Изобретение относятся к области видеонаблюдения, обработки изображений и к автоматизированным системам поддержки принятия решений, а именно к системам и способам детектирования беспилотных летальных аппаратов (БПЛА) и может применяться в системах защиты зон, запрещенных для полетов легких беспилотных летательных аппаратов путем обнаружения БПЛА и предотвращения несанкционированных полетов БПЛА в указанных зонах.
Детекторы беспилотных летательных аппаратов (БПЛА) применяют для обеспечения безопасности на территориях, где запуск подобных устройств может приводить к рискам серьёзных инцидентов. Например, детекторы БПЛА активно применяют на территориях аэропортов и их окрестностей. Для детектирования крупных БПЛА, которые, как правило, являются образцами военной техники, чаще всего используют радиолокационные методы, применяющиеся также для слежения за обычными летательными аппаратами. Однако эти методы не всегда надёжно отслеживают появление малоразмерных БПЛА, передвигающихся с относительно невысокой скоростью на небольшой высоте. Для повышения степени защиты объектов от потенциальных угроз, которые несут в себе малоразмерные БПЛА, в последнее время часто используют системы визуального автоматического контроля воздушного пространства.
Известен описанный в патенте CN108168706 способ детектирования малоразмерных БПЛА, в котором применяют два устройства: тепловизионную телекамеру на поворотной платформе в качестве устройства для первичного обнаружения БПЛА и телекамеру, формирующую изображения видимого спектра, которую в автоматическом режиме наводят для формирования специального мультиспектрального изображения, содержащего обнаруженный БПЛА, путём совмещения тепловизионного изображения и изображения в видимом спектре.
Недостатки данного способа заключаются в следующем. Во-первых, в нём не применяют автоматические методы анализа изображения для детектирования БПЛА, вследствие чего ухудшается точность и быстродействие детектирования БПЛА. Во-вторых, угол зрения подавляющего числа всех моделей тепловизионных устройств находится в пределах от 30 до 60 градусов, вследствие чего уменьшается зона детектирования БПЛА. Такие углы, с одной стороны, не достаточно велики, чтобы с помощью одного устройства обеспечивать непрерывный контроль в круговом секторе (360 градусов), а с другой стороны, наоборот, не достаточно малы, чтобы обеспечивать достаточное разрешение изображений малоразмерных аппаратов на дальностях свыше 200 метров от тепловизионной телекамеры.
В патенте CN107392173 раскрыт способ детектирования малоразмерных БПЛА на изображении тепловизора на основе автоматического анализа потока изображений, состоящего из двух этапов: выделение подвижных элементов сцены, за счёт построения модели фона, сопоставления с ней текущего кадра, и применение нейросетевого решающего правила для уточнённой классификации подвижных объектов и выделения среди них именно БПЛА.
Наиболее близким к заявленному изобретению является описанный в патенте RU2651147 способ детектирования малоразмерных БПЛА, принцип действия которого аналогичен способу предыдущего аналога по патенту CN107392173 с той разницей, что в качестве входа нейронной сети в данном способе используют не один кадр изображения БПЛА, а последовательность вырезанных областей кадров фиксированной длинны, приведённых масштабированием к одному размеру. Данный способ выбран в качестве прототипа заявленного изобретения.
Недостатки способов аналога по патенту CN107392173 и прототипа заключаются в том, что они имеют недостаточную функциональность, вследствие отсутствия способности обрабатывать изображения БПЛА, формируемые подвижными телекамерами, поскольку осуществляют выделение подвижных объектов с помощью модели построения фонового изображения сцены на первом этапе. Эта модель достаточно хорошо работает на стационарных телекамерах, но для обеспечения контроля за круговым сектором на расстояниях свыше 500 метров необходимо установить большое количество телекамер с дорогостоящими трансфокаторами (объективами с переменным фокусным расстоянием), что приведет к существенному удорожанию способа детектирования. Например, для формирования изображения, которое содержало бы в себе по крайней мере 10 точек, для БПЛА модели DJI с линейными размерами 40см на расстоянии 1000 метров от камеры потребуется трансфокатор, способный обеспечивать угол зрения примерно 10 градусов. Для закрытия сектора 360 градусов потребуется 36 таких телекамер.
