Область техники, к которой относится изобретение
Настоящее изобретение относится к области навигации автономно управляемых транспортных средств и подвижных роботов. Более конкретно, изобретение относится к системе навигации подвижного робота, содержащей массив приемных и передающих элементов с множеством входов и множеством выходов (MIMO) для обнаружения препятствий в пространстве.
Уровень техники
В области техники автономно управляемых транспортных средств и подвижных роботов в настоящее время активно развиваются технологии, относящиеся к навигации посредством обнаружения препятствий в пространстве при помощи различных датчиков. Так, в частности, для трехмерного (3D) формирования изображений и обнаружения препятствий одним из возможных средств является трехмерный/четырехмерный 3D/4D радар миллиметрового диапазона. Для обеспечения высокого разрешения в таком радаре (в частности, в автомобильной промышленности) часто используется 3D/4D массив приемных и передающих элементов с множеством входов и множеством выходов (MIMO). Однако технология MIMO с большим количеством каналов для обеспечения высокого разрешения требует значительного времени на обработку данных, что может быть нежелательным в условиях, когда технология используется в системе навигации автономного транспортного средства, беспилотного летательного аппарата или подвижного робота, поскольку в таких условиях требуется быстрое распознавание препятствий и выдача навигационных команд для их обхода.
В источнике US 20180356506 (GM Global Technology Operations LLC, опубликован 13.12.2018) раскрыты система и способ двухступенчатого формирования диаграммы направленности в радарной системе с множеством входов и множеством выходов (MIMO), обеспечивающей формирование увеличенной виртуальной апертуры. В известном решении получают вектор x поступающего сигнала, ассоциированный с обнаруженной целью. Далее выполняют «грубое» формирование диаграммы направленности посредством первого набора из k1 сочетаний азимутального угла θi и угла склонения φi, ассоциированных с каждым элементом вектора, и выбирают область в плоскости азимута–склонения вокруг поднабора из k1 сочетаний азимутального угла θi и угла склонения φi для каждого элемента упомянутого вектора. Затем выполняют «точное» формирование диаграммы направленности в выбранной области посредством второго набора k2 сочетаний азимутального угла θi и угла склонения φi, ассоциированных с каждым элементом упомянутого вектора. Второй набор k2 сочетаний азимутального угла θi и угла склонения φi имеет меньшие расстояния между точками в плоскости азимута–склонения, чем первый набор k1. В результате точно определяют местоположение цели.
Такой подход может быть принят в качестве ближайшего аналога заявляемого изобретения. Однако ему присущи недостатки, состоящие, в частности, в том, что двухступенчатое формирование диаграммы направленности не приводит к уменьшению количества излучающих элементов или к возможности использования одних и тех же компонентов массива, и кроме того данное известное решение также характеризуется длительным временем обработки данных.
Существует потребность в сокращении времени обработки данных при обнаружении препятствий и/или формировании карты препятствий в системе навигации робота или автономно управляемого транспортного средства.
Раскрытие изобретения
Данный раздел, раскрывающий различные аспекты и варианты выполнения заявляемого изобретения, предназначен для представления краткой характеристики заявляемых объектов изобретения и вариантов его выполнения. Подробная характеристика технических средств и методов, реализующих сочетания признаков заявляемых изобретений, приведена ниже. Ни данное раскрытие изобретения, ни нижеприведенное подробное описание и сопровождающие чертежи не следует рассматривать как определяющие объем заявляемого изобретения. Объем правовой охраны заявляемого изобретения определяется исключительно прилагаемой формулой изобретения.
С учетом вышеуказанных недостатков уровня техники задача настоящего изобретения состоит в создании способа обнаружения объектов посредством радара с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), который обеспечивает сокращение времени обработки данных при обнаружении препятствий и/или формировании карты препятствий в системе навигации робота или автономно управляемого транспортного средства, а также соответствующей системы навигации.
Для решения упомянутой задачи, в соответствии с одним аспектом изобретение относится к способу обнаружения объектов посредством радара с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), причем способ содержит: первый этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и N приемных или передающих элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM; второй этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных или передающих элементов и N’ передающих или приемных элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’по горизонтали; третий этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и M’ приемных или передающих элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали; и этап формирования карты обнаруженного объекта на основании результатов обнаружения на по меньшей мере одном из упомянутых этапов формирования диаграммы направленности. В варианте выполнения второй этап формирования диаграммы направленности и третий этап формирования диаграммы направленности выполняются одновременно и/или параллельно. В варианте выполнения на этапе формирования карты обнаруженного объекта формируют карту обнаруженного объекта на основании результатов обнаружения на первом, втором и третьем этапах формирования диаграммы направленности. В варианте выполнения на втором этапе формирования диаграммы направленности и/или третьем этапе формирования диаграммы направленности формируют диаграмму направленности в интересующей области, в которой находится объект, обнаруженный в результате первого этапа диаграммы направленности, при этом интересующая область меньше общего поля обзора массива приемных и передающих элементов с множеством входов и множеством выходов (MIMO).
В другом аспекте изобретение относится к системе навигации подвижного робота, содержащей: радар с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), при этом радар выполнен с возможностью: формирования первой диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и N приемных или передающих элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM; формирования второй диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных или передающих элементов и N’ передающих или приемных элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’по горизонтали; формирования третьей диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и M’ приемных или передающих элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали; и процессор, выполненный с возможностью: формирования карты обнаруженного объекта на основании результатов обнаружения посредством по меньшей мере одной из упомянутых диаграмм направленности; и принятия решений по управлению подвижным роботом на основании упомянутой карты обнаруженного объекта.
В варианте выполнения вторая диаграмма направленности и третья диаграмма направленности формируются одновременно и/или параллельно. В варианте выполнения процессор выполнен с возможностью формирования карты обнаруженного объекта на основании результатов обнаружения на первом, втором и третьем этапах формирования диаграммы направленности. В варианте выполнения вторая диаграмма направленности и/или третья диаграмма направленности формируются в интересующей области, в которой находится объект, обнаруженный посредством первой диаграммы направленности, при этом интересующая область меньше общего поля обзора массива приемных и передающих элементов с множеством входов и множеством выходов (MIMO).
