Изобретение относится к электроэнергетике и может быть использовано для локации дефектов в изоляции воздушных высоковольтных линий электропередачи (ЛЭП), дефектов монтажа проводов и арматуры, набросов на провода и т.д.
Известен способ диагностики высоковольтной воздушной линии электропередачи, основанный на измерении интенсивности электромагнитного излучения в видимой части спектра (Овсянников А.Г., Левичев В.Ю., Сибиряков В.Г. Электронно-оптический дефектоскоп «Филин-3». // Приборы и техника эксперимента. - 1987, №2). Для этого в темное время суток измеряют интенсивность свечения, создаваемого короной на дефектной изоляции высоковольтной линии электропередачи, и сопоставляют с интенсивностью свечения на неповрежденной изоляции. Недостаток такого способа - трудоемкость диагностики, требующая обхода всей линии электропередачи, а также необходимость выполнения измерений в темное время суток.
Известен также способ диагностики высоковольтной воздушной линии электропередачи (принятый в качестве прототипа), который осуществляется путем измерения интенсивности электромагнитного излучения (высокочастотных импульсов) в области частот от сотен кГц до единиц МГц путем вдольтрассового облета линий электропередачи (Дикой В.П., Овсянников А.Г. Электромагнитная аэроинспекция воздушных линий электропередачи. // Электрические станции, №3, 1999). Диагностика и локация повреждений (дефектов) выполняется путем сопоставления (временной привязки) записи видеоизображения линии электропередачи, полученной в процессе облета линии, с участками одновременно записанной осциллограммы, на которых интенсивность электромагнитного высокочастотного излучения имеет повышенное значение. Недостатком этого способа является значительная сложность и трудоемкость его реализации.
Таким образом, анализ современного состояния уровня техники показывает, что задачей изобретения является создание более простого и нетрудоемкого в реализации способа диагностики дефектов на ЛЭП.
Эта задача достигается тем, что в известном способе диагностики высоковольтной воздушной линии электропередачи, основанном на регистрации электрических высокочастотных импульсов вблизи линии электропередачи с помощью измерительной аппаратуры (электромагнитного датчика и подключенного к нему цифрового запоминающего осциллографа) путем вдольтрассового облета линии электропередачи, измерительную аппаратуру перемещают вдоль трассы линии с помощью автоматически управляемого маломерного беспилотного летательного аппарата (БЛА). Для этого в процессе полета измеряют напряженность электрического поля, создаваемого проводами линии, с помощью датчиков, расположенных на концах крыльев БЛА, вычисляют среднее значение напряженности электрического поля Eср=(Eп+Eл)/2 (где Eл и Eп - действующие значения напряженности электрического поля, измеренные на левом и правом концах крыльев) и сравнивают его с наперед заданным значением E0, определяющим вертикальное положение летательного аппарата относительно проводов линии электропередачи. При пилотировании БЛА под проводами линии электропередачи и выполнении условия Eср<E0 посредством системы автоматического пилотирования, находящейся на БЛА, воздействуют на руль высоты и увеличивают ее (т.е. уменьшают расстояние от провода до БЛА). При Eср>E0 высоту уменьшают (увеличивают расстояние от провода до БЛА). Вдольтрассовое положение БЛА автоматически поддерживают, воздействуя на киль, на основе разности измеренных напряженностей электрического поля (ΔE=Eп-Eл). При положительном значении DE воздействуют на киль и смещают БЛА вправо, при отрицательном значении DE направляют летательный аппарат влево. При пилотировании БЛА над проводами линии электропередачи и изменении Eср и ΔE действуют, соответственно, на руль высоты и киль БЛА обратным образом по отношению к способу пилотирования БЛА под проводами линии электропередачи. Измерительную информацию, поступающую от цифрового осциллографа, и текущие координаты БЛА получают во время полета посредством GPS- или ГЛОНАСС - навигаторов и записывают в долговременную память портативного компьютера, расположенного на БЛА.
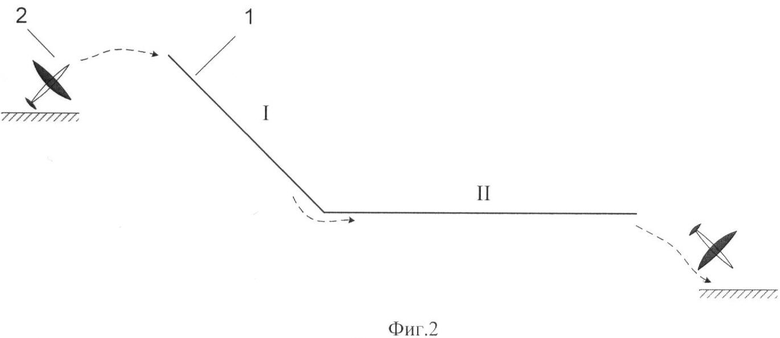
На фиг.1 показаны провода линии электропередачи (1), кривые равной напряженности электрического поля (2) и области (3), и (5) возможного расположения автоматически управляемого маломерного БЛА (4) в процессе диагностического облета высоковольтной воздушной ЛЭП; на фиг.2 - пример трассы ЛЭП (1) с прямолинейными участками I и II, и участками (пунктирные стрелки), где управление БЛА (2) выполняется в ручном (радиоуправляемом) режиме.
