Область техники
Настоящее изобретение относится к сельскохозяйственной рабочей машине с опережающим регулированием приводной мощности и/или приводной трансмиссии, а также к способу опережающего регулирования приводной мощности и/или приводной трансмиссии сельскохозяйственной рабочей машины.
Уровень техники
Современные сельскохозяйственные рабочие машины, например, тракторы, полевые измельчители, зерноуборочные комбайны или другие сельскохозяйственные машины для обработки поля или убранной массы, оснащены передаточными механизмами, передаточное отношение которых может переключаться вручную или автоматически. При этом передаточные механизмы могут быть, например, синхронизированными ступенчатыми механизмами, частично или полностью переключаемыми под нагрузкой, или бесступенчатыми передаточными механизмами с разветвлением мощности. Выбор или переключение требуемого передаточного отношения передаточного механизма может производиться как вручную оператором сельскохозяйственной рабочей машины, так и автоматически системой управления приводной трансмиссией с помощью устройства, обычно называемого регулятором хода. Кроме того имеются механические и/или гидравлические и/или электрические вспомогательные приводы и/или рабочие приводы, которые управляются оператором и/или блоком управления и/или регулятором хода. В дополнение к настройке передаточного отношения передаточного механизма может выполняться изменение числа оборотов двигателя и/или крутящего момента двигателя и/или приводной мощности, чтобы приводить их в соответствие с установленной конфигурацией приводной трансмиссии. Конфигурацией приводной трансмиссии может быть, например, переключение определенного передаточного отношения передаточного механизма. При ручном переключении передаточного отношения передаточного механизма оператором он может, например, также устанавливать вручную число оборотов двигателя. При автоматическом переключении передаточного отношения передаточного механизма системой управления приводной трансмиссией она может помимо этого, например, автоматически регулировать также приводную мощность приводного двигателя, в частности, число оборотов двигателя и/или крутящий момент двигателя.
При этом устройство управления системы управления приводной трансмиссией обычно использует действительные данные состояния от различных датчиков и интерфейсов сельскохозяйственной рабочей машины. Поскольку при этом могут учитываться только действительные данные состояния рабочей машины, это может отрицательно сказываться на функционировании регулятора хода. Так, например, быстрая последовательность изменений в воспринимаемом состоянии может приводить к неудовлетворительному регулированию передаточного механизма или двигателя.
Из патентного документа ЕР 1353828 А1 известен способ, согласно которому для поддержания постоянной скорости на уклоне определяют требуемую мощность торможения как функцию веса транспортного средства, включая его нагрузку, причем для регулирования учитываются несколько наборов параметров, рассчитанных на различные веса транспортных средств. Дополнительно требуемая мощность торможения может определяться как функция топографии, причем топография может привлекаться к настройке параметров с помощью навигационного устройства. При этом топография служит только в качестве дополнительного критерия выбора для характеристической кривой, служащей основой для регулирования тормозной мощности, когда тормоз приводится в действие оператором. Недостаток решения состоит в том, что не осуществляется непосредственного регулирования, в частности, автоматического регулирования тормозной мощности в зависимости от топографии. В такой же степени невелика возможность регулирования приводной мощности. В результате необходимо, чтобы водитель следил за дорогой для снижения или поддержания постоянной скорости при движении на уклоне путем соответствующего воздействия на тормоз.
Раскрытие изобретения
Соответственно, задачей настоящего изобретения является создание сельскохозяйственной рабочей машины, которая позволяет улучшить регулирование приводной мощности и/или приводной трансмиссии. Далее, задача изобретения состоит в том, чтобы предложить способ, который позволяет улучить регулирование приводной мощности и/или приводной трансмиссии.
Решение поставленной задачи обеспечивается за счет отличительных признаков независимых пунктов 1 и 10 формулы изобретения. Предпочтительные примеры осуществления и решения по развитию изобретения будут ясны из зависимых пунктов формулы и последующего описания.
В соответствии с изобретением сельскохозяйственная рабочая машина, содержащая, по меньшей мере, один приводной двигатель, приводную трансмиссию, а также устройство управления для управления и/или регулирования приводного двигателя и/или приводной трансмиссии и блок определения положения, содержит устройство управления, выполненное и настроенное с возможностью регулирования приводного двигателя, в частности, приводной мощности приводного двигателя, и/или приводной трансмиссии опережающим образом в зависимости от условий окружения. За счет опережающего регулирования приводной мощности приводного двигателя и/или регулирования приводной трансмиссии сельскохозяйственной рабочей машины регулирование может осуществляться перед тем, как эти условия окружения наступят и сделают необходимым регулирование приводной мощности и/или приводной трансмиссии. Условие окружение, которое оказывает влияние на требуемую приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины, является, например, повышением рельефа маршрута движения или изменением свойств почвы, которые могут приводить к повышенной потребности в приводной мощности и/или нагрузки приводной трансмиссии. Опережающее регулирование приводной мощности и/или нагрузки приводной трансмиссии дает то преимущество, что при наступлении изменения условий окружения приводная трансмиссия уже подготовлена к этому изменению, и требуемая приводная мощность и/или требуемая конфигурация приводной трансмиссии уже имеются в распоряжении. За счет этого, например, может более эффективно эксплуатироваться приводной двигатель, поскольку повышение приводной мощности и/или изменение конфигурации приводной трансмиссии осуществляется своевременно при возникновении потребности, так что может устраняться глушение приводного двигателя, например, при внезапном скачкообразном повышении требуемой приводной мощности и/или нагрузки приводной трансмиссии. Кроме того, приводная трансмиссия, особенно передаточный механизм могут переключаться заблаговременно перед наступлением изменения условий окружения, благодаря чему приводной двигатель может эксплуатироваться в оптимальном режиме. В результате обеспечивается возможность более эффективного и улучшенного регулирования приводной мощности и/или приводной трансмиссии. Кроме того, за счет опережающего, в частности, автоматического регулирования приводной мощности и/или приводной трансмиссии может быть снижена рабочая нагрузка оператора сельскохозяйственной рабочей машины, так как он уже не должен непрерывно следить за предстоящим ходом маршрута движения, чтобы своевременно предпринять регулирование.
В следующем примере осуществления изобретения устройство управления выполнено и настроено с возможностью опережающего определения требуемой сельскохозяйственной рабочей машиной приводной мощности приводного двигателя и/или нагрузки приводной трансмиссии вдоль подлежащего проходу маршрута движения. Опережающее определение требуемой приводной мощности и/или нагрузки приводной трансмиссии может быть, в частности, повторяемым и/или непрерывным определением требуемой приводной мощности и/или нагрузки приводной трансмиссии для частичной области предстоящего маршрута движения или полным определением требуемой приводной мощности и/или нагрузки приводной трансмиссии вдоль всего предстоящего маршрута движения. За счет предварительного определения требуемой приводной мощности и/или конфигурации приводной трансмиссии устройство управления может более эффективно регулировать приводную мощность и/или приводную трансмиссию, так как целевая величина требуемой к определенному моменту времени приводной мощности, нагрузки приводной трансмиссии и/или конфигурации приводной трансмиссии уже определена с возможностью вызова, так что отпадает необходимость в занимающих время вычислениях.
