Настоящие изобретения относятся к области видеонаблюдения и распознавания объектов, а именно, к способам видеосъемки телекамерой, установленной на наклонно-поворотной платформе, и может применяться в системах видеонаблюдения.
В настоящее время при осуществлении сканирования (видеосъемки) территории, известные из уровня техники телекамеры с удаленным управлением направлением видеосъемки и увеличением, циклически «обходят» позиции видеосъемки, предварительно заданные оператором, останавливаются в каждой позиции на заданное время, при этом транслируют видеоизображение, сформированное в этой позиции, с выбранным увеличением. Данный способ видеосъемки является стандартным и используется практически во всех существующих моделях купольных поворотных телекамер.
Преимуществом способа видеосъемки в предварительно заданных позициях является возможность охватить большую территорию видеосъемки и получить изображения в каждой позиции с хорошей детализацией. Недостатком данного способа является наличие слепой зоны во всех позициях кроме текущей и постоянное изменение фона сцены, что затрудняет анализ видеоизображения видеоаналитическими автоматическими методами и оператором. Кроме того, в режиме осуществления видеосъемки в предварительно заданных позициях сложно распознать медленные изменения сцены видеосъемки за короткий временной интервал нахождения телекамеры в каждой позиции. Для устранения этих недостатков используют внешний вычислитель, который полностью управляет телекамерой. Однако, использование внешнего вычислителя серьезно увеличивает нагрузку на каналы передачи данных от телекамеры к вычислителю, и повышает требования к вычислительной мощности вычислителя, вследствие необходимости выполнения с помощью него кодирования и раскодирования видеопотока. Вдобавок некоторые алгоритмы видеоаналитики не работают или плохо работают с предварительно сжатым видеопотоком по причине наличия на видеоизображении невидимых глазу, но присутствующих артефактах сжатия.
Наиболее близким к заявленному изобретению является способ видеосъемки поворотной телекамерой, описанный в патенте CN 106331653, в котором формируют видеоизображение при движении камеры по заранее заданному маршруту с остановками, в заранее заданных позициях. В этих позициях маршрута производят захват кадров видеопотока. Во внешнем вычислителе из захваченных кадров формируют единое изображение. На следующем проходе по заранее заданному маршруту осуществляют обновление изображения. Таким образом, во внешнем вычислителе формируют видеопоток с низкой частотой кадров. Частота кадров итогового видеопотока определяется скоростными возможностями поворотной телекамеры и вычислительными возможностями внешнего вычислителя. Для большого круга задач по организации видеонаблюдения на стационарных объектах такой частоты кадров достаточно. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатком способа видеосъемки прототипа заявленного изобретения является требуемая высокая мощность внешних вычислителей, а также высокое качество и пропускная способность канала передачи данных от телекамеры до внешнего вычислителя, что усложняет конструкцию телекамеры и способ ее функционирования, и соответственно, удорожает их.
Техническим результатом заявленного изобретения является создание более простого и дешевого способа видеосъемки телекамерой, установленной на наклонно-поворотной платформе, за счет использования встроенного в телекамеру вычислителя, который управляет движением наклонно-поворотной платформы по заданному маршруту, при этом формирует единое панорамное видеоизображение, а также выявляет и распознает объекты на каждом кадре видеоизображения.