Техническим результатом изобретения является создание системы и способа детектирования беспилотных летальных аппаратов (БПЛА) с увеличенными функциональными возможностями, а именно с возможностью использования движущейся (поворотной) телекамеры, с увеличенной точностью детектирования, за счет использования блока нейросетевого анализа с рекурсивными связями, что позволяет точнее классифицировать последовательности изображений и точнее автоматически вычленять периодические изменения видимой формы объектов, которые возникают, например, при формировании изображений птиц, а также с увеличенным быстродействием детектирования, за счет применения блока обратной связи, влияющего на подготовку данных для нейросетевой обработки путём исключения из нейросетевой обработки тех траекторий перемещения БПЛА, решение по которым уже принято.
Поставленный технический результат достигнут путем создания системы детектирования беспилотных летальных аппаратов (БПЛА), содержащей телекамеру 1 и вычислительное устройство 2, которое включает в себя блок 3 выделения текстурных особенностей, вход которого соединен с выходом телекамеры 1, а выход с входом блока 4 выделения траекторий, выход которого соединен с первым входом блока 5 формирования последовательностей фрагментов изображений, выход которого соединен с входом блока 6 нейросетевого анализа, первый выход которого соединен с входом блока 8 вывода результатов, второй выход соединен со входом, образуя рекурсивную связь, а третий выход соединен с входом блока 7 обратной связи, выход которого соединен с вторым входом блока 5 формирования последовательностей фрагментов изображений, при этом телекамера 1 выполнена с возможностью формирования видеоизображения и передачи его в вычислительное устройство 2, выполненное с возможностью обработки кадров видеоизображения (видеопотока), при этом
- блок 3 выделения текстурных особенностей выполнен с возможностью выделения на кадрах изображения текстурных особенности и передачи их в
- блок 4 выделения траекторий, выполненный с возможностью определения на кадрах изображения перемещающихся текстурных особенностей, выделения траекторий перемещения текстурных особенностей и передачи их в
- блок 5 формирования последовательностей фрагментов изображений, выполненный с возможностью выделения на кадрах областей изображений на траекториях текстурных особенностей в виде фрагментов и передачи их в
- блок 6 нейросетевого анализа, выполненный с возможностью первичного анализа фрагментов изображения, с применением нейронных сетей и рекурсивных связей, при этом классифицирования их по категориям объектов, в том числе по категории БПЛА, и передачи фрагментов изображения и категории БПЛА в блок 8 вывода результатов и в
- блок 7 обратной связи, выполненный с возможностью формирования и передачи в блок 5 формирования последовательностей фрагментов изображений данных о фрагментах изображения, проанализированных блоком 6 нейросетевого анализа, при этом исключают их повторную нейросетевую обработку;
- блок 8 вывода результатов выполнен с возможностью окончательного анализа фрагментов изображения категории БПЛА, при этом формирования сигнала о присутствии или отсутствии БПЛА на изображении.
В предпочтительном варианте осуществления системы телекамера 1 выполнена с возможностью формирования видеоизображения видимого или инфракрасного спектра.
В предпочтительном варианте осуществления системы блок 6 нейросетевого анализа выполнен с возможностью классифицирования объектов по категориям БПЛА, облака, птицы, самолеты.
В предпочтительном варианте осуществления системы блок 3 выделения текстурных особенностей выполнен с возможностью выделения на кадрах изображения текстурных особенностей за счёт поиска явно выделяющихся главных направлений в матрице вторых моментов локальных областей изображения, подвергнутого обработке с помощью оператора поиска границ.
