Изобретение относится к горной промышленности и может быть использовано для разработки сложноструктурных пластообразных месторождений с малым углом падения, сложенных плотными и полускальными горными породами.
Известно устройство для рыхления и удаления частиц грунта, снега и льда с дорожных покрытий [1], включающее тяговую раму, на которой установлены бульдозерный отвал, рыхлитель-кирковщик с вибратором, автогрейдерный отвал, и обеспечивающее возможность одновременной работы рабочих органов.
Недостатком устройства является необходимость применения дополнительного оборудования для погрузки грунта, разрыхленного рыхлителем-кирковщиком и перемещенного автогрейдерным отвалом, в транспортное средство.
Известен способ открытой разработки полезных ископаемых и бульдозерное оборудование [2], заключающийся в послойной отработке и перемещении горной массы с помощью бульдозерного оборудования, состоящего из отвала в виде двух лобовых листов, установленных со смещением относительно друг друга, и скребкового конвейера, установленного между лобовыми листами.
Недостатком способа является невозможность вести предлагаемым бульдозерным оборудованием разработку относительно прочных горных пород.
Известно устройство для разработки прочных горных пород [3], включающее базовую машину с активным механическим рыхлителем и роторный рабочий орган с транспортером на отдельной раме, шарнирно связанной с базовой машиной. Устройство ведет послойное рыхление горных пород, выемку и погрузку горной массы на транспортное средство.
Недостатком устройства являются большие габариты и металлоемкость, что усложняет маневрирование устройства на рабочей площадке и снижает его производительность.
Наиболее близким по технической сущности является выемочно-транспортирующее устройство для разработки горных пород, включающее отработку массива выемочно-транспортирующим агрегатом на базовом шасси с послойным рыхлением массива активным механическим рыхлителем, управляемым гидроцилиндрами, с зубьями, закрепленными на расстоянии по всей длине рабочей зоны активного механического рыхлителя и снабженными ударниками, срезанием разрыхленной горной массы ножом и продвижением горной массы по ножу [4].
Недостатком выемочно-транспортирующего устройства, является то, что компоновка основных рабочих органов конструкции располагается вне зоны тяговой установки и ведет к увеличению металлоемкости и габаритам, что усложняет маневрирование горного оборудования на рабочей площадке, снижает его производительность и производственную безопасность.
Технический результат заключается в повышении производительности и технологической эффективности при селективной выемке горных пород сложноструктурного месторождения за счет изменения компоновочной схемы горного оборудования, оснащения надежными элементами интенсификации погрузки и установки системы автоматизированного управления процессом.
Технический результат достигается тем, что в способе селективной разработки сложноструктурных месторождений твердых полезных ископаемых, включающем отработку массива выемочно-транспортирующим агрегатом на базовом шасси с послойным рыхлением массива активным механическим рыхлителем, управляемым гидроцилиндрами, с зубьями, закрепленными на расстоянии по всей длине рабочей зоны активного механического рыхлителя и снабженными ударниками, срезанием разрыхленной горной массы ножом и продвижением горной массы по ножу, выемочно-транспортирующий агрегат ведет последовательную селективную выемку пласта полезного ископаемого и пропластка пустой породы посредством активного механического рыхлителя, установленного в передней части выемочно-транспортирующего агрегата и снабженного датчиками для распознавания границы пласта полезного ископаемого и пропластка пустой породы, связанными с системой автоматизированного управления, обеспечивающей оптимизацию технологических параметров выемки - глубины рыхления и интенсивности воздействия ударников с учетом физико-механических характеристик горных пород, причем ударники зубьев имеют гидравлический привод, при этом нож оснащен вибратором для интенсификации перемещения горной массы на транспортер, осуществляющий непрерывную загрузку в транспортное средство, а нож и транспортер установлены на подъемной раме, управляемой параллелограммной подвеской с гидроцилиндрами.
Возможность формирования требуемой последовательности выполняемых действий предложенными средствами позволяет решить поставленную задачу, определяет новизну, промышленную применимость и изобретательский уровень разработки.
