Область техники, к которой относится изобретение
Настоящее изобретение относится к радиотехнике, и, более конкретно, к антенной решетке миллиметрового диапазона для радиолокационной системы трехмерной визуализации.
Уровень техники
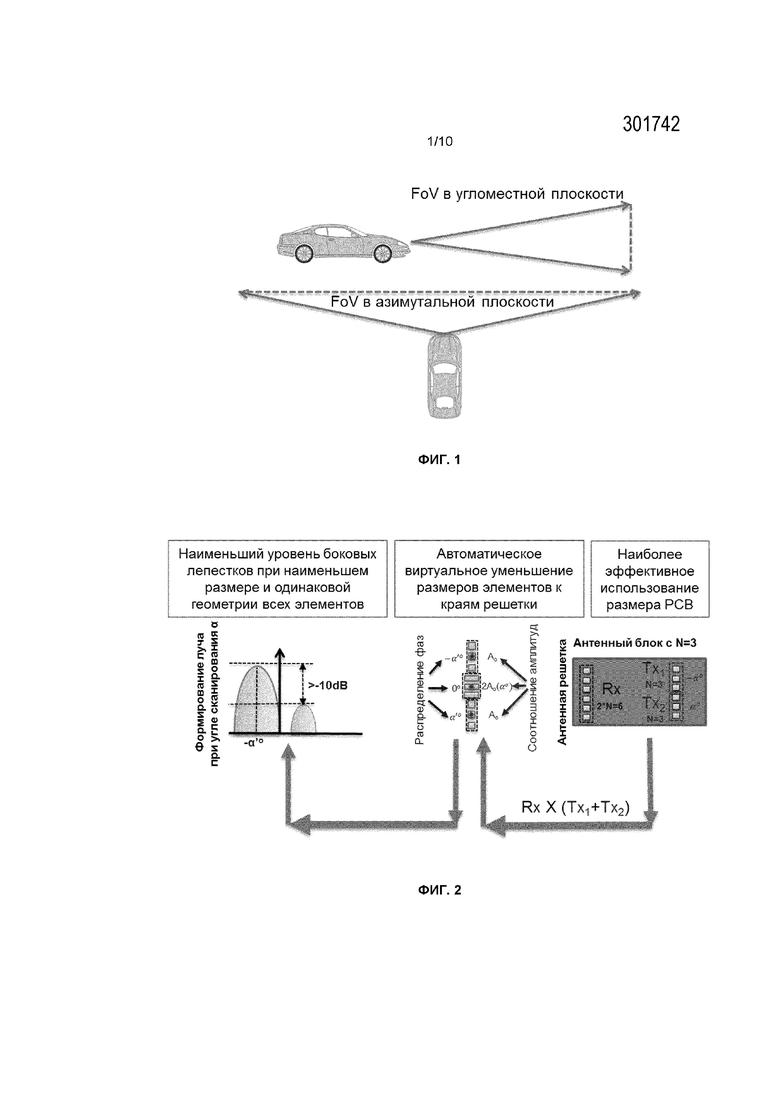
Радиолокационная система трехмерной визуализации (3D радар) является одним из ключевых датчиков для автомобильной навигации. Главной функциональной возможностью 3D радара является предоставление разрешения объектов не только в азимутальной плоскости (горизонтали), но и в угломестной плоскости (вертикальной).
Следует отметить, что разрешением антенны (или 3D радара) в данном раскрытии считается ширина луча диаграммы направленности антенной решетки по уровню половинной мощности от максимального значения, или по уровню -3 децибела от максимума в децибельной системе отсчета. Полем обзора (FoV) антенны в данном раскрытии считается диапазон углов, в которых антенна может эффективно выполнять сканирование, сохраняя свои характеристики на приемлемом уровне.
Как показано на Фиг. 1, традиционный (двухмерный радар, 2D) радар предоставляет возможность определять расстояние до цели и направление на нее только в азимутальной (горизонтальной) плоскости при широком FoV (около 80-120 градусов). Трехмерный (3D) радар при таком же широком FoV в азимутальной плоскости не требует широкого FoV в угломестной плоскости для автомобильной навигации: достаточно 10-20 градусов для анализа ситуации в угломестной плоскости для различных типов применений радара -для средней, для малой, для большой дальности.
Основной проблемой для реализации радара с высоким разрешением является количество передатчиков и приемников. Для уменьшения числа требуемых передатчиков и приемников используется конфигурация антенной решетки MIMO. MIMO (множество входов - множество выходов) - метод пространственного кодирования сигнала, позволяющий увеличить полосу пропускания канала, в котором передача данных и прием данных осуществляются системами из нескольких антенн. Передающие и приемные антенны разносят так, чтобы корреляция между соседними антеннами была слабой. Из уровня техники известна конфигурация антенной решетки MIMO для азимутальной плоскости для 2D радаров. В то же время наиболее оптимизированная конфигурация MIMO (виртуальной) антенной решетки для угломестной плоскости для 3D радара до сих пор не предложена в уровне техники.
Известные из уровня техники виртуальные антенные решетки для 3D радара сталкиваются со следующими проблемами:
- Ограниченное число каналов Tx/Rx (передачи/приема) приемопередатчика приводит к низкому разрешению и, как следстиве, к небольшому соотношению поля обзора к разрешению (FoV/разрешение);
- Различные применения радара требуют различных характеристик для обеспечения должного соотношения FoV и разрешения, что приводит к тому, что требуется изготовление большого разноообразия антенных решеток и устройств;
- Неоптимизированное расположение антенных элементов приводит к избыточному использованию требуемой поверхности;
- Для уменьшения уровня боковых лепестков используется технология уменьшения поперечного размера излучателя к краям решетки относительно центральных элементов (tapering). Для достижения лучшего результата требуется выдерживать достаточно точное соотношение между попреречными размерами элементов. Таким образом, в линейной антенной решетке возрастают требования к технологическим допускам и проектированию.
В частности, среди аналогов настоящего изобретения в уровне техники известны следующие решения.
1) US 7,362,259 B2, 22-04-2008, ʺRadar antenna arrayʺ, Gottwald Frank, Robert Bosch GmbH.
В данном решении для подавления боковых лепестков в импульсных радиолокационных системах (радарах) характеристики передающей антенны и приемной антенны сконструированы таким образом, что доминирующие боковые лепестки оказываются взаимно смещенными, и их максимумы и минимумы взаимно подавляются. Это снижает вероятность обнаружения ложных целей.
Данное решение имеет следующие недостатки:
- Боковые лепестки оптимизированы лишь в одном узком направлении;
- Возможности сканирования не предполагаются: описаны лишь один приемопередатчик и один приемник;
- Применяется только для обнаружения объекта в области луча с маскировкой от ложных целей.
2) US 8,624,775 B2, 07-01-2014, ʺRadar apparatus and antenna deviceʺ, Inami Kazuyoshi et al., Mitsubishi Electric Corp./Denso Corp.
В данном решении описывается антенная решетка, содержащая с одной стороны четыре ряда линейных решеток, расположенных с равными интервалами в вертикальном направлении и расположенных с заданным интервалом в горизонтальном направлении. Эти решетки образуют каналы передачи, а остальные двенадцать рядов, расположенных с другой стороны, образуют группу каналов приема. Среди остальных двенадцати рядов четыре ряда линейных решеток в центре образуют первую приемную решетку, в которой каждый ряд установлен как канал. Восемь рядов линейных решеток с обеих сторон образуют вторую приемную решетку, в которой каждые два ряда установлены как канал.
Данное решение имеет следующие недостатки:
- Виртуальное формирование луча реализуется через определенные подрешетки;
- Требуется не менее 8 каналов для реализации.
3) US 2016/0285172 A1, 29-09-2016, ʺRadar deviceʺ, Kishigami Takaaki et al., Panasonic Corp.
В данном решении описывается передающая антенная решетка и приемная антенная решетка. Каждая из них включает в себя множество элементов-подрешеток, при этом элементы-подрешетки в передающей антенной решетке и приемной антенной решетке расположены линейно в первом направлении, причем каждый элемент-подрешетка включает в себя множество антенных элементов, элемент-подрешетка имеет размер больше, чем заданное расстояние между антенными элементами в первом направлении, а абсолютное значение разности между расстоянием между элементами-подрешетками передающей антенны и расстоянием между элементами-подрешетками приемной антенной решетки равно заданному расстоянию между антенными элементами.