В предпочтительном варианте осуществления системы блок 4 выделения траекторий выполнен с возможностью определения на кадрах изображения перемещающихся текстурных особенностей и выделения траекторий перемещения текстурных особенностей, при этом производится решение задачи о назначениях в двудольном графе, вершины которого соответствуют выделенным на текущем кадре траекториям и выделенным на новом кадре текстурным особенностям, а ребрам между вершинами-траекториями и вершинами-особенностями назначают веса, определяющие степень достоверности гипотезы о переходе на новом кадре соответствующей ребру траектории в положение соответствующей ребру текстурной особенности.
В предпочтительном варианте осуществления системы блок 4 выделения траекторий выполнен с возможностью определения на кадрах изображения перемещающихся текстурных особенностей и выделения траекторий перемещения текстурных особенностей, при этом производится решение задачи о максимальном потоке в графе, вершинами которого являются выделенные текстурные особенности, ребра которого соединяют точки текстурной особенности на соседних кадрах видеопотока, и сопоставляют их с весами, определяющими сходство текстур, соответствующих ребрам.
В предпочтительном варианте осуществления системы радар верхней полусферы выполнен с возможностью первичного выделения беспилотного летательного аппарата (БПЛА), а телекамера 1 установлена на предварительно откалиброванной поворотной платформе с возможностью наведения в автоматическом режиме на выделенный радаром БПЛА, после чего запускается вычислительное устройство 2, выполненное с возможностью активации для повторного выделения БПЛА в видеопотоке и для дополнительной фильтрации ложных срабатываний.
Поставленный технический результат также достигнут путем создания способа детектирования беспилотных летальных аппаратов (БПЛА), в котором
- с помощью телекамеры 1 формируют видеоизображение и передают его в вычислительное устройство 2, с помощью которого обрабатывают кадры видеоизображения (видеопотока), при этом
- с помощью блока 3 выделения текстурных особенностей, на кадрах изображения выделяют текстурные особенности, которые передают в
- блок 4 выделения траекторий, с помощью которого на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, которые передают в
- блок 5 формирования последовательностей фрагментов изображений, с помощью которого на кадрах изображения, на траекториях выделяют текстурные особенности в виде фрагментов изображения, которые передают в
- блок 6 нейросетевого анализа, с помощью которого, с применением нейронных сетей и рекурсивных связей, первично анализируют фрагменты изображения, при этом классифицируют их по категориям объектов, в том числе по категории БПЛА, и передают фрагменты изображения категории БПЛА в блок 8 вывода результатов и в
- блок 7 обратной связи, с помощью которого формируют и передают в блок 5 формирования последовательностей фрагментов изображений данные о фрагментах изображения, проанализированных блоком 6 нейросетевого анализа, при этом исключают их повторную нейросетевую обработку;
- с помощью блока 8 вывода результатов окончательно анализируют фрагменты изображения категории БПЛА, при этом формируют сигнал о присутствии или отсутствии БПЛА на изображении.
В предпочтительном варианте осуществления способа с помощью телекамеры 1 видимого или инфракрасного спектра формируют изображение.
В предпочтительном варианте осуществления способа с помощью блока 6 нейросетевого анализа классифицируют объекты по категориям БПЛА, облака, птицы, самолеты.
В предпочтительном варианте осуществления способа с помощью блока 3 выделения текстурных особенностей, на кадрах изображения выделяют текстурные особенности, при этом выполняют поиск явно выделяющихся главных направлений в матрице вторых моментов локальных областей изображения, подвергнутого обработке с помощью оператора поиска границ.
В предпочтительном варианте осуществления способа с помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о назначениях в двудольном графе, вершины которого соответствуют выделенным на текущем кадре траекториям и выделенным на новом кадре текстурным особенностям, а ребрам между вершинами-траекториями и вершинами-особенностями назначают веса, определяющие степень достоверности гипотезы о переходе на новом кадре соответствующей ребру траектории в положение соответствующей ребру текстурной особенности.
В предпочтительном варианте осуществления способа с помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о максимальном потоке в графе, вершинами которого являются выделенные текстурные особенности, ребра которого соединяют точки текстурной особенности на соседних кадрах видеопотока и сопоставляются с весами, определяющими сходство текстур, соответствующих ребрам.
