Изобретение относится к электроэнергетике и может быть использовано для диагностики и локации дефектов в изоляции линий электропередачи, отклонения опор от вертикального положения, электрических пробоев и механических разрушений элементов изоляторов; для контроля уровня топлива, масла, температуры, охлаждающих жидкостей и т.д. Устройство может быть применено для отслеживания работоспособности альтернативных источников электроэнергии.
Известно устройство для диагностики воздушных линий электропередач (патент РФ 2558002, опубл. 27,07,2015), содержащее летательный аппарат вертолетного типа, систему управления, устройства контроля воздушных линий электропередач, подключенные к аккумулятору, размещенную в корпусе и соединенную с двигателем систему привода, выполненную с возможностью фиксации положения устройства для диагностики относительно грозозащитного троса или силового провода и обеспечения его перемещения вдоль и вблизи воздушных линий электропередач, при этом летательный аппарат вертолетного типа подключен к аккумулятору, включает систему управления и прикреплен к корпусу с внешней стороны, причем корпус дополнительно снабжен направляющими, выполненными с возможностью задания траектории движения грозозащитного троса или силового провода внутри устройства для диагностики воздушных линий электропередач до положения, позволяющего фиксировать устройство для диагностики воздушных линий электропередач на грозозащитном тросе или силовом проводе.
Недостаток состоит в том, что, если рабочим органом, выполняющим контрольно-диагностическую операцию, является магнитная головка магнитного дефектоскопа, которая при посадке на канат должна быть раскрыта, а затем - для выполнения контроля - должна закрыться, охватив канат. Затем, перемещаясь по канату до следующей опоры, выполнить контроль его состояния. По окончанию контроля, головка должна раскрыться для того, чтобы летно-подъемное средство смогло снять исполнительный блок с каната и перенести его за опору. Для раскрытия и закрытия магнитной головки используют дополнительный электропривод. Наличие электропривода для раскрытия-закрытия магнитной головки не только усложняет конструкцию устройства в целом, но и уменьшает надежность всего устройства. В случае отказа электропривода при закрытой (замкнутой) магнитной головке летно-подъемное средство не сможет снять исполнительный блок с каната. В таком случае для удаления всего устройства с каната необходимо будет выполнить довольно трудоемкие и длительные работы по раскрытию или ремонту привода раскрытия магнитной головки на высоте, для чего потребуется в том числе отключение ЛЭП.
Известен Способ захвата провода линии электропередач рабочим органом исполнительного блока устройства для дистанционного контроля, оснащенного для его доставки к месту работы летно-подъемным средством, и устройство для его осуществления (патент РФ № 2683417, опубл. 28.03.2019), включающее летно-подъемное средство, исполнительный блок, содержащий средство для перемещения по канату и рабочий орган -магнитную головку магнитного дефектоскопа, причем летно-подъемное средство снабжено системой связанных с магнитной головкой тяг и рычагов, втулкой, сидящей на направляющей исполнительного блока с возможностью скольжения по ней, при этом направляющая снабжена в верхней части и у основания регулируемыми упорами - ограничителями величины хода летно-подъемного средства относительно исполнительного блока, а ось направляющей совпадает с вертикалью, проходящей через центр масс исполнительного блока.
Известно устройство для диагностики воздушных линий электропередач (заявка US 20060114122, опубл, 15.05.2003), которое содержит систему управления, устройства контроля воздушных линий электропередач, подключенные к аккумулятору, размещенную в корпусе и соединенную с двигателем систему привода, выполненную с возможностью фиксации положения устройства для диагностики относительно грозозащитного троса или силового провода и обеспечения его перемещения вдоль и вблизи воздушных линий электропередач. Причем дополнительно устройство для диагностики воздушных линий электропередач содержит летательный аппарат вертолетного типа, подключенный к аккумулятору, включающий систему управления и прикрепленный к корпусу с внешней стороны.
Недостатком устройства является сложность первоначальной установки устройств для диагностики воздушных линий электропередач на грозозащитном тросе или силовом проводе в связи с отсутствием элементов, обеспечивающих задание траектории движения грозозащитного троса или силового провода соответственно внутри устройства для диагностики.