Способ осуществляется следующим образом. На БЛА устанавливают измерительную аппаратуру: электромагнитный датчик высокочастотного излучения и цифровой осциллограф. С помощью устройства радиоуправления (в ручном режиме) располагают БЛА под или над проводами воздушной ЛЭП, выполненной на опорах портального типа, и по радиоканалу включают устройство автоматического пилотирования, задавая расстояние до провода (высоту полета) величиной E0. На концах крыльев устанавливают датчики (устройства) измерения электрического поля. Измеренное на концах крыльев и усредненное по двум датчикам значение напряженности электрического поля Eср вводят в систему автоматического пилотирования летательным аппаратом. Если в процессе облета ЛЭП беспилотный летательный аппарат располагают под проводами ЛЭП, то при уменьшении в процессе полета средней напряженности электрического поля Eср вырабатывается сигнал, воздействующий на руль высоты и приводящий к ее увеличению относительно земли (т.е. к уменьшению расстояния от летательного аппарата до провода). Увеличение средней напряженности поля Eср, наоборот, используют для уменьшения высоты полета (увеличения расстояния до проводов).
При расположении летательного аппарата под проводами (в областях 3 - фиг.1) напряженность электрического поля, измеряемая на концах крыльев, имеет одинаковое значение, и система автоматического пилотирования не воздействует на киль летательного аппарата. При превышении напряженности поля, измеряемой на конце правого (по отношению к направлению движения) крыла БЛА (Eп), над напряженностью на конце левого крыла Eл, разностное значение DE положительно (DE>0), и вырабатывается сигнал, воздействующий на киль и заставляющий выполнять смещение БЛА вправо. Когда DE<0, вырабатывается сигнал для смещения БЛА влево. Таким образом, БЛА в полете находится (автоматически пилотируется) в области 3 (фиг.1).
В случае пилотирования БЛА над проводами ЛЭП (в зоне 5 - фиг.1) воздействуют на руль высоты и киль БЛА обратным образом по отношению к случаю пилотирования под проводами ЛЭП: при снижении Eср воздействуют на руль высоты и уменьшают ее; при DE>0 вырабатывают сигнал и воздействуют на киль для смещения БЛА влево.
Полет БЛА вдоль участков, где направление линии мало отличается от прямолинейного, выполняется в полностью автоматическом режиме. На участках, где линия резко изменяет свое направление от прямолинейного, и у системы автоматического управления недостаточна чувствительность, для верного изменения траектории полета БЛА оператор, находящийся на участке резкого изменения направления линии, отключает по радиоуправляемому устройству систему автопилотирования и выполняет перевод БЛА в требуемую зону полета (3) или (5) в ручном (радиоуправляемом) режиме (фиг.2 - пунктирные стрелки), после чего повторно включает систему автопилотирования. На конечном участке диагностируемой линии электропередачи посредством устройства радиоуправления БЛА переводят в ручной режим управления и выполняют его посадку на ровную площадку.
Пример. В соответствии с фиг.1 вертикальное положение летательного аппарата - приблизительно на расстоянии S=5 метров ниже центрального провода ЛЭП задают значением напряженности электрического поля, равным E0≅600 кВ/м. При увеличении в процессе автопилотирования напряженности электрического поля Eср относительно заданного выше значения E0 вырабатывается сигнал управления, воздействующий на руль высоты для уменьшения высоты полета БЛА (т.е. для увеличения расстояния S). При горизонтальном смещении БЛА относительно центрального провода на расстояние 1 м разность напряженностей электрического поля DE (измеренная на высоте ~5 м ниже центрального провода) составляет ~150 кВ/м. При смещении БЛА влево на 1 м DE≅150 кВ/м (DE>0) посредством системы автоматического пилотирования воздействуют на киль и направляют БЛА вправо; при смещении БЛА вправо - DE<0 и БЛА направляют влево.
Пилотирование БЛА в области 5 (над проводами ЛЭП - фиг.1) выполняют, воздействуя на руль высоты и киль обратным образом по отношению к случаю пилотирования в областях 3 (под проводами ЛЭП).
Для минимизации искажения электрического поля, создаваемого зарядами на проводах линии электропередачи, крылья БЛА изготавливаются из изоляционного материала, диэлектрическая проницаемость которого максимально приближается к диэлектрической проницаемости воздуха. Информацию от устройств измерения напряженности электрического поля, находящихся на концах крыльев, передают в систему автоматического пилотирования посредством гальванической (например, оптической) развязки.
Таким образом, места дефектов на линии электропередачи, локально создающие коронный или поверхностный разряды, т.е. инициирующие высокочастотное электромагнитное излучение, определяются посредством несложной и нетрудоемкой аэродиагностики с помощью маломерного недорогого беспилотного летательного аппарата.
