Предлагаемое изобретение относится к телекоммуникационным устройствам удаленного мониторинга и телеметрии и будет особенно актуальным при мониторинге подводных переходов магистральных трубопроводов, трубопереходов и коммуникационных линий связи.
По существующим регламентам на подводных переходах необходимо регулярно осуществлять топографическую съемку русла по всей ширине технического коридора перехода и частично его охранной зоны. Целью топографических изысканий является определение отметок дна и заглубления трубопровода или коммуникационных линий связи, а, следовательно, надежности подводного перехода. При этом гидрологические и геодезические изыскания являются самыми распространенными при проектировании и при мониторинге гидротехнических объектов и представляют собой комплекс достаточно дорогостоящих мероприятий. В качестве альтернативы таким изысканиям предлагается применить недорогие автоматизированные средства электроники, вычислительной техники, телекоммуникаций и информационных технологий.
Аналогичные предложенному подходу функции выполняют радиобуи, предназначенные для подачи сигналов бедствия при авариях на воде.
Известны морские аварийные радиобуи (АРБ) автоматического включения при попадании в воду.
АРБ-406 (EPIRB) КОСПАС-САРСАТ может использоваться во всех морских районах, покрытых Глобальной морской системой связи при бедствии (ГМССБ). После активации буя вручную или автоматически он излучает сигнал бедствия в импульсном режиме в диапазоне 406 МГц, который ретранслируется на береговой центр через низкоорбитальные и геостационарные спутники.
Сигнал бедствия содержит опознаватель судна (MMSI). Координаты вычисляются по доплеровскому сдвигу частоты на низкоорбитальных спутниках.
Наиболее близким предлагаемому техническому решению является АРБ типа RT260M. Радиобуй является автономным устройством. Он питается от литиевых батарей, которые расположены в нижней части его корпуса. Органы управления АРБ сведены к минимуму; имеется кнопка для тестирования и тумблер автоматического/ручного (AUTO/ON) включения. В обычных условиях этот переключатель находится в положении AUTO, и АРБ готов к автоматическому включению при погружении в воду. RT260M состоит из двух полиуглеродных конусов, соединенных вместе водонепроницаемой прокладкой. В оранжевом конусе основания размещаются батареи питания и противовес. Общая масса батарей и противовеса гарантирует хорошую устойчивость в штормовых условиях.
Два электрода в основании нижнего конуса служат для электрического контакта при попадании буя в морскую воду. Как только АРБ попадает в море, вода обеспечивает электрическую проводимость между двумя электродами и автоматически включает буй после задержки 5 секунд.
В верхнем прозрачном конусе установлен импульсный источник света для облегчения визуального поиска в темное время суток. Также внутри верхней части конуса размещена передающая антенна. Электронная часть АРБ выполнена в виде отдельной микросхемы.
Несмотря на положительную плавучесть такой радиобуй не подходит для определения русловых деформаций по следующим причинам: буй всплывает при затоплении, т.е. изначально он над водой, а в случае определения русловых деформаций устройство должно изначально находиться под водой; замыкание контактов у радиобуя происходит от воды, а в случае определения русловых деформаций включение не может производиться от воды, поскольку устройство помещают во влажную почву дна и, кроме того, в радиобуях не предусмотрена система долговременного автономного энергообеспечения.
Устранить вышеназванные недостатки позволяет предлагаемое устройство для определения русловых деформаций, включающее радиопрозрачный корпус с положительной плавучестью и размещенными в нем электронной схемой, источником питания, антеной и противовесом, в котором согласно предполагаемому изобретению в одной части корпуса посредством прочных крепежных конструкций смонтирован печатный узел с размещенными на нем микросхемами контроллера, модема, их обвязкой и антеннами, соединенный через датчик положения с ключом для замыкания цепи питания с источником питания при изменении положения относительно изначального при всплытии, а в противоположной части корпуса размещен груз-противовес.