Поставленный технический результат достигнут путем создания способа видеосъемки телекамерой, установленной на наклонно-поворотной платформе, в котором
- задают, в блоке 6 формирования маршрута, набор положений наклонно-поворотной платформы 12;
- формируют, с помощью блока 6 формирования маршрута, сигналы управления трансфокатором 11, последовательность сигналов управления движением наклонно-поворотной платформой 12 по заданным положениям, сигналы включения или выключения блока 2 вычитания фона, координаты 30 текущего положения наклонно-поворотной платформы 12, а также сигналы сохранения видеокадров в блоке 3 накопления фона в соответствии с текущим положением наклонно-поворотной платформы 12;
- формируют, с помощью видеосенсора 1, основной видеопоток и передают его блок 3 накопления фона, блок 2 вычитания фона, блок 4 наложения маски, блок 7 наложения служебной видеоинформации;
- сохраняют, с помощью блока 3 накопления фона, видеокадры и соответствующие им положения наклонно-поворотной платформы 12 по сигналам захвата кадра, поступающим от блока 6 формирования маршрута и передают их в блок 2 вычитания фона;
- формируют, с помощью блока 2 вычитания фона, разностную маску текущего видеокадра, полученного от видеосенсора 1, и предшествующего видеокадра, полученного от блока 3 накопления фона, в соответствии с данными о текущем положении наклонно-поворотной платформы 12, полученными от блока 6 формирования маршрута, и передают разностную маску в блок 4 наложения маски;
- формируют, с помощью блока 4 наложения маски, видеокадр с наложенной разностной маской, в областях с выявленным движением накладываем маску таким образом, чтобы данная область была выделена, как зона, где потенциально может находиться целевой объект, остальную часть кадра выделяем как зону, предположительно, не содержащую целевых объектов, и передают полученный видеокадр в блок 5 распознавания объектов;
- распознают, с помощью блока 5 распознавания объектов, объекты на видеокадрах и передают данные распознанных объектов и их параметры в блок 8 принятия решения/формирования метаданных;
- принимают решение о выделении или игнорировании объекта, с помощью блока 8 принятия решения и формирования метаданных, на основе данные распознанных объектов и их параметров, полученных от блока 5 распознавания оценок соответствия объекта, при этом, в случае принятия решения о выделении объекта, формируют потоки метаданных распознанных объектов на основе координат текущего положения наклонно-поворотной платформы 12, полученных от блока 6 формирования маршрута и передают сформированные потоки метаданных распознанных объектов в блок 10 формирования тревог, блок 7 наложения служебной видеоинформации и блок 15 коммуникаций;
- накладывают на распознанные объекты рамки и служебную визуальную информацию об объекте, с помощью блока 7 наложения служебной видеоинформации, на основе потоков метаданных распознанных объектов, и передают метаданные с наложенными рамками и служебной визуальной информацией об объекте в видеокодек 9;
- формируют заданное количество сжатых с заданным разрешением видеопотоков, с помощью видеокодека 9, в соответствии с заданным режимом работы телекамеры и передают сжатые видеопотоки в блок 13 формирования видеопотоков;
- формируют, с помощью блока 13 формирования видеопотоков, сжатые видеопотоки для трансляции потребителю в виде потоков протокола RTSP, которые передают в блок 15 коммуникаций;
- формируют сигналы тревоги, с помощью блока 10 формирования тревог, на основе метаданных распознанных объектов и заданных тревожных линий и зон, и передают сигналы тревоги в блок 15 коммуникаций;
- формируют сигналы управления фокусным расстоянием объектива с помощью трансфокатора 11;
- осуществляют, с помощью блока 16 поддержки протокола ONVIF, взаимодействие с внешними объектами 17 по протоколу ONVIF;
- осуществляют управление телекамерой, с помощью WEB-интерфейса 14;
- осуществляют взаимодействие телекамеры с внешними объектами, с помощью блока 15 коммуникаций.
В предпочтительном варианте осуществления способа формируют сигналы тревоги, выбранные из набора сигналов тревог, содержащего тревоги типа объект пересек линию, объект появился в зоне, объект пропал в зоне, объект зашел в зону, объект вышел из зоны, объект слишком долго находится в зоне.
