Заявляемое техническое решение относится к радиотехнике, в частности к радиолокационным системам обнаружения препятствий, измерения их пространственных координат и радиальной составляющей относительной скорости и может быть использовано в составе систем помощи водителю (ADAS), систем управления мобильных роботов и беспилотного транспорта, интеллектуальных систем управления транспортной инфраструктурой.
Из уровня техники известен радиолокатор с линейной частотной модуляцией зондирующего сигнала (см. описание патента РФ на изобретение №2060514, МПК G01S 13/34 (1995.01), опубл. 20.05.1996 г. по заявке №93 93032921 от 24.06.1993 г., патентообладатель Научно-производственное конструкторское бюро «Алмаз» (RU)).
Радиолокатор с линейной частотной модуляцией зондирующего сигнала состоит из передающего устройства, содержащего генератор сигнала несущей частоты, двух смесителей, генератора линейно-частотно-модулированного сигнала, полосового фильтра, антенного переключателя с передающей антенной, гетеродина смещения частоты, модулятора. Также радиолокатор состоит из приемного устройства, содержащего приемную антенну, два полосовых фильтра, смеситель, опросный блок, каналы корреляционно-фильтровой матрицы, два блока памяти и усреднения, вычитатель, индикатор с блоком разверток, канальные модуляторы, генератор стробов, блок наведения по частоте, синтезатор частот, синхронизатор. Радиолокатор предназначен для обнаружения малоскоростных объектов, селектирования каждого движущегося объекта в группе, подавления сигналов, отраженных от местных предметов с любой дальности, и сигналов пассивных помех.
Наиболее близким аналогом заявляемому решению является способ и система для радиолокационного измерения скоростей и координат объектов (см. описание патента РФ на изобретение №2255352, МПК G01S 13/42 (2000.01), G01S 13/93 (2000.01), опубл. 27.06.2005 г. по заявке №2003120811/09 от 07.07.2003 г., патентообладатель Кошуринов Е.И. (RU)).
Способ измерения скоростей и координат объектов осуществляют путем излучения непрерывного частотно-модулированного зондирующего сигнала, приема отраженного сигнала в одной или нескольких пространственных позициях, перемножения его с излучаемым сигналом и вычисления матрицы значений функций корреляции (ФК) полученного гомодинного сигнала и двумерной (дальность, скорость) матрицы базисных сигналов, сформированных из модулирующего сигнала. Дальности и скорости обнаруженных объектов вычисляют по номерам элементов матрицы ФК, в которых значения ФК превышают пороговый уровень. Значение скорости уточняют вычислением частот составляющих спектра корреляционных сигналов, полученных как последовательность значений ФК за время накопления сигнала. При приеме отраженного сигнала в нескольких пространственно разнесенных позициях формируют для каждой позиции трех- (дальность, скорость, угловая координата) или четырехмерную матрицу базисных сигналов и по номерам соответствующей матрицы суммарных по позициям ФК определяют дальности, угловые координаты и скорости обнаруженных объектов.
Система для измерения скоростей и координат объектов содержит антенно-фидерное устройство, гомодинное приемопередающее устройство, коррелометр, формирующий матрицы базисных сигналов и вычисляющий функции корреляции и корреляционные сигналы, и процессор, формирующий модулирующий сигнал и вычисляющий скорости и координаты объектов.
Недостатком вышеуказанных аналогов является низкая разрешающая способность радиолокатора по углу, а именно отсутствие возможности селекции по «дальности-азимуту» (угловой координате).
Заявляемое техническое решение направлено на устранение указанного недостатка.
Техническим результатом заявляемого изобретения является повышение вероятности обнаружения объектов. В случае сцен с подвижными объектами за счет селекции по дальности и скорости, а в случае статических сцен - за счет селекции по дальности и азимуту.