Данное решение имеет следующие недостатки:
- Неэффективное использование поверхности;
- Передатчик и приемник имеют одинаковую конфигурацию. Виртуальное уменьшение размеров излучателей к краям решетки реализуется за счет разных расстояний между элементами.
4) US 9,541,639 B2, 10-01-2017, ʺMIMO antenna with elevation detectionʺ, Searcy James F et al., Delphi Technologies, Inc.
В данном решении описывается антенна с множеством входов и множеством выходов (MIMO) для радиолокационной системы, которая включает в себя приемную антенну, первое устройство передающей антенны и второе устройство передающей антенны. Приемная антенна сконфигурирована для обнаружения радиолокационных сигналов, отраженных целью в направлении приемной антенны. Второе устройство передающей антенны вертикально смещено относительно первого устройства передающей антенны на расстояние вертикального смещения, выбранное таким образом, чтобы угол места до цели мог быть определен приемной антенной.
Данное решение имеет следующие недостатки:
- Применяется только для отслеживания объектов в угломестной плоскости, но не для трехмерной визуализации
- Отсутствие возможности сканирования в угломестной плоскости
- Нет оптимизации для уровня боковых лепестков
Таким образом, в уровне техники сформировалась потребность в создании 3D радара с высоким разрешением и возможностью сканирования и в азимутальной, и в угломестной плоскостях. Как показано выше, известные технологии не подходят для разработки такого типа устройств.
Сущность изобретения
С целью устранения по меньшей мере некоторых из вышеупомянутых недостатков предшествующего уровня техники, настоящее изобретение направлено на создание антенной решетки для 3D радара.
Согласно настоящему изобретению предложена антенная решетка, содержащая: M последовательно расположенных первых линейных антенных решеток, каждая из которых содержит 2N антенных элементов, где M и N - натуральные числа, и 2M последовательно расположенных вторых линейных антенных решеток, размещенных напротив упомянутых первых решеток, причем каждая из вторых решеток содержит N антенных элементов, причем расстояние между антенными элементами в каждой из первых и вторых решеток является одинаковым, причем каждая из первых и вторых решеток подключена к соответствующему порту управляющей схемы и выполнена с возможностью управления фазой и амплитудой со стороны управляющей схемы, с тем чтобы формировать диаграмму направленности с требуемыми характеристиками, на каждом их которых причем каждый из портов управляющей схемы выполнен с возможностью устанавливать свои параметры амплитуды и начальной фазы сигнала, причем первыми решетками являются приемные (Rx) или передающие (Tx) решетки, а вторыми решетками являются, соответственно, передающие (Tx) или приемные (Rx) решетки.
В одном из вариантов осуществления антенные элементы выполнены на печатной плате.
В одном из вариантов осуществления антенные элементы выполнены в виде патчей, круглых патчей или щелей.
В одном из вариантов осуществления антенная решетка дополнительно содержит управляющую схему.
В одном из вариантов осуществления упомянутые первые и вторые линейные антенные решетки являются частью антенны MIMO (со множеством входов и множеством выходов), содержащей несколько рядов Rx линейных решеток и несколько рядов Tx линейных решеток.
В одном из вариантов осуществления управление фазой и амплитудой первых и вторых решеток выполняется так, чтобы при перемножении линий первых и вторых решеток происходило формирование виртуальной линейной антенной решетки с уменьшением размеров излучателей к ее краям.
Настоящее изобретение обеспечивает простой, универсальный и недорогой радар, который способен работать в миллиметровом диапазоне (мм-диапазоне), демонстрируя при этом улучшенные характеристики по сравнению с решениями, известными из уровня техники, а именно:
- Максимальное разрешение при минимальном числе приемопреедатчиков;
- Максимальное соотношение FoV/разрешение при минимальном числе приемопередатчиков;
- Многофункциональность и упрощенная масштабируемость для выбора требуемого соотношения FoV/разрешение или реализации многорежимного радара;
- Наименьший возможный размер устройства за счет наиболее эффективного использования поверхности;
- Упрощенная конструкция и сниженная чувствительность к технологическим допускам за счет виртуального уменьшения размеров излучателей к краям решетки, которое позволяет выполнять все антенные элементы в линии одинаковыми.
Краткое описание чертежей
На Фиг. 1 показаны примерные поля обзора для автомобильного радара.
На Фиг. 2 показан вариант осуществления антенны согласно настоящему изобретению.
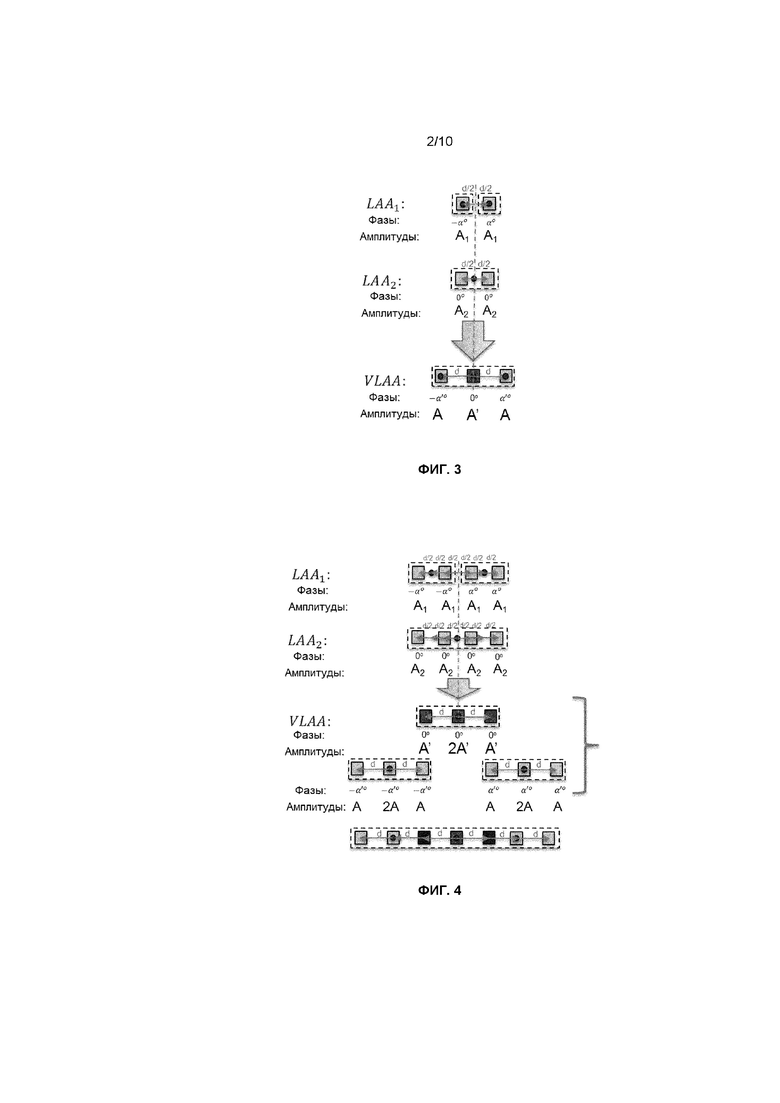
На Фиг. 3 показан принцип работы предлагаемой антенны при n=1.
На Фиг. 4 показан принцип работы предлагаемой антенны при n=2.
