Изобретение относится к горной промышленности и может быть использовано для открытой разработки месторождений полезных ископаемых с неравномерным распределением и сложной конфигурацией рудных тел.
Известен ковш фронтального погрузчика, включающий заднюю челюсть в виде отвала с ножом и боковинами, а также переднюю челюсть с кронштейнами, с одного конца которых установлены свободно вращающиеся дисковые ножи, а с противоположного подрезающие косо установленные ножи [1].
Недостатком данной конструкции является невозможность селективной выемки при разработке сложноструктурных месторождений, кондиционность горных пород которых невозможно определить визуально.
Известен способ контроля качества железорудного материала в ковше горного погрузочного средства и устройство для его осуществления, основанные на измерении магнитной восприимчивости железорудного материала и отнесении материала к тому или иному качеству [2]. Измерения проводятся для материала, находящегося в ковше погрузочного устройства с учетом предварительно полученной таблицы соответствия показаний магнитометров и процентного содержания железа.
Недостатком способа и устройства для его осуществления является перемешивание в ковше погрузчика горной массы различных кондиций и пустой породы, после чего определяется среднее содержание полезного компонента в ковше.
Наиболее близким по технологической сущности является способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых, включающий фрезерование массива горных пород слоями фиксированной ширины и изменяемой глубины, селективную выемку слоев горных пород с неравномерным распределением и сложной конфигурацией горных пород в плане, различными качественными и физико-механическими характеристиками горных пород, формирование горной массы управляемого гранулометрического и качественного состава, отгружаемой погрузчиком в автосамосвалы, контроль управления процессом отгрузки в автосамосвалы с помощью автоматической системы контроля, включающей установленные на консоли датчики, систему обработки информации, дифференциацию участков горной массы в плане на элементы [3].
Недостатками данного способа являются неполная загрузка ковша погрузчика при слоевом черпании отфрезерованной горной массы, трудность селективной выемки при работе на границе выемочных элементов со сложной конфигурацией в плане, частичное перемешивание горных пород на границе выемочных элементов при выемке.
Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности ведения добычных работ при неравномерном распределении и сложной конфигурации горных пород в плане.
Технический результат достигается тем, что в способе послойной разработки сложноструктурных месторождений твердых полезных ископаемых, включающем фрезерование массива горных пород слоями фиксированной ширины и изменяемой глубины, селективную выемку слоев горных пород с неравномерным распределением и сложной конфигурацией горных пород в плане, различными качественными и физико-механическими характеристиками горных пород, формирование горной массы управляемого гранулометрического и качественного состава, отгружаемой погрузчиком в автосамосвалы, контроль управления процессом отгрузки в автосамосвалы с помощью автоматической системы контроля, включающей установленные на консоли датчики, систему обработки информации, дифференциацию участков горной массы в плане на элементы, для исключения потерь кондиционной горной массы при фиксации посредством датчиков, установленных на консоли, шарнирно связанной с козырьком, границы разделения элементов под различными углами к направлению движения погрузчика, ориентированного продольно элементу горной массы в плане, осуществляется поворот козырька в плане относительно шарнира посредством гидроцилиндра для захвата горной массы по границе разделения элементов на соответствующий угол по отношению к ковшу погрузчика, при этом при опускании козырька посредством гидроцилиндров осуществляется одновременное выдвижение гидроцилиндрами телескопической рамы для обеспечения вертикального перемещения режущей кромки козырька по границе элемента горной массы, а продвижение призмы волочения горной массы внутрь ковша обеспечивается посредством втягивания телескопической рамы с одновременным поворотом козырька в горизонтальной плоскости в положение перпендикулярное продольной оси погрузчика, причем перед опусканием козырька консоли с датчиками посредством привода поворачиваются по часовой стрелке в вертикальной плоскости, при этом автоматическая система контроля установлена на погрузчике.