В предпочтительном варианте осуществления способа первичное выделение беспилотного летательного аппарата (БПЛА) осуществляют с помощью радара верхней полусферы, а телекамера 1 установлена на поворотной платформе, которую в автоматическом режиме после предварительной калибровки наводят на выделенный радаром БПЛА, после чего активируют вычислительное устройство 2, с помощью которого повторно выделяют БПЛА в видеопотоке для дополнительной фильтрации ложных срабатываний.
Для лучшего понимания заявленного изобретения далее приводится его подробное описание с соответствующими графическими материалами.
Фиг. 1. Схема вычислительного устройства системы детектирования беспилотных летальных аппаратов (БПЛА), выполненная согласно изобретению.
Элементы:
1 – телекамера;
2 – вычислительное устройство;
3 – блок выделения текстурных особенностей;
4 – блок выделения траекторий;
5 – блок формирования последовательностей фрагментов изображений;
6 – блок нейросетевого анализа;
7 – блок обратной связи;
8 – блок вывода результатов.
Фиг. 2. Пример изображения БПЛА, сформированного телекамерой инфракрасного спектра.
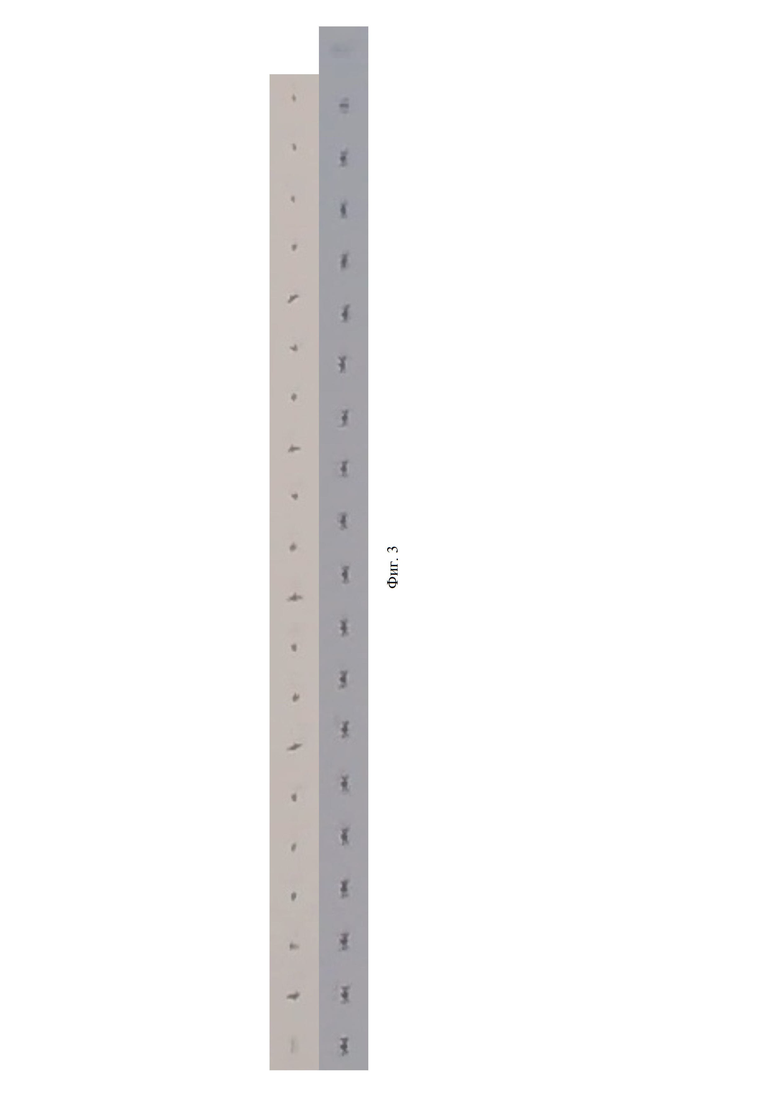
Фиг. 3. Пример последовательности изображений птиц (сверху) и БПЛА (снизу), сформированных телекамерой.
