УРОВЕНЬ ТЕХНИКИ
[1] Настоящее раскрытие сущности изобретения относится к контроллеру транспортного средства, который осуществляет управление движением транспортного средства на основе различных режимов движения, запланированных для транспортного средства. В транспортном средстве применяется двигатель внутреннего сгорания и электродвигатель в качестве приводных установок.
[2] Гибридный автомобиль с подзарядкой от электросети хорошо известен в уровне техники как транспортное средство, которое оснащается двигателем внутреннего сгорания и электродвигателем в качестве приводных установок. Такое транспортное средство перемещается в режимах, включая первый режим, который служит в качестве режима разрядки (далее, CD режим) и при котором расходуется энергия аккумуляторной батареи, и второй режим, который служит в качестве режима поддержания зарядки (далее, CS режим), при котором заряд аккумуляторной батареи поддерживается на одном уровне. Например, режим разрядки дает приоритет движению в режиме электромобиля (РЭМ), при котором транспортное средство приводится в движение электродвигателем, а двигатель внутреннего сгорания остановлен. Таким образом, использование двигателя внутреннего сгорания ограничено или запрещено. CS режим дает приоритет движению в режиме гибридного транспортного средства, при котором двигатель внутреннего сгорания и электродвигатель используются совместно для поддержания количества аккумулированной энергии аккумуляторной батареи.
[3] В японской патентной публикации №2009-12605, опубликованной для ознакомления, описывается контроллер транспортного средства, который осуществляет управление движением транспортного средства путем расчета маршрута, включая различные зоны, от начальной точки до места назначения, и планирование выбора первого режима и второго режима для каждой зоны рассчитанного маршрута в качестве режима движения для транспортного средства.
[4] В устройстве, описываемом в японской патентной публикации №2009-12605, опубликованной для ознакомления, второй режим применяется к зоне, в которой средняя скорость движения транспортного средства по маршруту будет максимальной, а первый режим применяется ко всем остальным зонам. Затем устройство рассчитывает состояние заряда аккумуляторной батареи, которое бы имело место, когда транспортное средство движется в используемом режиме от текущего местоположения и достигает места назначения. Когда расчетное значение меньше минимального предела, который соответствует состоянию разрядки аккумуляторной батареи, устройство меняет режим зоны со второй максимальной средней скоростью движения транспортного средства с первого режима на второй режим и рассчитывает состояние заряда аккумуляторной батареи, которое бы имело место, когда транспортное средство достигает места назначения.
[5] Устройство последовательно меняет режим зон с более высокой средней скоростью движения транспортного средства с первого режима на второй режим, чтобы в месте назначения расчетное значение состояние заряда аккумуляторной батареи было приближено к минимальному пределу и превышало минимальный предел. Когда расчетное значение состояния заряда аккумуляторной батареи сохраняется на уровне выше минимального предела, когда транспортное средство достигает места назначения, устройство планирует режимы движения для транспортного средства с использованием текущего применяемого режима для каждой зоны.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[6] Устройство, описываемое в японской патентной публикации №2009-12605, опубликованной для ознакомления, планирует назначение режимов так, что при движении транспортного средства по маршруту от начальной точки до места назначения устройство активно задействует электродвигатель в зонах, подходящих для движения в режиме электромобиля, с потреблением энергии аккумуляторной батареи, чтобы расчетное значение состояния заряда аккумуляторной батареи было приблизительно равным или превышало минимальный предел, когда транспортное средство достигает места назначения. Это позволяет уменьшить количество выбросов, которые бы производились при использовании двигателя внутреннего сгорания. Однако получение таких полезных эффектов можно ожидать, только когда транспортное средство движется по маршруту, для которого имеется план режимов. Когда транспортное средство отклоняется от этого маршрута, не всегда удается получить этот полезный эффект от использования энергии аккумуляторной батареи.
[7] Задача настоящего раскрытия изобретения состоит в том, чтобы предложить контроллер транспортного средства, который увеличивает потребление энергии аккумуляторной батареи, даже когда транспортное средство отклоняется от запланированного маршрута.
[8] Один из аспектов настоящего раскрытия изобретения включает в себя контроллер транспортного средства, который осуществляет контроль движения транспортного средства. Транспортное средство выбирает один из режимов, первый режим или второй режим, в качестве режима движения, и двигается в выбранном режиме движения. Транспортное средство расходует энергию аккумуляторной батареи при движении в первом режиме и поддерживает зарядку аккумуляторной батареи при движении во втором режиме. Транспортное средство перемещается из начальной точки в место назначения по маршруту, который состоит из различных зон. Контроллер транспортного средства включает в себя блок планирования движения и блок управления. Блок планирования движения выполнен с возможностью формирования плана движения, который назначает один из режимов, первый режим или второй режим, для каждой зоны, включенной в маршрут. Блок управления выполнен с возможностью управления движением транспортного средства на основе сформированного плана движения. Блок управления выполнен с возможностью установления режима движения транспортного средства в первый режим, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения.
[9] В соответствии с описанием выше, план движения в нормальном режиме назначает режимы так, чтобы энергия аккумуляторной батареи расходовалась. В связи с этим, в конфигурации, указанной выше, даже когда транспортное средство отклоняется от этого маршрута, который соответствует сформированному плану движения, режим движения транспортного средства в принудительном порядке переключается в первый режим. Это увеличивает потребление энергии аккумуляторной батареи и позволяет избежать ситуации, в которой неиспользованная энергия остается в аккумуляторной батарее из-за отклонения транспортного средства от запланированного маршрута.
[10] В одном из режимов упомянутого контроллера транспортного средства, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, а затем возвращается на этот маршрут, блок управления выполнен с возможностью сохранения режима движения транспортного средства в первом режиме в течение заранее предусмотренного периода времени или в пределах заранее предусмотренного расстояния, независимо от сформированного плана движения.
[11] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, и движется в первом режиме, транспортное средство продолжает двигаться в первом режиме до тех пор, пока не истечет заранее предусмотренное время или до тех пор, пока транспортное средство не преодолеет заранее предусмотренное расстояние, независимо от режима, назначенного для зоны маршрута, в которую возвращается транспортное средство, и даже, когда оно возвращается на этот маршрут и затем сразу же снова отклоняется от этого маршрута. Это ограничивает возникновение так называемого "виляния", когда часто повторяется переключение между первым режимом и вторым режимом, независимо от содержания плана движения маршрута, на который возвращается транспортное средство, и когда происходит повторяющееся отклонение транспортного средства от этого маршрута.
[12] В одном из режимов упомянутого контроллера транспортного средства, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, а затем возвращается на этот маршрут, блок управления выполнен с возможностью сохранения режима движения транспортного средства в первом режиме в зоне маршрута, где транспортное средство движется вначале, после возвращения, независимо от сформированного плана движения.
[13] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения, и движется в первом режиме, транспортное средство может вернуться в зону маршрута, для которой назначается второй режим. Даже в этом случае транспортное средство продолжает движение по зоне в первом режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда транспортное средство возвращается в зону маршрута, для которой назначается второй режим, но остаток пути в этой зоне короткий, а следующей зоне назначается второй режим.
[14] В одном из режимов упомянутого контроллера транспортного средства, когда транспортное средство отклоняется от маршрута, соответствующего пути движения, а затем возвращается на этот маршрут, если второй режим назначается для зоны маршрута, где транспортное средство движется вначале после возвращения, а расстояние до зоны, где первый режим назначается первый раз после зоны, где транспортное средство движется вначале после возвращения, меньше или равно фиксированному расстоянию, блок управления выполнен с возможностью сохранения режима движения транспортного средства в первом режиме, по меньшей мере, до зоны, для которой назначается первый режим первый раз после зоны, где транспортное средство движется вначале после возвращения.
[15] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения и движется в первом режиме, транспортное средство может вернуться в зону маршрута, для которой назначен второй режим. Даже в этом случае, если расстояние до зоны, для которой назначается первый режим первый раз после первой зоны после возвращения меньше или равно фиксированному расстоянию, транспортное средство продолжает движение в первом режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда расстояние до зоны, для которой назначается первый режим и которая расположена после зоны, в которую возвращается транспортное средство, меньше фиксированного расстояния.
[16] В одном из режимов контроллера транспортного средства, указанного выше, блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения. Когда транспортное средство отклоняется от маршрута и происходит перерасчет маршрута, блок управления выполнен с возможностью сохранения режима движения транспортного средства в первом режиме в течение заранее установленного периода времени или в пределах заранее установленного расстояния, независимо от нового сформированного плана движения.
[17] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, который соответствует плану движения, транспортное средство движется в первом режиме. Затем, после истечения фиксированного периода времени, выполняется перерасчет для формирования нового плана движения. Независимо от содержания нового сформированного плана движения, и даже когда транспортное средство сразу же отклоняется от перерассчитанного маршрута, транспортное средство продолжает движение в первом режиме до тех пор, пока не истечет заранее установленный период времени или пока транспортное средство не преодолеет заранее установленное расстояние. Таким образом, возникновение так называемого "виляния", когда часто повторяется переключение между первым режимом и вторым режимом, может быть ограничено независимо от содержания плана движения маршрута и повторяющегося отклонения от маршрута.
[18] В одном из режимов контроллера транспортного средства, указанного выше, блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения. Когда транспортное средство отклоняется от маршрута и происходит перерасчет маршрута, блок управления выполнен с возможностью сохранения режима движения транспортного средства в первом режиме в зоне маршрута, куда транспортное средство возвращается вначале после перерасчета, независимо от нового сформированного плана движения.
[19] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, который соответствует плану движения, и движется в первом режиме, маршрут перерассчитывается для формирования нового плана движения после истечения фиксированного периода времени. Даже когда для первой зоны перерассчитанного маршрута назначается второй режим, транспортное средство продолжает движение в первой зоне перерассчитанного маршрута в первом режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда для первой зоны перерассчитанного маршрута назначается второй режим, но остаток пути в этой зоне короткий, а следующей зоне назначается первый режим.
[20] В одном из режимов контроллера транспортного средства, указанного выше, блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения. Когда транспортное средство отклоняется от маршрута и выполняется перерасчет маршрута, если второй режим назначается для зоны маршрута, где транспортное средство движется вначале после перерасчета, а расстояние до зоны, где первый режим назначается первый раз после зоны, где транспортное средство движется вначале после перерасчета, меньше или равно фиксированному расстоянию, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме, по меньшей мере, до зоны, для которой назначается первый режим первый раз после зоны, где транспортное средство движется вначале после перерасчета.
[21] В конфигурации, указанной выше, когда транспортное средство отклоняется от маршрута, который соответствует плану движения, и движется в первом режиме, маршрут перерассчитывается для формирования нового плана движения после истечения фиксированного периода времени. Даже когда для первой зоны перерассчитанного маршрута назначается второй режим, если расстояние до зоны, для которой назначается первый режим первый раз после этой первой зоны, меньше или равно фиксированному расстоянию, транспортное средство продолжает движение в первом режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда расстояние до зоны, для которой назначается первый режим и которая расположена после зоны, включающей первую зону нового сформированного плана движения, меньше фиксированного расстояния.