Указанный технический результат достигается благодаря способу обработки цифрового радиолокационного сигнала, характеризующегося тем, что формируются виртуальные антенные решетки на основе MIMO-структуры, при этом обеспечивается высокое разрешение в азимутальной плоскости, что позволяет выполнять обнаружение объектов на карте «дальность-азимут» в дополнение к способу обнаружения объектов на карте «дальность-скорость». Таким образом, объединяются результаты обнаружения объектов с селекцией по дальности, скорости и азимуту. После аналогово-цифрового преобразования для каждого кадра формируют трехмерный массив данных. Далее для каждого приемного канала выполняют двумерное быстрое преобразование Фурье (БПФ) по «дальности-скорости». В каждом приемном канале вычисляют квадрат модуля рассчитанной двумерной спектральной плотности «дальность-скорость», а затем выполняют накопление сигнала суммированием полученных квадратов модулей по всем приемным каналам, тем самым формируя карту «дальность-скорость». На полученной карте «дальность-скорость» с помощью алгоритма обнаружения объектов радиолокационного зондирования выделяют пики, соответствующие центрам рассеяния. Фильтруются центры рассеяния, соответствующие подстилающей поверхности. По частотам, на которых имеются пики на карте «дальность-скорость», определяют расстояния и скорости объектов, расположенных в поле зрения радиолокатора. Для элементов трехмерного массива данных осуществляют коррекцию допплеровского смещения, обусловленного движением объектов и применением антенной решетки в виде MIMO-структуры. Причем коррекцию допплеровского смещения выполняют для приемных каналов, используемых при построении антенных решеток для определения угловых координат в азимутальной и угломестной плоскостях. Для всех отсчетов двумерной спектральной плотности по «дальности-скорости» выполняют БПФ по элементам антенной решетки в азимутальной плоскости, в результате определяют трехмерную спектральную плотность «дальность-скорость-азимут». Для каждого отсчета скорости вычисляют квадрат модуля рассчитанной двумерной спектральной плотности «дальность-азимут», затем выполняют накопление сигнала суммированием полученных квадратов модулей по всем отсчетам скоростей, тем самым формируя карту «дальность-азимут». Накопление может выполняться не для всех отсчетов скоростей, а только для тех, на которых обнаружены объекты на карте «дальность-скорость». На полученной карте «дальность-азимут» с помощью алгоритма обнаружения объектов радиолокационного зондирования выделяют пики, соответствующие центрам рассеяния. Фильтруются центры рассеяния, соответствующие подстилающей поверхности. По частотам, на которых имеются пики на карте «дальность-азимут», определяют расстояния и азимуты объектов, расположенных в поле зрения радиолокатора. Для отсчетов трехмерной спектральной плотности, соответствующих дальностям и скоростям объектов, обнаруженных на карте «дальность-скорость», вычисляют квадраты модулей результатов БПФ по азимуту. С помощью алгоритма обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по азимуту находят пики, соответствующие азимутам объектов. Таким образом, определяют тройку параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-скорость». Аналогично, для отсчетов трехмерной спектральной плотности, соответствующих дальностям и азимутам объектов, обнаруженных на карте «дальность-азимут», вычисляют квадраты модулей результатов БПФ по скорости. С помощью алгоритма обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по скорости находят пики, соответствующие скоростям объектов. Таким образом, определяют тройку параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-азимут». В результате имеют два множества объектов, обнаруженных на основе анализа карт «дальность-скорость» и «дальность-азимут». Элементы множеств - это обнаруженные объекты, каждый из которых описывается тройкой параметров «дальность», «скорость», «азимут». Эти множества объединяют таким образом, что повторяющиеся элементы входят в объединение только один раз. В двумерной спектральной плотности «дальность-скорость», рассчитанной по приемным каналам в угломестной плоскости, для дальности и скорости каждого обнаруженного объекта определяют угол места путем цифрового формирования луча в направлении азимута объекта и БПФ по угломестным элементам антенной решетки. Далее рассчитывают квадрат модуля результата БПФ и выполняют поиск пиков, соответствующих угломестным координатам объектов.
