевого значения координаты X, соответствующего текущему положению, и усиления обратной связи Целевое значение управления относится к углу рулевого управления, угловой скорости рулевого управления и другим параметрам, необходимым для перемещения транспортного средства V1 на целевом значении X-координаты. Процессор 11 выводит целевое значение управления на бортовое оборудование 200. Транспортное средство V1 движется по целевому маршруту, который определяется целевым поперечным положением. Процессор 11 вычисляет целевое значение Y-координаты (ось Y является направлением движения транспортного средства) по маршруту. Процессор 11 сравнивает текущее значение Y-координаты и скорость и ускорение транспортного средства в текущем положении транспортного средства V1 с целевым значением Y-координаты, соответствующим текущему значению Y-координаты, и скоростью и ускорением транспортного средства в целевом значении Y-координаты и вычисляет усиление обратной связи для значения Y-координаты на основе результатов сравнения. Процессор 11 вычисляет целевое значение управления для значения Y-координаты на основе скорости, ускорения и замедления транспортного средства, соответствующих целевому значению Y-координаты и усилению обратной связи для значения Y-координаты.
[0149]
Здесь целевое значение управления в направлении оси Y относится к значению управления для каждой из операций приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и может дополнительно включать в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операцию торможения для достижения ускорения, замедления и скорости транспортного средства, соответствующих целевому значению Y-координаты. Например, в автомобиле с двигателем функция управления служит для расчета целевого количества всасываемого воздуха (целевая степень открытия дроссельной заслонки) и целевого количества впрыска топлива на основе значений текущего и целевого ускорения, замедления, и скорости транспортного средства и отправляют их на устройство 270 привода. В качестве альтернативы, функция управления может служить для расчета ускорения, замедления и скорости транспортного средства и отправлять их контроллеру 210 транспортного средства, который может вычислять значение управления для каждой операции приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электромотора в случае электромобиля и может дополнительно включать в себя распределение крутящего момента для двигателя внутреннего сгорания и электромотора в случае гибридного автомобиля) и операции торможения для достижения этих ускорения, замедления и скорости транспортного средства.
[0150]
Процессор 11 выводит вычисленное целевое значение управления в направлении оси Y на бортовое оборудование 200. Контроллер 210 транспортного средства выполняет управление рулевым управлением и управление вождением, чтобы управлять рассматриваемым транспортным средством для движения по целевому маршруту, который определяется целевым значением X-координаты и целевым значением Y-координаты. Процесс повторяется каждый раз, когда получается целевое значение Y-координаты, и управляющее значение для каждого из полученных целевых значений X-координаты выводится на бортовое оборудование 200. На этапе S18 контроллер 210 транспортного средства выполняет инструкцию управления вождением в соответствии с командой от процессора 11, пока транспортное средство не прибудет в пункт назначения.
[0151]
Оборудование 100 управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения сконфигурировано и работает, как указано выше, и, следовательно, имеет следующие эффекты.
[0152]
(1) Способ управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения представляет собой способ, который включает в себя последовательное извлечение событий, с которыми сталкивается транспортное средство, на основе информации обнаружения, полученной в соответствии с условием обнаружения; размещение извлеченных событий в порядке встреч с транспортным средством; определение действия вождения на основе информации обнаружения, полученной в событиях; создание плана вождения, в котором упомянутое определенное действие вождения определяется для каждого из событий; и управление транспортным средством для выполнения инструкции управления вождением в соответствии с планом вождения. На основе содержания действия вождения, определенного для первого события, с которым транспортное средство сталкивается ранее, определяется второе условие обнаружения, касающееся по меньшей мере одного второго события, с которым транспортное средство сталкивается после первого события.
Подходящие условия обнаружения могут быть заданы путем определения второго условия обнаружения относительно второго события на основе содержания действия вождения в первом событии. Во время выполнения управления вождением изменяется движение управляемого транспортного средства, а также меняется ситуация вокруг. Установив каждое условие обнаружения в соответствии с действием вождения, можно точно воспринимать объекты, которые должны быть обнаружены, во время управления вождением и изменения ситуации объектов. В новых условиях обнаружения второе условие обнаружения для второго события задается на основе действия вождения в предшествующем первом событии, и, следовательно, возможно получить условие обнаружения в соответствии с изменением в предшествующей ситуации и быстро отразить условие обнаружения в последующем процессе обнаружения. Это позволяет получать информацию, необходимую для ситуации.
Соответствующее содержимое информации обнаружения может быть получено для выполнения процесса обнаружения и тому подобного для объектов на основе информации обнаружения с соответствующим количеством информации, потому что применяются условия обнаружения, соответствующие действиям вождения, а не применяются единые условия обнаружения. Другими словами, можно подавлять получение информации обнаружения с чрезмерным количеством информации и выполнять процесс обнаружения и тому подобное для объектов на основе информации обнаружения с минимальным количеством информации. Задание соответствующих условий обнаружения, которые определяют соответствующее содержимое и диапазоны обнаружения, позволяет эффективно использовать системные ресурсы.
[0153]
(2) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является «Ехать», является условием обнаружения для обнаружения объекта с относительно коротким время до прибытия в событие по сравнению со вторым условием обнаружения, касающимся второго события, когда действием вождения в первом событии является «Стоп».
Целесообразно интенсивно контролировать объект OB, существующий в близком диапазоне, в котором расстояние до второго события меньше, чем первое предварительно определенное значение, или время до прибытия в событие PA меньше, чем предварительно определенное значение. Посредством переключения второго условия обнаружения можно исключить из объектов определения объект OB, существующий в дальнем диапазоне, в котором расстояние до второго события не меньше, чем предварительно определенное значение, и время до прибытия во второе событие составляет не менее заданного значения. Может быть предотвращено получение ненужной информации обнаружения при сохранении точности обнаружения для объекта OB. В результате вычислительная нагрузка может быть уменьшена, а системные ресурсы могут использоваться эффективно.
[0154]
(3) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, относящееся ко второму событию, когда действием вождения в первом событии является «Стоп», является условием обнаружения для обнаружения объекта с относительно долгим временем до прибытия в событие по сравнению со вторым условием обнаружения, касающимся второго события, когда действием вождения в первом событии является «Ехать».
Состояние объекта OB с большой вероятностью изменится до того, как транспортное средство V1 достигнет второго события, и поэтому целесообразно широко контролировать объект OB, существующий в близком диапазоне, в котором расстояние до второго события меньше, чем второе предварительно определенное значение (> первое предварительно определенное значение) или время до прибытия в событие PA меньше, чем другое второе предварительно определенное значение (> другое первое предварительно определенное значение). Посредством переключения второго условия обнаружения объект определения может быть выполнен в виде объекта OB, существующего в относительно отдаленном диапазоне, в котором расстояние до второго события является первым предварительно определенным значением или больше и меньше, чем второе предварительно определенное значение, или время до прибытия во второе событие является другим первым предварительно определенным значением или больше и меньше, чем другое второе предварительно определенное значение. Процессор 11 учитывает ситуацию, в которой время для прибытия транспортного средства V1 во второе событие становится относительно большим, и контролирует широкий диапазон, включая объект OB, который может перемещаться в течение этого времени. В результате может быть получена информация обнаружения в диапазоне, необходимом для сцены, в которой действием вождения является «Стоп».
[0155]
(4) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, относящееся ко второму событию, когда действием вождения в первом событии является «Стоп», является условием обнаружения, в котором траектория движения транспортного средства изменяется таким образом, что диапазон обнаружения для обнаружения объекта является относительно широким по сравнению со вторым условием обнаружения относительно второго события, когда действием вождения в первом событии является «Ехать».
Состояние объекта OB с большой вероятностью изменится до того, как транспортное средство V1 достигнет второго события, и поэтому целесообразно широко контролировать объект OB, существующий в близком диапазоне, в котором расстояние до второго события меньше, чем второе предварительно определенное значение (> первое предварительно определенное значение) или время до прибытия во второе событие меньше, чем другое второе предварительно определенное значение (> другое первое предварительно определенное значение). Посредством переключения второго условия обнаружения объект определения может быть выполнен в виде объекта OB, существующего в относительно отдаленном диапазоне, в котором расстояние до второго события является первым предварительно определенным значением или больше и меньше, чем второе предварительно определенное значение, или время до прибытия в случае PA является другим первым предварительно определенным значением или больше и меньше, чем другое второе предварительно определенное значение. Процессор 11 учитывает ситуацию, в которой время для прибытия транспортного средства V1 во второе событие становится относительно большим, и контролирует широкий диапазон, включая объект OB, который может перемещаться в течение этого времени. В результате может быть получена информация обнаружения в диапазоне, необходимом для сцены, в которой действием вождения является «Стоп».
[0156]
(5) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является «Ехать», является условием обнаружения, в котором траектория маршрута транспортного средства изменяется таким образом, что диапазон обнаружения для обнаружения объекта является относительно узким по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является «Стоп».
Целесообразно интенсивно отслеживать объект OB, существующий в близком диапазоне, в котором расстояние до второго события меньше, чем первое предварительно определенное значение, или время до прибытия во второе событие меньше, чем первое заранее определенное значение. Посредством переключения второго условия обнаружения можно исключить из объектов определения объект OB, существующий в дальнем диапазоне, в котором расстояние до второго события не меньше, чем предварительно определенное значение, и время до прибытия во второе событие составляет не менее предварительно определенного значения. Может быть предотвращено получение ненужной информации обнаружения при сохранении точности обнаружения для объекта OB. В результате вычислительная нагрузка может быть уменьшена, а системные ресурсы могут использоваться эффективно.
[0157]
(6) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, касающееся второго события, когда действием вождения в первом событии является движение, является условием обнаружения, в котором вероятность определения того, что объект вступает в контакт с транспортным средством, является низкой по сравнению со вторым условием обнаружения относительно второго события, когда действием вождения в первом событии является остановка. Другими словами, даже когда ситуация объекта одинакова, второе условие обнаружения, касающееся второго события, в случае, когда действием вождения в первом событии является движение, приводит к результату обнаружения, что вероятность того, что объект вступает в контакт с транспортным средством, является относительно низкой.
Когда действием вождения в первом событии является «Ехать», учитывается объект OB с уменьшенной возможностью сближения с транспортным средством V1 во втором событии, которое транспортное средство V1 встречает следующим. Интересующий объект может быть надлежащим образом обнаружен в соответствии с содержанием действия вождения в событии.
[0158]
(7) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения второе условие обнаружения, относящееся ко второму событию, когда действием вождения в первом событии является остановка, является условием обнаружения, в котором вероятность определения того, что объект вступает в контакт с транспортным средством, является высокой по сравнению со вторым условием обнаружения относительно второго события PB, когда действием вождения в первом событии является движение. Другими словами, даже когда ситуация объекта одинакова, второе условие обнаружения относительно второго события в случае, когда действием вождения в первом событии является остановка, приводит к результату обнаружения, что вероятность того, что объект вступает в контакт с транспортным средством, является относительно высокой.
Когда действием вождения в первом событии является «Стоп», вероятность сближения с транспортным средством V1 во втором событии увеличивается, чтобы принять во внимание объект OB, существующий в диапазоне. Интересующий объект может быть надлежащим образом обнаружен в соответствии с содержанием действия вождения в событии.
[0159]
(8) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действием вождения в первом событии является движение, второе условие обнаружения устанавливается в условие обнаружения, которое включает в себя диапазон обнаружения относительно второго события. Когда первым событием является "Ехать", предполагается, что время до прибытия во второе событие, которое будет встречаться дальше, является коротким. Спровоцированный первым событием PA "Ехать", диапазон обнаружения второго состояния обнаружения выполняется так, чтобы включить диапазон обнаружения в отношении второго события, тем самым позволяя быстро получать необходимую информацию обнаружения вокруг второго события PB. Точность плана вождения может быть сохранена, поскольку информация обнаружения, подходящая для плана вождения, может быть получена в соответствующее время.
[0160]
(9) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действием вождения в первом событии является остановка, второе условие обнаружения устанавливается в условие обнаружения, которое исключает диапазон обнаружения в отношении второго события. Когда действием вождения в первом событии PA, с которым транспортное средство сталкивается ранее, является "Стоп", транспортное средство замедляется, так что процессор 11 может выполнить остановку в соответствии с действием вождения в первом событии PA без анализа информации обнаружения второго события PB. Когда действием вождения в первом событии PA является "Стоп", информация обнаружения относительно события B, с которым транспортное средство сталкивается дальше, не получается и, следовательно, получение информации обнаружения, имеющей низкий уровень важности, может быть запрещено, чтобы уменьшить объем информации, подлежащей обработке. В результате, вычислительная нагрузка может быть уменьшена и системные ресурсы могут быть использованы эффективно.
[0161]
(10) В способе управления вождением в соответствии с одним или несколькими вариантами осуществдения настоящего изобретения, условие обнаружения является условием для обнаружения объекта с более коротким временем до прибытия в событие по мере увеличения скорости транспортного средства. По мере увеличения скорости транспортного средства объект с более коротким временем до прибытия в событие может быть выборочно обнаружен. Чем выше скорость транспортного средства, тем короче может быть время до прибытия в событие. В одном или нескольких вариантах осуществления настоящего изобретения, по мере увеличения скорости транспортного средства, может быть обнаружен физический объект с более коротким временем до прибытия в событие. Другими словами, из объектов определения можно исключить объект OB, существующий в дальнем диапазоне, в котором время до прибытия в событие не меньше заранее определенного значения. Получение ненужной информация обнаружения может быть предотвращено при сохранении точности обнаружения объекта OB. В результате, вычислительная нагрузка может быть уменьшена и системные ресурсы могут быть использованы эффективно.
[0162]
(11) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения выполняется определение того, следует ли переключить первое условие обнаружения, применяемое ранее, на второе условие обнаружения, на основе величины изменения движения объекта, полученной из изменения во времени информации обнаружения.
Когда величина изменения движения объекта меньше, чем заранее определенное значение, вероятность того, что определение действие вождения изменено, является низкой. Если определение действия вождения не изменено, задание условия обнаружения, скорее всего, будет сохранено. Это позволяет правильно определить изменение/поддержание условия обнаружения и, таким образом, можно выполнить управление вождением, пригодное для реальной ситуации. Это может подавить некомфортное чувство, передаваемое пассажирам из-за частых изменений условия обнаружения.
[0163]
(12) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, второе условие обнаружения задается в момент, когда действие вождения в первом случае переключается с остановки на движение. Когда первым событием является остановка, фиксируется, что время до прибытия в следующее второе событие является коротким; поэтому, применяя второе условие обнаружения в это время, состояние обнаружения, подходящее для ситуации, может быть применено в фиксированный момент времени. Соответствующее условие обнаружения задается в соответствующее время, и поэтому можно получить только необходимую информацию и не получать ненужную информацию. Это может снизить вычислительную нагрузку при автономном вождении при прохождении через сцену, включающую события.
[0164]
(13) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действие вождения в первом событии переключается во время выполнения плана вождения, действие вождения, определенное для второго события, отменяется. Процессор 11 оценивает, что ситуация во втором событии, с которым транспортное средство сталкивается далее, изменится, потому что время для прибытия транспортного средства во второе событие изменяется из-за переключения действия вождения в первом событии, с которым транспортное средство сталкивается ранее. Процессор 11 отменяет содержание действия вождения во втором событии, используя переключение действия вождения в первом событии в качестве триггера, вместо пересмотра действия вождения во втором событии после приближения ко второму событию. Это позволяет определять действие вождения с высокой степенью точности в соответствии с ситуацией. Задержка обработки может быть предотвращена, потому что переопределение выполняется на основе изменения действия вождения в первом событии, а не выполнения переопределения после приближения ко второму событию.
[0165]
(14) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действие вождения в первом событии переключается во время выполнения плана вождения, действие вождения во втором событии определяется на основе предопределенного правила. Предварительно определив правило для изменения, можно быстро отреагировать на изменение действия вождения в первом событии. Действие вождения во втором событии определяется быстро; следовательно, ступенчатые изменения величины изменения скорости, величины изменения ускорения, величины изменения рулевого управления, величины изменения скорости рулевого управления и т.п. могут быть уменьшены, чтобы реализовать плавное автономное вождение, и может быть предотвращено чувство дискомфорта, присущее пассажирам.