Рассмотрим вариант выполнения заявленных системы и способа детектирования беспилотных летальных аппаратов (Фиг. 1). Система состоит из телекамеры 1 инфракрасного спектра, которая формирует изображение, и вычислительного устройства 2, которое выполняет цифровую обработку поступающих кадров изображения. На инфракрасном изображении БПЛА контрастно выделяется по отношению к другим элементам сцены, поскольку за счет повышенной температуры двигательной установки температура БПЛА значительно выше температуры окружающей среды (Фиг. 2). Вычислительное устройство 2 включает в себя блок 3 выделения текстурных особенностей. Вход блока 3 выделения текстурных особенностей соединен с выходом телекамеры 1, а выход с входом блока 4 выделения траекторий. Выход блока 4 выделения траекторий соединен с первым входом блока 5 формирования последовательностей фрагментов изображений. Выход блока 5 формирования последовательностей фрагментов изображений соединен с входом блока 6 нейросетевого анализа. Первый выход блока 6 нейросетевого анализа соединен с входом блока 8 вывода результатов, второй выход соединен со входом, образуя рекурсивную связь, а третий выход соединен с входом блока 7 обратной связи. Выход блока 7 обратной связи соединен с вторым входом блока 5 формирования последовательностей фрагментов изображений.
Представленный на Фиг. 1 вариант выполнения заявленной системы детектирования беспилотных летальных аппаратов функционирует следующим образом.
С помощью телекамеры 1 формируют видеоизображение и передают его в вычислительное устройство 2. С помощью вычислительного устройства 2 обрабатывают кадры видеоизображения (видеопотока), при этом выполняют следующие операции.
С помощью блока 3 выделения текстурных особенностей, на кадрах изображения выделяют текстурные особенности, при этом выполняют поиск явно выделяющихся главных направлений в матрице вторых моментов локальных областей изображения, подвергнутого обработке с помощью оператора поиска границ. Текстурные особенности передают в блок 4 выделения траекторий.
С помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, которые передают в блок 5 формирования последовательностей фрагментов изображений.
С помощью блока 5 формирования последовательностей фрагментов изображений на кадрах изображения, на траекториях текстурных особенностей выделяют подобласти в виде фрагментов изображения, которые передают в блок 6 нейросетевого анализа.
С помощью блока 6 нейросетевого анализа, с применением нейронных сетей и рекурсивных связей, первично анализируют фрагменты изображения, при этом классифицируют их по категориям объектов БПЛА, облака, птицы, самолеты, и передают фрагменты изображения категории БПЛА в блок 8 вывода результатов и в блок 7 обратной связи.
С помощью блока 7 обратной связи формируют и передают в блок 5 формирования последовательностей фрагментов изображений данные о фрагментах изображения, проанализированных блоком 6 нейросетевого анализа, при этом исключают их повторную нейросетевую обработку.
С помощью блока 8 вывода результатов окончательно анализируют фрагменты изображения категории БПЛА, при этом формируют сигнал о присутствии или отсутствии БПЛА на изображении.
С помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о назначениях в двудольном графе, вершины которого соответствуют выделенным на текущем кадре траекториям и выделенным на новом кадре текстурным особенностям, а ребрам между вершинами-траекториями и вершинами-особенностями назначают веса, определяющие степень достоверности гипотезы о переходе на новом кадре соответствующей ребру траектории в положение соответствующей ребру текстурной особенности.
С помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о максимальном потоке в графе, вершинами которого являются выделенные текстурные особенности, ребра которого соединяют точки текстурной особенности на соседних кадрах видеопотока, и сопоставляют с весами, определяющими сходство текстур, соответствующих ребрам.
Первичное выделение беспилотного летательного аппарата (БПЛА) осуществляют с помощью радара верхней полусферы, а телекамера 1 установлена на поворотной платформе, которую в автоматическом режиме после предварительной калибровки наводят на выделенный радаром БПЛА, после чего активируют вычислительное устройство 2, с помощью которого повторно выделяют БПЛА в видеопотоке для дополнительной фильтрации ложных срабатываний.
