Изобретение относиться к области контроля движения дорожного транспорта и предназначено для осуществления контроля соблюдения правил дорожного движения, выявления и фото-, видеофиксации нарушений правил дорожного движения одним или группой транспортных средств.
Из уровня техники известна система контроля скорости движения транспортных средств с видеофиксацией (патент РФ №107874 от 06.04.2011, МПК G08G 1/00), содержащей радиолокатор, средство получения и регистрации изображения, блок управления и обработки данных, средство передачи данных, блок питания, источник освещения. Средство передачи данных выполнено в виде приемопередатчика радиосигналов. Блок питания содержит аккумулятор и блок управления и стабилизации напряжения. Источник освещения дополнительно снабжен блоком выключения/выключения, по меньшей мере, одной солнечной батарей, ветроэлектрогенератор, источник ИК-света с блоком управления. Средство получения и регистрации изображения содержит только фото- или видеокамеру.
Недостатками являются:
1. Система выполняется только в стационарном исполнении, что уменьшает возможность её эксплуатации.
2. Система крепиться на определенной высоте, равной 8-12 м над уровнем дороги, уменьшая ее универсальность.
3. В системе используются источник дневного освещения, солнечные батареи, ветрогенератор, что приводит к увеличению веса и габаритов системы, необходимости использования дополнительных креплений, блоков включения/выключения, блоков управления данными подсистемами.
4. В системе отсутствуют модуль определения времени и географических координат, средство передачи данных, что уменьшает доказательную базу при регистрации нарушения ПДД.
5. Отсутствуют автоматическое формирование квитанций оплаты штрафа нарушения ПДД и формирования базы данных в системе.
Также из уровня техники известно автономное устройство видеофиксации (патент РФ №157502 от 28.01.2015 МПК G08G 1/00), содержащее фоторадарный блок и аккумуляторный блок питания, размещенные на опоре, отличающиеся тем, что фоторадарный блок расположен на вандалонедоступной высоте, составляющей 5-10 м, а аккумуляторный блок размещен в герметичном корпусе, снабженном встроенномы электромеханическими замками и вандалозащизенным разъемом, имеющим встроенные электромеханические замки и вандалозащищенные разъемы, причем электромеханические замки выполнены с возможностью управления командами от фоторадарного блока. Вандплозащищенный корпус с аккумуляторным блоком закреплен у основания опоры посредством крепежного механизма, фиксирующие элементы которого расположены внутри корпуса, при этом вертикальная опора оснащена подъемным механизмом для оперативной замены аккумулятора в аккумуляторном блоке питания, а также для подъема и спуска фоторадарного блока, содержащим электро- и/или ручную лебедку, размещенную в верхней части опоры, и вертикальную направляющую, размещенную на поверхности опоры.
Недостатками автономного устройства являются:
1. Система крепиться на определенной высоте, равной 5-10м над уровнем дороги, уменьшая ее универсальность.
2. Необходимость постоянного присутствия оператора из-за отсутствия блока управления.
3. Автономность работы комплекса заключается только в автономности электропитания.
4. Перемещение платформы по направляющей выполняется с помощью привода, состоящего из электро- и/или ручной лебедки, системы тросов, блоков. Недостатком такой системы является сложность конструкции, опасность скручивания лебедки, срыва с блока, разрыва; травмоопасность, потребность в дополнительных устройствах.
5. Отсутствует модуль определения времени и географических координат, средство передачи данных, а также устройство хранения полученных фоторадарным блоком фото- видеоматериалов.
6. Отсутствует программно-техническая возможность автоматического создания квитанция для уплаты штрафов нарушения ПДД, а также создания фото- видео доказательств.
Прототипом заявленного изобретения выбран комплекс видеофиксации и измерения скорости движения и координат транспортных средств (патент РФ №2539676, МПК G08G 1/017, от 22.05.2013г.), содержащий радар, видеокамеру со светочувствительным сенсором, объектив, модуль управления, выполненный с возможностью управления видеокамерой, процессорный и осветительный блоки, содержащий несколько узконаправленных ИК-прожекторов, и обеспечивающий достоверное распознавание номерных знаков транспортных средств нарушителей. Радар выполняется с возможностью одновременного измерения скоростей и координат всех транспортных средств, находящихся в зоне контроля видеокамеры, процессорный блок выполнен с возможностью автоматического распознавания изображений номерных знаков, полученных с видеокамеры, одновременно с измерениями радара, причем зона контроля видеокамеры охватывает не менее четырех полос движения, а изображения номерного знака содержит не менее N пикселей по ширине. Работа радара основана на принципе фазовой пеленгации.