Кроме того, блок питания может быть представлен в виде груза-противовеса. Кроме того, для упрощения конструкции печатный узел может быть представлен в виде мобильного телефона, в цепь включения которого от аккумулятора установлен датчик положения с ключом для замыкания цепи питания при изменении положения относительно изначального.
Наличие груза-противовеса позволяет после всплытия устройства на водную поверхность ориентироваться антеннами вверх, что обеспечит беспроводное соединение с доступными сетями радиосвязи, точкой доступа wi-fi или патрулирующим БПЛА (беспилотным летательным аппаратом).
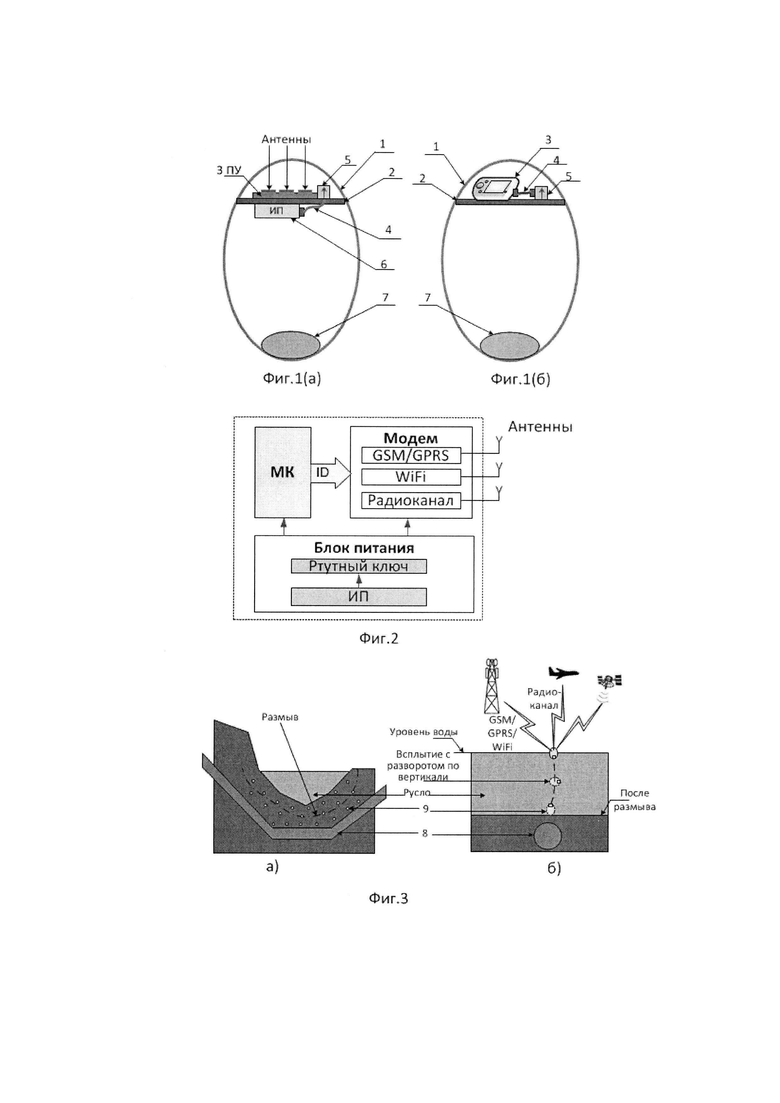
Предполагаемое изобретение поясняется чертежами, где на фиг. 1 представлена конструкция устройства (а, б); на фиг. 2 - схема печатного узла (ПУ); на фиг. 3 - принцип работы устройства по определению русловых деформаций.
Предлагаемое устройство включает радиопрозрачный корпус 1 с положительной плавучестью, в одной части которого с помощью крепежных конструкций 2 смонтирован ПУ 3, на котором размещены микросхемы контроллера, модема, их обвязка и антенны. ПУ 3 шлейфом 4 соединен через датчик положения (ДП) с ключом 5 (например, ртутный ключ) для замыкания цепи питания с ИП 6 (фиг. 1а), а в противоположной части корпуса размещен груз-противовес 7. Если источник питания 6 имеет вес сопоставимый с грузом-противовесом 7, он может быть использован в качестве груза-противовеса 7 с соответствующим удлинением шлейфа 4.
