Перекрестные ссылки на родственные заявки
Настоящая Заявка представляет собой непредварительную Заявку, претендующую на приоритет предварительной Заявки на выдачу патента США No. 61/951,898, поданной 12 марта 20124 г. и предварительной Заявки на выдачу патента США No. 61/951,882, поданной 12 марта 2014 г., так что содержание этих предварительных Заявок включено сюда посредством ссылки во всей своей полноте.
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам сбора сейсмических данных. Для сбора геофизических данных такие системы используют следующие принципы: для проведения сейсмической разведки активизируют один или несколько сейсмических источников (взрывы, падающие грузы, вибраторы, воздушные пушки и т.п.) с целью вызвать распространение всенаправленных пакетов сейсмических волн; эти волновые пакеты, отраженные подповерхностными слоями, фиксируются сейсмоприемниками, генерирующими сигнал, характеризующий отражение волн от геологических поверхностей раздела в подповерхностных слоях.
Более конкретно, настоящее изобретение относится к способу автоматического назначения беспроводных устройств сбора сейсмических данных топографическим пунктам.
Настоящее изобретение может быть применено, в частности, в области разведки нефти с использованием сейсмических методов, но может также представлять интерес в какой-либо другой отрасли, реализующей системы сбора сейсмических данных.
Уровень техники
Обычно система сбора сейсмических данных содержит сеть связи, соединенную с центральной станцией.
В первом известном варианте реализации сеть связи содержит несколько проводных линий сбора данных (линий профилирования). Каждая проводная линия сбора данных имеет узлы и концентраторы, так что все данные могут быть приняты центральной станцией в реальном времени. Узлы объединены в серии вдоль телеметрического кабеля и ассоциированы каждый по меньшей мере с одним сейсмоприемником (в общем случае, со связками сейсмоприемников). Эти узлы обрабатывают сигналы, передаваемые сейсмоприемниками, и генерируют данные. Концентраторы объединены в серии вдоль телеметрического кабеля и ассоциированы каждый по меньшей мере с одним узлом. Каждый концентратор принимает данные, генерируемые узлами, с которыми он ассоциирован. Датчики представляют собой либо аналоговые датчики, либо цифровые датчики. При использовании аналоговых датчиков (также именуемых «геофонами») такие датчики в общем случае соединены кабелями для образования кластеров, именуемых «связками геофонов». Одна или несколько таких связок геофонов (последовательно или параллельно) соединены с каждым узлом (в таком случае этот узел именуется также «полевым оцифровывателем» (FDU ("Field Digitizing Unit"))), так что последний осуществляет аналого-цифровое преобразование сигнала от групп геофонов и передает эти данные в адрес центральной станции. При использовании цифровых датчиков (например, микромеханических акселерометров, именуемых также «цифровыми акселерометрами на основе микроэлектромеханических систем (MEMS)»), такие датчики объединяют в узлах (в таком случае этот узел именуется «блоком цифровых датчиков» (DSU, "Digital Sensor Unit")), исключая тем самым связки геофонов. Каждый узел объединяет один или несколько цифровых датчиков.
Во втором известном варианте реализации сеть содержит беспроводные устройства сбора сейсмических данных (также именуемые «удаленные модули сбора данных» (RAU ("Remote Acquisition Units"))). Каждое беспроводное устройство сбора сейсмических данных является независимым и ассоциированным с (т.е. соединено или объединяет одну или несколько функций) одним или несколькими упомянутыми выше узлами. Каждое беспроводное устройство сбора сейсмических данных осуществляет радиосвязь (непосредственно или через одно или несколько других беспроводных устройств сбора сейсмических данных и/или через один или несколько указанных выше концентраторов) с центральной станцией и/или с устройством сбора данных (переносимым оператором, также именуемым «сборщик» ("harvester") данных), если реализована стратегия сбора данных. Множество беспроводных устройств сбора сейсмических данных может составлять многопролетную ячеистую сеть радиосвязи, позволяющую беспроводным устройствам сбора сейсмических данных обмениваться данными между собой и с центральной станцией. Таким образом, каждое беспроводное устройство сбора сейсмических данных сохраняет свои собственные данные (т.е. данные, полученные от узлов, с которыми оно ассоциировано) и, в конечном счете, сохраняет также данные, принятые от одного или нескольких других беспроводных устройств сбора сейсмических данных (т.е. данные, полученные от узлов, ассоциированных с этими другими беспроводными устройств сбора сейсмических данных). Датчики представляют собой либо аналоговые датчики, либо цифровые датчики. При использовании аналоговых датчиков («геофонов») каждое беспроводное устройство сбора сейсмических данных объединяет, например, один или несколько указанных выше узлов (как описано выше для первого известного варианта реализации с применением геофонов). При использовании цифровых датчиков каждое беспроводное устройство сбора сейсмических данных соединено, например, с узлом, соединяющим один или несколько цифровых датчиков (как описано выше для первого известного варианта реализации с применением цифровых датчиков).
В последующем описании мы рассмотрим случай второго известного варианта реализации, т.е. сеть, содержащую беспроводные устройства сбора сейсмических данных.