Также технический результат достигается благодаря тому, что радиолокатор обнаружения препятствий высокого разрешения содержит приемные и передающие антенны, построенные на основе МИМО-структуры, что обеспечивает высокое разрешение в азимутальной плоскости, генератор зондирующего сигнала, выход которого подключен через коммутатор, фазовращатели и усилители к входам передающих антенн. Выход генератора зондирующего сигнала подключен к первым входам квадратурных смесителей, вторые входы которых подключены через малошумящие усилители к выходам приемных антенн, а выходы квадратурных смесителей подключены к входам квадратурных аналого-цифровых преобразователей, выходы которых соединены с цифровым вычислителем, причем цифровой вычислитель выполнен с возможностью реализации заявляемого способа обработки цифрового радиолокационного сигнала.
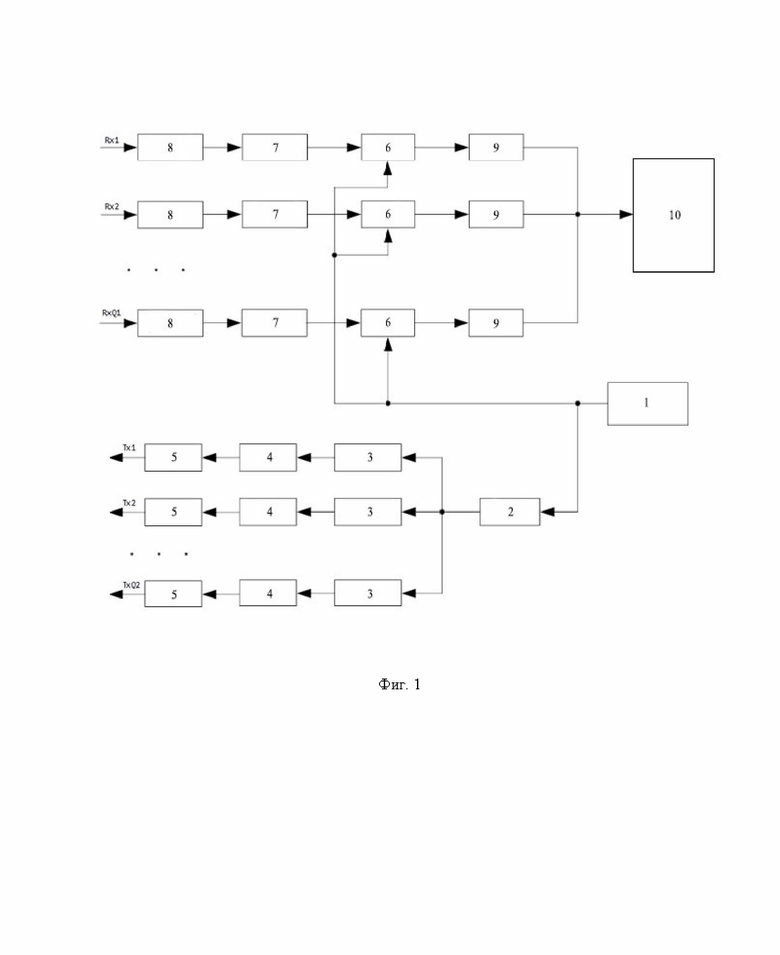
На фиг. 1 показана структурная схема радиолокатора;
На фиг. 2 показана схема, иллюстрирующая алгоритм обработки цифровых радиолокационных сигналов радиолокаторов с ЛЧМ.
Заявляемый радиолокатор обнаружения препятствий высокого разрешения (см. фиг. 1) содержит генератор зондирующего сигнала 1, выход которого подключен через коммутатор 2, фазовращатели 3 и усилители 4 к входам передающих антенн 5. Также выход генератора зондирующего сигнала 1 подключен к первым входам квадратурных смесителей 6, вторые входы которых подключены через малошумящие усилители 7 к выходам приемных антенн 8, а выходы квадратурных смесителей 6 подключены к входам квадратурных аналого-цифровых преобразователей (АЦП) 9, выходы которых соединены с цифровым вычислителем 10.