Известно устройство для диагностики протяжённых объектов энергетики (патент RU № 169167, опубл. 03.07.2017), позволяющей проводить диагностику протяженных объектов энергетики, преимущественно воздушных линий электропередачи, на высотах менее 50 метров с привязкой к диагностируемому объекту и при этом не зависящее от параметров электромагнитного поля диагностируемого объекта, а применение блока навигации (GPS/ГЛОНАСС-навигаторов) свести к дублированию функций основной навигации.
Недостатками устройства являются неподвижный блок измерительной аппаратуры, что уменьшает диапазон исследуемого объекта, отсутствие фиксации устройства на заданном месте для более детальной диагностики области наблюдения, а также малая номенклатура измерительной аппаратуры (линейный лазер и видеокамера), не позволяющая всесторонне изучить область наблюдения.
Известен комплекс авианаблюдения (патент РФ № 2232104, опубл. 10.07.2004) принятый за прототип, содержащий беспилотный летательный аппарат с электродвигателями и воздушными винтами, радиоуправляемой бортовой системой обеспечения полета, бортовой приемопередающей аппаратурой и устройством видеонаблюдения в видимом и инфракрасном спектре с передатчиком изображения, а также мобильный пульт контроля и управления с наземной приемопередающей аппаратурой, приемником видеоданных и радионавигационной системой управления беспилотным летательным аппаратом, при этом радиоуправляемая бортовая система обеспечения полета беспилотного летательного аппарата и радионавигационная система управления беспилотным летательным аппаратом снабжены корректируемыми посредством глобальной навигационной системы инерциальными блоками с микромеханическими вибрационными гироскопами - акселерометрами.
Недостатками комплекса является малая устойчивость и динамичность беспилотных летательных аппаратов в режиме полета и в режиме «зависания» по причине использования только четырех электродвигателей в конструкции винтовой вертикально взлетающей платформы летательных аппаратов, что существенно затрудняет проводить экологический мониторинг с помощью его, а также наличие дополнительных расходов электроэнергии вследствие использования для управления движением взлетающей платформы двух рулевых машинок, которые изменяют вектор тяги каждого воздушного винта с электродвигателем относительно корпуса беспилотного летательного аппарата.
Техническим результатом является повышение эффективности дистанционного мониторинга объектов электроэнергетики и электроснабжения.
Технический результат достигается тем, что узел управления, выполнен в форме квадрата со скошенными углами, сверху на него установлена с возможностью съема крышка в форме квадрата со скошенными углами, в центре задней части корпуса узла управления установлен разъем для зарядки, выход которого соединен с входом аккумуляторной батареи, и стойки крепления двигателей выполнены единой конструкцией, на концах стоек крепления двигателей установлены не менее четырех коллекторных электродвигателей, при этом внутри стоек крепления двигателя выполнены полости, в которых закреплены проводники, которые соединяют коллекторные электродвигатели с управляющим микроконтроллером, внутри корпуса узла управления выполнена полость в форме параллелепипеда, внутри которой установлен управляющий микроконтроллер, вход которого соединен с выходом аккумуляторной батареи, с выходом антенны и выходом модуля спутниковой навигации, а вход антенны соединен с выходом микроконтроллера, вход модуля спутниковой навигации соединен с выходом управляющий микроконтроллера, в верхней части посадочных опор выполнено резьбовое соединение, которое закрепляется с возможностью съема снизу к стойкам крепления двигателей, снизу корпуса узла управления установлен приборный отсек, который выполнен в форме сферы, внутри которого выполнена полость, в которую установлены ультрафиолетовый дефектоскоп, тепловизионная камера, видеокамера высокого разрешения и лазерный дальномер, выходы которых соединены со входом управляющего микроконтроллера, при этом объектив видеокамеры высокого разрешения установлен в отверстие, которое выполнено в нижней части корпуса, а диаметр чуть меньше половины высоты корпуса приборного отсека, объективы ультрафиолетового дефектоскопа и тепловизионной камеры в отверстия которые, выполнены в верхней части корпуса на равном расстоянии друг от друга, а объектив для лазерного дальномера установлен в отверстие, которое выполнено в центре корпуса, объективы закреплены с возможностью съема креплениями, которые установлены на внутренней поверхности корпуса приборного отсека.