Для проведения сейсморазведки беспроводные устройства сбора сейсмических данных размещают «в поле» в заданных пунктах, известных как «топографические пункты». При развертывании и подготовке беспроводных устройств сбора сейсмических данных к работе необходимо выполнить следующие три этапа (регистрация сейсмических данных начинается после выполнения этих этапов):
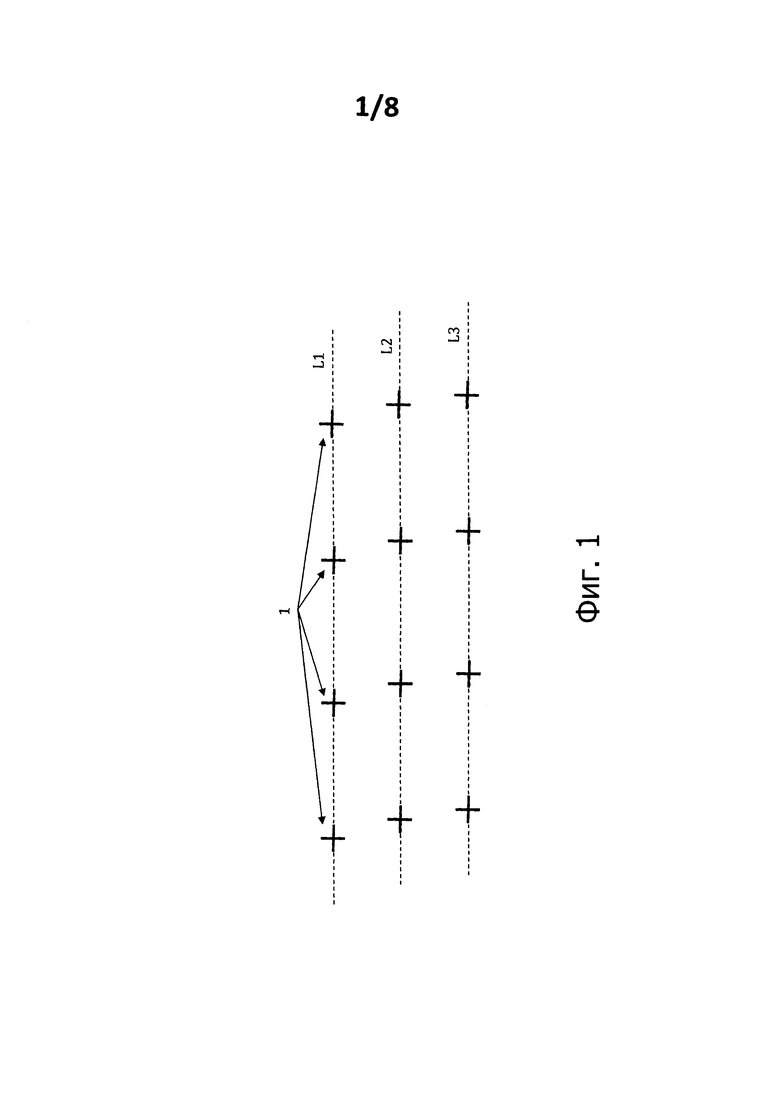
a) Геологи должны определить топографические пункты прежде, чем начнется развертывание беспроводных устройств сбора сейсмических данных. Эти топографические пункты имеют прецизионные позиции в поле (например, координаты в системе GPS или координаты в какой-либо другой глобальной навигационной системе GNSS), записанные в специальном файле (также именуемом файл "SPS" (файл сценария обработки оболочек ("Shell Processing Script"))). Топографические пункты в общем случае рассчитывают на центральной станции при «прорисовке» на земле сетки, вдоль линий которой располагаются эти пункты. В реальных условиях в поле могут быть заданы тысячи топографических пунктов. Они обозначены (провешены) на земле с использованием маркеров (вешек, флажков, пятен краски на земле и т.п.). Фиг. 1 иллюстрирует пример топографических пунктов, размещенных в виде сетки, содержащей линии L1-L3.
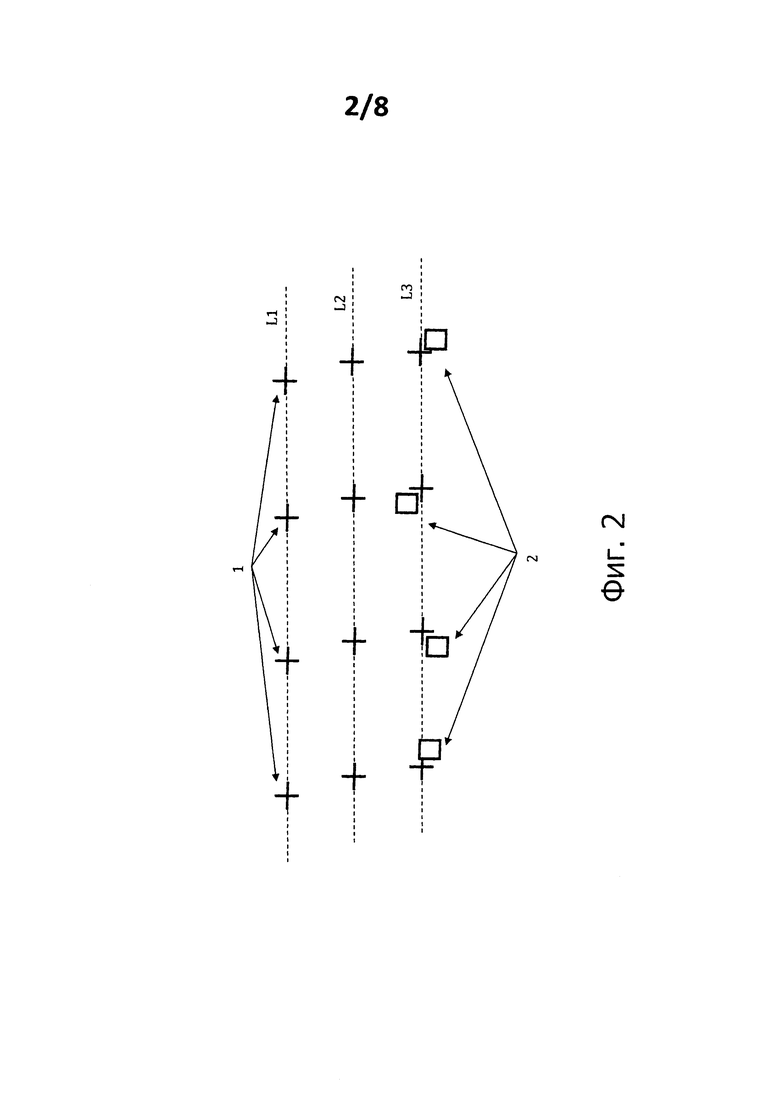
b) Во время проведения сейсморазведки беспроводные устройства сбора сейсмических данных развертывают во всех маркированных топографических пунктах. Другими словами, каждое беспроводное устройство сбора сейсмических данных устанавливают на земле рядом с маркированным топографическим пунктом. На фиг. 2 показан пример развертывания беспроводных устройств 2 сбора сейсмических данных рядом с маркированными топографическими пунктами 1 вдоль линий L1-L3.