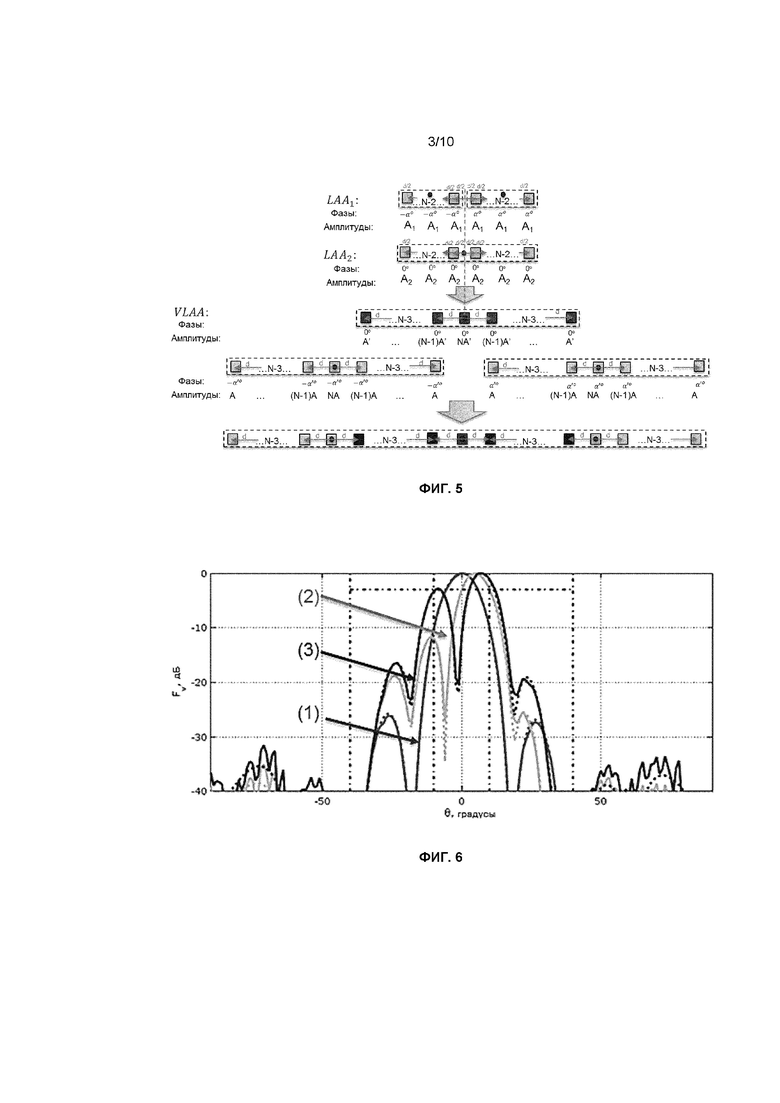
На Фиг. 5 показан принцип работы предлагаемой антенны при n=N.
На Фиг. 6 показаны примерные диаграммы направленности антенны согласно настоящему изобретению.
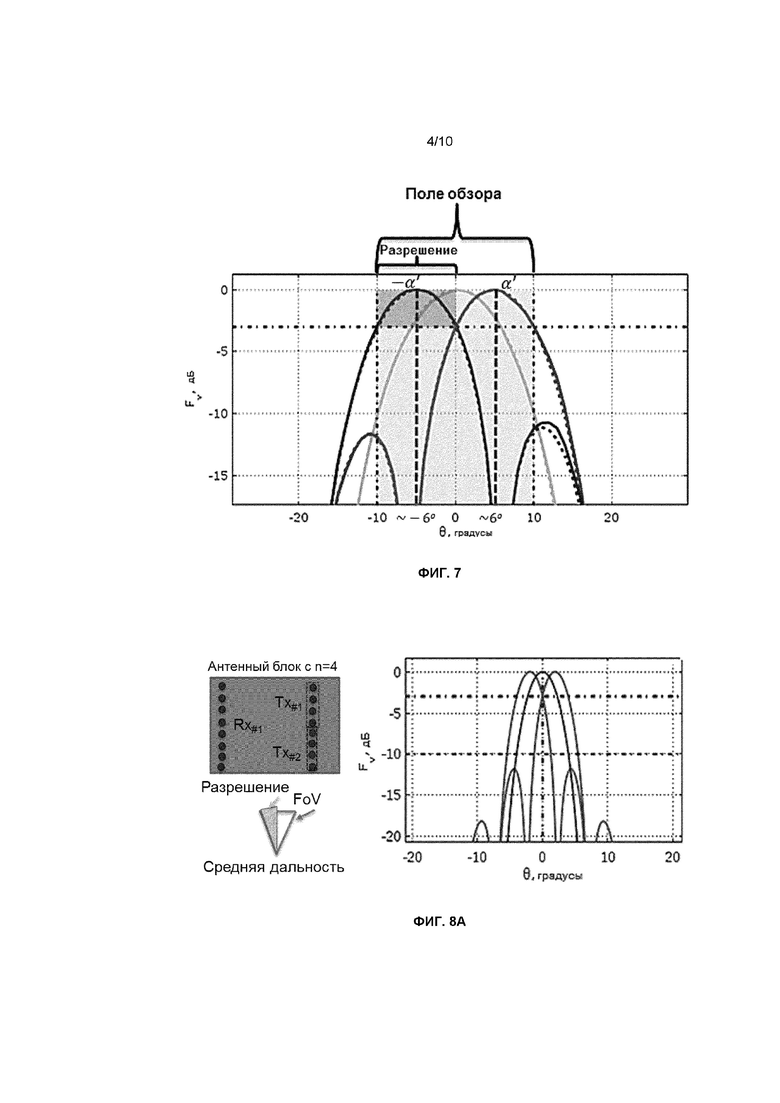
На Фиг. 7 показана результирующая диаграмма направленности предлагаемой антенны для N=3.
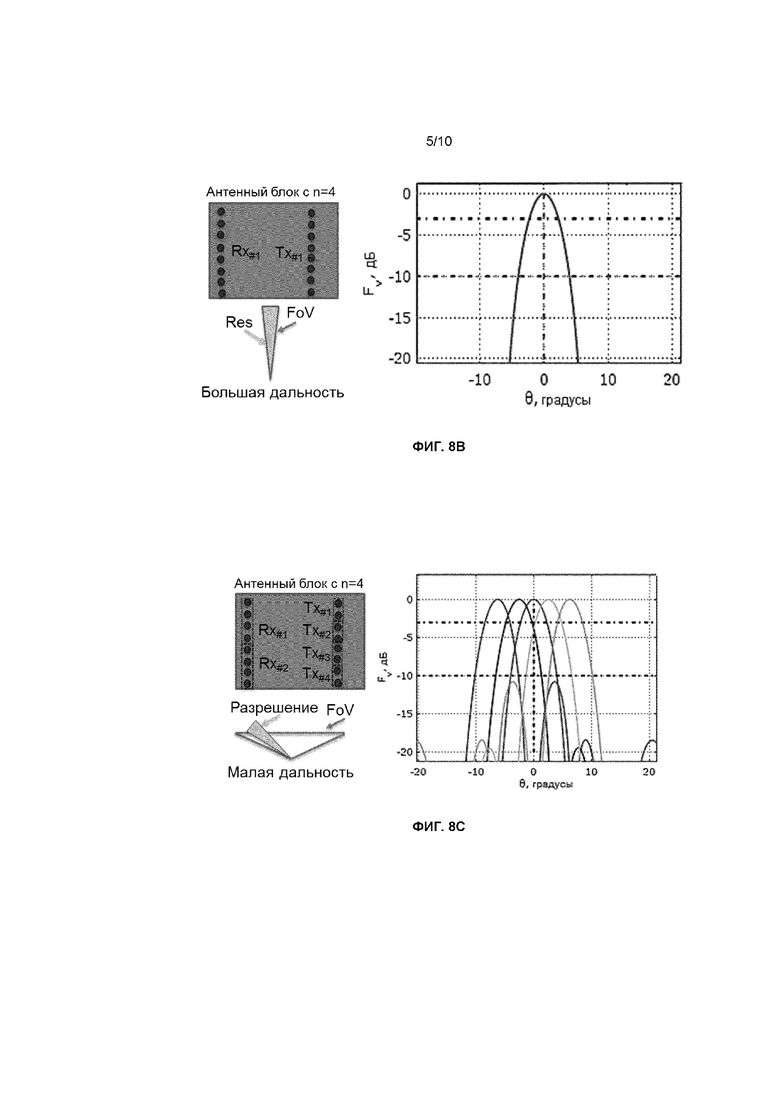
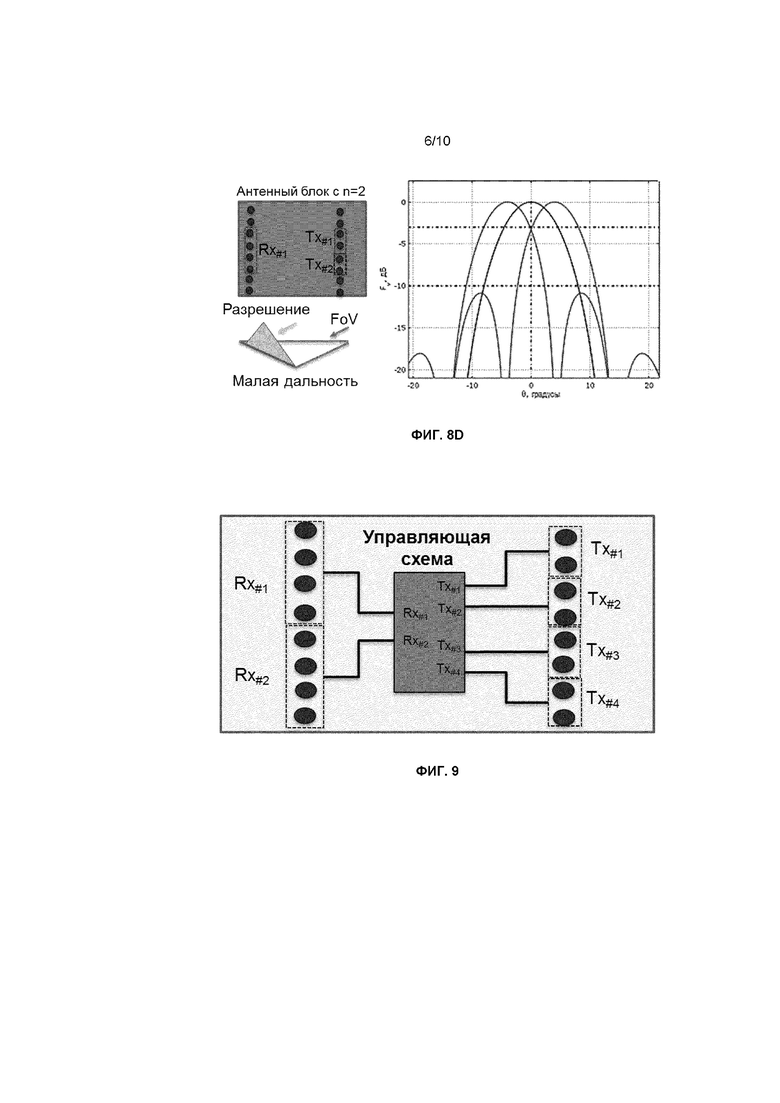