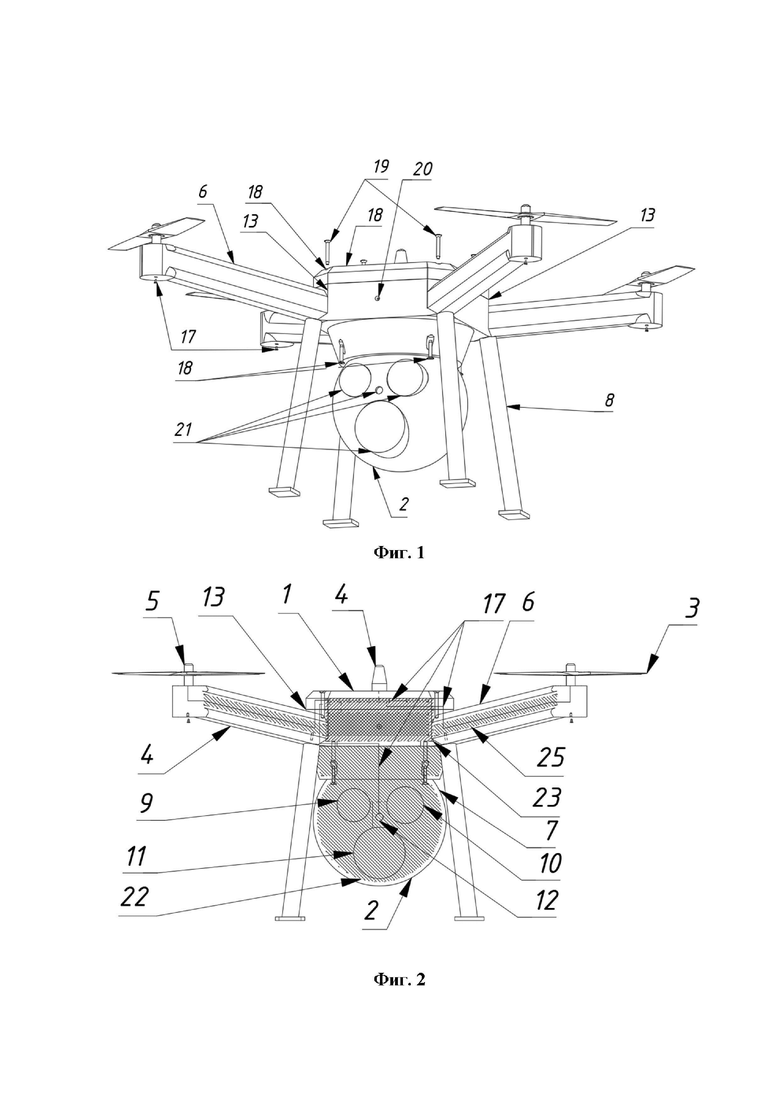
Устройство для дистанционной диагностики объектов электроэнергетики поясняется следующими фигурами:
фиг. 1 - общий вид устройства;
фиг. 2 - общий вид устройства спереди,
фиг. 3 - вид сверху,
фиг. 4 - изображение посадочной опоры, где:
1 - узел управления;
2 - приборный отсек;
3 - двухлопастной винт;
4 - антенна;
5 - коллекторный электродвигатель;
6 - стойка крепления двигателя;
7 - корпус приборного отсека;
8 - посадочная опора;
9 - ультрафиолетовый дефектоскоп;
10 - тепловизионная камера;
11 - видеокамера высокого разрешения;
12 - лазерный дальномер;
13 - корпус узла управления;
14 - аккумуляторная батарея;
15 - модуль спутниковой навигации;
16 - управляющий микроконтроллер;
17 - проводники;
18 - крышка;
19 - крепежный элемент;
20 - разъем для зарядки;
21 - отверстия для объективов;
22 - полость корпуса приборного отсека;
23 - полость корпуса узла управления;
24 - резьбовое соединение;
25 - полость внутри стойки крепления двигателя.