Заявленное изобретение обладает следующими преимуществами. Блок 7 обратной связи влияет на подготовку данных для нейросетевой обработки путём исключения из нейросетевой обработки тех траекторий, решение по которым уже принято, что существенно увеличивает быстродействие приведённого заявленного изобретения. Блок 6 нейросетевого анализа имеет рекурсивные связи, что позволяет точнее классифицировать последовательности изображений, примеры которых приведены на Фиг. 3. Рекурсивность позволяет более точно автоматически вычленять периодические изменения видимой формы объектов, которые возникают, например, при формировании изображений птиц (Фиг. 3). Поскольку разрешение изображений на дальней дистанции наблюдения, как правило, не велико, подобные периодические изменения формы являются существенным признаком, способствующим точной классификации. При этом, было бы крайне сложно отнести примеры, представленные на Фиг. 3, к разным категориям, анализируя только лишь одиночный кадр представленных последовательностей. Телекамера 1 инфракрасного спектра (тепловизор) может быть установлена на поворотной платформе, которая автоматически наводится по указанию другой системы детектирования БПЛА, например, радарной системы.
Хотя описанный выше вариант выполнения изобретения был изложен с целью иллюстрации заявленного изобретения, специалистам ясно, что возможны разные модификации, добавления и замены, не выходящие из объема и смысла заявленного изобретения, раскрытого в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСПРЕСС-СПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАНИЯ ПЛАМЕНИ С БОРТА БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2017 |
|
RU2669310C1 |
| Способ автоматического определения ориентации надводных судов с использованием оптико-электронной системы беспилотного летательного аппарата | 2023 |
|
RU2830991C1 |
| ТЕЛЕКАМЕРА И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ ПАНОРАМНОГО ВИДЕОИЗОБРАЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА НЕМ | 2018 |
|
RU2686154C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ АЭРОСЪЕМКИ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ЗОН И УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЦЕЛЕВЫХ НАГРУЗОК БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2840814C1 |
| Бортовая интеллектуальная система поиска и наведения беспилотного летательного аппарата | 2023 |
|
RU2819590C1 |
| СПОСОБ БЕЗАВАРИЙНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2727044C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2021 |
|
RU2757802C1 |
| Способ обработки данных и система технического зрения для роботизированного устройства | 2021 |
|
RU2782662C1 |
| СПОСОБ ВИДЕОСЪЕМКИ ТЕЛЕКАМЕРОЙ, УСТАНОВЛЕННОЙ НА НАКЛОННО-ПОВОРОТНОЙ ПЛАТФОРМЕ | 2018 |
|
RU2682315C1 |


Изобретение относится к области видеонаблюдения, обработки изображений и к автоматизированным системам поддержки принятия решений. Техническим результатом изобретения является создание системы и способа детектирования беспилотных летальных аппаратов (БПЛА) с увеличенными функциональными возможностями, а именно с возможностью использования движущейся (поворотной) телекамеры, с увеличенной точностью детектирования. Технический результат достигается за счет использования блока нейросетевого анализа с рекурсивными связями, что позволяет точнее классифицировать последовательности изображений и точнее автоматически вычленять периодические изменения видимой формы объектов, которые возникают, например, при формировании изображений птиц, а также с увеличенным быстродействием детектирования, за счет применения блока обратной связи, влияющего на подготовку данных для нейросетевой обработки путём исключения из нейросетевой обработки тех траекторий перемещения БПЛА, решение по которым уже принято. 2 н. и 12 з.п. ф-лы, 3 ил.