Частотно-модулированный зондирующий сигнал генератора 1 через коммутатор 2, фазовращатели 3, реализующие сдвиг фазы опорного сигнала, подается на входы усилителей 4, после чего излучается передающими антеннами 5, а отраженный сигнал принимается приемными антеннами 8, которые по входным каналам через малошумящие усилители 7 передают сигнал на квадратурные квадратурные смесители 6. Одновременно на квадратурные смесители 6 поступает сигнал с генератора зондирующего сигнала 1. На выходе квадратурных смесителей 6 с помощью фильтра выделяется сигнал разностной частоты, который далее поступает на квадратурные АЦП 9. Оцифрованные отсчеты сигнала разностной частоты от квадратурного АЦП 9 поступают на вход цифрового вычислителя 10, в котором реализуется цифровая обработка радиолокационного сигнала в соответствии с заявляемым способом.
Заявляемый способ реализуется следующим образом.
Зондирующий сигнал радиолокатора представляет собой электромагнитное колебание с ЛЧМ. В каждом цикле зондирования (кадре) излучается последовательность импульсов, что обеспечивает возможность измерения радиальных составляющих векторов относительных скоростей обнаруженных объектов на основе эффекта Допплера. Антенная система радиолокатора представляет собой MIMO-структуру и обеспечивает измерение угловых координат объектов азимутов (с высоким разрешением) и углов места за счет формирования линейных или прямоугольных виртуальных антенных решеток. При определении угловых координат объектов с помощью такой антенной системы выполняется компенсация набегов фаз, обусловленных движением объектов сцены радиозондирования и временным разделением приемных или передающих каналов, используемых при формировании виртуальных антенных решеток.
Заявляемый способ предназначен для обработки оцифрованных отсчетов радиолокационного сигнала разностной частоты. Зондирующий сигнал (см. фиг. 1) излучается одной или несколькими из Q2 передающих антенн 5 с начальными фазами, заданными в каждом передающем канале. Отраженный от объекта сигнал принимается с помощью Q1 приемных антенн 8 и в каждом канале после усиления подается на квадратурные смесители 6, где выделяется радиолокационный сигнал разностной частоты, оцифрованные отсчеты которого на выходах квадратурных АЦП 9 представляют собой входные данные для рассматриваемого алгоритма.
В результате выполнения заявляемого способа определяются четыре параметра каждого обнаруженного объекта - три пространственные координаты и радиальная составляющая вектора скорости объекта относительно радиолокатора.
Принцип функционирования алгоритма обработки цифровых радиолокационных сигналов радиолокаторов с ЛЧМ, позволяющего при обнаружении объектов объединить результаты селекции по параметрам «дальность», «скорость» и «азимут» показан на фиг. 2.
После аналогово-цифрового преобразования для каждого кадра имеем трехмерный массив данных smpq, где индексами m, р и q обозначены номер временного отсчета на выходах квадратурных АЦП 9, номер импульса и номер виртуального приемного канала соответственно (1).
Для каждого приемного канала выполняется двумерное БПФ размерностью Р×М по «дальности-скорости», то есть по М отсчетам внутри каждого из Р импульсов и по Р отсчетам (импульсам) для каждого из М отсчетов времени:

В двумерной спектральной плотности «дальность-скорость» Snk (в каждом приемном канале q) частоты спектральных составляющих с индексами n и k пропорциональны расстояниям до центров рассеяния зондирующего сигнала и скоростям их движения соответственно.
Расстояние до объекта:
где fs - частота дискретизации, с - скорость света в вакууме, S - скорость нарастания частоты при ЛЧМ.
Радиальная составляющая вектора относительной скорости:
где λ - длина волны зондирующего сигнала (на средней частоте зондирования), tp - период повторения импульсов зондирования.
БПФ по «дальности-скорости» выполняется для всех приемных каналов, используемых при формировании виртуальных антенных решеток в азимутальной и угломестной плоскостях (2, 3).
В каждом приемном канале вычисляется квадрат модуля рассчитанной на предыдущем этапе двумерной спектральной плотности «дальность-скорость», после чего выполняется накопление сигнала суммированием полученных квадратов модулей по всем приемным каналам (далее карта «дальность-скорость»):
где Q - число приемных каналов, по которым выполняется накопление (4).
