ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие относится к способу и устройству для определения действия движения рассматриваемого транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] В качестве средства управления для определения действия движения рассматриваемого транспортного средства JP2015-170233A раскрывает средство управления, когда рассматриваемое транспортное средство пересекает встречную полосу движения и поворачивает в точке пересечения. В частности, выделяется пересечение между маршрутом движения рассматриваемого транспортного средства и маршрутом движения другого транспортного средства, движущегося по встречной полосе движения, и оценивается, сталкиваются ли рассматриваемое транспортное средство и другое транспортное средство друг с другом на пересечении. Когда определено, что рассматриваемое транспортное средство не сталкивается с другим транспортным средством, рассматриваемому транспортному средству обеспечивается возможность выехать в точку пересечения, и, когда определено, что рассматриваемое транспортное средство не сталкивается с другим транспортным средством, рассматриваемому транспортному средству обеспечивается возможность остановиться до точка пересечения.
Сущность изобретения
[0003] Однако, когда определяется, что рассматриваемое транспортное средство движется или останавливается на пересечении двух маршрутов движения, как описано в вышеупомянутом документе, как только определяется, что рассматриваемое транспортное средство может въехать в точку пересечения, например, содержание, определенное для пересечения, принимается до и после пересечения, и различные определения не производятся до и после пересечения. Следовательно, в сцене, в которой рассматриваемое транспортное средство выезжает на дорогу, по которой движется с преимуществом другое транспортное средство, в ситуации, когда происходит изменение ситуации, например, в случае, когда скорость транспортного средства другого транспортного средства изменяется, например, в случае, когда ситуация меняется на ситуацию, когда рассматриваемое транспортное средство желательно остановиться перед пересечением, бывают случаи, в которых действие не может быть гибко определено, рассматриваемое транспортное средство въезжает на пересечение, а рассматриваемое транспортное средство останавливается в положении, удаленном от пересечения. То есть сложно гибко определить действие, подходящее для ситуации движения, просто определив, может ли рассматриваемое транспортное средство въехать или остановиться в месте пересечения между маршрутом движения рассматриваемого транспортного средства и маршрутом движения другого транспортного средства, движущегося на встречной полосе движения.
[0004] Следовательно, ввиду вышеупомянутой проблемы, цель настоящего раскрытия сущности состоит в том, чтобы предоставить способ для определения действия движения, который может гибко реагировать на изменение ситуации.