Устройство для дистанционного мониторинга объектов электроэнергетики включает узел управления 1 (фиг. 2) и стойки крепления двигателей 6. Корпус узла управления 13 (фиг. 1) выполнен в форме квадрата со скошенными углами, и стойки крепления двигателей 6, выполненные единой конструкцией из ударопрочного поликарбоната контрастного цвета, например красного. Внутри корпуса узла управления 13 выполнена полость корпуса узла управления 23 (фиг. 3) в форме параллелепипеда. В полость корпуса узла управления 23 установлен управляющий микроконтроллер 16 (фиг. 3), вход которого соединен с выходом антенны 4, а вход антенны 4 соединен с выходом микроконтроллера 16. Вход управляющего микроконтроллера 16 соединен с выходом модуля спутниковой навигации 15, вход модуля спутниковой навигации 15 соединен с выходом управляющий микроконтроллера 16. Вход управляющего микроконтроллера 16 соединен с выходом аккумуляторной батареи 14 (фиг. 3), например литий-ионной, проводниками 17. Посадочные опоры 8 (фиг. 1, 4) сделаны из ударопрочного поликарбоната контрастного цвета, например белого, в их верхней части выполнено резьбовое соединение 24 (фиг. 4), которое крепится с возможностью съема снизу к стойкам крепления двигателей 6 (фиг. 1, 2). На концах стоек крепления двигателей 6 установлены не менее четырех коллекторных электродвигателей 5 (фиг. 2). Внутри стоек крепления двигателя 6 выполнены полости стойки крепления двигателя 25 (фиг. 2), в которых закреплены проводники 17, соединяющие коллекторные электродвигатели 5 с управляющим микроконтроллером 16 (фиг. 3). На коллекторных электродвигателях 5 (фиг. 2, 3) установлены не менее четырех двухлопастных винтов 3 (фиг. 2, 3), изготовленных из углепластика или стеклопластика. Крышка 18 (фиг.1) выполнена в форме квадрата со скошенными углами из ударопрочного поликарбоната контрастного цвета, например желтого. Крышка 18 устанавливается сверху, с возможностью съема на корпус узла управления 13 (фиг. 1, 2). В центре задней части корпуса узла управления 13 установлен разъем для зарядки 20 (фиг. 1), выход которого через проводник 17 (фиг. 3) соединен с входом аккумуляторной батареи 14 (фиг. 3). Снизу корпуса узла управления 13 (фиг. 1) закреплен приборный отсек 2 (фиг. 1), корпус приборного отсека 7 (фиг. 2), выполненный в форме сферы и изготовленный из ударопрочного поликарбоната контрастного цвета, например голубого. Внутри корпуса приборного отсека 7 выполнена полость корпуса приборного отсека 22 (фиг. 2), в которую установлены ультрафиолетовый дефектоскоп 9 (фиг. 2), тепловизионная камера 10 (фиг. 2), видеокамера высокого разрешения 11 (фиг. 2) и лазерный дальномер 12 (фиг. 2), выходы которых соединены проводниками 17 с входом управляющего микроконтроллера 16. Объективы ультрафиолетового дефектоскопа 9 (фиг. 1), тепловизионной камер 10, видеокамеры высокого разрешения 11 и лазерного дальномера 12 установлены в отверстия 21 (фиг. 1), которые выполнены на передней поверхности корпуса приборного отсека 7, закреплены с возможностью съема креплениями, которые установлены на внутренней поверхности (на фигуре не показаны) корпуса приборного отсека 7. Отверстие для объектива 21 видеокамеры высокого разрешения 11 выполнено в нижней части корпуса приборного отсека 7, диаметром чуть меньше половины высоты корпуса приборного отсека 7. Отверстия для объективов 21 ультрафиолетового дефектоскопа 9 и тепловизионной камеры 10 выполнены в верхней части корпуса приборного отсека 7 на равном расстоянии друг от друга. Отверстие для объектива 21 для лазерного дальномера 12 выполнено в центре корпуса приборного отсека 7.