Изобретение относится к электроэнергетике и может быть использовано для диагностики и локации дефектов в изоляции линий электропередачи, дефектов монтажа фазных проводов и арматуры, набросов на провода и т.д. Сущность: способ диагностики заключается в регистрации электрических высокочастотных импульсов вблизи линии электропередачи с помощью электромагнитного датчика и подключенного к нему цифрового осциллографа путем вдольтрассового облета линии. Измерительную аппаратуру перемещают вдоль трассы линии электропередачи с помощью автоматически управляемого маломерного беспилотного летательного аппарата (БЛА). В процессе полета измеряют напряженности электрического поля с помощью датчиков, расположенных по концам крыльев летательного аппарата. Вычисляют среднее значение напряженности поля, полученное от датчиков, и используют его для автоматического поддержания вертикального расположения летательного аппарата относительно проводов линии электропередачи, воздействуя на его руль высоты. Вдольтрассовое положение летательного аппарата автоматически поддерживают, воздействуя на киль, на основе разности измеренных напряженностей электрического поля. Измерительную информацию и текущие координаты летательного аппарата, получаемые с помощью GPS- или ГЛОНАСС - навигаторов, записывают в память портативного компьютера, расположенного на БЛА. Технический результат: простота, малая трудоемкость. 2 ил.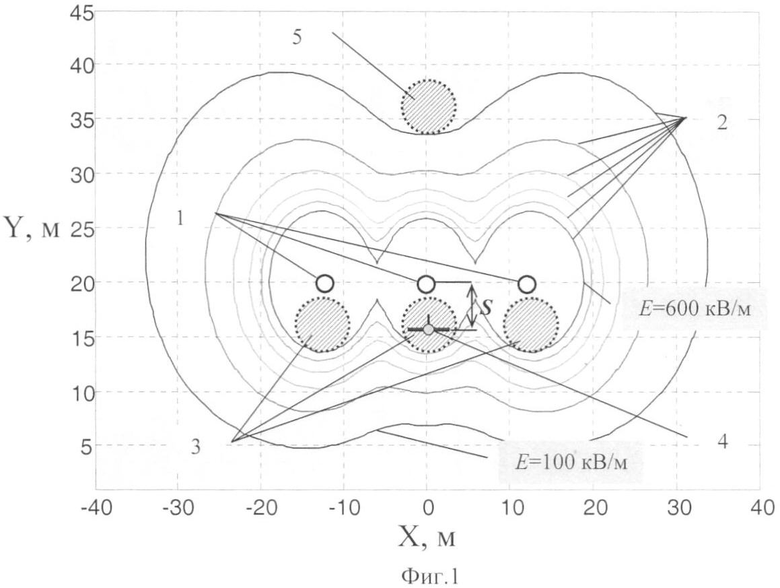
Способ диагностики высоковольтной воздушной линии электропередачи, заключающийся в регистрации электрических высокочастотных импульсов вблизи линии электропередачи с помощью измерительной аппаратуры (электромагнитного датчика и подключенного к нему цифрового запоминающего осциллографа) путем вдольтрассового облета линии электропередачи, отличающийся тем, что измерительную аппаратуру перемещают вдоль трассы линии с помощью автоматически управляемого маломерного беспилотного летательного аппарата (БЛА), для этого в процессе полета измеряют напряженность электрического поля, создаваемого проводами линии, с помощью датчиков, расположенных на концах крыльев БЛА, вычисляют среднее значение напряженности электрического поля Еср=(Еп+Ел)/2 (где Ел и Eп - действующие значения напряженности электрического поля, измеренные на левом и правом концах крыльев) и сравнивают его с наперед заданным значением Е0, определяющим вертикальное положение летательного аппарата относительно проводов линии электропередачи, при пилотировании БЛА под проводами линии электропередачи и выполнении условия Еср<Е0 посредством системы автоматического пилотирования, находящейся на БЛА, воздействуют на руль высоты и увеличивают ее (т.е. уменьшают расстояние от провода до БЛА), при Еср>Е0 высоту уменьшают (увеличивают расстояние от провода до БЛА); вдольтрассовое положение БЛА автоматически поддерживают, воздействуя на киль, на основе разности измеренных напряженностей электрического поля (ΔЕ=Еп-Ел), при положительном значении ΔЕ воздействуют на киль и смещают БЛА вправо, при отрицательном значении ΔЕ направляют летательный аппарат влево; при пилотировании БЛА над проводами линии электропередачи и изменении Еср и ΔЕ действуют соответственно на руль высоты и киль БЛА обратным образом по отношению к способу пилотирования БЛА под проводами линии электропередачи; измерительную информацию, поступающую от цифрового осциллографа, и текущие координаты БЛА получают во время полета посредством GPS- или ГЛОНАСС - навигаторов и записывают в долговременную память портативного компьютера, расположенного на БЛА.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| СПОСОБ МОНИТОРИНГА ТРАССОВЫХ ОБЪЕКТОВ | 2004 |
|
RU2256237C1 |
| US 5252912 A, 12.10.1993 | |||
| ДИКОЙ В.П | |||
| и др | |||
| Электромагнитная аэроинспекция воздушных линий электропередач, Электрические станции, №3, 1999, с.43-48. | |||