В особенно предпочтительном примере осуществления изобретения приводная мощность и/или нагрузка приводной трансмиссии сельскохозяйственной рабочей машины могут регулироваться посредством регулирования приводного двигателя и/или приводной трансмиссии, в частности, посредством предварительно определяемой конфигурации приводной трансмиссии. При этом регулирование приводной трансмиссии сельскохозяйственной рабочей машины может быть регулированием передаточного механизма, вспомогательного потребителя и/или рабочего привода. Приводная трансмиссия может содержать как механические, так и гидравлические и электрические компоненты приводной трансмиссии, а также их комбинации, например, в гибридных приводных трансмиссиях и/или в приводных трансмиссиях с разветвлением мощности. Регулирование приводной мощности и/или приводной трансмиссии повышает гибкость работы устройства управления, так как, например, регулирование требуемой приводной мощности и/или приводной трансмиссии может осуществляться посредством изменения числа оборотов, крутящего момента и/или имеющейся в распоряжении мощности рабочей машины и/или с помощью соответствующей конфигурации приводной трансмиссии. Однако особенное преимущество заключается в том, что устройство управления может регулировать приводную мощность и/или приводную трансмиссию опережающим образом, так что особенно при востребовании более высокого тягового усилия не происходит его прерывания.
Предпочтительно условиями окружения являются параметры управления, которые оказывают влияние на требуемую приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины, в частности, вдоль маршрута движения сельскохозяйственной рабочей машины. Благодаря отображению условий окружения в виде параметров управления они могут восприниматься более дифференцированно и лучше поддаваться обработке. Условия окружения могут выражаться посредством характерных путевых параметров управления в виде топографии, в частности, высотного профиля, и/или в виде свойств почвы вдоль маршрута движения. Кроме того, дает преимущества использование характерных машинных параметров управления в виде, по меньшей мере, временной потребности в мощности вспомогательного привода и/или рабочего агрегата сельскохозяйственной рабочей машины.
Предпочтительно, по меньшей мере, одно условие окружения может определяться сельскохозяйственной рабочей машиной и, в частности, устройством управления. Преимущество решения состоит в том, что сельскохозяйственная рабочая машина может воспринимать условия окружения, например, топографию вдоль маршрута движения, независимо от инфраструктуры, через которую могут предоставляться данные, созданные третьими сторонами.
В предпочтительном примере осуществления изобретения предусмотрен связанный с устройством управления для обмена данными навигационный блок с системой планирования маршрутов для разработки маршрута движения. Решение имеет преимущество в том, что маршрут движения может быть спланирован непосредственно на борту сельскохозяйственной рабочей машины, причем для определения требуемой приводной мощности и/или нагрузки приводной трансмиссии вдоль маршрута могут использоваться условия окружения, воспринятые рабочей машиной или предоставленные ей.
В особенно предпочтительном примере осуществления изобретения предусмотрен связанный с устройством управления блок связи для обмена данными, в частности, условиями окружения, параметрами управления и/или маршрутами движения, с центральным процессором. Блок связи может обеспечивать возможность прямого обмена данными, в частности, условиями окружения, параметрами управления и/или маршрутами движения, с другой рабочей машиной. Обмен данными с центральным процессором и/или с другой рабочей машиной дает то преимущество, что могут вновь использоваться и передаваться уже воспринятые условия окружения и/или маршруты движения. За счет этого уже воспринятые условия окружения и/или маршруты движения могут привлекаться к текущему определению требуемой приводной мощности вдоль маршрута движения.
Далее, изобретение относится к способу опережающего регулирования приводной мощности и/или приводной трансмиссии для сельскохозяйственной рабочей машины, которая содержит, по меньшей мере, один приводной двигатель, приводную трансмиссию, а также устройство управления для управления и/или регулирования приводного двигателя и/или приводной трансмиссии и блок определения положения. В соответствии с изобретением приводной двигатель, в частности, приводную мощность приводного двигателя, и/или приводную трансмиссию регулируют посредством устройства управления опережающим образом в зависимости от условий окружения.
Решение имеет преимущество в том, что при наступлении изменения условий окружения приводная трансмиссия уже подготовлена к этому изменению. За счет этого, например, может более эффективно эксплуатироваться приводной двигатель, поскольку повышение числа оборотов и/или крутящего момента и/или приводной мощности осуществляется своевременно при возникновении потребности, так что может устраняться глушение приводного двигателя. Кроме того, приводная трансмиссия может быть отрегулирована заблаговременно перед наступлением изменения, так что она может эксплуатироваться в оптимальном режиме. Благодаря этому обеспечивается возможность более эффективного и лучшего регулирования приводной мощности и/или приводной трансмиссии. Кроме того, за счет опережающего, в частности, автоматического регулирования приводной мощности и/или приводной трансмиссии может быть снижена рабочая нагрузка оператора сельскохозяйственной рабочей машины, так как он уже не должен непрерывно следить за предстоящим ходом маршрута движения.
В предпочтительном решении по развитию способа приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины вдоль подлежащего проходу маршрута движения определяют опережающим образом.
Это дает преимущество в том, что устройство управления может более эффективно регулировать приводную мощность и/или приводную трансмиссию, так как целевая величина требуемой приводной мощности и/или нагрузки приводной трансмиссии уже известна с возможностью вызова, так что отпадает необходимость в занимающих время вычислениях.
В следующем примере осуществления способа приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины регулируют посредством регулирования приводного двигателя и/или приводной трансмиссии, в частности, посредством предварительно определяемой конфигурации приводной трансмиссии. При этом приводная трансмиссия может содержать как механические, так и гидравлические и электрические компоненты приводной трансмиссии, а также их комбинации, например, в гибридных приводных трансмиссиях и/или в приводных трансмиссиях с разветвлением мощности. Регулирование приводной мощности и/или приводной трансмиссии повышает гибкость работы устройства управления, так как, например, регулирование требуемой приводной мощности и/или приводной трансмиссии может осуществляться посредством изменения числа оборотов и/или крутящего момента и/или имеющейся в распоряжении мощности рабочей машины и/или с помощью соответствующей конфигурации приводной трансмиссии. Однако особенное преимущество заключается в том, что устройство управления может регулировать приводную мощность и/или приводную трансмиссию опережающим образом, так что особенно при востребовании более высокого тягового усилия не происходит его прерывания.
Предпочтительно, по меньшей мере, одно условие окружения и/или маршрут движения определяется сельскохозяйственной рабочей машиной и, в частности, устройством управления. Преимущество решения состоит в том, что сельскохозяйственная рабочая машина может воспринимать условия окружения, например, топографию вдоль маршрута движения, независимо от инфраструктуры.
В особенно предпочтительном решении по развитию способа условия окружения, в частности, параметры управления и/или маршруты движения, записывают с возможностью вызова в центральном процессоре и/или предоставляют через центральный процессор. Помимо центрального процессора может осуществляться соответствующий обмен данными также с другой рабочей машиной. Преимущество состоит в том, что могут вновь использоваться и передаваться уже воспринятые условия окружения и/или маршруты движения. За счет этого уже воспринятые условия окружения и/или маршруты движения могут привлекаться к текущему определению требуемой приводной мощности вдоль маршрута движения.
Краткое описание чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примеров осуществления со ссылками на прилагаемые чертежи.
