Область техники, к которой относится изобретение
Настоящее изобретение относится к трактору согласно ограничительной части п. 1 формулы изобретения. Далее, изобретение относится к способу эксплуатации трактора согласно п. 20 формулы изобретения.
Уровень техники
При обработке почвы на сельскохозяйственных землях в качестве тягача обычно используют трактор, с которым соединяют сменное оборудование. Трактор оснащают подъемным механизмом, имеющим верхнюю тягу и нижнюю тягу. Сменное оборудование соединяют с подъемным механизмом, переводящим названное оборудование из транспортного положения в рабочее и наоборот. Сменное оборудование в рабочем положении оказывает на почву силовое воздействие. Трактор названного вначале вида известен из ЕР 3243368 А1. Трактор содержит оптимизирующую работу трактора систему помощи водителю, имеющую процессор, запоминающее устройство и по меньшей мере одно видеоконтрольное устройство как интерфейс ввода, причем процессор обрабатывает информацию, генерируемую внутренними для машины сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве. Трактор и/или сменное оборудование содержат управляющий модуль для управления трактором и сменным оборудованием и для задания их параметров. Система помощи водителю, известная из ЕР 3243368 А1, построена так, что она имеет комплекс автоматики трактора и комплекс автоматики сменного оборудования, причем комплекс автоматики трактора и комплекс автоматики сменного оборудования оптимизируют режим работы трактора и/или по меньшей мере одного сменного оборудования. При этом для задания режима работы сменного оборудования используют специальные стратегии оптимизации, такие как, например, резонансное колебание (англ.: «Power Нор») для предотвращения зависящего от нагрузки раскачивания системы трактор - оборудование, обработка стерни, рыхление почвы, выравнивание, перемешивание, подготовка посевного ложа, окомкование и прикатывание почвы.
При буксировке по сельскохозяйственным почвам соотношение между горизонтальным тяговым усилием, создаваемым ходовым механизмом или грунтозацепами, (приводное усилие) и вертикальным усилием, действующим на ходовой механизм или на грунтозацепах, (нагрузка на колеса) должно быть таким, чтобы получить максимально возможную эффективность тяги. Величину горизонтального усилия, создаваемого ходовым механизмом, или приводного усилия определяет при этом тяговое усилие, требуемое для сменного оборудования при заданных рабочих параметрах, таких как рабочая глубина, рабочая скорость и соответственно преобладающие рабочие условия. Величина вертикального усилия, действующего на ходовом механизме, или нагрузка на колеса может быть в пределах конструктивных ограничений трактора, таких как собственный вес трактора, допустимая нагрузка на ось, допустимый общий вес трактора, отрегулирована посредством балластировки трактора так, чтобы отношение вертикального и горизонтального усилий, имеющих место на ходовом механизме, повышало эффективность тяги. На современных тракторах подъемный механизм имеет управление по позиции (управление по положению), управление по тяговому усилию и смешанное управление в виде взвешенной комбинации из управления по позиции и управления по тяговому усилию. Кроме того, на управление по тяговому усилию может быть наложено управление пробуксовкой. Регулируемой переменной в соответствующих системах управления подъемного механизма является при этом горизонтальное усилие, создаваемое ходовым механизмом, или приводное усилие. В рамках этих управляющих воздействий оператор вводит поддерживаемое заданное значение, на базе которого происходит управление подъемным механизмом. Оператор обязан при этом сам оценить, какая регулировка обеспечивает наилучший компромисс между производительностью, эффективностью и качеством работы. Наряду с этой трудностью - необходимость самостоятельной оценки оператором - в процессе обработки часто происходят изменения условий эксплуатации, которые оператор не обнаруживает и поэтому также не учитывает.
Раскрытие сущности изобретения
Поэтому в основе изобретения лежит задача таким образом развить и усовершенствовать известный трактор, чтобы стала возможной улучшенная оптимизация рабочего режима трактора, в частности, на фоне условий эксплуатации, возникающих во время процесса обработки.
Эта задача согласно изобретению решена трактором согласно ограничительной части п. 1 формулы изобретения в сочетании с его отличительными признаками.
Согласно пункту 1 предложен трактор с по меньшей мере одним подъемным механизмом, имеющим верхнюю тягу, а также нижнюю тягу и связанные с ними исполнительные устройства, и с по меньшей мере одним соединенным с подъемным механизмом сменным оборудованием, содержащий также оптимизирующую работу, по меньшей мере, трактора систему помощи водителю, оснащенную процессором, запоминающим устройством и по меньшей мере одним интерфейсом ввода, причем процессор обрабатывает информацию, генерируемую внутренними для машины сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве, и причем трактор и/или по меньшей мере одно сменное оборудование имеют управляющий модуль для управления трактором и/или сменным оборудованием и для задания их параметров, причем система помощи водителю содержит комплекс автоматики подъемного механизма, причем этот комплекс автоматики подъемного механизма выполнен с возможностью работы на базе характеристических кривых и причем этот комплекс автоматики подъемного механизма выполнен с возможностью оптимизированной настройки по меньшей мере одного рабочего параметра трактора в зависимости от сохраненных в запоминающем устройстве выбираемых стратегий регулирования и/или оптимизационных целевых установок. В частности, комплекс автоматики подъемного механизма выполнен с возможностью оптимизированной настройки по меньшей мере одного установочного параметра по меньшей мере одного подъемного механизма как рабочего параметра трактора в зависимости от сохраненных в запоминающем устройстве выбираемых стратегий регулирования и/или оптимизационных целевых установок. При использовании присоединенного или навешенного рабочего оборудования часть веса этого оборудования и/или часть усилий, действующих на почвообрабатывающих инструментах, переходит на трактор. Комплекс автоматики подъемного механизма делает возможной оптимизированную настройку посредством задания рабочих параметров трактора, влияющих на вертикальное усилие, действующее на ходовом механизме, в частности, задания по меньшей мере одного установочного параметра по меньшей мере одного подъемного механизма как рабочего параметра трактора. Таким образом, по сравнению с предшествующим уровнем техники может быть получена улучшенная и ускоренная оптимизация настройки, учитывающая изменения условий эксплуатации во время процесса обработки.
Как правило, тракторы имеют один передний подъемный механизм и один задний подъемный механизм, позволяющие задавать их параметры совместно или независимо друг от друга посредством комплекса автоматики подъемного механизма.
В частности, оптимизация по меньшей мере одного рабочего параметра посредством комплекса автоматики подъемного механизма может включать в себя учет влияния на соединенное с подъемным механизмом сменное оборудование, а также на двунаправленную передачу усилий между трактором и сменным оборудованием. При этом вид или тип сменного оборудования имеет большое значение. Такое сменное оборудование 2 как, например, почвообрабатывающие орудия - плуг или культиватор, оказывает иное влияние на эффективность тяги, чем такое сменное оборудование 2 как, например, распределители удобрений или навесные сеялки, не контактирующие напрямую с почвой или создающие лишь небольшие горизонтальные усилия по сравнению с почвообрабатывающим оборудованием.
Согласно предпочтительному варианту осуществления изобретения по меньшей мере один рабочий параметр может включать в себя по меньшей мере одно результирующее усилие или один компонент усилия, передаваемый от сменного оборудования на трактор и действующий в горизонтальном и/или вертикальном направлении.
Предпочтительно, по меньшей мере один рабочий параметр может быть по меньшей мере одним установочным параметром подъемного механизма из группы, содержащей положение на подъемном механизме верхней тяги и/или нижних тяг, действующее на подъемном механизме усилие на нижних тягах, длину верхней тяги и/или нижних тяг, усилие на верхней тяге, длину подъемной стойки, геометрию подъемного механизма. Наряду с действующими на подъемном механизме усилиями, используемыми как установочный параметр подъемного механизма, соответствующая геометрия подъемного механизма, получаемая из положения верхней тяги, нижних тяг и подъемной стойки на подъемном механизме, а также из задания значений их длины, оказывает влияние на оптимизацию как установочный параметр подъемного механизма, в частности, из-за того, что эти усилия и геометрия подъемного механизма влияют друг на друга.
При этом выбираемая стратегия регулирования может включать в себя по меньшей мере одну стратегию "Эффективность", "Производительность", "Затраты", "Качество", "Урожайность" или комбинацию стратегий "Эффективность", "Производительность", "Затраты", "Качество" и/или "Урожайность". Стратегии регулирования представляют собой подходы, основанные на целостном восприятии трактора и сменного оборудования при оптимизации. При этом в соответствии со стратегией регулирования "Эффективность" происходит оптимизация расхода на единицу площади (литры/га) и/или требуемого для обработки рабочего времени. Стратегия регулирования "Производительность" основана на оптимизации производительности в расчете на единицу площади сельскохозяйственных угодий (га/ч). Использование стратегии регулирования "Затраты" позволяет оптимизировать затраты на единицу площади (евро/га). Использование стратегии регулирования "Качество" позволяет оптимизировать рабочие параметры трактора и сменного оборудования для достижения равномерного и максимально высокого качества работы. Стратегия регулирования "Урожайность" направлена на оптимизацию урожайности. Кроме того, можно задать средневзвешенное значение из всех или из комбинаций вышеназванных стратегий через по меньшей мере один рабочий параметр.
Оптимизационные целевые установки могут содержать по меньшей мере одну целевую установку "Производительность на единицу площади", "Расход на единицу площади", "Урожайность на единицу площади", "Затраты на единицу площади" и/или "Качество работы". Выбираемые оптимизационные целевые установки дают возможность комплексу автоматики подъемного механизма основывать оптимизацию на специфических отдельных аспектах, в частности, в различной комбинации друг с другом. Оптимизационная целевая установка "Затраты на единицу площади" может учитывать, например, прежде всего, затраты на персонал, топливо, возмещение износа, наработку и т.п. Оптимизационная целевая установка "Производительность на единицу площади" может быть направлена, например, прежде всего, на увеличение обрабатываемой площади и/или обработанной массы исходных материалов. Оптимизационная целевая установка "Качество работы" направлена, прежде всего, например, на заделку пожнивных остатков в почву, окомкование, прикатывание почвы, качество корма, рыхление почвы, уменьшение неровности почвы и т.п.
Через выбор стратегии регулирования и/или одной оптимизационной целевой установки или нескольких оптимизационных целевых установок происходит комплексная оптимизация общей системы, состоящей из трактора и сменного оборудования, как единого целого, регулировкой установочных параметров подъемного механизма посредством комплекса автоматики подъемного механизма. В данном контексте "комплексная оптимизация" означает, что, в отличие от предшествующего уровня техники, управление заданием параметров подъемного механизма основывается не только на управлении по позиции, управлении по тяговому усилию или на смешанном управлении по позиции и тяговому усилию, но также учитывает воздействия, возникающие, например, из-за разброса эффективности и/или из-за эксплуатационных качеств трансмиссии, в т.ч. ходового механизма трактора. Предпочтительно при этом также учитывается разброс эффективности, имеющий место на практике при различных условиях эксплуатации.
Предпочтительно, управляющий модуль трактора вместе с системой помощи водителю может образовывать комплекс автоматики подъемного механизма, в котором процессор предназначен для автономного определения параметров с целью реализации соответственно выбранной стратегии регулирования и/или оптимизационной целевой установки и для передачи управляющему модулю трактора этих параметров, влияющих на по меньшей мере один подлежащий заданию рабочий параметр. Далее, комплекс автоматики подъемного механизма содержит по меньшей мере один подъемный механизм и его исполнительные устройства для регулировки верхней тяги и нижней тяги посредством задания и адаптации установочных параметров подъемного механизма.