На Фиг. 8A-8D показаны различные варианты комбинирования блоков виртуальной антенной решетки.
На Фиг. 9 показан вариант реализации многорежимного радара.
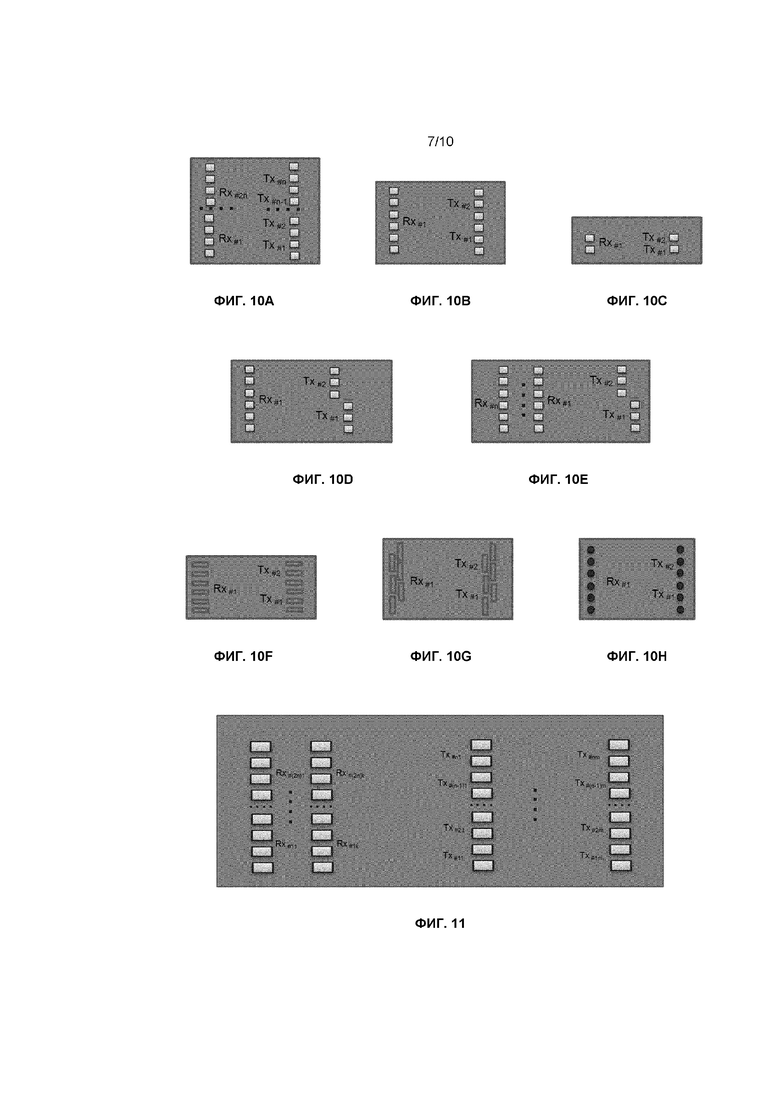
На Фиг. 10 показаны примеры исполнения излучателей.
На Фиг. 11 показан вариант осуществления антенны согласно настоящему изобретению в сочетании с классической MIMO конфигурацией.
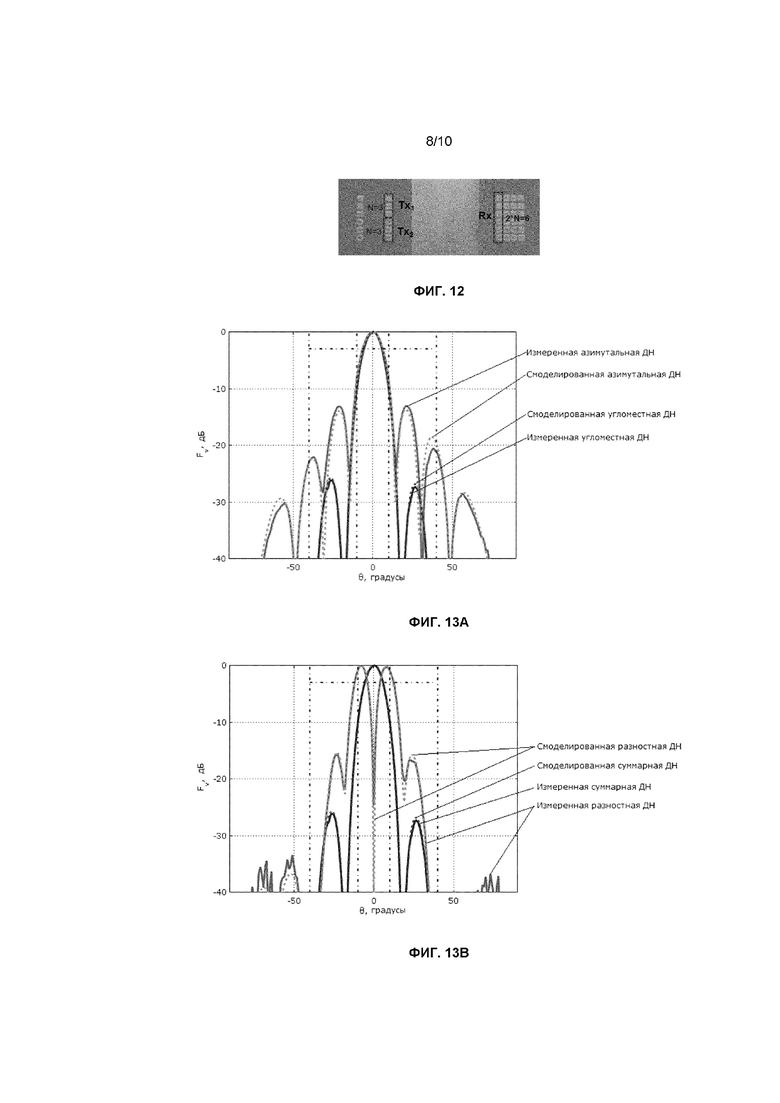
На Фиг. 12 показан образец экспериментальной антенны.