Еще в одном аспекте изобретение также относится к машиночитаемому носителю, на котором сохранена компьютерная программа, которая при выполнении процессором побуждает процессор выполнять этапы способа обнаружения объектов посредством радара с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO) по первому аспекту настоящего изобретения.
Следует понимать, что изобретение может также быть реализовано и в других формах, в том числе в форме таких объектов, как компьютерная программа, компьютерный программный продукт, устройство обнаружения объектов (радар), а также различные способы, реализуемые аппаратными и программными средствами или любым их возможным сочетанием в рамках изобретательского замысла, раскрытого в настоящей заявке.
Краткое описание чертежей
Чертежи приведены в настоящем документе для облегчения понимания сущности настоящего изобретения. Чертежи являются схематичными и выполнены не в масштабе. Чертежи служат исключительно в качестве иллюстрации и не предназначены для определения объема настоящего изобретения.
На Фиг. 1 схематично проиллюстрирован массив приемных и передающих элементов антенны MIMO из уровня техники;
На фиг. 2 схематично проилюстрирован массив приемных и передающих элементов антенны MIMO согласно изобретению;
На Фиг. 3 показана блок–схема способа обнаружения объектов посредством радара с массивом приемных и передающих элементов MIMO согласно одному варианту выполнения изобретения;
На Фиг. 4 показана блок–схема способа обнаружения объектов посредством радара с массивом приемных и передающих элементов MIMO согласно другому варианту выполнения изобретения;
На Фиг. 5 показана блок–схема способа обнаружения объектов посредством радара с массивом приемных и передающих элементов MIMO согласно еще одному варианту выполнения изобретения.
Осуществление изобретения
Предлагаемое изобретение относится к области навигации автономно управляемых транспортных средств и подвижных роботов и может быть использовано, в качестве неограничивающего примера, в системах навигации автономных транспортных средств, системах помощи при парковке автомобилей, беспилотных летательных аппаратах, а также в различных подвижных устройствах бытового назначения, таких как, например, робот–пылесос. Примеры реализации настоящего изобретения будут раскрыты ниже на примере робота–пылесоса, который автоматически перемещается в пространстве помещения, обходя препятствия, которые обнаруживаются его сенсорами. Следует понимать, что данный пример служит лишь для наглядной иллюстрации изобретения и не должен рассматриваться как ограничивающий его объем или указывающий на предпочтительный вариант выполнения изобретения.
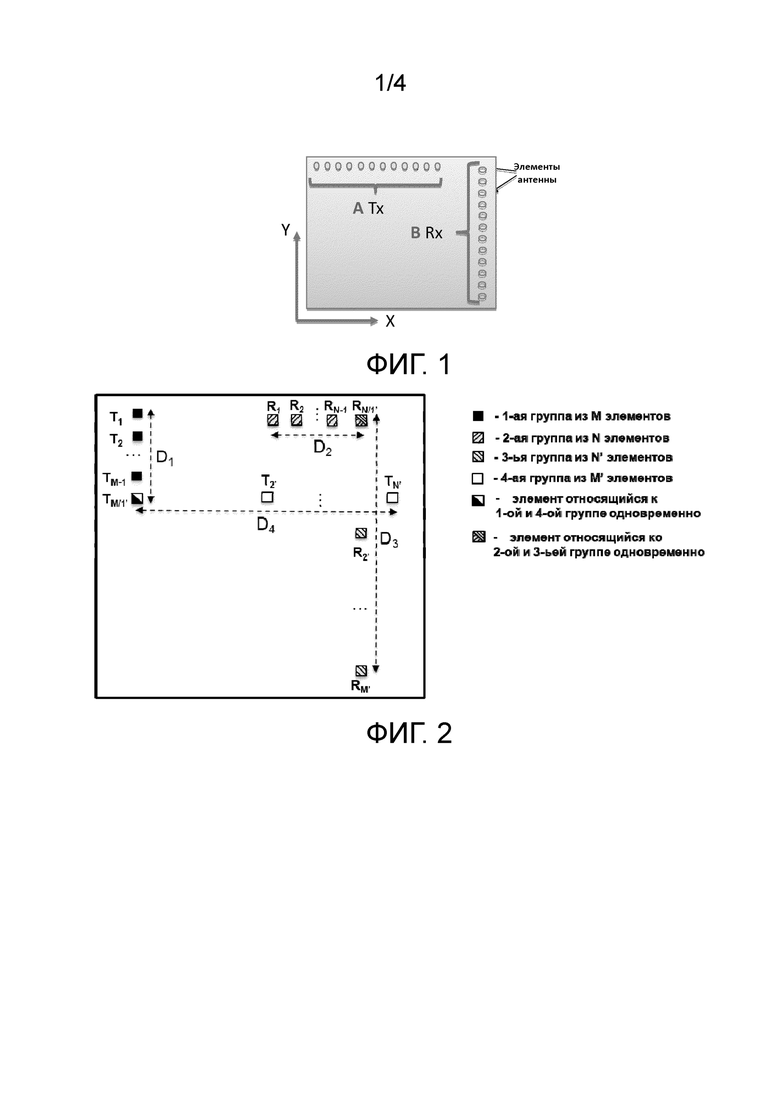
В уровне техники для достижения разрешения α° x β° в направлениях X и Y необходим массив («решетка») MIMO из A x B элементов, где A – количество приемных (передающих) элементов в направлении X, причем расстояние между первым и последним элементами составляет DA (D также называют апертурой «решетки»), а B – количество передающих (приемных) элементов в направлении Y, причем расстояние между первым и последним элементами составляет DB. В этом случае время обработки для формирования команд управления положением диаграммы направленности будет пропорционально ~A*B, так как программе–обработчику данных необходимо провести вычислительные операции с каждым источником сигнала А при всех приемниках сигнала B с заданным шагом по углу и заданному полю обзора. Например, для достижения разрешения около 2° x 2° требуется около 256 (A x B =16×16) виртуальных каналов для поля обзора в 90° x 30° при расстоянии элементов в λ/2, где λ – несущая частота радара, что приводит к высокой ресурсоемкости обработки. Соответственно, время на обработку данных будет пропорционально произведению количества каналов (16х16=256).
В связи с этим, предлагаемое изобретение предусматривает уменьшение необходимого количества каналов до 12 и сокращения времени на вычисления до пропорционального 40, что в 3,6 раза меньше, чем в известных решениях из уровня техники.