[0005] Согласно одному варианту осуществления настоящего изобретения предоставляется способ определения действия транспортного средства, применимый к устройству управления движением. Способ содержит: посредством контроллера, выполненного с возможностью получения информации о ситуации движения дороги, по которой движется рассматриваемое транспортное средство, обнаруженной датчиком, и определения действия движения на основе информации о ситуации движения, установку по меньшей мере одной точки определения управления на первом маршруте, по которой движется рассматриваемое транспортное средство при движении по первому маршруту, при этом точка определения управления определяет, двигаться или останавливать рассматриваемое транспортное средство, с использованием информации о ситуации движения; и определение, двигаться или останавливать рассматриваемое транспортное средство в точке определения управления, прежде чем рассматриваемое транспортное средство достигнет точки определения управления. Контроллер дополнительно выполнен с возможностью: определения на основе информации о ситуации движения, выезжает ли рассматриваемое транспортное средство на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством по первому маршруту, по которому движется рассматриваемое транспортное средство; и в случае, когда определено, что рассматриваемое транспортное средство выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установки точек определения управления более плотно, чем в других случаях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
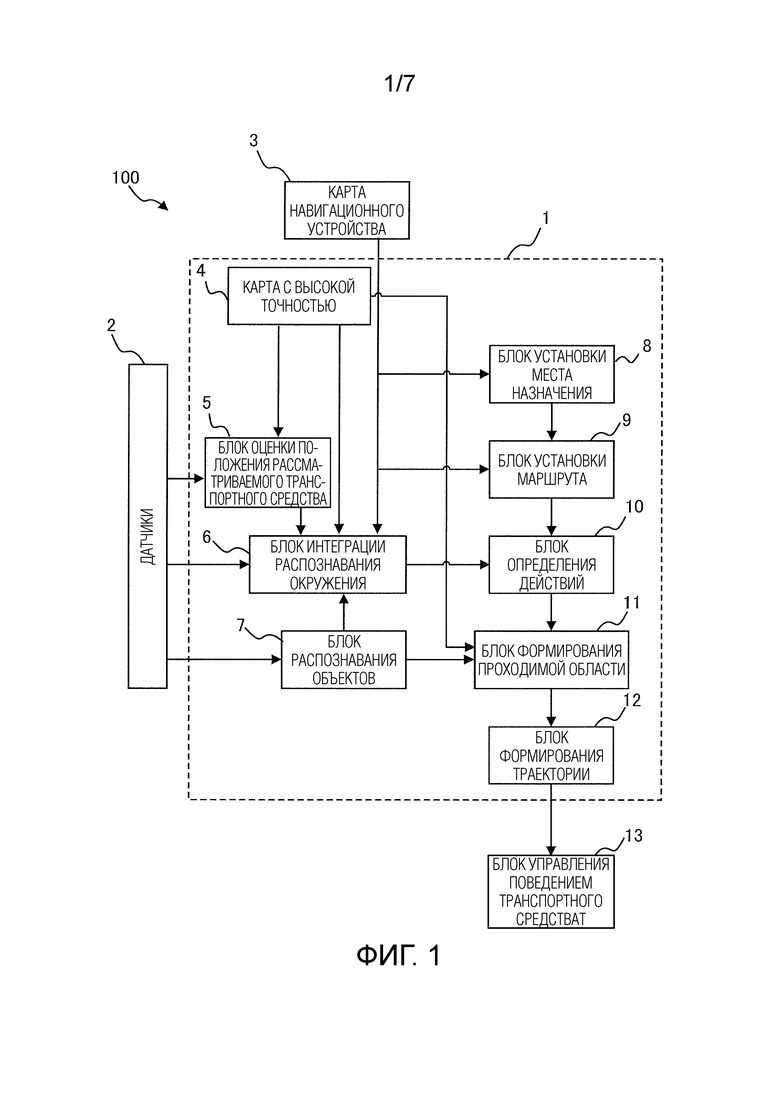
[0006] Фиг. 1 - схематическая диаграмма конфигурации системы поддержания движения;
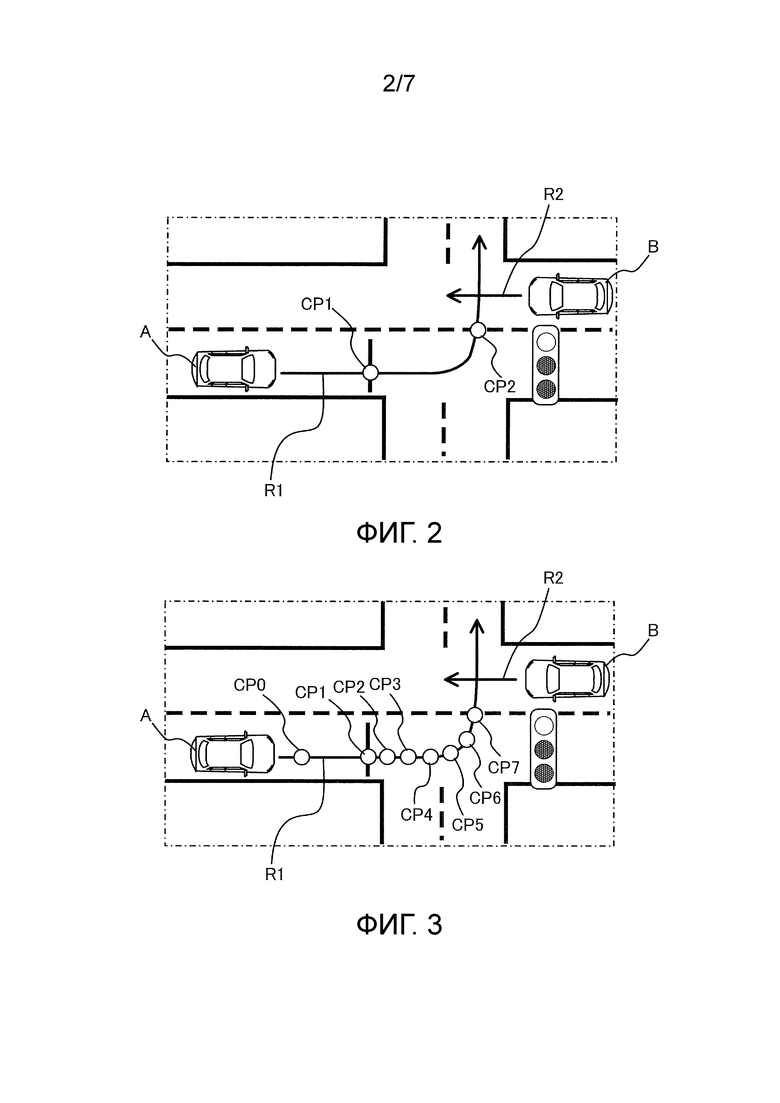
Фиг. 2 - схема, иллюстрирующая управление сравнительного примера в ситуации, когда рассматриваемое транспортное средство пересекает встречную полосу движения и проезжает через точку пересечения;
Фиг. 3 - схема, иллюстрирующая управление согласно варианту осуществления настоящего раскрытия в ситуации, когда рассматриваемое транспортное средство пересекает встречную полосу движения и проезжает через точку пересечения;
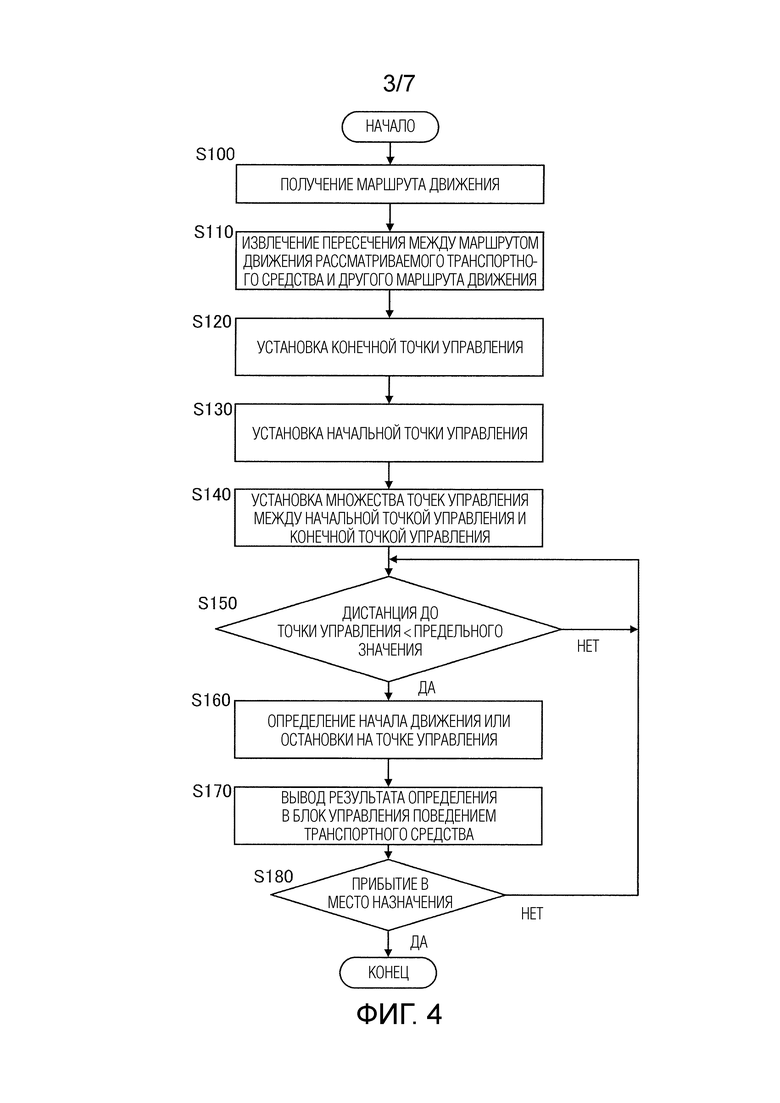
Фиг. 4 - схема, иллюстрирующая процедуру управления, выполняемую блоком определения действия;
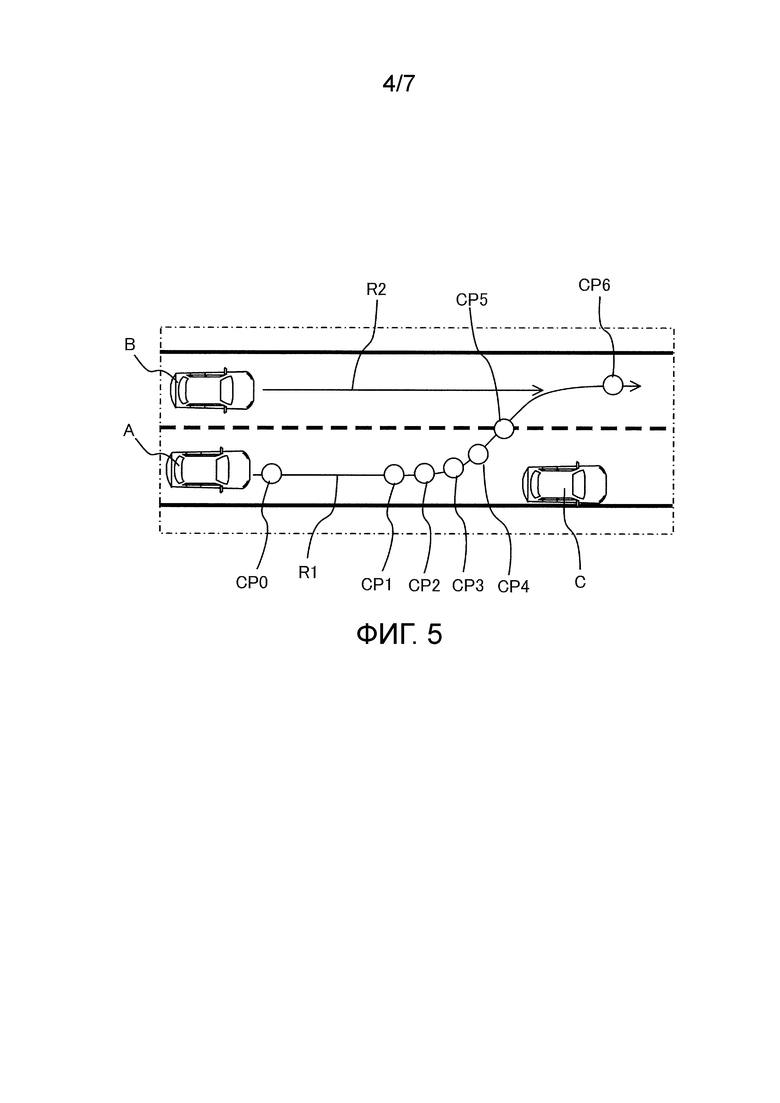
Фиг. 5 - схема, иллюстрирующая ситуацию, когда выполняется смена полосы движения;
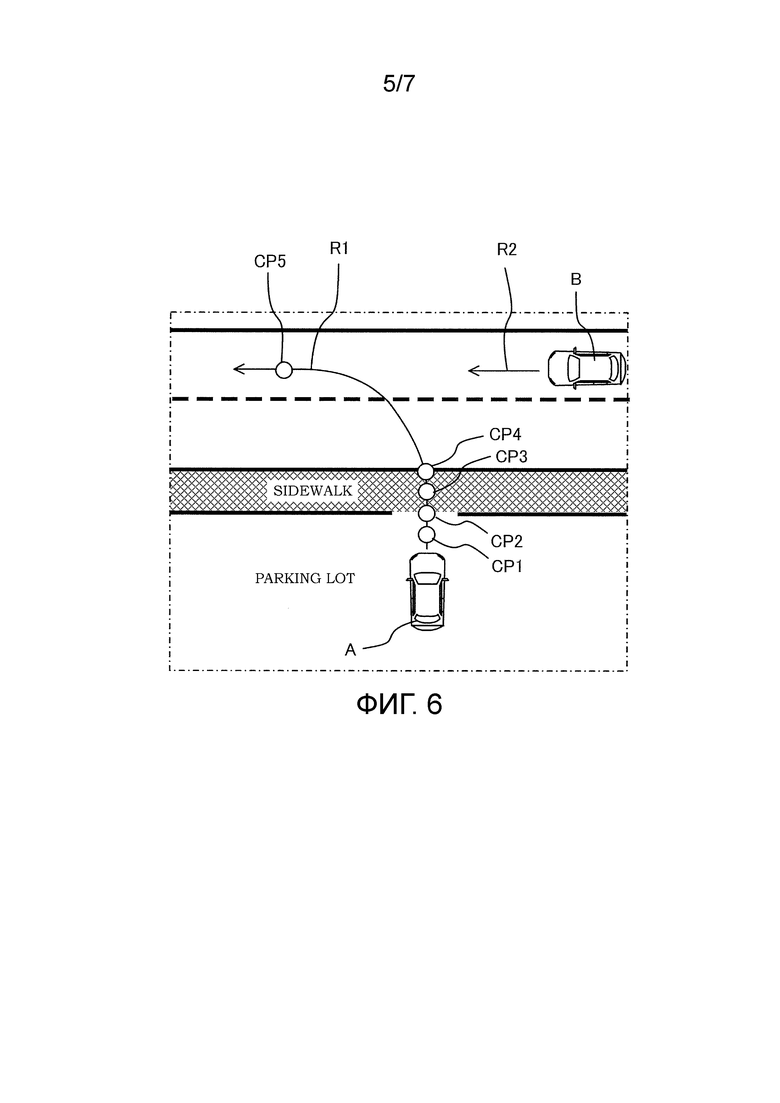
Фиг. 6 - схема, иллюстрирующая ситуацию, когда транспортное средство выезжает на дорогу с парковки на обочине дороги;
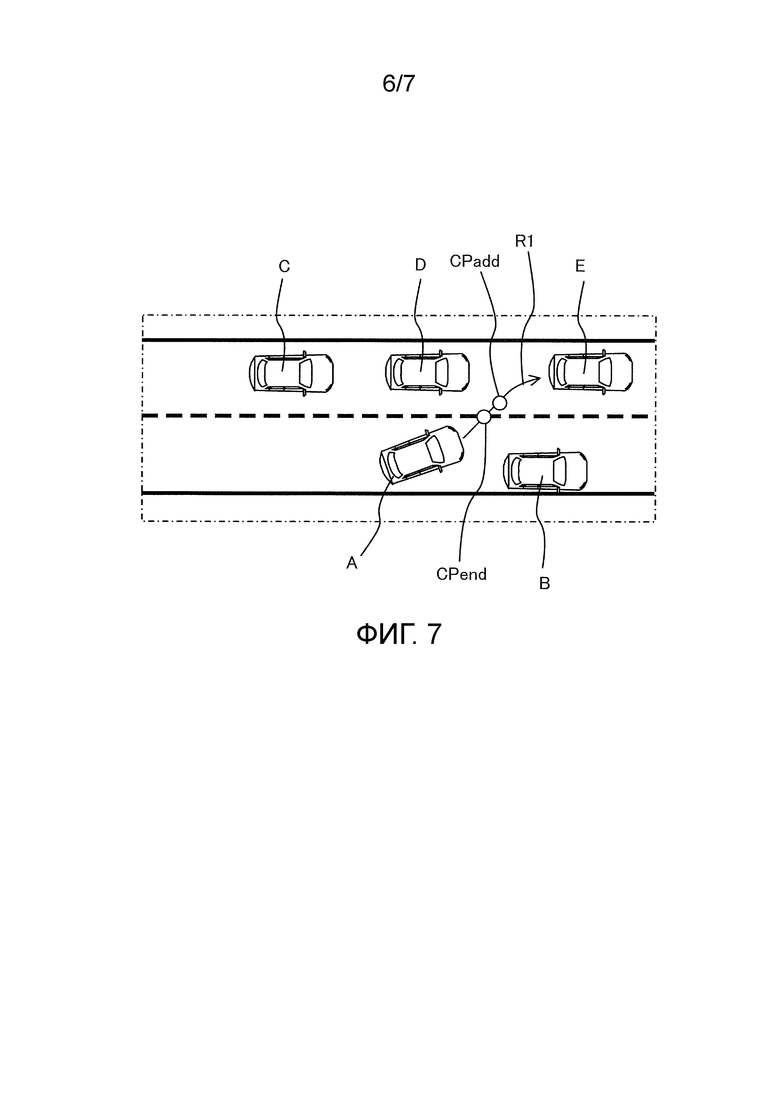
Фиг. 7 - диаграмма, иллюстрирующая ситуацию, когда смена полосы движения выполняется во время затора на дороге; и
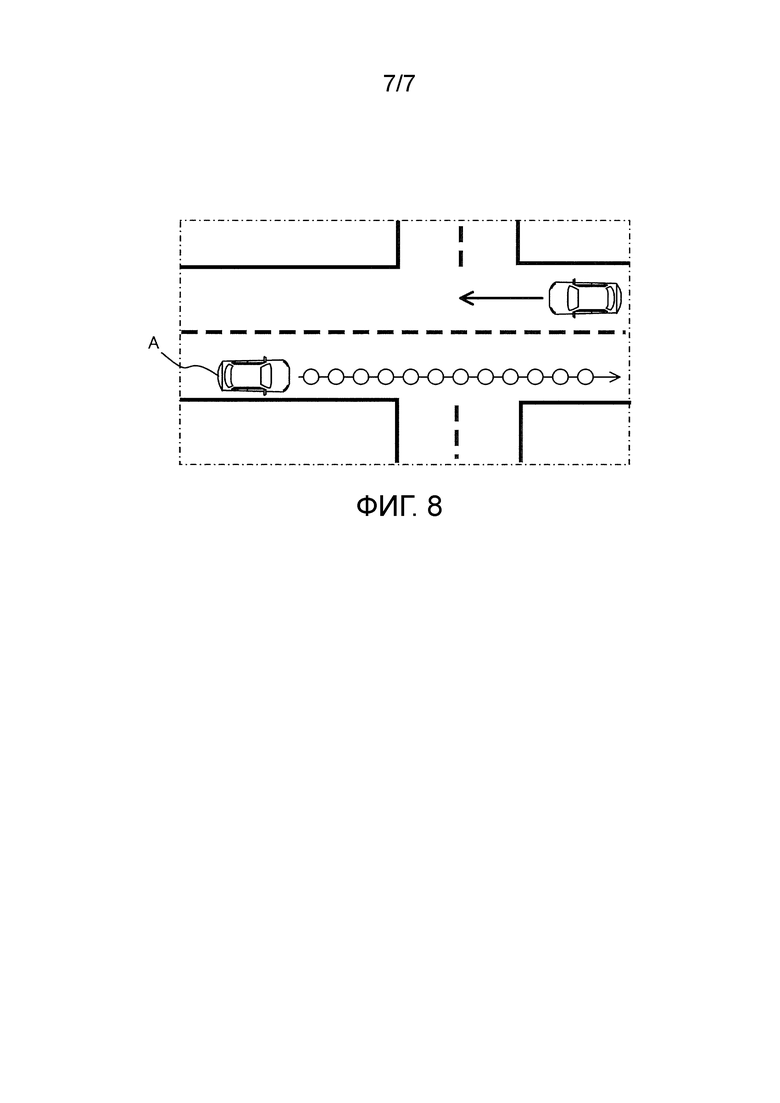
Фиг. 8 - схема, иллюстрирующая ситуацию, когда транспортное средство движется прямо через точку пересечения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0007] В дальнейшем варианты осуществления согласно настоящему раскрытию будут описаны со ссылкой на чертежи. В вариантах осуществления будет описан случай, когда устройство для определения действия транспортного средства согласно настоящему раскрытию применяется к системе 100 поддержания движения, установленной на транспортном средстве.
[0008] Фиг. 1 представляет собой схему конфигурации системы 100 поддержания движения. Система 100 поддержания движения включает в себя, по меньшей мере, устройство 1 поддержания движения в качестве контроллера, датчики 2, карту 3 навигационного устройства и блок 13 управления поведением транспортного средства.