На полученной карте «дальность-скорость» SRV (n, k) с помощью одного из алгоритмов обнаружения объектов радиолокационного зондирования выделяются пики, соответствующие центрам рассеяния. По частотам, на которых имеются пики на карте «дальность-скорость», определяются расстояния и скорости объектов, расположенных в поле зрения радиолокатора. В качестве алгоритма обнаружения объектов радиолокационного зондирования может применяться, например, алгоритм с постоянной вероятностью ложных тревог (CFAR) (5).
Для всех отсчетов Smpq выполняется коррекция допплеровского смещения, обусловленного движением объектов и применением антенной решетки в виде MIMO-структуры. Коррекция допплеровского смещения выполняется для приемных каналов, используемых при построении антенных решеток для определения угловых координат в азимутальной и угломестной плоскостях (6).
Для всех отсчетов двумерной спектральной плотности по «дальности-скорости», соответствующих скоростям объектов, и для всех отсчетов времени (по дальности) выполняется БПФ по элементам антенной решетки в азимутальной плоскости (БПФ по азимуту). В результате определяется трехмерная спектральная плотность «дальность-скорость-азимут»:
где Qa - число элементов в виртуальной решетке в азимутальной плоскости (7).
С целью накопления сигнала вычисляются квадраты модулей двумерных спектральных плотностей «дальность-азимут» и суммируются по всем отсчетам k, соответствующим скоростям обнаруженных объектов (далее карта «дальность-азимут») (8):
На карте «дальность-азимут» SRA (n, l) с помощью одного из алгоритмов обнаружения объектов радиолокационного зондирования выделяются пики, соответствующие центрам рассеяния. По частотам, на которых имеются пики на карте «дальность-азимут», определяются расстояния и азимуты объектов, расположенных в поле зрения радиолокатора. В качестве алгоритма обнаружения объектов радиолокационного зондирования может применяться, например, алгоритм с постоянной вероятностью ложных тревог (CFAR) (9).
Для отсчетов трехмерной спектральной плотности, соответствующих дальностям и скоростям объектов, обнаруженных на карте «дальность-скорость», вычисляются квадраты модулей результатов БПФ по азимуту. С помощью одного из алгоритмов обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по азимуту находятся пики, соответствующие азимутам объектов. Таким образом, определяется тройка параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-скорость» (10).
Аналогично для отсчетов трехмерной спектральной плотности, соответствующих дальностям и азимутам объектов, обнаруженных на карте «дальность-азимут», вычисляются квадраты модулей результатов БПФ по скорости. С помощью одного из алгоритмов обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по скорости находятся пики, соответствующие скоростям объектов. Таким образом, определяется тройка параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-азимут» (11).
В результате формируются два множества объектов, - которые обнаружены на основе анализа карт «дальность-скорость» и «дальность-азимут». Элементы множеств -это обнаруженные объекты, каждый из которых описывается тройкой параметров «дальность», «скорость», «азимут». Эти множества объединяются, повторяющиеся элементы входят в объединение только один раз (12). Объединение результатов анализа карт «дальность-скорость» и «дальность-азимут» позволяет снизить вероятность пропуска объекта по сравнению с существующими алгоритмами, поскольку селекция объектов выполняется по дальности, скорости и азимуту.
Определение угла места обнаруженных объектов выполняется следующим образом. В двумерной спектральной плотности «дальность-скорость», рассчитанной по приемным каналам в угломестной плоскости, для дальности и скорости каждого обнаруженного объекта выполняется цифровое формирование луча в направлении азимута объекта и БПФ по угломестным элементам антенной решетки. Далее рассчитывается квадрат модуля результата БПФ и выполняется поиск пиков, соответствующих угломестным координатам объектов (13).
В результате обработки радиолокационного сигнала обнаруживаются объекты и определяются четыре параметра для каждого обнаруженного объекта - три пространственные координаты и радиальная составляющая вектора скорости объекта относительно радиолокатора.