Для решения задачи настоящего изобретения предусматривается использование радара с массивом приемных и передающих элементов MIMO с меньшим количеством элементов антенны, и с уменьшением времени обработки.
Уменьшение времени обработки согласно изобретению обеспечивается следующим образом. В уровне техники для массива приемных и передающих элементов АхВ время обработки данных пропорционально АхВ. Согласно изобретению, чтобы получить в одной плоскости такое же разрешение, как при количестве элементов А, на втором этапе формирования диаграммы направленности используется подмассив приемных (передающих) элементов в одной (горизонтальной или вертикальной) плоскости, который при произведении элементов N’xN обеспечивает число порядка А: N’xN=A. Аналогичным образом, на третьем этапе формирования диаграммы направленности используется подмассив приемных (передающих) элементов в другой плоскости, что дает MxM’=B. Вычисление при формировании диаграммы направленности с низким разрешением на первом этапе формирования диаграммы направленности пропорционально MxN. Таким образом, общее время вычисления при обработке данных за три этапа формирования диаграммы направленности пропорционально MxN+N’xN+MxM’, или AB*(1/(N’xN)+1/(MxM’)+1/(M’xN’)). В результате, уменьшение времени вычисления по сравнению с обработкой массива АхВ будет пропорционально обратной величине (1/(N’xN)+1/(MxM’)+1/(M’xN’)).
Для этого, согласно изобретению, топология массива MIMO приемных и передающих элементов конфигурируется в три «подмассива», которые реализуют трехступенчатый алгоритм формирования диаграммы направленности.
Первый подмассив представляет собой массив низкого разрешения с M приемными (передающими) элементами в вертикальной плоскости и N передающими (приемными) элементами в горизонтальной плоскости. Второй подмассив представляет собой массив высокого разрешения в горизонтальной плоскости N’ приемными (передающими) элементами и N передающими (приемными) элементами в горизонтальной плоскости, которые формируют результирующий массив NxN’. Третий подмассив представляет собой массив высокого разрешения в вертикальной плоскости с M приемными (передающими) и M’ передающими (приемными) элементами в вертикальной плоскости, которые формируют результирующий массив MxM’. Изменение конфигурации «подмассивов» осуществляется путем включения/выключения требуемых каналов передачи/приема или путем переключения между существующими источниками излучения.
Более конкретно, изобретение относится к системе навигации подвижного робота, содержащей массив приемных и передающих элементов с множеством входов и множеством выходов (MIMO) для обнаружения препятствий в пространстве. Для ускорения обработки данных при формировании диаграммы направленности радара с повышенной точностью согласно изобретению предлагается трехступенчатая схема формирования диаграммы направленности, в которой на первом этапе выполняется формирование диаграммы направленности с низким разрешением, на втором этапе – формирование диаграммы направленности с высоким разрешением в вертикальной плоскости, и/или на третьем этапе – формирование диаграммы направленности с высоким разрешением в горизонтальной плоскости.
Чтобы сформировать маршрут движения, роботу необходимо иметь достаточно точный «образ» окружающего его пространства, включая препятствия, которые необходимо обойти или, например, под которыми возможно проехать. Согласно изобретению, сначала система обнаруживает препятствие в определенной точке пространства, а затем определяет границы препятствия в горизонтальном и вертикальном направлениях для принятия решения о том, может ли робот обойти данное препятствие и/или проехать под ним. На примере робота–пылесоса речь может идти об обнаружении предметов мебели и определении их границ для того, чтобы система навигации робота могла принимать решение, например, о том, может ли робот проехать между вертикальных опор предмета мебели.
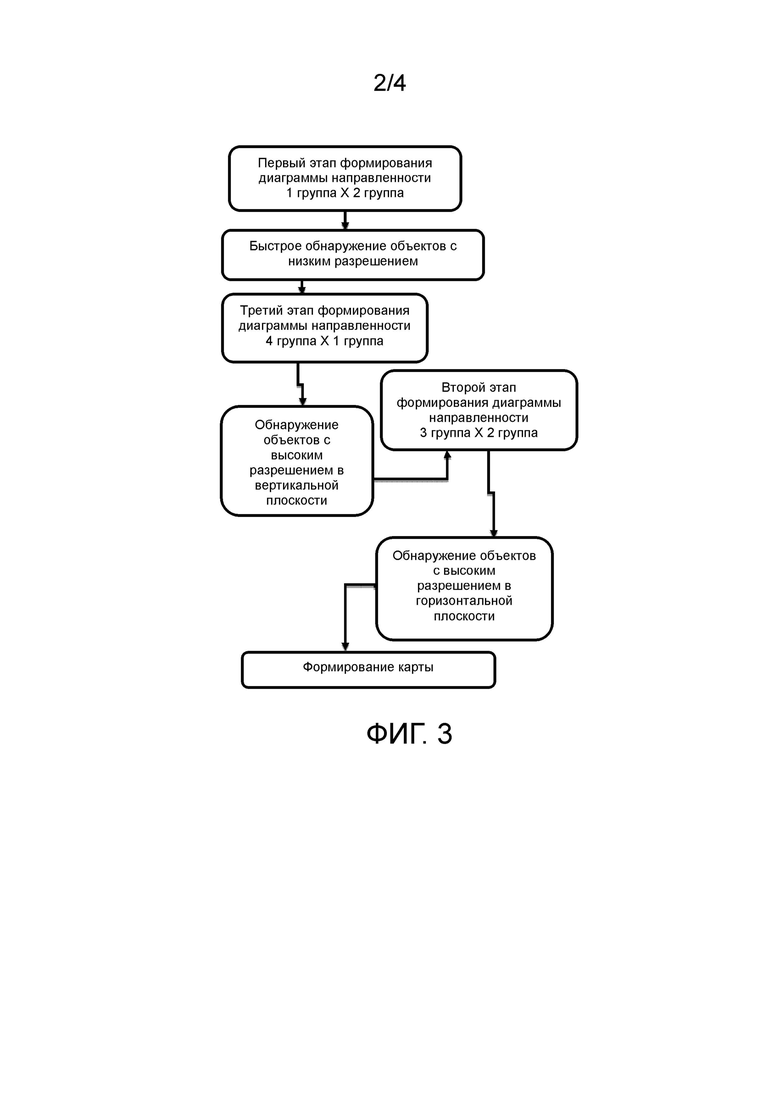
Обращаясь к Фиг. 3–5, иллюстрирующим некоторые примерные варианты выполнения способа обнаружения объектов посредством радара с массивом приемных и передающих элементов MIMO согласно изобретению, на первом этапе применяется массив MIMO приемных и передающих элементов с низким разрешением для обнаружения препятствия, а также обнаружения точек, в которых необходимо повысить разрешение. На втором этапе применяется горизонтальный массив MIMO приемных и передающих элементов с высоким разрешением, а на третьем этапе применяется вертикальный массив MIMO приемных и передающих элементов с высоким разрешением, после чего на основании полученных данных в вертикальном направлении (‘h’) и горизонтальном направлении (‘s’) формируется «карта» препятствия с высоким разрешением, на основании которой система навигации формирует маршрут движения робота с учетом данного препятствия.