В предпочтительном варианте осуществления способа формируют, с помощью блока 6 формирования маршрута, случайную последовательность сигналов управления движением наклонно-поворотной платформой по заданным положениям.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
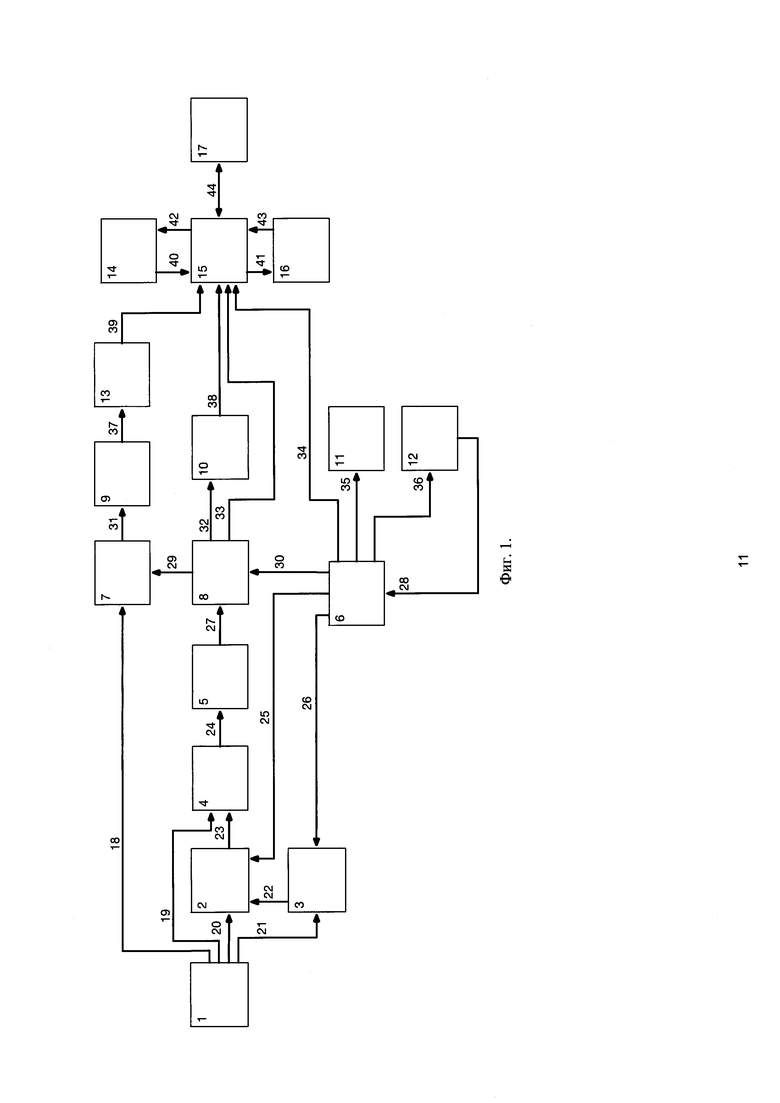
Фиг. 1. Общая функциональная схема способа видеосъемки телекамерой, установленной на наклонно-поворотной платформе, выполненная согласно изобретению.
Элементы:
1 - видеосенсор;
2 - блок вычитания фона;
3 - блок накопления фона;
4 - блок наложения маски;
5 - блок распознавания объектов;
6 - блок формирования маршрута;
7 - блок наложения служебной видеоинформации;
8 - блок принятия решения и формирования метаданных;
9 - видеокодек;
10 - блок формирования тревог;
11 - трансфокатор;
12 - наклонно-поворотная платформа;
13 - блок формирования видеопотоков;
14 - WEB-интерфейс;
15 - блок коммуникаций;
16 - блок поддержки протокола ONVIF (Open Network Video Interface Forum - форум открытого сетевого видеоинтерфейса);
17 - внешние объекты;
18-21 - основной видеопоток;
22 - видеокадры и соответствующие им положения наклонно-поворотной платформы;
23 - разностная маска;
24 - видеокадр;
25 - сигналы включения или выключения блока вычитания фона;
26 - сигналы сохранения видеокадров в блоке 3 накопления фона;
27 - данные распознанных объектов;
28 - сигналы обратной связи;
29 - потоки метаданных;
30 - координаты текущего положения наклонно-поворотной платформы;
31 - метаданные с наложенными рамками и служебной визуальной информацией об объекте;
32 - потоки метаданных;
33 - потоки метаданных;
34 - координаты текущего положения наклонно-поворотной платформы
35 - сигналы управления трансфокатором;
36 - сигналы управления наклонно-поворотной платформой;
37 - видеопотоки с различными разрешениями;
38 - сигналы тревог;
39 - видеопотоки по протоколу RTPS (Real Time Streaming Protocol - протокол обработки данных в реальном масштабе времени);
40 - сигналы управления телекамерой через WEB-интерфейс;
41 - данные по протоколу ONVIF;
42 - сигналы управления телекамерой через WEB-интерфейс;
43 - данные по протоколу ONVIF;
44 - данные взаимодействия телекамеры с внешними объектами.