[0166]
(15) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действие вождения в первом событии изменяется от движения к остановке во время выполнения плана вождения, в котором действием вождения в первом событии является движение, действие вождения во втором событии изменяется на остановку. Если действие вождения во втором событии устанавливается на «Ехать», когда действие вождения в первом событии изменяется с «Ехать» на «Стоп», план вождения изменится с «Стоп» на «Ехать» и ступенчатые изменения в скорости могут возникать из-за ускоряющего вождения от замедления. Кроме того, когда действие вождения в первом событии устанавливается на «Стоп», время до прибытия в первое событие становится длительным, и действие вождения во втором событии также может устанавливаться на «Стоп» из-за изменения в ситуация. В этом случае замедление и ускорение будут повторяться в порядке «Стоп», «Ехать» и «Стоп», и пассажиры могут быть вынуждены испытывать некомфортное вождение. В этом примере действие вождения в первом событии, устанавливающееся на «Стоп», запускает установку действия вождения во втором событии также на «Стоп», так что возникновение такой проблемы может быть предотвращено.
[0167]
(16) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действие вождения в первом событии изменяется с остановки на движение, действие вождения во втором событии устанавливается на остановку. Когда действие вождения в первом событии изменяется с «Стоп» на «Ехать», если действие вождения во втором событии устанавливается на «Ехать», последовательные инструкции «Ехать» приведут к большому ускорению после замедления, которое может придать некомфортное чувство пассажирам. Установив действие вождения во втором событии на «Стоп», даже когда действие вождения в первом событии меняется на «Ехать», планируется умеренное ускорение с учетом последующего «Стоп». Таким образом, быстрое ускорение может быть подавлено для достижения плавного вождения без ступенчатых изменений скорости. Кроме того, время до прибытия в первое событие может быть длительным, потому что действие вождения в первом событии было установлено на «Стоп» один раз. Установив действие вождения во втором событии на «Стоп», чтобы подготовиться к возможности изменения ситуации, можно сделать соответствующее определение, даже когда ситуация меняется. В этом примере действие вождения в первом событии, устанавливающееся на «Стоп», запускает установку действия вождения во втором событии на «Стоп», и, таким образом, безопасное вождение может быть достигнуто с подавленными ступенчатыми изменениями скорости.
[0168]
(17) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда величина перемещения объекта, обнаруженного в первом событии, меньше, чем предварительно определенная величина, действие вождения во втором событии устанавливается на движение. Как описано выше, в принципе, действие вождения во втором событии устанавливается на «Стоп», но когда величина перемещения (скорость, ускорение) объекта, такого как другое транспортное средство, меньше предварительно определенной величины, его движение может быть определено небольшим. Вождение, чтобы сделать остановку даже с небольшим движением объекта, придает некомфортное чувство пользователю, который подтвердил ситуацию. В этом примере, только когда движение объекта невелико, действие вождения во втором событии устанавливается на «Ехать», и тем самым может быть достигнуто плавное автономное движение.
[0169]
(18) В способе управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения, когда действие вождения изменяется, план вождения создается на основе измененного действия вождения в событиях. Процесс создания плана вождения повторяется в заранее определенном цикле. Транспортное средство движется, и ситуация меняется от момента к моменту, поэтому обнаружение и анализ объекта и определение действия вождения повторяются на основе новой информации обнаружения, результата обнаружения нового объекта и т.п. Когда действие вождения изменяется, новый план вождения создается на основе измененного действия вождения. Это позволяет создать план вождения, в котором определяется действие вождения, оптимальное для текущей ситуации. Во вновь созданном плане вождения определяется действие вождения, основанное на новом результате обнаружения/определения, и, следовательно, оно не доставляет некомфортного ощущения пользователю, который подтвердил ситуацию.
[0170]
(19) Оборудование 100 управления вождением в соответствии с одним или несколькими вариантами осуществления настоящего изобретения демонстрирует те же действия и эффекты, что и вышеописанный способ управления вождением.
[0171]
Варианты осуществления, поясненные выше, описаны для облегчения понимания настоящего изобретения и не описаны для ограничения настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений настоящего изобретения.