Недостатком данного комплекса является:
1. Большое количество дополнительного оборудования: узконаправленные ИК-прожекторы, широкоугольный объектив, отдельное исполнение модуля управления, процессорного блока, измерительного модуля, модуль управления и устройство хранения – уменьшает надежность системы, увеличивает сложность монтирования и обслуживания системы, увеличивает стоимость системы.
2. Отсутствие поворотной платформы уменьшает зону наблюдения видеокамеры и работы радара, увеличивает количество «слепых» зон наблюдения, ограничивает возможность использования комплекса.
3. Зона контроля камеры охватывает не менее четырех полос движения, что делает невозможным использование комплекса на дорогах с меньшим количеством полос движения.
Задачей предлагаемого изобретения является разработка способа фото-, видеофиксации нарушения правил дорожного движения (ПДД) вне зависимости от количества полос движения и времени суток и года; мониторинга транспортного потока с одновременным подсчетом транспортных средств (ТС), проехавших в единицу времени; поиска транспортных средств, находящихся в розыске и/или не имеющих полиса ОСАГО; а также автоматическую фото, видеофиксацию транспортных средств в зоне контроля в соответствии с главой 12 КоАП РФ «Административные правонарушения в области дорожного движения».
Техническим результатом заявленного изобретения является упрощенный и надежный способ регистрации нарушений правил дорожного движения, имеющий передвижное и/или стационарное исполнение, увеличивающее возможность его использования.
Указанный технический результат достигается тем, что система фотофиксации нарушений включает: фоторадарный контроллер, состоящий из когерентного радара, видеокамеры, вычислительного блока, устройства передачи данных, одного контроллера управления климатом, средства терморегулирования, GPS/ГЛОНАСС/GSM/Wi-Fi – антенн, одной панели индикации; и ИК-прожектор, а также может содержать штатив, поворотную платформу и, по меньшей мере, один блок аккумуляторных батарей.
Также технический результат достигается тем, что система обеспечивает фиксацию времени и изображения ТС при нахождении в зоне контроля, расчет координат системы, распознавание государственного регистрационного знака (ГРЗ) ТС, находящихся в зоне видимости системы, оцифровку шкалы времени по сигналам спутниковых навигационных систем, синхронизацию времени фотофиксации и передачу фотоматериалов для последующей обработки нарушений правил дорожного движения транспортными средствами (ТС).
Использование заявленной системы обеспечивает мониторинг транспортного потока с одновременным подсчетом ТС, проехавших в единицу времени, поиска транспортных средств, находящихся в розыске и/или не имеющих полиса ОСАГО, а также автоматическую фото, видеофиксацию транспортных средств в зоне контроля в соответствии с КоАП РФ:
a) Управление ТС, не зарегистрированным в установленном порядке, ТС, не прошедшим государственного технического осмотра или технического осмотра (ст. 12.1 и 12.31)
b) Управление ТС с нарушением правил установки на нём ГРЗ (ст. 12.2);
c) Нарушение правил установки на транспортном средстве устройств для подачи специальных световых или звуковых сигналов либо незаконное нанесение специальных цветографических схем автомобилей оперативных служб (ст. 12.4);
d) Нарушение правил применения ремней безопасности и мотошлемов (ст. 12.6);
e) Превышение установленной скорости движения (ст. 12.9);
f) Нарушение правил движения через железнодорожные пути (ст. 12.10);
g) Нарушение правил движения по автомагистрали (ст. 12. 11);
h) Проезд на запрещающий сигнал светофора или на запрещающий жест регулировщика (ст. 12.12);
i) Нарушение правил проезда перекрестков (ст. 12.13);
j) Нарушение правил маневрирования (ст. 12.14);
k) Нарушение правил расположения транспортного средства на проезжей части дороги, встречного разъезда или обгона (ст. 12.15);
Несоблюдение требований, предписанных дорожными знаками или разметкой проезжей части дорогиl) (ст. 12.16);
Непредоставление преимущества в движении маршрутному транспортному средству или транспортному средству с включенными специальными световыми и звуковыми сигналамиm) (ст. 12. 17);
Непредоставление преимущества в движении пешеходам или иным участникам дорожного движенияn) (ст. 12. 18);
Нарушение правил остановки или стоянки транспортных средствo) (ст. 12.19);
Нарушение правил пользования внешними световыми приборами, звуковыми сигналами, аварийной сигнализацией или знаком аварийной остановкиp) (ст. 12.20).
