Изобретение относится к области радиотехники, в частности, к системам дистанционного зондирования Земли (ДЗЗ) и может быть использовано в качестве многопозиционного радара с синтезированной апертурой (РСА) устанавливаемого на малые и сверхмалые космические аппараты.
Стандартным решением задач дистанционного зондирования Земли являются РСА на базе активных фазированным антенных решеток (АФАР). Данное решение является проверенным и достаточно надежным вариантом, имеющим, однако, некоторые недостатки. Высокая сложность создания и настройки АФАР является одним из главных ограничивающих факторов, который в большой степени влияет на высокую стоимость данных систем. Также данная система имеет ограничения в параметрах масштабируемости, ремонтопригодности и отказоустойчивости в виду высокой сложности настройки и введения в эксплуатацию. Использование многопозиционного РСА на основе технологии MIMO-радара позволяет упростить процесс разработки, настройки и введения в эксплуатацию системы, решающей задачи ДЗЗ при повышении характеристик ремонтопригодности, отказоустойчивости и масштабируемости.
Известно «УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ ПРИ ПОМОЩИ МНОГОПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ» /1/. Данная система использует излучаемые многопозиционными радиотехническими космическими системами сигналы для приема прямого и отраженного от земли сигналов на устройстве, расположенном на воздушном летательном аппарате, при этом прямые сигналы принимаются на слабонаправленную антенну, а отраженные -на антенную систему, формирующую М независимых непересекающихся диаграмм направленности.
Известна «АНТЕННАЯ РЕШЕТКА MIMO С ШИРОКИМ УГЛОМ ОБЗОРА» /2/. Данное изобретение представляет собой антенную решетку, разделенную на две группы, формирующие различные диаграммы направленности. В каждую группу излучателей входит активные и пассивные антенные элементы, причем если первая группа имеет передающие антенные элементы в качестве активных антенныхэлементов, то вторая имеет приемные антенные элементы, и наоборот. При этом виртуальная апертура формируется при помощи технологии MIMO, и имеет больший размер, чем реальная апертура антенны.
Известен «КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ», который является наиболее близким по своей технической сущности к заявляемому устройству 131. Радар-прототип по своей сути является радаром с синтезированием апертуры, содержащий блок управления режимами наблюдения, фазированную антенную систему, блок управления диаграммой направленности антенной системы, радиопередающее и радиоприемное устройства, синхронизатор и средства преобразования. Устройство-прототип выполняет задачи радиолокационной ледовой разведки. Недостатками данного устройства являются высокая сложность радара, невысокая отказоустойчивость и ремонтопригодность, а также невысокая разрешающая способность.
Задачей, которую решает настоящее изобретение, является повышение информативности снимков, снижение сложности разработки и изготовления приемопередающей аппаратуры, повышение отказоустойчивости, при сохранении или увеличении энергетики системы.
Это достигается за счет создания радара, состоящего из нескольких малых космических аппаратов (МКА), количество которых более одного, объединенных в одну группу. Каждый МКА элемент несет в себе радиопередающую аппаратуру, способную формировать уникальный для каждого элемента сигнал, некоррелирующий, а в пределе - ортогональный, с сигналами других элементов, и радиоприемную аппаратуру, способную принимать все излучаемые элементами сигналы, антенну и запоминающее устройство. Каждый из элементов имеет радиоаппаратуру для организации двухсторонней связи со всеми элементами радара для синхронизации излучения и приема сигналов. Принятые элементами отраженные от Земли сигналы записываются в запоминающее устройство и, впоследствии, передаются на наземный терминал обработки, где производится синтез радиолокационного изображения с использованием принципов MIMO-технологии.
Создание системы, состоящей из группы КА, организующих многопозиционный радар позволяет решить поставленную задачу. За счет сравнительной простоты одноканального приемопередатчика, использующегося на каждом КА, снижается сложность разработки, изготовления, настройки, серийного производства и введения в эксплуатацию элементов системы. Следствием упрощения технической и технологической сложности является снижение стоимости конечного продукта и повышение отказоустойчивости. Также это позволяет улучшить показатели масштабируемости, благодаря однообразности и простоте элементов системы. При отказе одного элемента системы, можно вывести КА, который сможет заменить его, что повышает показатель ремонтопригодности. Благодаря возможности повернуть КА или его антенную установку для обзора одной области всеми элементами системы, синтезированию апертуры и использованию технологий MIMO, радиолокационные характеристики системы будут эквивалентны характеристикам аналогичных систем на базе АФАР.