[22] В одном из режимов контроллера транспортного средства, указанного выше, когда отклонение транспортного средства от маршрута или перерасчет повторяется заранее установленное количество раз или более, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме, а блок планирования движения выполнен с возможностью приостановки формирования плана движения.
[23] В конфигурации, указанной выше, даже когда формирование плана движения прерывается, приоритет дается первому режиму. Это позволяет избежать ситуации, когда неиспользованная энергия остается в аккумуляторной батарее.
[24] Другой аспект настоящего раскрытия изобретения включает в себя контроллер транспортного средства, который осуществляет контроль движения транспортного средства. Транспортное средство выбирает один из режимов, первый режим или второй режим, в качестве режима движения, и двигается в выбранном режиме движения. Транспортное средство дает приоритет движению с приводом от электродвигателя, привод от двигателя внутреннего сгорания ограничен или запрещен при движении в первом режиме. Во втором режиме задействован, как минимум, один из приводов: электродвигатель и двигатель внутреннего сгорания. Транспортное средство перемещается по маршруту из начальной точки к месту назначения, который состоит из различных зон. Контроллер транспортного средства включает в себя блок планирования движения и блок управления. Блок планирования движения формирует план движения, который назначает один из режимов, первый режим или второй режим, в качестве режима движения для каждой зоны, включенной в маршрут. Блок управления управляет движением транспортного средства на основе сформированного плана движения. Блок управления выполнен с возможностью принудительного установления режима движения транспортного средства в первый режим, когда транспортное средство отклоняется от маршрута, который соответствует плану движения.
[25] В соответствии с вышеописанным, план движения, как правило, назначает режимы так, чтобы расходовалась энергия аккумуляторной батареи. В связи с этим, в конфигурации, указанной выше, даже когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения, режим движения транспортного средства в принудительном порядке переключается в первый режим. Это увеличивает работу от аккумуляторной батареи и позволяет избежать ситуации, в которой неиспользуемая энергия остается в аккумуляторной батарее из-за отклонения транспортного средства от запланированного маршрута.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[26] Данное раскрытие сущности изобретения с учетом его целей и преимуществ лучше всего раскрывается в последующем описании предпочтительных на данный момент вариантов осуществления изобретения с соответствующими чертежами, где:
на Фиг. 1 представлена блок-схема, на которой показана структура первого варианта осуществления контроллера транспортного средства (ТС);
на Фиг. 2 представлена блок-схема, на которой показаны процедуры процесса управления режимом, которые выполняются контроллером транспортного средства в соответствии с первым вариантом осуществления;
на Фиг. 3 представлена схема, на которой показан пример управления режимом, выполняемого контроллером транспортного средства в соответствии с первым вариантом осуществления, на маршруте в соответствии с планом движения и на маршруте с отклонением от него;
на Фиг. 4 представлена схема, на которой показан пример маршрута без информации о маршруте;
на Фиг. 5 представлена схема, на которой показан другой пример маршрута без информации о маршруте;
на Фиг. 6 представлена блок-схема, на которой показаны процедуры процесса управления режимом, выполняемого вторым вариантом осуществления контроллера транспортного средства;
на Фиг. 7 представлена схема, на которой показан пример управления режимом, выполняемого контроллером транспортного средства, в соответствии со вторым вариантом осуществления изобретения на маршруте в соответствии с планом движения и на маршруте с отклонением от него;
на Фиг. 8 представлена схема, на которой показан другой пример управления режимом, выполняемого контроллером транспортного средства, в соответствии со вторым вариантом осуществления изобретения на маршруте в соответствии с планом движения и на маршруте с отклонением от него;
на Фиг. 9 представлена схема, на которой показан другой пример управления режимом, выполняемого контроллером транспортного средства, в соответствии со вторым вариантом осуществления изобретения на маршруте в соответствии с планом движения, на маршруте с отклонением от него и на перерассчитанном маршруте;
на Фиг. 10 представлена блок-схема, на которой показаны процедуры процесса управления режимом, которые выполняются контроллером транспортного средства, в соответствии с третьим вариантом осуществления;
на Фиг. 11 представлена схема, на которой показан пример управления режимом, выполняемого контроллером транспортного средства, в соответствии с третьим вариантом осуществления на маршруте в соответствии с планом движения и на маршруте с отклонением от него;
на Фиг. 12 представлена схема, на которой показан другой пример управления режимом, выполняемого контроллером транспортного средства, в соответствии с третьим вариантом осуществления изобретения на маршруте в соответствии с планом движения, на маршруте с отклонением от него и на перерассчитанном маршруте;
на Фиг. 13 представлена блок-схема, на которой показаны процедуры процесса управления режимом, которые выполняются контроллером транспортного средства, в соответствии с четвертым вариантом осуществления;
на Фиг. 14 представлена схема, на которой показан пример управления режимом, выполняемого контроллером транспортного средства, в соответствии с четвертым вариантом осуществления на маршруте в соответствии с планом движения и на маршруте с отклонением от него;
на Фиг. 15 представлена схема, на которой показан другой пример управления режимом, выполняемого контроллером транспортного средства, в соответствии с четвертым вариантом осуществления изобретения на маршруте в соответствии с планом движения, на маршруте с отклонением от него и на перерассчитанном маршруте;
на Фиг. 16 представлена блок-схема, на которой показан частично модифицированный пример процесса, показанного на фиг. 6, в модифицированном примере в соответствии со вторым вариантом осуществления;
на Фиг. 17 представлена блок-схема, на которой показаны процедуры дополнительного процесса в каждом варианте осуществления; и
на Фиг. 18 представлена блок-схема, на которой показан модифицированный пример дополнительного процесса, показанного на фиг. 17.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[27] Первый вариант осуществления изобретения
Первый вариант осуществления контроллера транспортного средства описывается со ссылками на фиг. 1-3. Контроллер транспортного средства в соответствии с первым вариантом осуществления - это устройство, которое устанавливается на транспортное средство 100, на котором используется двигатель внутреннего сгорания 131 и электродвигатель 140 в качестве приводных механизмов, и управляет режимом движения транспортного средства 100. Транспортное средство 100, например, является гибридным автомобилем с подзарядкой от электросети.
[28] Далее описывается структура контроллера транспортного средства в соответствии с первым вариантом осуществления.
Транспортное средство 100 передвигается в двух режимах. Один режим - CS режим (режим разрядки), при котором расходуется энергия аккумуляторной батареи 113, служит в качестве первого режима. Другой режим - CS режим (режим поддержания зарядки), при котором поддерживается зарядка аккумуляторной батареи 113, служит в качестве второго режима. Например, CD режим дает приоритет движению в режиме электромобиля, при котором транспортное средство 100 приводится в движение только электродвигателем 140, а двигатель внутреннего сгорания 131 остановлен. Таким образом, расходуется энергия аккумуляторной батареи 113. Режим поддержания зарядки дает приоритет движению в режиме гибридного транспортного средства, при котором двигатель внутреннего сгорания 131 и электродвигатель 140 используются в качестве приводных агрегатов. Таким образом, поддерживается заряд аккумуляторной батареи 113. Кроме того, транспортное средство 100 включает в себя навигационную систему 120, которая прокладывает маршрут от начальной точки до места назначения, если задано место назначения. Кроме того, гибридный контроллер 110 включает в себя блок 150 помощи при движении, который назначает один из режимов: CD режим или CS режим, для зоны, включенной в проложенный маршрут для формирования плана движения. В данном случае план движения не включает в себя прокладывание маршрута, а относится только к назначению режима для проложенного маршрута. В целом, план движения снижает количество выбросов в сравнении с движением без использования плана движения. Образуется меньшее количество выбросов, поскольку транспортное средство 100 преодолевает большее расстояние в режиме электромобиля.
[29] Как показано на фиг. 1, контроллер транспортного средства применяется на транспортном средстве 100, которое включает в себя блок 101 определения местоположения или другое подобное устройство в качестве компонента для получения информации о состоянии транспортного средства 100. Такой компонент присоединяется через бортовую сеть NW, такую как локальная сеть контроллеров (далее, сеть CAN) или другую подобную сеть, к различным контроллерам, включая контроллер 130 двигателя внутреннего сгорания 130, гибридный контроллер 110, навигационный контроллер 121 и контроллер дисплея 124. Контроллер 130 двигателя внутреннего сгорания управляет движением с приводом от двигателя внутреннего сгорания 131. Гибридный контроллер 110 управляет движением от электродвигателя 140. Каждый контроллер является так называемым электронным блоком управления (ЭБУ) и включает в себя микрокомпьютер с блоком арифметических вычислений и памятью. Каждый контроллер выполняет различные управляющие действия, когда блок арифметических вычислений обрабатывает программы и параметры, которые хранятся в памяти.
[30] Блок 101 определения местоположения определяет текущее местоположение транспортного средства 100. Блок 101 определения местоположения включает в себя, например, систему глобального позиционирования (GPS). Система GPS получает сигнал от спутника GPS и определяет текущее местоположение транспортного средства 100 на основе полученного спутникового GPS-сигнала. Блок 101 определения местоположения выдает информацию, которая указывает на текущее местоположение, например, широта и долгота текущего местоположения. В дополнение к спутниковому GPS-сигналу или вместо спутникового GPS-сигнала блок определения местоположения 101 может быть выполнен с возможностью определения текущего местоположения транспортного средства 100 с использованием других спутниковых сигналов или с использованием коммуникационной системы "дорога-автомобиль".
[31] Кроме того, транспортное средство 100 включает в себя навигационную систему 120, которая прокладывает маршрут для транспортного средства 100. Навигационная система 120 включает в себя базу 122 данных картографической информации, в которой хранится картографическая информация, навигационный контроллер 121, который выполняет прокладывание маршрута транспортного средства 100, используя картографическую информацию, хранящуюся в базе 122 данных картографической информации.
[32] Картографическая информация, которая хранится в базе 122 данных картографической информации, содержит данные об узлах, которые указывают на местоположение на дороге, а также данные о соединениях между двумя соседними узлами (участках маршрута между двумя соседними узлами). Информация об узлах содержит данные о местоположении узлов и дорожную информацию узлов. Информация о соединениях содержит дорожную информацию о соединениях. Дорожная информация, включенная в информацию о соединении, содержит данные по транспортной нагрузке применительно к транспортному средству 100 во время движения. В этом случае транспортная нагрузка определяется на основе продолжительности движения, скорости движения, расхода топлива, расхода электроэнергии и т.д. В качестве альтернативы транспортная нагрузка может быть рассчитана из параметров, включающих в себя информацию, содержащую данные об углах подъема/спуска и массе транспортного средства 100.
[33] Навигационный контроллер 121 получает информацию, которая указывает на текущее местоположение транспортного средства 100, от блока определения местоположения 101. Кроме того, когда водителем или кем-то задано место назначения, навигационный контроллер 121 выполняет поиск маршрута от начальной точки движения транспортного средства 100 до места назначения с привязкой к базе 122 данных картографической информации с помощью алгоритма Дейкстры или др. Несмотря на то что начальная точка движения транспортного средства 100 обычно совпадает с текущим местоположением транспортного средства 100, возможно раздельное указание начальной точки и места назначения. Далее навигационный контроллер 121 передает полную информацию о соединении, включенную в искомый маршрут, и информацию о транспортной нагрузке, включенную в информацию о соединении, в гибридный контроллер 110 через бортовую сеть NW.