В качестве неограничивающего примера, на основе целого массива MIMO приемопередающих элементов, составляющих антенну, на различных этапах алгоритма формируются четыре группы приемопередающих элементов:
первая группа – расположенные по вертикали M приемных (передающих) элементов, используемые для формирования диаграммы направленности в первом и третьем вышеупомянутых «подмассивах» MIMO, причем расстояния между первым и последним элментом равно D1;
вторая группа – расположенные по горизонтали N передающих (приемных) следующие друг за другом по горизонтали лементов, используемые для формирования диаграммы направленности в первом и втором вышеупомянутых «подмассивах» MIMO, причем расстояния между первым и последним элментом равно D2;
третья группа – расположенные по горизонтали N’ приемных (передающих) элементов, используемые для формирования диаграммы направленности во втором вышеупомянутом «подмассиве» MIMO, причем расстояния между первым и последним элментом равно D3; и
четвертая группа – расположенные по вертикали M’ передающих (приемных) элементов, используемые для формирования диаграммы направленности в третьем вышеупомянутом «подмассиве» MIMO, причем расстояния между первым и последним элментом равно D4.
В одном неограничивающем варианте выполнения, упомянутая третья группа содержит следующие друг за другом по горизонтали 2 приемопередающих элемента, используемые для формирования диаграммы направленности во втором упомянутом «подмассиве» MIMO, а четвертая группа содержит следующие друг за другом по вертикали 2 приемопередающих элемента, используемые для формирования диаграммы направленности в третьем упомянутом «подмассиве» MIMO. При этом функция по меньшей мере одного из упомянутых приемопередающих элементов изменяется с приемной на передающую или наоборот, делая данный элемент компонентом упомянутой третьей группы или упомянутой четвертой группы, при помощи переключателя или коммутатора.
В различных вариантах выполнения изобретения, состав элементов антенны радара MIMO, работающих на передачу или прием в конкретный момент времени, может быть различным. В качестве неограничивающего примера, первая и третья описанные выше группы могут функционировать в качестве передатчиков, а вторая и четвертая описанные выше группы могут функционировать в качестве приемников. В другом варианте выполнения, первая и третья описанные выше группы могут функционировать в качестве приемников, а вторая и четвертая описанные выше группы могут функционировать в качестве передатчиков. При этом, как указано выше, функция по меньшей мере одного из приемных и/или передающих элементов изменяется с приемной на передающую или наоборот, делая данный элемент компонентом упомянутой третьей группы или упомянутой четвертой группы, при помощи переключателя или коммутатора.
На Фиг. 1 с целью иллюстрации показана топология массива антенных элементов MIMO согласно уровню техники, где массив AxB представлен A передающими элементами (Tx) по горизонтали и B приемными элементами (Rx) по вертикали. Следует отметить, что данная конфигурация (передающие элементы по горизонтали и приемные элементы по вертикали) не является обязательной, и возможны другие варианты конфигурации в зависимости от конкретного этапа формирования диаграммы направленности радара.
На Фиг. 2 представлено схематичное изображение массива приемных (R) и передающих (T) элементов антенны MIMO согласно изобретению. Следует отметить, что конкретные расстояния между приемными элементами и/или между передающими элементами не имеют значения для реализации настоящего изобретения и определяются по существу лишь параметрами конкретных приемных/передающих элементов, используемых в данной реализации изобретения, общими размерами массива элементов антенны, технологическими ограничениями и допусками в каждой конкретной реализации и т.п. Следует отметить, что для получения разрешения по вертикали, соответствующего разрешению массива с количеством элементов В и апертурой DB в массиве АхВ из уровня техники, сумма расстояний между элементами описанной выше первой группы и сумма расстояний между элементами описанной выше четвертой группы должны быть суммарно равны упомянутой апертуре DB, а для получения разрешения по горизонтали, соответствующего разрешению массива с количеством элементов A и апертурой DA в массиве АхВ из уровня техники, сумма расстояний между элементами описанной выше второй группы и сумма расстояний между элементами описанной выше третьей группы должны быть суммарно равны упомянутой апертуре DA, то есть:
D1+D3=DB
D2+D4=DA
В различных вариантах выполнения передающие и приемные элементы имеют различную структуру и конфигурацию, например, они могут быть образовывать участки различных форм («патчи»), полосы, криволинейные участки, цепочки возбужденных элементов и тому подобные структуры для увеличения или уменьшения поля обзора. Передающие и приемные элементы антенны могут быть реализованы на различных печатных платах (PCB) и различных материалах. Радар с массивом MIMO может быть расположен в любом подходящем месте на транспортном средстве, в качестве примера, но не ограничения – на передней, задней, правой, левой, верхней или нижней поверхности транспортного средства, такого как робот, автомобильное транспортное средство или беспилотный летательный аппарат.