Рассмотрим функционирование заявленного способа видеосъемки телекамерой, установленной на наклонно-поворотной платформе (фиг. 1).
Задают, в блоке 6 формирования маршрута, маршрут перемещения телекамеры в виде набора положений наклонно-поворотной платформы и трансфокатора.
С помощью блока 6 формирования маршрута управляют движением телекамеры по заданным положениям и формируют случайную последовательность сигналов управления, для предотвращения выявления закономерностей перемещения телекамеры по маршруту потенциальным злоумышленником. С помощью блока 6 формирования маршрута формируют сигналы 35 управления трансфокатором 11, и сигналы 36 управления наклонно-поворотной платформой 12, и на основе сигналов 28 обратной связи формирует сигналы 25 включения или выключения блока 2 вычитания фона, координаты 30 текущего положения наклонно-поворотной платформы 12, а также сигналы 26 сохранения видеокадров в блоке 3 накопления фона в соответствии с текущим положением наклонно-поворотной платформы 12.
С помощью видеосенсора 1 формируют основной видеопоток 18, 19, 20, 21, который передают в блок 3 накопления фона, блок 2 вычитания фона, блок 4 наложения маски и блок 7 наложения служебной видеоинформации.
Сохраняют в блоке 3 накопления фона, видеокадры и соответствующие им положения наклонно-поворотной платформы по сигналам 26 захвата видеокадра, поступающим от блока 6 формирования маршрута и передают их 22 в блок 2 вычитания фона.
С помощью блока 2 вычитания фона формируют разностную маску текущего, полученного 20 от видеосенсора 1 и предшествующего, полученного 22 от блока 3 накопления фона, видеокадров в соответствии с данными о текущем положении наклонно-поворотной платформы, поступающими 26 от блока 6 формирования маршрута, и передают 23 полученную разностную маску в блок 4 наложения маски.
С помощью блока 4 наложения маски формируют видеокадр для блока 5 распознавания объектов. В областях с выявленным движением накладываем маску таким образом, чтобы данная область была выделена, как зона, где потенциально может находиться целевой объект, остальную часть кадра выделяем как зону, предположительно не содержащую целевых объектов. Полученный таким образом видеокадр передают 24 в блок 5 распознавания объектов.
С помощью блока 5 распознавания объектов распознают объекты на видеокадрах, используя различные алгоритмы. Данные распознанных объектов и их параметры передают 27 в блок 8 принятия решения/формирования метаданных.
С помощью блока 8 принятия решения и формирования метаданных на основе полученных 27 от блока 5 данных распознанных объектов и их параметров, принимают решение о выделении или игнорировании объекта. В случае принятия решения о выделении объекта, на основании относительных координат текущего положения наклонно-поворотной платформы, полученных 30 от блока 6 формирования маршрута, формируют потоки метаданных распознанных объектов. Сформированные таким образом потоки метаданных 29, 32, 33 передают в блок 10 формирования тревог, блок 7 наложения служебной видеоинформации и блок 15 коммуникаций.
С помощью блока 7 наложения служебной видеоинформации на основе полученных 29 метаданных, накладывают на распознанные объекты рамки и служебную визуальную информацию об объекте и передают метаданные 31 с наложенными рамками и служебной визуальной информацией об объекте в видеокодек 9.
С помощью видеокодека 9 формируют один или несколько видеопотоков 37 с различными разрешениями, в соответствии с заданным режимом работы. Полученные таким образом, сжатые видеопотоки 37 передают на вход блока 13 формирования видеопотоков.
С помощью блока 13 формирования видеопотоков подготавливают сжатые видеопотоки к трансляции потребителю по протоколу RTSP. Видеопотоков может быть несколько, с различными разрешениями. Сформированные видеопотоки 39 по протоколу RTPS передают в блок 15 коммуникаций.
С помощью блока 10 формирования тревог, на основе поступающих в него метаданных 32 распознанных объектов и заданных тревожных линий и зон, формируют следующие виды сигналов тревоги: типа объект пересек линию, объект появился в зоне, объект пропал в зоне, объект зашел в зону, объект вышел из зоны, объект слишком долго находится в зоне. Сформированные сигналы 38 тревог передают в блок 15 коммуникаций.