Таким образом, обнаружение объектов выполняется по картам «дальность-скорость» и «дальность-азимут», что позволяет объединить преимущества селекции объектов по параметрам «дальность», «скорость» и «азимут».

Изобретение относится к радиотехнике, в частности к радиолокационным системам обнаружения препятствий. Техническим результатом является повышение вероятности обнаружения объектов. Он достигается благодаря способу обработки цифрового радиолокационного сигнала, характеризующегося тем, что формируются виртуальные антенные решетки на основе MIMO-структуры, при этом обеспечивается высокое разрешение в азимутальной плоскости, что позволяет выполнять обнаружение объектов на карте «дальность-азимут» в дополнение к способу обнаружения объектов на карте «дальность-скорость». Таким образом, объединяются результаты обнаружения объектов с селекцией по дальности, скорости и азимуту. Также предложен радиолокатор с возможностью реализации заявляемого способа обработки цифрового радиолокационного сигнала. Предлагаемое техническое решение обеспечивает обнаружение объектов по картам «дальность-скорость» и «дальность-азимут», что позволяет объединить преимущества селекции объектов по параметрам «дальность», «скорость» и «азимут». 2 н.п. ф-лы, 2 ил.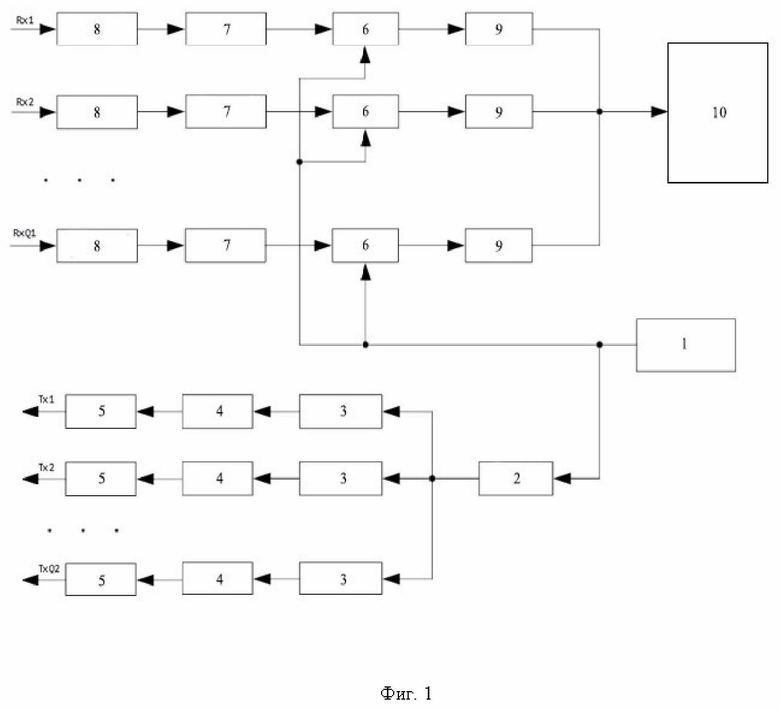
1. Способ обработки цифрового радиолокационного сигнала для радиолокатора обнаружения препятствий высокого разрешения, характеризующийся тем, что:
- в каждом кадре набором передающих антенн излучают зондирующие сигналы, а набором приемных антенн принимают отраженные сигналы, тем самым формируют виртуальные антенные решетки на основе MIMO-структуры, при этом обеспечивают высокое разрешение в азимутальной плоскости;
- для каждого кадра формируют трёхмерный массив данных путем аналогово-цифрового преобразования;
- для каждого приёмного канала выполняют двумерное быстрое преобразование Фурье (БПФ) по «дальности-скорости»;
- в каждом приёмном канале вычисляют квадрат модуля рассчитанной двумерной спектральной плотности «дальность-скорость», затем выполняют накопление сигнала суммированием полученных квадратов модулей по всем приёмным каналам, тем самым формируя карту «дальность-скорость»;
- на полученной карте «дальность-скорость» с помощью алгоритма обнаружения объектов радиолокационного зондирования выделяют пики, соответствующие центрам рассеяния, также фильтруют пики, соответствующие отражениям от подстилающей поверхности;
- по частотам, на которых имеются пики на карте «дальность-скорость», определяют расстояния и скорости объектов, расположенных в поле зрения радиолокатора;
- коррекцию допплеровского смещения выполняют для приёмных каналов, используемых при построении антенных решёток для определения угловых координат в азимутальной и угломестной плоскостях;
- для всех отсчётов двумерной спектральной плотности «дальность-скорость» выполняют БПФ по элементам антенной решётки в азимутальной плоскости, в результате определяют трёхмерную спектральную плотность «дальность-скорость-азимут»;
