Изобретение относится к авиационной технике, в частности к беспилотным аппаратам вертолетного типа, входящим в состав робототехнических и дистанционно управляемых комплексов, предназначенных для выполнения различного вида работ в труднодоступных или опасных для здоровья человека условиях, например, для контроля состояния или выполнения ремонтных работ на линиях электропередач, в местах с высоким фоном радиоактивных излучений и др.
Во всех таких случаях летно-подъемное средство, точнее двигатели летно-подъемного средства, используются только для перемещения в пространстве с изменением высоты, направления, скорости перемещения. При этом перемещение в пространстве может быть лишь таким - из точки А в точку В (перемещение груза) [1], либо выполнение каких-либо действий во время полета, связанных с изменением высоты, скорости и направления полета, например, для видеонаблюдения и радиационной разведки местности [2]. Управление перемещением при этом может быть как программным, интерактивным, так и ручным (кнопочным), осуществляемым с пульта управления.
В некоторых случаях в процессе выполнения работы необходимо производить посадки на различные объекты, во время которых транспортируемое летно-подъемным средством исполнительное устройство и производит необходимые действия, связанные с поставленной задачей. При этом летно-подъемное средство и исполнительный блок соединены между собой и составляют единое целое, а исполнительный блок содержит все необходимые для выполнения задачи рабочие органы, в том числе и силовые приводы для этих органов. Примером таких устройств может служить устройство для диагностики воздушных линий электропередач [3]. В этом устройстве (принятом за прототип) летно-подъемное средство доставляет исполнительный блок к месту работы (на грозозащитный канат ЛЭП), устанавливает его на канате. Затем исполнительный блок выполняет свою задачу, связанную с контролем состояния каната, перемещаясь от одной опоры ЛЭП до другой. После этого летно-подъемное устройство взлетает и переносит исполнительный блок через опору для контроля следующего каната и так далее.
Рабочим органом, выполняющим контрольно-диагностическую операцию в исполнительном блоке устройства для диагностики воздушных линий электропередач может являться, например, магнитная головка магнитного дефектоскопа, которая при посадке на канат должна раскрыться, а затем - для выполнения контроля - закрыться, охватив канат. Затем, перемещаясь по канату до следующей опоры, выполнить контроль его состояния. По окончанию контроля, головка должна раскрыться для того, чтобы летно-подъемное средство смогло снять исполнительный блок с каната и перенести его за опору.
Для раскрытия и закрытия магнитной головки, как правило, она снабжена специальным электроприводом. Наличие электропривода для раскрытия-закрытия магнитной головки не только усложняет конструкцию устройства в целом, но и увеличивает вероятность отказа в его работе. В случае отказа электропривода при закрытой (замкнутой) магнитной головке летно-подъемное средство не сможет снять исполнительный блок с каната. В таком случае для удаления всего устройства с каната необходимо будет выполнить довольно трудоемкие и длительные работы по раскрытию или ремонту привода раскрытия на высоте магнитной головки, для чего потребуется в том числе отключение ЛЭП.
Целью предлагаемого изобретения является упрощение конструкции, повышение надежности и безопасности работы робототехнических и дистанционно-управляемых комплексов, в состав которых входит летно-подъемные средства вертолетного типа.
Поставленная цель достигается тем, что для привода в действие рабочих органов исполнительных блоков используется тяговая сила двигателей или сила тяжести летно-подъемного средства, возникающие при взлете или при посадке соответственно.