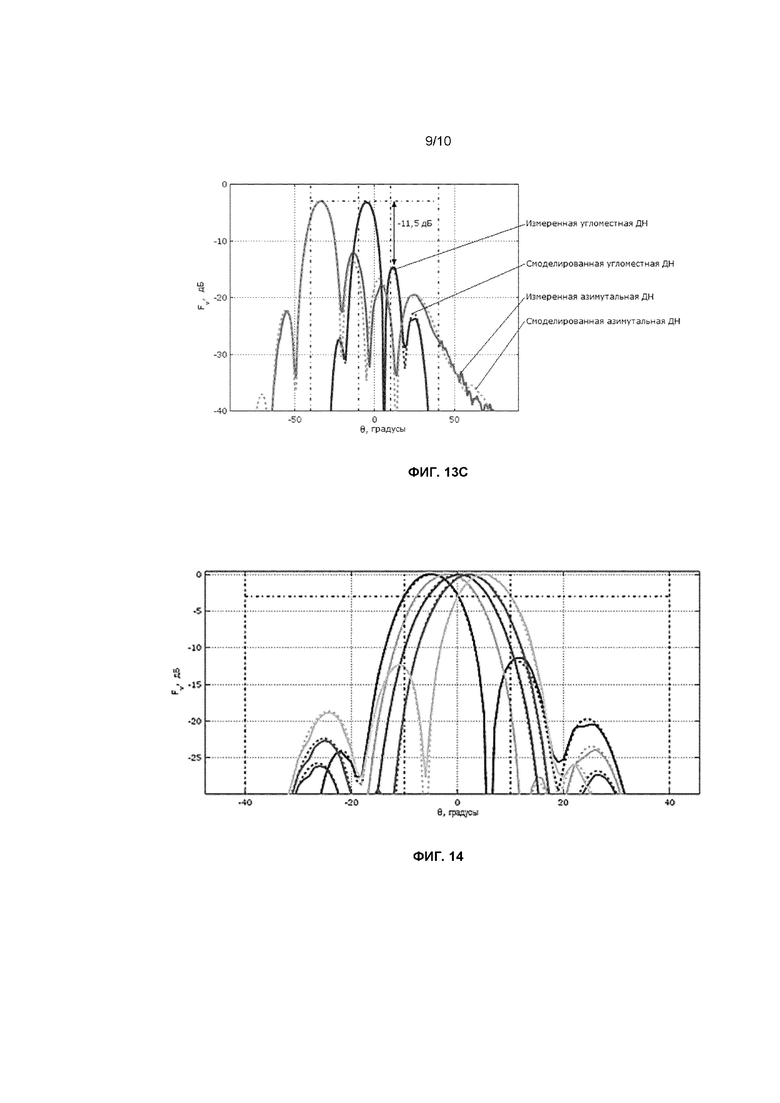
На Фиг. 13A-13C показаны диаграммы направленности, полученные на экспериментальной антенне.
На Фиг. 14 показаны диаграммы направленности, полученные при сканировании на экспериментальной антенне.
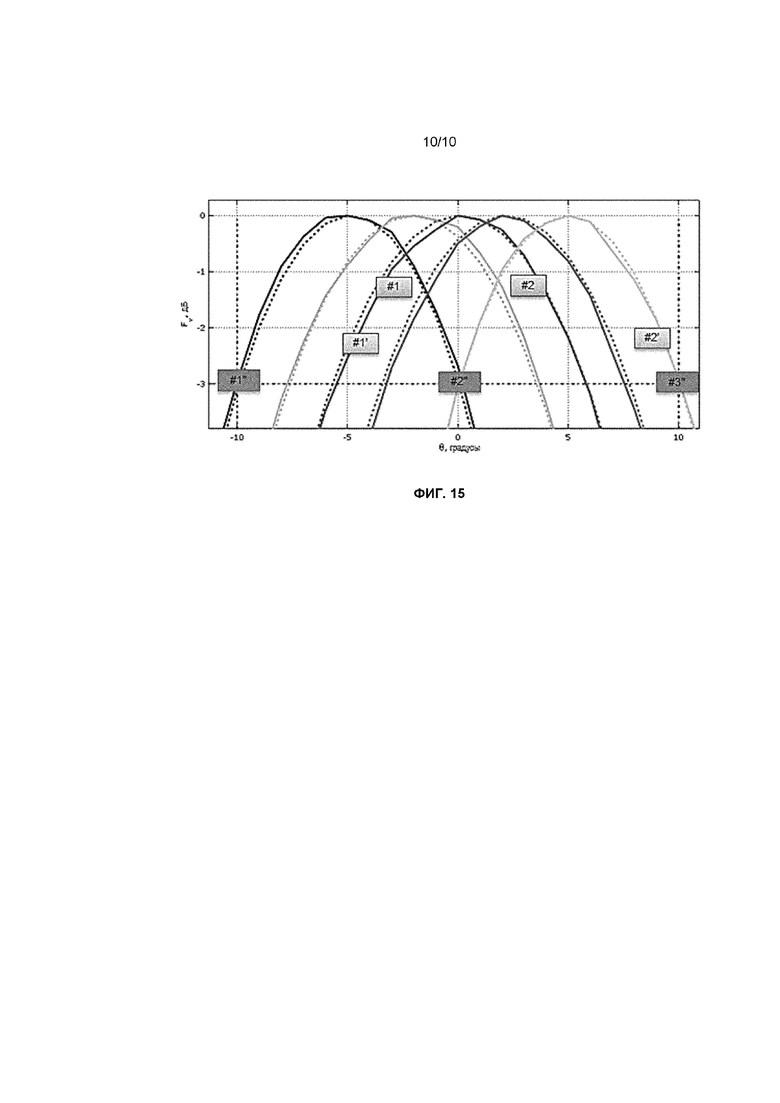
На Фиг. 15 показаны результаты проверки разрешающей способности экспериментальной антенны.
Подробное описание
В одном из вариантов осуществления настоящего изобретения предлагается блок виртуальной антенной решетки, который содержит одну приемную (Rx) линейную антенную решетку (LAA) с 2N антенными элементами и расположенные напротив нее две передающие (Tx1 и Tx2) LAA с N антенными элементами в каждой, где N - натуральное число. В примере на Фиг. 2 показана решетка с N=3, где Rx LAA имеет 2*3=6 антенных элементов, а каждая из двух Tx LAA имеет по 3 антенных элемента. Эквивалентная схема для такого набора из трех LAA представляет собой виртуальную антенную решетку (VLAA), которая определяется как Rx LAA * ( Tx1 LAA+Tx2 LAA). Точками на фигуре показаны центры фазирования решеток. Антенные элементы изображены в виде квадратов со сплошной границей, а прямоугольники с пунктирной границей представляют линейные антенные решетки.
Следует отметить, что здесь и далее подразумевается, что Rx и Tx LAA могут взаимозаменяться. То есть вместо приемной антенны может использоваться передающая и наоборот.
Полученная MIMO-решетка с возможностью сканирования в угломестной плоскости использует разное количество элементов в приемной и в передающей LAA, реализуя специальное соотношение апертуры. Такой подход позволяет обеспечить максимально возможное соотношение FoV/разрешение виртуальной антенной решетки и наиболее эффективное использование поверхности (апертуры антенны). Так как апертура Rx LAA равна апертуре двух Tx LAA, то предложенная антенная решетка имеет минимально возможный размер в вертикальной плоскости. За счет того, что в полученной антенне уменьшение размеров излучателей к краям решетки происходит автоматически (виртуально), можно выполнять все физические антенные элементы одинаковыми, что обеспечивает низкую чувствительность к технологическим допускам.