Устройство для дистанционного мониторинга объектов электроэнергетики работает следующим образом. Команды от оператора через передающее устройство принимаются антенной 4, передающей данные на управляющий микроконтроллер 16 через проводники 17. Управляющий микроконтроллер 16 управляет работой не менее четырех коллекторных электродвигателей 5, передавая управляющий сигнал через проводники 17. Коллекторные электродвигатели 5 вращают двухлопастные винты 3 попарно навстречу друг другу для компенсации реактивного момента и большей стабильности в полете. Управление тангажом и рысканием осуществляется посредством попарной регулировки оборотов двигателей таким образом, что для изменения угла тангажа в положительную или отрицательную сторону передняя пара двигателей увеличивает или уменьшает обороты соответственно. Для поворота по часовой стрелке увеличиваются обороты двигателей, вращающихся также по часовой стрелке, а для поворота против часовой стрелки увеличиваются обороты двигателей, вращающихся против часовой стрелки. Для управления креном применяется регулировка оборотов лишь одного из двигателей таким образом, что для крена по часовой стрелке увеличиваются обороты одного из левых по направлению к носу двигателей, а для крена против часовой стрелки увеличиваются обороты одного из правых двигателей. Под управлением оператора устройство следует в область диагностики. Контроль движения осуществляется с помощью данных модуля спутниковой навигации 15 и визуального контроля полета посредством видеокамеры высокого разрешения 11, передающих сигналы через медные проводники 17 в управляющий микроконтроллер 16, из которого после обработки через медные проводники 17 сигнал попадает в антенну 4 и передаётся на приёмное устройство оператора. При достижении устройством области диагностики, оператор даёт команду на включение лазерного дальномера 12, ультрафиолетового дефектоскопа 9 и тепловизионной камеры 10 и проводит визуальную диагностику. Наводка приборов на цель наблюдения осуществляется с помощью изменения положения всего устройства посредством управления тангажом, креном и рысканием. Применение данных устройств диагностики обеспечивает возможность диагностики объектов электроэнергетики и обнаружения таких явлений как: отклонение опор ЛЭП от вертикали, падение, повреждение, деформация опор, строений, деревьев, мусора в охранных зонах ЛЭП, провисание проводов, обрывы, разрушение элементов стеклянных и фарфоровых изоляторов, пожары, наводнения вблизи элементов энергосетей, места перегрева элементов энергосетей, местные истирания проводов, коронные разряды на линиях воздушной электропередачи, а также составлять трёхмерные модели диагностируемых областей как в режиме высокоскоростного полёта, так и в режиме зависания, без непосредственного участия человека в зоне потенциальной опасности. После завершения диагностики устройство автоматически возвращается на точку старта и осуществляет посадку на посадочные опоры 8. Для лучшей заметности устройства как в процессе полета, так и на земле после приземления или аварии, узлы и агрегаты устройства изготавливаются из контрастных цветов (белый, красный, голубой, желтый). В течение всего времени работы устройства его энергоснабжение обеспечивается аккумуляторной батареей 14. При разрядке аккумуляторной батареи 14 заряд осуществляется её подключением через разъем для зарядки 20 к сети бытового электроснабжения с помощью блока питания.