Космические аппараты, являющиеся элементами системы, двигаются с одинаковой скоростью на фиксированном одинаковом расстоянии, что, при учете одновременного обзора пространства, будет обужать диаграмму направленности системы, поэтому каждый элемент системы будет изучать свой, некоррелирующий, а в пределе, ортогональный, с другими сигнал. Принимать каждый элемент системы может все сигналы. Вычислительная сложность для получения конечного изображения возрастает, поэтому данные, полученные каждым КА передаются на наземный терминал для последующей корреляционной обработки и фокусировки.
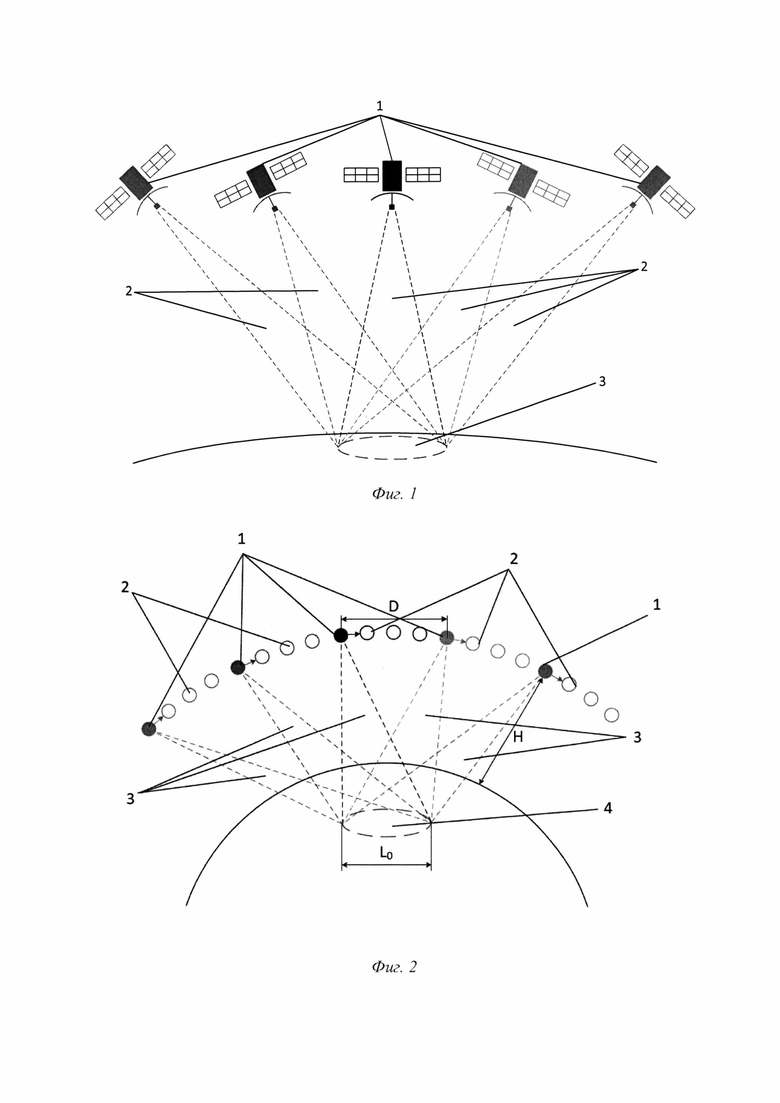
Общий вид и состав заявляемого изобретения поясняется с помощью графических материалов. На фиг. 1 представлено схематичное изображение системы, где:
1. Космические аппараты, находящиеся на орбите, несущие радиотехническую аппаратуру.
2. Главные лепестки диаграммы направленности антенн, отсканированные при помощи поворачивающего антенну устройства, либо поворотом КА таким образом, чтобы производить съемку общей зоны наблюдения.
3. Общая зона наблюдения, находящаяся на поверхности Земли.