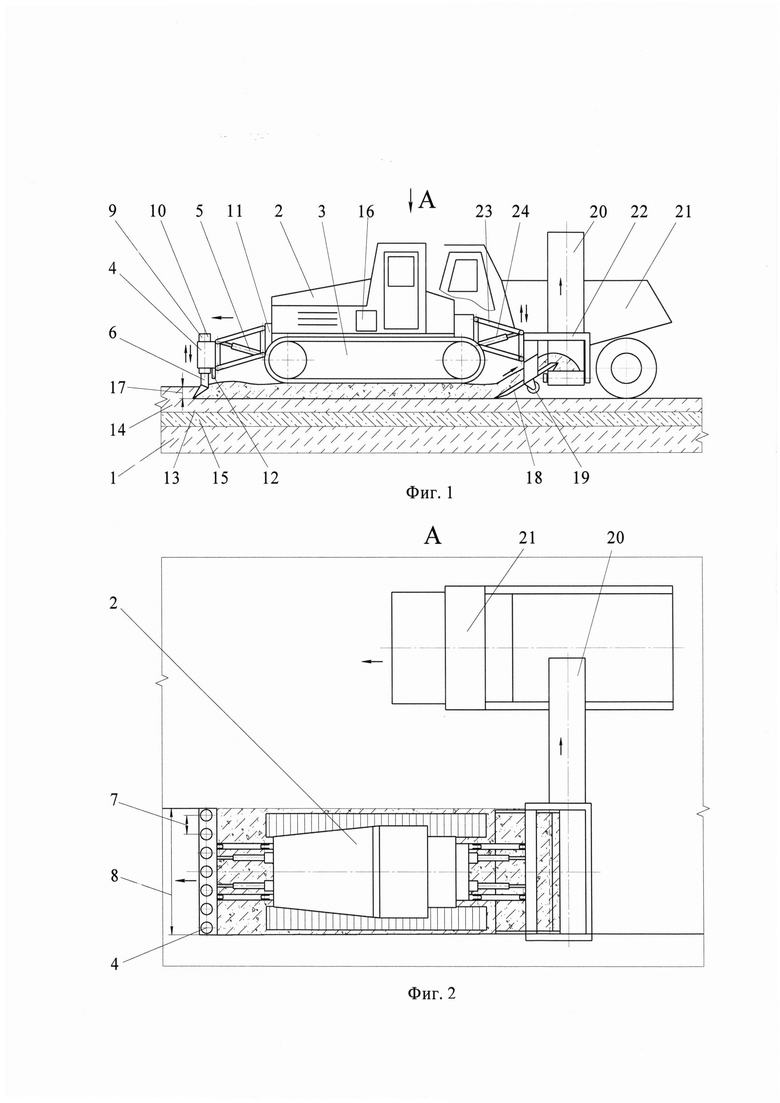
На фиг. 1 - общий вид выемочно-транспортирующего агрегата при разработке сложноструктурного месторождения; на фиг. 2 - вид А на фиг. 1.
Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых включает отработку массива 1 выемочно-транспортирующим агрегатом 2 на базовом шасси 3. Активный механический рыхлитель 4 управляется гидроцилиндрами 5 и оснащен зубьями 6, закрепленными на расстоянии 7 по всей длине рабочей зоны 8. Зубья 6 снабжены ударниками 9 с гидравлическим приводом 10. Активный механический рыхлитель 4 установлен в передней части 11 выемочно-транспортирующего агрегата 2 и снабжен датчиками 12 для распознавания границы 13 пласта полезного ископаемого 14 и пропластка пустой породы 15. Датчики 12 связаны с системой автоматизированного управления 16, обеспечивающей оптимизацию технологических параметров выемки - глубины рыхления 17 и интенсивности воздействия ударников 9. Нож 18 оснащен вибратором 19 для интенсификации перемещения горной массы на транспортер 20, обеспечивающий непрерывную загрузку в транспортное средство 21. Нож 18 и транспортер 20 установлены на подъемной раме 22, управляемой параллелограммной подвеской 23 с гидроцилиндрами 24 для стабилизации положения ножа 18 при изменении глубины рыхления 17.
Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых осуществляется следующим образом.
Ведется отработка сложноструктурного месторождения твердых полезных ископаемых выемочно-транспортирующим агрегатом 2 на базовом шасси 3 с послойным рыхлением массива 1 активным механическим рыхлителем 4, управляемым гидроцилиндрами 5, с зубьями 6, закрепленными на расстоянии 7 по всей длине рабочей зоны 8 активного механического рыхлителя 4 и снабженными ударниками 9 с гидравлическим приводом 10. Датчики 12 связаны с системой автоматизированного управления 16, обеспечивающей оптимизацию технологических параметров выемки - глубины рыхления 17 и интенсивности воздействия ударников 9 с учетом физико-механических характеристик горных пород. Выемочно-транспортирующий агрегат 2 ведет последовательную селективную выемку пласта полезного ископаемого 14 и пропластка пустой породы 15 посредством активного механического рыхлителя 4, установленного в передней части 11 выемочно-транспортирующего агрегата 2 и снабженного датчиками 12 для распознавания границы 13 пласта полезного ископаемого 14 и пропластка пустой породы 15. Осуществляется срезание разрыхленной горной массы ножом 18 и продвижение горной массы по ножу 18. Посредством системы автоматизированного управления параллелограммной подвеской 23 с помощью гидроцилиндров 24 стабилизируется положение подъемной рамы 22 с ножом 18 с учетом глубины рыхления 17. Нож 18 оснащен вибратором 19 для интенсификации перемещения горной массы на транспортер 20, осуществляющий непрерывную загрузку в транспортное средство 21.