Возможность формирования требуемой последовательности выполняемых действий новым способом и предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
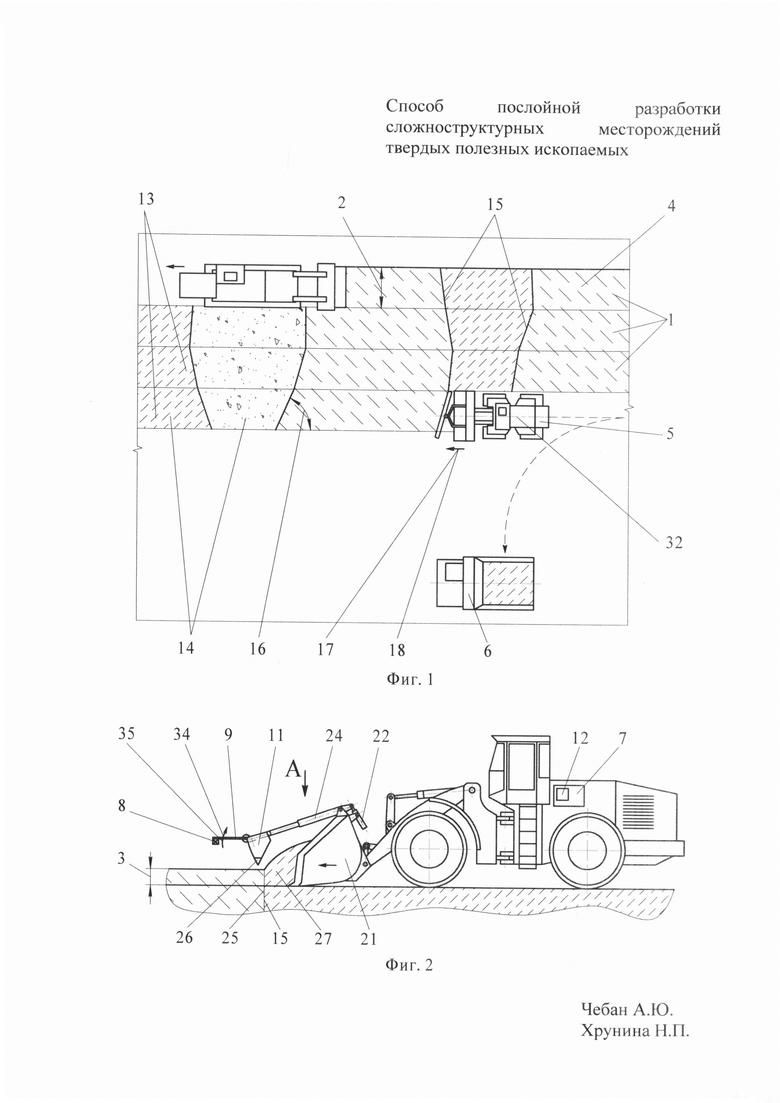
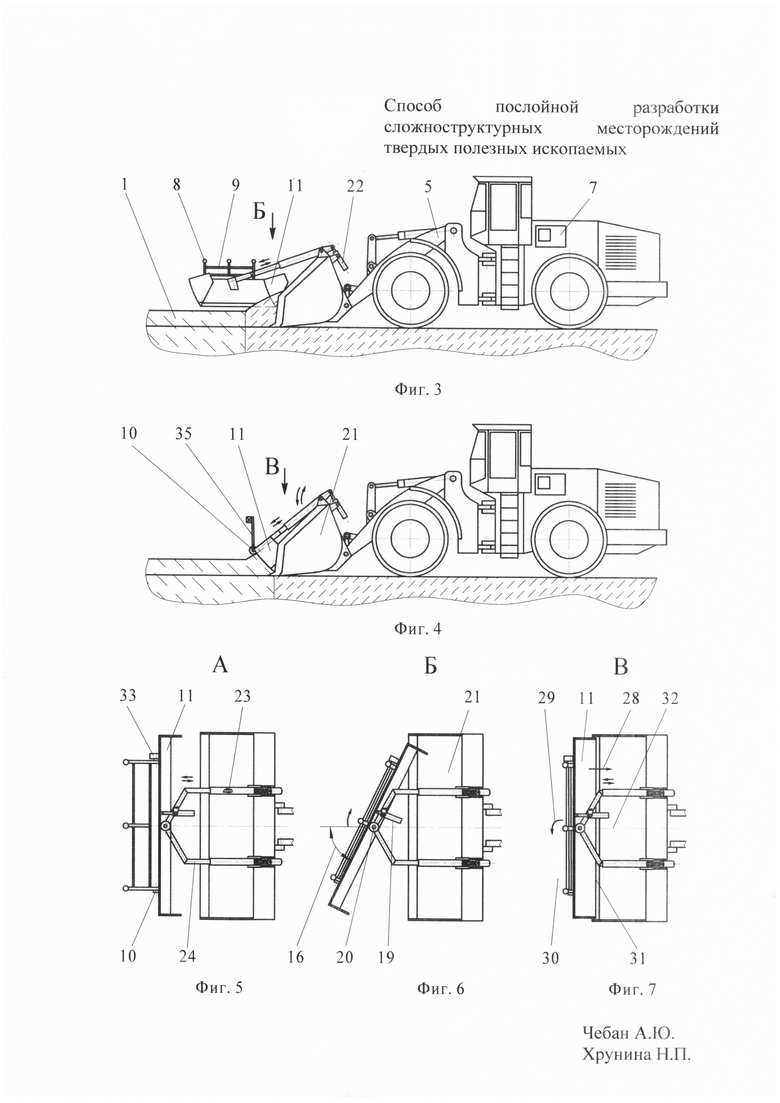
На фиг. 1 - схема разработки месторождения в плане; на фиг. 2 - послойная выемка элемента горной массы ковшом погрузчика; на фиг. 3 - поворот козырька в плане для захвата горной массы по границе разделения элементов; на фиг. 4 - закрывание козырька ковша погрузчика; на фиг. 5 - вид А на фиг. 2; на фиг. 6 - вид Б на фиг. 3; на фиг. 7 - вид В на фиг. 4.
Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых включает фрезерование массива слоями 1 фиксированной ширины 2 и изменяемой глубины 3 с неравномерным распределением и сложной конфигурацией горных пород в плане 4. Горная масса отгружается погрузчиком 5 в автосамосвалы 6. Автоматическая система контроля 7 включает датчики 8, установленные на консоли 9, шарнирно 10 связанной с козырьком 11, и систему обработки информации 12. Участки 13 горной массы в плане 4 дифференцируются на элементы 14. Определяются границы 15 разделения элементов 14 под различными углами 16 к направлению 17 движения погрузчика 5, ориентированного продольно 18 элементу 14 горной массы в плане 4. Козырек 11 посредством гидроцилиндра 19 поворачивается в плане 4 относительно шарнира 20 на соответствующий угол 16 по отношению к ковшу 21 погрузчика 5. При опускании козырька 11 посредством гидроцилиндров 22 осуществляется одновременное выдвижение гидроцилиндрами 23 телескопической рамы 24 для обеспечения вертикального 25 перемещения режущей кромки 26 козырька 11 по границе 15 элемента 14 горной массы. Продвижение призмы волочения 27 горной массы внутрь 28 ковша 21 обеспечивается посредством втягивания телескопической рамы 24 с одновременным поворотом 29 козырька 11 в горизонтальной плоскости 30 в положение перпендикулярное 31 продольной оси 32 погрузчика 5. Перед опусканием козырька 11 консоли 9 посредством привода 33 поворачиваются по часовой стрелке 34 в вертикальной плоскости 35. Автоматическая система контроля 7 установлена на погрузчике 5.
Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых реализуется следующим образом.
Осуществляется фрезерование массива горных пород слоями 1 фиксированной ширины 2 и изменяемой глубины 3. Ведется селективная выемка слоев 1 горных пород с неравномерным распределением и сложной конфигурацией горных пород в плане 4, различными качественными и физико-механическими характеристиками горных пород. Осуществляется формирование горной массы управляемого гранулометрического и качественного состава, которая отгружается погрузчиком 5 в автосамосвалы 6. Контроль управления процессом отгрузки в автосамосвалы 6 производится с помощью автоматической системы контроля 7, установленной на погрузчике 5 и включающей установленные на консоли 9 датчики 8, а также систему обработки информации 12. Выполняется дифференциация участков 13 горной массы в плане 4 на элементы 14. Для исключения потерь кондиционной горной массы при фиксации посредством датчиков 8, установленных на консоли 9, шарнирно 10 связанной с козырьком 11, границы 15 разделения элементов 14 под различными углами 16 к направлению 17 движения погрузчика 5, ориентированного продольно 18 элементу 14 горной массы в плане 4, осуществляется поворот козырька 11 в плане 4 относительно шарнира 20 посредством гидроцилиндра 19 для захвата горной массы по границе 15 разделения элементов 14 на соответствующий угол 16 по отношению к ковшу 21 погрузчика 5. При опускании козырька 11 посредством гидроцилиндров 22 осуществляется одновременное выдвижение гидроцилиндрами 23 телескопической рамы 24 для обеспечения вертикального 25 перемещения режущей кромки 26 козырька 11 по границе 15 элемента 14 горной массы. Продвижение призмы волочения 27 горной массы внутрь 28 ковша 21 обеспечивается посредством втягивания телескопической рамы 24 с одновременным поворотом 29 козырька 11 в горизонтальной плоскости 30 в положение перпендикулярное 31 продольной оси 32 погрузчика 5. Перед опусканием козырька 11 консоли 9 посредством привода 33 поворачиваются по часовой стрелке 34 в вертикальной плоскости 35.