На чертежах:
фиг. 1 схематично изображает сельскохозяйственную рабочую машину с приводной трансмиссией;
фиг. 2а схематично изображает сельскохозяйственную рабочую машину при движении по маршруту с подъемом;
фиг. 2b схематично изображает сельскохозяйственную рабочую машину по фиг. 2а с улучшенным регулированием приводной мощности и/или приводной трансмиссии;
фиг. 3а схематично изображает высотный профиль поля;
фиг. 3b схематично изображает потребность в тяговом усилии сельскохозяйственной рабочей машины для движения по полю по фиг. 2а; и
фиг. 4 схематично изображает маршрут движения сельскохозяйственной рабочей машины на поле с картированной потребностью в тяговом усилии.
Осуществление изобретения
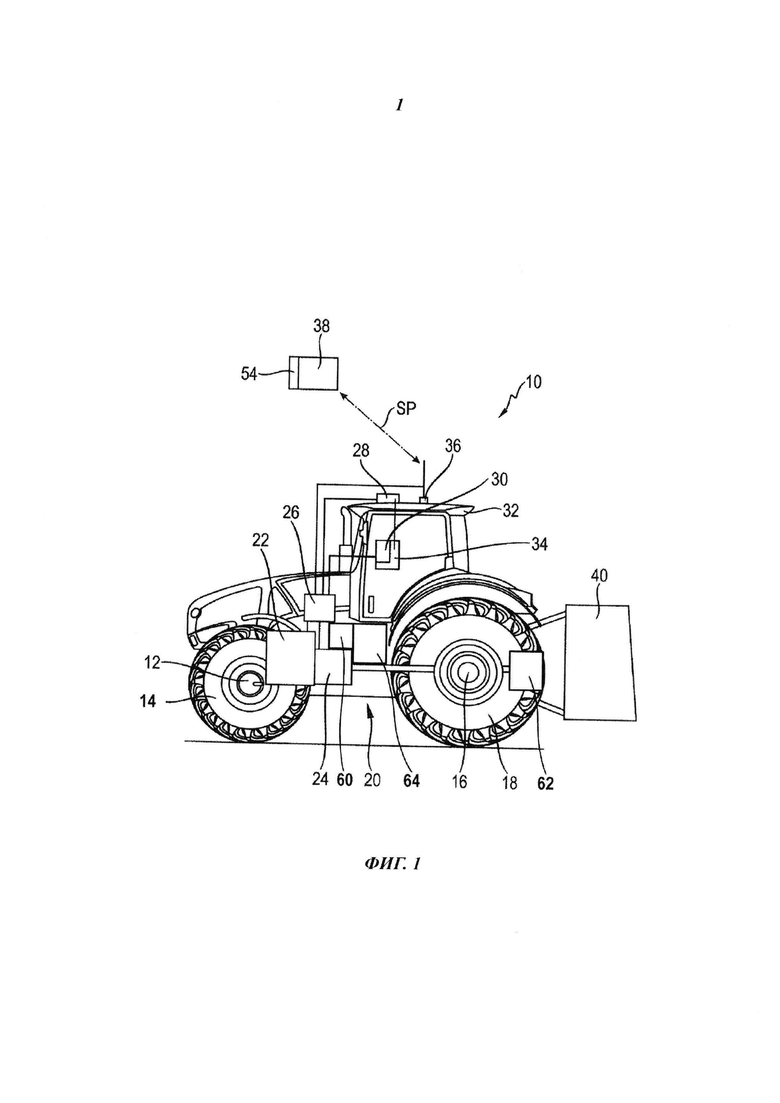
На фиг. 1 схематично показана на виде сбоку сельскохозяйственная рабочая машина 10, в качестве примера выполненная в виде трактора. В контексте изобретения сельскохозяйственная рабочая машина 10 может быть любой рабочей машиной, которая может использоваться для обработки поля, такой как полевой измельчитель, зерноуборочный комбайн или трактор, с рабочим агрегатом или прицепом или без них. Трактор снабжен передней ходовой осью 12 с передними колесами 14 и задней ходовой осью 16 с задними колесами 18. Сельскохозяйственная рабочая машина 10 в виде трактора оснащена, по меньшей мере, одним приводным двигателем 22 и приводной трансмиссией 20 с передаточным механизмом 24. Приводной двигатель 22 может быть, например, двигателем внутреннего сгорания. Посредством приводной трансмиссии 20 и/или приводного двигателя 22 может регулируемым образом поставляться приводная мощность, необходимая, например, для обработки поля и/или для дорожного движения сельскохозяйственной рабочей машины 10, причем создаваемый приводным двигателем 22 крутящий момент может передаваться через приводную трансмиссию 20 на задние колеса 18, так что трактор может двигаться по полю (вперед или назад). При этом с помощью передаточного механизма 24 может переключаться передаточное отношение. Современные тракторы оснащаются передаточными механизмами 24, передаточное отношение которых может переключаться вручную или автоматически также и под нагрузкой, причем передаточный механизм 24 может быть синхронизированным ступенчатым механизмом, частично или полностью переключаемым под нагрузкой, а также бесступенчатым передаточным механизмом 24 с разветвлением мощности. Кроме задней ходовой оси 16 альтернативно или дополнительно приводной трансмиссией 20 может приводиться передняя ходовая ось 12. При этом передняя ходовая ось 12 и/или задняя ходовая ось 16 вместо колес 14, 18 может быть снабжена, например, гусеничным ходовым механизмом.
Приводная трансмиссия 20 сельскохозяйственной рабочей машины 10 может содержать помимо приводного двигателя 22 и передаточного механизма 24 другие элементы, в частности, элементы, которые генерируют в машине 10 приводную мощность и передают ее на дорогу. Так, например, приводная трансмиссия 20 может содержать приводные переднюю и/или заднюю ходовые оси 12, 16 и смонтированные на них колеса 14, 18. Далее, приводная трансмиссия 20 может содержать элементы для передачи приводной мощности приводного двигателя 22, такие как муфты, валы и/или вспомогательные и рабочие приводы 60 для механической, гидравлической, пневматической и/или электрической передачи мощности, которые здесь в целях упрощения не показаны и подробно не описываются. Так, например, вспомогательный привод для механической передачи мощности может быть валом 62 отбора мощности. Приводная трансмиссия может также содержать элементы замедления, такие как тормозы, замедлители гидродинамического или электродинамического действия и/или механические, гидравлические, пневматические, электрические и/или химические аккумуляторы 64 энергии.
Для мониторинга и/или управления различными функциями сельскохозяйственной рабочей машины 10, в частности, для управления и/или регулирования приводного двигателя 22, в частности, приводной мощности приводного двигателя 22, и/или приводной трансмиссии 20, сельскохозяйственная рабочая машина 10 оснащена устройством 26 управления. При этом один или несколько элементов приводной трансмиссии 20 могут быть выполнены регулируемыми посредством устройства 26 управления. Устройство 26 управления может автоматически управлять, например, передаточным механизмом 24, если он не настроен вручную оператором. При ручной настройке параметров приводной трансмиссии, например, в виде определенного передаточного отношения, оператор обычно может также непосредственно настраивать число оборотов и/или крутящий момент приводного двигателя 22. При автоматизированном регулировании приводного двигателя 22 и/или приводной трансмиссии 20 устройство 26 управления может дополнительно производить также регулирование числа оборотов и/или крутящего момента и/или приводной мощности приводного двигателя 22. Для этого устройство 26 управления может быть связано с рядом датчиков и интерфейсов (не показаны), которые поставляют для установки педали хода, например, информацию о настроенной допустимой нагрузке приводного двигателя, и числе оборотов двигателя и/или о нагрузке приводной трансмиссии.