[0009] Датчики 2 обнаруживают информацию об окружении рассматриваемого транспортного средства. Окружение включает в себя другие транспортные средства, пешеходов, объекты вокруг дорог и т.п. Датчики 2 включают в себя камеры, радары, устройства обнаружения и определения дальности с помощью света (LIDAR) и т.п., установленные на транспортном средстве. Камеры захватывают изображения окружения рассматриваемого транспортного средства и выводят полученные изображения в виде данных изображения. Множество камер установлено для захвата изображений передней, боковой и задней стороны рассматриваемого транспортного средства. Радары выдают в качестве радиолокационной информации волны, отраженные по отношению к электромагнитным волнам, излучаемым в сторону окружения рассматриваемого транспортного средства. Множество радаров устанавливается так же, как и камеры. LIDAR (лидар) оценивает трехмерное положение точки отражения на основе отраженных волн лазеров, излучаемых рассматриваемым транспортным средством во всех направлениях, и выводит оцененное трехмерное положение как трехмерную информацию о местоположении. Кроме того, в качестве фотоаппаратов, радаров и лидаров можно использовать таковые известные.
[0010] Карта 3 навигационного устройства представляет собой картографическую информацию, хранящуюся в навигационном устройстве, которое принимает информацию о местоположении (широту и долготу) от искусственного спутника. Кроме того, картографическая информация не ограничивается хранением в основном корпусе навигационного устройства и может храниться на внешнем запоминающем устройстве, способном взаимодействовать с навигационным устройством. Упомянутый здесь искусственный спутник представляет собой, например, спутник глобальной системы позиционирования (GPS), спутник глобальной навигационной спутниковой системы (ГЛОНАСС) и квазизенитный спутник.
[0011] Устройство 1 поддержания движения и блок 13 управления поведением транспортного средства состоят из микрокомпьютера, оснащенного центральным процессором (CPU), постоянным запоминающим устройством (ROM), оперативным запоминающим устройством (RAM) и как. Кроме того, также возможно каждое из устройства 1 поддержания движения и блока 13 управления поведением транспортного средства может быть выполнено в виде множества микрокомпьютеров.
[0012] Устройство 1 поддержания движения считывает выходную информацию датчиков 2 и карту 3 навигационного устройства и выполняет следующую обработку.
[0013] Блок 5 оценки положения рассматриваемого транспортного средства оценивает конкретное текущее положение рассматриваемого транспортного средства путем сопоставления текущего положения рассматриваемого транспортного средства, полученного навигационным устройством, с картой 4 с высокой точностью. Карта 4 с высокой точностью может быть сохранена заранее в устройстве 1 поддержания движения или может храниться во внешнем запоминающем устройстве, способном взаимодействовать с устройством 1 поддержания движения. Карта 4 с высокой точностью имеет более высокую точность определения местоположения, чем карта 3 навигационного устройства. Кроме того, карта 3 навигационного устройства не имеет подробной информации о полосе движения дороги, но карта 4 с высокой точностью содержит подробную информацию о полосе движения. Кроме того, если информацию о местоположении с искусственного спутника получить невозможно, блок 5 оценки местоположения рассматриваемого транспортного средства идентифицирует текущее положение, с использованием информации изображения с камер.
[0014] Блок 7 распознавания объектов определяет, является ли обнаруженный объект транспортным средством, пешеходом или другим объектом, и дополнительно определяет направления его движения на основе информации, обнаруженной датчиками 2.