В частности, параметрами, подлежащими учету для оптимизированного управления по меньшей мере одним подъемным механизмом, могут быть рабочие параметры трактора, рабочие параметры трансмиссии трактора, рабочие параметры сменного оборудования и/или определяемые окружающими условиями параметры внешней среды. Предпочтительно в оптимизированное управление включены по меньшей мере рабочие параметры трансмиссии и сменного оборудования, так как они обычно могут быть определены непосредственно на тракторе и его трансмиссии или на сменном оборудовании. Далее, комплекс автоматики подъемного механизма может собрать, определить или получить параметры внешней среды, что позволит сделать выводы о преобладающем в данный момент состоянии подлежащей обработке почвы, по которой перемещается трактор и соединенное с ним сменное оборудование.
Предпочтительно, по меньшей мере на тракторе могут быть расположены сенсорные устройства, выполненные с возможностью определения рабочих параметров и/или параметров внешней среды. Кроме того, на сменном оборудовании может быть расположено по меньшей мере одно сенсорное устройство, предназначенное, по меньшей мере, для определения специфических рабочих параметров сменного оборудования. Для этого сменное оборудование может быть соединено с трактором посредством беспроводных или проводных средств связи, чтобы передавать данные с по меньшей мере одного сенсорного устройства сменного оборудования в систему помощи водителю для оценки и учета при оптимизации посредством комплекса автоматики подъемного механизма. При этом одним из сенсорных устройств может быть, например, датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Также одним из сенсорных устройств может быть датчик положения для определения положения компонентов подъемного механизма и/или сменного оборудования и/или датчик рабочей глубины. Сенсорные устройства для определения рабочих параметров трактора относятся непосредственно к трансмиссии или ее компонентам, таким как механизм отбора мощности или вспомогательные агрегаты. По меньшей мере один подъемный механизм трактора имеет сенсорные устройства для определения усилий и перемещений верхней тяги и нижних тяг. Также по меньшей мере один подъемный механизм может быть оснащен датчиком положения для определения рабочей высоты. Далее, на тракторе и/или сменном оборудовании могут быть расположены дополнительные сенсорные устройства, предназначенные для определения рабочей информации или рабочих параметров трактора и/или сменного оборудования, а также для определения и/или получения параметров внешней среды. При этом одним из сенсорных устройств может быть, например, датчик скорости, датчик наклона, оптический датчик и/или датчик местоположения. Посредством датчика наклона можно определить, например, наклон трактора и/или сменного оборудования в продольном и/или поперечном направлении. Отсюда можно сделать выводы о преобладающей топологии в соответствующей рабочей ситуации. Эта рабочая информация может быть дополнена и/или верифицирована данными, полученными от датчика местоположения.
Согласно предпочтительному дальнейшему развитию подъемный механизм может включать в себя по меньшей мере одно исполнительное устройство, выполненное как цилиндр подъемного механизма, с привязанной к этому исполнительному устройству системой измерения усилия.
Далее, подъемный механизм может включать в себя по меньшей мере одну подъемную стойку переменной длины с привязанной к этой подъемной стойке системой измерения усилия.
Далее, предпочтительно, подъемный механизм может включать в себя систему измерения усилия на установочных деталях для сменного оборудования, расположенных на концах нижних тяг.
Результирующие усилия подъемного механизма, передаваемые или действующие со стороны сменного оборудования на трактор, в частности, в горизонтальном и/или вертикальном направлении, относятся к группе установочных параметров подъемного механизма. Эти усилия могут быть определены, в частности, из давления в цилиндрах подъемного механизма и/или давления в гидравлической верхней тяге, из продольного усилия на верхней тяге и/или сигналов от штыревого датчика усилия на подъемном механизме, из внутренних усилий между трактором и сменным оборудованием, из продольных усилий на подъемных стойках и из текущей геометрии подъемного механизма. Положение нижних тяг на подъемном механизме, а также длина и положение верхней тяги на подъемном механизме являются - наряду с усилиями -дальнейшими установочными параметрами подъемного механизма. Вертикальные и горизонтальные внутренние усилия между трактором и сменным оборудованием могут быть измерены в точке сцепки трактора со сменным оборудованием и/или непосредственно на сменном оборудовании. Текущая геометрия подъемного механизма, т.е. среди прочего положение верхней тяги и нижних тяг, положение подъемного рычага, длина подъемных стоек, выбранное положение отверстий в подъемных стойках, формирует дальнейшие установочные параметры подъемного механизма.
В частности, система помощи водителю может быть выполнена с возможностью получения внешней информации для определения рабочих параметров и/или параметров внешней среды. Внешняя информация может быть получена, например, от других рабочих машин, внешней системы управления фермой (англ.: «Farm Management System») или, в общем случае, из Интернета.
Далее, в запоминающем устройстве может быть сохранена функциональная модель трактора и сменного оборудования, представляющая, по меньшей мере, часть функциональных взаимосвязей трактора и сменного оборудования. Так, посредством функциональной модели можно моделировать различные рабочие ситуации трактора и соединенного с ним сменного оборудования, чтобы в соответствующей рабочей ситуации и с учетом выбранной стратегии регулирования и/или выбранной оптимизационной целевой установки (выбранных оптимизационных целевых установок) обеспечить оптимизированное управление исполнительными устройствами по меньшей мере одного подъемного механизма посредством комплекса автоматики подъемного механизма. Как альтернатива, для представления по меньшей мере части функциональных взаимосвязей возможны также чистые модели черного ящика, основанные, например, на искусственном интеллекте (ИИ) или нейронных сетях, или какие-то смешанные формы.
При этом для отображения функциональных взаимосвязей трактора по меньшей мере одному установочному параметру подъемного механизма может быть назначено по меньшей мере одно n-мерное поле характеристик, причем соответствующий установочный параметр подъемного механизма определен как выходная переменная по меньшей мере одного n-мерного поля характеристик. С помощью по меньшей мере одного n-мерного поля характеристик можно описать сложные функциональные взаимосвязи общей системы, состоящей из трактора, сменного оборудования и окружающей среды, с небольшими вычислительными усилиями. Характеристические кривые n-мерного поля характеристик могут быть гибко адаптированы к соответствующей ситуации, чтобы при использовании трактора и сменного оборудования учесть как единое целое взаимосвязи и окружающие условия, влияющие на стратегии регулирования и/или на оптимизационную целевую установку (оптимизационные целевые установки) и, таким образом, на соответствующую требуемую настройку по меньшей мере одного установочного параметра подъемного механизма. Адаптацию характеристических кривых n-мерного поля характеристик осуществляет при этом комплекс автоматики подъемного механизма.
При этом по меньшей мере один или несколько рабочих параметров трактора, сменного оборудования и/или один или несколько определяемых окружающими условиями параметров внешней среды могут формировать входные переменные по меньшей мере одного n-мерного поля характеристик. Так, рабочие параметры, такие как положение подъемного механизма и возникающая в результате рабочая глубина, сигналы от сенсорных устройств подъемного механизма, выполненных как штыревые датчики тягового усилия, настройки усилителя тяги, а также усилия в переходном устройстве сменного оборудования могут формировать входные переменные n-мерного поля характеристик. Рабочую глубину может определять - альтернативно или дополнительно - по меньшей мере одно сенсорное устройство, предусмотренное на сменном оборудовании. Далее, входными переменными могут быть рабочие параметры: выходная мощность по меньшей мере одного приводного двигателя, частота вращения двигателя, передаточное отношение коробки передач, выходная мощность коробки передач, загрузка коробки передач, приводная мощность по меньшей мере одного вспомогательного агрегата и/или по меньшей мере одного механизма отбора мощности, величина проскальзывания между грунтозацепами трактора и почвой, поведение приводного усилия, поток мощности в трансмиссии механизма отбора мощности и/или поток мощности в гидравлической и/или электрической трансмиссии. Входными переменными на базе внешней информации могут быть погода, а также вид почвы, тип почвы, состояние почвы или влажность почвы. Эта информация может быть получена из внешних источников и/или задана оператором вручную через интерфейс ввода системы помощи водителю. Далее, входными переменными, по меньшей мере, n-мерного поля характеристик могут быть размер и тип шин на осях трактора, собственный вес трактора, балластировка трактора, геометрия трактора. Рассчитанные или измеренные рабочие параметры, такие как приводные усилия, усилия на колесах и крутящие моменты на колесах, а также нагрузки на оси трактора, могут быть также входными переменными, по меньшей мере, n-мерного поля характеристик.
Далее, входными переменными по меньшей мере n-мерного поля характеристик могут быть рабочие параметры сменного оборудования, такие как тип сменного оборудования, вес сменного оборудования, геометрия сменного оборудования, вид переходного устройства сменного оборудования, т.е. навесное или прицепное оборудование, рабочая ширина сменного оборудования, специфические для сменного оборудования заданные рабочие параметры, например, ширина передней борозды, точка приложения тягового усилия, давление на опорную поверхность, рабочая глубина и т.п.
Вышеупомянутые рабочие параметры трактора и сменного оборудования, а также параметры внешней среды могут быть либо измерены непосредственно (в абсолютных или относительных единицах измерения), либо рассчитаны на основе других значений (в абсолютных или относительных единицах измерения), сохранены в полях характеристик или получены из внешних источников, например, с помощью карт с географической привязкой или посредством получения облачной онлайн-информации, т.е. предоставлены на внешних системах обработки данных.
Согласно предпочтительному дальнейшему развитию процессор может сравнивать по меньшей мере одно n-мерное поле характеристик во время текущей работы, в частности, циклически, с условиями эксплуатации трактора и сменного оборудования, предпочтительно при этом, что по меньшей мере одно n-мерное начальное поле характеристик для по меньшей мере одного установочного параметра подъемного механизма сохранено в запоминающем устройстве и что процессор при первом определении по меньшей мере одного установочного параметра подъемного механизма выполняет определение на основе начального поля характеристик.
При этом процессор может быть выполнен с возможностью проведения адаптации проявления начального поля характеристик к существующим условиям эксплуатации посредством применения определенных рабочих параметров, по меньшей мере, трактора, в частности, также соединенного с ним сменного оборудования, или посредством перемещения к опорным точкам на начальном поле характеристик. Дополнительно измеренные, полученные или иным образом определенные параметры внешней среды могут быть использованы для проведения адаптации проявления начального поля характеристик к существующим условиям эксплуатации. Если в n-мерном пространстве начального поля характеристик измеренные параметры отсутствуют или их недостаточно, причем при стандартной работе трактора они не могут быть получены, то вместо них можно использовать опорные точки. На основе начального поля характеристик может быть проведена адаптация проявления по меньшей мере одного n-мерного поля характеристик к текущим условиям эксплуатации посредством задания заранее определенных рабочих точек, представляющих собой опорные точки на по меньшей мере одном n-мерном поле характеристик.
Во время работы трактора точное проявление по меньшей мере одного n-мерного поля характеристик может быть адаптировано к текущим условиям эксплуатации посредством определения по меньшей мере одного из параметров, содержащихся на n-мерном поле характеристик. В рабочем режиме трактора с соединенным с ним сменным оборудованием, т.е. при обработке поля, условия эксплуатации могут сильно меняться, что может быть своевременно обнаружено и учтено комплексом автоматики подъемного механизма с целью оптимизации работы в соответствии с выбранной стратегией регулирования и/или выбранной оптимизационной целевой установкой (выбранными оптимизационными целевыми установками). "Своевременно" здесь означает, что комплекс автоматики подъемного механизма может реагировать на изменения в течение интервала времени, зависящего от рабочих переменных и времени реакции исполнительных устройств по меньшей мере одного подъемного механизма так, чтобы изменить по меньшей мере один установочный параметр подъемного механизма.