На Фиг. 3 показано, как функционирует предлагаемая антенна при n=1. Как и на предыдущей фигуре, точками на данной фигуре показаны центры фазирования решеток. Антенные элементы изображены в виде квадратов со сплошной границей, а прямоугольники с пунктирной границей представляют линейные антенные решетки. Две линейные решетки Tx для удобства показаны на фигуре как подрешетки единой решетки LAA1. Линейная решетка Rx показана как LAA2. Умножение линий антенных решеток LAA1 и LAA2 дает в результате виртуальную линейную антенную решетку VLAA, которая имеет 3 виртуальных элемента на расстоянии d друг от друга.
Первую и вторую линейные решетки можно описать следующим образом:


Результатом их умножения будет являться следующее выражение:
 ,
,
где

Таким образом, получившаяся виртуальная антенная решетка может быть описана так:
 )
)
То есть, в случае фазирования элементов LAA1 с фазой αo (αo до центра фазирования первой подрешетки LAA1 и -αo до центра фазирования второй подрешетки LAA1, и наоборот), чтобы сформировать луч на угле αo, VLAA должна иметь следующее фазовое распределение:
-α'o для 1-го элемента, 0o для 2-го элемента и α'o для 3-го элемента;
и следующее амплитудное распределение:
 для 1-го элемента,
для 1-го элемента,  для 2-го элемента и для 3-го элемента.
для 2-го элемента и для 3-го элемента.
На Фиг. 4 показано, как функционирует предлагаемая антенна при n=2. Для лучшего понимания изобретения результирующая виртуальная решетка показана дважды: выше в пределах фигурных скобок показаны со сдвигом по вертикали три виртуальных подрешетки, из которых состоит виртуальная решетка, а в целом ее эквивалентная конфигурация изображена ниже. Как можно видеть, третий и пятый элементы (показаны в виде элементов с отличающейся от других заливкой) - это перекрывающиеся элементы.
Для данного примера справедливы следующие равенства:

Получившаяся виртуальная антенная решетка может быть описана так:
 )
)
Далее на Фиг. 5 показано, как функционирует предлагаемая антенна при n=N. Умножение линий антенных решеток LAA1 и LAA2 дает в результате виртуальную линейную антенную решетку VLAA, которая имеет 4N-1 виртуальных элемента на расстоянии d друг от друга.
Как и на предыдущей фигуре, результирующая виртуальная решетка показана дважды: выше в ряда показаны со сдвигом по вертикали составляющие виртуальные подрешетки, а в целом ее эквивалентная конфигурация виртуальной решетки изображена ниже.
Для данного примера справедливы следующие равенства:

Получившаяся виртуальная антенная решетка может быть описана так:

)
То есть, в случае фазирования элементов LAA1 с фазой αo (αo до центра фазирования первой подрешетки LAA1 и -αo до центра фазирования второй подрешетки LAA1, и наоборот), чтобы сформировать луч на угле αo, VLAA должна иметь такое амплитудное и фазовое распределение, которое указано в выражении выше.
Примерные диаграммы направленности антенны согласно настоящему изобретению показаны на Фиг. 6. Так, если луч направлен в главном направлении (0 градусов, не отклонен - показано линией (1)), то вышеуказанное уравнение, описывающее работу VLAA, можно упростить до
 ).
).
Полученная VLAA работает как антенная решетка с уменьшением размеров излучателей к краям: расположенный посередине элемент имеет наибольшую амплитуду пропорционально 2N. Крайние элементы имеют самую низкую амплитуду пропорционально 1. Это идеально подходит для радара слежения, когда необходимо отслеживать положение в угломестной плоскости одной цели.
Если луч отклонен на угол α' (показано линией (2)), то вышеуказанное уравнение, описывающее работу VLAA, можно упростить до
 )
)
Таким образом, при отклонении на α' полученная VLAA работает как антенная решетка с 3-фазными элементами, находящимися на расстоянии d друг от друга, что обеспечивает минимальный уровень боковых лепестков и максимальное соотношение FoV/разрешение.
Если луч отклонен больше чем на угол α' (показано линией (3)), то вышеуказанное уравнение, описывающее работу VLAA, можно упростить до
 )
)
При таком отклонении полученная VLAA работает как антенная решетка со значительным ухудшением амплитуды центральных элементов. Это приводит к значительному росту боковых лепестков и делает 3D радар нерабочим при углах, превышающих α'.
Далее приводится расчет FoV, разрешения, угла α' и возможности сканирования. Как следует из случая (2) с отклонением луча на угол α' на Фиг., допустимый уровень боковых лепестков при сканировании составляет 1. Таким образом, должно выполняться равенство  .
.
Это означает, что  или
или  .
.
В случае  угол α' примет значение
угол α' примет значение  .
.
Ширина луча в таком случае составит  .
.
Соотношение FoV/разрешение=2.
Примерные результаты расчета для разных N сведены в таблицу 1. Для удобства понимания результаты округлены.
Таблица 1
Кроме того, результирующая диаграмма направленности для конкретного случая с N=3 изображена на Фиг. 7.
Выше в настоящем раскрытии был описан блок виртуальной антенной решетки. Объединяя несколько таких блоков виртуальной антенной решетки путем их последовательного добавления друг к другу, можно получить любое желаемое FoV и разрешение в угломестной плоскости, по-прежнему сохранив характеристику виртуального уменьшения размеров излучателей к краям решетки, присущую одиночному блоку с N=1. Таким образом, для обеспечения более высокого разрешения и/или более широкого FoV достаточно всего лишь поставить в ряд несколько одинаковых блоков вместо того, чтобы проектировать новую антенну, удовлетворяющую заданным требованиям. Соответственно, обеспечивается упрощенное масштабирование антенны.
Кроме того, имея одинаковую антенну, состоящую из нескольких блоков виртуальной антенной решетки, можно управлять фазой имеющихся антенных элементов (включением в фазе и противофазе друг относительно друга) и их амплитудой (включением и выключением), все еще сохраняя характеристику виртуального уменьшения размеров излучателей к краям решетки, и тем самым составлять различные комбинации FoV и разрешения без изменения геометрии линий и элементов. То есть масштабирование антенны согласно настоящему изобретению может выполняться как в сторону увеличения, так и в сторону уменьшения. Более того, появляется возможность обеспечения многорежимного радара в рамках одного и того же устройства (на одной плате).
На фигурах 8A-8D показаны различные варианты комбинирования блоков виртуальной антенной решетки, имеющей 8 Rx-элементов и 8 Tx-элементов, для получения различных сочетаний FoV и разрешения.
В частности, на Фиг. 8A проиллюстрирован вышеописанный вариант, в котором сформирована одна линейная решетка Rx с 2*4=8 элементами и две линейных решетки Tx с 4 элементами в каждой (далее в настоящем документе - Исполнение 1). Здесь обеспечивается соотношение FoV/разрешение=2, и при этом коэффициент усиления относительно высок. Такое исполнение подходит для применения в качестве радара средней дальности.
На Фиг. 8B проиллюстрирован вариант, в котором из имеющихся 8 Rx-элементов и 8 Tx-элементов сформирована одна линейная решетка Rx с 2*4=8 элементами и одна линейная решетка Tx с 8 элементами (далее в настоящем документе - Исполнение 2). Здесь обеспечивается соотношение FoV/разрешение=1, то есть сканировать такая антенна не может, зато при этом обеспечивается более высокий коэффициент усиления. Такое исполнение подходит для применения в качестве радара большой дальности для отслеживания одной цели.
На Фиг. 8C проиллюстрирован вариант, в котором из имеющихся 8 Rx-элементов и 8 Tx-элементов сформировано две линейных решетки Rx с 2*2=4 элементами в каждой и четыре линейных решетки Tx с 2 элементами в каждой (далее в настоящем документе - Исполнение 3). Здесь обеспечивается большее соотношение FoV/разрешение и меньший коэффициент усиления. Такое исполнение подходит для применения в качестве радара малой дальности.