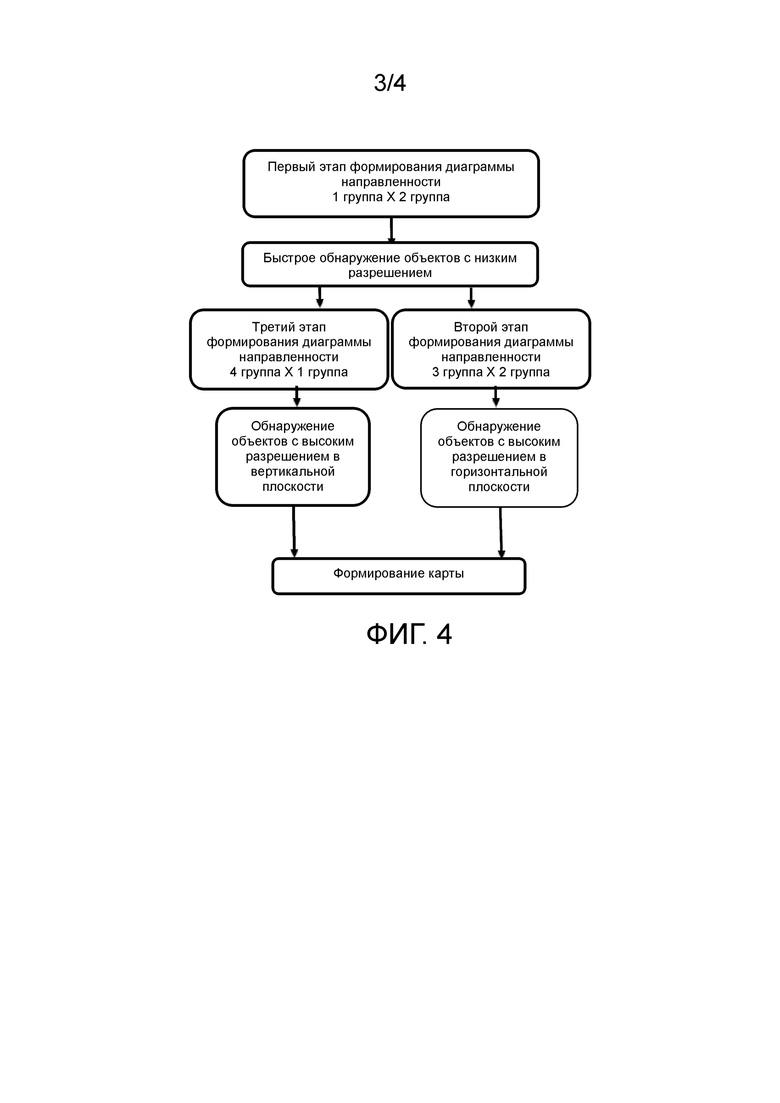
Обращаясь вновь к Фиг. 3–5, алгоритм работы массива MIMO приемных и передающих элементов радара может быть организован следующим образом. На первом этапе может осуществляться формирование диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих (приемных) элементов по вертикали и N приемных (передающих) элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM. Далее осуществляется второй этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных (передающих) элементов и N’ передающих (приемных) элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’ по горизонтали. Далее осуществляется третий этап третий этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих (приемных) элементов по вертикали и M’ приемных (передающих) элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали. При этом второй и третий этапы формирования диаграммы направленности могут выполняться последовательно (см., например, Фиг. 3), при этом возможна и обратная последовательность, т.е. может выполняться сначала третий этап формирования диаграммы направленности, а затем второй этап формирования диаграммы направленности, либо по существу одновременно, независимо друг от друга (см., например, Фиг. 4), в зависимости от конкретного варианта реализации и/или от конкретных характеристик и возможностей массива элементов антенны радара MIMO.
На основании результатов обнаружения объектов с высоким разрешением в вертикальной и горизонтальной плоскостях может формироваться карта окружения транспортного средства, на которой содержатся обнаруженные объекты, или могут приниматься решения по управлению движением транспортного средства с учетом обнаруженных объектов.
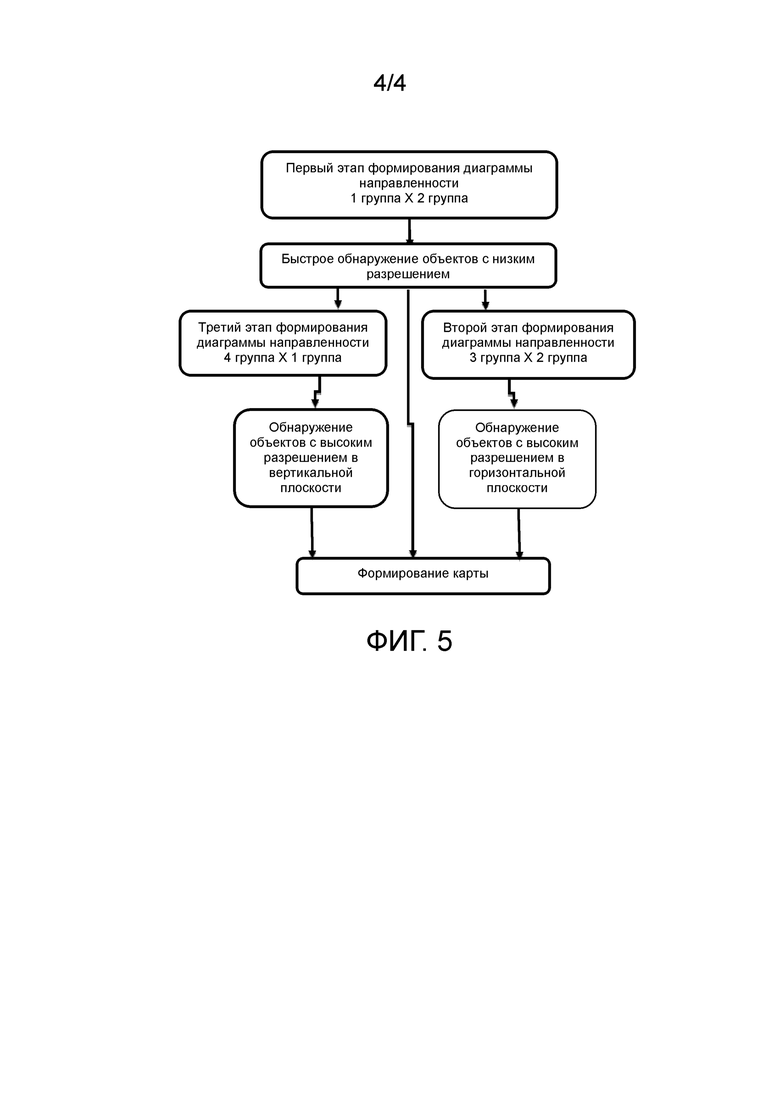
В других вариантах выполнения при упомянутом формировании карты или принятии решения по управлению движением помимо результатов обнаружения объектов с высоким разрешением в вертикальной и горизонтальной плоскостях могут также использоваться данные обнаружения объектов с низким разрешением, полученные на первом этапе формирования диаграммы направленности (см., например, Фиг. 5).