В соответствии с предпочтительным вариантом осуществления изобретения система помощи водителю может быть реализована на основе облачного сервиса данных. При этом информацию, генерируемую сенсорными устройствами трактора и/или сменного оборудования, а также внешнюю информацию передают в облачный сервис и обрабатывают там посредством алгоритмов. Обработанные данные как данные, подлежащие передаче, в зависимости от выбранной стратегии регулирования поступают в комплекс автоматики подъемного механизма. Альтернативно или дополнительно внешний процессор может обрабатывать данные, в частности, внешнюю информацию от поставщиков услуг, с помощью алгоритма и передавать обработанные данные как данные, подлежащие передаче, в зависимости от выбранной стратегии регулирования в комплекс автоматики подъемного механизма.
Далее, поставленная вначале задача решена способом эксплуатации трактора согласно ограничительной части дополнительного независимого пункта 20 формулы изобретения с отличительными признаками пункта 20 формулы изобретения.
Согласно дополнительному независимому пункту 20 формулы изобретения способ эксплуатации трактора с по меньшей мере одним подъемным механизмом, имеющим верхнюю тягу, а также нижнюю тягу и связанные с ними исполнительные устройства, и с по меньшей мере одним соединенным с подъемным механизмом сменным оборудованием, содержащего оптимизирующую работу по меньшей мере трактора систему помощи водителю, оснащенную процессором, запоминающим устройством и по меньшей мере одним интерфейсом ввода, причем посредством процессора обрабатывают информацию, генерируемую внутренними для машины сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве, и причем осуществляют управление и регулировку трактора и/или по меньшей мере одного сменного оборудования посредством управляющего модуля трактора и/или сменного оборудования, причем система помощи водителю содержит комплекс автоматики подъемного механизма, работающий на базе характеристических кривых, причем этот комплекс автоматики подъемного механизма выполняет оптимизированную настройку по меньшей мере одного рабочего параметра трактора в зависимости от сохраненных в запоминающем устройстве выбираемых стратегий регулирования и/или оптимизационных целевых установок. В частности, комплекс автоматики подъемного механизма выполняет оптимизированную настройку по меньшей мере одного установочного параметра по меньшей мере одного подъемного механизма как рабочего параметра трактора в зависимости от сохраненных в запоминающем устройстве выбираемых стратегий регулирования и/или оптимизационных целевых установок.
Способ эксплуатации трактора может иметь все признаки, описанные в связи с трактором согласно изобретению по пп. 2-19 формулы изобретения по отдельности или в комбинации.
Краткое описание чертежей
Настоящее изобретение более подробно описано ниже со ссылкой на показанный на чертежах вариант осуществления изобретения.
Показано:
Фиг. 1 - схематичное представление трактора и соединенного с трактором сменного оборудования;
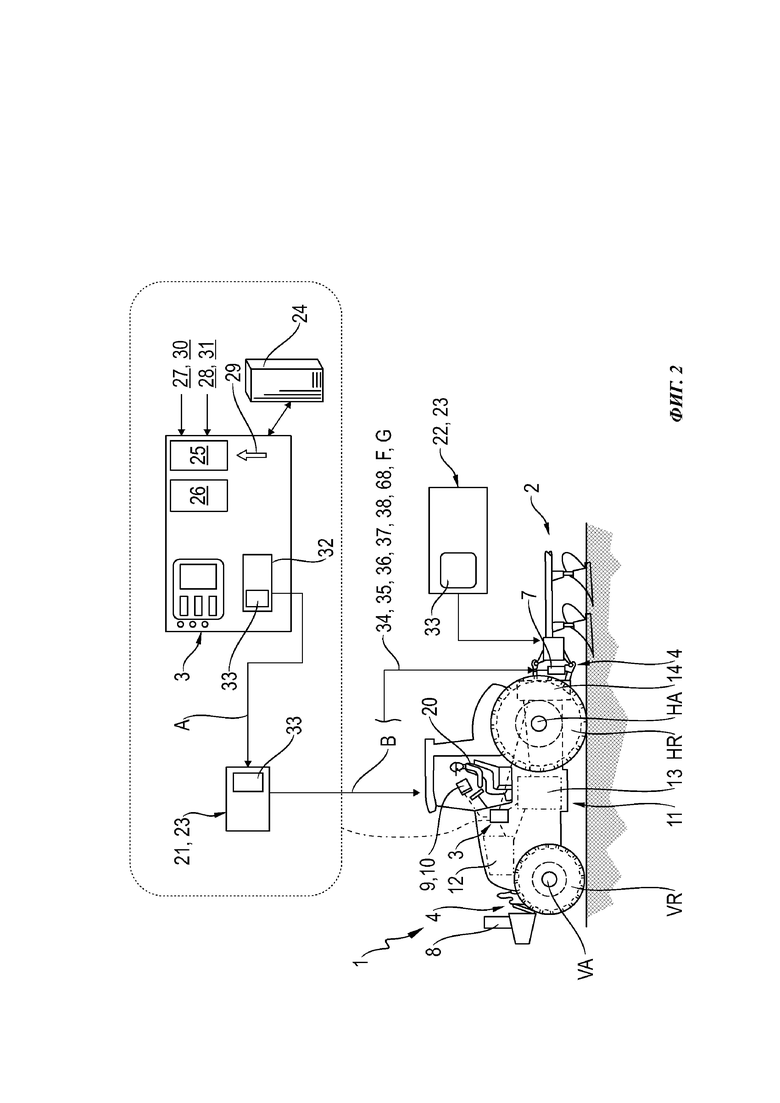
Фиг. 2 - схематичное представление трактора согласно фиг. 1 и системы помощи водителю;
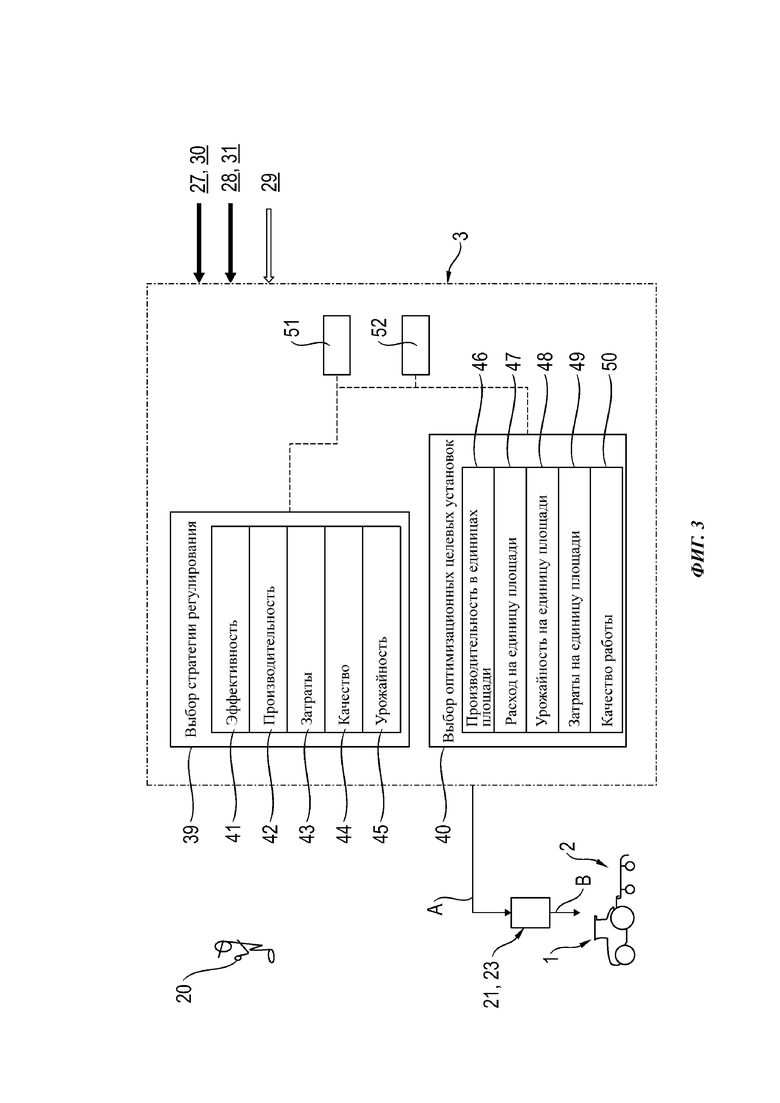
Фиг. 3 - детальный вид системы помощи водителю;
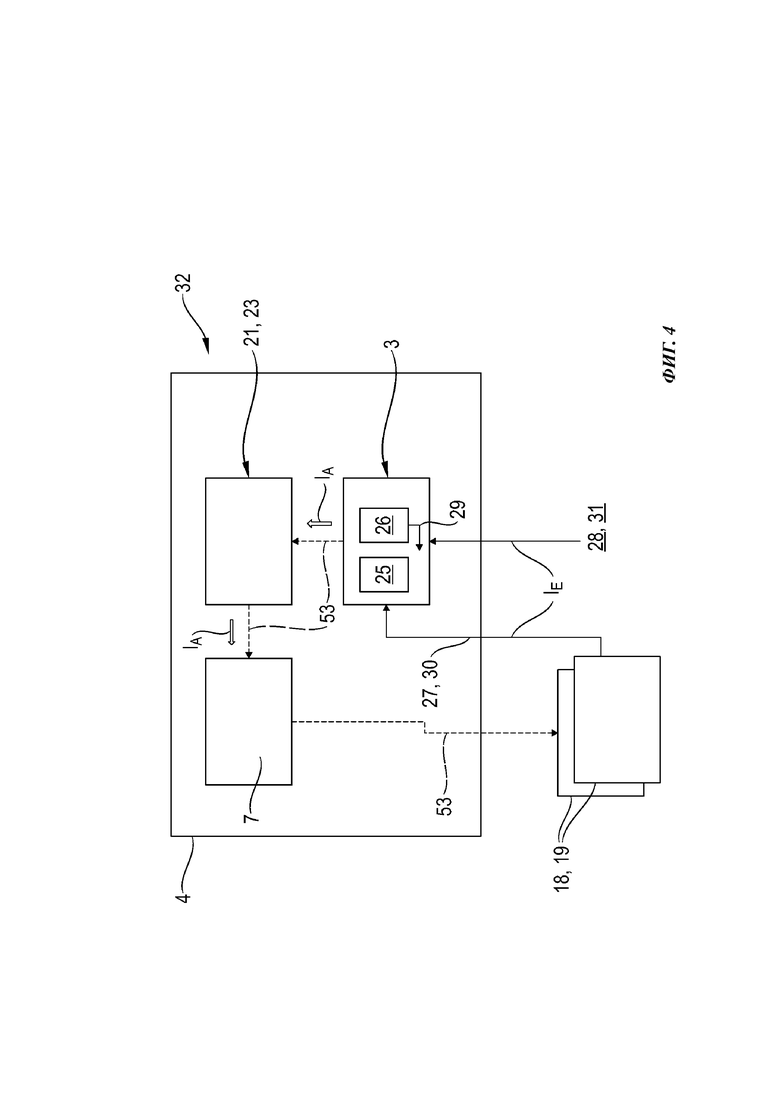
Фиг. 4 - схематичное представление структуры комплекса автоматики подъемного механизма;
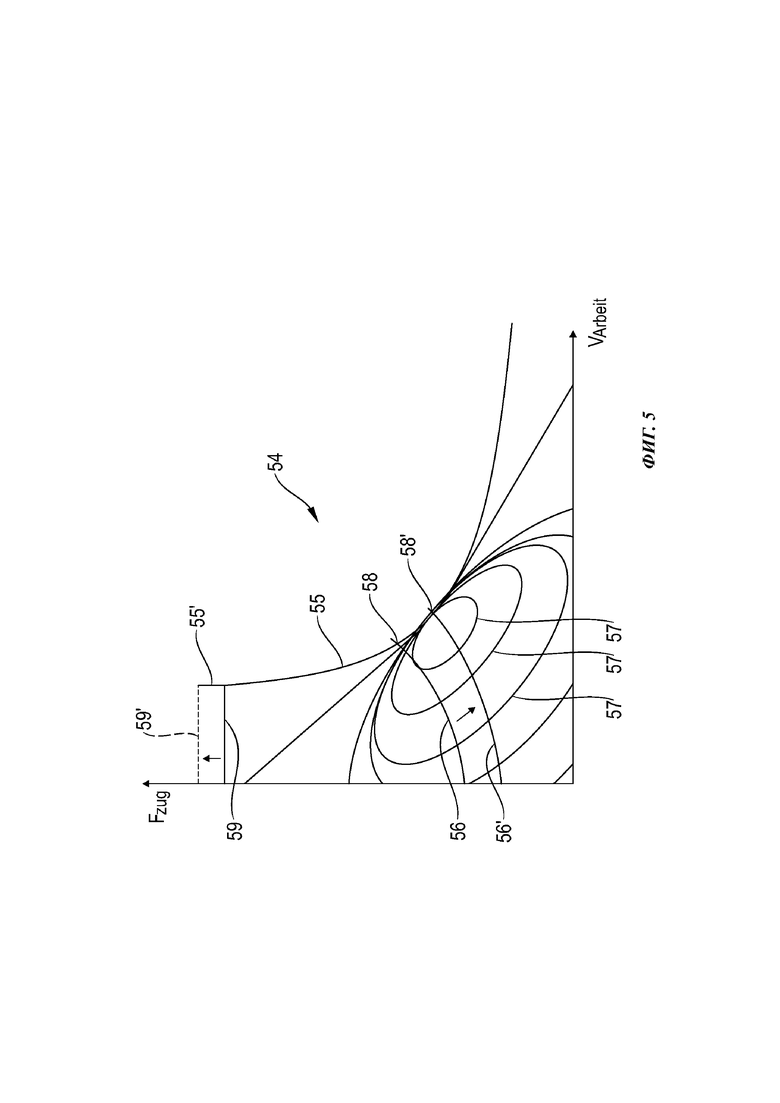
Фиг. 5 - пример n-мерного поля характеристик для управления подъемным механизмом трактора;
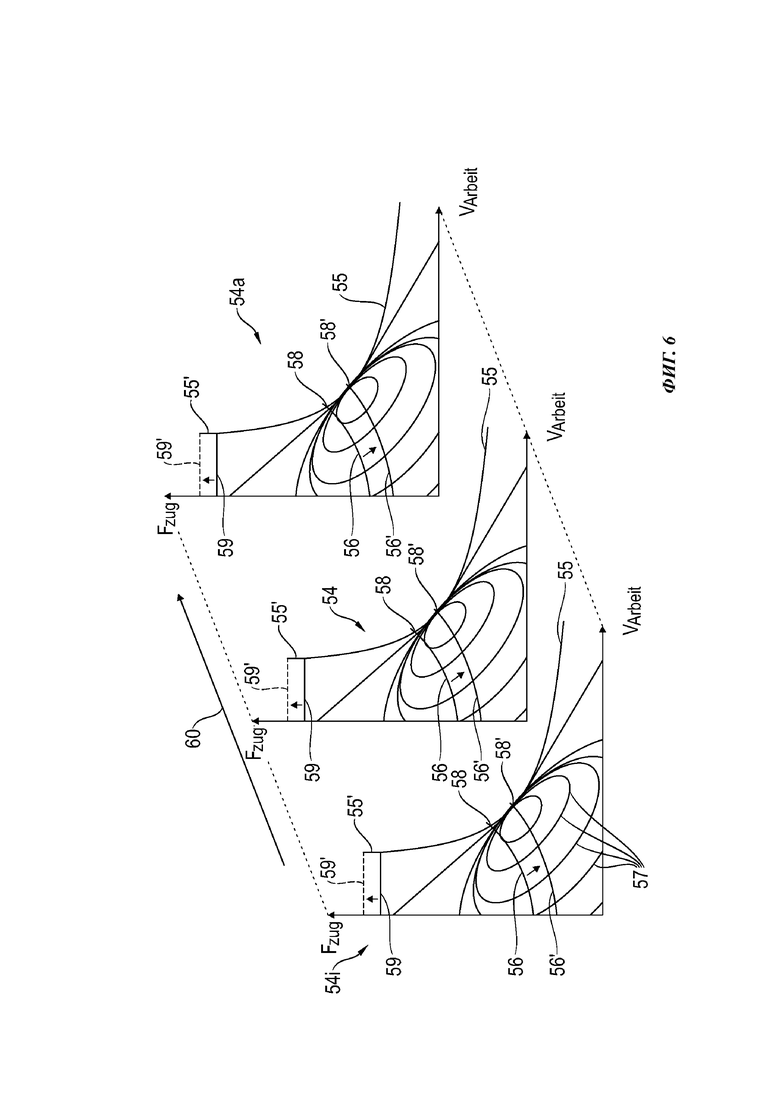
Фиг. 6 - пример начального поля характеристик, адаптируемого в связи с изменением рабочего параметра трактора; и
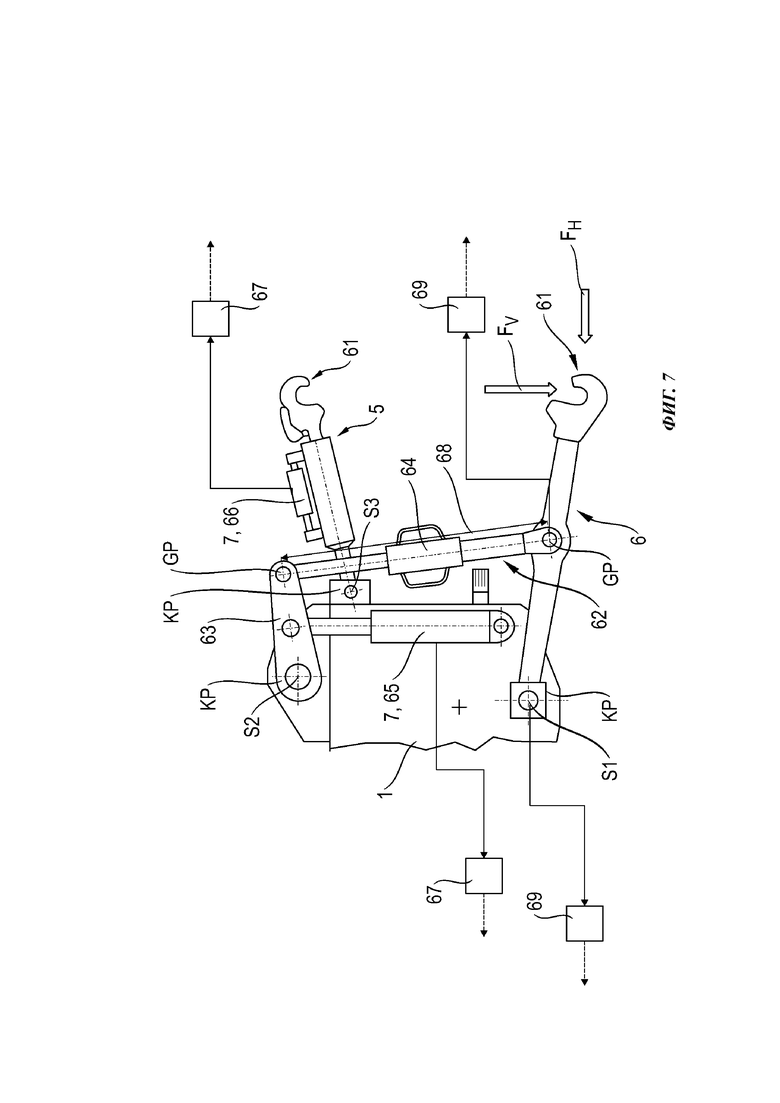
Фиг. 7 - схематичный вид сбоку подъемного механизма трактора, выполненного как трехточечный подъемник.
Осуществление изобретения