Для определения действительного положения сельскохозяйственной рабочей машины 10 она оснащена устройством 28 определения положения. При этом устройство 28 определения положения связано с устройством 26 управления для предоставления и передачи ему данных положения. Кроме того, устройство 26 управления может быть связано с индикаторным устройством 30, причем индикаторное устройство 30 может быть расположено, например, в кабине 32 водителя машины 10. С помощью индикаторного устройства 30 для водителя сельскохозяйственной рабочей машины 10 могут указываться, например, данные рабочей машины, приводной трансмиссии и/или маршрута движения. Для разработки маршрута движения машина 10 может быть оснащена навигационным блоком 34, в котором может быть предусмотрено планирование маршрута. Навигационный блок 34 может быть, например, встроен в индикаторное устройство 30. Посредством блока 36 связи рабочей машины 10 может производиться обмен данными с внешним процессором 38, в частности, по беспроводной связи. При этом, например, заданный маршрут движения может передаваться на рабочую машину 10 от внешнего процессора 38. Кроме того, на процессор 38 от рабочей машины 10 могут передаваться данные об окружающих условиях, например, о свойствах почвы или о нагрузке на приводную трансмиссию, для записи в память и/или для обработки.
На сельскохозяйственной рабочей машине 10 могут быть смонтированы различные рабочие агрегаты. В контексте изобретения под рабочим агрегатом следует понимать любой агрегат, который может быть включен в состав машины 10 и, в частности, для своего привода может требовать части ее приводной мощности. Так, например, рабочий агрегат 40 может быть почвообрабатывающим орудием, таким как плуг, разбрасывателем удобрений или транспортным прицепом. При этом рабочий агрегат 40 может постоянно или часть времени находиться в контакте с почвой или не углубляться в нее. Так, например, рабочий агрегат 40 в виде разбрасывателя удобрений может работать без контакта с почвой, тогда как плуг заглублен в почву при вспашке и не заглублен в нее на краю поля и при дорожном движении. Навесной рабочий агрегат 40 может увеличивать массу сельскохозяйственной рабочей машины 10 и должен перемещаться вместе с ней. Кроме того, особенно при работе рабочего агрегата в почве значительно повышается потребность в тяговом усилии и/или в механической и/или гидравлической и/или электрической мощности рабочей машины 10, что повышает нагрузку на приводную трансмиссию и требуемую мощность сельскохозяйственной рабочей машины 10. При этом требуемая приводная мощность может зависеть, например, от топографии маршрута движения, причем на крутых подъемах маршрута требуется более высокая приводная мощность и/или тяговое усилие, чем на ровных участках. Под топографией следует понимать естественную поверхность земли с ее возвышенностями, ложбинами, неровностями и формами. Далее, потребность в механической и/или гидравлической и/или электрической мощности может повышаться вследствие переменных свойств почвы и/или других параметров рабочего процесса. Для достижения как можно более низкого энергопотребления приводной двигатель 22 может эксплуатироваться в оптимальном режиме при максимально возможной нагрузке по крутящему моменту, так что уже небольшое изменение приводной мощности и/или нагрузки приводной трансмиссии может приводить к изменению параметров приводной трансмиссии, например, к переключению передаточного отношения передаточного механизма 24 устройством 26 управления. Это может приводить, например, к нежелательным процессам переключения.
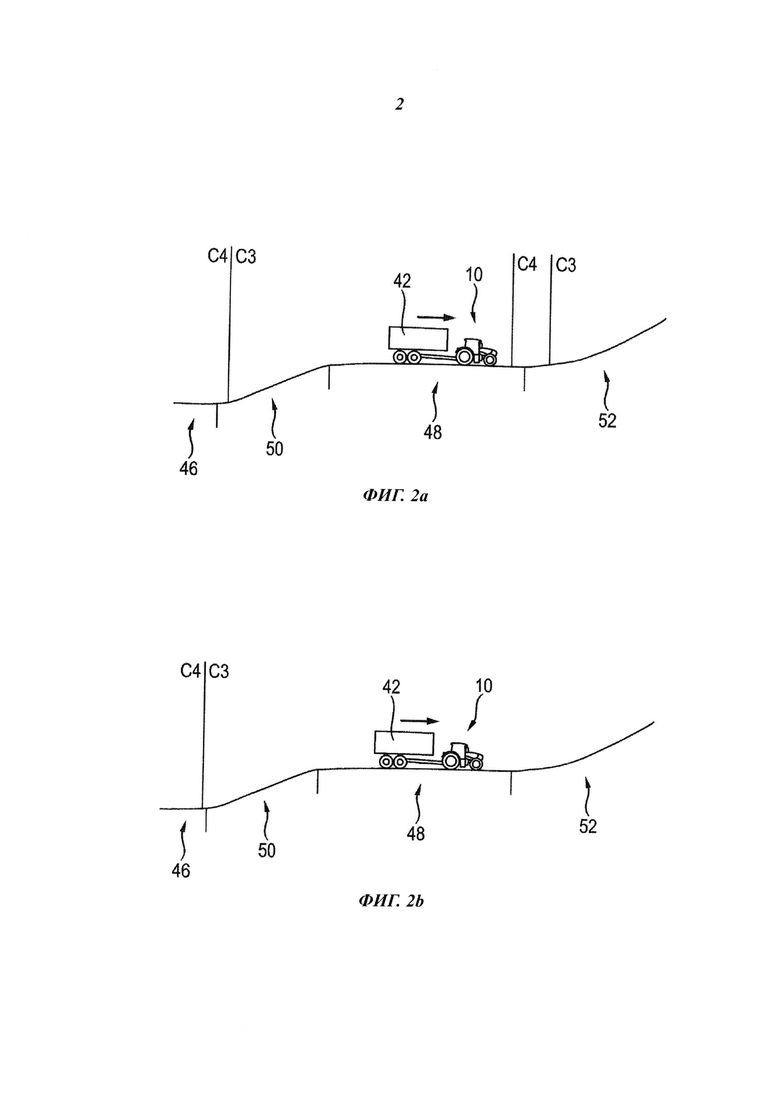
На фиг. 2а показана сельскохозяйственная рабочая машина 10 в виде трактора с прицепом 42 в качестве рабочего агрегата 40. Трактор показан при проезде по маршруту 44 движения с неравномерным подъемом, например, при транспортных работах на дороге. Маршрут 44 движения содержит первый ровный участок 46 и второй ровный участок 48, между которыми расположен первый подъем 50. Ко второму ровному участку 48 примыкает второй подъем 52. Если, например, трактор едет в автоматическом режиме с автоматическим регулированием приводной мощности и/или приводной трансмиссии 20 посредством устройства 26 управления при транспортировке на первом ровном участке 46, то при достижении первого подъема 50 устройство 26 управления настраивает передаточное отношение передаточного механизма 24 и/или число оборотов и/или крутящий момент и/или приводную мощность приводного двигателя 22 в соответствии с возрастающей нагрузкой на привод. Как показано на фиг. 2а, в начале первого подъема 50 устройство 26 управления переключает передаточное отношение С4 передаточного механизма на понижение на передаточное отношение С3, чтобы настроить передаточное отношение передаточного механизма в соответствии с нагрузкой на приводную трансмиссию, по меньшей мере, до достижения второго ровного участка 48. В результате заметно меньшего подъема на втором участке 48 устройство 26 управления, например, для снижения потребления топлива вновь переключает передаточное отношение С3 передаточного механизма обратно на передаточное отношение С4, причем переключение, как правило, должно производиться заблаговременно. Однако показанный на фиг. 2а второй ровный участок 48 относительно короток, так что второй подъем 52 следует уже непосредственно после переключения передаточного механизма 24 на повышение. Вновь возрастающая нагрузка на приводную трансмиссию приводит к новому переключению устройством 26 управления передаточного механизма 24 на понижение, на передаточное отношение С3, что может приводить к так называемому маятниковому раскачиванию переключения, которое неблагоприятно, в частности, для ступенчатого передаточного механизма частичного переключения под нагрузкой, в котором групповые переключения производятся с прерыванием тягового усилия. Если эти передаточные механизмы имеют перекрытие групп, предпочтительно перед подъемом производится смена групп, связанная с прерыванием тягового усилия, чтобы в области подъема можно было выполнять только переключение под нагрузкой без прерывания тягового усилия. Это повышает комфорт движения и снижает потери скорости.