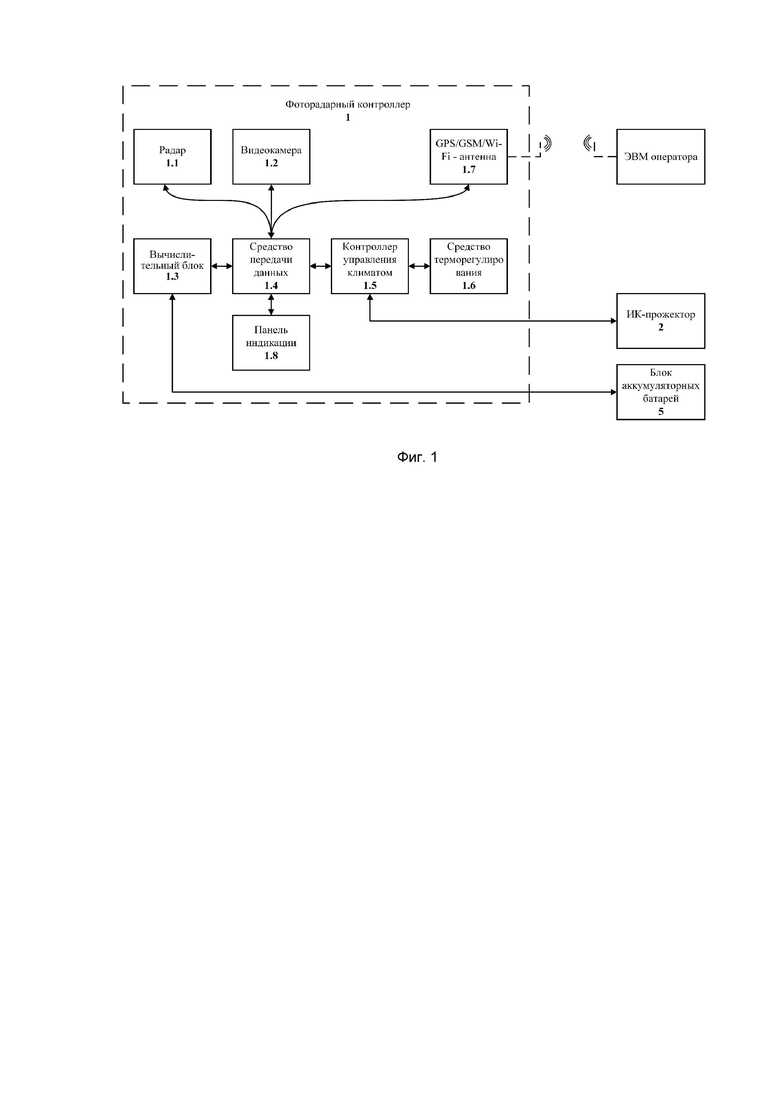
На фиг. 1 представлена структурная блок-схема взаимосвязи элементов фоторадарного контроллера и периферийных устройств.