В результате, в сравнении с общим массивом MIMO приемных и передающих элементов антенны из уровня техники, содержащим A передающих элементов и B приемных элементов, в соответствии с предлагаемым решением требуется меньшее количество источников излучения, при этом требуемое время обработки при массиве MxN элементов согласно изобретению сокращается в (1/(N’xN)+1/(MxM’)+1/(M’xN’)) раз, в качестве неограничивающего примера, показанного выше – в 3,6 раза.
Согласно аспекту изобретения, предложена система навигации подвижного робота, содержащая радар с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), реализующий описанные выше этапы формирования диаграммы направленности излучения элементов антенны радара и получения таким образом данных об одном или более объектах, обнаруживаемых радаром, а также процессор, выполненный с возможностью формирования карты обнаруженного объекта на основании результатов обнаружения посредством по меньшей мере одной из упомянутых диаграмм направленности и принятия решений по управлению подвижным роботом на основании упомянутой карты обнаруженного объекта. Следует отметить, что понятие «робот» в контексте настоящего изобретения следует понимать в наиболее широкой возможной интерпретации, и, в частности, настоящее изобретение может быть реализовано в различных подвижных устройствах, управление которыми может осуществляться по меньшей мере частично в автоматическом режиме с учетом данных об одном или более объектах, обнаруживаемых радаром. В качестве неограничивающего примера, изобретение может быть реализовано в транспортных средствах, таких как автономно управляемые автомобили, или в автомобильных системах помощи при парковке и/или помощи при вождении, где требуется обнаружение препятствий посредством радара и может быть реализована возможность по меньшей мере частично автоматического управления движением транспортного средства. Кроме того, настоящее изобретение может быть использовано в беспилотных летательных аппаратах или в водных транспортных средствах с автономным управлением. Другой возможный вариант реализации изобретения может применяться в автоматических подвижных бытовых устройствах, таких как, в качестве неограничивающего примера, робот–пылесос. Специалистам в данной области техники будут очевидны различные варианты реализации настоящего изобретения, отличные от описанных в явном виде в материалах настоящей заявки. Все такие возможные варианты реализации подразумеваются включенными в объем правовой охраны настоящего изобретения.
В качестве примера, при использовании заявляемой системы в управлении подвижным роботом, радар с массивом элементов MIMO согласно изобретению может использоваться для формирования карты объектов в окружении робота. При этом карта обнаруженных объектов отображает границы одного или более объектов не только в горизонтальной плоскости, но и в вертикальной плоскости, что позволяет с большей гибкостью принимать решения по управлению движением робота с учетом возможного наличия свободного пространства не только за пределами точно определяемых внешних границ одного или более объектов в горизонтальной плоскости, но и точно определяемых границ объекта в вертикальной плоскости, что позволяет учитывать, например, возможное наличие проемов под объектом, в которых может перемещаться робот. Точность обнаружения объектов и разрешение, с которым определяются границы объекта по горизонтали и по вертикали, позволяет применять систему согласно изобретению, например, при управлении полетом беспилотного летательного аппарата с учетом таких трудно обнаруживаемых препятствий, как опоры и провода линий электропередач, ветви деревьев и т.п.
В общем случае, управление роботом осуществляется одним или более процессорами, которые могут входить в состав системы согласно изобретению и/или могут быть внешними по отношению к заявляемой системе и действовать на основании данных, формируемых системой согласно изобретению. Некоторые или все из упомянутых одного или более процессоров могут быть входить в состав робота и/или могут быть расположены в одном или более удаленных местоположениях по отношению к нему. При этом упомянутые один или более процессоров могут функционировать под управлением одной или более программ, которые могут быть сохранены на одном или более постоянных машиночитаемых носителях, входящих в состав робота и/или внешних по отношению к нему, в том числе на энергозависимых и/или энергонезависимых машиночитаемых носителях, в частности таких, как одно или более постоянных запоминающих устройств, оперативных запоминающих устройств, электронно стираемых программируемых постоянных запоминающих устройств, флэш–памяти и т.п. Одна или более программ могут представлять собой программное обеспечение, микропрограммное обеспечение, исполняемый код и т.п., как известно специалистам в данной области техники. Кроме того, одна или более программ могут передаваться посредством различных проводных и/или беспроводных сетей передачи данных, как известно специалистам в данной области техники. Изобретение не ограничено конкретным описанным в явном виде сочетанием аппаратных и программных средств, а может быть реализовано посредством различных сочетаний аппаратных и программных средств, которые будут очевидны специалистам в данной области техники при прочтении настоящего описания.
На основании карты одного или более обнаруживаемых объектов один или более процессоров принимают решения по управлению движением робота и передают команды на соответствующие средства управления движением робота, такие как, в качестве неограничивающего примера, блоки управления одним или более моторами или двигателями, блоки управления поворотом одного или более колес, блоки управления рулями направления и/или высоты, в зависимости от конкретной конфигурации робота или автоматически управляемого транспортного средства, в котором реализована система согласно изобретению. На основании упомянутых команд выполняется изменение направления и/или скорости движения робота или автоматически управляемого транспортного средства с целью объезда внешних границ одного или более обнаруженных препятствий или проезда/пролета под одним или более обнаруженных препятствий при обнаружении свободного пространства под упомянутыми препятствиями, достаточного для движения робота или автоматически управляемого транспортного средства. Специалистам в данной области техники будут очевидны различные алгоритмы управления движением робота или автоматически управляемого транспортного средства на основании карты препятствий, получаемой посредством радара MIMO согласно изобретению. Кроме того, в дополнение к упомянутой карте препятствий при принятии решений по управлению роботом или автоматически управляемым транспортным средством могут учитываться данные из других источников, таких как различные датчики, распознающие параметры окружения и/или движения робота или автоматически управляемого транспортного средства, одна или более систем определения местоположения (GPS, GNSS, ГЛОНАСС, GALILEO и т.п.), одна или более камер, снимающих изображение в видимом свете и/или в инфракрасном диапазоне и т.п., как известно специалистам в данной области техники.