Способ повышает производительность одноковшового погрузчика, увеличивает достоверность селективной выемки, надежность и расширяет технологическую эффективность ведения добычных работ при неравномерном распределении и сложной конфигурации горных пород в плане.
Источники информации
1. Пат. РФ №2541321, МПК E02F 3/40 Ковш фронтального погрузчика.
2. Пат. РФ №2595018, МПК E02F 7/04, Е21С 39/00 Способ контроля качества железорудного материала в ковше горного погрузочного средства и устройство для его осуществления.
3. Пат. РФ №2634150, МПК Е21С 41/26, Е21С 47/00, Е21С 27/24 Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых.
Изобретение относится к горной промышленности и может быть использовано для открытой разработки месторождений полезных ископаемых с неравномерным распределением и сложной конфигурацией рудных тел. Технический результат заключается в повышении производительности, надежности и расширении технологической эффективности ведения добычных работ при неравномерном распределении и сложной конфигурации горных пород в плане. Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых включает фрезерование массива горных пород слоями фиксированной ширины и изменяемой глубины, селективную выемку слоев горных пород с неравномерным распределением и сложной конфигурацией горных пород в плане, контроль управления процессом отгрузки в автосамосвалы с помощью автоматической системы контроля, дифференциацию участков горной массы в плане на элементы. Для исключения потерь кондиционной горной массы при фиксации посредством датчиков, осуществляется поворот козырька в плане относительно шарнира посредством гидроцилиндра для захвата горной массы по границе разделения элементов на соответствующий угол по отношению к ковшу погрузчика. При опускании козырька посредством гидроцилиндров осуществляется одновременное выдвижение гидроцилиндрами телескопической рамы для обеспечения вертикального перемещения режущей кромки козырька по границе элемента горной массы. 7 ил.
Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых, включающий фрезерование массива горных пород слоями фиксированной ширины и изменяемой глубины, селективную выемку слоев горных пород с неравномерным распределением и сложной конфигурацией горных пород в плане, различными качественными и физико-механическими характеристиками горных пород, формирование горной массы управляемого гранулометрического и качественного состава, отгружаемой погрузчиком в автосамосвалы, контроль управления процессом отгрузки в автосамосвалы с помощью автоматической системы контроля, включающей установленные на консоли датчики, систему обработки информации, дифференциацию участков горной массы в плане на элементы, отличающийся тем, что для исключения потерь кондиционной горной массы при фиксации посредством датчиков, установленных на консоли, шарнирно связанной с козырьком, границы разделения элементов под различными углами к направлению движения погрузчика, ориентированного продольно элементу горной массы в плане, осуществляется поворот козырька в плане относительно шарнира посредством гидроцилиндра для захвата горной массы по границе разделения элементов на соответствующий угол по отношению к ковшу погрузчика, при этом при опускании козырька посредством гидроцилиндров осуществляется одновременное выдвижение гидроцилиндрами телескопической рамы для обеспечения вертикального перемещения режущей кромки козырька по границе элемента горной массы, а продвижение призмы волочения горной массы внутрь ковша обеспечивается посредством втягивания телескопической рамы с одновременным поворотом козырька в горизонтальной плоскости в положение, перпендикулярное продольной оси погрузчика, причем перед опусканием козырька консоли с датчиками посредством привода поворачиваются по часовой стрелке в вертикальной плоскости, при этом автоматическая система контроля установлена на погрузчике.
| СПОСОБ ПОСЛОЙНОЙ РАЗРАБОТКИ СЛОЖНОСТРУКТУРНЫХ МЕСТОРОЖДЕНИЙ ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2016 |
|
RU2634150C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ЖЕЛЕЗОРУДНОГО МАТЕРИАЛА В КОВШЕ ГОРНОГО ПОГРУЗОЧНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2595018C2 |
| DE 19941799 A1, 15.06.2000 | |||
| КОВШ ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 2014 |
|
RU2541321C1 |
| Приспособление для мойки котлов | 1930 |
|
SU24566A1 |