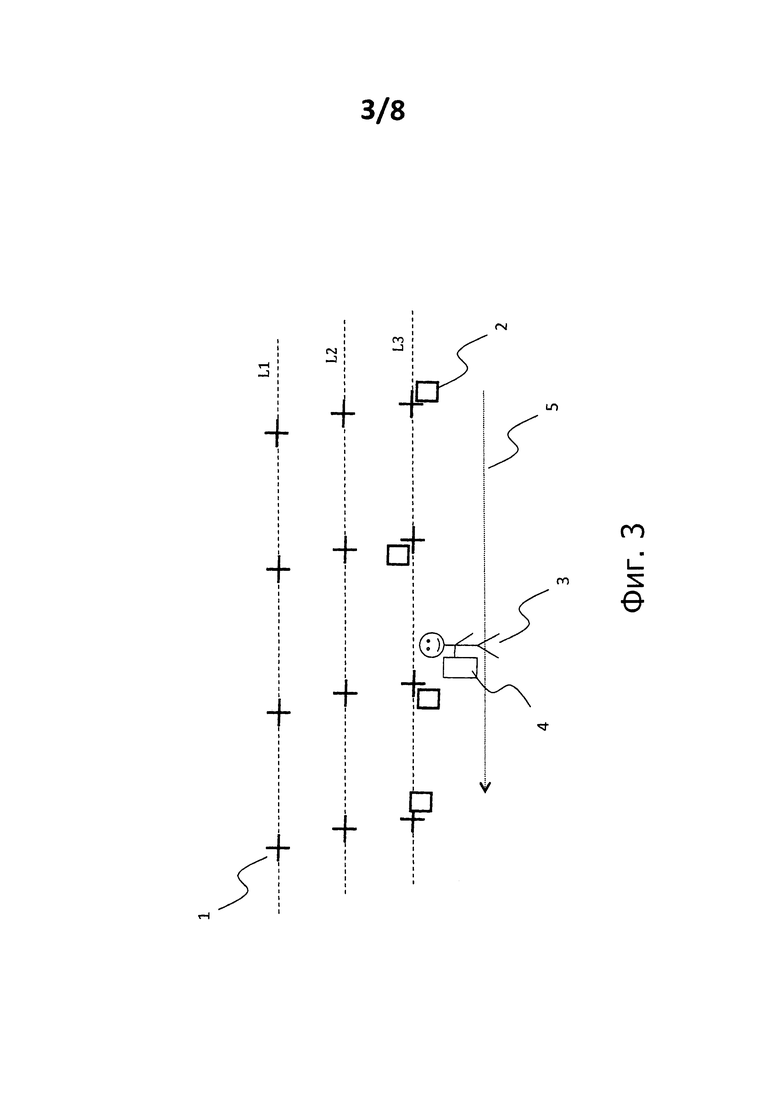
c) Когда беспроводные устройства сбора сейсмических данных уже развернуты, необходимо выполнить другой этап для идентификации этих устройств в поле. Это необходимо, чтобы знать, какое именно беспроводное устройство сбора сейсмических данных помещено в каком топографическом пункте. Этот этап называется «этапом назначения». Оператору нужно пройти вдоль линий, на которых располагаются эти беспроводные устройства сбора сейсмических данных (на каждой линии находится огромное число таких беспроводных устройств сбора сейсмических данных, причем каждое устройство отделено от другого устройства промежутком плановой величины). Затем с помощью внешнего устройства 4 оператор 3 записывает ассоциации между каждым из беспроводных устройств 2 сбора сейсмических данных и одним из топографических пунктов 1 (расположенным близко к этому беспроводному устройству сбора сейсмических данных). Большинство внешних устройств использует для идентификации указанных беспроводных устройств технологию радио идентификационных меток (RFID), так что нужно много людей, чтобы пройти вдоль всех беспроводных устройств сбора сейсмических данных со считывателями таких меток RFID. Фиг. 3 иллюстрирует ручное назначение беспроводных устройств пунктам, выполняемое оператором 3 и его внешним устройством 4, когда оператор идет вдоль линии L3 (как показано стрелкой поз. 5).
Недостаток этого известного трехступенчатого способа состоит в том, что прохождение вдоль линий и ручное ассоциирование беспроводных устройств сбора сейсмических данных с их топографическими пунктами требует затрат времени людей-операторов, а также расходов на оплату приобретения внешнего устройства для каждого человека-оператора. Иными словами, известный трехступенчатый способ представляет очень большое ограничение на развертывание беспроводных устройств сбора сейсмических данных. Из-за большого количества развертываемых беспроводных устройств сбора сейсмических данных может пройти несколько дней, прежде чем можно будет начать регистрацию сейсмических данных.
Другой недостаток состоит в том, что люди операторы могут делать ошибки при ручном вводе ассоциаций в свои внешние устройства.
Еще один недостаток заключается в том, что люди операторы в полевых условиях подвергаются воздействию разного рода неблагоприятных факторов, когда ходят по области, где осуществляется сейсморазведка.
