Изобретение относится к области технических средств бесконтактного рентгеновского досмотра крупногабаритных объектов и может использоваться для обнаружения в них незаконных скрытых вложений, например, наркотических средств, взрывчатых веществ, оружия и др., на таможенных и полицейских пунктах пропуска и контроля.
Известны три вида инспекционно-досмотровых комплексов (ИДК): стационарные, легковозводимые (перебазируемые) и мобильные. Наиболее дешевыми, эффективными и удобными в эксплуатации считаются мобильные инспекционно-досмотровые комплексы (МИДК) [1].
Подавляющее большинство МИДК как российского, так и зарубежного производства имеют единый принцип работы (сканирование объекта контроля веерообразным рентгеновским пучком) и типовой набор функциональных систем, входящих в их состав [2]. Нормативным документом, определяющим состав любого мобильного ИДК и регламентирующим их эксплуатацию, является [3, п. 3.7].
Известные МИДК [4, 5], являющимися аналогами, в рабочем состоянии разворачивают стрелу с детекторной линейкой, образуя при этом, так называемые, П-образные «ворота», в створе которых располагается контролируемый крупногабаритный объект. Перед началом сканирования источник рентгеновского излучения (ИРИ) и связанные с ним П-образные «ворота» опускаются как можно ближе к поверхности рабочей площадки. Это необходимо для просвечивания рентгеновским пучком не только верхних, но и нижних частей объекта контроля (ОК). Опускание данного оборудования осуществляется за счет уменьшения давления воздуха во всех пневматических рессорах (пневматических подушках) автомобильного шасси МИДК до его минимально-допустимого значения.
Этим процессом автоматически управляет компьютерная система, управляющая подачей соответствующим образом сжатого воздуха во все пневморессоры для амортизации шасси и чтобы оно оставалось на заданном расстоянии от поверхности земли при перемещении МИДК по дорогам общего пользования, или сбросом воздуха из всех пневморессор, чтобы опустить шасси и оборудование в нижнее положение. Такие системы имеют место во всех автомобилях с пневматическими рессорами.
При сбросе давления воздуха до минимально-допустимого значения автомобильное шасси с расположенным на нем оборудованием МИДК будет опираться на механические стопорные колодки. Однако при этом амортизация автомобильного тягача и, безусловно, стабилизация «ворот» в их исходном положении при перемещении МИДК во время сканирования по рабочей площадке с имеющимися на ней неровностями, практически сводится к нулю. Такая ситуация возникает часто при досмотре ОК в полевых условиях на недостаточно выровненной рабочей площадке (например, сотрудниками ГИБДД и оперативными работниками полиции) или на бетонной площадке таможенного пункта пропуска, но имеющей большую наледь в весенне-зимний и осенне-зимний периоды эксплуатации. Ухудшения стабилизации оборудования МИДК связано с тем, что ИРИ и «ворота» через поворотный механизм жестко связаны с шасси автомобильного тягача.
В свою очередь, ухудшение стабилизации оборудования приводит к неизбежному возникновению поперечного раскачивания П-образных «ворот» относительно неподвижного ОК. Раскачивание же «ворот» снижает качество получаемого рентгеновского изображения ОК за счет «смазывания» и искажения отдельных его фрагментов. Так как габариты и масса «ворот» существенны, то их раскачивание и «смазывание» изображения могут быть значительными. К раскачиванию «ворот» может привести также и воздействие ветра на их конструкцию. В этом заключается главный недостаток аналогов.
Следует отметить, что кроме пневматических рессор в автомобильных тягачах МИДК имеются еще и амортизаторы, которые при совершении марша МИДК по дорогам общего пользования гасят резкие колебания всего комплекса при относительно глубоких ямах или существенных выступах на дорогах. Кроме того, амортизаторы демпфируют возможные длительные колебания (или раскачивания) на пневмоподушках оборудования МИДК, когда возникает, так называемый, эффект «мячика».
Для исключения раскачивания «ворот» необходимо:
а) применять МИДК на идеально ровной рабочей площадке;
б) использовать соответствующие системы стабилизации ИРИ с развернутой стрелой.