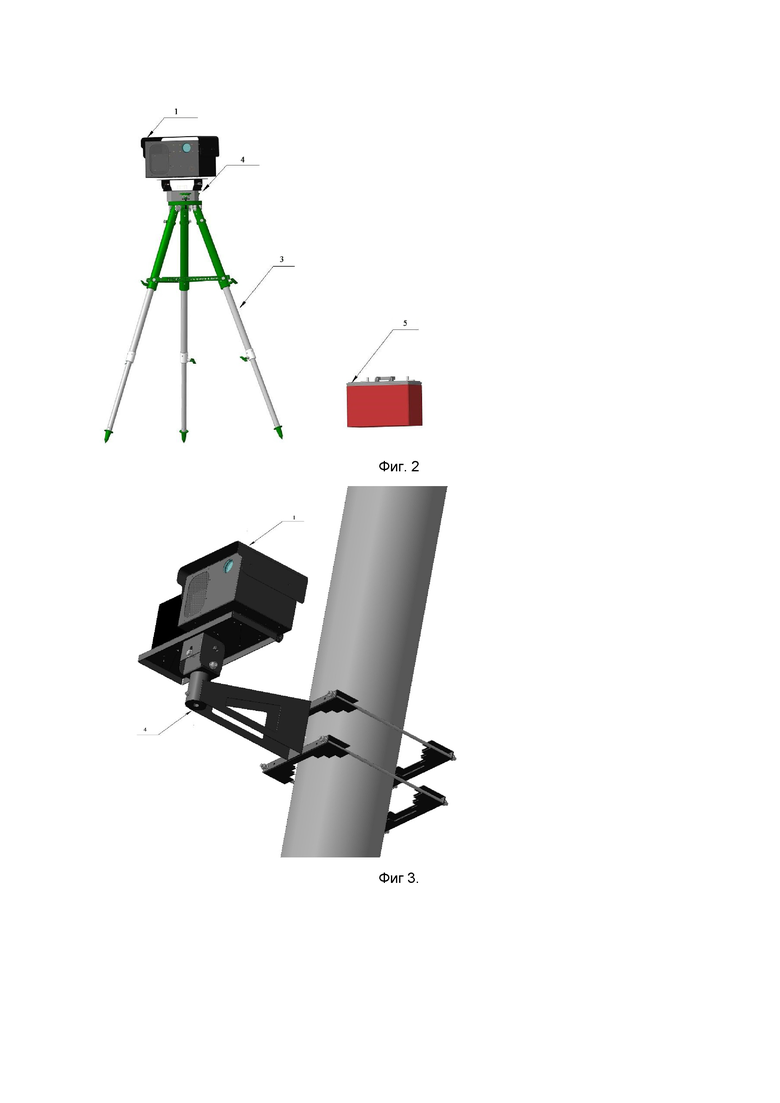
На фиг. 2 представлена система в передвижном исполнении.
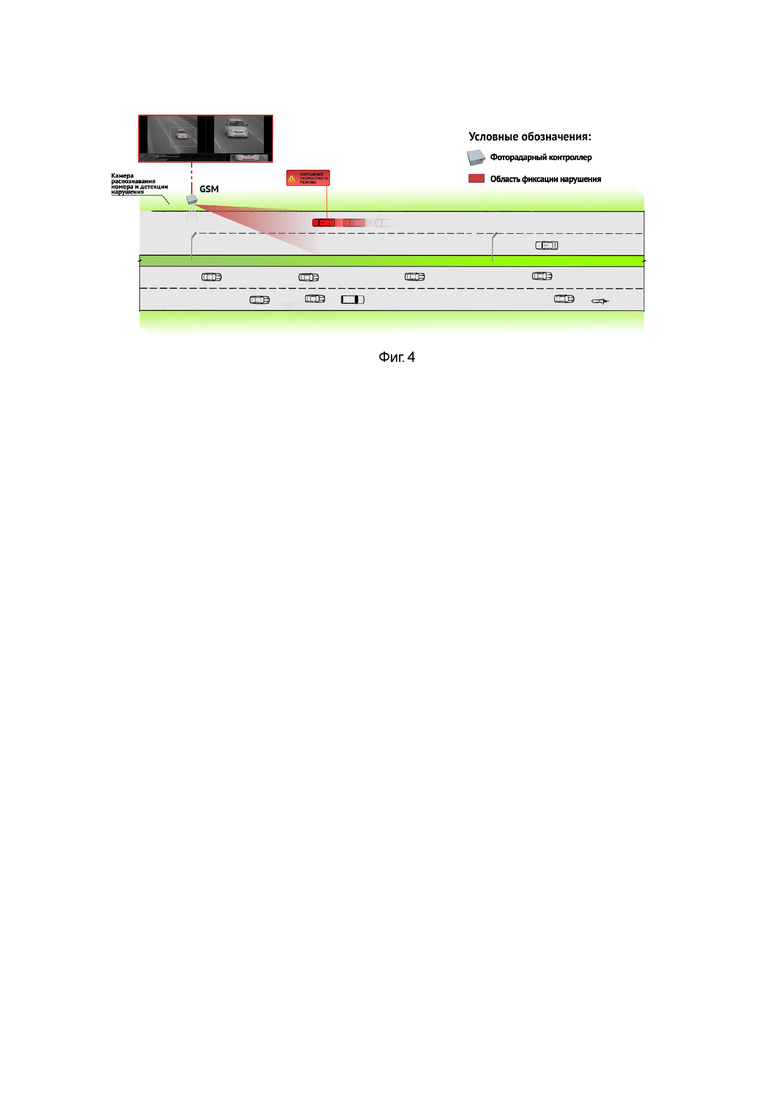
На фиг. 3 представлена система в стационарном исполнении.