- для каждого отсчёта скорости вычисляют квадрат модуля рассчитанной двумерной спектральной плотности «дальность-азимут», затем выполняют накопление сигнала суммированием полученных квадратов модулей по отсчётам скоростей, на которых обнаружены объекты на карте «дальность-скорость», тем самым формируя карту «дальность-азимут»;
- на полученной карте «дальность-азимут» с помощью алгоритма обнаружения объектов радиолокационного зондирования выделяют пики, соответствующие центрам рассеяния, также фильтруют пики, соответствующие отражениям от подстилающей поверхности;
- по частотам, на которых имеются пики на карте «дальность-азимут», определяют расстояния и азимуты объектов, расположенных в поле зрения радиолокатора;
- для отсчётов трёхмерной спектральной плотности, соответствующих дальностям и скоростям объектов, обнаруженных на карте «дальность-скорость», вычисляют квадраты модулей результатов БПФ по азимуту, с помощью алгоритма обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по азимуту находят пики, соответствующие азимутам объектов, и, таким образом, определяют тройку параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-скорость»;
- для отсчётов трёхмерной спектральной плотности, соответствующих дальностям и азимутам объектов, обнаруженных на карте «дальность-азимут», вычисляют квадраты модулей результатов БПФ по скорости, с помощью алгоритма обнаружения объектов радиолокационного зондирования на зависимости квадрата модуля БПФ по скорости находят пики, соответствующие скоростям объектов, и, таким образом, определяют тройку параметров «дальность», «скорость», «азимут» каждого объекта, обнаруженного на карте «дальность-азимут»;
- два множества объектов, обнаруженных на основе анализа карт «дальность-скорость» и «дальность-азимут» с тройкой параметров «дальность», «скорость», «азимут», объединяют таким образом, что повторяющиеся элементы входят в объединение только один раз;
- в двумерной спектральной плотности «дальность-скорость», рассчитанной по приёмным каналам в угломестной плоскости, для дальности и скорости каждого обнаруженного объекта определяют угол места путем цифрового формирования луча в направлении азимута объекта и БПФ по угломестным элементам антенной решётки;
- рассчитывают квадрат модуля результата БПФ и выполняют поиск пиков, соответствующих угломестным координатам объектов.
2. Радиолокатор обнаружения препятствий высокого разрешения, содержащий генератор зондирующего сигнала, выход которого подключен через коммутатор, фазовращатели и усилители к входам передающих антенн, а также к первым входам квадратурных смесителей, вторые входы которых подключены через малошумящие усилители к выходам приемных антенн, а выходы квадратурных смесителей подключены к входам квадратурных аналого-цифровых преобразователей, выходы которых соединены с цифровым вычислителем, отличающийся тем, что цифровой вычислитель выполнен с возможностью выполнения шагов, описанных в п. 1 способа.
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| Способ формирования изображения поверхности в бортовой радиолокационной станции с синтезированием апертуры антенны с электронным управлением лучом | 2016 |
|
RU2617116C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ В ГРУППЕ ОБЪЕКТОВ СИСТЕМОЙ ДОПЛЕРОВСКИХ ПРИЕМНИКОВ | 2019 |
|
RU2726321C1 |
| US 5325097 A1, 28.06.1994. | |||