Предлагаемое устройство работает следующим образом:
Над проложенным под руслом реки трубопроводом или коммуникационными линиями связи 8 в грунте размещают предлагаемые телекоммуникационные устройства 9 (фиг. 1) в один или несколько рядов на различной глубине (фиг. 3а) центром тяжести вверх. Каждое устройство 9 имеет уникальный идентификационный номер (ID), который автоматически передается устройством при всплытии в сеть при ее обнаружении.
По мере снижения отметки дна при образовании размыва соответствующее устройство 9 всплывает на поверхность, поворачиваясь центром тяжести вниз (фиг. 3б). При таком изменении положения устройства 9 ДП с ключем 5 для замыкания цепи питания при изменении положения относительно изначального активизирует ИП 6. Далее осуществляется запуск основных модулей - микроконтроллера и модема, и начинается поиск доступной телекоммуникационной сети с последующей идентификацией ею уникального идентификационного номера (ID) абонента (всплывшего устройства). Микроконтроллер координирует работу остальных элементов схемы, т.е. реализует алгоритмы управления.
Поскольку современный недорогой мобильный телефон или смартфон по структуре (фиг. 1б) совпадает со структурой ПУ предлагаемого устройства, возможно его использовать, заменив ПУ и установив ДП с ключом для замыкания цепи питания при изменении положения относительно изначального в цепь питания телефона от аккумулятора в соответствующем положении в пространстве. Также телефон автоматически включается при подаче питания от АБК, например как смартфон Nokia Lumia. Каждый телефон имеет свой уникальный международный идентификатор мобильного оборудования (IMEI) - 15-разрядное число, уникальное для каждого использующего его аппарата. IMEI применяется в сотовых телефонах сетей GSM, WCDMA и в некоторых спутниковых телефонах и передается в сеть при подключении. Заключив договор со службами сотовой связи можно отслеживать факт появление в сети телефона с заданным IMEI, что будет свидетельствовать о наличие русловой деформации. В удаленных и малоосвоенных районах можно использовать спутниковый телефон.
Факт всплытия и обнаружения сетью конкретного устройства сигнализирует о русловой деформации (размыве русла) на соответствующей глубине в соответствующем месте. Таким образом, применение предлагаемых устройств позволяет автоматизировать и удешевить процесс мониторинга русловых деформаций в районах подводных переходов магистральных трубопроводов, трубопереходов и коммуникационных линий связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОБУЙ ДЛЯ ПЕРЕДАЧИ СИГНАЛОВ БЕДСТВИЯ ИЗ-ПОДО ЛЬДА | 2020 |
|
RU2737151C1 |
| Всплывающий аварийно-информационный радиобуй с надувной сферической спиральной антенной декаметрового диапазона | 2021 |
|
RU2763846C1 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2016 |
|
RU2629000C1 |
| РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2688544C1 |
| ДВУХМОДУЛЬНАЯ ПОДВОДНАЯ ЛОДКА С АВАРИЙНО-СПАСАТЕЛЬНОЙ СИСТЕМОЙ, ОСНАЩЕННАЯ ОПЕРАТИВНО-ТАКТИЧЕСКИМ КОМПЛЕКСОМ | 2005 |
|
RU2309871C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЁТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2001 |
|
RU2201601C2 |
| Станция (система) приёма и обработки информации от среднеорбитального сегмента космической системы поиска и спасания и способ управления наведением антенн этой станции | 2015 |
|
RU2622390C2 |
| СПУТНИКОВАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СУДОВ И САМОЛЕТОВ, ПОТЕРПЕВШИХ АВАРИЮ | 2003 |
|
RU2258940C1 |
Изобретение относится к телекоммуникационным устройствам удаленного мониторинга, телеметрии и может быть использовано при мониторинге подводных переходов магистральных трубопроводов и коммуникационных линий связи. Устройство включает радиопрозрачный корпус с положительной плавучестью. В одной части корпуса посредством прочных крепежных конструкций смонтирован печатный узел (ПУ) с размещенными на нем микросхемами контроллера, модема, их обвязкой и антеннами. Печатный узел (ПУ) соединен через датчик положения с ключом для замыкания цепи питания с источником питания при изменении положения относительно изначального при всплытии. В противоположной части корпуса размещен груз-противовес. Блок питания может быть представлен в виде груза-противовеса. Кроме того, для упрощения конструкции печатный узел может быть представлен в виде мобильного телефона, в цепь включения которого от аккумулятора установлен датчик положения с ключом для замыкания цепи питания при изменении положения относительно изначального. Каждое устройство имеет уникальный идентификационный номер (ID), который автоматически передается устройством при всплытии в сеть при ее обнаружении. Факт всплытия и обнаружения сетью конкретного устройства сигнализирует о русловой деформации (размыве русла) на соответствующей глубине в соответствующем месте. Применение предлагаемых устройств позволяет автоматизировать и удешевить процесс мониторинга русловых деформаций в районах подводных переходов магистральных трубопроводов и коммуникационных линий связи. 2 з.п. ф-лы, 4 ил.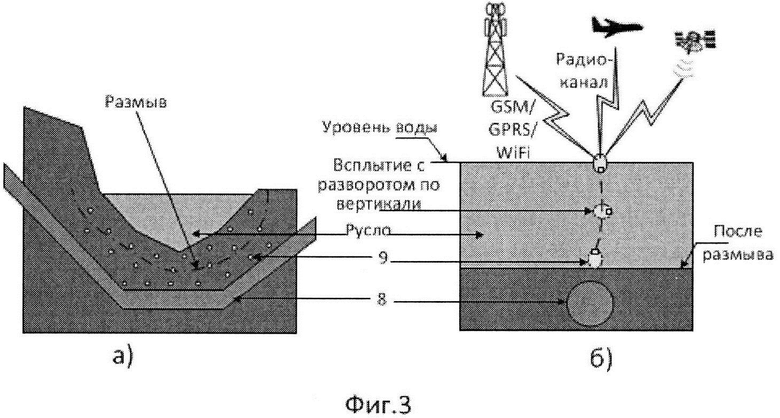
1. Устройство для определения русловых деформаций, включающее радиопрозрачный корпус с положительной плавучестью и размещенными в нем электронной схемой, источником питания, антенной и противовесом, отличающееся тем, что в одной части корпуса посредством прочных крепежных конструкций смонтированы печатный узел с размещенными на нем микросхемами контроллера, модема, их обвязкой и антеннами, соединенный через датчик положения с ключом для замыкания цепи питания с источником питания при изменении положения относительно изначального при всплытии, а в противоположной части корпуса размещен груз-противовес.
2. Устройство по п. 1, отличающееся тем, что блок питания может быть представлен в виде груза-противовеса.
3. Устройство по п. 1, отличающееся тем, что для упрощения конструкции печатный узел может быть представлен в виде мобильного телефона, в цепь включения которого от аккумулятора установлен датчик положения с ключом для замыкания цепи питания при изменении положения относительно изначального.
| Способ прокладки подводного трубопровода | 1983 |
|
SU1086279A1 |
| US 2014273677 A1, 18.09.2014 | |||
| СЕКЦИЯ ПОДВОДНОГО ТРУБОПРОВОДА И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2009 |
|
RU2429404C1 |
| СЕКЦИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2013 |
|
RU2522705C1 |
| СПОСОБ ПРОКЛАДКИ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА ПРИ СТРОИТЕЛЬСТВЕ ГЛУБОКОВОДНОГО ПЕРЕХОДА | 2009 |
|
RU2418222C2 |