[34] Транспортное средство 100 также включает в себя аккумуляторную батарею 113, которая функционирует в качестве источника для электродвигателя 140, и регулятор аккумуляторной батареи 112, который управляет зарядкой и разрядкой аккумуляторной батареи 113. Аккумуляторная батарея 113 заряжается через регулятор аккумуляторной батареи 112 от внешнего источника энергии при подключении к розетке (не показана). Регулятор аккумуляторной батареи 112 присоединяется через бортовую сеть NW к различным контроллерам, включающим контроллер 130 двигателя внутреннего сгорания, гибридный контроллер 110 и навигационный контроллер 121.
[35] Гибридный контроллер 110 используется для того чтобы задать настоящее распределение (отношение выходной мощности) приводного усилия двигателя внутреннего сгорания 131 и электродвигателя 140. Кроме того, гибридный контроллер 110 используется для помощи при движении по маршруту и для обеспечения движения транспортного средства 100 в режиме, который назначен для зоны, в которой транспортное средство 100 находится в настоящее время.
[36] В частности, гибридный контроллер 110 задает распределение приводного усилия на основе данных от датчика ускорения, датчика скорости транспортного средства, датчика акселератора и т.д. (не показаны). Кроме того, на основе распределения приводного усилия, гибридный контроллер 110 генерирует управляющую команду для регулятора аккумуляторной батареи 112 в отношении разрядки, или подобную команду, аккумуляторной батареи 113 и информацию, относящуюся к значению для управления двигателя внутреннего сгорания 131, которая рассчитывается контроллером двигателя внутреннего сгорания 130. Гибридный контроллер 110 задает распределение тормозящего усилия для тормозов и электродвигателя 140 на основе полученных результатов от датчика ускорения, датчика скорости транспортного средства и датчика тормозов. Кроме того, на основе распределения приводного усилия, гибридный контроллер 110 генерирует управляющую команду для регулятора аккумуляторной батареи 112 в отношении зарядки, или подобную команду, аккумуляторной батареи 113, и информацию, относящуюся к контрольному значению для тормозов, которое рассчитывается контроллером двигателя внутреннего сгорания 130. Т.е. при выдаче генерированной управляющей команды регулятору аккумуляторной батареи 112 гибридный контроллер 110 управляет зарядкой и разрядкой аккумуляторной батареи 113. В частности, разрядка аккумуляторной батареи 113, служащей в качестве источника энергии для электродвигателя 140, приводит к активации электродвигателя 140, а при рекуперации электродвигателя 140 происходит зарядка аккумуляторной батареи 113.
[37] Гибридный контроллер 110 включает в себя блок 150 помощи при движении, который получает данные о маршруте транспортного средства 100 от навигационного контроллера 121 и выдает вспомогательную информацию при движении транспортного средства 100 в соответствии с полученным маршрутом. Блок 150 помощи при движении включает в себя блок 151 планирования режимов, который действует в качестве блока планирования движения. Блок 151 планирования режимов формирует план движения, в котором один из режимов, CD режим или CS режим, назначается различным соединениям, включенным в маршрут, полученный от навигационного контроллера 121. В данном случае блок, которому назначается один из режимов, CD режим или CS режим, может быть не только соединением, при условии, что маршрут может разделяться в соответствии с транспортной нагрузкой.
[38] На фиг. 3 показан пример плана движения, в котором последовательные соединения, для которых назначен один и тот же режим, указаны как одна зона, для наглядности. Таким образом, в плане движения, показанном на фиг. 3, маршрут от первоначальной точки S до места назначения G включает в себя 3 зоны. Кроме того, в плане движения, как показано на фиг. 3, "Зона режима разрядки" (далее, CD зона) относится к зоне, для которой назначается режим разрядки, а "Зона режима поддержания зарядки" (далее, CS зона) относится к зоне, для которой назначается режим поддержания зарядки.
[39] В частности, в CD режиме происходит активное расходование энергии аккумуляторной батареи 113 и не происходит поддержание зарядки аккумуляторной батареи 113. Т.е. в CD режиме приоритет дается электродвигателю 140 во время поездки. В данном случае в CD режиме, когда педаль акселератора нажата глубоко для того, чтобы увеличить мощность, задействуется двигатель внутреннего сгорания 131 и расходуется топливо.
[40] В CS режиме осуществляется поддержка зарядки аккумуляторной батареи 113 в пределах заранее установленного диапазона с учетом эталонного значения. В частности, в CS режиме двигатель внутреннего сгорания 131 задействуется для рекуперационной работы электродвигателя 140, в случае необходимости, для поддержания зарядки аккумуляторной батареи 113. В данном случае в CS режиме, когда заряд аккумуляторной батареи 113 превышает эталонное значение, задействуется электродвигатель 140, а работа двигателя внутреннего сгорания 131 останавливается. В этом случае эталонное значение для CS режима, соответственно, устанавливается как значение заряда аккумуляторной батареи 113, когда происходит переключение режима с CD режима на CS режим, или значение заряда аккумуляторной батареи 113, которое необходимо для поддержания свойств аккумуляторной батареи 113. Это означает, что в CS режиме происходит поддержание заряда аккумуляторной батареи 113 путем расходования топлива. В CD режиме дается приоритет скорее расходованию заряда аккумуляторной батареи 113, чем расходованию топлива.
[41] Кроме того, в любом режиме, для того чтобы справиться с переменной транспортной нагрузкой, по меньшей мере, один двигатель внутреннего сгорания 131 или электродвигатель 140, может задействоваться по мере необходимости в соответствии с настоящим распределением (коэффициентом деления выходной мощности) приводного усилия для двигателя внутреннего сгорания 131 и электродвигателя 140, которое определяется гибридным контроллером 110.
[42] Блок 150 помощи при движении включает в себя блок 152 управления режимом, который управляет режимом движением транспортного средства 100 на основе плана движения, в котором один из режимов, CD режим или CS режим, назначается каждому соединению, включенному в маршрут. Когда транспортное средство 100 отклоняется от запланированного маршрута, блок 152 управления режимом принудительно переключает режим движения транспортного средства 100 в CD режим. Затем, когда транспортное средство 100 возвращается на запланированный маршрут после отклонения от маршрута, блок 152 управления режимом управляет режимом движения транспортного средства 100 в соответствии с режимом плана движения. Кроме того, когда навигационная система 120 перерассчитывает маршрут после отклонения транспортного средства 100 от запланированного маршрута, блок 152 управления режимом управляет режимом движения транспортного средства 100 в соответствии с режимом плана движения, который сформирован на основе перерассчитанного маршрута.
[43] Блок 150 помощи при движении также включает в себя устройство 153 отображения режима. Устройство 153 отображения режима выдает план движения, который служит в качестве вспомогательной информации при движении и формируется блоком 151 планирования режимов, на интерфейсы человек-машина 123 (далее, интерфейс 123) через бортовую сеть NW. Устройство 153 отображения режима выдает информацию для отображения изображения на интерфейс 123. Кроме или вместо информации в виде изображения устройство 153 отображения режима может также выдавать голосовые данные.
[44] Интерфейсы 123 включают в себя дисплей 125 с возможностью отображения на нем букв и изображений и контроллер дисплея 124, который управляет работой дисплея. Дисплей 125 включает в себя, например, монитор, индикатор на лобовом стекле, приборную панель и т.д. Интерфейсы 123 могут совместно использовать монитор или подобное с навигационной системой 120. Кроме того, интерфейс ЧМИ 123 могут выдавать голосовые данные, получаемые от блока 150 помощи при движении, через громкоговоритель.
[45] Далее приведено описание функционирования контроллера транспортного средства в соответствии с первым вариантом осуществления изобретения, которое, главным образом, реализуется блоком 150 помощи при движении.
Если установлено место назначения в навигационной системе 120 и выполнен расчет маршрута до места назначения, блок 150 помощи при движении получает информацию о маршруте от начальной точки до места назначения от навигационного контроллера 121.
[46] Когда блок 150 помощи при движении получает маршрут, блок 151 планирования режимов назначает один из режимов, CD режим или CS режим, для каждого соединения в полученном маршруте для того чтобы сформировать план движения. Блок 151 планирования режимов движения формирует план движения так, чтобы снизить количество выбросов или чтобы увеличить расстояние, преодолеваемое в режиме электромобиля. В целом, когда выбран CD режим, который дает приоритет движению транспортного средства в режиме электромобиля, снижение расхода топлива приводит к снижению количества выбросов. Однако расстояние, для преодоления которого может быть назначен CD режим, ограничивается в зависимости от заряда аккумуляторной батареи 113. Таким образом, план движения формируется так, чтобы CD режим назначался максимальному количеству зон маршрута, а CS режим назначался зоне, для которой невозможно назначение CD режима. В частности, блок 151 планирования режимов назначает CD режим для каждой зоны маршрута с относительно малой транспортной нагрузкой, а CS режим назначает для каждой зоны маршрута с относительно высокой транспортной нагрузкой. В данном случае степень транспортной нагрузки каждой зоны определяется из сравнительного отношения к другим зонам маршрута. Таким образом, транспортная нагрузка каждой зоны определяется путем сравнения транспортной нагрузки с другими зонами маршрута. В качестве альтернативы, в формировании плана движения зона с малой транспортной нагрузкой может включать в себя зону с низкой средней скоростью движения транспортного средства и зону, соответствующую движению в городе, а зона с высокой транспортной нагрузкой может включать в себя зону с высокой средней скоростью движения транспортного средства и зону, соответствующую движению по трассе. Кроме того, план движения может формироваться на основе другого известного условия, когда такое условие подходит для снижения выбросов или увеличения расстояния, преодолеваемого в режиме электромобиля.
[47] Как показано на фиг. 3, когда транспортное средство 100 начинает движение, блок 152 управления режимом определяет, движется ли транспортное средство 100 по запланированному маршруту или нет, и управляет режимом на основе результатов этого определения. В данном случае, когда транспортное средство 100 движется по запланированному маршруту, который указывается непрерывной двойной линией, блок 152 управления режимом управляет режимом транспортного средства 100 в соответствии с планом движения. В частности, блок 152 управления режимом контролирует зону от начальной точки S до точки А в CD режиме, зону от точки А до точки B в CS режиме, а зону от точки В до места назначения G в CD режиме.
[48] Процедуры управления, выполняемые блоком 152 управления режимом, описываются далее со ссылкой на фиг. 2.
При начале процесса, как показано на фиг. 2, блок 152 управления режимом 152 определяет, находится ли транспортное средство 100 на маршруте или нет (шаг S1). В частности, блок 152 управления режимом распознает текущее местоположение транспортного средства 100, например, на основе информации о местоположении, полученной от блока 101 определения местоположения, и определяет, находится ли текущее местоположение транспортного средства 100 на запланированном маршруте.