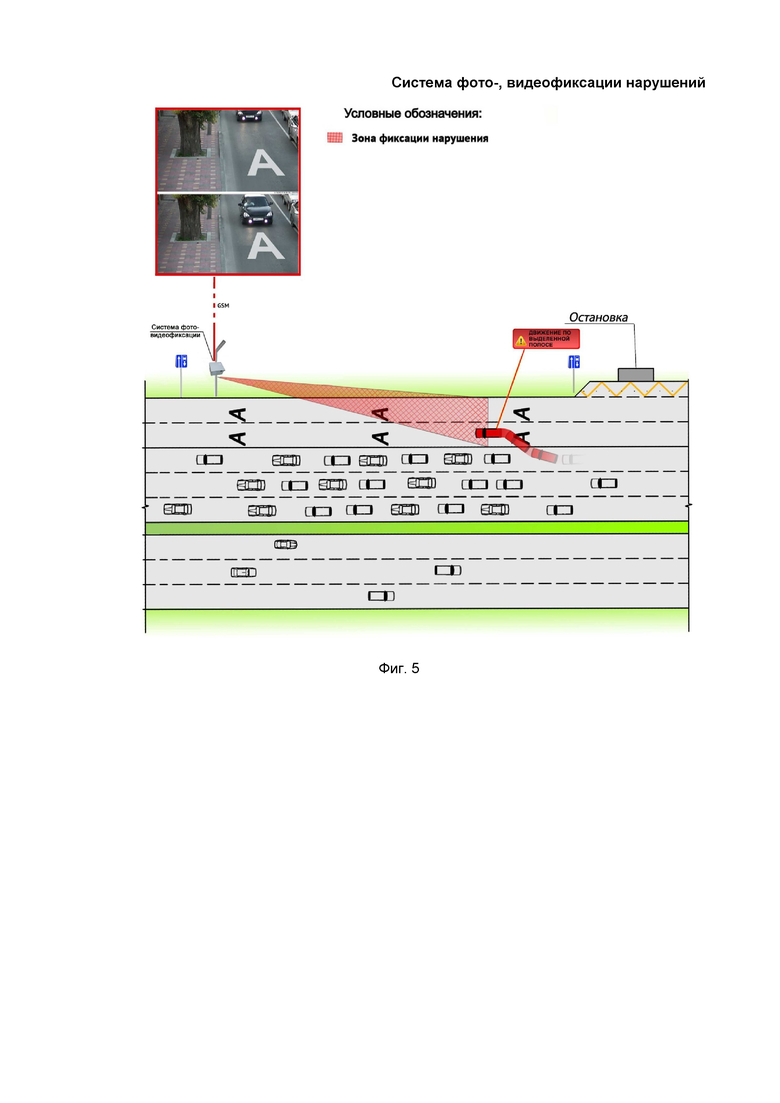
На фиг.4 представлено схематичное изображение использования системы передвижного исполнения для контроля превышения установленной скорости передвижения ТС.
На фиг. 5 представлено схематичное изображение использования системы для контроля расположения ТС на проезжей части дороги, движения по велосипедным или пешеходным дорожкам либо тротуарам, выезд на полосу, предназначенную для встречного движения, не предоставление преимущества в движении маршрутному транспортному средству или транспортному средству с включенными специальными световыми и звуковыми сигналами.
Конструктивно система состоит из, по меньшей мере, одного фоторадарного контроллера 1, по меньшей мере, одного ИК-прожектора 2; а также может содержать штатив 3, поворотную платформу 4 и, по меньшей мере, один блок аккумуляторных батарей 5.
Фоторадарный контроллер 1 конструктивно представляет собой (фиг. 1) блок в пыле-влагозащищенном корпусе, включающий в себя: когерентный радар 1.1, видеокамеру 1.2, вычислительный блок 1.3, устройство передачи данных 1.4, контроллер управления климатом 1.5, GPS/GSM/Wi-Fi-антенны 1.7, - имеющий возможность для подключения периферийных устройств по беспроводному каналу связи и/или Ethernet интерфейсу, а также снабженный панелью индикации 1.8, информирующей об электропитании, наличии тревог и неисправностей. Для обеспечения «холодного старта», предотвращения запотевания и обмерзания стекла фоторадарного контроллера предусмотрены средства терморегуляции 1.6.
Фоторадарный контроллер 1 является основным элементом системы и выполняет функции получения, обработки и обмена информацией, а также имеет возможность сохранения данных о зафиксированных нарушениях на энергозависимом флэш-накопителе фоторадарного контроллера.