С помощью трансфокатора 11 формируют сигналы управления фокусным расстоянием объектива. Таким образом можно или более детально рассматривать сцену при увеличении фокусного расстояния объектива или захватывать более общий план при уменьшении фокусного расстояния.
С помощью блока 16 поддержки протокола ONVIF осуществляют взаимодействие 41, 44 через блок 15 коммуникаций с внешними объектами 17 по протоколу ONVIF передачи данных.
С помощью WEB-интерфейса 14 осуществляют управления 40, 42 телекамерой.
С помощью блока 15 коммуникаций осуществляют взаимодействие 44 телекамеры с внешними объектами.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации заявленного изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла заявленного изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕКАМЕРА И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ ПАНОРАМНОГО ВИДЕОИЗОБРАЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА НЕМ | 2018 |
|
RU2686154C1 |
| СИСТЕМА И СПОСОБ ДЕТЕКТИРОВАНИЯ БЕСПИЛОТНЫХ ЛЕТАЛЬНЫХ АППАРАТОВ (БПЛА) | 2020 |
|
RU2746394C1 |
| СИСТЕМА ДЛЯ ЗАПИСИ И ПРОВЕДЕНИЯ МУЛЬТИМЕДИЙНЫХ ПРЕЗЕНТАЦИЙ | 2019 |
|
RU2719478C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| СИСТЕМА УДАЛЕННОГО КОНТРОЛЯ И ИНФОРМИРОВАНИЯ МАШИНИСТА О ЗАНЯТОСТИ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2017 |
|
RU2667035C1 |
| СПОСОБ ИМПЛАНТАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2108005C1 |
| СИСТЕМЫ И СПОСОБЫ НАБЛЮДЕНИЯ В НОЧНОЕ ВРЕМЯ | 2006 |
|
RU2452033C2 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА АНАЛИЗА ВНЕШНЕЙ ОБСТАНОВКИ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ | 2019 |
|
RU2735559C1 |
| Система фото-, видеофиксации нарушений правил дорожного движения и способ её работы | 2018 |
|
RU2711825C2 |
| СПОСОБ ОБМЕНА ДАННЫМИ МЕЖДУ IP ВИДЕОКАМЕРОЙ И СЕРВЕРОМ (ВАРИАНТЫ) | 2016 |
|
RU2632473C1 |
Изобретение относится к области видеонаблюдения и распознавания объектов. Техническим результатом является создание способа видеосъемки телекамерой, установленной на наклонно-поворотной платформе, за счет использования встроенного в телекамеру вычислителя, который управляет движением наклонно-поворотной платформы по заданному маршруту, при этом формирует единое панорамное видеоизображение, а также выявляет и распознает объекты на каждом кадре видеоизображения. 2 з.п. ф-лы, 1 ил.
1. Способ видеосъемки телекамерой, установленной на наклонно-поворотной платформе, в котором
- задают в блоке 6 формирования маршрута набор положений наклонно-поворотной платформы 12;
- формируют с помощью блока 6 формирования маршрута сигналы управления трансфокатором 11, последовательность сигналов управления движением наклонно-поворотной платформой 12 по заданным положениям, сигналы включения или выключения блока 2 вычитания фона, координаты 30 текущего положения наклонно-поворотной платформы 12, а также сигналы сохранения видеокадров в блоке 3 накопления фона в соответствии с текущим положением наклонно-поворотной платформы 12;
- формируют с помощью видеосенсора 1 основной видеопоток и передают его блок 3 накопления фона, блок 2 вычитания фона, блок 4 наложения маски, блок 7 наложения служебной видеоинформации;
- сохраняют с помощью блока 3 накопления фона видеокадры и соответствующие им положения наклонно-поворотной платформы 12 по сигналам захвата кадра, поступающим от блока 6 формирования маршрута, и передают их в блок 2 вычитания фона;
- формируют с помощью блока 2 вычитания фона разностную маску текущего видеокадра, полученного от видеосенсора 1, и предшествующего видеокадра, полученного от блока 3 накопления фона, в соответствии с данными о текущем положении наклонно-поворотной платформы 12, полученными от блока 6 формирования маршрута, и передают разностную маску в блок 4 наложения маски;