В соответствии с изобретением для устранения ненужных процессов переключения и, в частности, маятникового раскачивания переключения посредством устройства управления производится опережающее регулирование приводной мощности и/или приводной трансмиссии 20 в зависимости от окружающих условий. При этом по ходу маршрута 44 движения сельскохозяйственной рабочей машины 10 может опережающим образом определяться требуемая, в частности, зависящая от положения приводная мощность и/или нагрузка приводной трансмиссии и использоваться устройством 26 управления. При этом под опережающим регулированием следует понимать регулирование устройством 26 управления приводной мощности и/или конфигурации приводной трансмиссии, требуемой в определенной точке Р маршрута 44 движения, настолько своевременно, что достигается стабильная эксплуатация приводной трансмиссии 20 и, в частности, приводного двигателя 22 при повышении нагрузки приводной трансмиссии. При этом регулирование приводной мощности и/или приводной трансмиссии может осуществляться, в частности, переключением передаточного механизма 24.
При этом требуемая вдоль маршрута 44 движения приводная мощность рабочей машины 10 может определяться на основе требуемой и/или ожидаемой вдоль маршрута 44 движения нагрузки приводной трансмиссии, сопротивления движению, тягового усилия и/или нагрузки на вспомогательный привод сельскохозяйственной рабочей машины 10. Нагрузка приводной трансмиссии может включать в себя все нагрузки, действующие в приводной трансмиссии 20. Частью нагрузки приводной трансмиссии может быть, например, сопротивление движению сельскохозяйственной рабочей машины 10, включающее в себя сумму сопротивлений, которые рабочая машина должна преодолевать, чтобы двигаться с постоянной скоростью или ускорением на горизонтальном или наклонном маршруте 44 движения. Требуемое тяговое усилие рабочей машины 10 вдоль маршрута 44 движения может определяться в зависимости от положения и может основываться, например, на рабочем агрегате, используемом на маршруте 44 движения. При этом, например, рабочий агрегат 40, находящийся в контакте с почвой при обработке поля, требует более высокого тягового усилия, чем прицеп, транспортируемый по ровной дороге. От рабочего агрегата 40, используемого при движении по маршруту 44 движения, может также зависеть нагрузка вспомогательного привода. Она является нагрузкой, которая требуется, чтобы приводить рабочий агрегат 40, например, с помощью механического привода, такого как вал отбора мощности, и/или гидравлического и/или электрического привода. При использовании рабочего агрегата 40 требуемая нагрузка вспомогательного привода больше, чем, например, при дорожном движении, когда рабочий агрегат 40 не работает.
Регулирование приводной мощности может осуществляться путем регулирования приводной трансмиссии 20, в частности, путем регулирования передаточного механизма 24 посредством устройства 26 управления. Устройство 26 управления может, например, опережающим образом регулировать передаточный механизм 24 и, в частности, передаточное отношение С3, С4 таким образом, что требуемая приводная мощность и/или конфигурация приводной трансмиссии обеспечивается самое позднее тогда, когда в результате изменившихся условий окружения требуется повышенная приводная мощность и/или повышенный приводной крутящий момент. Для опережающего предоставления достаточной приводной мощности или достаточного приводного крутящего момента и/или числа оборотов устройство 26 управления может альтернативно или дополнительно регулировать приводной двигатель 22 и/или другие элементы приводной трансмиссии 20. Так, устройство 26 управления показанной на фиг. 2b сельскохозяйственной рабочей машины 10 может заблаговременно предпринять перевод на передаточное отношение С3 еще на первом ровном участке 48 перед началом первого подъема 50. После достижения второго ровного участка 48 устройство 26 управления на основе известных условий окружения, в частности, непосредственного примыкания второго подъема 52 ко второму ровному участку 48, может пропустить переключение на повышение на передаточное отношение С4 передаточного механизма, поскольку устройству 26 управления уже известна потребная для второго подъема 52 приводная мощность и/или конфигурация приводной трансмиссии, и оно может предпринять соответствующее опережающее регулирование. В показанном примере осуществления потребное передаточное отношение С3 передаточного механизма уже выбрано, так что нет необходимости в переключении передаточного механизма 24. За счет этого благодаря опережающему регулированию приводной мощности и/или приводной трансмиссии 20 может устраняться ненужное переключение на повышение и маятниковое раскачивание управления.
За счет опережающего обеспечения требуемой приводной мощности и/или конфигурации приводной трансмиссии, например, при быстром увеличении требуемой приводной мощности и/или нагрузки приводной трансмиссии может устраняться запаздывающее переключение передаточного отношения передаточного механизма и глушение приводного двигателя 22. Кроме того, может устраняться так называемое маятниковое раскачивание переключения передаточного механизма 24, при котором из-за быстро меняющихся условий окружения повторным образом изменяется передаточное отношение передаточного механизма. Особенно в частично переключаемом передаточном механизме 24, который содержит перекрытие групп отдельных передаточных отношений, может производиться опережающая смена групп с прерыванием тягового усилия, так что при затребовании необходимой приводной мощности и/или нагрузки приводной трансмиссии могут осуществляться следующие переключения внутри группы без прерывания тягового усилия. Это позволяет улучшить функционирование устройства 26 управления. Кроме того, особенно при быстрых изменениях нагрузки, может быть снижено энергопотребление и улучшены комфорт движения и управляемость.
В соответствии с изобретением опережающее регулирование приводной мощности и/или приводной трансмиссии по ходу маршрута 44 движения осуществляется в зависимости от условий окружения. Перед определением релевантных условий окружения может быть определен маршрут, по которому должна следовать сельскохозяйственная рабочая машина 10. Маршрут 44 движения может включать в себя, например, движение по дороге к обрабатываемому полю и/или от него. Кроме того, маршрут 44 движения может включать в себя путь движения машины на поле. Для разработки маршрута 44 движения сельскохозяйственная рабочая машина 10 может быть оснащена навигационным блоком 34 с системой планирования маршрутов, связанным с устройством 26 управления для обмена данными. Маршрут 44 движения может также предоставляться центральным процессором 38, с которым устройство 26 управления может обмениваться данными с помощью блока 36 связи.