ИК-прожектор 2 предназначен для освещения контролируемой территории в ночное время суток на ближних и средних дистанциях. Переключение режима день/ночь происходит в автоматическом режиме.
Штатив 3 предназначен для установки системы, выполненной в передвижном исполнении.
Поворотная платформа 4 предназначена для обеспечения наклона и поворота фоторадарного контроллера 1. В горизонтальной плоскости поворотная платформа 4 вращается по своей оси на 360 градусов, угол наклона составляет 20 градусов.
Блок аккумуляторных батарей 5 предназначен для обеспечения работоспособности системы в передвижном исполнении и имеет защиту от глубокого разряда.
Система работает следующим образом.
Мониторинг транспортного потока, поиск транспортных средств, находящихся в базах розыска, в режиме реального времени, а также фиксация нарушения ПДД, кроме «Превышение установленной скорости движения» (ст. 12.9 КоАП РФ), осуществляется с помощью специального программного обеспечения (СПО) вычислительного блока 1.3 фоторадарного контроллера 1, путем сравнения распознанных государственных регистрационных знаков ТС, попавших в зону видеокамеры 1.2 системы, переданных через устройство передачи данных 1.4, и имеющихся в соответствующей базе данных, установленной в вычислительном блоке 1.3 фоторадарного контроллера 1. При фиксации нарушения и при положительном результате сравнения баз данных, фото-, видеоматериалы и квитанция на оплату соответствующего штрафа с помощью средства передачи данных 1.4 и GSM/Wi-Fi-антенн 1.7 передаются на ЭВМ оператора. Одновременно данные точного времени и географических координат с GPS/GSM/Wi-Fi-антенн 1.7 через устройство передачи данных 1.4 поступает в вычислительный блок 1.3. Информация о нарушениях передается в центр обработки данных по каналу GSM или по другим каналам связи.
Поиск транспортных средств, не имеющих полиса ОСАГО, осуществляется в режиме реального времени путем сравнения распознанных государственных регистрационных знаков ТС, попавших в зону контроля видеокамеры 1.2, с государственными регистрационными знаками ТС, внесенных в базу данных ТС, имеющих полис ОСАГО, установленную в вычислительный блок 1.3 фоторадарного контроллера 1, с помощью СПО вычислительного блока 1.3 фоторадарного контроллера 1. При обнаружении ТС, не имеющего полиса ОСАГО, фото-, видеоматериалы и квитанция на оплату соответствующего штрафа с помощью средства передачи данных 1.4 и GSM/Wi-Fi-антенн 1.7 передаются на ЭВМ оператора. Одновременно данные точного времени и географических координат с GPS/GSM/Wi-Fi-антенн 1.7 через устройство передачи данных 1.4 поступает в вычислительный блок 1.3. Информация о нарушениях передается в центр обработки данных по каналу GSM или по другим каналам связи.
Система имеет возможность автоматической синхронизации шкалы времени системы с национальной шкалой времени РФ UTC (SU), приема и обработки сигналов космических навигационных систем ГЛОНАСС/GPS с помощью GPS/GSM/Wi-Fi-антенны 1.7, входящих в состав системы, и записи текущего момента и/или интервала времени в сохраняемые фото- и видеокадры.
Принцип работы системы в области автоматической фото-, видеофиксации транспортных средств, превысивших установленный порог скорости в зоне контроля в соответствии со ст. 12.9 КоАП РФ «Превышение установленной скорости движения», основан на эффекте Доплера: измерении скорости ТС по разнице частот между радиолокационным сигналом, излученным когерентным радаром 1.1, входящим в состав фоторадарного контроллера 1, и сигналом, отраженным от движущихся транспортных средств. Данные о разнице частот когерентного радара 1.1 и видеопоток, полученный с видеокамеры 1.2 через устройство передачи данных 1.4 поступает на обработку, анализ и хранение в вычислительный блок 1.3. Одновременно данные точного времени и географических координат с GPS/GSM/Wi-Fi-антенн 1.7 через устройство передачи данных 1.4 поступает в вычислительный блок 1.3. В случае превышения скоростного режима одним или группой транспортных средств в вычислительном блоке 1.3 формируется фото-, видеоматериалы доказательной базы и квитанция на оплату соответствующего штрафа. Все сформированные материалы через GSM/Wi-Fi-антенны 1.7 передаются на ЭВМ оператора.