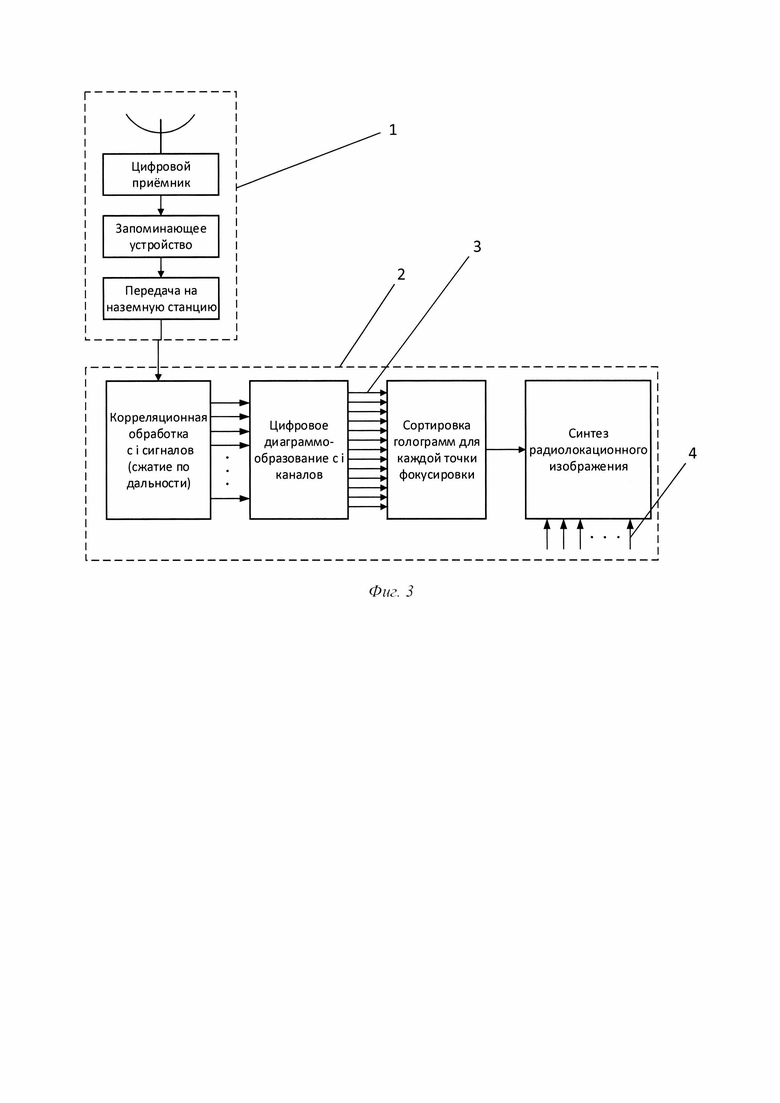
На фиг. 2 представлено схематичное изображение принципа работы системы, где:
1. Космические аппараты, несущие радиотехническую аппаратуру, находящиеся в начальный момент съемки на одинаковом и определенном расстоянии D друг от друга и двигающиеся по орбите с высотой Н от поверхности Земли с одинаковой скоростью в одном направлении.
2. Следующие положения КА, в которых будет производиться очередной снимок общей зоны наблюдения, расстояние между которыми для соседних КА также равно D.
3. Главные лепестки диаграммы направленности антенн, отсканированные при помощи поворачивающего антенну устройства, либо поворотом КА таким образом, чтобы производить съемку общей зоны наблюдения.
4. Общая зона наблюдения, находящаяся на поверхности Земли, имеющая линейный размер L0 области подсвета диаграммой направленности бортовой антенны.
На фиг. 3 схематично представлена структура приемного устройства и наземного терминала обработки, где:
1. Бортовая приемная система, находящаяся на космическом аппарате, на вход которой приходят множество ортогональных сигналов каждого КА в составе системы отраженных от поверхности Земли.
2. Наземный терминал обработки, производящий синтез радиолокационного изображения.
3. Множество голограмм для каждого положения луча.
4. Данные от других КА системы.