Первый путь далеко не всегда выполним, так как МИДК применяются, как указывалось выше, и в полевых условиях, на заснеженных рабочих площадках, где неизбежно будут кочки, выбоины, ухабы и т.п.
Второй путь предпочтительнее, так как позволяет использовать МИДК на различных по качеству рабочих площадках.
Наиболее близким по техническому решению является мобильный ин-спекционно-досмотровый комплекс [6]. В прототипе между автомобильным шасси и поворотным механизмом дополнительно введен стабилизирующий механизм, состоящий из неподвижной и подвижной (качающейся) платформ, соединенных между собой посредством стержня, позволяющего вращаться в одной плоскости подвижной платформе относительно неподвижной. Неподвижная платформа жестко связана с автомобильным шасси, а подвижная платформа - с поворотным механизмом ИРИ и «ворот». Между платформами по их периметру попарно установлены дополнительные пневматические рессоры и амортизаторы, которые и стабилизируют ИРИ и «ворота» от поперечных раскачиваний.
Основным недостатком прототипа является то, что в нем устраняются только лишь поперечные раскачивания П-образных «ворот». Очевидно, что при движении МИДК по неровной площадке будут возникать и их продольные раскачивания, которые, безусловно, будут значительно меньше, чем поперечные в силу конструкции и расположения «ворот» на шасси, а также в силу медленной скорости движения МИДК при сканировании ОК (от нескольких сотен метров до нескольких километров в час в зависимости от вида и типа МИДК). Раскачивания в продольной плоскости визуально могут быть незаметными за счет конструкции стабилизирующего механизма. Однако эти, вроде бы незначительные, продольные раскачивания «ворот» будут приводить к существенным механическим воздействия на обе платформы и стержень стабилизирующего механизма. В результате при таких длительных разрушающих механических нагрузках обе платформы и стержень (не зависимо от материала их изготовления) будут постепенно деформироваться и, в конечном итоге, выйдут из строя. Замена такого важного узла, как стабилизирующий механизм, потребует значительных финансовых и временных затрат.
Целью предлагаемого изобретения является повышение надежности стабилизирующего механизма за счет исключения раскачиваний в продольной плоскости П-образных «ворот» при движении МИДК по неровной рабочей площадке во время сканирования, приводящих к механической деформации элементов стабилизирующего механизма.
Поставленная цель достигается тем, что в мобильном инспекционно-досмотровом комплексе, содержащем оборудование комплекса, установленное на автомобильном шасси, источник рентгеновского излучения, стрелу с детекторной линейкой, образующие в рабочем положении комплекса П-образные «ворота», в створе которых располагается крупногабаритный объект контроля, поворотный механизм ИРИ и «ворот», пневматические рессоры и амортизаторы автомобильного шасси по количеству колес в автомобильном тягаче, а также стабилизирующий механизм, состоящий из неподвижной и подвижной (качающейся) платформ, причем, неподвижная платформа жестко связана с автомобильным шасси, с подвижной платформой жестко связан поворотный механизм ИРИ и «ворот», а между платформами по их периметру установлены пневматические стойки, количество которых зависит от формы платформ, причем, подвижная платформа при необходимости (например, при движении МИДК в маршевом положении) может фиксироваться от раскачивания с помощью специальных фиксаторов, а платформы стабилизирующего механизма между собой соединяются по типу сферического (шарового) шарнира.
Выше было рассмотрено предназначение пневморессор и амортизаторов по раздельности. Однако известно не раздельное исполнение пневморессор и амортизаторов, а их совмещенное техническое исполнение в одном функциональном узле, называемом «Пневматическая стойка». Назначение данных пневматических стоек соответствует назначениям пневморессор и амортизаторов. Применение пневмостоек несколько упростит конструкцию стабилизирующего механизма, поэтому далее в стабилизирующем механизме предлагаемого изобретения будут использованы пневматические стойки с соответствующим их графическим изображением на рисунках.