- формируют с помощью блока 4 наложения маски видеокадр с наложенной разностной маской, в областях с выявленным движением накладывают маску таким образом, чтобы данная область была выделена как зона, где потенциально может находиться целевой объект, остальную часть кадра выделяют как зону, предположительно, не содержащую целевых объектов, и передают полученный видеокадр в блок 5 распознавания объектов;
- распознают с помощью блока 5 распознавания объектов объекты на видеокадрах и передают данные распознанных объектов и их параметры в блок 8 принятия решения/формирования метаданных;
- принимают решение о выделении или игнорировании объекта с помощью блока 8 принятия решения и формирования метаданных на основе данных распознанных объектов и их параметров, полученных от блока 5 распознавания оценок соответствия объекта, при этом в случае принятия решения о выделении объекта формируют потоки метаданных распознанных объектов на основе координат текущего положения наклонно-поворотной платформы 12, полученных от блока 6 формирования маршрута, и передают сформированные потоки метаданных распознанных объектов в блок 10 формирования тревог, блок 7 наложения служебной видеоинформации и блок 15 коммуникаций;
- накладывают на распознанные объекты рамки и служебную визуальную информацию об объекте с помощью блока 7 наложения служебной видеоинформации на основе потоков метаданных распознанных объектов и передают метаданные с наложенными рамками и служебной визуальной информацией об объекте в видеокодек 9;
- формируют заданное количество сжатых с заданным разрешением видеопотоков с помощью видеокодека 9 в соответствии с заданным режимом работы телекамеры и передают сжатые видеопотоки в блок 13 формирования видеопотоков;
- формируют с помощью блока 13 формирования видеопотоков сжатые видеопотоки для трансляции потребителю в виде потоков протокола RTSP, которые передают в блок 15 коммуникаций;
- формируют сигналы тревоги с помощью блока 10 формирования тревог на основе метаданных распознанных объектов и заданных тревожных линий и зон и передают сигналы тревоги в блок 15 коммуникаций;
- формируют сигналы управления фокусным расстоянием объектива с помощью трансфокатора 11;
- осуществляют с помощью блока 16 поддержки протокола ONVIF взаимодействие с внешними объектами 17 по протоколу ONVIF;
- осуществляют управление телекамерой с помощью WEB-интерфейса 14;
- осуществляют взаимодействие телекамеры с внешними объектами с помощью блока 15 коммуникаций.
2. Способ по п. 1, отличающийся тем, что формируют сигналы тревоги, выбранные из набора сигналов тревог, содержащего тревоги типа объект пересек линию, объект появился в зоне, объект пропал в зоне, объект зашел в зону, объект вышел из зоны, объект слишком долго находится в зоне.
3. Способ по п. 1, отличающийся тем, что формируют с помощью блока 6 формирования маршрута случайную последовательность сигналов управления движением наклонно-поворотной платформой по заданным положениям.
| УСТРОЙСТВО СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ, СИСТЕМА СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ И СПОСОБ СОДЕЙСТВИЯ ОТСЛЕЖИВАНИЮ | 2014 |
|
RU2565243C1 |
| US 2011050947 A1, 2011-03-03 | |||
| US 2014050455 A1, 2014-02-20 | |||
| ПРОИЗВОДНЫЕ 5-АЛКЕНИЛ-2-ОКСО-ТЕТРАГИДРОФУРАНА В КАЧЕСТВЕ ВКУСОАРОМАТИЧЕСКИХ СОЕДИНЕНИЙ | 2011 |
|
RU2550509C2 |
| СПОСОБ ОБМЕНА ДАННЫМИ МЕЖДУ IP ВИДЕОКАМЕРОЙ И СЕРВЕРОМ (ВАРИАНТЫ) | 2016 |
|
RU2632473C1 |
| Хамухин А.В | |||
| Высокоэффективные алгоритмы семантической обработки видеоизображений и управления приборными комплексами технического зрения, Диссертация, 05.13.01 - Системный анализ, управление и обработка информации (информационно-вычислительное обеспечение), Том 1, Москва, 2016. | |||