Сущность изобретения
Один из конкретных вариантов настоящего изобретения предлагает способ автоматического назначения беспроводных устройств сбора сейсмических данных топографическим позициям. Каждое беспроводное устройство сбора сейсмических данных содержит приемник сигналов спутниковой навигационной системы. Способ содержит следующие этапы, выполняемые назначающим устройством:
- получение позиций топографических пунктов, в которых ожидается размещение беспроводных устройств сбора сейсмических данных;
- получение измеренных позиций беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, предоставленной приемниками сигналов спутниковой навигационной системы, когда рассматриваемые беспроводные устройства сбора сейсмических данных установлены на земле - каждое возле одного из топографических пунктов; и
- вычисление ассоциаций, каждая из которых установлена между одним из беспроводных устройств сбора сейсмических данных и одним из топографических пунктов, в функции результатов сравнения измеренных позиций с позициями топографических пунктов.
Общий принцип состоит в использовании преимуществ от наличия встроенного приемника сигналов спутниковой навигационной системы (приемник GNSS (приемник «глобальной спутниковой навигационной системы» ("Global Navigation Satellite System"))) в каждом из беспроводных устройств сбора сейсмических данных. Этот приемник GNSS используется главным образом во время синхронизации, но в то же время дает либо непосредственно измеренные позиции (позиции по сигналам системы GNSS) развернутых беспроводных устройств сбора сейсмических данных, либо информацию о позициях, которая может быть использована назначающим устройством для получения (с использованием пост-обработки согласно принципам дифференциальной системы GNSS) измеренных позиций (позиций по сигналам GNSS) развернутых беспроводных устройств сбора сейсмических данных. Эти две альтернативы подробно рассмотрены ниже. В обоих случаях идея состоит в том, чтобы использовать измеренные позиции для поиска топографических пунктов, которым были назначены беспроводные устройства сбора сейсмических данных.
При таком подходе нет необходимости во внешнем устройстве и оператору не нужно идти вдоль линий сетки. Мы повышаем эффективность фазы назначения (по сравнению с известным третьим этапом описанного выше трехступенчатого способа) путем автоматизации ассоциирования между беспроводными устройствами сбора сейсмических данных и топографическими пунктами, где находятся эти устройства в поле. Таким образом, мы экономим затраты на приобретение внешнего устройства и время, которое пришлось бы потратить на ассоциирование беспроводных устройств сбора сейсмических данных с топографическими пунктами вручную в поле. Другими словами, не требуется никакого человеческого вмешательства в поле для ассоциирования устройств с географическими пунктами, где они находятся, что также экономит время, предотвращает ошибки и позволяет избежать воздействия неблагоприятных факторов в поле.
Согласно одному из конкретных признаков этап вычисления ассоциаций осуществляется с использованием следующего первого правила: каждый конкретный топографический пункт ассоциируют с ближайшим к нему беспроводным устройством сбора сейсмических данных, при условии, что расстояние между этим конкретным топографическим пунктом и указанным ближайшим к нему беспроводным устройством сбора сейсмических данных меньше расстояния ассоциирования.
Это первое правило очень легко реализовать. Определение позиций на основе сигналов GNSS для беспроводных устройств сбора сейсмических данных достаточно производить со стандартной точностью, поскольку ассоциирование осуществляется в пределах расстояния ассоциирования (т.е. диапазона ассоциирования), который может превосходить диапазон погрешности определения по сигналам.
Согласно одному из конкретных признаков этап вычисления ассоциаций выполняется с использованием следующего второго правила: если согласно первому правилу рассматриваемое конкретное беспроводное устройство сбора сейсмических данных может быть ассоциировано с несколькими топографическими пунктами, это беспроводное устройство сбора сейсмических данных ассоциируют с ближайшим к нему топографическим пунктом.
Это второе правило обеспечивает, что каждое беспроводное устройство сбора сейсмических данных ассоциируется только с одним топографическим пунктом.
Согласно одному из конкретных признаков способ содержит следующий этап, выполняемый назначающим устройством: графическое представление оператору через человеко-машинный интерфейс назначающего устройства, ассоциаций, получаемых на этапе вычисления ассоциаций.
Таким образом, оператору очень легко пользоваться назначающим устройством.
Согласно одному из конкретных признаков способ содержит следующий этап, выполняемый назначающим устройством: это устройство позволяет оператору, через человеко-машинный интерфейс, проверить или исправить графически представленные ассоциации.
Таким образом, оператор может легко проверить или исправить ассоциации, автоматически устанавливаемые назначающим устройством.
Согласно одному из конкретных признаков способ содержит следующий этап, выполняемый назначающим устройством:
- проверка ассоциаций, полученных на этапе вычисления ассоциаций; и
- если на этапе проверки обнаружена по меньшей мере одна ошибка, передача сигнала оповещения через человеко-машинный интерфейс назначающего устройства и/или осуществление коррекции.
Таким образом, после того, как было выполнено назначение, можно проверить его и подать сигнал оповещения и/или осуществить некоторую коррекцию. Такие дополнительные этапы можно осуществить применительно к текущему назначению или к назначению, которое было выполнено в прошлом (например, посредством повторной загрузки прошлых событий в базу данных назначающего устройства). Другими словами, мы может восстановить прошлое назначение и внести изменения в прошедшие события.
Согласно первой проверке, этап проверки содержит проверку, является ли измеренная позиция одного из беспроводных устройств сбора сейсмических данных ошибочной.
Согласно второй проверке, этап проверки содержит проверку, назначены ли больше одного беспроводного устройства сбора сейсмических данных одному и тому же топографическому пункту.
Согласно третьей проверке, этап проверки содержит проверку, удалено ли одно из беспроводных устройств сбора сейсмических данных от ассоциированного с ним топографического пункта на расстояние, превышающее заданный порог.