[49] Если определяется, что транспортное средство 100 движется по запланированному маршруту (непрерывная двойная линия на фиг. 3) (шаг S1 на фиг. 2: ДА), блок 152 управления режимом выбирает режим в соответствии с планом движения (шаг S11). В частности, блок 152 управления режимом управляет режимом транспортного средства 100 в соответствии с планом движения, который формируется по маршруту так, чтобы снизить количество выбросов. Затем блок 152 управления режимом определяет, совпадает ли текущее местоположение транспортного средства 100 с местом назначения G (шаг S12). В частности, блок управления режимом 152 определяет, прибыло ли транспортное средство 100 в место назначения G, и прекращает процесс, определив, что транспортное средство 100 прибыло в место назначения G. Если определено, что местоположение транспортного средства 100 не совпадает с местом назначения G (шаг S12 на фиг. 2: НЕТ), блок управления режимом 152 переходит к шагу S1 и продолжает процесс. Если определяется, что транспортное средство 100 находится в месте назначения G (шаг S12 на фиг. 2: ДА), блок управления режимом 152 прекращает процесс управления режимом.
[50] С другой стороны, если определяется, что транспортное средство 100 движется по незапланированному маршруту, т.е. транспортное средство 100 отклоняется от маршрута (S1 на фиг. 2: НЕТ), блок 152 управления режимом устанавливает режим движения транспортного средства 100 в CD режиме (шаг S2 на фиг. 2). В частности, как показано на фиг. 3, когда транспортное средство 100 отклоняется от маршрута в точке С и возвращается на маршрут в точке D, блок 152 управления режимом принудительно устанавливает CD режим для зоны от точки С до точки D, независимо от того, что CS режим запланирован для зоны от точки А до точки В. Таким образом, транспортное средство 100 движется в CD режиме на маршруте, отклоненном от маршрута (прерывистая двойная линия на фиг. 3). Это позволяет увеличить расход энергии от аккумуляторной батареи 113.
[51] Блок 152 управления режимом определяет, возвращается ли транспортное средство 100 на запланированный маршрут или навигационная система 120 перерассчитывает маршрут. Блок 152 управления режимом повторяет определение, как указано выше, до тех пор, пока транспортное средство 100 не вернется на маршрут или навигационная система 120 не выполнит перерасчет маршрута (шаг S3 на фиг. 2).
[52] В соответствии с вышеописаннным в данном случае транспортное средство 100 возвращается на маршрут в точке D. Таким образом, блок 152 управления маршрутом определяет, что транспортное средство 100 возвращается на запланированный маршрут (шаг S3 на фиг. 2: ДА) и переходит к шагу S1. В частности, когда транспортное средство 100 возвращается на запланированный маршрут в точке D, блок 152 управления режимом устанавливает режим движения транспортного средства 100 в CS режиме, который назначен зоне от точки А до точки В, включая точку D.
[53] По истечении фиксированного периода времени (например, 1 минута) после того как транспортное средство 100 отклоняется от маршрута, навигационная система 120 перерассчитывает маршрут, а блок 151 планирования режимов формирует новый план движения на перерассчитанном маршруте. Таким образом, при определении факта перерасчета маршрута в точке D, как показано на фиг. 3, блок 152 управления режимом управляет режимом движения транспортного средства 100 от точки D на основе нового сформированного плана движения.
[54] В соответствии с вышеописаннным, первый вариант осуществления характеризуется преимуществами, описываемыми далее.
(1) Когда транспортное средство 100 отклоняется от запланированного маршрута, режим движения транспортного средства 100 принудительно устанавливается в CD режиме. Это увеличивает расход энергии от аккумуляторной батареи 113 и позволяет избежать ситуации, в которой неиспользуемая энергия остается в аккумуляторной батарее 113 из-за отклонения транспортного средства 100 от запланированного маршрута.
[55] Кроме того, управление, выполняемое в соответствии с первым вариантом осуществления, эффективно, когда контроль движения выполняется в местоположении без информации о маршруте (например, см. фиг. 4 и 5), т.е. в местоположении, для которого не может быть сформирован план движения. В данном случае "местоположение, для которого не может быть сформирован план движения" соответствует местоположению, для которого информация, необходимая для формирования плана движения, такая как информация о транспортной нагрузке, не может быть получена. Такое местоположение обычно не регистрируется в качестве дорожного пути в базе данных картографической информации 122 навигационной системы 120. На фиг. 4 и 5 дорога, которая, вероятно, будет выбрана на маршруте транспортного средства 100, для наглядности затенена.
[56] На фиг. 4 показано транспортное средство 100, которое находится на большой парковочной зоне Ρ крупного торгового центра или подобной. Парковочная зона Ρ включает в себя места для парковки и проезды, которые не зарегистрированы в качестве дорожных путей в базе данных картографической информации 122 навигационной системы 120. Таким образом, путь транспортного средства 100 от начальной точки S до дороги R, которая зарегистрирована в базе данных картографической информации 122 навигационной системы 120, т.е. имеет информацию о дороге, является отклонением от маршрута.
[57] В этом случае, пока транспортное средство 100 находится в парковочной зоне Ρ крупного торгового центра или подобной, блок 152 управления режимом определяет, что транспортное средство 100 не находится на запланированном маршруте (шаг S1 на фиг. 2: НЕТ) и принудительно устанавливает режим движения транспортного средства 100 в CS режиме. Когда транспортное средство 100 достигает дороги R, имеющей информацию о дороге, возможно формирование плана движения.
[58] На фиг. 5 показано транспортное средство 100, которое находится на дороге в границах частной собственности или на узкой дороге. Дороги в границах частной собственности и узкие дороги часто не регистрируются в качестве дорожных путей в базе данных картографической информации 122 навигационной системы 120. Незарегистрированная дорога включает в себя дорогу X, для которой нет информации о дороге. Таким образом, путь транспортного средства 100 от начальной точки S до дороги R, которая зарегистрирована в базе данных картографической информации 122 навигационной системы 120, имеющей информацию о дороге, является отклонением от маршрута.
[59] Пока транспортное средство 100 находится на дороге в границах частной собственности или на узкой дороге, блок 152 управления режимом также определяет, что транспортное средство 100 не находится на запланированном маршруте и принудительно устанавливает режим движения транспортного средства 100 в CD режиме. В соответствии с вышеописаннным, когда транспортное средство 100 достигает дороги R, с информацией о дороге, возможно формирование плана движения.
[60] Кроме того, транспортное средство 100 может двигаться по местности, для которой отсутствует картографическая информация, например, по берегу моря или реки. В таком случае блок 152 управления режимом также определяет, что транспортное средство 100 не находится на запланированном маршруте и принудительно устанавливает режим движения транспортного средства 100 в CD режиме.
[61] Второй вариант осуществления изобретения
Второй вариант осуществления контроллера транспортного средства описывается со ссылками на фиг. 6-9.
Контроллер транспортного средства в соответствии со вторым 2 вариантом осуществления отличается от первого варианта осуществления тем, что, когда транспортное средство 100 отклоняется от запланированного маршрута и затем транспортное средство возвращается на маршрут или выполняется перерасчет маршрута, режим движения транспортного средства 100 сохраняется в CD режиме в течение заранее установленного периода времени. Описание сосредоточено на отличиях от первого варианта осуществления.
[62] Как показано на фиг. 6, блок 152 управления режимом в соответствии со вторым вариантом осуществления выполняет процесс такой же, как и шаги S1-S3 первого варианта осуществления. Затем блок 152 управления режимом рассчитывает время от момента, когда было определено, что транспортное средство 100 возвращается на запланированный маршрут, или когда навигационная система 120 перерассчитывает маршрут (шаг S4).
[63] В данном случае транспортное средство 100 может отклоняться от запланированного маршрута, возвратиться в зону, для которой назначен CS режим (CS зона) и снова отклониться от маршрута. В таком случае, если транспортное средство 100 управляется в CD режиме, только пока транспортное средство 100 отклоняется от маршрута, режим может переключиться с CD режима на CS режим, а затем снова в CD режим через короткий интервал времени, то может произойти так называемое "виляние". В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута и затем снова возвращается на маршрут, блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме в течение заранее установленного периода времени.
[64] Кроме того, транспортное средство 100 может отклониться от запланированного маршрута, двигаться в CS зоне перерассчитанного маршрута, а затем отклониться от перерассчитанного маршрута. В таком случае, если транспортное средство 100 управляется в CD режиме, только пока транспортное средство 100 отклоняется от маршрута, то может произойти так называемое "виляние", при котором режим переключается с CD режима на CS режим, а затем снова в CD режим через короткий интервал времени. В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута и затем происходит перерасчет маршрута, блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме в течение заранее установленного периода времени.
[65] В частности, в соответствии с фиг. 6 и 7, при определении факта, что транспортное средство 100 отклоняется от запланированного маршрута в точке С, как показано на фиг. 7, и затем снова возвращается на маршрут в точке D, как показано на фиг. 7 (шаг S3 на фиг. 6: ДА), блок 152 управления режимом рассчитывает истекший период времени с момента, когда транспортное средство 100 возвращается на маршрут в точке D (шаг S4). Затем блок 152 управления режимом определяет, превышает ли этот рассчитанный истекший период времени или он равен заранее установленному периоду времени (шаг S5). Если определяется, что этот рассчитанный истекший период времени меньше заранее установленного периода времени от точки D до точки В, показанных на фиг. 7 (шаг S5: НЕТ), то блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме в течение заранее установленного периода времени после возвращения транспортного средства 100 на маршрут. Говоря иными словами, когда транспортное средство 100 возвращается на запланированный маршрут в точке D, блок 152 управления режимом принудительно управляет транспортным средством 100 в CD режиме, независимо от того, что CS режим запланирован для зоны между точкой D и точкой В. В результате режим движения транспортного средства 100 сохраняется в CD режиме на протяжении зоны от точки С до точки В, показанных на фиг. 7.
[66] С другой стороны, если определяется, что этот рассчитанный истекший период времени равен заранее установленному периоду времени или превышает его, после того как транспортное средство 100 проходит точку В, показанную на фиг. 7 (шаг S5: ДА), то блок 152 управления режимом переходит к шагу S1. Таким образом, когда заранее установленный период времени истекает после возвращения транспортного средства на маршрут, режим движения транспортного средства 100 управляется на основе плана движения. Эти процессы ограничивают "виляние", как указано выше.
[67] Кроме того, как показано на фиг. 8, когда транспортное средство 100 движется в зоне между точкой А и точкой В, и отклоняется от маршрута в точке С, режим движения транспортного средства 100 устанавливается в CD режиме. Затем, как показано на фиг. 9, когда истекает фиксированный период времени в точке Е, после того как транспортное средство 100 отклоняется от маршрута, навигационная система 120 перерассчитывает маршрут от точки Ε до места назначения G, а блок 151 планирования режимов формирует план движения на перерассчитанном маршруте. Таким образом, если определяется, что маршрут перерассчитан в точке Е, блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме в течение заранее установленного периода времени.
[68] Если определяется, что навигационная система 120 перерассчитывает маршрут в точке Е, как показано на фиг. 9 (шаг S3 на фиг. 6: ДА), блок 152 управления режимом рассчитывает период времени, истекший от точки Ε (шаг S4). Затем блок управления режимом 152 определяет, превышает ли этот рассчитанный истекший период времени заранее установленный период времени или равен ему (шаг S5). Если определяется, что этот рассчитанный истекший период времени после перерасчета маршрута меньше заранее установленного периода времени от точки Ε до точки F, показанных на фиг. 9 (шаг S5: НЕТ), блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме в течение этого заранее установленного периода времени после перерасчета маршрута.