На фиг. 1 показан пример того, как трактор 1 выполняет рабочее задание, в данном случае обработку почвы, посредством сменного оборудования 2 для выполнения или поддержки сельскохозяйственной работы, в данном случае посредством сменного оборудования 2 в виде плуга. Трактор 1 оснащен системой 3 помощи водителю, выполненной с возможностью, среди прочего, сбора, обработки и вывода данных, относящихся к сельскохозяйственному рабочему заданию. Трактор 1 содержит по меньшей мере один подъемный механизм 4, имеющий верхнюю тягу 5, а также нижнюю тягу 6 и связанные с ними исполнительные устройства 7, из которых исключительно как пример показано только одно. Сменное оборудование 2 соединено с подъемным механизмом 4, расположенным в задней части трактора 1. В передней части трактора 1 может быть предусмотрен еще один - показанный частично - подъемный механизм 4, имеющий в показанном примере варианта осуществления изобретения балластный груз 8 для балластировки. В частности, подъемный механизм 4 может быть выполнен как трехточечный подъемник. В этом случае нижние тяги 6 прикреплены к трактору 1 посредством горизонтальных валов или пальцев, ориентированных поперечно направлению движения. На свободных концах нижних тяг 6 закреплено сменное оборудование 2. Вес сменного оборудования 2 может быть перенесен на заднюю ось НА, что увеличивает тяговое усилие и, следовательно, тяговую мощность трактора 1. Подъем нижних тяг 6 осуществляет гидроцилиндр либо непосредственно, либо посредством рычажной системы; эту комбинацию в общем случае называют исполнительными устройствами 7. На больших тракторах 1 в качестве исполнительного устройства 7 может быть по одному гидроцилиндру на каждую нижнюю тягу 6. Используют гидроцилиндры одинарного или двойного действия. При использовании гидроцилиндров одинарного действия в роли исполнительного устройства 7 выступает только собственный вес сменного оборудования 2. Гидроцилиндры двойного действия как исполнительные устройства 7 имеют то преимущество, что наряду с весом на сменное оборудование 2 может быть передано давление.
Далее над нижними тягами 6 по центру установлена верхняя тяга 5, позволяющая регулировать наклон сменного оборудования 2. Направленный назад конец верхней тяги 5 является третьей точкой трехточечной подвески. Верхняя тяга 5 может быть выполнена в виде ходового винта, удлиняемого или укорачиваемого без демонтажа. У более тяжелых тракторов 1 и более тяжелого сменного оборудования 2 длину верхней тяги 5 можно регулировать также под нагрузкой гидроцилиндрами двойного действия, действующими как исполнительные устройства 7.
Система 3 помощи водителю имеет по меньшей мере один интерфейс 9 ввода. Как и здесь, интерфейс 9 ввода может быть выполнен как по меньшей мере одно устройство 10 ввода для ввода данных со стороны оператора и, в частности, может быть соединен с клавиатурой, сенсорным экраном и/или микрофоном. Устройство 10 ввода может быть частью трактора 1, сменного оборудования 2 и/или мобильного устройства.
Трактор 1 имеет трансмиссию 11. Трансмиссия 11 содержит по меньшей мере один приводной двигатель 12, коробку передач 13, по меньшей мере один механизм 14 отбора мощности и по меньшей мере один вспомогательный агрегат 15. Приводной двигатель 12 выполнен здесь и предпочтительно всегда как двигатель внутреннего сгорания. Возможны альтернативные варианты приводного двигателя 12, например, электродвигатель или гидромотор. Управление приводным двигателем 12 происходит посредством блока 16 управления двигателем. Коробка передач 13 выполнена как коробка передач, переключаемая под нагрузкой, или как бесступенчатая коробка передач. Управление коробкой передач 13 происходит посредством блока 17 управления коробкой передач. По меньшей мере один механизм 14 отбора мощности выполнен как вал отбора мощности, дающий возможность приведения в действие сменного оборудования 2. Вал отбора мощности в качестве механизма 14 отбора мощности может быть предусмотрен как в передней, так и в задней части трактора 1. По меньшей мере один вспомогательный агрегат 15 может быть выполнен как вентилятор двигателя, являющийся частью устройства охлаждения приводного двигателя 12. Далее, трансмиссия 11 может включать в себя гидравлическую трансмиссию и/или электрическую трансмиссию. При этом, например, гидронасос и гидромотор или генератор, а также электродвигатель могут образовывать дальнейшие вспомогательные агрегаты 15 трансмиссии 11. Гидравлическая трансмиссия предназначена среди прочего для приведения в действие по меньшей мере одного подъемного механизма 4, используемого для соединения сменного оборудования 2 с трактором 1.