Согласно четвертой проверке, этап проверки содержит проверку, нет ли, для сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, несоответствия измеренных позиций этих беспроводных устройств сбора сейсмических данных указанному заданному порядку.
Согласно пятой проверке, этап проверки содержит проверку, нет ли, для двух соседних беспроводных устройств сбора сейсмических данных из состава сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, несоответствия измеренных позиций этих двух беспроводных устройств сбора сейсмических данных ассоциированным с ними топографическим пунктам.
Согласно одному из конкретных признаков указанное назначающее устройство представляет собой центральную станцию сейсмической системы или персональный компьютер мобильного сборщика.
Согласно первому конкретному варианту реализации этап получения измеренных позиций содержит: получение данных об измеренных позициях от беспроводных устройств сбора сейсмических данных, эти данные об измеренных позициях вычисляют приемники сигналов спутниковой навигационной системы в составе беспроводных устройств сбора сейсмических данных.
Согласно второму конкретному варианту реализации этап получения измеренных позиций содержит:
- получение от беспроводных устройств сбора сейсмических данных первых исходных данных о позициях, соответствующих информации о позициях, генерируемой приемниками сигналов спутниковой навигационной системы, когда эти беспроводные устройства сбора сейсмических данных установлены на земле, каждое возле одного из топографических пунктов;
- получение по меньшей мере от одной опорной станции вторых исходных данных о позициях, соответствующих информации о позиции, генерируемой приемником сигналов спутниковой навигационной системы из состава указанной по меньшей мере одной опорной станции;
- вычисление измеренных позиций в функции первых исходных данных о позициях и вторых исходных данных о позициях.