[69] Если определяется, что этот рассчитанный истекший период времени превышает заранее установленный период времени или равен ему в точке F, показанной на фиг. 9 (шаг S5: ДА), то блок 152 управления режимом переходит к шагу S1. В частности, в этом случае, когда транспортное средство 100 возвращается на запланированный маршрут в точке F, то блок 152 управления режимом управляет транспортным средством 100 в CS режиме, который повторно назначается для зоны между точкой F и точкой В, включая точку D. Даже в этом случае CD режим принудительно сохраняется в течение заранее установленного периода времени до тех пор, пока режим не будет выбран на основе нового сформированного плана движения. Это ограничивает "виляние", как указано выше.
[70] Таким образом, блок 152 управления режимом возвращается в нормальный режим управления, в котором выбираются режимы, когда истекает фиксированный период времени после возвращения или перерасчета маршрута. Это ограничивает возникновение "виляния" как указано выше, даже когда транспортное средство 100 возвращается на запланированный или перепланированный маршрут, а затем сразу же отклоняется от маршрута.
[71] Второй вариант осуществления изобретения характеризуется преимуществами, описываемыми далее, в дополнение к преимуществу (1) первого варианта осуществления.
(2) Когда транспортное средство 100 отклоняется от запланированного маршрута и движется в CD режиме, транспортное средство 100 продолжает движение в CD режиме до тех пор, пока не истечет заранее установленный период времени, независимо от режима, назначенного для зоны маршрута, когда транспортное средство 100 возвращается, и даже когда транспортное средство 100 возвращается на маршрут, а затем сразу же снова отклоняется от маршрута. Это ограничивает возникновение так называемого "виляния", когда часто повторяется переключение между CD режимом и CS режимом, независимо от содержания плана движения маршрута, на который возвращается транспортное средство 100 и когда происходит повторяющееся отклонение от маршрута.
[72] (3) Когда транспортное средство 100 отклоняется от запланированного маршрута, транспортное средство 100 движется в CD режиме. Затем, после истечения фиксированного периода времени, выполняется перерасчет для формирования нового плана движения. Независимо от содержания нового плана движения, и даже когда транспортное средство 100 сразу же снова отклоняется от перерассчитанного маршрута, транспортное средство 100 продолжает движение в CD режиме до тех пор, пока не истечет заранее установленный период времени. Таким образом, возникновение так называемого "виляния", когда часто повторяется переключение между CD режимом и CS режимом, может быть ограничено независимо от содержания плана движения маршрута и повторяющегося отклонения от маршрута.
[73] Третий вариант осуществления изобретения
Третий вариант осуществления контроллера транспортного средства описывается со ссылками на фиг. 10-12. Контроллер транспортного средства в соответствии с третьим вариантом осуществления отличается от первого варианта осуществления тем, что, когда транспортное средство 100 отклоняется от запланированного маршрута и затем транспортное средство возвращается на маршрут или выполняется перерасчет маршрута, режим движения транспортного средства 100 сохраняется в CD режиме в течение заранее установленного периода времени. Описание сосредоточено на отличиях от первого варианта осуществления.
[74] Как показано на фиг. 10, блок 152 управления режимом в соответствии с третьим вариантом осуществления выполняет процесс такой же, как и шаги S1-S3 первого варианта осуществления. После определения того, что транспортное средство 100 возвращается на запланированный маршрут или навигационная система 120 перерассчитывает маршрут, блок 152 управления режимом устанавливает CD режим в первой зоне после возвращения или перерасчета (шаг S6).
[75] В данном случае транспортное средство 100 может отклониться от маршрута при движении в CS зоне, а затем вернуться в CS зону. В таком случае, если транспортное средство 100 управляется в CD режиме только, пока транспортное средство 100 отклоняется от маршрута, может произойти так называемое "виляние", при котором режим переключается с CS режима на CD режим, а затем снова в CS режим через короткий интервал времени. В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута и затем снова возвращается на маршрут, блок 152 управления режимом сохраняет CD режим в зоне, по которой транспортное средство 100 движется вначале после возврата.
[76] Кроме того, когда транспортное средство 100 отклоняется от маршрута в CS зоне и происходит перерасчет маршрута, для первой зоны перерассчитанного маршрута может быть назначен CS режим. В таком случае, если транспортное средство 100 управляется в CD режиме только, пока транспортное средство 100 отклоняется от маршрута, то также произошло бы так называемое "виляние", при котором режим переключается с CS режима на CD режим, а затем снова в CS режиме через короткий интервал времени. В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута и затем происходит перерасчет маршрута, блок 152 управления режимом сохраняет CD режим в зоне маршрута, по которой транспортное средство 100 движется вначале после перерасчета.
[77] В частности, в соответствии с фиг. 10, при определении факта, что транспортное средство 100 отклоняется от запланированного маршрута в точке С, как показано на фиг. 11, и возвращается на маршрут в точке D, как показано на фиг. 11 (шаг S3 на фиг. 10: ДА), блок управления режимом 152 сохраняет CD режим в зоне между точкой D и точкой В, которая служит в качестве первой зоны, включающей точку D, в которой транспортное средство 100 движется после возвращения (шаг S6 на фиг. 10). В результате, режим движения транспортного средства 100 сохраняется в CD режиме на протяжении зоны от точки С, в которой транспортное средство 100 отклоняется от маршрута, до точки В.
[78] Таким образом, в настоящем варианте осуществления, когда транспортное средство 100 отклоняется от маршрута и затем снова возвращается на маршрут, CD режим сохраняется в первой зоне после возвращения. Затем, режим движения транспортного средства 100 управляется на основе плана движения от следующей зоны. Это ограничивает "виляние", как указано выше.
[79] Кроме того, как показано на фиг. 12, когда транспортное средство 100 движется в зоне между точкой А и точкой В, и отклоняется от маршрута в точке С, режим движения транспортного средства 100 устанавливается в CD режиме. Затем, когда истекает фиксированный период времени в точке Е, в которой транспортное средство 100 отклоняется от маршрута, навигационная система 120 перерассчитывает маршрут от точки Ε до места назначения G, а блок 151 планирования режимов формирует план движения на перерассчитанном маршруте. Таким образом, если определяется, что маршрут перерассчитывается в точке Е, блок 152 управления режимом сохраняет CD режим в зоне между точкой Ε и точкой D, которая служит в качестве зоны, включающей точку Е, через которую транспортное средство 100 движется вначале после перерасчета.
[80] Если определяется, что навигационная система 120 перерассчитывает маршрут в точке Е, как показано на фиг. 12 (шаг S3 на фиг. 10: ДА), блок 152 управления режимом сохраняет CD режим в зоне между точкой Ε и точкой D, которая служит в качестве зоны, включающей точку Е, через которую транспортное средство 100 движется вначале после перерасчета (шаг S6 на фиг. 10). В результате, режим движения транспортного средства 100 сохраняется в CD режиме на протяжении зоны от точки С, в которой транспортное средство 100 отклоняется от маршрута, до точки D.
[81] В данном случае, блок 152 управления режимом управляет режимом движения транспортного средства 100 на основе нового сформированного плана движения со следующей зоны нового сформированного плана движения. Это ограничивает "виляние", как указано выше.
[82] Третий вариант осуществления характеризуется преимуществами, описываемыми далее, в дополнение к преимуществу (1) первого варианта осуществления.
(4) Когда транспортное средство 100 отклоняется от запланированного маршрута и движется в CD режиме, транспортное средство 100 может вернуться в зону маршрута, для которой назначен CS режим. Даже в этом случае транспортное средство 100 продолжает движение по зоне в CD режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда транспортное средство 100 возвращается в зону маршрута, для которой назначен CS режим, но остаток пути в этой зоне короткий, а следующей зоне назначен CD режим.
[83] (5) Когда транспортное средство 100 отклоняется от запланированного маршрута и движется в CD режиме, маршрут перерассчитывается для формирования нового плана движения после истечения фиксированного периода времени. Даже, когда для первой зоны перерассчитанного маршрута назначается CS режим, транспортное средство 100 продолжает движение в первой зоне перерассчитанного маршрута в CD режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда для первой зоны перерассчитанного маршрута назначается CS режим, но остаток пути в этой зоне короткий, а следующей зоне назначается CD режим.
[84] Четвертый вариант осуществления изобретения
Четвертый вариант осуществления контроллера транспортного средства описывается со ссылками на фиг. 13-15. Контроллер транспортного средства в соответствии с четвертым вариантом осуществления отличается от первого варианта осуществления тем, что, когда транспортное средство 100 отклоняется от запланированного маршрута и затем транспортное средство 100 возвращается на маршрут или происходит перерасчет маршрута, то, если первая зона после возвращения или перерасчета является CS зоной, а расстояние до следующей CD зоны меньше или равно фиксированному расстоянию, режим движения транспортного средства 100 сохраняется в CD режиме до следующей CD зоны. Описание сосредоточено на отличиях от первого варианта осуществления.
[85] Как показано на фиг. 13, блок 152 управления режимом в соответствии с четвертым вариантом осуществления выполняет процесс такой же, как и шаги S1-S3 первого варианта осуществления. Если определяется, что транспортное средство 100 возвращается на запланированный маршрут или навигационная система 120 перерассчитывает маршрут, то, если первая зона после возвращения или перерасчета - это CS зона (шаг S7: ДА), блок 152 управления режимом рассчитывает оставшееся расстояние L до следующей CD зоны после возвращения или перерасчета (шаг S8).
[86] В данном случае, когда транспортное средство 100 отклоняется от запланированного маршрута и возвращается в CS зону маршрута, оставшееся расстояние до следующей CD зоны может оказаться коротким. В таком случае, если транспортное средство 100 управляется в CD режиме только, пока транспортное средство 100 отклоняется от маршрута, то произошло бы так называемое "виляние", при котором режим переключается с CD режима на CS режим, а затем снова в CD режим через короткий интервал времени. В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута, а затем снова возвращается на маршрут, то, если первая зона маршрута после возвращения - это CS зона, а оставшееся расстояние L до следующей CD зоны меньше или равно фиксированному расстоянию W, блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме до следующей CD зоны.
[87] Кроме того, когда транспортное средство 100 отклоняется от запланированного маршрута и происходит перерасчет маршрута, первой зоной перерассчитанного маршрута может оказаться CS зона, а оставшееся расстояние L до следующей CD зоны может оказаться коротким. Также, в таком случае, если транспортное средство 100 управляется в CD режиме только, пока транспортное средство 100 отклоняется от маршрута, то может произойти так называемое "виляние", при котором режим переключается с CD режима на CS режим, а затем снова в CD режим через короткий интервал времени. В связи с этим, когда транспортное средство 100 отклоняется от запланированного маршрута, а затем выполняется перерасчет маршрута, то, если первая зона перерассчитанного маршрута - это CS зона, а оставшееся расстояние L до следующей CD зоны меньше или равно фиксированному расстоянию W, блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме до следующей CD зоны.