В частности, в применении заявляемой системы в бытовом подвижном автоматическом устройстве, таком как робот–пылесос, применение радара согласно изобретению позволяет обнаруживать не только препятствия, но и, например, лужи разлитой на полу жидкости, на основании чего робот может двигаться таким образом, чтобы избежать попадания в лужи, либо, напротив, чтобы устранить их, с возможностью оценки полноты их устранения и принятием решения о повторном прохождении соответствующего участка или о прекращении движения по нему также посредством радара и системы согласно изобретению. В другом варианте выполнения, радар MIMO и система согласно изобретению может позволять роботу–пылесосу определять тип покрытия пола и принимать решение о движении только в пределах области с тем или иным покрытием в зависимости от заданных пользовательских установок. Кроме того, изобретение позволяет роботу–пылесосу двигаться под различными предметами мебели и другими препятствиями без риска застревания под ними.
В применении в автономно управляемых транспортных средствах либо в системах помощи при вождении/парковке транспортных средств, таких как автомобили, система согласно изобретению позволяет более точно обнаруживать препятствия и помехи движению, такие как другие транспортные средства, пешеходы, элементы дорожной инфраструктуры, а также дефекты дорожного покрытия, дорожную разметку и т.п., и принимать решения по управлению движением транспортного средства с учетом результатов обнаружения.
В применении в беспилотных летательных аппаратах система согласно изобретению позволяет распознавать такие препятствия, как мосты и их опоры, столбы и провода линии электропередач, ветви деревьев, подвижные объекты, такие как летательные аппараты или птицы, и принимать решения по управлению движением беспилотного летательного аппарата с учетом результатов обнаружения.
Специалистам в данной области техники будет понятно, что выше описаны и показаны на чертежах лишь некоторые из возможных примеров технических приемов и материально–технических средств, которыми могут быть реализованы варианты выполнения настоящего изобретения. Приведенное выше подробное описание вариантов выполнения изобретения не предназначено для ограничения или определения объема правовой охраны настоящего изобретения.
Другие варианты выполнения, которые могут входить в объем настоящего изобретения, могут быть предусмотрены специалистами в данной области техники после внимательного прочтения вышеприведенного описания с обращением к сопровождающим чертежам, и все такие очевидные модификации, изменения и/или эквивалентные замены считаются входящими в объем настоящего изобретения. Все источники из уровня техники, приведенные и рассмотренные в настоящем документе, настоящим включены в данное описание путем ссылки, насколько это применимо.
При том, что настоящее изобретение описано и проиллюстрировано с обращением к различным вариантам его выполнения, специалистам в данной области техники будет понятно, что в нем могут быть выполнены различные изменения в его форме и конкретных подробностях, не выходящие за рамки объема настоящего изобретения, который определяется только нижеприведенной формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННАЯ РЕШЕТКА МИЛЛИМЕТРОВОГО ДИАПАЗОНА ДЛЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ ТРЕХМЕРНОЙ ВИЗУАЛИАЦИИ | 2018 |
|
RU2682174C1 |
| МНОГОРЕЖИМНЫЙ РАДИОЧАСТОТНЫЙ ДАТЧИК | 2019 |
|
RU2721587C1 |
| АНТЕННАЯ РЕШЕТКА MIMO С ШИРОКИМ УГЛОМ ОБЗОРА | 2018 |
|
RU2695934C1 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| Способ обработки цифрового радиолокационного сигнала и радиолокатор обнаружения препятствий высокого разрешения | 2022 |
|
RU2792971C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| ТРЕХМЕРНАЯ СИСТЕМА ГОЛОГРАФИЧЕСКОГО РАДИОВИДЕНИЯ ДЛЯ ДОСМОТРА | 2017 |
|
RU2652530C1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| Способ и процессор для классификации точек на границе многоугольного участка | 2023 |
|
RU2836700C1 |
| СЕНСОР SPR (РАДАР ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ) ДЛЯ ПОМОЩИ В ОСУЩЕСТВЛЕНИИ НАВИГАЦИИ ТЕХНИЧЕСКОГО УСТРОЙСТВА | 2019 |
|
RU2727087C1 |
Изобретение относится к области навигации автономно управляемых транспортных средств и подвижных роботов. Технический результат заключается в сокращении времени обработки данных при обнаружении препятствий и/или формировании карты препятствий в системе навигации робота или автономно управляемого транспортного средства. Способ обнаружения объектов посредством радара с массивом приемных и передающих элементов MIMO содержит формирование первой диаграммы направленности посредством массива приемных и передающих элементов, содержащего M элементов по вертикали и N элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM; формирование второй диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных (передающих) элементов и N’ передающих (приемных) элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’ по горизонтали; формирование третьей диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих (приемных) элементов по вертикали и M’ приемных (передающих) элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали; и формирование карты обнаруженного объекта на основании результатов обнаружения посредством по меньшей мере одной из упомянутых диаграмм направленности. Также предложена система навигации подвижного робота, содержащая радар, реализующий упомянутый способ, и процессор, выполненный с возможностью формирования карты обнаруженного объекта и принятия решений по управлению подвижным роботом на основании упомянутой карты обнаруженного объекта. Технический результат состоит в сокращении времени обработки данных при обнаружении препятствий и/или формировании карты препятствий в системе навигации робота или автономно управляемого транспортного средства. 