Работу многопозиционного MIMO-радара с синтезированной апертурой можно описать следующим образом. Многопозиционная система дистанционного зондирования земной поверхности космического базирования в виде радара с синтезированной апертурой осуществляет работу на основе кластера малых (CubeSat) или сверхмалых (MicroSat) спутников, реализующих технологию MIMO (Многопозиционная MIMO-PCA). Для реализации этой технологии каждый космический аппарат излучает собственный квазиортогональный фазоманипулированный (последовательностью Касами) сигнал, который принимают все космические аппараты системы. Такое решение значительно повышает эффективную мощность работы всей системы в целом по сравнению с отдельным космическим аппаратом, что позволяет использовать систему из кластера малых, дешевых и более легких для вывода на орбиту спутников при построении вместо одного тяжелого, высокомощного, дорогостоящего спутника, реализующего классический радар с синтезированной апертурой космического базирования. С точки зрения системы космического базирования, многопозиционная MIMO-PCA является более отказоустойчивой, реконфигурируемой и легко масштабируемой системой по сравнению с используемыми сегодня космическими аппаратами. С точки зрения системы дистанционного зондирования земной поверхности, многопозиционная MIMO-PCA способна обеспечить высокую четкость изображений и точность сбора данных о земной поверхности, что делает эту систему незаменимой для мониторинга и исследования окружающей среды, картографии, а также для других целей, требующих точного и оперативного сбора информации на больших территориях.
В качестве примера реализации можно привести многопозиционный MIMO-радар на основе пяти космических аппаратов, оснащенных одноканальными приемной и передающей системами со следующими характеристиками:
- Несущая частота - 1 ГГц;
- Частота повторения импульсов - 10 кГц;
- Высота орбиты - 500 км;
- Расстояние между спутниками - 21 км;
- Ширина проекции диаграммы антенны в угломестной плоскости - 70 км;
- Ширина проекции диаграммы антенны в азимутальной плоскости - 42 км;
- Скорость кластера спутников - 7 м/с.
Для формирования квазиортогонального фазоманипулированного зондирующего сигнала на каждом спутнике используется уникальная последовательность Касами длиной 1023 символа. Космические аппараты образуют разнесенную апертуру, размер которой определяется расстояниями между ними. В данном случае апертура представляет собой линейную антенную решетку длиной 84 км. Система движется на низкой околоземной орбите с постоянной скоростью, за счет повторения излучения импульсов с постоянной частотой образуется синтезируемая апертура, причем каждый космический аппарат из кластера в определенный момент времени выполняет роли передатчика и приемника на каждом «элементе» синтезируемой апертуры. Для сбора данных каждый космический аппарат синхронно излучает уникальный фазоманипулированный зондирующий сигнал, а затем принимает как собственный сигнал, так и сигналы, излученные другими спутниками кластера. Космические аппараты независимо накапливают получаемые сигналы. Особенностью работы многопозиционной системы является увеличение объема получаемых данных о цели в 25 раз (в общем случае M*N, где М - число передатчиков в системе, N - число приемников в системе) за счет различной длины пути, который проходит зондирующий сигнал от спутника-передатчика к спутнику-приемнику.
Полученные сигналы передаются на землю и обрабатываются с помощью алгоритмов цифровой обработки сигналов, которые синхронизируют сигналы, учитывая возникающее смещение элементов траекторного сигнала. По результатам такой обработки для точечной цели (что наиболее показательно) получается траекторный сигнал, аналогичный получаемым в классической РСА, но с амплитудным распределением вдоль всей своей длины, так как полученные данные группируются так, чтобы суммировались сигналы, снятые с одной и той же координаты. Соответственно, с увеличением числа элементов системы будет расти количество точек, а соответственно и усиление системы, связанное со способом итоговой обработки сигнала. Дальнейшая обработка для получения радиолокационного изображения как для показательной точечной цели, так и для обозреваемой земной поверхности осуществляется по методике классических РСА.
Полученные характеристики энергетики сигнала сопоставимы с характеристиками прототипа, при улучшении отказоустойчивости, масштабируемости, реконфигурируемости, упрощении разработки и введении с эксплуатацию настоящего изобретения.