Трактор 1 имеет переднюю ось VA и заднюю ось НА с расположенными на них грунтозацепами в форме колес VR, HR и/или в форме по меньшей мере одного гусеничного ходового механизма. К передней оси VA и/или задней оси НА привязано по меньшей мере одно сенсорное устройство 18, дающее возможность определить усилие, создаваемое ходовым механизмом и действующее на одной из осей VA, НА.
К трансмиссии 11 привязаны дальнейшие сенсорные устройства 18, предназначенные для определения рабочих параметров трансмиссии 11 или ее различных компонентов. При этом дальнейшими сенсорными устройствами 18 могут быть, например, датчик частоты вращения, датчик крутящего момента, датчик давления или датчик усилия. Сенсорные устройства 18 для определения рабочих параметров трансмиссии 11 привязаны непосредственно к трансмиссии 11. Далее, к трактору 1 и/или к сменному оборудованию 2 могут быть привязаны дальнейшие сенсорные устройства 19, предназначенные для определения специфических рабочих параметров трактора 1 и/или сменного оборудования 2, которые могут быть определены также независимо от трансмиссии 11. При этом одним из дополнительных сенсорных устройств 19 может быть, например, датчик скорости, датчик наклона, оптический датчик и/или датчик местоположения. Далее, по меньшей мере одно из дополнительных сенсорных устройств 19 может быть предназначено для приема и/или определения спутниковой или поддерживаемой спутником информации, например, геоданных или данных о растительности, которые могут быть как внешней информацией 28, так и сохраненной в запоминающем устройстве 26 информацией 29, такой как, например, топографические данные, данные планирования маршрута и т.п.Кроме того, по меньшей мере одно из дополнительных сенсорных устройств 19 может быть выполнено с возможностью определения данных, позволяющих сделать выводы о свойствах почвы или грунта, по которому двигается трактор 1 со сменным оборудованием 2.
Через устройство 10 ввода оператор 20 трактора 1 может ввести дальнейшие параметры, в частности, эксплуатационные, рабочие и/или экологические параметры, которые не могут быть определены автоматически, например, вид и/или тип трактора и/или сменного оборудования, и передать их в систему 3 помощи водителю.
На фиг. 2 показано схематичное представление трактора 1 согласно фиг. 1 и системы 3 помощи водителю. К трактору 1 и сменному оборудованию 2 привязан один или несколько управляющих модулей 21, 22 для управления трактором 1 и/или соответствующим сменным оборудованием 2 и задания их параметров. В рамках изобретения трактор 1 и сменное оборудование 2 могут быть оснащены либо отдельными управляющими модулями 21, 22 для управления, либо общим управляющим устройством 23. Общее управляющее устройство 23 может быть расположено на тракторе 1 или на сменном оборудовании 2 или быть мобильным, благодаря чему оператор 20 трактора 1 будет иметь возможность перемещения общего управляющего устройства 23. Система 3 помощи водителю может быть выполнена также на основе облака данных, когда данные могут быть сохранены с возможностью вызова и редактирования вместо запоминающего устройства 26, по меньшей мере, частично во внешнем, пространственно удаленном запоминающем устройстве внешнего сервера или внешнего процессора 29. Внешний процессор 29 может быть частью облачного сервиса данных, предоставляемого сторонним поставщиком.
Система 3 помощи водителю согласно изобретению наряду с интерфейсом 9 ввода содержит по меньшей мере один процессор 25 и одно запоминающее устройство 26. Процессор 25 обрабатывает информацию 27, генерируемую сенсорными устройствами 18, 19 трактора 1 и/или сменного оборудования 2, внешнюю информацию 28 и информацию 29, которая может быть сохранена в запоминающем устройстве 26. Информация 27, генерируемая сенсорными устройствами 18, 19 или получаемая от них, включает в себя параметры 30 внешней среды, к которым среди прочего относятся вид почвы, тип почвы, состояние почвы, влажность почвы, топография, а также погода. Параметры 30 внешней среды доступны частично также как внешняя информация или как поступающие извне параметры 31 внешней среды, что, в частности, может быть применимо к погоде или топографическим данным.
Сенсорные устройства 18, 19 трактора 1 и/или сменного оборудования 2 передают генерируемую информацию 27 прямо или косвенно в систему 3 помощи водителю. Процессор 25 предназначен для оценки генерируемой информации 27. Связь между блоком 16 управления двигателем, блоком 17 управления коробкой передач, сенсорными устройствами 18, 19, а также отдельными управляющими модулями 21, 22 или управляющим устройством 23 и системой 3 помощи водителю может происходить по различным каналам связи, например, через шинную систему трактора 1 или сменного оборудования 2 или через беспроводную систему связи.
Система 3 помощи водителю содержит комплекс 32 автоматики подъемного механизма, работающий на базе характеристических кривых, выполняющий оптимизированную настройку посредством задания рабочих параметров трактора 1, влияющих на вертикальное усилие, действующее на ходовом механизме. Для этого в запоминающем устройстве 26 системы 3 помощи водителю сохранено по меньшей мере одно n-мерное поле 54 характеристик, более подробно раскрытое на основе иллюстрации согласно фиг. 5. В частности, комплекс 32 автоматики подъемного механизма рассчитан на оптимизированную настройку по меньшей мере одного установочного параметра по меньшей мере одного подъемного механизма 4 как рабочего параметра трактора 1 в зависимости от сохраненных в запоминающем устройстве 26 выбираемых стратегий регулирования и/или оптимизационных целевых установок. В простейшем случае это осуществляется посредством того, что комплекс 32 автоматики подъемного механизма вырабатывает управляющие сигналы А, передаваемые по меньшей мере на управляющий модуль 21 трактора 1 или на управляющее устройство 23, где они определяют управление подъемным механизмом 4 посредством выработки соответствующих управляющих сигналов В. Тракторы 1 обычно имеют один передний подъемный механизм и один задний подъемный механизм, позволяющие задавать их параметры совместно или независимо друг от друга посредством комплекса 32 автоматики подъемного механизма.
Управляющий модуль 21 трактора 1 или альтернативно общее управляющее устройство 23 трактора 1 и соединенного с ним сменного оборудования 2 вместе с системой 3 помощи водителю образуют комплекс 32 автоматики подъемного механизма. При этом система 3 помощи водителю может включать в себя привязанный к комплексу 32 автоматики подъемного механизма поддерживающий программный модуль 33, оптимизирующий режим работы трактора 1 и сменного оборудования 2 посредством оптимизации управления исполнительными устройствами 7 по меньшей мере одного подъемного механизма 4 с соединенным с ним сменным оборудованием 2. Поддерживающий программный модуль 33 может быть альтернативно или дополнительно сохранен с возможностью его вызова в управляющем модуле 21 трактора 1 или в управляющем модуле 22 сменного оборудования 2. Поддерживающий программный модуль 33 содержит алгоритмы и т.п., дающие возможность управления трактором 1, а также сменным оборудованием 2. Кроме того, в рамках изобретения требуемый поддерживающий программный модуль 33 может быть сохранен также централизованно на внешнем процессоре 24, не раскрываемом здесь более подробно, или в другой вспомогательной СУБД, например, на основе облака данных, и может быть вызван через канал связи, в частности, двунаправленный канал связи, между трактором 1 и внешним процессором 24.
Оптимизация по меньшей мере одного рабочего параметра посредством комплекса 32 автоматики подъемного механизма включает в себя учет влияния на соединенное с подъемным механизмом 4 сменное оборудование 2, а также на двунаправленную передачу усилий между трактором 1 и сменным оборудованием 2. При этом вид или тип сменного оборудования 2 имеет большое значение. Такое сменное оборудование 2 как, например, почвообрабатывающие орудия - плуг или культиватор, оказывает иное влияние на эффективность тяги, чем такое сменное оборудование 2 как, например, распределители удобрений или навесные сеялки, не контактирующие напрямую с почвой или создающие лишь небольшие горизонтальные усилия по сравнению с почвообрабатывающим оборудованием. По меньшей мере одним рабочим параметром является по меньшей мере один установочный параметр 34 подъемного механизма из группы, охватывающей положение 35 на подъемном механизме верхней тяги 5 и нижних тяг 6, усилие 36 на нижней тяге, длину 37 верхней тяги 5, усилие 38 на верхней тяге, длину 68 подъемной стойки 62, усилия F, а также геометрию G подъемного механизма. Изменение по меньшей мере одного установочного параметра 34 подъемного механизма происходит через управление исполнительными устройствами 7 посредством управляющего сигнала В.
В этом случае комплекс 32 автоматики подъемного механизма, работающий на базе характеристических кривых, выполняет оптимизированное управление исполнительными устройствами 7 в зависимости от сохраненных в запоминающем устройстве 26 выбираемых стратегий 39 регулирования и/или оптимизационных целевых установок 40. После выбора стратегии 39 регулирования и/или одной или нескольких оптимизационных целевых установок 40 происходит - посредством регулировки по меньшей мере одного из установочных параметров 34 подъемного механизма с помощью комплекса 32 автоматики подъемного механизма - комплексная оптимизация общей системы, состоящей из трактора 1 и сменного оборудования 2. В данном контексте "комплексная оптимизация" означает, что в отличие от предшествующего уровня техники управление заданием параметров подъемного механизма, т.е. установочных параметров 34 подъемного механизма, основывается не только на управлении по позиции, управлении по тяговому усилию или на смешанном управлении по позиции и тяговому усилию, но также учитывает воздействия, возникающие, например, из-за разброса эффективности и/или из-за эксплуатационных качеств трансмиссии 11, в т.ч. ходового механизма трактора 1, содержащего переднюю ось VA и заднюю ось НА, а также расположенные на них грунтозацепы. Предпочтительно, при этом также учитывается разброс эффективности, имеющий место на практике при различных условиях эксплуатации.
На фиг. 3 показан детальный вид системы 3 помощи водителю трактора 1, причем визуальные, эксплуатационные и структурные аспекты объединены в одном и том же представлении. Для оптимизации режима работы комплекса 32 автоматики подъемного механизма трактора 1 система 3 помощи водителю содержит выбираемые стратегии 39 регулирования, причем выбираемые стратегии 39 регулирования могут быть стратегиями, специфическими для трактора, стратегиями, специфическими для сменного оборудования, и/или их комбинацией. Эффективную оптимизацию управления комплексом 32 автоматики подъемного механизма трактора 1 с учетом соединенного с ним сменного оборудования 2 получают, когда выбираемые стратегии 39 регулирования включают в себя по меньшей мере одну из стратегий регулирования "Эффективность" 41, "Производительность" 42, "Затраты" 43, "Качество" 44, а также "Урожайность" 45. При этом в соответствии со стратегией регулирования "Эффективность" 41 происходит оптимизация расхода на единицу площади (литры/га) и/или требуемого для обработки рабочего времени. Стратегия регулирования "Производительность" 42 основана на оптимизации производительности в расчете на единицу площади сельскохозяйственных угодий (га/ч). Использование стратегии регулирования "Затраты" 43 позволяет оптимизировать затраты на единицу площади (евро/га). Использование стратегии регулирования "Качество" 44 позволяет оптимизировать рабочие параметры трактора 1 и сменного оборудования 2 для достижения равномерного и максимально высокого качества работы. Кроме того, можно задать средневзвешенное значение из всех или из комбинаций вышеназванных стратегий через по меньшей мере один рабочий параметр.