[Описание позиционных обозначений]
[0172]
1 Система управления вождением
100 Оборудование управления вождением
10 Устройство управления
11 Процессор
20 Устройство вывода
30 Устройство связи
200 Бортовое оборудование
210 Контроллер транспортного средства
220 Навигационное устройство
221 Устройство обнаружения положения
222 Картографическая информация
223 Дорожная информация
224 Информация о правилах дорожного движения
230 Устройство обнаружения
231 Камера
232 Радарное устройство
240 Устройство удержания на полосе движения
241 Камера
242 Дорожная информация
250 Устройство вывода
251 Дисплей
252 Динамик
260 Датчики
261 Датчик угла поворота рулевого колеса
262 Датчик скорости транспортного средства
263 Датчик пространственного положения
270 Устройство привода
271 Тормозное устройство
280 Устройство рулевого управления.


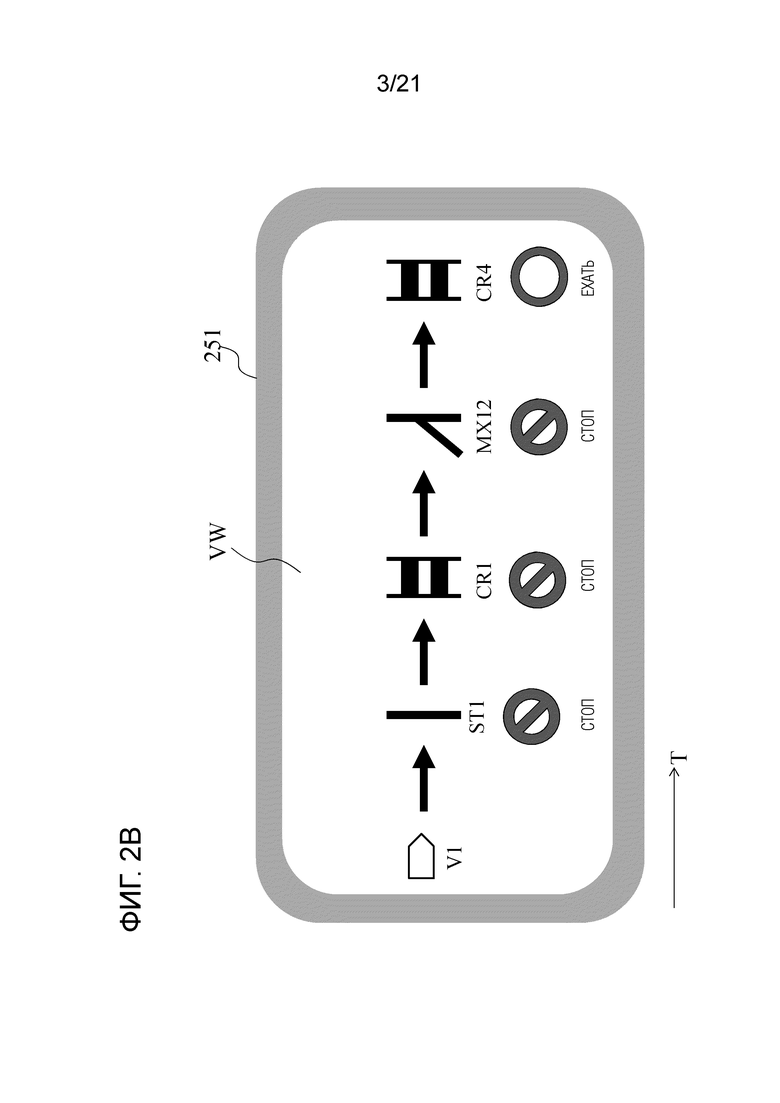









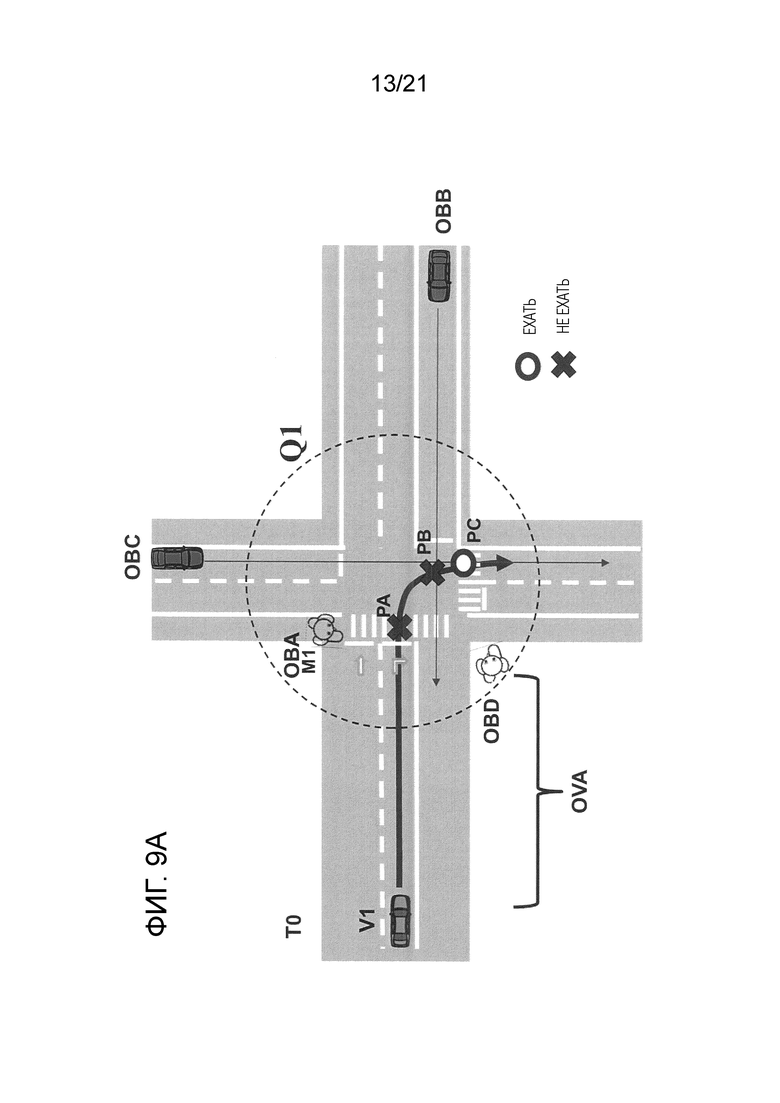








Изобретение относится к способу и оборудованию управления вождением. Способ управления вождением содержит этапы, на которых получают информацию обнаружения вокруг транспортного средства на основе условия обнаружения, которое может быть задано для каждой точки, извлекают события, с которыми встречается транспортное средство, на основе информации обнаружения, размещают извлеченные события в порядке встреч с транспортным средством, создают план последовательного вождения и определяют на основе содержания действия вождения, определенного для первого события, с которым транспортное средство встречается ранее, второе условие обнаружения, относящееся по меньшей мере к одному второму событию, с которым транспортное средство встречается после первого события, причем второе событие отличается от первого события. Способ управления вождением выполняется процессором, выполненным с возможностью управления вождением транспортного средства. В плане вождения действие вождения определяется для каждого из событий, причем действие вождения определяется на основе информации обнаружения, полученной в событиях. Достигается повышение удобства управления транспортным средством. 2 н. и 17 з.п. ф-лы, 21 ил.
1. Способ управления вождением, выполняемый процессором, выполненным с возможностью управления вождением транспортного средства, содержащий этапы, на которых:
получают информацию обнаружения вокруг транспортного средства на основе условия обнаружения, которое может быть задано для каждой точки;
извлекают события, с которыми встречается транспортное средство, на основе информации обнаружения;
размещают извлеченные события в порядке встреч с транспортным средством;
создают план последовательного вождения, в котором действие вождения определено для каждого из событий на основе информации обнаружения, полученной в упомянутых событиях;
выполняют инструкцию управления вождением для транспортного средства в соответствии с планом вождения; и
определяют на основе содержания действия вождения, определенного для первого события, с которым транспортное средство встречается ранее, второе условие обнаружения, относящееся по меньшей мере к одному второму событию, с которым транспортное средство встречается после первого события, причем второе событие отличается от первого события.
2. Способ управления вождением по п. 1, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение, является условие обнаружения для обнаружения объекта с относительно коротким временем до прибытия во второе событие по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка.
3. Способ управления вождением по п. 1, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка, является условие обнаружения для обнаружения объекта с относительно долгим временем до прибытия во второе событие по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение.
4. Способ управления вождением по любому из пп. 1-3, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка, является условие обнаружения, в котором траектория движения транспортного средства изменяется таким образом, что диапазон обнаружения для обнаружения объекта вокруг транспортного средства является относительно широким по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение.
5. Способ управления вождением по любому из пп. 1-4, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение, является условие обнаружения, в котором траектория движения транспортного средства изменяется так, что диапазон обнаружения для обнаружения объекта вокруг транспортного средства является относительно узким по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка.
6. Способ управления вождением по любому из пп. 1-5, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение, является условие обнаружения, в котором вероятность определения того, что объект вокруг транспортного средства вступает в контакт с транспортным средством, установлена низкой по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка.
7. Способ управления вождением по любому из пп. 1-5, в котором в процессе определения условия обнаружения вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является остановка, является условие обнаружения, в котором вероятность определения того, что объект вступает в контакт с транспортным средством, установлена высокой по сравнению со вторым условием обнаружения, относящимся ко второму событию, когда действием вождения в первом событии является движение.
8. Способ управления вождением по любому из пп. 1-7, в котором, когда действием вождения в первом событии является движение, второе условие обнаружения устанавливается равным условию обнаружения, которое включает в себя диапазон обнаружения, относящийся ко второму событию.
9. Способ управления вождением по любому из пп. 1-8, в котором, когда действием вождения в первом событии является остановка, второе условие обнаружения устанавливается равным условию обнаружения, которое исключает диапазон обнаружения, относящийся ко второму событию.
10. Способ управления вождением по любому из пп. 1-9, содержащий этапы, на которых:
получают скорость транспортного средства; и
устанавливают условие обнаружения для обнаружения объекта с более коротким временем до прибытия в событие по мере увеличения скорости транспортного средства.
11. Способ управления вождением по любому из пп. 1-10, в котором в процессе определения условия обнаружения выполняется определение того, следует ли переключать первое условие обнаружения, примененное ранее, на второе условие обнаружения, на основе величины изменения перемещения объекта, полученной из изменения во времени информации обнаружения.
12. Способ управления вождением по любому из пп. 1-11, в котором второе условие обнаружения задается в момент времени, когда действие вождения в первом событии переключается с остановки на движение.
13. Способ управления вождением по любому из пп. 1-12, в котором, когда действие вождения в первом событии переключается во время выполнения плана вождения, действие вождения, определенное для второго события, отменяется.
14. Способ управления вождением по любому из пп. 1-12, в котором, когда действие вождения в первом событии переключается во время выполнения плана вождения, действие вождения во втором событии определяется на основе предварительно определенного правила.
15. Способ управления вождением по п. 14, в котором, когда действие вождения в первом событии изменяется с движения на остановку во время выполнения плана вождения, в котором действием вождения в первом событии является движение, действие вождения во втором событии изменяется на остановку.
16. Способ управления вождением по п. 14 или 15, в котором, когда действие вождения в первом событии изменяется с остановки на движение, действие вождения во втором событии устанавливается в остановку.
17. Способ управления вождением по п. 16, в котором, когда величина перемещения объекта, обнаруженного в первом событии, меньше предварительно определенной величины, действие движения во втором событии устанавливается в движение.
18. Способ управления вождением по любому из пп. 14-17, в котором, когда действие вождения изменяется, план вождения создается на основе измененного действия вождения в событиях.
19. Оборудование управления вождением, содержащее:
устройство связи, выполненное с возможностью получения информации обнаружения вокруг транспортного средства; и
процессор, выполненный с возможностью выполнения процесса управления вождением,
причем процессор дополнительно выполнен с возможностью исполнять:
процесс получения информации обнаружения на основе условия обнаружения, которое может быть задано для каждой точки;
процесс извлечения событий, с которыми встречается транспортное средство, на основе информации обнаружения;
процесс размещения извлеченных событий в порядке встреч с транспортным средством;
процесс создания плана вождения, в котором действие вождения определяется для каждого из событий на основе информации обнаружения, полученной в упомянутых событиях;
процесс выполнения инструкции управления вождением для транспортного средства в соответствии с планом вождения; и
процесс определения на основе содержания действия вождения, определенного для первого события, с которым транспортное средство встречается ранее, второго условия обнаружения, относящегося по меньшей мере к одному событию, с которым транспортное средство встречается после первого события, причем второе событие отличается от первого события.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| УСТРОЙСТВО ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ В ВОЖДЕНИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2624373C1 |