В приведенных выше трех вариантах осуществления задействованы все 8 Rx-элементов и 8 Tx-элементов, и можно заметить, что разрешение (ширина луча диаграммы направленности) в них сохраняется одинаковым. На Фиг. 8D проиллюстрирован вариант, в котором из имеющихся 8 Rx-элементов и 8 Tx-элементов сформирована одна линейная решетка Rx с 2*2=4 элементами и две линейных решетки Tx с 2 элементами в каждой (далее в настоящем документе - Исполнение 4). Остальные 4 Rx-элемента и 4 Tx-элемента не задействованы (выключены). Как и в Исполнении 3, здесь обеспечивается большое FoV и небольшой коэффициент усиления. Разрешение при этом увеличено, поэтому соотношение FoV/разрешение здесь несколько меньше, чем в Исполнении 3. Такое исполнение также подходит для применения в качестве радара малой дальности.
Пример того, как именно можно реализовать многорежимный радар, управляя фазой и амплитудой его составляющих антенных элементов, проиллюстрирован на Фиг. 9. Антенные элементы подключены к независимым портам управляющей схемы, которые выполнены с возможностью устанавливать на них свои фазы и амплитуды. От независимых портов управляющей схемы на антенные элементы могут подаваться любые фазы и амплитуды, подходящие для того, чтобы в результате формировалась виртуальная линейная антенная решетка с уменьшением размеров излучателей к ее краям, имеющая требуемую диаграмму направленности с заданным разрешением и отклонением главного луча. Соответствующие вычисления производятся согласно теории антенных решеток.
В частности, в примере на Фиг. 9 к двум независимым Rx-портам управляющей схемы подключены по 4 последовательно расположенных Rx-элемента, а к четырем независимым Tx-портам управляющей схемы подключены по 2 последовательно расположенных Tx-элемента.
Чтобы получить вышеописанные Исполнения 1-4 с помощью такого устройства, необходимо управлять независимыми портами управляющей схемы следующим образом:
Исполнение 1
- Синфазная работа Rx#1 и Rx#2
- Синфазная работа Tx#1 и Tx#2
- Синфазная работа Tx#3 и Rx#4
- Фазирование (Tx#1 и Tx#2) относительно (Tx#3 и Tx#4)
Исполнение 2
- Синфазная работа Rx#1 и Rx#2
- Синфазная работа Tx#1... Tx#4
Исполнение 3
- Фазирование Rx#1 относительно Rx#2
- Фазирование Tx#1... Tx#4
Исполнение 4
- Включить Rx#1/Отключить Rx#2 (или наоборот)
- Фазирование Tx#1 относительно Tx#2/Отключить Tx#3, Tx#4 (или наоборот)
Для реализации блока виртуальной антенной решетки согласно настоящему изобретению допустимо широкое разнообразие различных вариантов осуществления. Примеры таких вариантов осуществления показаны на Фиг. 10. В частности, применимы любые варианты печатных плат без уменьшения размеров патчей к краям решетки в угломестной плоскости. Также применимы любые варианты печатных плат, в которых может быть выделено целое число ячеек и которые содержат, например, 1 линию Rx с 2N антенными элементами и 2 линии Tx с N антенными элементами, или в целом M линий Rx (или Tx) с 2N антенными элементами и 2M линий Tx (или Rx) с N антенными элементами, где M и N - любые натуральные числа. В качестве антенных элементов могут применяться любые возможные антенные элементы: патчи, круглые патчи, щели и т.д.
Также описанная в изобретении MIMO решетка для визуализации объекта в угломестной плоскости может быть использована в сочетании с классической MIMO конфигурацией (показано на Фиг. 11 с k передатчиками и m приемниками) в горизонтальной плоскости для реализации 3D радара.
В целях подтверждения практических характеристик антенны авторами изобретения проведены эксперименты, в ходе которых проверялось формирование диаграммы направленности антенны для N=3: суммарные и разностные диаграммы направленности, цифровое формирование диаграммы направленности. Образец экспериментальной антенны, на которой проводились испытания, показан на Фиг. 12.
Результаты тестирования приведены на Фиг. 13A (суммарная диаграмма направленности, 79 ГГц, главное направление), Фиг. 13B (суммарная и разностная диаграмма направленности в угломестной плоскости, 79 ГГц, для следящего радара), Фиг. 13C (формирование диаграммы направленности в угломестной плоскости и в азимутальной плоскости, 79 ГГц, для 3D радара).
Как можно заметить, предлагаемая виртуальная антенная решетка может использоваться как для следящего радара, так и для 3D радара. Так, для следящего радара уровень боковых лепестков составил -27 дБ. Для 3D радара уровень боковых лепестков в пределах FoV не превышает -10 дБ в угломестной плоскости за счет реализации специального соотношения апертур приемной (приемных) и передающей (передающих) антенн, что составляет суть изобретения.
Также в ходе экспериментов была проверена разрешающая способность предложенной антенны, то есть способность различать разные объекты, находящиеся в пределах поля обзора. Так, например, если два объекта находятся в области главного луча, то они будут восприняты радаром как один и тот же объект. Если же выполнять сканирование лучом, то в определенные моменты времени в зоне действия луча может оказываться лишь один из этих объектов, а второй может становиться «невидимым» для радара, и наоборот, что позволит различить эти объекты друг от друга.
Диаграммы направленности антенны, полученные при сканировании, показаны на Фиг. 14. В частности, показаны 5 положений: с направлением главного луча на -5°, -2,5°, 0°, 2,5°, 5°. На Фиг. 15 изображена часть вышеуказанного графика от уровня 0 дБ до уровня -3 дБ, в пределах которой проверялась способность радара обнаруживать разные объекты.
Выполнены проверки для 3 ситуаций: 1) объекты #1 и #2 расположены вблизи друг от друга на расстоянии менее 10° с точки зрения радара; 2) объекты #1 и #2 расположены относительно далеко друг от друга на расстоянии более 10° с точки зрения радара; 3) объекты #1, #2 и #3 расположены в точках -10°, 0° и 10° с точки зрения радара. Результаты сканирования (число объектов, попавших в зону действия луча) сведены в нижеследующую таблицу 2.
Таблица 2
Как видно из таблицы и из графика на Фиг. 15, при сканировании действительно возникают моменты, когда радар обнаруживает два объекта, только один из объектов или вообще ни один из них. В первом случае радар не может разделить два объекта, во втором случае объект может разделить два объекта, находящихся на расстоянии, превышающем или равном разрешению радара. И, наконец, в предельном случае радар может разделить три объекта.
Применение
Настоящее изобретение может быть использовано в качестве всепогодного многорежимного 3D радара, например, для автомобильной навигации, помощи водителю, автономного вождения, навигации роботов и для множества других подходящих применений.
В частности, в случае использования для управления обслуживающим роботом, таким как ухаживающий робот, робот-официант и т.д., навигация может быть основана на трехмерной сканируемой с помощью радара карте окружающего пространства. В случае использования для помощи водителю или автономного вождения с помощью радара можно обнаруживать более быструю полосу движения путем трехмерного сканирования препятствий и движущихся автомобилей, а также можно уведомлять водителя с использованием активной обратной связи, например, звука, дисплея, наголовного дисплея или руля. Кроме того, в случае автономного вождения настоящее изобретение позволяет увеличить разрешение радара при ограниченном числе доступных передатчиков и приемников, а также позволяет использовать одно и то же устройство для разных применений (отслеживание одной или нескольких целей, применение для разной дальности - малой, средней, большой).
Следует понимать, что в настоящем документе показаны принцип построения и базовые примеры многорежимного 3D радара. Специалист в данной области техники, используя данные принципы, сможет получить и другие варианты осуществления изобретения, не прикладывая творческих усилий.
Следует понимать, что хотя в настоящем документе для описания различных элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один элемент, компонент, область, слой или секцию от другого элемента, компонента, области, слоя или секции. Так, первый элемент, компонент, область, слой или секция может быть назван вторым элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
В одном варианте осуществления элементы/блоки предложенного устройства находятся в общем корпусе, размещены на одной раме/конструкции/печатной плате и связаны друг с другом конструктивно посредством монтажных (сборочных) операций и функционально посредством линий связи. Упомянутые линии или каналы связи, если не указано иное, являются стандартными, известными специалистам линиями связи, материальная реализация которых не требует творческих усилий. Линией связи может быть провод, набор проводов, шина, дорожка, беспроводная линия связи (индуктивная, радиочастотная, инфракрасная, ультразвуковая и т.д.). Протоколы связи по линиям связи известны специалистам и не раскрываются отдельно.