Далее, система 3 помощи водителю содержит выбираемые оптимизационные целевые установки 40 для оптимизации режима работы трактора 1 посредством оптимизации управления исполнительными устройствами 7 по меньшей мере одного подъемного механизма 4. Оптимизационные целевые установки 40 могут быть выбраны оператором 20 альтернативно или дополнительно к стратегиям регулирования 39.
Оптимизационные целевые установки 40 могут содержать целевые установки "Производительность на единицу площади" 46, "Расход на единицу площади" 47, "Урожайность на единицу площади" 48, "Затраты на единицу площади" 49 и/или "Качество работы" 50. Выбираемые оптимизационные целевые установки 40 дают возможность комплексу 32 автоматики подъемного механизма основывать оптимизацию установочных параметров 34 подъемного механизма на специфических отдельных аспектах, в частности, в различной комбинации друг с другом. Оптимизационная целевая установка "Затраты на единицу площади" 49 может учитывать, например, прежде всего, затраты на персонал, топливо, возмещение износа, наработку и т.п. Оптимизационная целевая установка "Производительность на единицу площади" 46 может быть направлена, например, прежде всего, на увеличение обрабатываемой площади и/или обработанной массы исходных материалов. Оптимизационная целевая установка "Качество работы" 50 направлена, прежде всего, например, на заделку пожнивных остатков в почву, окомкование, прикатывание почвы, качество корма, рыхление почвы, уменьшение неровности почвы и т.п.
Система 3 помощи водителю может быть также выполнена так, чтобы работать либо в режиме 51 диалога с оператором 20, либо в автоматическом режиме 52. В обоих случаях связь - диалог с оператором 20 - происходит на естественном языке.
Управляющий модуль 21 трактора 1 вместе с системой 3 помощи водителю образует комплекс 32 автоматики подъемного механизма, причем процессор 25 системы 3 помощи водителю предназначен - с целью реализации соответственно выбранной стратегии 39 регулирования и/или оптимизационной целевой установки 40 - для автономного определения или получения сведений в виде генерируемой информации 27, внешней информации 28, сохраненной в запоминающем устройстве 26 информации 29, определяющих рабочие параметры подъемного механизма 4, трансмиссии 11, трактора 1, сменного оборудования 2, а также для автономного определения или получения параметров 30, 31 внешней среды из преобладающих в данный момент окружающих условий и для передачи их управляющему модулю 21 для управления исполнительными устройствами 7. Это может быть сделано посредством передачи управляющих сигналов А на управляющий модуль 21 или на управляющее устройство 23, передающих затем соответствующий управляющий сигнал В на исполнительные устройства 7.
На фиг. 4 показан схематичный вид структуры комплекса 32 автоматики подъемного механизма. Комплекс 32 автоматики подъемного механизма содержит по меньшей мере один подъемный механизм 4, соответствующие исполнительные устройства 7 для регулировки нижней тяги 6 и верхней тяги 5, управляющий модуль 21 или управляющее устройство 23, а также систему 3 помощи водителю. Управляющие сигналы В поступают от управляющего модуля 21 по шине 53 данных на исполнительные устройства 7, дающие возможность управлять по меньшей мере одним из исполнительных устройств 7 подъемного механизма 4. Привязанное к подъемному механизму 4 сенсорное устройство 19 контролирует исполнительные устройства 7, чтобы на основе полученных от исполнительных устройств 7 данных иметь возможность определить соответствующие заданные установочные параметры 34 подъемного механизма, положение 35 на подъемном механизме нижних тяг 6, усилие 36 на нижней тяге, длину 37 верхней тяги 5, усилие 38 на верхней тяге. Сенсорное устройство 19 предоставляет свои полученные как генерируемая информация 27 данные по шинной системе 53 по меньшей мере системе 3 помощи водителю для оценки. Кроме того, система 3 помощи водителю получает генерируемую другими сенсорными устройствами 18 информацию 27 и параметры 30 внешней среды, внешнюю информацию 28 и поступающие извне параметры 31 внешней среды, которые могут быть получены трактором 1, например, от других рабочих машин и/или от внешнего процессора 24 на сельскохозяйственной площадке и которые могут влиять на сельскохозяйственный рабочий процесс. Данные, поступающие от сенсорных устройств 18, 19, генерируемая информация 27, а также внешняя информация 28, сохраненная в запоминающем устройстве 26 информация 29 и параметры 30, 31 внешней среды образуют входные переменные IE комплекса 32 автоматики подъемного механизма. IA обозначает выходные переменные комплекса 32 автоматики подъемного механизма, используемые как основа для выработки управляющих сигналов А или В. Комплекс 32 автоматики подъемного механизма автономно оптимизирует режим работы подъемного механизма 4, т.е. комплекс 32 автоматики подъемного механизма выполнен с возможностью непрерывного автономного определения и непрерывной передачи требуемых регулировок установочных параметров 34 подъемного механизма на исполнительных устройствах 7 подъемного механизма 4. Комплекс 32 автоматики подъемного механизма обеспечивает рабочие параметры, в частности, установочные параметры 34 подъемного механизма, для трактора 1, оптимально адаптированные к соответствующим условиям эксплуатации и уборки урожая.
На фиг. 5 показан пример n-мерного поля 54 характеристик для управления исполнительными устройствами 7 подъемного механизма 4 трактора 1. В запоминающем устройстве 26 сохранена функциональная модель трактора 1 и сменного оборудования 2, представляющая, по меньшей мере, часть функциональных взаимосвязей трактора 1 и сменного оборудования 2, соединенного с подъемным механизмом 4. Также для представления, по меньшей мере, части функциональных взаимосвязей трактора 1 и сменного оборудования 2 возможны также чистые модели черного ящика, основанные, например, на искусственном интеллекте (ИИ) или нейронных сетях, или какие-то смешанные формы. Чтобы отобразить функциональные взаимосвязи трактора 1 и сменного оборудования 2, рабочим параметрам - тяговая характеристика 55, 55' трактора 1 и тяговая характеристика 56, 56' сменного оборудования 2 в зависимости от по меньшей мере одного установочного параметра 34 подъемного механизма, в частности всех установочных параметров 34 подъемного механизма, - назначено по меньшей мере одно n-мерное поле 54 характеристик, причем по меньшей мере один установочный параметр 34 подъемного механизма определен как выходная переменная IA по меньшей мере одного n-мерного поля 54 характеристик. Тяговые характеристики 55 и 56 получены для первого задания по меньшей мере одного установочного параметра 34 подъемного механизма, а тяговые характеристики 55' и 56' получены для второго задания, отличного от первого, по меньшей мере одного установочного параметра 34 подъемного механизма, n-мерное поле 54 характеристик содержит, в частности, по меньшей мере три входные переменные IE.
На поле 54 характеристик в качестве входных переменных IE показаны рабочая скорость VArbeit и тяговое усилие FZug. Выходной переменной IA является по меньшей мере один установочный параметр 34 подъемного механизма. Ссылочные обозначения 55, 55' и 56, 56' показывают тяговые характеристики трактора 1 и сменного оборудования 2 при различно заданных установочных параметрах 34 подъемного механизма, представленные на n-мерном поле 54 характеристик соответственно как пример. 59 или 59' обозначает соответствующее максимальное тяговое усилие трактора 1 для различно заданных установочных параметров 34 подъемного механизма. Далее на заднем плане представлены линии 57 постоянного удельного расхода топлива в форме так называемых "топограмм". Соответствующая точка пересечения тяговой характеристики 56, 56' сменного оборудования 2 с тяговой характеристикой 55 или 55' трактора 1 определяет рабочую точку 58 или 58', получаемую при полной нагрузке при различных заданиях установочных параметров 34 подъемного механизма. Линии 57 постоянного удельного расхода топлива могут быть рассчитаны для конкретного рабочего состояния при известной конфигурации трансмиссии 11.
Так, например, изменение установочных параметров 34 подъемного механизма приводит к увеличению тягового усилия FZug трактора 1, начиная с максимального тягового усилия 59 согласно тяговой характеристике 55 до максимального тягового усилия 59' согласно тяговой характеристике 55' трактора 1. В соответствии с этим, тяговая характеристика 56, установленная при первом задании установочных параметров 34 подъемного механизма, смещается в сторону тяговой характеристики 56' сменного оборудования 2, установленной при втором задании установочных параметров 34 подъемного механизма.
Конкретное рабочее состояние может быть задано определяемыми рабочими параметрами трактора 1, в частности, трансмиссии 11, по меньшей мере одного вспомогательного агрегата 15 трансмиссии 11, сменного оборудования 2 и/или обусловленными окружающими условиями параметрами 30, 31 внешней среды, к которым среди прочего относятся вид почвы, тип почвы, состояние почвы, влажность почвы, топография, а также погода. Определение рабочих параметров может быть выполнено измерением, расчетом или иным способом. Рабочие параметры трансмиссии 11, по меньшей мере одного вспомогательного агрегата 15, сменного оборудования 2, гидравлической трансмиссии, электрической трансмиссии и/или параметры 30, 31 внешней среды, определенные на основе преобладающих в данный момент окружающих условий, образуют параметры, подлежащие учету для оптимизированного управления исполнительными устройствами 7 подъемного механизма 4, т.е. параметры, учитываемые комплексом 32 автоматики подъемного механизма с целью оптимального управления.
Базовое знание характеристики тягового усилия FZug трактора 1, требуемого тягового усилия для сменного оборудования 2 и энергопотребления в зависимости от рабочей скорости VArbeit для различных граничных условий позволяют построить n-мерное поле 54 характеристик. Когда трактор 1 работает, точное проявление n-мерного поля 54 характеристик может быть адаптировано к текущим условиям работы посредством определения одного из параметров, нанесенных на поле 54 характеристик. Знание поля 54 характеристик позволяет комплексу 32 автоматики подъемного механизма автоматически задавать установочный параметр или установочные параметры 34 подъемного механизма так, чтобы оптимизировать системное поведение трактора 1 и сменного оборудования 2 в соответствии с целевой установкой, полученной из выбранной стратегии 39 регулирования и/или оптимизационной целевой установки 40. Регулирующими переменными являются при этом установочные параметры 34 подъемного механизма.
Изменение установочных параметров 34 подъемного механизма влияет на положение тяговых характеристик 55, 55' или 56, 56' на поле 54 характеристик и, таким образом, на передаваемую мощность. Линии 57 постоянного удельного энергопотребления могут быть рассчитаны для некоторого рабочего состояния при известной конфигурации трансмиссии. Соответствующие рабочие состояния могут быть определены или установлены в описанном примере осуществления изобретения, например, посредством следующих параметров:
- Положение подъемного механизма
- Рабочая глубина сменного оборудования
- Сигналы от сенсорных устройств 19 в подъемном механизме 4, выполненных как штыревые датчики тягового усилия
- Уставки усилителя тяги
- Усилия в переходном устройстве сменного оборудования
- Различное значение проседания частоты вращения двигателя
- Различное значение давления воздуха в шинах
- Различное управление вспомогательным агрегатом 15
- Выходная мощность приводного двигателя 12
- Выходная мощность коробки передач 13 или загрузка коробки передач
- Приводная мощность вспомогательного потребителя, определяемая по разности между выходной мощностью двигателя и выходной мощностью коробки передач 13 с учетом поля характеристик КПД коробки передач
- Поток мощности в механизме 14 отбора мощности
- Поток мощности в гидравлической трансмиссии
- Поток мощности в электрической трансмиссии
- Проскальзывание
- Угол наклона трактора
- Частота вращения двигателя
- Передаточное отношение коробки передач
- Теоретическая и фактическая скорость движения
- Размер и тип шин
- Угол наклона в поперечном и продольном направлении
- Геометрия трактора
- Вес сменного оборудования
- Геометрия сменного оборудования
- Тип сменного оборудования
- Вид почвы
- Тип почвы
- Состояние почвы
- Влажность почвы
Приведенные выше в списке, но не ограниченные этим списком рабочие и эксплуатационные параметры, которые в форме данных 28, 29, 30, по меньшей мере, частично представлены или могут быть представлены, а также параметры 31, 32 внешней среды влияют на оптимизированную настройку по меньшей мере одного рабочего параметра трактора 1, в частности установочных параметров 34 подъемного механизма по меньшей мере одного подъемного механизма 4.