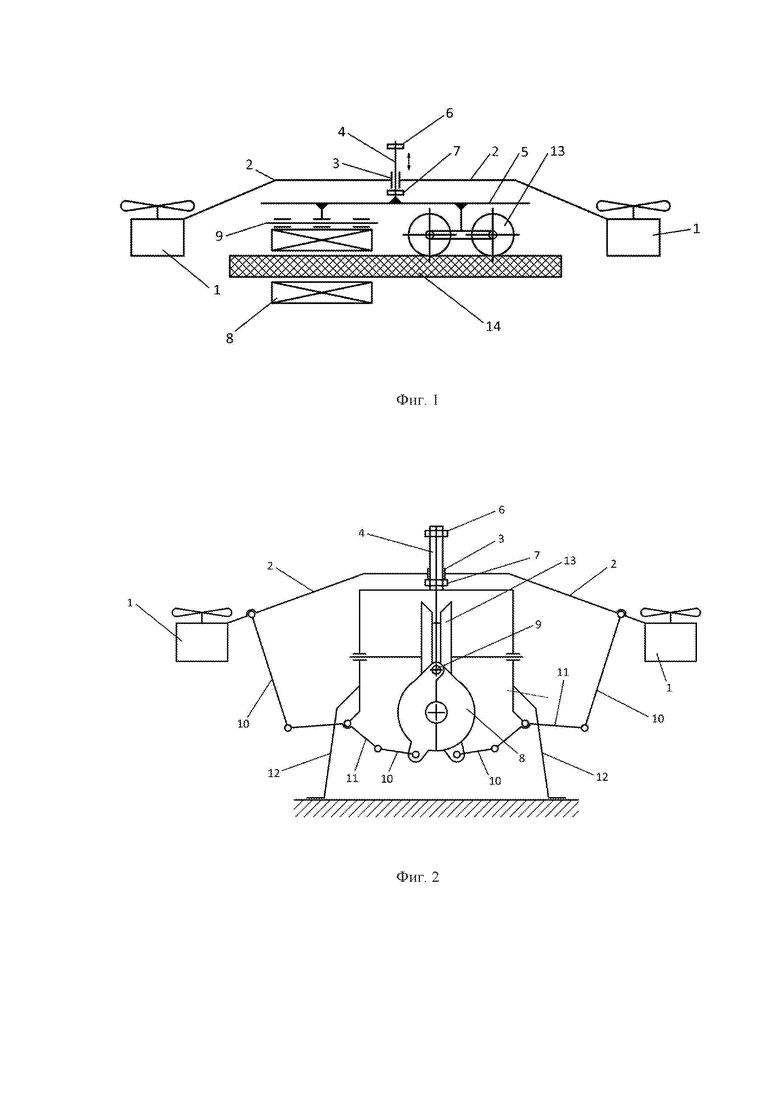
Сущность способа поясняется устройством для дистанционного контроля грозозащитного каната линии электропередач, представленном на чертежах 1-4, где:
Фиг. 1 - продольный разрез устройства;
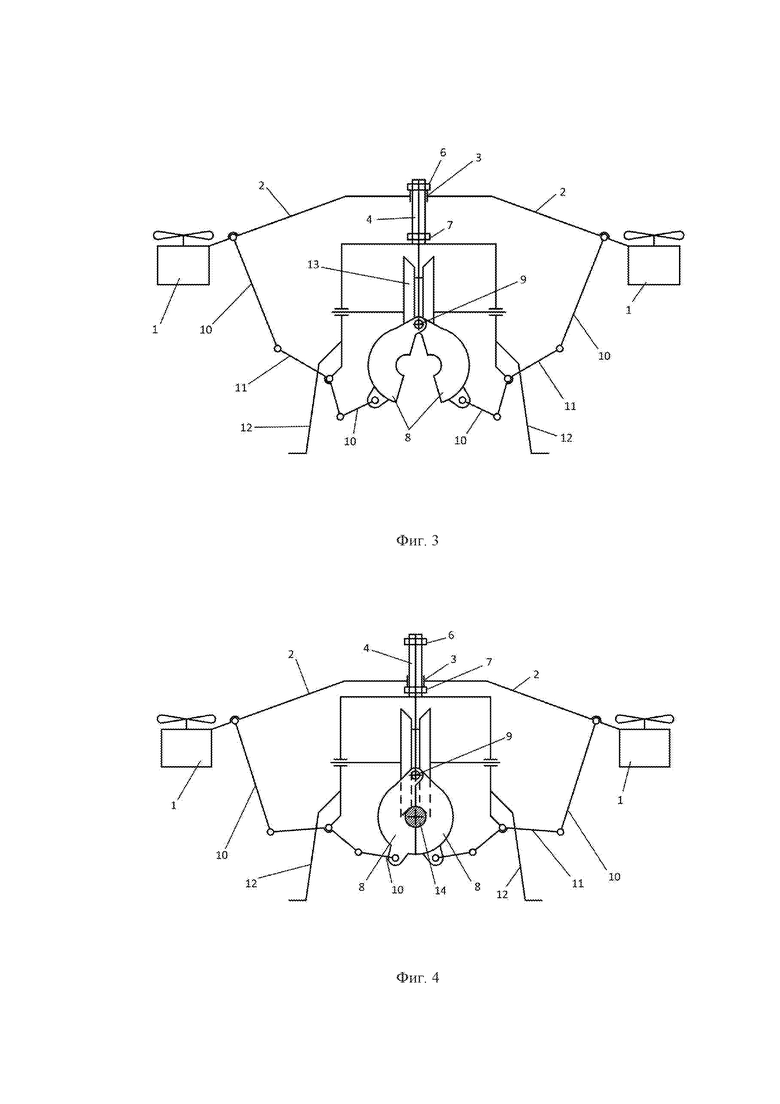
Фиг. 2 - устройство дистанционного выполнения работ в исходном состоянии «на земле»;
Фиг. 3 - устройство дистанционного выполнения работ «в полете»;
Фиг. 4 - устройство дистанционного выполнения работ «на канате».
Устройство состоит из летно-подъемного средства с двигателями 1, укрепленными на раме 2, оснащенной втулкой 3. Втулка 3 посажена с возможностью перемещения по направляющей 4, укрепленной на исполнительном блоке 5. Ось втулки совпадает с вертикалью, проходящей через центр масс исполнительного блока. Вверху и у основания направляющей 4 установлены регулируемые верхний 6 и нижний 7 упоры соответственно. Исполнительный блок 5 снабжен рабочим органом 8 -магнитной головкой магнитного дефектоскопа, представляющей из себя цилиндр (магнитопровод), состоящий из двух полуцилиндров, соединенных между собой осью 9.
Полуцилиндры магнитной головки с помощью тяг 10 и угловых рычагов 11 соединены с рамой 2 летно-подъемного средства.
Кроме того, исполнительный блок 5 снабжен опорами 12 и колесным транспортным средством 13 для перемещения его по канату 14.
В исходном положении «на земле» (фиг. 1), исполнительный блок 5 стоит «на земле», опираясь опорами 12. Втулка 3 совместно с рамой 2 летно-подъемного средства под действием силы тяжести находятся в нижнем положении у регулируемого упора 7. Магнитопровод магнитной головки 8 (рабочего органа) находится в замкнутом положении.