1. Система детектирования беспилотных летальных аппаратов (БПЛА), содержащая телекамеру 1 и вычислительное устройство 2, которое включает в себя блок 3 выделения текстурных особенностей, вход которого соединен с выходом телекамеры 1, а выход - с входом блока 4 выделения траекторий, выход которого соединен с первым входом блока 5 формирования последовательностей фрагментов изображений, выход которого соединен с входом блока 6 нейросетевого анализа, первый выход которого соединен с входом блока 8 вывода результатов, второй выход соединен с входом, образуя рекурсивную связь, а третий выход соединен с входом блока 7 обратной связи, выход которого соединен с вторым входом блока 5 формирования последовательностей фрагментов изображений, при этом
телекамера 1 выполнена с возможностью формирования видеоизображения и передачи его в вычислительное устройство 2, выполненное с возможностью обработки кадров видеоизображения (видеопотока), при этом
- блок 3 выделения текстурных особенностей выполнен с возможностью выделения на кадрах изображения текстурных особенности и передачи их в
- блок 4 выделения траекторий, выполненный с возможностью определения на кадрах изображения перемещающихся текстурных особенностей, выделения траекторий перемещения текстурных особенностей и передачи их в
- блок 5 формирования последовательностей фрагментов изображений, выполненный с возможностью выделения на кадрах областей изображений на траекториях текстурных особенностей в виде фрагментов и передачи их в
- блок 6 нейросетевого анализа, выполненный с возможностью первичного анализа фрагментов изображения, с применением нейронных сетей и рекурсивных связей, при этом классифицирования их по категориям объектов, в том числе по категории БПЛА, и передачи фрагментов изображения и категории БПЛА в блок 8 вывода результатов и в
- блок 7 обратной связи, выполненный с возможностью формирования и передачи в блок 5 формирования последовательностей фрагментов изображений данных о фрагментах изображения, проанализированных блоком 6 нейросетевого анализа, при этом исключают их повторную нейросетевую обработку;
- блок 8 вывода результатов выполнен с возможностью окончательного анализа фрагментов изображения категории БПЛА, при этом формирования сигнала о присутствии или отсутствии БПЛА на изображении.
2. Система по п. 1, отличающаяся тем, что телекамера 1 выполнена с возможностью формирования видеоизображения видимого или инфракрасного спектра.
3. Система по п. 1, отличающаяся тем, что блок 6 нейросетевого анализа выполнен с возможностью классифицирования объектов по категориям БПЛА, облака, птицы, самолеты.
4. Система по п. 1, отличающаяся тем, что блок 3 выделения текстурных особенностей выполнен с возможностью выделения на кадрах изображения текстурных особенностей за счёт поиска явно выделяющихся главных направлений в матрице вторых моментов локальных областей изображения, подвергнутого обработке с помощью оператора поиска границ.
5. Система по п. 1, отличающаяся тем, что блок 4 выделения траекторий выполнен с возможностью определения на кадрах изображения перемещающихся текстурных особенностей и выделения траекторий перемещения текстурных особенностей, при этом производится решение задачи о назначениях в двудольном графе, вершины которого соответствуют выделенным на текущем кадре траекториям и выделенным на новом кадре текстурным особенностям, а ребрам между вершинами-траекториями и вершинами-особенностями назначают веса, определяющие степень достоверности гипотезы о переходе на новом кадре соответствующей ребру траектории в положение соответствующей ребру текстурной особенности.
6. Система по п. 1, отличающаяся тем, что блок 4 выделения траекторий выполнен с возможностью определения на кадрах изображения перемещающихся текстурных особенностей и выделения траекторий перемещения текстурных особенностей, при этом производится решение задачи о максимальном потоке в графе, вершинами которого являются выделенные текстурные особенности, ребра которого соединяют точки текстурной особенности на соседних кадрах видеопотока, и сопоставляют их с весами, определяющими сходство текстур, соответствующих ребрам.
7. Система по п. 1, отличающаяся тем, что радар верхней полусферы выполнен с возможностью первичного выделения беспилотного летательного аппарата (БПЛА), а телекамера 1 установлена на предварительно откалиброванной поворотной платформе с возможностью наведения в автоматическом режиме на выделенный радаром БПЛА, после чего запускается вычислительное устройство 2, выполненное с возможностью активации для повторного выделения БПЛА в видеопотоке и для дополнительной фильтрации ложных срабатываний.