Рабочие параметры трансмиссии 11 включают в себя среди прочего выходную мощность по меньшей мере одного приводного двигателя 12, выходную мощность коробки передач 13 или загрузку коробки передач, приводную мощность по меньшей мере одного вспомогательного агрегата 15 и/или по меньшей мере одного механизма 14 отбора мощности, величину проскальзывания между выполненными как грунтозацепы колесами VR, HR трактора 1, частоту вращения двигателя, скорость движения, передаточное отношение коробки передач, статус полного привода и/или блокировки дифференциала и/или поток мощности в трансмиссии механизма 14 отбора мощности, в гидравлической трансмиссии или в электрической трансмиссии. Так, например, приводная мощность по меньшей мере одного вспомогательного агрегата 15 может быть определена из разницы между выходной мощностью приводного двигателя 12 и выходной мощностью коробки передач 13 с учетом поля характеристик КПД коробки передач.
Дальнейшими рабочими параметрами трактора 1 являются среди прочего угол наклона трактора 1 в поперечном и продольном направлении, вес трактора 1, балластировка, размер шин и тип шин колес VR, HR на осях VA, НА, нагрузки на оси, усилия на колесах, крутящие моменты на колесах, параметры тяги, которые могут быть либо получены от одного из сенсорных устройств 18, 19, либо рассчитаны на основе данных, полученных от сенсорных устройств 18, 19, или на основе других полученных или сохраненных данных.
Далее, рабочие параметры сменного оборудования 2 могут включать в себя тип и/или вид сменного оборудования 2, рабочую ширину, положение подъема, рабочую глубину, а также дальнейшие установочные параметры сменного оборудования 2, например, ширину передней борозды, точку приложения тягового усилия, давление на опорную поверхность и т.п.
Параметрами 30, 31 внешней среды являются среди прочего вид почвы, тип почвы, состояние почвы, влажность почвы, топография, погода и т.п.
Процессор 25 может сравнивать по меньшей мере одно n-мерное поле 54 характеристик во время работы, в частности, циклически, с условиями эксплуатации трактора 1 и соединенного с ним сменного оборудования 2. Для этого преимущественно в запоминающем устройстве 26 может быть сохранено по меньшей мере одно n-мерное начальное поле 54i характеристик. Таким образом, процессор 25 системы 3 помощи водителю при первом получении установочных параметров 34 подъемного механизма после выбора стратегии 30 регулирования или оптимизационной целевой установки 40 может выполнить определение на основе начального поля 54i характеристик.
Далее, процессор 26 может быть выполнен с возможностью автономного проведения адаптации проявления начального поля 54i характеристик к существующим условиям эксплуатации посредством применения расчетных значений и/или измеренных рабочих параметров в форме генерируемой информации 27, внешней информации 28 и сохраненной в запоминающем устройстве 26 информации 29, а также параметров 30, 31 внешней среды или -альтернативно или дополнительно - посредством перемещения к опорным точкам на начальном поле 54i характеристик. На основе начального поля 54i характеристик посредством задания заранее определенных рабочих точек, представляющих собой опорные точки на начальном поле 54i характеристик, может быть проведена адаптация проявления начального поля 54i характеристик к текущим условиям эксплуатации, так что посредством этой адаптации будет сгенерировано поле 54i характеристик. Для этого на первом этапе расчетные значения или рабочие параметры, а также параметры 30, 31 внешней среды получают с помощью соответствующих сенсорных устройств 18, 19 и/или принимают как внешнюю информацию 28 и предварительно преобразуют посредством процессора 25. Определенные таким образом расчетные значения или рабочие параметры, например, частоту вращения, усилие, проскальзывание, скорость движения, вводят в n-мерное начальное поле 54i характеристик. В частности, расчетные значения или рабочие параметры могут быть введены в n-мерное начальное поле 54i характеристик, если они являются квазистационарными или достигли квазистационарного состояния.
Если в n-мерном пространстве начального поля 54i характеристик отдельные расчетные значения, определенные сенсорными устройствами 18, 19, отсутствуют, поскольку они не встречаются во время обычного движения по полю или поступают только в недостаточном количестве во время стандартной работы трактора 1 и/или сменного оборудования 2, то вместо них может быть активировано перемещение к специфическим опорным точкам. Второй этап содержит тестирование и адаптацию функциональной модели трактора 1 и сменного оборудования 2 на основе изменений текущих условий эксплуатации, определяемых, в свою очередь, посредством рабочих параметров, т.е. генерируемой информации 27, внешней информации 28 и сохраненной в запоминающем устройстве 26 информации 29, а также имеющихся в распоряжении параметров 30, 31 внешней среды.
Представление на фиг. 6 показывает исключительно как пример одно n-мерное начальное поле 54i характеристик, адаптируемое в качестве примера на основе изменения по меньшей мере одного рабочего параметра в трансмиссии 11. При по меньшей мере одном изменяющемся рабочем параметре речь идет в качестве примера о частоте вращения представляющего собой вентилятор двигателя вспомогательного агрегата 15, возрастающей при работе в зависимости от нагрузки приводного двигателя 12, как показано на фиг. 5 стрелкой 60. Увеличение 60 частоты вращения вентилятора двигателя как вспомогательного агрегата 15 ведет к адаптации начального поля 54i характеристик к полю 54 характеристик или далее к полю 54а характеристик, вновь адаптированному из-за с изменений рабочих условий, окружающих условий, рабочих параметров или т.п.
На фиг. 7 показан схематичный вид сбоку подъемного механизма 4 трактора 1, выполненного как трехточечный подъемник, имеющего две удлиненные нижние тяги 6, расположенные вдоль рядом друг с другом с заранее определенным расстоянием между тягами, и удлиненную верхнюю тягу 7, расположенную по центру в промежутке между нижними тягами 6 и приблизительно параллельно им. Нижние тяги 6 имеют передний продольный конец нижней тяги с расположенной на нем соответствующей установочной деталью 61, выполненной как открытый вверх захватный крюк, и задний продольный конец нижней тяги, закрепленный соответственно с возможностью вращения на точке сцепки KP трактора 1, так что нижние тяги 6 имеют возможность вращения вокруг проходящей поперечно продольному направлению трактора 1 и приблизительно горизонтально поворотной оси S1, благодаря чему соответствующую установочную деталь 61 или захватный крюк можно регулировать по высоте.
Нижние тяги 6 соединены с возможностью вращения посредством подъемной штанги или подъемной стойки 62 (на фиг. 7 показана только одна подъемная стойка 62), регулируемой по длине 68, с соответствующим подъемным рычагом 63 или подъемным валом (на фиг. 7 показан только один подъемный рычаг 63), установленном на тракторе 1 с возможностью вращения. Для этого соответствующая подъемная стойка 62 соединена с нижней тягой 6, а также с подъемным рычагом 63 в шарнирной точке GP. Подъемные рычаги 63 или подъемные валы закреплены на тракторе 1 с возможностью вращения вокруг проходящей приблизительно горизонтально поворотной оси S2. Регулировку длины соответствующей подъемной стойки 62 можно осуществлять, например, посредством выполненного как ходовой винт исполнительного механизма 64 вручную. Возможно также исполнение исполнительного механизма 64 как линейного привода. Чтобы обеспечить или запустить качательное движение подъемного рычага 63 и, соответственно, качательное движение соединенной с ним нижней тяги 6, для каждого подъемного рычага 63 предусмотрено выполненное как цилиндр 65 подъемного механизма исполнительное устройство 7, установленное одним продольным концом (шток поршня или цилиндр) с возможностью вращения на тракторе 1, а другим продольным концом (цилиндр или шток поршня) соединенное с возможностью вращения с подъемным рычагом 63. Благодаря возможности регулировки длины подъемной стойки 62 можно предварительно задать высоту соответствующей нижней тяги 6 или высоту ее установочных деталей 61. Длина 68 подъемной стойки 62 может быть другим установочным параметром 34 подъемного механизма из группы установочных параметров 34 подъемного механизма.
Верхняя тяга 5 подобно нижним тягам 6 имеет передний продольный конец верхней тяги с расположенной на нем соответствующей установочной деталью 61, выполненной как открытый вниз захватный крюк, и задний продольный конец верхней тяги, закрепленный соответственно с возможностью вращения вокруг поворотной оси S3 на точке сцепки KP трактора 1, что дает возможность вращения верхней тяги 5 и таким образом возможность регулировки высоты установочной детали 61. Хотя здесь не показано и не раскрыто более подробно, привод для качательного движения верхней тяги 5 может быть реализован подобно нижним тягам 6. Верхнюю тягу 5 можно регулировать по длине посредством выполненного предпочтительно как гидроцилиндр 66 исполнительного устройства 7.
По меньшей мере один рабочий параметр содержит по меньшей мере одно результирующее усилие F или один компонент FH, FV усилия, передаваемые от сменного оборудования 2 на трактор 1 и действующие в горизонтальном и/или вертикальном направлении, как они показаны исключительно в качестве примера на установочной детали 61 нижней тяги 6. Дальнейшие усилия возникают среди прочего соответственно на установочной детали 61 второй нижней тяги 6, а также на установочной детали 61 верхней тяги 5.
К исполнительным устройствам 7 привязана по меньшей мере одна система 67 измерения усилия. Предпочтительно каждое из исполнительных устройств 7 подъемного механизма 4 имеет систему 67 измерения усилия, определяющую усилия, воспринимаемые исполнительными устройствами 7 подъемного механизма 4, выполненными как цилиндры 65 подъемного механизма или как гидроцилиндры 66. Для этого приложенные или воспринимаемые усилия F или компоненты FH, FV усилий могут быть определены, например, по соответствующим значениям давления в цилиндрах 65 подъемного механизма или в гидроцилиндре 66. Кроме того, по меньшей мере, в точках сцепки KP могут быть расположены устройства для измерения усилия, например, штыревые датчики усилия. Сигналы, выдаваемые системами 67 измерения усилия, или данные, полученные в результате оценки (если системы 67 измерения усилия имеют собственный блок оценки результатов), поступают в систему 3 помощи водителю для дальнейшей обработки и преобразования.
Дополнительно или альтернативно к по меньшей мере одной из подъемных стоек 62 переменной длины может быть привязана дальнейшая система 69 измерения усилия. Система 69 измерения усилия предназначена для определения горизонтальных и/или вертикальных усилий FH, FV, воспринимаемых или передаваемых установочными деталями 61 или, соответственно, захватными крюками. Для этого могут быть установлены надлежащие устройства для измерения усилия, например, в шарнирных точках GP. Это позволяет определить продольные усилия в подъемных стойках 62.