[88] В частности, в соответствии с фиг. 13, при определении факта, что транспортное средство 100 отклоняется от запланированного маршрута в точке С, как показано на фиг. 14, и возвращается на маршрут в точке D, (шаг S3 на фиг. 13: ДА), и, если определяется, что зона между точкой D и точкой В, которая служит в качестве первой зоны, включающей точку D, после возвращения - CS зона (шаг S7 на фиг 13: ДА), то блок 152 управления режимом рассчитывает оставшееся расстояние L1 до зоны между точкой В и местом назначения G, которая является следующей CD зоной после CS зоны (шаг S8). Затем, блок 152 управления режимом определяет, является ли рассчитанное оставшееся расстояние L1 меньшим или равным фиксированному расстоянию W (шаг S9). Если определяется, что оставшееся расстояние L1, соответствующее расстоянию от точки D до точки В на фиг. 14, меньше или равно фиксированному расстоянию W (L1<W) (шаг S9: ДА), то блок 152 управления режимом устанавливает режим движения транспортного средства 100 в CD режим с точки D, в которой транспортного средства 100 возвращается, до точки В, в которой начинается следующая CD зона (шаг S10). Следовательно, режим движения транспортного средства 100 сохраняется в CD режиме на протяжении зоны от точки С до точки В, как показано на фиг. 14.
[89] Таким образом, в настоящем варианте осуществления, когда транспортное средство 100 отклоняется от маршрута и возвращается на маршрут, CD режим сохраняется до точки В, в которой начинается следующая CD зона. Затем, режим транспортного средства 100 управляется на основе плана движения от следующей зоны. Это позволяет избежать "виляния", как указано выше.
[90] Если определяется, что оставшееся расстояние L, соответствующее расстоянию до следующей CD зоны, превышает фиксированное расстояние W (L>W) (шаг S9: НЕТ), то блок 152 управления режимом управляет режимом движения транспортного средства 100 в первоначально назначенном CS режиме. В данном случае, расстояние до местоположения, в котором режим в следующий раз переключится в CD режим, превышает фиксированное расстояние W. Таким образом, можно избежать "виляния", как указано выше, даже когда режим выбирается в соответствии с планом движения маршрута, на который возвращается транспортное средство 100.
[91] Кроме того, как показано на фиг. 15, когда транспортное средство 100 движется в зоне от точки А до точки В, и отклоняется от маршрута в точке С, режим движения транспортного средства 100 устанавливается в CD режиме. Затем, когда истекает фиксированный период времени в точке Е, в которой транспортное средство 100 отклоняется от маршрута, навигационная система 120 перерассчитывает маршрут от точки Ε до места назначения G, а блок 151 планирования режимов формирует план движения на перерассчитанном маршруте.
[92] Если определяется, что навигационная система 120 перерассчитывает маршрут в точке Е, как показано на фиг. 15 (шаг S3 на фиг. 13: ДА), и, если определяется, что зона между точкой Ε и точкой D, которая служит в качестве первой зоны, включающей точку Е, после перерасчета - CS зона (шаг S7 на фиг 13: ДА), то блок 152 управления режимом рассчитывает оставшееся расстояние L2 до зоны от точки В до места назначения G, соответствующей следующей CD зоне после CS зоны (шаг S8). Затем, блок 152 управления режимом определяет, является ли рассчитанное оставшееся расстояние L2 меньшим или равным фиксированному расстоянию (шаг S9). Если определяется, что оставшееся расстояние L2, соответствующее расстоянию от точки Ε до точки В на фиг. 15, превышает фиксированное расстояние W (L2>W) (шаг S9: НЕТ), блок управления режимом 152 управляет транспортным средством 100 в CS режиме, который повторно назначается для зоны между точкой Ε и точкой В. В данном случае, расстояние, которое необходимо преодолеть, до местоположения, в котором режим в следующий раз переключится в CD режим, превышает фиксированное расстояние W. Таким образом, можно избежать "виляния", как указано выше, даже когда режим выбирается в соответствии с новым сформированным планом движения.
[93] Если определяется, что оставшееся расстояние L, соответствующее расстоянию до следующей Зоны режима разряжения, меньше или равно фиксированному расстоянию W (L≤W) (шаг S9: ДА), блок 152 управления режимом сохраняет режим движения транспортного средства 100 в CD режиме, независимо от того, что CS режим назначен для первой зоны после перерасчета.
[94] Четвертый вариант осуществления характеризуется преимуществами, описываемыми далее, в дополнение к преимуществу (1) первого варианта осуществления.
(6) Когда транспортное средство 100 отклоняется от запланированного маршрута и движется в CD режиме, транспортное средство 100 может вернуться в CS зону маршрута. В данном случае, если расстояние до CD зоны, которая расположена после CS зоны, меньше или равно фиксированному расстоянию, транспортное средство 100 продолжает движение в CD режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда расстояние до зоны, для которой назначается CD режим и которая расположена после зоны, в которую возвращается транспортное средство 100, меньше фиксированного расстояния.
[95] (7) Когда транспортное средство 100 отклоняется от запланированного маршрута и движется в CD режиме, маршрут перерассчитывается для формирования нового плана движения после истечения фиксированного периода времени. Даже, когда первая зона перерассчитанного маршрута - CS зона, то, если расстояние до CD зоны, которая расположена после этой CS зоны, меньше или равно фиксированному расстоянию, транспортное средство 100 продолжает движение в CD режиме. Это позволяет избежать "виляния", вызванного переключением режимов, которое возникает, когда расстояние в этой CD зоне, которая расположена после зоны, включающей первую зону нового сформированного плана движения, меньше фиксированного расстояния.
[96] Другие варианты осуществления изобретения
Для специалистов в данной области техники очевидно, что настоящее раскрытие изобретения может быть осуществлено во множестве других конкретных форм в пределах объема настоящего раскрытия изобретения. В частности, следует понимать, что настоящее раскрытие изобретения может быть осуществлено в следующих формах.
Во втором варианте осуществления, на шаге S4 на фиг. 6, блок 152 управления режимом рассчитывает время, истекшее с момента возвращения или перерасчета. На шаге S5 на фиг. 6 блок 152 управления режимом определяет, превышает ли этот период времени заранее установленный период времени или он равен ему. Вместо этого, как показано на фиг. 16, блок 152 управления режимом может рассчитывать пройденное расстояние, когда транспортное средство 100 возвращается на маршрут или происходит перерасчет маршрута, в соответствии с шагом S14, и определять, превышает ли это расстояние заранее установленное расстояние или оно равно ему, в соответствии с шагом S15.
[97] В вариантах осуществления 1-4, на шаге S3 блок-схем на фиг. 2, 6, 10, 13 используется логическое разделение, для цели упрощения, для обработки двух различных определений, включая определение факта отклонения транспортного средства 100 от маршрута и возврата на тот же самый маршрут, и факта перерасчета для формирования нового плана движения после истечения фиксированного периода времени (например, 1 минута) после того как транспортное средство 100 отклоняется от маршрута. Вместо этого в каждом варианте осуществления эти два определения могут обрабатываться отдельно. В данном случае, например, транспортное средство может управляться способом, который объединяет процесс для определения, когда транспортное средство 100 отклоняется от маршрута и возвращается на тот же самый маршрут, и процесс для определения, когда происходит перерасчет маршрута после истечения фиксированного периода времени после того как транспортное средство 100 отклоняется от маршрута.
[98] В каждом варианте осуществления изобретения, когда транспортное средство 100 отклоняется от маршрута определенное количество раз, режим движения транспортного средства 100 может поддерживаться в CD режиме, а формирование плана движения может прерываться. Например, как показано на фиг. 17, процесс, используемый для определения того, отклоняется ли транспортное средство 100 от маршрута предустановленное количество раз или более, добавляется между шагом S2 и шагом S3 каждого варианта осуществления. В частности, при определении того, что транспортное средство 100 отклоняется от маршрута заранее установленное количество раз или более (шаг S21: ДА), блок 152 управления режимом заставляет блок 151 планирования режима прекратить формирование плана движения, при этом сохраняя CD режим (шаг S22). В качестве альтернативы, когда перерасчет маршрута выполняется заранее установленное количество раз или более, режим движения транспортного средства 100 может поддерживаться в CD режиме, а формирование плана движения может прерываться. Как показано на фиг. 18, когда перерасчет маршрута повторяется заранее установленное количество раз или более (шаг S23: ДА), формирование плана движения прерывается, при этом сохраняется CD режим транспортного средства 100 (шаг S22). В любом случае, приоритет дается CD режиму. Таким образом, действия направляются на то, чтобы избежать ситуации, когда неиспользованная энергия остается в аккумуляторной батарее 113, даже если не сформирован план движения.
[99] В каждом варианте осуществления, блок 152 управления режимом может обеспечивать взаимно-однозначное соответствие для режима и движения так, чтобы транспортное средство 100 передвигалось в режиме электромобиля при управлении в CD режиме, и передвигалось в режиме гибридного транспортного средства при управлении в CS режиме.
[100] В вариантах осуществления, указанных выше, бортовая сеть NW показана как сеть CAN. Вместо этого может использоваться другая конфигурация бортовой сети NW, например, Ethernet (зарегистрированный товарный знак), FlexRay (зарегистрированный товарный знак), или IEE1394 FireWire (зарегистрированный товарный знак)), при условии, что сеть соединяет и обеспечивает связь с электронным блоком управления и т.д. В качестве альтернативы бортовая сеть NW может включать в себя сеть CAN и представлять собой сочетание сетей.
[101] В вариантах осуществления, указанных выше, блок 101 определения местоположения соединяется с навигационным контроллером 121 через бортовую сеть NW. Вместо этого блок 101 определения местонахождения может напрямую подключаться к навигационному контроллеру 121.
[102] В вариантах осуществления, указанных выше, навигационная система 120 и блок 150 помощи при движении сконфигурированы раздельно. Вместо этого навигационная система 120 и блок помощи при движении могут объединяться в одном устройстве.
[103] В вариантах осуществления, указанных выше, гибридный контроллер 110 и блок 150 помощи при движении скомпонованы в одном устройстве. Вместо этого гибридный контроллер и блок помощи при движении могут быть скомпонованы как разные устройства.
[104] В вариантах осуществления, указанных выше, устройства, такие как навигационная система 120 и дисплей 125 интегрированы с транспортным средством 100. Вместо этого функции устройств, включая навигационную систему и дисплей, могут быть полностью или частично реализованы мобильным устройством обработки информации, таким как мобильный телефон или смартфон, при условии, что такие устройства соединяются друг с другом способом, обеспечивающим соединение между ними.
[105] В вариантах осуществления, указанных выше, блок 150 помощи при движении, навигационная система 120, база данных картографической информации 122 и т.д. устанавливаются на транспортном средстве 100. Вместо этого внешнее устройство обработки информации или мобильное устройство обработки информации может частично включать в себя функции блока помощи при движении, навигационной системы, базы данных картографической информации и т.д. Пример внешнего устройства обработки информации - центр обработки информации. Примеры мобильных устройств обработки информации - мобильный телефон или смартфон. Внешнее устройство обработки информации может обмениваться информацией, используя беспроводной канал связи. Мобильное устройство обработки информации может подключаться к бортовой сети или через беспроводной канал связи ближнего радиуса действия, или обмениваться информацией через беспроводной канал связи.