Вдоль маршрута 44 движения требуемая приводная мощность и/или нагрузка приводной трансмиссии может изменяться в зависимости от условий окружения. В рамках изобретения под условиями окружения следует понимать все параметры управления, влияющие на потребность в приводной мощности сельскохозяйственной рабочей машины по ходу маршрута движения. При этом условия окружения могут быть характерными для пути и/или для машины параметрами SP управления. Характерные путевые параметры SP управления могут описывать характеристики маршрута 44 движения, оказывающие влияние на требуемую приводную мощность и/или нагрузку приводной трансмиссии. Так, например, топография маршрута 44 движения может быть характерным путевым параметром SP управления, причем здесь могут учитываться как подъемы, спуски, так и криволинейные участки маршрута 44 движения. Топография маршрута 44 движения может восприниматься, например, как характерный путевой параметр SP управления в виде высотного профиля или рельефа подлежащего прохождению маршрута 44 движения, причем маршрут 44 движения может включать в себя предстоящую дорогу и/или предстоящее поле движения. Характерный путевой параметр SP управления может быть также, например, свойствами почвы вдоль маршрута 44 движения, которые оказывают влияние на сцепление рабочей машины 10 и определяют требуемую нагрузку приводной трансмиссии и приводную мощность. Требуемое для обработки почвы тяговое усилие может быть дальнейшим характерным путевым параметром SP управления, причем тяговое усилие по ходу маршрута на поле может изменяться из-за неоднородности почвы, что особенно влияет на требуемое тяговое усилие при вспашке поля плугом. В частности, на обрабатываемом поле состояние растительности может также учитываться как характерный путевой параметр управления, поскольку состояние растительности, то есть то обстоятельство, что поле является лугом или его почва разрыхлена культиватором или вспахана плугом, оказывает влияние на потребность в тяговом усилии, в частности, рабочего агрегата, и на характеристику сцепления рабочей машины. Состояние растительности в качестве характерного путевого параметра управления позволяет, например, использовать в данной ситуации величину потребности в тяговом усилии, известную из последней обработки поля. Для определения требуемой приводной мощности и/или нагрузки приводной трансмиссии в качестве характерного путевого параметра управления могут использоваться, например, имеющиеся погодные данные вдоль маршрута 44 движения, поскольку метеорологические условия могут влиять на потребность в тяговом усилии и/или характеристику сцепления, различные для сухой или влажной почвы.
Помимо характерных путевых параметров SP управления на требуемую приводную мощность и/или нагрузку приводной трансмиссии могут влиять также характерные машинные параметры SP управления. Так, например, требуемая приводная мощность и/или нагрузка приводной трансмиссии может изменяться в зависимости от используемого рабочего агрегата 40, причем в качестве характерного машинного параметра SP управления может учитываться, например, вес рабочего агрегата 40, в частности, отдельно или в общем весе рабочей машины 10. При рабочем агрегате 40, который, по меньшей мере, периодически приводится с помощью вспомогательного привода рабочей машины 10, в качестве характерного машинного параметра SP управления может учитываться потребность рабочего агрегата в приводной мощности вдоль маршрута движения. Другими характерными машинными параметрами SP управления могут быть, например, давление воздуха в шинах и/или распределение веса или балластировка рабочей машины 10, особенно с навесным рабочим агрегатом 40. При этом действительное распределение веса рабочей машины 10 может быть проверено перед началом работы устройством 26 управления на основе предстоящего маршрута движения и имеющихся в распоряжении параметров управления, например, высотного профиля и потребности в тяговом усилии. В результате для улучшения распределения веса оператору может быть указана улучшенная балластировка рабочей машины 10.
Параметры SP управления и/или маршрут 44 движения могут быть разработаны в рабочей машине 10 и/или предоставлены рабочей машине 10 от центрального процессора 38 и/или от другой рабочей машины 10 через блок 36 связи. Так, например, по ходу маршрута 44 движения, особенно на поле, сельскохозяйственная рабочая машина 10 может определять параметры SP управления в виде высотного профиля и/или привязанной к положению потребности в тяговом усилии вдоль маршрута 44 движения, причем эти параметры управления могут передаваться на центральный процессор 38 и/или, например, непосредственно на следующую рабочую машину (не показана). При этом характерные путевые параметры управления в виде высотного профиля могут определяться, например, с помощью блока 28 определения положения, который может представлять собой систему определения положения. Привязанная к положению потребность в тяговом усилии при работе на поле может измеряться, например, с помощью датчика тягового усилия на монтажном устройстве рабочего агрегата 40 или с помощью системы датчиков на ходовом механизме, например, на задней ходовой оси 16, и привязываться к текущему положению рабочей машины 10.
При этом центральный процессор 38 может принимать, записывать в память с возможностью вызова и/или обрабатывать данные, в частности, данные маршрута 44 движения или параметров управления от одной или нескольких рабочих машин 10. Для записи одного или нескольких маршрутов 44 движения и/или параметров управления процессор 38 и/или рабочая машина 10 могут быть оснащены записывающим устройством 54, выполненным соответствующим образом. Благодаря этим генерируемым рабочей машиной 10 параметрам управления, например, таким как потребность в тяговом усилии при работающем в контакте с почвой рабочем агрегате, таком как плуг, могут очень точно восприниматься резкие изменения тягового усилия на краю поля вследствие подъема и/или опускания рабочего агрегата, что обеспечивает возможность эффективного регулирования приводной мощности рабочей машины 10. Полученные данные для определенного поля, например, маршруты движения и/или параметры управления, могут сводиться центральным процессором 38 в так называемую сводную картотеку и храниться для каждой рабочей машины 10 с возможностью вызова. За счет этого уже при планировании обработки поля сельскохозяйственной рабочей машине 10 и ее устройству 26 управления может предоставляться информация о соответствующем маршруте 44 движения и относящихся к нему параметрах управления. Эта информация может актуализироваться устройством 26 управления, например, на основе новых условий окружения. За счет этого устройство 26 управления может определять требуемую приводную мощность и/или нагрузку приводной трансмиссии для запланированного маршрута 44 движения и опережающим образом регулировать приводную мощность и/или нагрузку приводной трансмиссии.