3 н. и 6 з.п. ф-лы, 5 ил.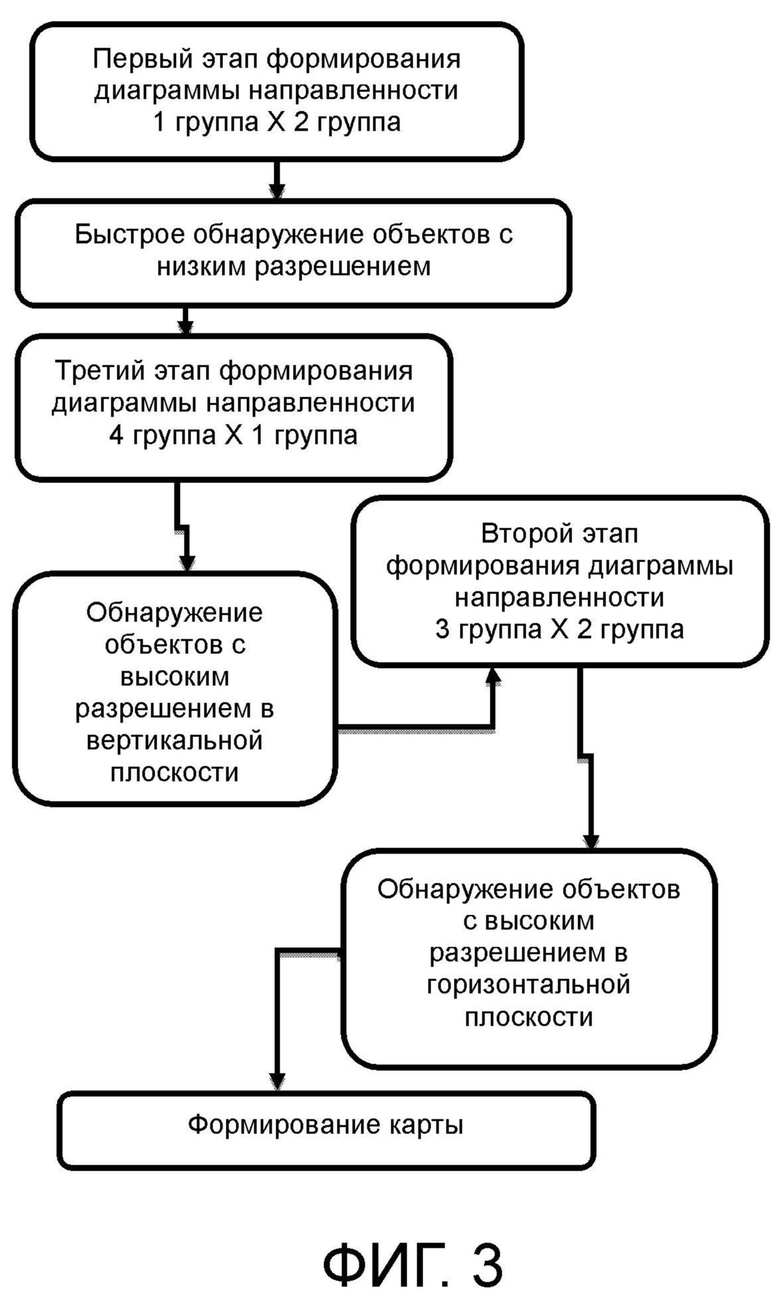
1. Способ обнаружения объектов посредством радара с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), причем способ содержит:
первый этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и N приемных или передающих элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM;
второй этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных или передающих элементов и N’ передающих или приемных элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’по горизонтали;
третий этап формирования диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и M’ приемных или передающих элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали; и
этап формирования карты обнаруженного объекта на основании результатов обнаружения на по меньшей мере одном из упомянутых этапов формирования диаграммы направленности.
2. Способ по п. 1, в котором второй этап формирования диаграммы направленности и третий этап формирования диаграммы направленности выполняются одновременно и/или параллельно.
3. Способ по п. 1, в котором на этапе формирования карты обнаруженного объекта формируют карту обнаруженного объекта на основании результатов обнаружения на первом, втором и третьем этапах формирования диаграммы направленности.
4. Способ по п. 1, в котором на втором этапе формирования диаграммы направленности и/или третьем этапе формирования диаграммы направленности формируют диаграмму направленности в интересующей области, в которой находится объект, обнаруженный в результате первого этапа диаграммы направленности, при этом интересующая область меньше общего поля обзора массива приемных и передающих элементов с множеством входов и множеством выходов (MIMO).
5. Система навигации подвижного робота, содержащая:
радар с массивом приемных и передающих элементов с множеством входов и множеством выходов (MIMO), при этом радар выполнен с возможностью:
формирования первой диаграммы направленности посредством массива приемных и передающих элементов, содержащего M элементов по вертикали и N элементов по горизонтали, при этом выполняется быстрое обнаружение объектов с низким разрешением за счет формирования результирующего массива NxM;
формирования второй диаграммы направленности посредством массива приемных и передающих элементов, содержащего N приемных или передающих элементов и N’ передающих или приемных элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в горизонтальной плоскости за счет формирования результирующего массива NxN’по горизонтали;
формирования третьей диаграммы направленности посредством массива приемных и передающих элементов, содержащего M передающих или приемных элементов по вертикали и M’ приемных или передающих элементов по горизонтали, при этом выполняется обнаружение объектов с высоким разрешением в вертикальной плоскости за счет формирования результирующего массива M’xM по вертикали;
процессор, выполненный с возможностью:
формирования карты обнаруженного объекта на основании результатов обнаружения посредством по меньшей мере одной из упомянутых диаграмм направленности; и
принятия решений по управлению подвижным роботом на основании упомянутой карты обнаруженного объекта.
6. Система по п. 5, в которой вторая диаграмма направленности и третья диаграмма направленности формируются одновременно и/или параллельно.
7. Система по п. 5, в которой процессор выполнен с возможностью формирования карты обнаруженного объекта на основании результатов обнаружения на первом, втором и третьем этапах формирования диаграммы направленности.
8. Система по п. 5, в которой вторая диаграмма направленности и/или третья диаграмма направленности формируются в интересующей области, в которой находится объект, обнаруженный посредством первой диаграммы направленности, при этом интересующая область меньше общего поля обзора массива приемных и передающих элементов с множеством входов и множеством выходов (MIMO).
9. Машиночитаемый носитель, на котором сохранена компьютерная программа, которая при выполнении процессором побуждает процессор выполнять этапы способа по любому из пп. 1–4.
| US 2018356506 A1, 13.12.2018 | |||
| АНТЕННАЯ РЕШЕТКА MIMO С ШИРОКИМ УГЛОМ ОБЗОРА | 2018 |
|
RU2695934C1 |
| АНТЕННАЯ РЕШЕТКА МИЛЛИМЕТРОВОГО ДИАПАЗОНА ДЛЯ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ ТРЕХМЕРНОЙ ВИЗУАЛИАЦИИ | 2018 |
|
RU2682174C1 |
| US 2016285172 А1, 29.09.2016 | |||
| US 2012050091 A1, 01.03.2012. | |||