[106] В вариантах осуществления изобретения, указанных выше, блок 150 помощи при движении назначает режим движения. Вместо этого навигационный контроллер или подобный блок может назначать режим движения.
[107] В вариантах осуществления изобретения, указанных выше, режим движения назначается, главным образом, когда начальная точка совпадает с текущим местоположением транспортного средства 100. Однако при назначении режима движения начальная точка может находиться в любом местоположении транспортного средства 100, которое движется к месту назначения. Кроме того, режим движения может соответственно назначаться независимо от местоположения транспортного средства 100.
[108] В вариантах осуществления изобретения, указанных выше, транспортное средство 100 показано как транспортное средство типа гибридный автомобиль с подзарядкой от электросети. Вместо этого транспортное средство 100 может быть гибридным транспортным средством с увеличенным количеством аккумулированной энергии. План движения может применяться для снижения количества аккумулированной энергии до определенного значения.
[109] Настоящие примеры и варианты осуществления рассматриваются в качестве иллюстративных, но не ограничительных, а настоящее раскрытие изобретения не ограничивается сведениями, содержащимися в нем, но может быть модифицировано в пределах объема и эквивалентов прилагаемой формулы изобретения.





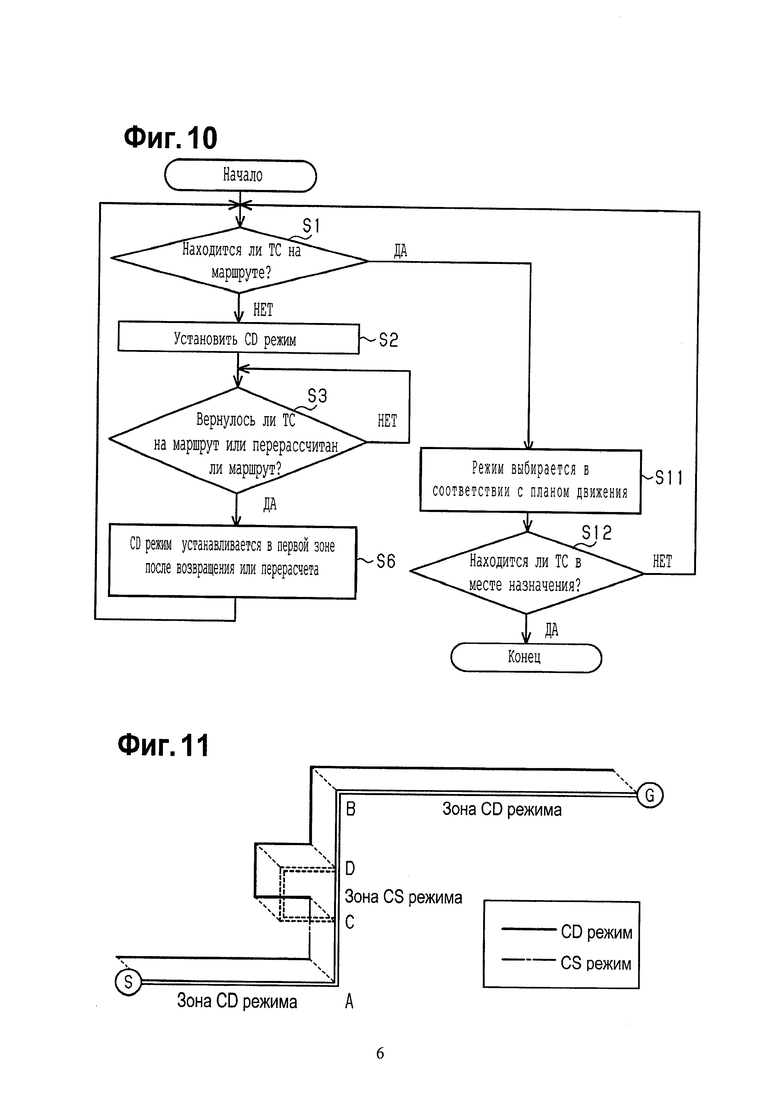
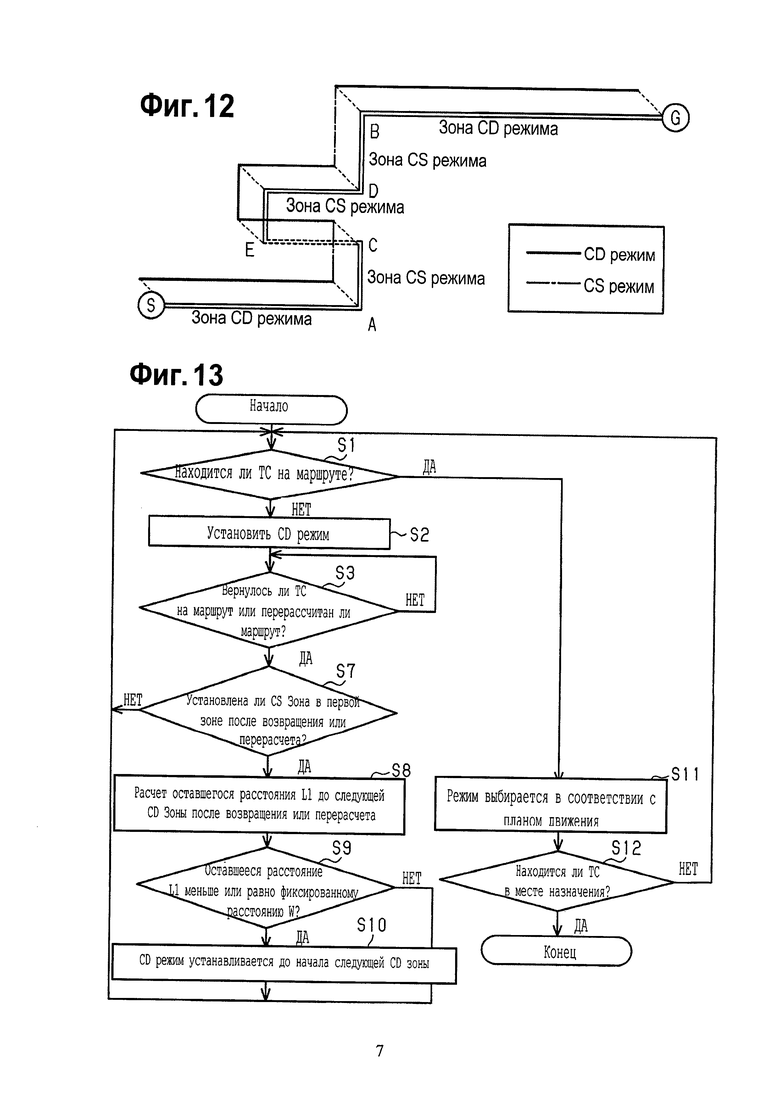
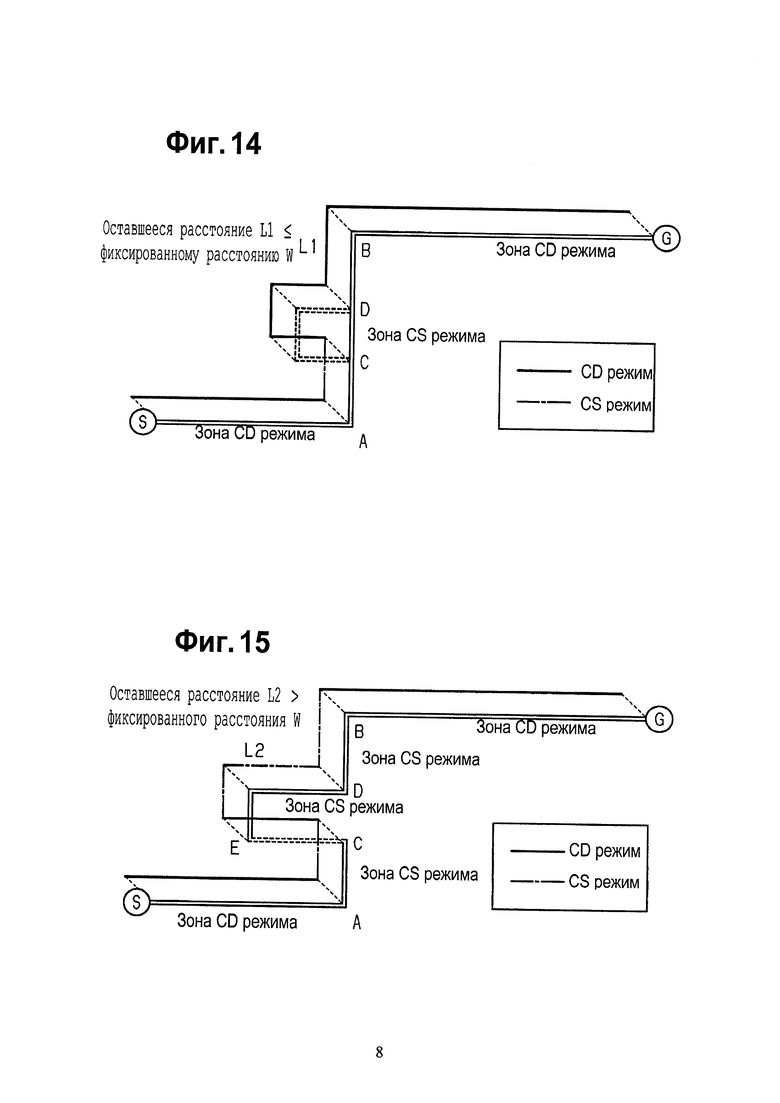
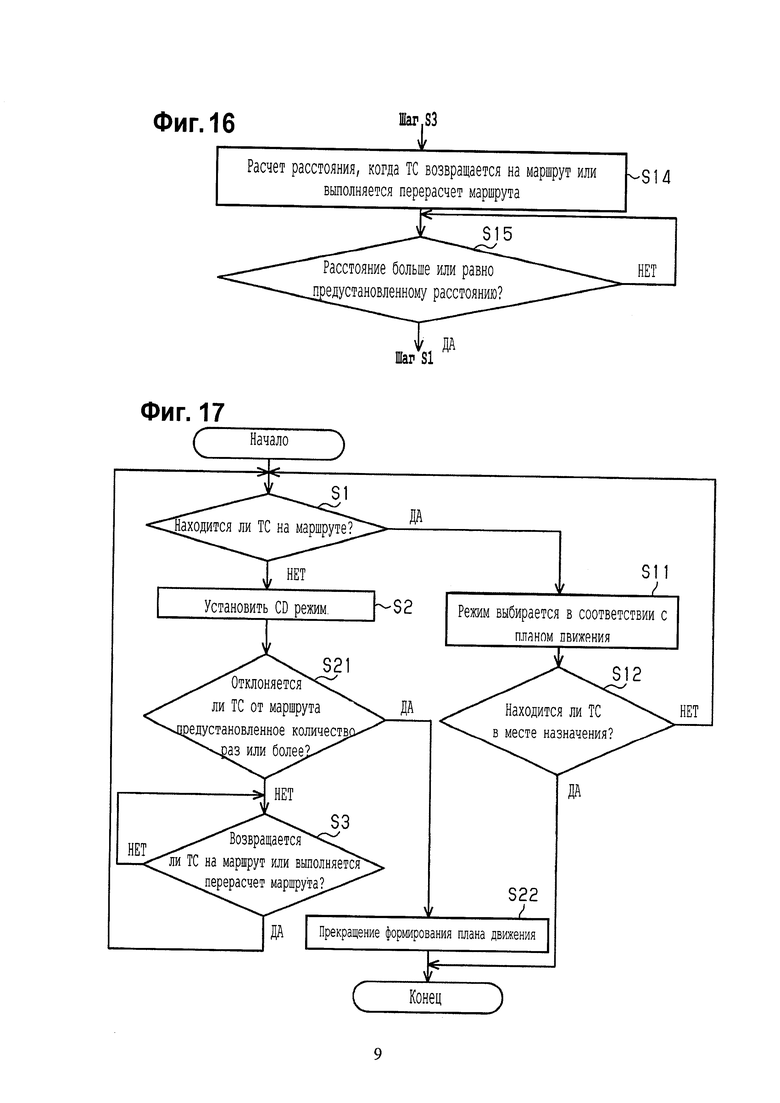

Изобретение относится к устройствам управления транспортным средством. Контроллер транспортного средства управляет движением транспортного средства, выбирая один из двух режимов движения, и обеспечивает движение в выбранном режиме. Транспортное средство расходует энергию батареи при движении в первом режиме и поддерживает количество энергии батареи при движении во втором режиме. Маршрут движения транспортного средства от начальной точки до места назначения включает в себя различные зоны. Контроллер транспортного средства содержит блок планирования движения и блок управления, выполненный с возможностью управления движением транспортного средства на основе сформированного плана движения. Блок планирования движения выполнен с возможностью формирования плана движения, назначает один из двух режимов для каждой зоны, включенной в маршрут. Блок управления активирует первый режим, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения, и затем продолжает движение по новому пути. Достигается повышение экономичности движения транспортного средства. 4 н.и 7 з.п. ф-лы, 18 ил.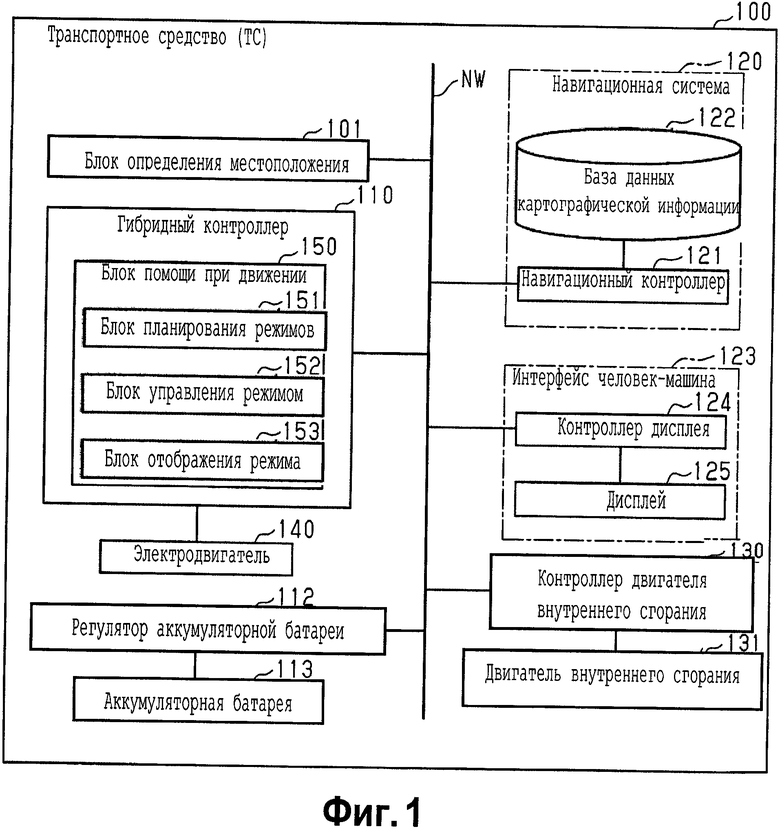
1. Контроллер транспортного средства, который выполняет управление движением, на транспортном средстве, характеризующийся тем, что транспортное средство выбирает один из режимов, первый режим или второй режим, в качестве режима движения и движется в этом режиме, при этом транспортное средство расходует энергию аккумуляторной батареи при движении в первом режиме и поддерживает количество аккумулированной энергии аккумуляторной батареи при движении во втором режиме, и транспортное средство движется по маршруту от начальной точки до места назначения, который включает в себя различные зоны, контроллер транспортного средства включает в себя следующее:
блок планирования движения, выполненный с возможностью формирования плана движения, который назначает один из режимов, первый режим или второй режим, для каждой зоны, включенной в маршрут; и
блок управления, выполненный с возможностью управления движением транспортного средства на основе сформированного плана движения,
в котором блок управления выполнен с возможностью установления режима движения транспортного средства в первый режим, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения, и затем продолжает движение по новому пути, который отклонен от маршрута, который соответствует сформированному плану движения.
2. Контроллер транспортного средства по п. 1, в котором, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, а затем возвращается на маршрут, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме в течение заранее установленного периода времени или в пределах заранее установленного расстояния, независимо от сформированного плана движения.
3. Контроллер транспортного средства по п. 1, в котором, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, а затем возвращается на маршрут, блок управления выполнен с возможностью поддержания первого режима движения транспортного средства в зоне этого маршрута, где транспортное средство движется вначале после возвращения, независимо от сформированного плана движения.
4. Контроллер транспортного средства по п. 1, в котором, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, а затем возвращается на этот маршрут, то, если второй режим назначается для зоны маршрута, где транспортное средство движется вначале после возвращения, а расстояние до зоны, где первый режим назначается первый раз после зоны, где транспортное средство движется вначале после возвращения, меньше или равно фиксированному расстоянию, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме, по меньшей мере, до зоны, для которой первый режим назначен первый раз, после зоны, где транспортное средство впервые движется вначале после возвращения.
5. Контроллер транспортного средства по п. 1, в котором
блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения, при этом
когда транспортное средство отклоняется от маршрута и происходит перерасчет маршрута, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме в течение заранее установленного периода времени или в пределах заранее установленного расстояния, независимо от нового сформированного плана движения.