В другом варианте настоящее изобретение относится к компьютерному программному продукту, содержащему команды программного кода для реализации описанного выше способа (в любом из его различных вариантов) при выполнении программы компьютером или процессором.
В другом варианте настоящее изобретение относится к энергонезависимому компьютерному носителю записи, сохраняющему программу, при выполнении которой компьютером или процессором этот компьютер или процессор осуществляет описанный выше способ (в любом из его различных вариантов).
В другом варианте описанный настоящее изобретение предлагает назначающее устройство для автоматического назначения беспроводных устройств сбора сейсмических данных топографическим пунктам, каждое беспроводное устройство сбора сейсмических данных содержит приемник сигналов спутниковой навигационной системы. Указанное назначающее устройство содержит:
- средства для получения топографических пунктов, в которых ожидается размещение беспроводных устройств сбора сейсмических данных;
- средства для получения измеренных позиций беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, генерируемой приемниками сигналов спутниковой навигационной системы, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических пунктов; и
- средства для вычисления ассоциаций между каждым из беспроводных устройств сбора сейсмических данных и одним из топографических пунктов в функции сравнения измеренных позиций с позициями топографических пунктов.
Предпочтительно назначающее устройство содержит средства для осуществления этапов способа назначения, описанного выше, в любом из его различных вариантов.
Подробное описание чертежей
Другие признаки и преимущества вариантов настоящего изобретения станут ясны из последующего описания, данного на характерных и неисчерпывающих примерах, и из прилагаемых чертежей, на которых:
фиг. 1, уже описанный со ссылками на известные способы и системы, иллюстрирует пример топографических пунктов на земле, размещенных в виде сетки, образованной линиями (первый этап известного трехступенчатого способа);
фиг. 2, уже описанный со ссылками на известные способы и системы, иллюстрирует пример беспроводных устройств сбора сейсмических данных, развернутых возле маркированных топографических пунктов вдоль линий сетки (второй этап известного трехступенчатого способа);
фиг. 3, уже описанный со ссылками на известные способы и системы, иллюстрирует ручное назначение, выполняемое оператором, использующим свое внешнее устройство, когда оператор идет вдоль линии (третий этап известного трехступенчатого способа);
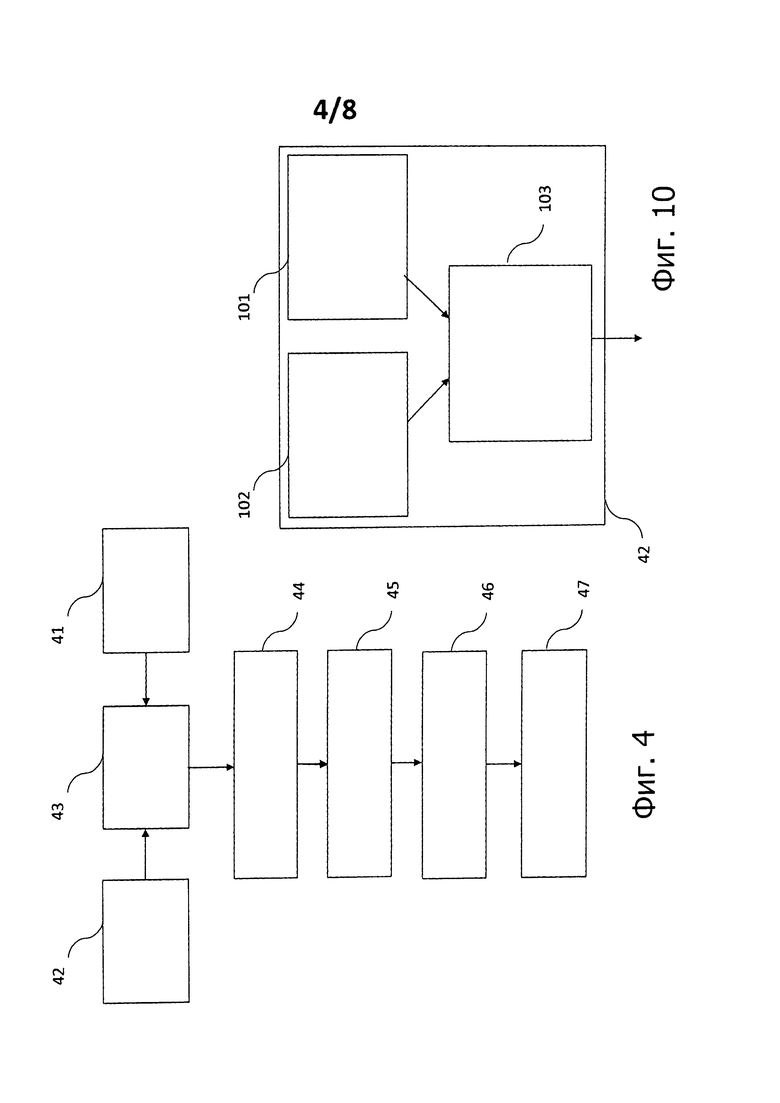
фиг. 4 представляет логическую схему конкретного варианта способа согласно настоящему изобретению;
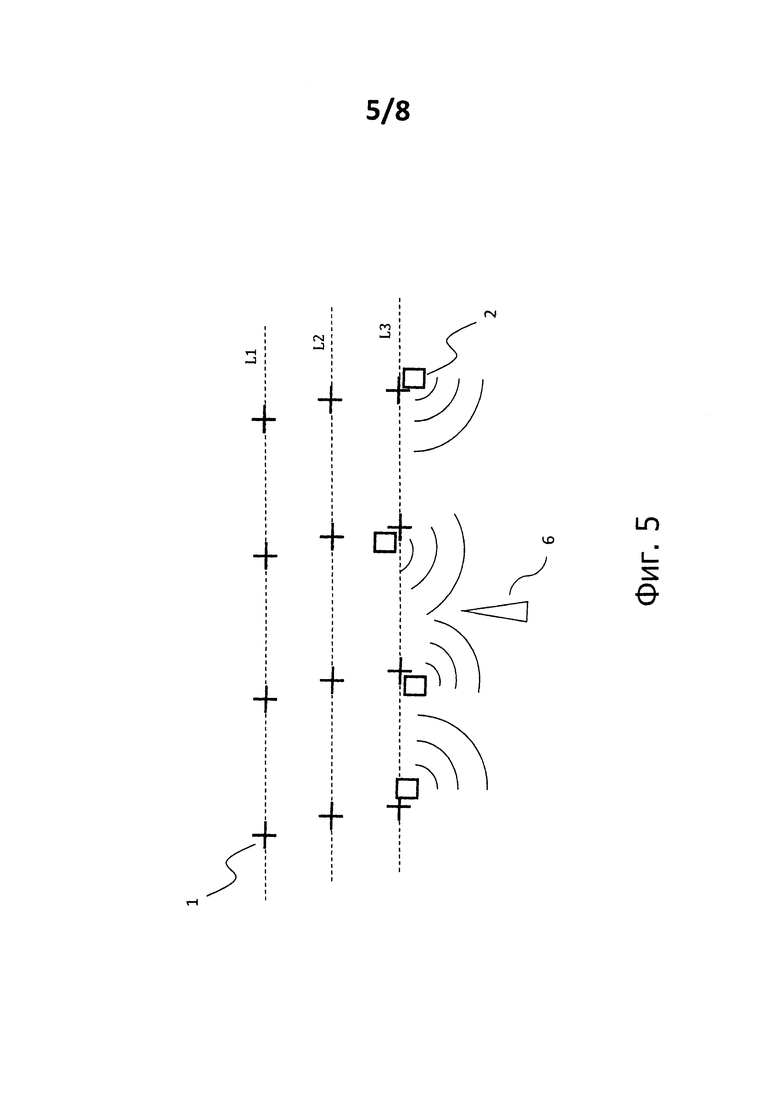
фиг. 5 представляет схематичную иллюстрацию конкретного варианта этапа 42, показанного на фиг. 4 (получение измеренных позиций беспроводных устройств сбора сейсмических данных);
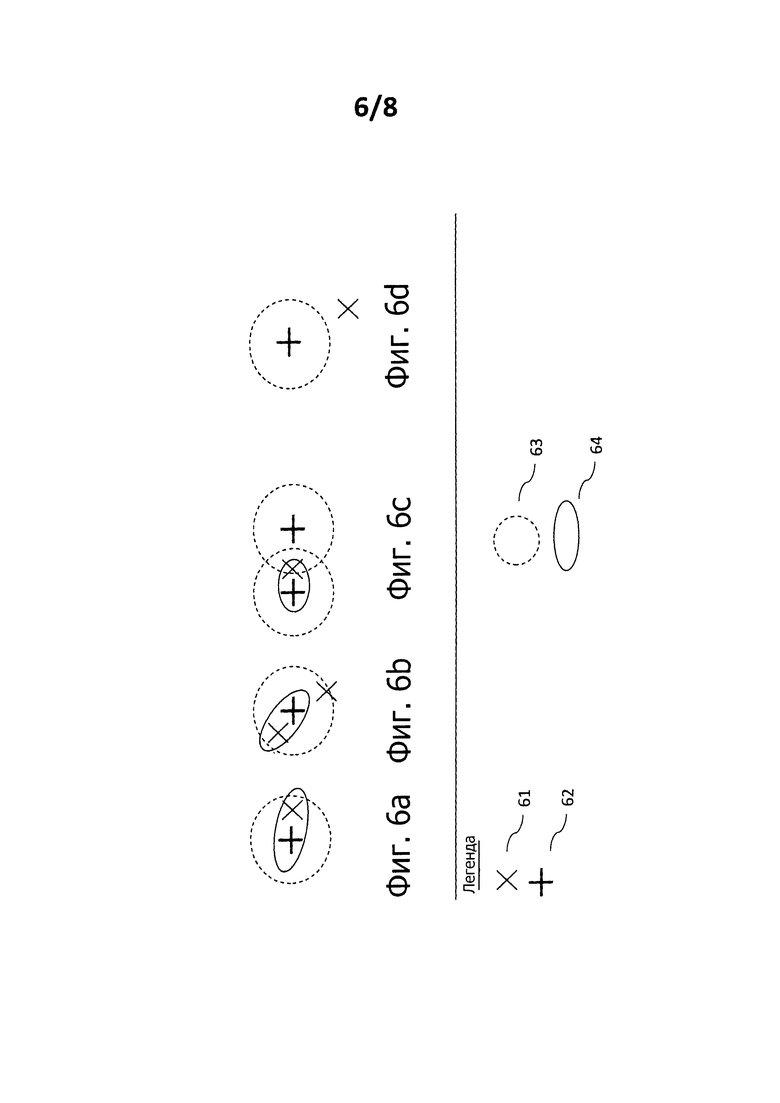
фиг. 6а-6d иллюстрирует правила ассоциирования, используемые в конкретном варианте этапа 43, показанного на фиг. 4 (вычисление ассоциаций между беспроводными устройствами сбора сейсмических данных и топографическими пунктами);
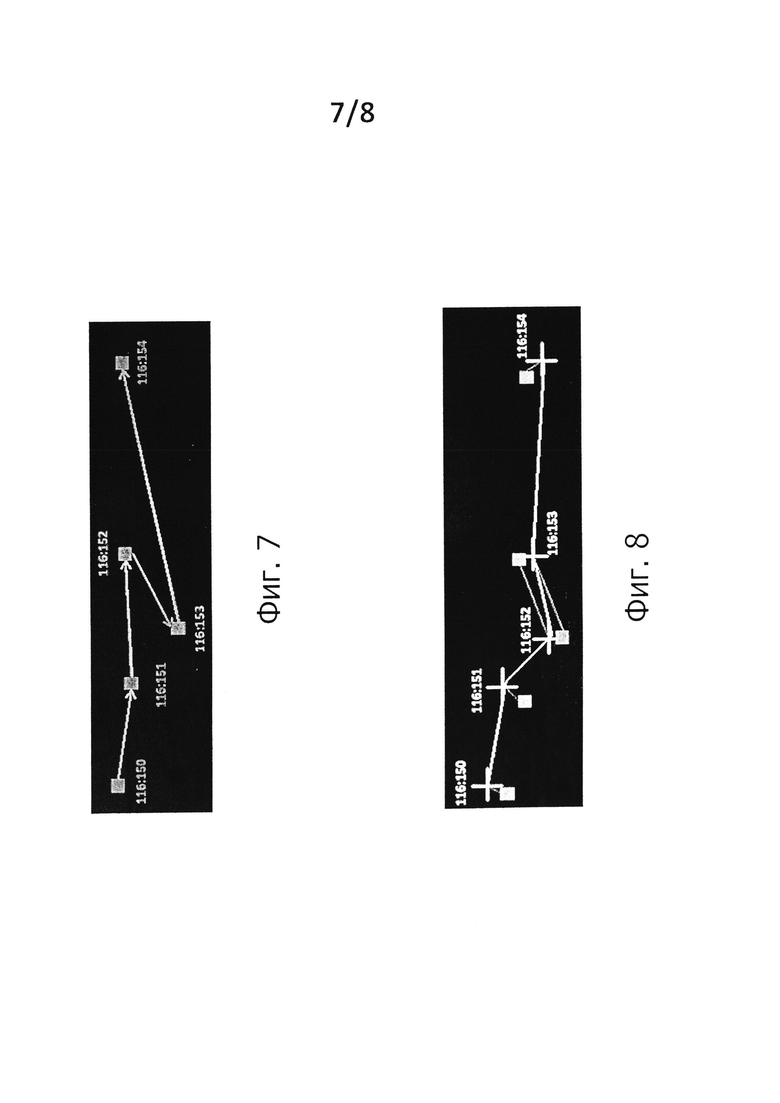
фиг. 7 иллюстрирует первый пример ошибки на этапе 46, показанном на фиг. 4 (проверка вычисленных ассоциаций);
фиг. 8 иллюстрирует второй пример ошибки на этапе 46, показанном на фиг. 4 (проверка вычисленных ассоциаций);
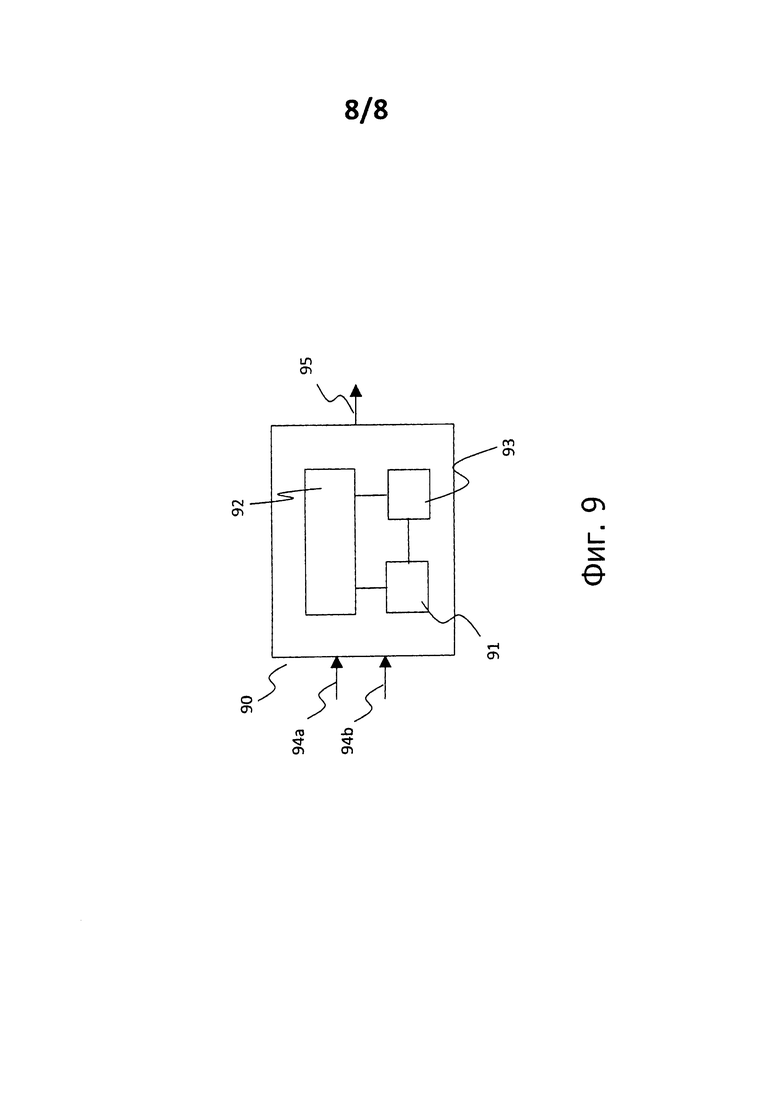
фиг. 9 показывает упрощенную структуру назначающего устройства согласно одному из конкретных вариантов настоящего изобретения; и
фиг. 10 представляет один из конкретных вариантов этапа 42 показанного на фиг. 4 (получение измеренных позиций).