В темное время суток по команде переданной вычислительным блоком 1.3 через контроллер управления климатом 1.5 включается ИК-прожектор 2.
В холодное время года, когда температура ниже установленного минимума, контроллер управления климатом 1.5 по данным от средства терморегулирования 1.6 осуществляет «холодный старт» системы и/или поддерживает оптимальную температуру внутри фоторадарного контроллера 1.
Система фото-, видеофиксации нарушения скоростного режима может быть исполнена в двух вариантах.
Вариант 1. В передвижном исполнении (фиг. 2) в состав системы фото-, видеоконтроля входит фоторадарный контроллер 1, устанавливающийся на поворотную платформу 4 штатива 3 и подключающийся с помощью кабеля питания к блоку аккумуляторных батарей 5. Для работы в темное время суток имеется возможность подключения ИК-прожектора 2. Полученная система фото-видеофиксации устанавливается у края проезжей части дороги (фиг. 4) в соответствии с национальными стандартами общих технических требований и правил использования специальных технических средств, работающих в автоматическом режиме и имеющих функции фото и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением. В специальном программном обеспечении, устанавливаемом на электронно-вычислительной машине пользователя, отображается зона контроля видеокамеры фоторадарного контроллера в режиме реального времени.
Данные когерентного радара 1.1 и/или фото-, видеоматериалы видеокамеры 1.2 через средство передачи данных 1.4 поступают в вычислительный блок 1.3. При фиксировании нарушений СПО вычислительного блока 1.3 формирует доказательную базу, включающую фото- и видеоматериалы, имеющие записи текущего интервала времени, полученные при приеме и обработки сигналов космический навигационных систем ГЛОНАСС/GPS с помощью GPS/GSM/Wi-Fi-антенн 1.7, входящих в состав системы, и квитанцию оплаты штрафа, и передает их через средство передачи данных 1.4 на электронно-вычислительную машину пользователя. Информация о нарушениях передается в центр обработки данных по каналу GSM или по другим каналам связи.
Вариант 2. В стационарном исполнение (фиг. 3) в состав системы входит, по меньшей мере, один фоторадарный контроллер 1, по меньшей мере, один ИК-прожектор 2, по меньшей мере, одна поворотная платформа 4. Фоторадарный контроллер 1 совместно с ИК-прожектором 2 устанавливается на поворотную платформу 4, обеспечивающую необходимый угол наклона и поворота, и закрепляются на стандартные опоры дорожного освещения, размещаемые как у края проезжей части, так и на разделительной полосе в центре дорожного полотна, и/или на элементы дорожной инфраструктуры (фиг. 5) в соответствии с национальными стандартами общих технических требований и правил использования специальных технических средств, работающих в автоматическом режиме и имеющих функции фото и киносъемки, видеозаписи, для обеспечения контроля за дорожным движением. Перед первым запуском в СПО вычислительного блока 1.3 фоторадарного контроллера 1 настраиваются типы нарушений, фиксирующихся системой.
Данные когерентного радара 1.1 и/или фото-, видеоматериалы видеокамеры 1.2 через средство передачи данных 1.4 поступает в вычислительный блок 1.3. При фиксировании нарушений СПО вычислительного блока 1.3 формирует доказательную базу, включающую фото- и видеоматериалы, имеющие записи текущего интервала времени, полученные при приеме и обработки сигналов космический навигационных систем ГЛОНАСС/GPS с помощью GPS/GSM/Wi-Fi-антенн 1.7, входящих в состав системы, и квитанцию оплаты штрафа, и передает их через средство передачи данных 1.4 на электронно-вычислительную машину пользователя. Информация о нарушениях передается в центр обработки данных по каналу GSM или по другим каналам связи.
Использование системы фото-, видеофиксации нарушений ПДД позволяет проводить мониторинг транспортных средств с одновременным подсчетом ТС, проехавших в единицу времени, поиска ТС находящего в розыске, поиск ТС находящего в розыске, поиск транспортных средств, не имеющих полис ОСАГО, а также автоматическую фото, видеофиксацию транспортных средств в зоне контроля в соответствии с главой 12 КоАП РФ «Административные правонарушения в области дорожного движения».