[0015] Блок 6 интеграции распознавания окружения сопоставляет предполагаемое положение рассматриваемого транспортного средства, информацию, обнаруженную датчиками 2, и информацию, распознанную блоком 7 распознавания объектов, с картой 4 с высокой точностью и картой 3 навигационного устройства, тем самым формируют данные, указывающие текущее положение рассматриваемого транспортного средства, то, что находится вокруг рассматриваемого транспортного средства, и где оно находится вокруг рассматриваемого транспортного средства. Кроме того, блок 6 интеграции распознавания окружения может перезаписывать данные, если окружение изменяется во время движения.
[0016] Блок 8 установки места назначения устанавливает место назначения, введённое оператором на карте 3 навигационного устройства. Блок 9 установки маршрута устанавливает маршрут движения на карте 3 навигационного устройства от текущего положения рассматриваемого транспортного средства до места назначения.
[0017] Блок 10 определения действий устанавливает множество точек определения управления на маршруте движения на основе маршрута движения к месту назначения и информации от блока 6 интеграции распознавания окружения и блока 7 распознавания объектов, и определяет, следует ли двигаться или останавливаться в каждой из точек определения управления. Маршрут движения к месту назначения и информация от блока 6 интеграции распознавания окружения и блока 7 распознавания объектов также упоминаются как информация о ситуации движения. Ситуация движения включает в себя ситуацию на дорожной конструкции, например стоп-линию или временную остановку, в дополнение к ситуации, когда рассматриваемое транспортное средство пересекается с пересечением или другим транспортным средством. Установка точек определения управления и определение движения/остановки будут описаны ниже. Кроме того, в точках определения управления могут быть добавлены и определены другие действия, такие как движение и остановка (например, замедление).
[0018] Блок 11 формирования проходимой области определяет область, в которой рассматриваемое транспортное средство может перемещаться, на основе информации из карты 4 с высокой точностью, блока 6 интеграции распознавания окружения и блока 7 распознавания объектов. В частности, определяется, по какой полосе движения движется рассматриваемое транспортное средство и в каком положении на полосе движения движется рассматриваемое транспортное средство. Например, когда велосипед движется впереди полосы движения, по которой в настоящее время движется рассматриваемое транспортное средство, положение движения устанавливается таким образом, чтобы можно было обеспечить соответствующее расстояние между рассматриваемым транспортным средством и велосипедом во время обгона. Кроме того, если есть припаркованное транспортное средство перед движущейся в данный момент полосой движения, определяется, можно ли избежать припаркованного транспортного средства, пока рассматриваемое транспортное средство остается на текущей движущейся полосе движения, или необходимо сменить полосу движения.
[0019] Блок 12 формирования траектории формирует траекторию движения рассматриваемого транспортного средства (в дальнейшем эта траектория движения также упоминается как первый маршрут) на основе установленного маршрута движения к месту назначения, результат определения блоком определения действий 10, и проходимой области, определенной блоком 11 формирования проходимой области. Траектория движения здесь включает в себя профиль скорости транспортного средства в дополнение к траектории, относящейся к положению, например, где выполняется смена полосы движения и где рассматриваемое транспортное средство движется или останавливается на маршруте движения к месту назначения. Например, когда на маршруте движения есть кривая, профиль скорости транспортного средства устанавливается таким образом, что рассматриваемое транспортное средство замедляется перед поворотом и ускоряется после прохождения кривой.
[0020] Траектория движения, сформированная, как описано выше, выводится как данные из устройства 1 поддержания движения в блок 13 управления поведением транспортного средства. Блок 13 управления поведением транспортного средства управляет источником привода, тормозным устройством, рулевым устройством и т.п. транспортного средства на основе траектории движения.
[0021] Далее будут описаны точки определения управления, установленные блоком 10 определения действия.
[0022] Блок 10 определения действий извлекает событие, которое должно определять, двигаться или останавливаться на первом маршруте (в дальнейшем также называемое определением необходимого события). Определение необходимого события - это обстоятельство, событие или ситуация, такие как событие, в котором установлены светофоры, событие, при котором рассматриваемое транспортное средство проезжает пересечение со вторым маршрутом, который является маршрутом другого транспортного средства или пешехода, событие, при котором рассматриваемое транспортное средство выезжает на второй маршрут с первого маршрута, событие, при котором рассматриваемое транспортное средство проезжает другое транспортное средство, и т.п. Событие может быть выражено как место, где рассматриваемое транспортное средство сталкивается с предметом, или тому подобное. Следовательно, в этом варианте осуществления событие может определяться информацией о местоположении.
[0023] Блок 10 определения действий строит график множества извлеченных определяющих необходимых событий на первом маршруте и устанавливает точки определения управления перед определением необходимых событий. Точки определения управления могут быть установлены в то время, когда устанавливается маршрут движения к месту назначения.
[0024] Перед достижением точек определения управления блок 10 определения действий определяет, следует ли двигаться или останавливаться в точках определения управления. Блок 13 управления поведением транспортного средства предписывает рассматриваемому транспортному средству двигаться или останавливаться в точках определения управления в соответствии с результатом определения. Например, когда определяющими необходимыми событиями являются места установки светофоров, точки определения управления устанавливаются перед светофором, и перед точками определения управления определяется движение или остановка на основе информации изображения из камеры. Кроме того, информация о светофоре может быть получена посредством связи между дорогой и ранспортным средством (roat-to-vehicle communication). Кроме того, когда определяющие необходимые события являются временной стоп-линией, точки определения управления устанавливаются перед временной стоп-линией, и рассматриваемое транспортное средство останавливается в точках определения управления на основе информации изображения с камер.
[0025] В связи с этим, когда транспортное средство движется без предоставления точки определения управления, транспортное средство движется, собирая и обрабатывая всю информацию, которая может быть получена, устанавливает положение остановки после распознавания того, что впереди светофор, и определяет двигаться или останавливаться в зависимости от состояния светофора.
[0026] То есть при управлении, в котором точка определения управления не предусмотрена, положение остановки рассматриваемого транспортного средства определяется в соответствии с окружающей ситуацией, включая движение другого транспортного средства, поэтому необходимо пересчитать положение остановки рассматриваемого транспортного средства в соответствии с ситуацией. Таким образом, новое положение остановки рассчитывается каждый раз при изменении окружающей ситуации. Кроме того, необходимо определить положение остановки на основе модели управления транспортного средства.
[0027] В связи с этим, когда точки определения управления устанавливаются заранее, как в этом варианте осуществления, положение остановки также определяется заранее, и, таким образом, вычислительная нагрузка может быть уменьшена по сравнению с управлением, в котором точка определения управления не предусмотрена.
[0028] Фиг. 2 иллюстрирует ситуацию, когда рассматриваемое транспортное средство пересекает встречную полосу движения и проезжает через пересечение. На рисунке A - рассматриваемое транспортное средство, B - другое транспортное средство, R1 - это первый маршрут, а R2 - второй маршрут.
[0029] В этой ситуации определяющими необходимыми событиями являются светофор, установленный в точке пересечения, и пересечение первого маршрута R1 и второго маршрута R2.
[0030] Сначала будет рассмотрен случай, когда точки определения управления установлены на стоп-линии перед точкой пересечения и на пересечении первого маршрута R1 и полосы движения, по которой движется другое транспортное средство B. В случае, когда светофор находится в состоянии освещения для побуждения транспортного средства к движению, рассматриваемое транспортное средство проходит через первую точку CP1 определения управления, установленную на стоп-линию, и входит в точку пересечения. Затем, когда распознается, что другое транспортное средство B приближается, рассматриваемое транспортное средство останавливается во второй точке CP2 определения управления, установленной в точке, в которой первый маршрут R1 и полоса движения, по которой движется другое транспортное средство B, пересекаются друг с другом. С другой стороны, когда распознается, что расстояние до другого транспортного средства B является достаточным, рассматриваемое транспортное средство проходит через вторую точку CP2 определения управления.
[0031] Кроме того, на фиг. 2, первая точка CP1 определения управления отображается на стоп-линии, а вторая точка CP2 определения управления отображается на центральной линии, но это означает положение остановки, в котором передний край рассматриваемого транспортного средства не пересекает стоп-линию и центральную линию. То же самое относится и к другим чертежам, описанным ниже.
[0032] Необходимо отметить, что после прохождения через первую точку CP1 определения управления может возникнуть необходимость изменить определение для второй точки CP2 определения управления с движения на остановку. Например, это случай, когда другое транспортное средство B, которое не было распознано до тех пор, распознается путем приближения ко второй точке CP2 определения управления и возникает возможность точно определять окружающую ситуацию, или случай, когда другое транспортное средство B ускоряется. или замедляется, и позиционное отношение между рассматриваемым транспортным средством A и другим транспортным средством B изменяется.
[0033] Даже в таком случае рассматриваемое транспортное средство пытается двигаться ко второй точке CP2 определения управления после прохождения через первую точку CP1 определения управления, но в это время может возникнуть следующая проблема.
[0034] (1) Невозможно выполнять движение, при котором рассматриваемое транспортное средство останавливается перед второй точкой CP2 определения управления и постепенно приближается ко второй точке CP2 определения управления оттуда.
[0035] (2) Чтобы постепенно приближаться ко второй точке CP2 определения управления, скорость должна быть уменьшена от первой точки CP1 определения управления.
[0036] (3) Невозможно выполнить движение с постепенным движением или остановкой до второй точки CP2 определения управления и приближаться ко второй точке CP2 определения управления после проверки окружающей ситуации.