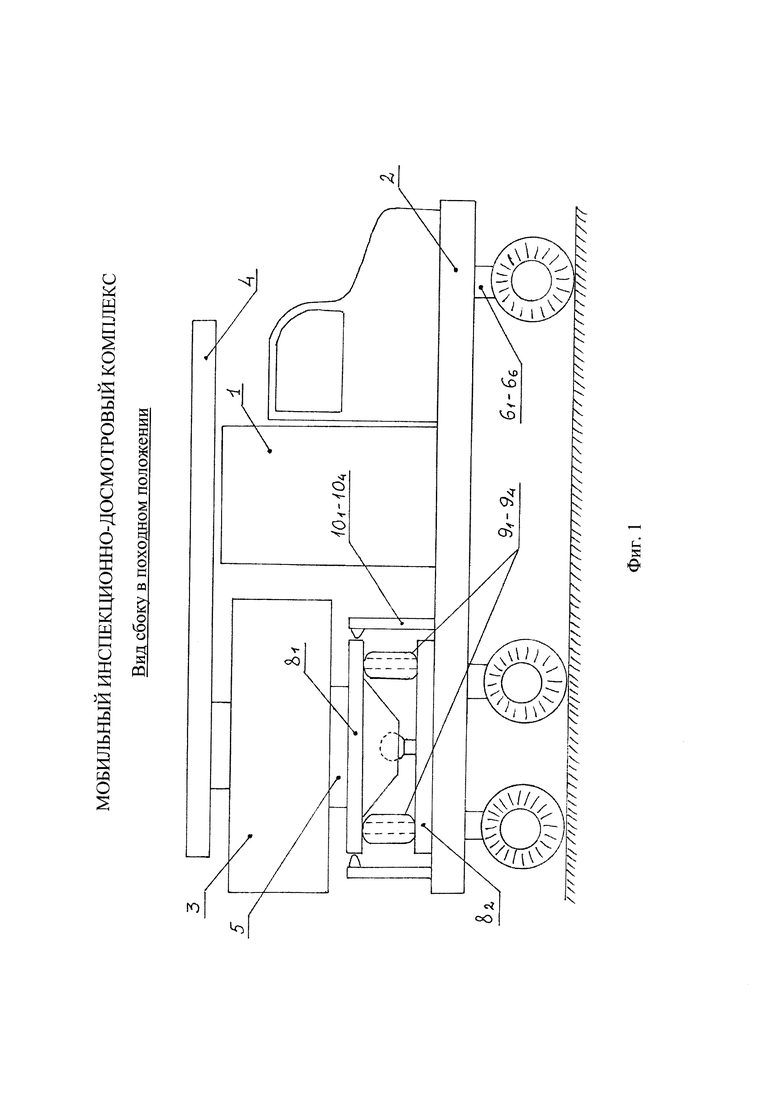
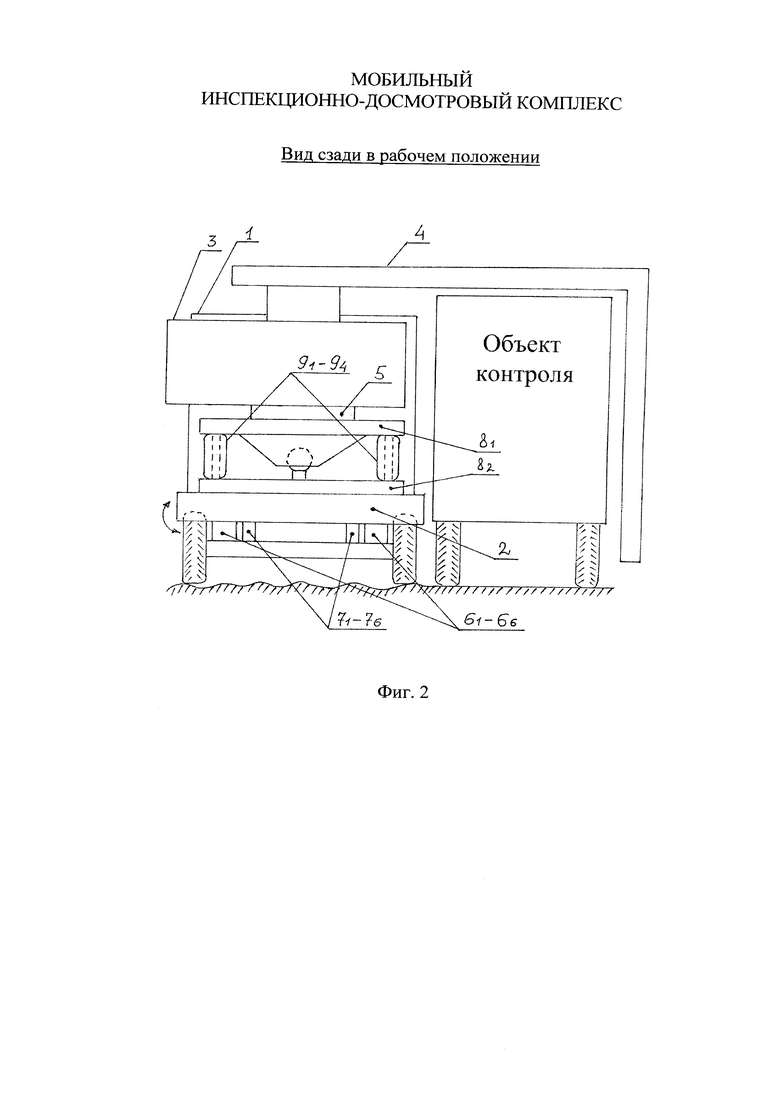
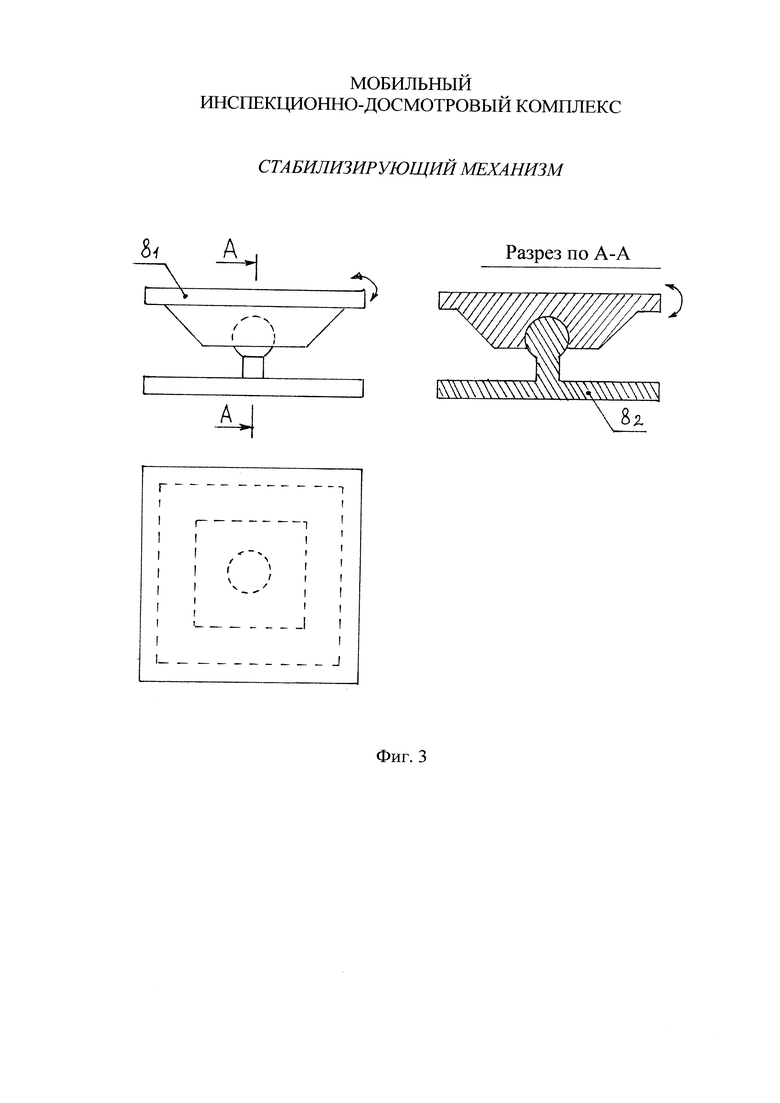
Принцип действия мобильного инспекционно-досмотрового комплекса поясняется фиг. 1, на которой изображен его вид сбоку в походном положении; фиг. 2, на которой представлен вид сзади МИДК в рабочем положении, а также фиг. 3, где представлен чертеж стабилизирующего механизма.