Способ повышает производственную безопасность, обеспечивает увеличение производительности и технологической эффективности селективной выемки горных пород сложноструктурного месторождения за счет изменения компоновочной схемы горного оборудования, оснащения элементами интенсификации погрузки и установки системы автоматизированного управления процессом.
Источники информации:
1. Патент РФ №2321705 от 10.04.2008. Устройство для рыхления и удаления частиц грунта, снега и льда с дорожных покрытий.
2. Патент РФ №2077637 от 20.04.1997. Способ открытой разработки полезных ископаемых и бульдозерное оборудование.
3. Патент РФ №2283926 от 20.09.2006. Устройство для разработки прочных горных пород.
4. Патент РФ №2278928 от 27.06.2006. Выемочно-транспортирующее устройство для разработки горных пород.
Изобретение относится к горной промышленности и может быть использовано для разработки сложноструктурных пластообразных месторождений с малым углом падения, сложенных плотными и полускальными горными породами. Технический результат заключается в повышении производительности и технологической эффективности при селективной выемке горных пород сложноструктурного месторождения за счет изменения компоновочной схемы горного оборудования, оснащения надежными элементами интенсификации погрузки и установки системы автоматизированного управления процессом. Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых включает последовательную селективную выемку пласта полезного ископаемого и пропластка пустой породы посредством активного механического рыхлителя, установленного в передней части выемочно-транспортирующего агрегата. Выемочно-транспортирующий агрегат снабжен датчиками для распознавания границы пласта полезного ископаемого и пропластка пустой породы, связанными с системой автоматизированного управления, обеспечивающей оптимизацию технологических параметров выемки - глубины рыхления и интенсивности воздействия ударников с учетом физико-механических характеристик горных пород. Нож оснащен вибратором для интенсификации перемещения горной массы на транспортер, осуществляющий непрерывную загрузку в транспортное средство. 2 ил.
Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых, включающий отработку массива выемочно-транспортирующим агрегатом на базовом шасси с послойным рыхлением массива активным механическим рыхлителем, управляемым гидроцилиндрами, с зубьями, закрепленными на расстоянии по всей длине рабочей зоны активного механического рыхлителя и снабженными ударниками, срезанием разрыхленной горной массы ножом и продвижением горной массы по ножу, отличающийся тем, что выемочно-транспортирующий агрегат ведет последовательную селективную выемку пласта полезного ископаемого и пропластка пустой породы посредством активного механического рыхлителя, установленного в передней части выемочно-транспортирующего агрегата и снабженного датчиками для распознавания границы пласта полезного ископаемого и пропластка пустой породы, связанными с системой автоматизированного управления, обеспечивающей оптимизацию технологических параметров выемки - глубины рыхления и интенсивности воздействия ударников с учетом физико-механических характеристик горных пород, причем ударники зубьев имеют гидравлический привод, при этом нож оснащен вибратором для интенсификации перемещения горной массы на транспортер, осуществляющий непрерывную загрузку в транспортное средство, а нож и транспортер установлены на подъемной раме, управляемой параллелограммной подвеской с гидроцилиндрами.
| ВЫЕМОЧНО-ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ГОРНЫХ ПОРОД | 2004 |
|
RU2278928C1 |
| Способ послойной разработки сложноструктурных месторождений твердых полезных ископаемых | 2018 |
|
RU2683293C1 |
| Способ открытой разработки сложноструктурных месторождений твердых полезных ископаемых | 2018 |
|
RU2687213C1 |
| СПОСОБ ПОСЛОЙНОЙ РАЗРАБОТКИ СЛОЖНОСТРУКТУРНЫХ МЕСТОРОЖДЕНИЙ ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2016 |
|
RU2634150C1 |
| Способ селективной разработки сложноструктурных месторождений твердых полезных ископаемых | 2018 |
|
RU2687719C1 |
| DE 19941799 A, 15.06.2000. | |||