Изобретение относится к области контроля движения дорожного транспорта. Способ работы системы фото-, видеофиксации нарушений правил дорожного движения заключается в том, что мониторинг транспортного потока, поиск транспортных средств, находящихся в розыске и/или не имеющих полиса ОСАГО, осуществляется с помощью специального программного обеспечения вычислительного блока фоторадарного контроллера. Видеопоток с видеокамеры фоторадарного контроллера через устройство передачи данных поступает в вычислительный блок фоторадарного контроллера, где сравниваются распознанные государственные регистрационные знаки транспортных средств, попавших в зону видеокамеры и имеющихся в соответствующей базе данных, установленной в вычислительном блоке, и при положительном результате сравнения и/или фиксации нарушения ПДД фото-, видеоматериалы с помощью средства передачи данных и GSM/Wi-Fi-антенн передаются на ЭВМ оператора и/или центр обработки данных по каналу GSM или по другим каналам связи. Достигается упрощенный и надежный способ регистрации нарушений правил дорожного движения. 1 з.п. ф-лы, 5 ил.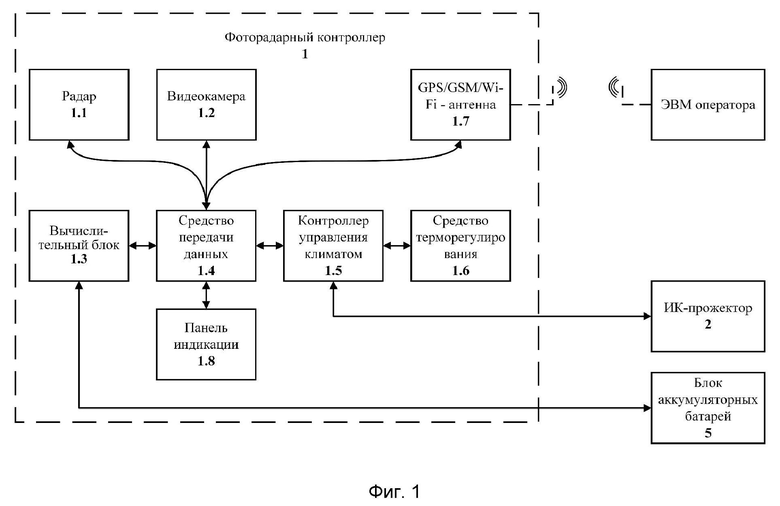
1. Способ работы системы фото-, видеофиксации нарушений правил дорожного движения, заключающийся в том, что мониторинг транспортного потока, поиск транспортных средств, находящихся в розыске и/или не имеющих полиса ОСАГО, а также фиксация нарушения ПДД, кроме «Превышение установленной скорости движения», осуществляется с помощью специального программного обеспечения вычислительного блока фоторадарного контроллера, при этом видеопоток с видеокамеры фоторадарного контроллера через устройство передачи данных поступает в вычислительный блок фоторадарного контроллера, где сравниваются распознанные государственные регистрационные знаки транспортных средств, попавших в зону видеокамеры и имеющихся в соответствующей базе данных, установленной в вычислительном блоке, и при положительном результате сравнения и/или фиксации нарушения ПДД фото-, видеоматериалы с помощью средства передачи данных и GSM/Wi-Fi-антенн передаются на ЭВМ оператора и/или центр обработки данных по каналу GSM или по другим каналам связи.
2. Способ работы системы по п. 1 в области автоматической фото-, видеофиксации транспортных средств, превысивших установленный порог скорости в зоне контроля, отличающийся тем, что скорость транспортного средства измеряют по разнице частот между радиолокационным сигналом, излученным когерентным радаром, и сигналом, отраженным от движущихся транспортных средств, с последующей передачей данных, полученных с когерентного радара, и видеопотока, полученного с видеокамеры фоторадарного контроллера, для обработки анализа и хранения в вычислительный блок; при этом в вычислительный блок через устройство передачи данных поступают данные точного времени и географических координат с GPS/GSM/Wi-Fi-антенн; и при положительном результате сравнения и/или фиксации нарушения ПДД фото-, видеоматериалы с помощью средства передачи данных и GSM/Wi-Fi-антенн передаются на ЭВМ оператора и/или центр обработки данных по каналу GSM или по другим каналам связи.
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| СПОСОБ ПОЛУЧЕНИЯ ФОСФОРСОДЕРЖАЩИХ | 0 |
|
SU164432A1 |
| НАВЕСНАЯ СТРЕЛА С ВАКУУМНЫМ ЗАХВАТОМ | 0 |
|
SU179452A1 |
| СПОСОБ РЕГИСТРАЦИИ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ | 2012 |
|
RU2493604C1 |
| US 5935190 A1, 10.08.1999. | |||