При включении двигателей 1 летно-подъемного средства, рама 2 совместно со втулкой 3 начинают подниматься вверх по направляющей 4 к регулируемому верхнему упору 6. При перемещении рамы 2 вверх тяги 10 и рычаги 11 раскрывают магнитную головку 8. Когда втулка 3 упрется в регулируемый верхний упор 6, начинается подъем и транспортировка исполнительного блока 5 на грозозащитный канат 14 (фиг. 3).
При посадке на канат 14 (фиг. 4) раскрытая магнитная головка 8 опускается, канат входит внутрь головки до упора в ее верхнюю часть с узким раскрытием (меньше диаметра каната). Одновременно на канат 14 опираются колеса транспортного средства 13, исполнительный блок 5 прекращает опускаться, а летно-подъемное средство под действием силы тяжести продолжает опускаться, происходит закрывание магнитной головки (силы качения полуцилиндров), а втулка 3 подходит к нижнему упору 7. Исполнительный блок 5 готов к выполнению контроля каната 14. По завершению контроля, осуществляемого путем перемещения магнитной головки 8 по всей длине каната 14 колесным транспортным средством 13, включаются двигатели летно-подъемного средства, при этом летно-подъемное средство начинает подниматься вверх (втулка 3 скользит по направляющей 4), а тяги 10 и рычаги 11 раскрывают магнитную головку 8. Втулка 3 упирается в верхний регулируемый упор 6 и начинается подъем исполнительного блока 5 для перестановки на новое рабочее место.