Мобильный ИДК включает в себя оборудование комплекса 1, размещенное на автомобильном шасси 2, источник рентгеновского излучения 3, стрелу 4 с детекторной линейкой, поворотный механизм ИРИ и «ворот» 5, основные пневматические рессоры по количеству колес в автомобильном тягаче 61-66, основные амортизаторы (также по количеству колес в тягаче) 71-76, стабилизирующий механизм 8, состоящий из двух платформ: подвижной (качающейся) 81 и неподвижной 82. Эти платформы между собой соединяются по типу сферического (шарового) шарнира. Неподвижная платформа 82 жестко связана с автомобильным шасси 2, а на подвижной платформе жестко устанавливается поворотный механизм 5, который разворачивает ИРИ 3 со стрелой 4 в рабочее состояние. Кроме того, в состав МИДК входят четыре пневматические стойки 91-94 и четыре фиксатора подвижной платформы 101-104.
Пневмостойки 91-94 размещаются и жестко крепятся в вертикальном положении по углам стабилизирующего механизма между двумя прямоугольными платформами (неподвижной и качающейся). Это, в свою очередь, приводит и к исключению возможных вращательных движений подвижной платформы 81 (П-образных «ворот» в том числе) на сферическом шарнире при сканировании комплексом объекта контроля. Количество пневмостоек может быть иным, что зависит от конкретной реализации платформ (например, в форме круга).
Фиксаторы ИРИ 101-104 являются съемными элементами МИДК и устанавливаются оператором для предотвращения возможного раскачивания ИРИ со сложенной стрелой при движении МИДК по автодорогам. Они могут крепиться между подвижной платформой 81 и шасси автомобиля 2 (как показано на фиг. 1) или другими способами. В рабочем состоянии при сканировании ОК фиксаторы не устанавливаются (см. фиг. 2). Количество фиксаторов также может быть иным.
Здесь фиксаторы подвижной платформы представлены как съемные элементы, однако их конструктивное исполнение может быть самым различным, например, они могут быть автоматически отключаемыми и подключаемыми по командам оператора и др.
В створе «ворот» МИДК располагается крупногабаритный объект контроля, например, автотранспортное средство.
На фиг. 3 представлен чертеж основного функционального узла предлагаемого изобретения - шарнирного стабилизирующего механизма: вид прямо, сверху и сбоку (в разрезе). Шарниром называют пару деталей, одна из которых совершает вращательные, колебательные и угловые перемещения по всем направлениям относительно другой детали. В шарнирах не происходит передача изгибающего или скручивающего моментов между его деталями благодаря минимальному трению между ними. На рисунке не показаны конструктивные элементы, снижающие трение в шарнире (каналы для смазки, специальные промежуточные прокладки и пр.).
Конструкция стабилизирующего механизма, в частности, диаметр шара и его высота, зависит от двух основных факторов: от общего веса ИРИ и «ворот» и от крепости используемого для их изготовления материала (сталь или, например, титановый сплав).
Мобильный ИДК работает следующим образом.
В походном положении стрела 4 сложена и расположена вдоль оси симметрии автомобильного тягача, давление воздуха в пневматических рессорах шасси и пневмостойках стабилизирующего механизма номинальное, подвижная платформа 81 стабилизирующего механизма жестко зафиксирована с помощью фиксаторов 101-104.
При прибытии на место проведения сканирования ОК происходит перевод МИДК из походного (маршевого) положения в рабочее, а именно:
- поворот ИРИ со стрелой с помощью механизма 5 перпендикулярно оси симметрии автомобильного тягача;
- раскладывание стрелы 4 с детекторной линейкой и образование П-образных «ворот»;
- опускание ИРИ и П-образных «ворот» вниз к рабочей площадке путем снижения давления воздуха в основных пневматических рессорах 61-66 до минимально-допустимого значения;
- расфиксация подвижной платформы стабилизирующего механизма (или ИРИ со стрелой), т.е. удаление фиксаторов 101-104.
После проведения данных подготовительных операций МИДК готов к сканированию крупногабаритных объектов.
С удалением фиксаторов происходит исключение жесткой связи между подвижной платформой 81 и автомобильным шасси 2.
В то же время из конструкции видно, что при движении МИДК по неровностям неподвижная платформа 82 будет совершать синхронные раскачивания вместе с автомобильным шасси 2, так как она с ним жестко связана.
Во время сканирования для предотвращения раскачивания П-образных «ворот» при движении МИДК по неровной рабочей площадке давление в пневмостойках 91-94 должно оставаться номинальным и одинаковым. Тогда эти пневмостойки будут поддерживать подвижную платформу 81, раскачивающуюся в разных плоскостях, в стабильном положении не зависимо от положения и дестабилизирующего воздействия неподвижной платформы 82 (или автомобильного шасси). Это сведет к минимуму раскачивание П-образных «ворот» во всех плоскостях на любых по качеству рабочих площадках. Никаких механических нагрузок на обе платформы не будет в силу их шарового соединения, даже если и останутся незначительные раскачивания «ворот».
Таким образом, в изобретении путем применения стабилизирующего механизма в виде двух платформ, соединенных между собой по типу сферического шарнира, с установленными жестко между ними пневматическими стойками, практически исключены различные механические разрушающие деформации элементов стабилизирующего механизма, а также раскачивания «ворот» в любых плоскостях, что, в свою очередь, исключает искажения и «смазывания» рентгеновских изображений объектов контроля. Кроме того, применив в стабилизирующем механизме пневматические стойки, заметно упрощена его конструкция.
Источники информации
1. Малышенко Ю.В. и др. Начальная подготовка персонала инспекционно-досмотровых комплексов: учебник. - Владивосток: Владивостокский филиал Российской таможенной академии, 2010. - 460 с.
2. Вербов В.Ф. и др. Таможенное дело: инспекционно-досмотровые комплексы России и зарубежных государств: учебное наглядное пособие. - Ростов-на-Дону: Ростовский филиал Российской таможенной академии, 2015. - 146 с.
3. Приказ Федеральной таможенной службы России от 24.01.2005 №52 «Об утверждении Концепции создания системы таможенного контроля крупногабаритных грузов и транспортных средств».
4. Вербов В.Ф. и др. Таможенное дело: теория и практика применения мобильных инспекционно-досмотровых комплексов: учебник. - Ростов-на-Дону: Ростовский филиал Российской таможенной академии, 2015. - 292 с.
5. HCV-Mobile. Heiman CarqoVision mobile: учебное пособие технического специалиста. Издательство «Smiths Heiman», 2007.
6. Вербов В.Ф. и др. Мобильный инспекционно-досмотровый комплекс. Патент Российской Федерации на изобретение №2623199, 2017. (Прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2016 |
|
RU2623199C1 |
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2020 |
|
RU2747472C1 |
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2019 |
|
RU2733334C1 |
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2020 |
|
RU2767164C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2758189C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2018 |