[0037] (4) Когда человек управляет рассматриваемым транспортным средством, если ширина полосы движения мала, рассматриваемое транспортное средство имеет склонность останавливаться перед второй точкой CP2 определения управления, чтобы поддерживать расстояние до другого транспортного средства B на время проезда, но такое вождение невозможно.
[0038] То есть только с двумя точками определения управления, описанными выше, невозможно гибко управлять автомобилем в соответствии с изменением окружающей ситуации после прохождения через первую точку CP1 определения управления.
[0039] Следовательно, в этом варианте осуществления точки определения управления устанавливаются, как описано ниже.
[0040] Фиг. 3 показывает пример точек определения управления, установленных в этом варианте осуществления в той же ситуации, что и на фиг. 2. Точки определения управления (первая точка CP1 определения управления и седьмая точка CP7 определения управления) устанавливаются в двух точках, то есть на стоп-линии перед точкой пересечения и точке, в которой первый маршрут R1 и центральная линия пересекаются друг с другом, как на фиг. 2, но в этом варианте осуществления пять точек определения управления от второй точки CP2 определения управления до шестой точки CP6 определения управления устанавливаются между первой точкой CP1 определения управления и седьмой точкой CP7 определения управления. Кроме того, начальная точка CP0 определения управления для управления поворотом в точке пересечения задается перед стоп-линией. Интервал между соседними точками определения управления будет описан позже.
[0041] Как описано выше, в этом варианте осуществления точки определения управления плотно установлены на участке от стоп-линии в качестве начального положения точки пересечения до пересечения первого маршрута R1 и полосы движения, по которой другое транспортное средство B движется. Кроме того, когда нет стоп-линии, начальное положение точки пересечения устанавливается на основе картографической информации.
[0042] Как описано выше, когда точки определения управления плотно установлены в точке пересечения, например, можно определить, что рассматриваемое транспортное средство движется к третьей точке CP3 определения управления до въезда в точку пересечения и останавливается после четвертой точки CP4 определения управления, чтобы обнаруживать окружающую ситуацию в состоянии, когда рассматриваемое транспортное средство останавливается в четвертой точке CP4 определения управления, и изменять определение таким образом, чтобы рассматриваемое транспортное средство перемещалось к седьмой точке CP7 определения управления. Кроме того, когда определяется, что рассматриваемое транспортное средство движется к третьей точке CP3 определения управления определения перед въездом в точку пересечения и останавливается после четвертой точки CP4 определения управления определения, определение пятой точки CP5 определения управления и шестой точки CP9 определения управления может быть изменено на движение в соответствии с изменением окружающей ситуации после въезда в точку пересечения, и рассматриваемое транспортное средство может быть остановлено в седьмой точке CP7 определения управления. Путем плотной установки точек определения управления в точке пересечения таким образом можно решить вышеупомянутые проблемы и выполнить определение действий с высокой надежностью.
[0043] Далее будет описана программа управления, выполняемая блоком 10 определения действия как часть контроллера в этом варианте осуществления.
[0044] Фиг. 4 является схемой для иллюстрации программы управления, выполняемой блоком 10 определения действия. Далее будут описаны этапы.
[0045] На этапе S100 блок 10 определения действий получает первый маршрут, который является маршрутом движения рассматриваемого транспортного средства.
[0046] На этапе S110 блок 10 определения действий извлекает пересечение первого маршрута и второго маршрута, который является маршрутом другого транспортного средства или пешехода, на основе картографической информации. Второй маршрут - это дорога, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством среди дорог, по которым едут или ходят другие транспортные средства или пешеходы. Кроме того, дороги, по которым другие транспортные средства или пешеходы едут или идут на этом этапе, являются дорогами, по которым другие транспортные средства или пешеходы могут передвигаться или ходить. То есть процесс этого этапа выполняется на основе картографической информации без обнаружения датчиками 2 конкретного другого транспортного средства или пешехода.
[0047] На этапе S120 блок 10 определения действий устанавливает конечную точку определения управления в диапазоне, в котором точки определения управления предоставляются на основе извлеченного пересечения. В случае ситуации, показанной на фиг. 3, на основе пересечения первого маршрута R1 и второго маршрута R2 седьмая точка CP7 определения управления, определяющая конечную точку определения управления, устанавливается на пересечении центральной линии и полосы движения, по которой другое транспортное средство B движется перед пересечением первого маршрута R1 и второго маршрута R2.
[0048] На этапе S130 блок 10 определения действий устанавливает начальную точку определения управления в диапазоне, в котором предусмотрены точки определения управления. В случае ситуации, показанной на фиг. 3 устанавливается начальная точка CP0 определения управления.
[0049] На этапе S140 блок 10 определения действий устанавливает множество точек определения управления между начальной точкой определения управления и конечной точкой определения управления. В это время предоставляется диапазон, в котором точки определения управления плотно расположены. Количество устанавливаемых точек определения управления произвольно. В частности, первая точка CP1 определения управления устанавливается в качестве начальной точки определения управления в диапазоне, который становится плотным на стоп-линии перед точкой пересечения. Кроме того, первая точка CP1 определения управления может быть установлена перед точкой пересечения и может быть установлена перед стоп-линией. Однако по мере увеличения количества точек определения управления увеличивается вычислительная нагрузка, и поэтому в этом варианте осуществления первая точка CP1 определения управления устанавливается на стоп-линии с учетом вычислительной нагрузки. Кроме того, конечной точкой определения управления в плотном диапазоне является седьмая точка определения управления CP7.
[0050] Интервалы между соседними точками определения управления устанавливаются так, что контролируемые диапазоны точек определения управления перекрывают друг друга. Контролируемые диапазоны - это диапазоны отклонения от точек определения управления, которые могут быть установлены, когда управление выполняется для остановки в положении, отклоненном от точек определения управления. Это основано на предпосылке, что блок 10 определения действий может выполнять не только управление остановкой рассматриваемого транспортного средства в точке определения управления, но также управление остановкой рассматриваемого транспортного средства в положении X [см] перед точкой определения управления или в положении Y [см] позади точки определения управления.
[0051] Контролируемые диапазоны могут быть установлены произвольно. Однако контролируемые диапазоны на передней стороне и контролируемые диапазоны на задней стороне не обязательно должны быть одинаковыми по отношению к точкам определения управления. Кроме того, нет необходимости устанавливать множество точек определения управления с равными интервалами в диапазоне, в котором точки определения управления плотно установлены. Например, сокращая интервал по мере приближения к конечной точке определения управления, может быть легче реагировать на изменения в ситуации после входа в точку пересечения.
[0052] Посредством установки множества точек определения управления таким образом, чтобы контролируемые диапазоны перекрывались, как описано выше, можно остановить рассматриваемое транспортное средство в произвольном положении между соседними точками определения управления.
[0053] Кроме того, вместо перекрытия контролируемых диапазонов допустимые диапазоны позиционного отклонения могут быть установлены таким образом, чтобы перекрывать друг друга. Допустимый диапазон отклонения положения - это диапазон отклонения между фактически остановленным положением и точкой определения управления, который допустим, когда управление выполняется для остановки в точке определения управления. Например, в случае, когда транспортное средство останавливается на дороге, ведущей в гору, или в случае, когда транспортное средство останавливается из-за движения на низкой скорости, транспортное средство имеет склонность останавливаться до точки определения управления, но если это не разрешено в все, контроль усложняется. Поэтому предусмотрен допустимый диапазон позиционного отклонения. Допустимая степень может быть установлена произвольно. Устанавливая допустимые диапазоны позиционного отклонения таким образом, чтобы они перекрывали друг друга, можно остановить рассматриваемое транспортное средство в пределах допустимого диапазона от точки определения управления, которая должна быть остановлена. Кроме того, допустимые диапазоны позиционного отклонения могут быть установлены произвольно, но могут быть изменены в соответствии с величиной сопротивления дорожного покрытия. Например, когда идет дождь, сопротивление дорожного покрытия уменьшается, а тормозной путь увеличивается, и, таким образом, допустимый диапазон за точкой определения управления может быть расширен.
[0054] Как описано выше, когда установлено множество точек определения управления, блок 10 определения действий определяет на этапе S150, меньше ли расстояние до точки определения управления перед текущим положением рассматриваемого транспортного средства в направлении движения чем пороговое значение, и когда результат определения положительный, блок 10 определения действий выполняет этап S160, а когда результат определения отрицательный, блок 10 определения действий повторно выполняет этап S150. Хотя пороговое значение может быть установлено произвольно, пороговое значение устанавливается с учетом информации, необходимой для определения движения или остановки в точке определения управления, например, расстояние, на котором состояние светофора, наличие или отсутствие встречного транспортного средства и т.п.
[0055] На этапе S160 блок 10 определения действий определяет, на основе информации от блока 6 интеграции распознавания окружения, начать движение или остановиться в точке определения управления более близкой, чем пороговое значение. То есть определение этого этапа выполняется для других транспортных средств или пешеходов, обнаруженных датчиками 2. Например, когда от первой точки CP1 определения управления до седьмой точки CP7 определения управления более близкой, чем пороговое значение на фиг. 3, начало движения или остановка определяется на основе состояния светофора, положения и скорости транспортного средства другого транспортного средства B и т.п. Кроме того, формирование данных в блоке 6 интеграции распознавания окружения выполняется с помощью программы управления, отличной от этой программы управления.