В случае возникновения какой-либо неисправности, например, даже при потере питания двигателей летно-подъемного средства, устройство легко может быть удалено с грозозащитного каната путем поднятия его вверх за раму 2 летно-подъемного средства.
По предлагаемому способу и устройству для его осуществления для открытия рабочего органа устройства дистанционного выполнения работ при взлете используется подъемная сила двигателей летно-подъемного средства, а при посадке - для закрытия исполнительного органа - сила тяжести этого средства, которая воздействует на рабочий орган посредством перемещения летно-подъемного средства и исполнительного блока относительно друг друга.
Преимуществами предлагаемого способа и устройства для его осуществления являются:
- упрощение конструкции;
- повышение надежности работы;
- повышение безопасности работы.
Библиография.
1. Описание изобретения к патенту РФ №2390468.
2. Описание изобретения к патенту РФ №2223803.
3. Описание изобретения к патенту РФ №2558002.
Изобретение относится к авиационной технике, в частности к беспилотным аппаратам для контроля состояния или выполнения ремонтных работ на линиях электропередач. Способ захвата провода линии электропередач рабочим органом исполнительного блока устройства для дистанционного контроля, оснащенного для доставки его к месту работы летно-подъемным средством, включает открытие рабочего органа - магнитной головки - при взлете, используя подъемную силу летно-подъемного средства, при посадке на провод для закрытия магнитной головки - силу тяжести летно-подъемного средства, воздействующие на механизм открытия-закрытия в результате перемещений летно-подъемного средства относительно исполнительного блока. Устройство контроля линий электропередач включает летно-подъемное средство, исполнительный блок, содержащий средство для перемещения по канату и рабочий орган, например магнитную головку магнитного дефектоскопа, систему тяг и рычагов, втулку, сидящую на направляющей исполнительного блока с возможностью скольжения по ней. Обеспечивается повышение надежности и безопасности работы робототехнических дистанционно-управляемых комплексов. 2 н.п. ф-лы, 4 ил.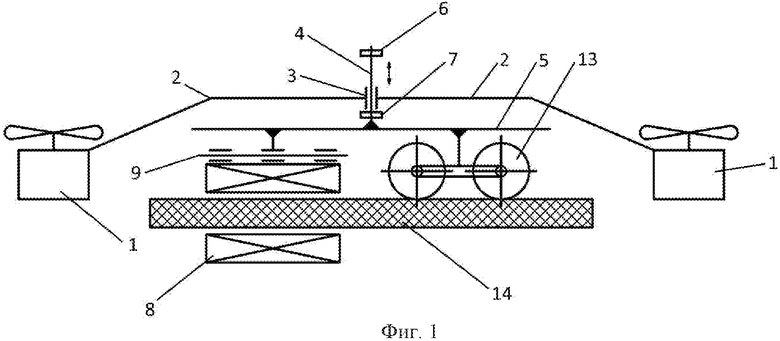
1. Способ захвата провода линии электропередач рабочим органом исполнительного блока устройства для дистанционного контроля, оснащенного для доставки его к месту работы летно-подъемным средством, отличающийся тем, что для открытия рабочего органа - магнитной головки - при взлете используют подъемную силу летно-подъемного средства, при посадке на провод для закрытия магнитной головки - силу тяжести летно-подъемного средства, воздействующие на механизм открытия-закрытия в результате перемещений летно-подъемного средства относительно исполнительного блока.
2. Устройство для дистанционного контроля линий электропередач, включающее летно-подъемное средство, исполнительный блок, содержащий средство для перемещения по канату и рабочий орган - магнитную головку магнитного дефектоскопа, отличающееся тем, что летно-подъемное средство снабжено системой связанных с магнитной головкой тяг и рычагов, втулкой, сидящей на направляющей исполнительного блока с возможностью скольжения по ней, при этом направляющая снабжена в верхней части и у основания регулируемыми упорами - ограничителями величины хода летно-подъемного средства относительно исполнительного блока, а ось направляющей совпадает с вертикалью, проходящей через центр масс исполнительного блока.
| US 20170015415 A1, 19.01.2017 | |||
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| US 20060114122 A1, 01.06.2006 | |||
| US 20110196535 A1, 11.08.2011 | |||
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |