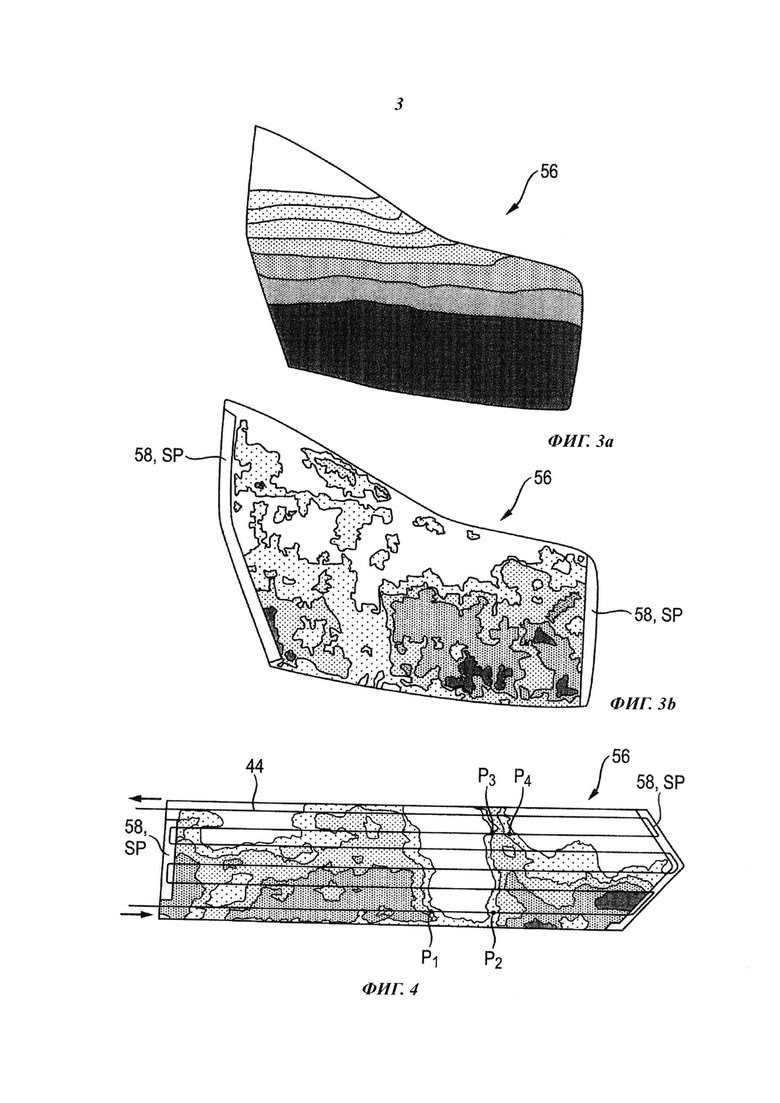
На фиг. 3а показано подлежащее обработке поле 56, причем топография поля 56 в качестве характерного путевого параметра управления представлена графически различными тонами, при этом поверхность поля поднимается от светлой области до более темных областей. Таким образом, вместе с запланированным маршрутом движения (не показан) в качестве параметра управления для маршрута 44 движения может быть определен высотный профиль. Однако для определения требуемой приводной мощности вдоль маршрута движения помимо высотного профиля следует учитывать также свойства почвы вдоль маршрута движения. Почва также оказывает влияние как на характеристику сцепления сельскохозяйственной рабочей машины 10, а следовательно и на предстоящее преодолению сопротивление движению и на достижимые тяговые усилия, так и на потребность в тяговом усилии рабочего агрегата 40, находящегося в контакте с почвой. В зависимости от свойств почвы поля 56 может быть определена и картирована потребность в тяговом усилии на поле. Картированная потребность в тяговом усилии на показанном на фиг. 3а поле 56 представлена на фиг. 3b. При этом потребность в тяговом усилии тем больше, чем темнее показана область, причем ясно видно, что потребность в тяговом усилии при обработке почвы помимо высотного профиля основывается на свойствах почвы поля 56. На показанном на фиг. 3b поле 56 на двух противоположных сторонах представлены две незатененные полосы, параллельные смежным с ними наружным кромкам поля 56. Эти области представляют так называемые края 58 поля, на которых маршрут движения рабочей машины 10 обычно изменяет свое направление на противоположное, причем сельскохозяйственная рабочая машина 10 разворачивается в противоположном направлении для продолжения обработки поля 56. При этом в области края поля рабочий агрегат 40, который для обработки заглублен в почву, может быть поднят и после изменения направления рабочей машины 10 вновь опущен. При подъеме и опускании рабочего агрегата 40 может происходить скачкообразное изменение требуемого тягового усилия, а следовательно, и приводной мощности и/или нагрузки приводной трансмиссии рабочей машины 10. При этом особенное внимание следует уделять скачкообразному повышению требуемого тягового усилия и приводной мощности после опускания и заглубления рабочего агрегата 40 в почву, так как это может приводить к глушению приводного двигателя 22. Однако благодаря опережающему регулированию приводной мощности устройством 26 управления путем соответствующего регулирования приводной трансмиссии 20 требуемая приводная мощность может обеспечиваться своевременно перед заглублением в почву.
На фиг. 4 показан другой пример поля 56 с неравномерными свойствами почвы, которые приводят к графически представленной потребности в тяговом усилии, причем потребность в тяговом усилии тем больше, чем темнее показана область. Для обработки поля 56 показан маршрут 44 движения, подлежащий проходу рабочей машиной 10. Вдоль маршрута 44 движения потребность в тяговом усилии, а следовательно, и приводная мощность рабочей машины 10 может колебаться с различной резкостью. Требуемое тяговое усилие на поле 56 и особенно вдоль маршрута 44 движения, может, например, передаваться на устройство 26 управления от центрального процессора 38 в качестве параметров управления. Центральный процессор 38 может содержать записанные в сводной картотеке с возможностью вызова маршрут движения и/или параметры управления, например, полученные при предыдущей обработке поля 56. Возможен также вариант, в котором рабочая машина 10 самостоятельно разрабатывает маршрут 44 движения и получает от центрального процессора только параметры управления о потребности в тяговом усилии на поле 56 для определения и регулирования требуемой приводной мощности и/или приводной трансмиссии. Вдоль проходимого в направлении стрелок маршрута 44 движения, например, в точке Р1 предстоит скачкообразное снижение требуемого тягового усилия, при этом в следующей точке Р2 потребность в тяговом усилии вновь скачкообразно возрастает. Устройство 26 управления может регулировать приводную мощность в зависимости от расстояния между изменениями требуемого тягового усилия. Так, например, при коротком расстоянии настройка приводной трансмиссии 20, в частности, передаточного механизма 24, может оставаться неизменной, так как непосредственно вслед за снижением вновь требуется высокое тяговое усилие. За счет этого может устраняться маятниковое переключение. С другой стороны, при достаточно большом расстоянии между изменениями требуемой приводной мощности устройство 26 управления может регулировать, например, передаточный механизм 24, чтобы выбрать более высокое передаточное отношение. Новое регулирование для обеспечения более высокой приводной мощности и/или нагрузки приводной трансмиссии может осуществляться достаточно заблаговременно, так что стабильная точка эксплуатации устанавливается до того, как потребуется повышенная приводная мощность и/или нагрузка приводной трансмиссии.
При достижении края 58 поля заглубленный в почву рабочий агрегат 40 может быть поднят и выведен из почвы. После разворота рабочей машины 10 на краю 58 поля при опускании рабочего агрегата 40 вновь происходит скачкообразное повышение требуемого тягового усилия. При этом, например, в зависимости от продолжительности пребывания рабочей машины 10 на краю поля устройство 26 управления может отрегулировать приводную мощность и/или приводную трансмиссию 20, в частности, до того, как рабочий агрегат 40 будет вновь опущен и заглублен в почву. В точке Р3 также происходит скачкообразное повышение требуемого тягового усилия, которое потребуется до точки Р4. Поскольку точка Р3 расположена близко к точке Р4, устройство 26 управления может пропустить регулирование приводной мощности и/или приводной трансмиссии 20, если действительная приводная мощность достаточно велика, чтобы без глушения приводного двигателя 22 или резкой нагрузки на него достичь точки Р4, в которой понадобится более низкое тяговое усилие. Возможен также вариант, в котором устройство 26 управления оставляет передаточный механизм 24 и передаточное отношение неизменным и своевременно повышает только число оборотов и/или приводной крутящий момент и/или приводную мощность приводного двигателя 22.
Перечень позиций
10 Сельскохозяйственная рабочая машина
12 Передняя ходовая ось
14 Переднее колесо
16 Задняя ходовая ось
18 Заднее колесо
20 Приводная трансмиссия
22 Приводной двигатель
24 Передаточный механизм
26 Устройство управления
28 Устройство определения положения
30 Индикаторное устройство
32 Кабина водителя
34 Навигационный блок
36 Блок связи
38 Процессор
40 Рабочий агрегат
42 Транспортный прицеп
44 Маршрут движения
46 Первый ровный участок
48 Второй ровный участок
50 Первый подъем
52 Второй подъем
54 Запоминающее устройство
56 Поле
58 Край поля
60 Вспомогательный привод
62 Вал отбора мощности
64 Аккумулятор энергии
С3, С4 Передаточное отношение передаточного механизма
P1,2,3,4 Точка вдоль маршрута движения
SP Параметр управления
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАКТОР И СПОСОБ ЭКСПЛУАТАЦИИ ТРАКТОРА | 2021 |
|
RU2832217C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2014 |
|
RU2665151C2 |
| РАБОЧАЯ МАШИНА С РЕГУЛИРОВАНИЕМ ПРЕДЕЛА МОЩНОСТИ С ИСПОЛЬЗОВАНИЕМ БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2008 |
|
RU2497033C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2018 |
|
RU2768726C2 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
Группа изобретений относится к сельскохозяйственному машиностроению. Сельскохозяйственная рабочая машина содержит по меньшей мере один приводной двигатель, приводную трансмиссию, устройство управления для управления и/или регулирования приводного двигателя и/или приводной трансмиссии и блок определения положения. Устройство управления выполнено с возможностью регулирования приводного двигателя и/или приводной трансмиссии опережающим образом в зависимости от условий окружения. Группа изобретений позволяет улучшить регулирование приводной мощности и/или приводной трансмиссии сельскохозяйственной рабочей машины. 2 н. и 10 з.п. ф-лы, 6 ил.
1. Сельскохозяйственная рабочая машина, содержащая по меньшей мере один приводной двигатель (22), приводную трансмиссию (20), а также устройство (26) управления для управления и/или регулирования приводного двигателя (22) и/или приводной трансмиссии (20) и блок (28) определения положения, отличающаяся тем, что устройство (26) управления выполнено и настроено с возможностью регулирования приводного двигателя (22), в частности, приводной мощности приводного двигателя (22), и/или приводной трансмиссии (20) опережающим образом в зависимости от условий окружения, при этом условием окружения является характерный путевой параметр (SP) управления в виде топографии, в частности, высотного профиля, и/или в виде свойств почвы вдоль маршрута (44) движения, и условием окружения является характерный машинный параметр (SP) управления в виде, по меньшей мере, временной потребности в мощности по меньшей мере одного компонента приводной трансмиссии (20), вспомогательного привода и/или рабочего агрегата (40) сельскохозяйственной рабочей машины (10).
2. Сельскохозяйственная рабочая машина по п. 1, отличающаяся тем, что устройство управления выполнено и настроено с возможностью опережающего определения требуемой сельскохозяйственной рабочей машиной (10) приводной мощности приводного двигателя (20) и/или нагрузки приводной трансмиссии вдоль подлежащего проходу маршрута (44) движения.
3. Сельскохозяйственная рабочая машина по п. 1 или 2, отличающаяся тем, что обеспечена возможность регулирования приводной мощности и/или нагрузки приводной трансмиссии сельскохозяйственной рабочей машины (10) посредством регулирования приводного двигателя (22) и/или приводной трансмиссии (20), в частности, посредством предварительно определяемой конфигурации приводной трансмиссии (20).
4. Сельскохозяйственная рабочая машина по п. 2, отличающаяся тем, что условиями окружения являются параметры (SP) управления, которые оказывают влияние на требуемую приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины (10), в частности, вдоль маршрута (44) движения сельскохозяйственной рабочей машины (10).
5. Сельскохозяйственная рабочая машина по п. 2, отличающаяся тем, что обеспечена возможность определения по меньшей мере одного условия окружения сельскохозяйственной рабочей машиной (10) и, в частности, устройством (26) управления.
6. Сельскохозяйственная рабочая машина по п. 2, отличающаяся тем, что предусмотрен связанный с устройством (26) управления для обмена данными навигационный блок (34) с системой планирования маршрутов для разработки маршрута (44) движения.
7. Сельскохозяйственная рабочая машина по п. 2, отличающаяся тем, что предусмотрен связанный с устройством (26) управления блок (36) связи для обмена данными, в частности, условиями окружения, параметрами (SP) управления и/или маршрутами (44) движения, с центральным процессором (38).
8. Способ опережающего регулирования приводной мощности и/или приводной трансмиссии (20) для сельскохозяйственной рабочей машины (10), которая содержит по меньшей мере один приводной двигатель (22), приводную трансмиссию (20) и устройство (26) управления для управления и/или регулирования приводного двигателя (22) и/или приводной трансмиссии (20) и блок (28) определения положения, отличающийся тем, что приводной двигатель (22), в частности, приводную мощность приводного двигателя (22), и/или приводную трансмиссию (20) регулируют посредством устройства (26) управления опережающим образом в зависимости от условий окружения, при этом условием окружения является характерный путевой параметр (SP) управления в виде топографии, в частности, высотного профиля, и/или в виде свойств почвы вдоль маршрута (44) движения, и условием окружения является характерный машинный параметр (SP) управления в виде, по меньшей мере, временной потребности в мощности по меньшей мере одного компонента приводной трансмиссии (20), вспомогательного привода и/или рабочего агрегата (40) сельскохозяйственной рабочей машины (10).
9. Способ по п. 8, отличающийся тем, что приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины (10) вдоль подлежащего проходу маршрута (44) движения определяют опережающим образом.
10. Способ по п. 8 или 9, отличающийся тем, что приводную мощность и/или нагрузку приводной трансмиссии сельскохозяйственной рабочей машины (10) регулируют посредством регулирования приводного двигателя (22) и/или приводной трансмиссии (20), в частности, посредством предварительно определяемой конфигурации приводной трансмиссии (20).
11. Способ по п. 9, отличающийся тем, что по меньшей мере одно условие окружения и/или маршрут (44) движения определяется сельскохозяйственной рабочей машиной (10) и, в частности, устройством (26) управления.
12. Способ по п. 9, отличающийся тем, что условия окружения, в частности параметры (SP) управления и/или маршруты (44) движения, записывают с возможностью вызова в центральном процессоре (38) и/или предоставляют через центральный процессор (38).
| US 5995895 A, 30.11.1999 | |||
| US 5832400 A, 03.11.1998 | |||
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВИЖЕНИЯ УБОРОЧНОЙ МАШИНЫ | 2003 |
|
RU2359446C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2152147C1 |