Дополнительно по меньшей мере в точке сцепки KP расположены датчики положения, позволяющие определить, по меньшей мере, соответствующее положение верхней тяги 5, нижней тяги 6, а также подъемных рычагов 63. Данные о положении вместе с информацией о длине 37 верхней тяги 5, длине 68 подъемных стоек 62, длине нижних тяг 6, а также о других влияющих на геометрию переменных, дают возможность определить действующую в данный момент геометрию G подъемного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ ТЯГАЧА | 2021 |
|
RU2816600C2 |
| КОЛЕСНЫЙ ТЯГАЧ, СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ И СПОСОБ ЭКСПЛУАТАЦИИ КОЛЕСНОГО ТЯГАЧА | 2020 |
|
RU2812028C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ТЯГАЧОМ И ПЛУГОМ | 2020 |
|
RU2816410C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТЯГАЧ | 2020 |
|
RU2821862C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАКТОРОМ | 1991 |
|
RU2025299C1 |
| Мини-трактор "СТАВРОПОЛЕЦ" | 2024 |
|
RU2834933C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2667056C2 |
| Трактор | 1990 |
|
SU1717460A1 |
| Трактор колесный сельскохозяйственный с электромеханической трансмиссией | 2022 |
|
RU2814696C1 |
| ПОГРУЗЧИК НА ТРАКТОРЕ | 1994 |
|
RU2082295C1 |
Изобретение относится к сельскохозяйственным транспортным средствам. Трактор с подъемным механизмом, содержащим верхнюю и нижнюю тягу и связанные с ними исполнительные устройства, и соединенным с подъемным механизмом сменным оборудованием содержит систему помощи водителю. Система оснащена процессором, запоминающим устройством и интерфейсом ввода. Процессор обрабатывает информацию, генерируемую внутренними сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве. Трактор и/или сменное оборудование содержит управляющий модуль. Система помощи водителю содержит автоматику подъемного механизма, которая выполнена с возможностью работы на базе характеристических кривых и с возможностью оптимизированной настройки рабочего параметра трактора в зависимости от сохраненных выбираемых стратегий регулирования и/или оптимизационных целевых установок. Улучшается оптимизация рабочего режима трактора. 2 н. и 18 з.п. ф-лы, 7 ил.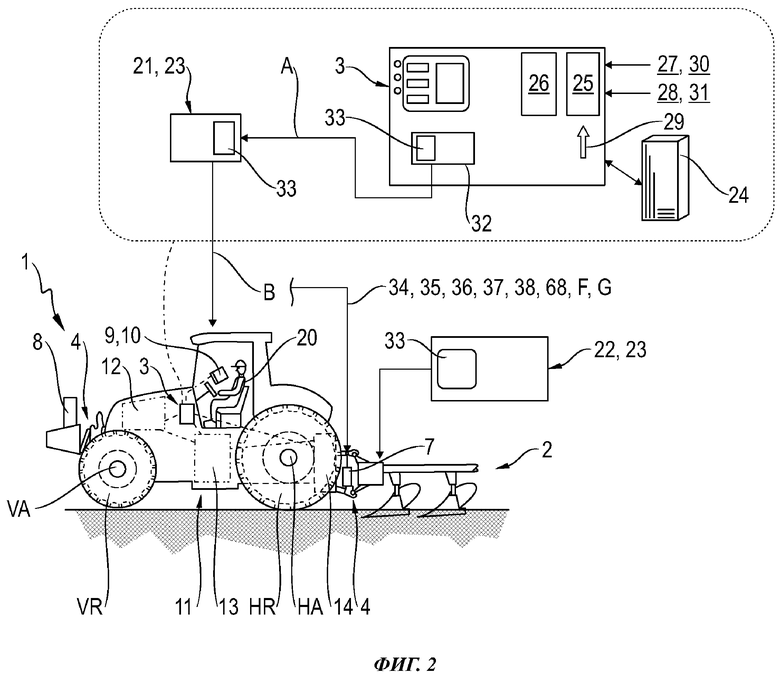
1. Трактор (1) с по меньшей мере одним подъемным механизмом (4), содержащим верхнюю тягу (5), а также нижнюю тягу (6) и связанные с ними исполнительные устройства (7), и с по меньшей мере одним соединенным с подъемным механизмом (4) сменным оборудованием (2), содержащий оптимизирующую работу по меньшей мере трактора (1) систему (3) помощи водителю, оснащенную процессором (25), запоминающим устройством (26) и по меньшей мере одним интерфейсом (9, 10) ввода, причем процессор (25) обрабатывает информацию, генерируемую внутренними для машины сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве (26), и причем трактор (1) и/или по меньшей мере одно сменное оборудование (2) содержит управляющий модуль (21, 22, 23) для управления и регулировки трактора (1) и/или сменного оборудования (2), отличающийся тем, что система (3) помощи водителю содержит комплекс (32) автоматики подъемного механизма, причем комплекс (32) автоматики подъемного механизма выполнен с возможностью работы на базе характеристических кривых, и причем комплекс (32) автоматики подъемного механизма выполнен с возможностью оптимизированной настройки по меньшей мере одного рабочего параметра трактора (1) в зависимости от сохраненных в запоминающем устройстве (26) выбираемых стратегий (39) регулирования и/или оптимизационных целевых установок (40).
2. Трактор (1) по п. 1, отличающийся тем, что оптимизация по меньшей мере одного рабочего параметра посредством комплекса (32) автоматики подъемного механизма включает в себя учет влияния на соединенное с подъемным механизмом (4) сменное оборудование (2), а также на двунаправленную передачу усилий между трактором (1) и сменным оборудованием (2).
3. Трактор (1) по п. 1 или 2, отличающийся тем, что по меньшей мере один рабочий параметр включает в себя по меньшей мере одно результирующее усилие или один компонент усилия, передаваемый от сменного оборудования (2) на трактор (1) и действующий в горизонтальном и/или вертикальном направлении.
4. Трактор (1) по одному из пп. 1-3, отличающийся тем, что по меньшей мере один рабочий параметр представляет собой по меньшей мере один установочный параметр (34) подъемного механизма из группы, содержащей положение (35) на подъемном механизме верхней тяги (5) и/или нижних тяг (6), действующее на подъемном механизме усилие (36) на нижних тягах (6), длину (37) верхней тяги (5) и/или нижних тяг (6), усилие (38) на верхней тяге, длину (68) подъемной стойки (62), геометрию (G) подъемного механизма.
5. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что выбираемая стратегия (39) регулирования включает в себя по меньшей мере одну стратегию "Эффективность" (41), "Производительность" (42), "Затраты" (43), "Качество" (44), "Урожайность" (45) или комбинацию стратегий "Эффективность" (41), "Производительность" (42), "Затраты" (43), "Качество" (44) и/или "Урожайность" (45).
6. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что оптимизационные целевые установки (40) включают в себя по меньшей мере одну целевую установку "Производительность на единицу площади" (46), "Расход на единицу площади" (47), "Урожайность на единицу площади" (48), "Затраты на единицу площади" (49) и/или "Качество работы" (50).
7. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что управляющий модуль (21, 23) трактора (1) вместе с системой (3) помощи водителю образует комплекс (32) автоматики подъемного механизма, в котором процессор (25) выполнен с возможностью автономного определения параметров с обеспечением реализации соответственно выбранной стратегии (39) регулирования и/или оптимизационной целевой установки (40) и передачи управляющему модулю (21, 23) трактора (1) этих параметров, влияющих на по меньшей мере один подлежащий заданию рабочий параметр.
8. Трактор (1) по п. 7, отличающийся тем, что параметрами, подлежащими учету для оптимизированного управления по меньшей мере одним подъемным механизмом (4), являются рабочие параметры трактора (1), рабочие параметры трансмиссии (11) трактора (1), рабочие параметры сменного оборудования (2) и/или определяемые окружающими условиями параметры (30, 31) внешней среды.
9. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что по меньшей мере на тракторе (1) расположены сенсорные устройства (18, 19), выполненные с возможностью определения рабочих параметров и/или параметров (30, 31) внешней среды.
10. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что подъемный механизм (6) содержит по меньшей мере одно исполнительное устройство (7), выполненное в виде цилиндра (65) подъемного механизма, с привязанной к этому исполнительному устройству (7) системой (67) измерения усилия.
11. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что подъемный механизм (6) содержит по меньшей мере одну подъемную стойку (62) переменной длины с привязанной к этой подъемной стойке (62) системой (67) измерения усилия.
12. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что подъемный механизм (6) содержит систему (69) измерения усилия, выполненную с возможностью измерения усилий на установочных деталях (61) для сменного оборудования (2), расположенных на концах нижних тяг (6).
13. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что система (3) помощи водителю выполнена с возможностью получения внешней информации (28) для определения рабочих параметров и/или параметров (30, 31) внешней среды.
14. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что в запоминающем устройстве (26) сохранена функциональная модель трактора (1) и сменного оборудования (2), представляющая по меньшей мере часть функциональных взаимосвязей трактора (1) и соединенного с ним сменного оборудования (2).
15. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что для отображения функциональных взаимосвязей трактора (1) по меньшей мере одному установочному параметру (34) подъемного механизма назначено по меньшей мере одно n-мерное поле (54) характеристик, причем соответствующий установочный параметр (34) подъемного механизма определен как выходная переменная (IA) по меньшей мере одного n-мерного поля (54) характеристик.
16. Трактор (1) по п. 15, отличающийся тем, что по меньшей мере один или несколько рабочих параметров трактора (1), сменного оборудования (2) и/или определяемых окружающими условиями параметров (30, 31) внешней среды формируют входные переменные (IE) по меньшей мере одного n-мерного поля (54) характеристик.
17. Трактор (1) по одному из пп. 15 или 16, отличающийся тем, что процессор (25) сравнивает по меньшей мере одно n-мерное поле (54) характеристик во время текущей работы, в частности, циклически, с условиями эксплуатации трактора (1) и сменного оборудования (2), предпочтительно при этом, что по меньшей мере одно n-мерное начальное поле (54i) характеристик для по меньшей мере одного установочного параметра (34) подъемного механизма сохранено в запоминающем устройстве (26), при этом процессор (25) при первом определении по меньшей мере одного установочного параметра (34) подъемного механизма выполняет определение на основе начального поля (54i) характеристик.
18. Трактор (1) по п. 17, отличающийся тем, что процессор (25) выполнен с возможностью адаптации проявления начального поля (54i) характеристик к существующим условиям эксплуатации посредством применения определенных рабочих параметров по меньшей мере трактора (1) или посредством перемещения к опорным точкам на начальном поле (54i) характеристик.
19. Трактор (1) по одному из предыдущих пунктов, отличающийся тем, что система (3) помощи водителю реализована на основе облачного сервиса данных.
20. Способ эксплуатации трактора (1) с по меньшей мере одним подъемным механизмом (4), содержащим верхнюю тягу (5), а также нижнюю тягу (6) и связанные с ними исполнительные устройства (7), и с по меньшей мере одним соединенным с подъемным механизмом (4) сменным оборудованием (2), содержащего оптимизирующую работу по меньшей мере трактора (1) систему (3) помощи водителю, оснащенную процессором (25), запоминающим устройством (26) и по меньшей мере одним интерфейсом (9, 10) ввода, причем посредством процессора (25) обрабатывают информацию, генерируемую внутренними для машины сенсорными системами, внешнюю информацию и информацию, которая может быть сохранена в запоминающем устройстве (26), и причем осуществляют управление и регулировку трактора (1) и/или по меньшей мере одного сменного оборудования (2) посредством управляющего модуля (21, 22, 23) трактора (1) и/или сменного оборудования (2), отличающийся тем, что система (3) помощи водителю содержит комплекс (32) автоматики подъемного механизма, работающий на базе характеристических кривых, причем комплекс (32) автоматики подъемного механизма выполняет оптимизированную настройку по меньшей мере одного рабочего параметра трактора (1) в зависимости от сохраненных в запоминающем устройстве (26) выбираемых стратегий (39) регулирования и/или оптимизационных целевых установок (40).
| СПОСОБ ВЫРАБОТКИ ХЛЕБНОГО КВАСА | 2015 |
|
RU2583543C1 |
| US 2017325394 A1, 16.11.2017 | |||
| DE 102007040344 A1, 22.01.2009 | |||
| US 2016039480 A1, 11.02.2016 | |||
| ВСПОМОГАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ САМОХОДНОЙ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2643250C2 |