Источники информации:
1 - Патент РФ №103935;
2 - Патент РФ №2695934;
3 - Патент РФ №2158008 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ ЗЕМЛИ | 2018 |
|
RU2703294C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2019 |
|
RU2719535C1 |
| Радиолокационный комплекс для обнаружения астероидов | 2016 |
|
RU2625542C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ ОКЕАНСКИХ ЯВЛЕНИЙ ИЗ КОСМОСА | 2009 |
|
RU2447457C2 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| Способ создания глобальной информационной среды в околоземном пространстве и многофункциональная космическая информационная система "Парадигма" на базе сети низкоорбитальных космических аппаратов для его осуществления | 2018 |
|
RU2707415C2 |
Изобретение относится к системам дистанционного зондирования Земли. Техническим результатом является повышение информативности снимков, снижение сложности разработки и изготовления приемопередающей аппаратуры, повышение отказоустойчивости. Заявленный многопозиционный MIMO-радар с синтезированной апертурой состоит из группы малых космических аппаратов (МКА), движущихся на низкой околоземной орбите с одинаковой скоростью на фиксированном одинаковом расстоянии друг от друга. Каждый МКА содержит радиопередающую и радиоприемную части в виде одноканального приемопередатчика, способного формировать фазоманипулированный квазиортогональный сигнал, и принимать отраженные от Земли сигналы всех МКА, антенну для съемки общей зоны наблюдения MIMO-радара на поверхности Земли, запоминающее устройство и радиоаппаратуру для организации двухсторонней связи и синхронизации излучения и приема сигналов всех МКА радара. Данные об отраженных сигналах МКА передаются на наземный терминал, производящий корреляционную обработку, фокусировку и синтез радиолокационного изображения с использованием принципов MIMO-технологии. 3 ил.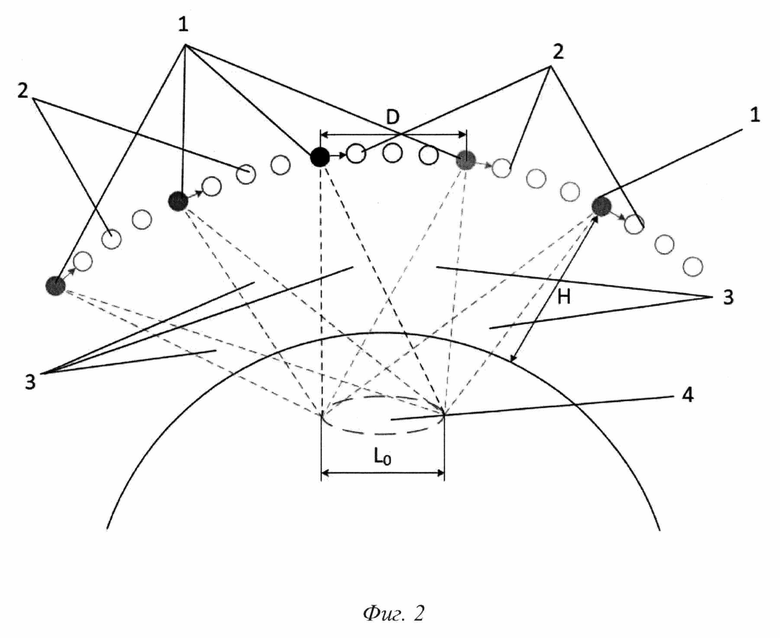
Многопозиционный MIMO-радар с синтезированной апертурой, состоящий из радиопередающей и радиоприемной части, синхронизатора, антенной системы, отличающийся тем, что MIMO-радар состоит из группы малых космических аппаратов (МКА), движущихся на низкой околоземной орбите с одинаковой скоростью на фиксированном одинаковом расстоянии друг от друга, каждый из которых содержит радиопередающую и радиоприемную части в виде одноканального приемопередатчика, способного формировать квазиортогональный сигнал, фазоманипулированный последовательностью Касами длиной 1023 символа, некоррелирующий с сигналами других МКА, и принимать отраженные от Земли сигналы всех МКА, антенну, главный лепесток диаграммы направленности которой ориентирован для съемки общей зоны наблюдения MIMO-радара на поверхности Земли, запоминающее устройство для записи принятых МКА отраженных от Земли сигналов и радиоаппаратуру для организации двухсторонней связи со всеми МКА радара для синхронизации излучения и приема сигналов всех МКА радара, при этом данные об отраженных от Земли сигналах МКА, записанные запоминающим устройством каждого МКА, передаются на наземный терминал, производящий корреляционную обработку, фокусировку и синтез радиолокационного изображения с использованием принципов MIMO-технологии.
| US 2020233080 A1, 23.07.2020 | |||
| WO 2022103403 A1, 19.05.2022 | |||
| CN 117970328 A, 03.05.2024 | |||
| US 4727373 A, 23.02.1988 | |||
| ZHOU F., YANG J., JIA L., YANG X., XING M | |||
| Ultra-high resolution imaging method for distributed small satellite spotlight MIMO-SAR based on sub-aperture image fusion // Sensors | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Ксендзук А.В., Фатеев В.Ф., | |||