|
RU2731683C2 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2021 |
|
RU2790940C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2024 |
|
RU2829571C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2813217C1 |
| СТАЦИОНАРНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2023 |
|
RU2805289C1 |
Использование: для бесконтактного рентгеновского досмотра крупногабаритных объектов. Сущность изобретения заключается в том, что мобильный инспекционно-досмотровый комплекс содержит оборудование комплекса, установленное на автомобильном шасси, источник рентгеновского излучения (ИРИ), стрелу с детекторной линейкой, образующие в рабочем положении комплекса П-образные «ворота», в створе которых располагается крупногабаритный объект контроля, поворотный механизм ИРИ и «ворот», пневматические рессоры и амортизаторы автомобильного шасси по количеству колес в автомобильном тягаче, а также стабилизирующий механизм, состоящий из неподвижной и подвижной (качающейся) платформ, причем неподвижная платформа жестко связана с автомобильным шасси, с подвижной платформой жестко связан поворотный механизм ИРИ и «ворот», а между платформами по их периметру установлены дополнительные пневматические стойки, количество которых зависит от формы платформ, причем подвижная платформа при необходимости может фиксироваться от вращения с помощью специальных фиксаторов, при этом платформы стабилизирующего механизма между собой соединяются по типу сферического (шарового) шарнира. Технический результат: повышение надежности стабилизирующего механизма. 3 ил.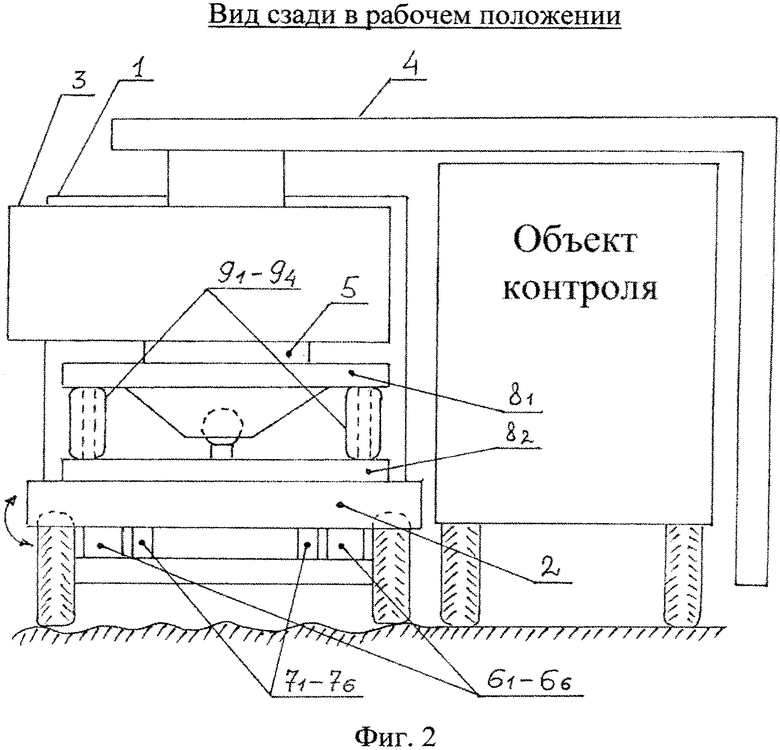
Мобильный инспекционно-досмотровый комплекс, содержащий оборудование комплекса, установленное на автомобильном шасси, источник рентгеновского излучения (ИРИ), стрелу с детекторной линейкой, образующие в рабочем положении комплекса П-образные «ворота», в створе которых располагается крупногабаритный объект контроля, поворотный механизм ИРИ и «ворот», пневматические рессоры и амортизаторы автомобильного шасси по количеству колес в автомобильном тягаче, а также стабилизирующий механизм, состоящий из неподвижной и подвижной (качающейся) платформ, причем неподвижная платформа жестко связана с автомобильным шасси, с подвижной платформой жестко связан поворотный механизм ИРИ и «ворот», а между платформами по их периметру установлены дополнительные пневматические стойки, количество которых зависит от формы платформ, причем подвижная платформа при необходимости может фиксироваться от вращения с помощью специальных фиксаторов, отличающийся тем, что платформы стабилизирующего механизма между собой соединяются по типу сферического (шарового) шарнира.
| МОБИЛЬНЫЙ ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2016 |
|
RU2623199C1 |
| МОБИЛЬНАЯ СИСТЕМА ОСМОТРА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2007 |
|
RU2378641C2 |
| ПЕРЕВОЗИМАЯ НА АВТОМОБИЛЯХ МОБИЛЬНАЯ УСТАНОВКА ДЛЯ ПРОВЕРКИ КОНТЕЙНЕРА | 2003 |
|
RU2314942C2 |
| МОБИЛЬНАЯ КОНСОЛЬНАЯ СИСТЕМА ДВЕРНОГО ТИПА ДЛЯ ДОСМОТРА ГРУЗОВИКОВ-КОНТЕЙНЕРОВОЗОВ | 2007 |
|
RU2381490C2 |
| WO 2015020546 A2, 12.02.2015 | |||
| US 5903623 A, 11.05.1999. | |||