Под функциональной связью элементов следует понимать связь, обеспечивающую корректное взаимодействие этих элементов друг с другом и реализацию той или иной функциональности элементов. Частными примерами функциональной связи может быть связь с возможностью обмена информацией, связь с возможностью передачи электрического тока, связь с возможностью передачи механического движения, связь с возможностью передачи света, звука, электромагнитных или механических колебаний и т.д. Конкретный вид функциональной связи определяется характером взаимодействия упомянутых элементов, и, если не указано иное, обеспечивается широко известными средствами, используя широко известные в технике принципы.
Конструктивное исполнение элементов предложенного устройства является известным для специалистов в данной области техники и не описывается отдельно в данном документе, если не указано иное. Элементы устройства могут быть выполнены из любого подходящего материала. Эти составные части могут быть изготовлены с использованием известных способов, включая, лишь в качестве примера, механическую обработку на станках, литье по выплавляемой модели, наращивание кристаллов. Операции сборки, соединения и иные операции в соответствии с приведенным описанием также соответствуют знаниям специалиста в данной области и, таким образом, более подробно поясняться здесь не будут.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННАЯ РЕШЕТКА MIMO С ШИРОКИМ УГЛОМ ОБЗОРА | 2018 |
|
RU2695934C1 |
| Способ оценки двумерного пространственного спектра для одного объекта с помощью MIMO антенной решетки | 2024 |
|
RU2835149C1 |
| ПЕРИМЕТРИЧЕСКАЯ АНТЕННАЯ РЕШЕТКА РАДАРА | 2006 |
|
RU2374724C1 |
| АНТЕННА МИЛЛИМЕТРОВОГО ДИАПАЗОНА И СПОСОБ УПРАВЛЕНИЯ АНТЕННОЙ | 2018 |
|
RU2688949C1 |
| МАССИВ ПРИЕМНЫХ И ПЕРЕДАЮЩИХ ЭЛЕМЕНТОВ ВЫСОКОГО РАЗРЕШЕНИЯ MIMO ДЛЯ НАВИГАЦИИ РОБОТА | 2019 |
|
RU2728517C1 |
| Способ обработки цифрового радиолокационного сигнала и радиолокатор обнаружения препятствий высокого разрешения | 2022 |
|
RU2792971C1 |
| Способ углового сверхразрешения в приемной цифровой антенной решётке | 2020 |
|
RU2746063C1 |
| МИКРОВОЛНОВОЕ БЕСПРОВОДНОЕ ЗАРЯДНОЕ УСТРОЙСТВО С ФОКУСИРОВКОЙ МИКРОВОЛНОВОГО ПОЛЯ | 2016 |
|
RU2643177C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| МНОГОПОЗИЦИОННЫЙ MIMO-РАДАР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2024 |
|
RU2838045C1 |
Изобретение относится к области радиотехники, в частности к антенным решеткам миллиметрового диапазона для 3D радара. Техническим результатом является максимальное соотношение поля обзор/разрешение при минимальном числе приемопередатчиков, уменьшение размера антенной решетки за счет наиболее эффективного использования поверхности. Антенная решетка содержит M последовательно расположенных приемных (Rx) линейных антенных решеток, каждая из которых содержит 2N антенных элементов, где M и N - натуральные числа, и 2M последовательно расположенных передающих (Tx) линейных антенных решеток, размещенных напротив упомянутых Rx решеток, причем каждая из Tx решеток содержит N антенных элементов, причем расстояние между антенными элементами в каждой из Rx и Tx решеток является одинаковым, причем каждая из Rx и Tx решеток подключена к соответствующему независимому порту управляющей схемы, причем каждая из Rx и Tx решеток выполнена с возможностью управления фазой и амплитудой со стороны управляющей схемы, с тем чтобы формировать диаграмму направленности с требуемыми характеристиками. 5 з.п. ф-лы, 27 ил., 2 табл.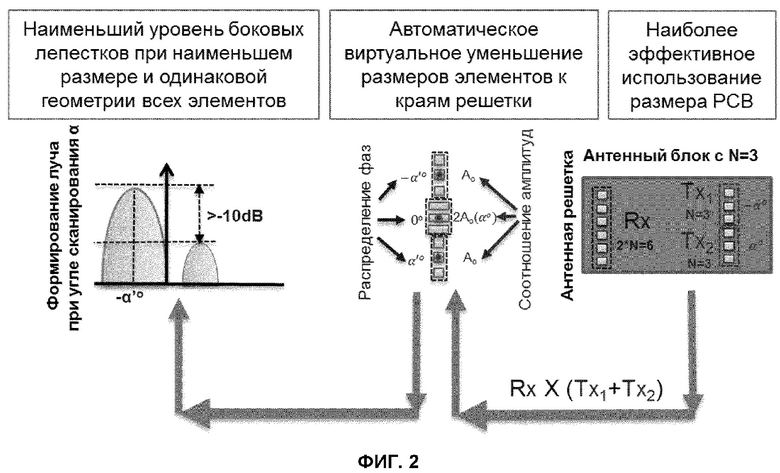
1. Антенная решетка, содержащая:
M последовательно расположенных первых линейных антенных решеток, каждая из которых содержит 2N антенных элементов, где M и N - натуральные числа, и
2M последовательно расположенных вторых линейных антенных решеток, размещенных в той же плоскости на противоположной стороне упомянутой антенной решетки относительно упомянутых первых линейных антенных решеток, причем каждая из вторых линейных антенных решеток содержит N антенных элементов,
причем расстояние между антенными элементами в каждой из первых и вторых линейных антенных решеток является одинаковым,
причем каждая из первых и вторых линейных антенных решеток подключена к соответствующему независимому порту управляющей схемы и выполнена с возможностью управления фазой и амплитудой со стороны управляющей схемы, с тем чтобы формировать диаграмму направленности с требуемыми характеристиками, причем каждый из портов управляющей схемы выполнен с возможностью устанавливать свои параметры амплитуды и начальной фазы сигнала,
причем первыми линейными антенными решетками являются приемные (Rx) или передающие (Tx) решетки, а вторыми линейными антенными решетками являются, соответственно, передающие (Tx) или приемные (Rx) решетки.
2. Антенная решетка по п. 1, в которой антенные элементы выполнены на печатной плате.
3. Антенная решетка по п. 2, в которой антенные элементы выполнены в виде патчей, круглых патчей или щелей.
4. Антенная решетка по п. 1, дополнительно содержащая управляющую схему.
5. Антенная решетка по п. 1, в которой упомянутые первые и вторые линейные антенные решетки являются частью антенны MIMO (с множеством входов и множеством выходов), содержащей несколько рядов Rx линейных решеток и несколько рядов Tx линейных решеток.
6. Антенная решетка по п. 1, в которой управление фазой и амплитудой первых и вторых линейных антенных решеток выполняется с возможностью формирования, при перемножении линий первых и вторых линейных антенных решеток, виртуальной линейной антенной решетки с уменьшением размеров излучателей к ее краям.
| ПЕРИМЕТРИЧЕСКАЯ АНТЕННАЯ РЕШЕТКА РАДАРА | 2006 |
|
RU2374724C1 |
| US 2016033632 A1, 04.02.2016 | |||
| US 2016285172 A1, 29.09.2016 | |||
| АДАПТИВНЫЕ СПОСОБЫ УПРАВЛЕНИЯ ЛУЧОМ ДЛЯ МАКСИМИЗАЦИИ РЕСУРСА БЕСПРОВОДНОЙ ЛИНИИ СВЯЗИ И УМЕНЬШЕНИЕ РАЗБРОСА ЗАДЕРЖКИ, ИСПОЛЬЗУЯ МНОГОЧИСЛЕННЫЕ ПЕРЕДАЮЩИЕ И ПРИЕМНЫЕ АНТЕННЫ | 2007 |
|
RU2446575C2 |
| 0 |
|
SU160453A1 | |