8. Способ детектирования беспилотных летальных аппаратов (БПЛА), в котором
- с помощью телекамеры 1 формируют видеоизображение и передают его в вычислительное устройство 2, с помощью которого обрабатывают кадры видеоизображения (видеопотока), при этом
- с помощью блока 3 выделения текстурных особенностей, на кадрах изображения выделяют текстурные особенности, которые передают в
- блок 4 выделения траекторий, с помощью которого на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, которые передают в
- блок 5 формирования последовательностей фрагментов изображений, с помощью которого на кадрах изображения, на траекториях выделяют текстурные особенности в виде фрагментов изображения, которые передают в
- блок 6 нейросетевого анализа, с помощью которого, с применением нейронных сетей и рекурсивных связей, первично анализируют фрагменты изображения, при этом классифицируют их по категориям объектов, в том числе по категории БПЛА, и передают фрагменты изображения категории БПЛА в блок 8 вывода результатов и в
- блок 7 обратной связи, с помощью которого формируют и передают в блок 5 формирования последовательностей фрагментов изображений данные о фрагментах изображения, проанализированных блоком 6 нейросетевого анализа, при этом исключают их повторную нейросетевую обработку;
- с помощью блока 8 вывода результатов окончательно анализируют фрагменты изображения категории БПЛА, при этом формируют сигнал о присутствии или отсутствии БПЛА на изображении.
9. Способ по п. 8, отличающийся тем, что с помощью телекамеры 1 видимого или инфракрасного спектра формируют изображение.
10. Способ по п. 8, отличающийся тем, что с помощью блока 6 нейросетевого анализа классифицируют объекты по категориям БПЛА, облака, птицы, самолеты.
11. Способ по п. 8, отличающийся тем, что с помощью блока 3 выделения текстурных особенностей, на кадрах изображения выделяют текстурные особенности, при этом выполняют поиск явно выделяющихся главных направлений в матрице вторых моментов локальных областей изображения, подвергнутого обработке с помощью оператора поиска границ.
12. Способ по п. 8, отличающийся тем, что с помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о назначениях в двудольном графе, вершины которого соответствуют выделенным на текущем кадре траекториям и выделенным на новом кадре текстурным особенностям, а ребрам между вершинами-траекториями и вершинами-особенностями назначают веса, определяющие степень достоверности гипотезы о переходе на новом кадре соответствующей ребру траектории в положение соответствующей ребру текстурной особенности.
13. Способ по п. 8, отличающийся тем, что с помощью блока 4 выделения траекторий на кадрах изображения определяют перемещающиеся текстурные особенности и выделяют траектории перемещения текстурных особенностей, при этом решают задачу о максимальном потоке в графе, вершинами которого являются выделенные текстурные особенности, ребра которого соединяют точки текстурной особенности на соседних кадрах видеопотока и сопоставляются с весами, определяющими сходство текстур, соответствующих ребрам.
14. Способ по п. 8, отличающийся тем, что первичное выделение беспилотного летательного аппарата (БПЛА) осуществляют с помощью радара верхней полусферы, а телекамера 1 установлена на поворотной платформе, которую в автоматическом режиме после предварительной калибровки наводят на выделенный радаром БПЛА, после чего активируют вычислительное устройство 2, с помощью которого повторно выделяют БПЛА в видеопотоке для дополнительной фильтрации ложных срабатываний.
| CN 107392173 A, 24.11.2017 | |||
| УСТРОЙСТВО И СПОСОБ КАСКАДНОЙ ОБРАБОТКИ ПОТОКА ИЗОБРАЖЕНИЙ С ПОМОЩЬЮ СВЁРТОЧНЫХ НЕЙРОННЫХ СЕТЕЙ | 2017 |
|
RU2651147C1 |
| CN 108168706 A, 15.06.2018 | |||
| CN 108037543 A, 15.05.2018 | |||
| CN 104331085 A, 04.02.2015. | |||