6. Контроллер транспортного средства по п. 1, в котором блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения, при этом
когда транспортное средство отклоняется от маршрута и происходит перерасчет маршрута, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме в зоне маршрута, куда транспортное средство впервые возвращается вначале после перерасчета, независимо от нового сформированного плана движения.
7. Контроллер транспортного средства по п. 1, в котором
блок планирования движения выполнен с возможностью перерасчета маршрута и формирования нового плана движения по истечении фиксированного периода времени от момента отклонения транспортного средства от маршрута, соответствующего плану движения, при этом
когда транспортное средство отклоняется от маршрута и выполняется перерасчет маршрута, если второй режим назначен для зоны маршрута, где транспортное средство впервые движется вначале после перерасчета, а расстояние до зоны, где первый режим назначается первый раз после зоны, где транспортное средство движется вначале после перерасчета, меньше или равно фиксированному расстоянию, блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме, по меньшей мере, до зоны, для которой назначается первый режим первый раз, после зоны, где транспортное средство впервые движется вначале после перерасчета.
8. Контроллер транспортного средства по п. 5, в котором
когда отклонение транспортного средства от маршрута или перерасчет повторяется заранее установленное количество раз или более,
блок управления выполнен с возможностью поддержания режима движения транспортного средства в первом режиме, при этом блок планирования движения выполнен с возможностью прекращения формирования плана движения.
9. Контроллер транспортного средства, который выполняет управление движением, на транспортном средстве, характеризующийся тем, что транспортное средство выбирает один из режимов, первый режим или второй режим, в качестве режима движения и движется в этом режиме, при этом транспортное средство дает приоритет движению с приводом от электродвигателя, при этом ограничивая или запрещая задействование двигателя внутреннего сгорания при движении в первом режиме, при этом транспортное средство приводится в движение, по меньшей мере, одним из агрегатов, электродвигателем или двигателем внутреннего сгорания, при движении во втором режиме, и транспортное средство движется по маршруту от начальной точки до места назначения, который включает в себя различные зоны, контроллер транспортного средства включает в себя следующее:
блок планирования движения, который формирует план движения, назначающий один из режимов, первый режим или второй режим, в качестве режима движения для каждой зоны, включенной в маршрут; и
блок управления, который управляет движением транспортного средства на основе сформированного плана движения, где блок управления выполнен с возможностью принудительного установления режима движения транспортного средства в первый режим, когда транспортное средство отклоняется от маршрута, соответствующего плану движения, и затем продолжает движение по новому пути, который отклонен от маршрута, который соответствует сформированному плану движения.
10. Способ управления движением на транспортном средстве, выполняемый контроллером транспортного средства, способ включает в себя следующее:
выбор одного из режимов, первого режима или второго режима, в качестве режима движения и движение транспортного средства в этом режиме движения,
расходование энергии аккумуляторной батареи, когда транспортное средство движется в первом режиме;
поддержание количества аккумулированной энергии аккумуляторной батареи, когда транспортное средство движется во втором режиме;
движение транспортного средства по маршруту от начальной точки к месту назначения, который состоит из различных зон;
формирование плана движения, который назначает один из режимов, первый режим или второй режим, для каждой зоны, включенной в маршрут;
управление движением транспортного средства на основе сформированного плана движения; и
установление режима движения транспортного средства в первом режим, когда транспортное средство отклоняется от маршрута, который соответствует сформированному плану движения, и затем продолжает движение по новому пути, который отклонен от маршрута, который соответствует сформированному плану движения.
11. Способ управления движением на транспортном средстве, выполняемый контроллером транспортного средства, способ включает в себя следующее:
выбор одного из режимов, первого режима или второго режима, в качестве режима движения и движение транспортного средства в этом режиме движения;
предоставление приоритета движению с приводом от электродвигателя, при этом привод от двигателя внутреннего сгорания ограничен или запрещен при движении транспортного средства в первом режиме;
движение с приводом, по крайней мере, от одного из агрегатов, электродвигателя или двигателя внутреннего сгорания, когда транспортное средство движется во втором режиме;
движение транспортного средства по маршруту от начальной точки к месту назначения, который состоит из различных зон;
формирование плана движения, который назначает один из режимов, первый режим или второй режим, в качестве режима движения для каждой зоны, включенной в маршрут;
управление движением транспортного средства на основе сформированного плана движения, и
принудительное установление режима движения транспортного средства в первый режим, когда транспортное средство отклоняется от маршрута, который соответствует плану движения, и затем продолжает движение по новому пути, который отклонен от маршрута, который соответствует сформированному плану движения.
| JP 2013169915 A, 02.09.2013 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Объемное сопротивление | 1961 |
|
SU147625A1 |