Устройство для дистанционного мониторинга объектов электроэнергетики позволяет повысить эффективность дистанционного мониторинга объектов электроэнергетики и электроснабжения за счет установки приборного отсека, который содержит модуль спутниковой навигации, а также ультрафиолетовый дефектоскоп, тепловизионную камеру, видеокамеру высокого разрешения и лазерный дальномер, которые соединены с управляющим микроконтроллером. Устройство перемещается в воздухе практически во всех направлениях за счет реактивной силы винтов, вращающихся в горизонтальной плоскости, благодаря этому можно проводить более точное наведения измерительных приборов на цель.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Мобильный комплекс мониторинга открытых участков местности | 2019 |
|
RU2708802C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| СПОСОБ ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ ЗА СОСТОЯНИЕМ ЛИНЕЙНОЙ ЧАСТИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616736C1 |
| Беспилотная система активного противодействия БПЛА | 2017 |
|
RU2669881C1 |
| Мобильный тепловизионный комплекс | 2022 |
|
RU2809472C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2352480C1 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |


Изобретение относится к электроэнергетике и может быть использовано для диагностики и локации дефектов в изоляции линий электропередачи, отклонения опор от вертикального положения, электрических пробоев и механических разрушений элементов изоляторов; для контроля уровня топлива, масла, температуры, охлаждающих жидкостей и т.д. Техническим результатом является повышение качества дистанционного мониторинга объектов электроэнергетики. Устройство для дистанционного мониторинга объектов электроэнергетики содержит модуль спутниковой навигации, а также ультрафиолетовый дефектоскоп, тепловизионную камеру, видеокамеру высокого разрешения и лазерный дальномер, которые соединены с управляющим микроконтроллером, антенну, не менее четырех коллекторных электродвигателей, аккумуляторную батарею, объектив видеокамеры высокого разрешения установлен в отверстие, выполненное в нижней части корпуса, его диаметр чуть меньше половины высоты корпуса приборного отсека, объективы ультрафиолетового дефектоскопа и тепловизионной камеры - в отверстия, которые выполнены в верхней части корпуса на равном расстоянии друг от друга, а объектив для лазерного дальномера установлен в отверстие, которое выполнено в центре. 4 ил.
Устройство для дистанционного мониторинга объектов электроэнергетики, включающее аккумуляторную батарею, антенну, видеокамеру, приборный отсек, отличающееся тем, что корпус узла управления, выполнен в форме квадрата со скошенными углами, сверху на него установлена с возможностью съема крышка, которая выполнена в форме квадрата со скошенными углами, в центре задней части корпуса узла управления установлен разъем для зарядки, выход которого соединен с входом аккумуляторной батареи, и стойки крепления двигателей выполнены единой конструкцией, на концах стоек крепления двигателей установлены не менее четырех коллекторных электродвигателей, при этом внутри стоек крепления двигателя выполнены полости, в которых закреплены проводники, которые соединяют коллекторные электродвигатели с управляющим микроконтроллером, внутри корпуса узла управления выполнена полость в форме параллелепипеда, внутри которой установлен управляющий микроконтроллер, вход которого соединен с выходом аккумуляторной батареи, с выходом антенны и выходом модуля спутниковой навигации, а вход антенны соединен с выходом микроконтроллера, вход модуля спутниковой навигации соединен с выходом управляющего микроконтроллера, в верхней части посадочных опор выполнено резьбовое соединение, которое закрепляется с возможностью съема снизу к стойкам крепления двигателей, снизу корпуса узла управления установлен приборный отсек, который выполнен в форме сферы, внутри которого выполнена полость, в которую установлены ультрафиолетовый дефектоскоп, тепловизионная камера, видеокамера высокого разрешения и лазерный дальномер, выходы которых соединены с входом управляющего микроконтроллера, при этом объектив видеокамеры высокого разрешения установлен в отверстие, которое выполнено в нижней части корпуса, а диаметр чуть меньше половины высоты корпуса приборного отсека, объективы ультрафиолетового дефектоскопа и тепловизионной камеры - в отверстия, которые выполнены в верхней части корпуса на равном расстоянии друг от друга, а объектив для лазерного дальномера установлен в отверстие, которое выполнено в центре корпуса, объективы закреплены с возможностью съема креплениями, которые установлены на внутренней поверхности корпуса приборного отсека.
| СПОСОБ ГАЗОВОГО БОРИРОВАНИЯ МЕТАЛЛИЧЕСКИХ ПОВЕРХНОСТЕЙ | 0 |
|
SU177254A1 |
| Роботизированный комплекс контроля линий электропередач и электроподстанций. | 2021 |
|
RU2748134C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ И ЕГО КОМПОНЕНТ | 2014 |
|
RU2558002C1 |
| WO 2021048201 A1, 18.03.2021 | |||
| US 20190176984 A1, 13.06.2019 | |||
| KR 1020170028114 A, 13.03.2017. | |||