[0056] На этапе S170 блок 10 определения действий выводит результат определения на этапе S150 в блок 13 управления поведением транспортного средства. Блок 13 управления поведением транспортного средства управляет источником движения, тормозным устройством и рулевым устройством на основе результата определения.
[0057] На этапе S180 блок 10 определения действий определяет, прибыло ли рассматриваемое транспортное средство в место назначения, завершает эту процедуру, если рассматриваемое транспортное средство прибыло, и возвращается к этапу S150, если рассматриваемое транспортное средство не прибыло.
[0058] Способ определения действия, описанный выше, то есть способ определения действия рассматриваемого транспортного средства путем предоставления диапазона, в котором множество точек определения управления плотно установлено, применим не только к ситуации на фиг. 3, но и в других ситуациях, описанных ниже.
[0059] Фиг. 5 представляет собой ситуацию, когда припаркованное транспортное средство C находится перед полосой движения, по которой движется рассматриваемое транспортное средство A, и выполняется смена полосы движения, чтобы избежать припаркованного транспортного средства C. В этой ситуации другое транспортное средство B движется по полосе движения изменения места назначения, и второй маршрут R2 другого транспортного средства B пересекается с первым маршрутом R1.
[0060] Когда формируется первый маршрут R1 для объезда припаркованного транспортного средства C, блок 10 определения действий устанавливает точку CP0 определения управления как начальную точку операции смены полосы движения, а точку CP6 определения управления как конечную точку, и плотно устанавливает первую точку CP1 определения управления на пятую точку CP5 определения управления между точкой CP0 определения управления и точкой CP6 определения управления. Первая точка CP1 определения управления, которая является начальной точкой определения управления в плотном диапазоне, является положением, в котором начинается руление. Пятая точка CP5 определения управления, которая является конечной точкой определения управления в плотном диапазоне, является пересечением между полосой движения изменения места назначения и первым маршрутом R1. Кроме того, в этой ситуации, чем выше скорость транспортного средства на полосе движения изменения места назначения, тем дальше устанавливается более плотный диапазон от пересечения между полосой движения изменения места назначения и первым маршрутом R1. Это связано с тем, что даже когда скорость транспортного средства уменьшается в плотном диапазоне, участок, на котором рассматриваемое транспортное средство ускоряется от последней пятой точки CP5 определения управления определения, до тех пор, пока рассматриваемое транспортное средство не выезжает на полосу движения изменения места назначения, является безопасным.
[0061] Посредством установки множества точек определения управления, как описано выше, можно выполнять смену полосы движения, избегая столкновения с припаркованным транспортным средством C и другим транспортным средством B. Путем плотной установки множества точек определения управления от начальной точки операции смены полосы движения, можно гибко реагировать на изменение ситуации, например ускорение или замедление другого транспортного средства B. Кроме того, случай, когда полоса движения, по которой движется рассматриваемое транспортное средство A, присоединяется к полосе движения, в которой движется другое транспортное средство B, такой как выезд на высокоскоростную автомагистраль, аналогично случаю, показанному на фиг. 5.
[0062] Фиг. 6 показывает ситуацию, когда рассматриваемое транспортное средство A выезжает на дорогу, по которой другое транспортное средство B выезжает с парковки на обочине. Предполагается, что между парковкой и дорогой есть тротуар.
[0063] Когда формируется первый маршрут R1, который проходит через тротуар от парковки и выходит на дорогу, блок 10 определения действий устанавливает первую точку CP1 определения управления в качестве начальной точки операции присоединения и пятую точку CP5 определения управления в качестве конечной точки и плотно устанавливает вторую точку CP2 определения управления на четвертую точку CP4 определения управления между первой точкой CP1 определения управления и пятой точкой CP5 определения управления. Кроме того, в этой ситуации точки определения управления от первой точки CP1 определения управления до четвертой точки CP4 определения управления находятся в плотном диапазоне.
[0064] Четвертая точка CP4 определения управления определения, которая является конечной точкой плотного диапазона, является границей между тротуаром и дорогой. Кроме того, точка определения управления также устанавливается на границе между парковкой и тротуаром. На фиг. 6 вторая точка CP2 определения управления соответствует этой точке определения управления.
[0065] Когда точки определения управления установлены, как описано выше, сначала определяется, должно ли рассматриваемое транспортное средство останавливаться перед тротуаром, и, если на маршруте, пересекающем первый маршрут R1, есть пешеход, рассматриваемое транспортное средство остановится на второй точке определения управления CP2. Когда пешехода нет или когда пешеход проходит мимо, рассматриваемое транспортное средство проходит через вторую точку CP2 определения управления и третью точку CP3 определения управления и приближается к четвертой точке CP4 определения управления. Затем обнаруживается состояние дороги в месте назначения при выезде, и определяется, остановиться или нет в четвертой точке CP4 определения управления.
[0066] Посредством установки множества точек определения управления, как описано выше, можно осуществлять выезд, избегая при этом столкновения с пешеходом и другим транспортным средством B, движущимся по дороге. Затем, обеспечивая диапазон, в котором множество точек определения управления плотно установлено, даже если есть изменение в состоянии тротуара или дороги в месте назначения при выезде, можно гибко реагировать.
[0067] Необходимо отметить, что может быть сложно определить, двигаться или остановиться. В таком случае точка определения управления может быть добавлена на стороне направления движения конечной точки плотного диапазона. Это будет описано со ссылкой на фиг. 7.
[0068] Фиг. 7 - ситуация смены полосы движения, чтобы избежать столкновения с припаркованным транспортным средством перед полосой движения, по которой движется рассматриваемое транспортное средство A, как на фиг. 5. Однако изменяемая полоса движения перегружена, и с первого другого транспортного средства C на третье другое транспортное средство E находится поблизости от рассматриваемого транспортного средства A. Конечная точка CPend определения управления является точкой определения управления, соответствующей пятой точке CP5 определения управления на фиг. 5.
[0069] В этой ситуации предполагается, что создается первый маршрут R1, соединяющий второе другое транспортное средство D и третье другое транспортное средство E.
[0070] В этой ситуации, поскольку определяется, должен ли водитель второго другого транспортного средства D остановиться в зависимости от того, намерен ли водитель второго другого транспортного средства D принять перестроение рассматриваемого транспортного средства A, сложно определить, должно ли рассматриваемое транспортное средство A двигаться, только на основании позиционного отношения между вторым другим транспортным средством D и рассматриваемым транспортным средством A. То есть, даже если определено, что рассматриваемое транспортное средство останавливается в конечной точке CPend определения управления на основании причины, по которой обнаружено второе другое транспортное средство D, можно сказать, что надежность определения низкая. В таком случае дополнительная точка CPadd определения управления устанавливается на стороне направления движения конечной точки CPend определения управления. Затем рассматриваемое транспортное средство медленно перемещается к дополнительной точке CPadd определения управления. Когда установлена дополнительная точка CPadd определения управления, интервал между дополнительной точкой CPadd определения управления и конечной точкой CPend определения управления задается таким образом, что контролируемые диапазоны или допустимые диапазоны позиционного отклонения, описанные выше, перекрываются.
[0071] Кроме того, в ситуации на фиг. 6, точка определения управления может быть добавлена в случае, когда трудно выполнить определение с высокой надежностью до четвертой точки CP4 определения управления из-за такой причины, как присутствие припаркованного транспортного средства на дороге.
[0072] В этом варианте осуществления, как описано выше, посредством использования контроллера, который получает информацию о ситуации движения дороги, по которой движется рассматриваемое транспортное средство, обнаруженной датчиками, и определяет действие движения на основе информации о ситуации движения по меньшей мере одну точку определения управления для определение движения или остановки рассматриваемого транспортного средства устанавливается на первом маршруте, по которому движется рассматриваемое транспортное средство, с использованием информации о ситуации движения, и определяется, предписывать ли рассматриваемому транспортному средству движение или остановку в точке определения управления перед тем, как рассматриваемое транспортное средство достигает точки определения управления. Контроллер дополнительно определяет, с использованием информации о ситуации движения, выезжает ли рассматриваемое транспортное средство на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством на первом маршруте, по которому движется рассматриваемое транспортное средство, и устанавливает точки определения управления в случае, когда определяется, что рассматриваемое транспортное средство выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, более плотно, чем в других случаях. Кроме того, информация о ситуации движения включает в себя ситуацию на дорожной конструкции, например стоп-линию или временную остановку, в дополнение к ситуации, когда рассматриваемое транспортное средство пересекается с пересечением или другим транспортным средством. Следовательно, упомянутые здесь датчики не ограничиваются датчиками 2, но также включают в себя датчики, которые извлекают данные карты из информации глобальной навигационной спутниковой системы (GNSS) для обнаружения структуры дороги.
[0073] В результате, даже если окружающая ситуация меняется при движении перед событием, соответствующее управление может выполняться в соответствии с ситуацией. Например, когда другое транспортное средство или подобное, которое не было обнаружено до тех пор, обнаружено, определение рассматриваемого транспортного средства переключается, и рассматриваемое транспортное средство может перемещаться на основе определения после переключения. Также можно постепенно приближаться к событию, переключаясь на остановку или замедление перед событием. Увеличивая количество точек определения управления, можно также переключиться из соответствующего положения перед событием для замедления. Кроме того, в ситуации, когда необходимо надежно определить пробег или остановку, можно остановиться перед событием и переключиться на пробег для приближения к событию после обнаружения окружающей ситуации. Как описано выше, согласно этому варианту осуществления определения, касающиеся множества точек определения управления, накапливаются для определения остановки или движения, так что может быть получен высоконадежный результат определения.
[0074] Как описано выше, был описан случай, когда рассматриваемое транспортное средство выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, но когда рассматриваемое транспортное средство не выезжает на дорогу, точка определения управления может быть установлена только в том месте, где необходимо определить, следует ли осуществлять движение или остановить рассматриваемое транспортное средство на первом маршруте. Например, в случае, когда припаркованное транспортное средство находится впереди, пока рассматриваемое транспортное средство движется по узкой дороге, и рассматриваемое транспортное средство останавливается перед припаркованным транспортным средством, или в случае, когда рассматриваемое транспортное средство останавливается на временной стоп-линии. в точке пересечения точка определения управления устанавливается только в положение остановки.
[0075] В этом варианте осуществления выделяется пересечение между первым маршрутом и дорогой, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, и точки определения управления плотно устанавливаются на основе пересечения. Как описано выше, можно увеличить количество точек определения управления до того, как рассматриваемое транспортное средство выедет на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством. В результате положение движения и положение остановки можно гибко настраивать в соответствии с окружающими условиями при движении.
[0076] В этом варианте осуществления точки определения управления плотно установлены между пересечением рассматриваемого транспортного средства и дорогой, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством. В результате область, в которой увеличиваются точки определения управления, ограничивается, так что можно подавить ненужное увеличение точек определения управления и уменьшить вычислительную нагрузку.
[0077] В этом варианте осуществления в ситуации, когда рассматриваемое транспортное средство проезжает через точку пересечения, контроллер устанавливает начальную точку области, в которой точки определения управления плотно установлены в начальное положение точки пересечения, в которой пересекаются первый маршрут и дорога, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством. Соответственно, можно надежно переключаться на участке, где может потребоваться переключение определения. Кроме того, когда есть стоп-линия, начальное положение точки пересечения может быть стоп-линией. В случае, когда перед точкой пересечения есть пешеходный переход, начальное положение точки пересечения может быть на заранее определенном расстоянии до пешеходного перехода. Кроме того, начальная точка области, в которой точки определения управления плотно установлены, может быть установлена на заранее определенное расстояние до конечной точки области.
[0078] В этом варианте осуществления в ситуации, когда рассматриваемое транспортное средство проезжает через точку пересечения, контроллер устанавливает конечную точку области, в которой точки определения управления плотно установлены, в положение, в котором первый маршрут пересекается с другим транспортным средством или пешеходом. Соответственно, можно надежно избежать контакта с другим транспортным средством или пешеходом. Положение пересечения с другим транспортным средством или пешеходом - это положение пересечения между первым маршрутом и полосой движения, по которой движется другое транспортное средство, или положение пересечения между первым маршрутом и пешеходным переходом, по которому идет пешеход. Кроме того, конечная точка может быть точкой, проходящей в направлении движения на заранее определенное расстояние от начальной точки.
[0079] В этом варианте осуществления, когда рассматриваемое транспортное средство выполняет смену полосы движения на другую полосу движения, контроллер устанавливает начальную точку области, в которой точки определения управления плотно установлены, как начальную точку операции смены полосы движения или операции присоединения. Соответственно, можно надежно переключаться на участке, где может потребоваться переключение определения.
[0080] Кроме того, начальная точка может быть изменена в соответствии с ограничением скорости сменяющейся полосы движения или присоединяющейся полосы движения. В этом случае, чем выше ограничение скорости, тем ближе начальная точка. Кроме того, начальная точка может быть изменена в соответствии с шириной проезжей части изменяющейся полосы движения или присоединяющейся полосы движения. В этом случае, чем меньше ширина дороги, тем ближе начальная точка. В любом случае можно уменьшить страх людей, занимающих место в транспортном средстве. Кроме того, начальная точка может быть точкой непосредственно перед конечной точкой на заранее определенное расстояние.
[0081] В этом варианте осуществления, когда рассматриваемое транспортное средство выезжает на дорогу от объекта (например, парковки) на обочине, контроллер предоставляет область для плотной установки точек определения управления перед дорогой места назначения при выезде. В результате можно плавно двигаться в соответствии с изменением ситуации, пока рассматриваемое транспортное средство не выедет на дорогу.
[0082] В этом варианте осуществления в ситуации, когда рассматриваемое транспортное средство выезжает на дорогу от объекта на обочине дороги, контроллер устанавливает конечную точку области, в которой точки определения управления плотно установлены в положение, в котором дорога места назначения при выезде и первый маршрут пересекаются друг с другом. Соответственно, можно надежно избежать контакта с другим транспортным средством и пешеходом.
[0083] Кроме того, конечная точка может быть изменена в соответствии с ограничением скорости присоединяющейся полосы движения. В этом случае, чем выше ограничение скорости, тем ближе конечная точка. Кроме того, конечная точка может быть изменена в соответствии с шириной проезжей части присоединяющейся полосы движения. В этом случае, чем меньше ширина дороги, тем ближе конечная точка. В любом случае можно уменьшить страх людей, занимающих место в транспортном средстве. Кроме того, конечная точка может быть точкой, проходящей в направлении движения на заранее определенное расстояние от начальной точки.
[0084] В этом варианте осуществления в ситуации, когда рассматриваемое транспортное средство выезжает на дорогу от объекта на обочине дороги, контроллер устанавливает начальную точку области, в которой точки определения управления плотно установлены в положение перед положением, в котором полоса движения места назначения при выезде и первый маршрут пересекаются друг с другом или в положении, в котором тротуар и первый маршрут пересекаются друг с другом, когда между объектом и дорогой есть тротуар. В результате появляется возможность надежно переключаться на участке, где может возникнуть необходимость переключения определения. Кроме того, начальная точка может быть точкой непосредственно перед конечной точкой на заранее определенное расстояние. Кроме того, начальная точка может быть установлена по слепой зоне, когда дорога просматривается со стороны объекта на обочине дороги. Например, когда на полосе движения с передней стороны находится припаркованный автомобиль в ситуации, показанной на фиг. 6, и мертвая зона становится больше по мере приближения рассматриваемого транспортного средства A к дороге, начальная точка устанавливается на переднюю сторону.
[0085] В этом варианте осуществления контроллер устанавливает интервалы между точками определения управления в области, в которой точки определения управления плотно установлены, так, что контролируемые диапазоны соседних точек определения управления перекрывают друг друга или допустимые диапазоны позиционного отклонения соседние точки определения управления перекрывают друг друга. В результате, когда рассматриваемое транспортное средство находится в ситуации, требующей остановки, рассматриваемое транспортное средство может быть остановлено в желаемом положении. Интервалы между соседними точками определения управления могут быть одинаковыми или разными.
[0086] В этом варианте осуществления длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения являются произвольными значениями, установленными в соответствии с точностью управления системы управления. Следовательно, интервалы между точками определения управления могут быть установлены соответствующим образом.
[0087] В этом варианте осуществления длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения могут быть разными для каждой из точек определения управления. Следовательно, точки определения управления могут быть соответствующим образом расположены в соответствии с событием.
[0088] В этом варианте осуществления длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения могут быть изменены в соответствии с величиной сопротивления дорожного покрытия. Следовательно, точки определения управления могут быть соответствующим образом расположены в соответствии с условиями дорожного покрытия.
[0089] В этом варианте осуществления, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, контроллер устанавливает точку определения управления только в том месте, где он необходимо для определения, двигаться или останавливать рассматриваемое транспортное средство на первом маршруте, по которому движется рассматриваемое транспортное средство, с использованием информации о ситуации движения. Соответственно, количество точек определения управления необязательно увеличивается, и, таким образом, вычислительная нагрузка может быть уменьшена.
[0090] В этом варианте осуществления, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, контроллер может устанавливать точки определения управления через заранее определенные фиксированные интервалы в первом маршруте, по которому движется рассматриваемое транспортное средство. Таким образом, количество точек определения управления не увеличивается без необходимости, и, таким образом, вычислительная нагрузка может быть уменьшена.
[0091] В этом варианте осуществления, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, контроллер устанавливает точки определения управления в соответствии со скоростью транспортного средства. рассматриваемого транспортного средства таким образом, что чем выше скорость транспортного средства, тем шире интервал на первом маршруте, по которому движется рассматриваемое транспортное средство. Это связано с тем, что чем выше скорость транспортного средства, тем выше вероятность того, что транспортное средство движется прямо с постоянной скоростью транспортного средства, а когда транспортное средство движется прямо с постоянной скоростью транспортного средства, частота пересечений с другим транспортным средством или пешеходом является низкой. Соответственно, поскольку точки определения управления устанавливаются в соответствии со скоростью транспортного средства рассматриваемого транспортного средства, то есть вероятностью пересечения с другим транспортным средством или пешеходом, можно предотвратить излишнее увеличение точек определения управления и снизить вычислительную нагрузку.
[0092] Кроме того, в этом варианте осуществления был описан случай, когда маршрут рассматриваемого транспортного средства и маршрут другого транспортного средства или пешехода пересекаются, но эффективно обеспечить диапазон, в котором точки определения управления плотно установлены даже в других случаях. Например, как показано на фиг. 8, когда рассматриваемое транспортное средство движется прямо через пересечение, точки определения управления могут быть плотно установлены до и после пересечения. Соответственно, при изменении ситуации на пересечении можно гибко реагировать на это изменение.
[0093] Хотя вариант осуществления настоящего раскрытия был описан выше, вышеупомянутый вариант осуществления является просто частью примеров применения настоящего раскрытия и не означает, что технический объем настоящего раскрытия ограничен конкретной конфигурацией вышеописанного варианта осуществления.
Устанавливают точку определения управления (CP0-CP7) на первом маршруте (R1), по которой движется рассматриваемое транспортное средство (A). Точка определения управления (CP0-CP7) определяет, следует ли осуществлять движение или остановить рассматриваемое транспортное средство (A), с использованием информации о ситуации движения. Определяют, следует ли осуществлять движение или остановить рассматриваемое транспортное средство (A) в точке определения управления (CP0-CP7), прежде чем рассматриваемое транспортное средство (A) достигнет точки определения управления (CP0-CP7). Определяют на основе информации о ситуации движения, выезжает ли рассматриваемое транспортное средство (A) на дорогу, по которой другое транспортное средство (B) или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством (A) при движении по первому маршруту (R1), по которому движется рассматриваемое транспортное средство (A). В случае, когда определено, что рассматриваемое транспортное средство (A) выезжает на дорогу, по которой другое транспортное средство (B) или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством (A), устанавливают точки определения управления (CP0-CP7) более плотно, чем в других случаях. Предложено также устройство для определения действия транспортного средства. Достигается предоставление способа для определения действия движения, который может гибко реагировать на изменение ситуации. 2 н. и 15. з.п. ф-лы, 8 ил.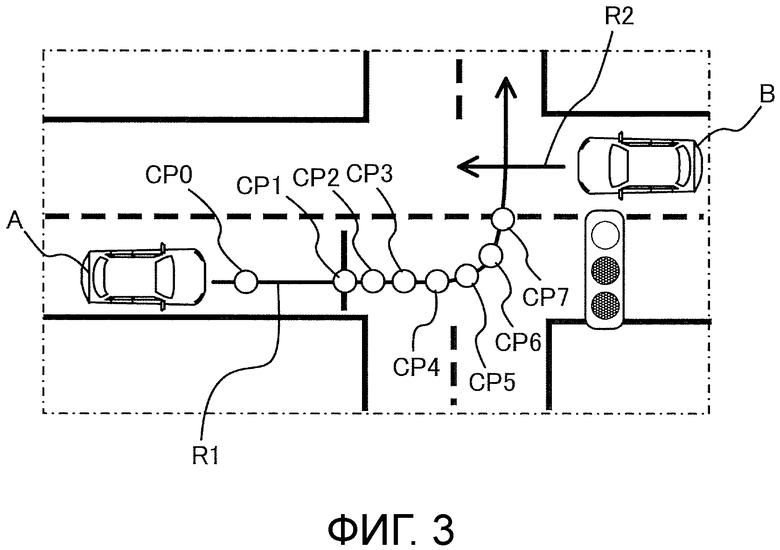
1. Способ определения действия транспортного средства, применимый к устройству управления движением, содержащий:
посредством контроллера, выполненного с возможностью получения информации о ситуации движения дороги, по которой движется рассматриваемое транспортное средство, обнаруженной датчиком, и определения действия движения на основе информации о ситуации движения,
установку по меньшей мере одной точки определения управления на первом маршруте, по которой движется рассматриваемое транспортное средство при движении по первому маршруту, причем точка определения управления определяет, следует ли осуществлять движение или остановить рассматриваемое транспортное средство, с использованием информации о ситуации движения; и
определение того, следует ли осуществлять движение или остановить рассматриваемое транспортное средство в точке определения управления, прежде чем рассматриваемое транспортное средство достигнет точки определения управления,
при этом:
контроллер дополнительно выполнен с возможностью:
определения на основе информации о ситуации движения, выезжает ли рассматриваемое транспортное средство на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством при движении по первому маршруту, по которому движется рассматриваемое транспортное средство; и
в случае, когда определено, что рассматриваемое транспортное средство выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установки точек определения управления более плотно, чем в других случаях.
2. Способ определения действия транспортного средства по п. 1, дополнительно содержащий:
посредством контроллера,
извлечение пересечения между первым маршрутом и дорогой, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством; и
плотную установку точек определения управления с привязкой к пересечению.
3. Способ определения действия транспортного средства по п. 2, дополнительно содержащий:
плотную установку контроллером точек определения управления между рассматриваемым транспортным средством и пересечением.
4. Способ определения действия транспортного средства по п. 3, дополнительно содержащий:
установку контроллером начальной точки области, в которой точки определения управления плотно установлены в начальном положении точки пересечения, в которой первый маршрут пересекается с дорогой, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством.
5. Способ определения действия транспортного средства по п. 3 или 4, дополнительно содержащий:
установку контроллером конечной точки области, в которой точки определения управления плотно установлены, в положении, в котором первый маршрут пересекается с другим транспортным средством или пешеходом.
6. Способ определения действия транспортного средства по п. 5, дополнительно содержащий:
установку контроллером начальной точки области, в которой точки определения управления плотно установлены в начальной точке операции смены полосы движения или операции присоединения, когда рассматриваемое транспортное средство выполняет смену полосы движения на другую полосу движения.
7. Способ определения действия транспортного средства по п. 1, дополнительно содержащий:
в случае, когда рассматриваемое транспортное средство выезжает на дорогу от объекта на обочине дороги, обеспечение контроллером области для плотной установки точек определения управления перед дорогой места назначения при выезде.
8. Способ определения действия транспортного средства по п. 7, дополнительно содержащий:
установку контроллером конечной точки области, в которой точки определения управления плотно установлены, в положении, в котором дорога места назначения при выезде пересекается с первым маршрутом.
9. Способ определения действия транспортного средства по п. 8, дополнительно содержащий:
установку контроллером начальной точки области, в которой точки определения управления плотно установлены, в положении перед положением, в котором полоса движения места назначения при выезде и первый маршрут пересекаются друг с другом, или положении, в котором тротуар и первый маршрут пересекаются друг с другом, когда между объектом и дорогой есть тротуар.
10. Способ определения действия транспортного средства по любому из пп. 1-9, дополнительно содержащий:
установку контроллером интервалов между точками определения управления в области, в которой точки определения управления плотно установлены, так, что контролируемые диапазоны соседних точек определения управления перекрывают друг друга или допустимые диапазоны позиционного отклонения соседних точек определения управления перекрывают друг друга.
11. Способ определения действия транспортного средства по п. 10, в котором
длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения - произвольные значения, устанавливаемые в соответствии с точностью управления системы управления.
12. Способ определения действия транспортного средства по п. 10 или 11, в котором
длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения делаются разными для каждой из точек определения управления.
13. Способ определения действия транспортного средства по любому из пп. 10-12, в котором
длина контролируемых диапазонов и длина допустимых диапазонов позиционного отклонения изменяются в соответствии с величиной сопротивления дорожного покрытия.
14. Способ определения действия транспортного средства по любому из пп. 1-13, дополнительно содержащий:
в случае, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установку посредством контроллера точки определения управления только в том месте, где она необходима для определения, двигаться или останавливать рассматриваемое транспортное средство на первом маршруте, по которому движется рассматриваемое транспортное средство, с использованием информации о ситуации движения.
15. Способ определения действия транспортного средства по любому из пп. 1-14, дополнительно содержащий:
в случае, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установку посредством контроллера точки определения управления через заранее определенные фиксированные интервалы на первом маршруте, по которому движется рассматриваемое транспортное средство.
16. Способ определения действия транспортного средства по любому из пп. 1-15, дополнительно содержащий:
в случае, когда контроллер определяет, что рассматриваемое транспортное средство не выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установку посредством контроллера точки определения управления в соответствии со скоростью транспортного средства рассматриваемого транспортного средства, так что интервалы становятся шире по мере того, как скорость транспортного средства рассматриваемого транспортного средства становится выше на первом маршруте, по которому движется рассматриваемое транспортное средство.
17. Устройство для определения действия транспортного средства, применимое к устройству управления движением, содержащее:
контроллер, выполненный с возможностью получения информации о ситуации движения дороги, по которой движется рассматриваемое транспортное средство, обнаруженной датчиком, и определения действия движения на основе информации о ситуации движения; при этом
контроллер дополнительно выполнен с возможностью:
установки по меньшей мере одной точки определения управления на первом маршруте, по которой движется рассматриваемое транспортное средство при движении по первому маршруту, причем точка определения управления определяет, следует ли осуществлять движение или остановить рассматриваемое транспортное средство, с использованием информации о ситуации движения;
определения, двигаться или останавливать рассматриваемое транспортное средство в точке определения управления, прежде чем рассматриваемое транспортное средство достигнет точки определения управления;
определения, с использованием информации о ситуации движения, выезжает ли рассматриваемое транспортное средство на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством по первому маршруту, по которому движется рассматриваемое транспортное средство; и
в случае, когда определено, что рассматриваемое транспортное средство выезжает на дорогу, по которой другое транспортное средство или пешеход движется или идет с приоритетом над рассматриваемым транспортным средством, установки точек определения управления более плотно, чем в других случаях.
| JP2017111575 A, 22.06.2017 | |||
| WO2017013750 A1, 26.01.2017 | |||
| WO2017126249 A1, 27.07.2017. |