Подробное описание изобретения
На всех чертежах настоящего документа идентичным элементам и этапам присвоены одинаковые цифровые позиционные обозначения.
Логическая схема, показанная на фиг. 4, представляет один из конкретных вариантов способа согласно настоящему изобретению. При выполнении назначающим устройством (см. фиг. 9, описываемый ниже) этот способ обеспечивает автоматическое назначение беспроводных устройств сбора сейсмических данных топографическим пунктам.
На этапе 41 назначающее устройство получает топографические пункты, в которых ожидается размещение беспроводных устройств сбора сейсмических данных.
Как уже подробно описано выше (см. фиг. 1 и первый этап известного трехступенчатого способа), местонахождение топографических пунктов определяют геологи прежде, чем приступить к развертыванию беспроводных устройств сбора сейсмических данных. Эти топографические пункты прецизионно расположены в поле (прецизионные координаты по сигналам системы GNSS) и их расположение записано в специальном файле (файл SPS). В реальных условиях в поле могут располагаться тысячи топографических пунктов. На земли эти пункты обозначены (изыскателями) с использованием маркеров (вешек, флажков, пятен краски на земле и т.п.).
На этапе 42 назначающее устройство получает измеренные позиции (позиции на основе сигналов GNSS) беспроводных устройств сбора сейсмических данных. Идея состоит в использовании приемника GNSS уже встроенного в беспроводное устройство сбора сейсмических данных и используемого главным образом во время синхронизации. Другими словами, данные измеренных позиций представляют приемники GNSS, встроенные в беспроводные устройства сбора сейсмических данных, когда эти беспроводные устройства сбора сейсмических данных установлены на земле, каждое возле одного из топографических пунктов. Каждое беспроводное устройство сбора сейсмических данных содержит приемник GNSS. Под приемниками GNSS здесь понимают приемники, совместимые с любой из существующих или будущих спутниковых навигационных систем (GPS, GALILEO, GLONASS, COMPASS, IRNSS, …).
Другими словами, когда беспроводные устройства сбора сейсмических данных уже развернуты на земле (т.е. после второго этапа известного трехступенчатого способа, см. фиг. 2), их приемники GNSS вычисляют позиции по сигналам GNSS. Затем эти данные позиций по сигналам GNSS вызывают, например, вместе с информацией QC (контроль качества (Quality Control)) и SOH (исправность (State of Health), например, запас энергии в аккумуляторах каждого беспроводного устройства сбора сейсмических данных) во время фазы вызова информации QC/SOH. Как показано на фиг. 5, это обычно делает радиоприемник 6, который может быть стационарным или мобильным (переносимым оператором или перевозимым на автомобиле) и который принимает информацию о позициях по сигналам GNSS, передаваемую посредством радиопередатчика встроенного в каждое беспроводное устройство 2 сбора сейсмических данных.
Фиг. 10 показывает альтернативный вариант выполнения этапа 42. Здесь измеренные позиции (позиции по сигналам GNSS) не вычисляются непосредственно приемниками GNSS, вследствие чего эта информация не предоставляется беспроводными устройствами сбора сейсмических данных. Вместо этого назначающее устройство выполняет следующие этапы:
- этап 101: получение, от беспроводных устройств сбора сейсмических данных, первых исходных данных о позициях, соответствующих информации о позициях, предоставляемой приемниками GNSS, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических пунктов;
- этап 102: получение по меньшей мере от одной опорной станции GNSS вторых исходных данных о позициях, соответствующих информации о позиции, генерируемой приемником GNSS из состава указанной по меньшей мере одной опорной станции GNSS;
- этап 103: вычисление измеренных позиций в функции первых исходных данных о позициях и вторых исходных данных о позициях, с использованием алгоритма дифференциальной пост-обработки данных GNSS.
В этом альтернативном варианте опорная станция GNSS представляет собой неподвижный приемник GNSS, точное местонахождение которого известно. Эта опорная станция GNSS может представлять собой специализированный головной приемник GNSS RTK (система «кинематика в реальном времени» ("Real Time Kinematic")) или приемник GNSS из состава одно из беспроводных устройств сбора сейсмических данных в предположении, что позиция этого устройства точно известна. Расстояние между опорной станцией и всеми беспроводными устройствами сбора сейсмических данных не должно превышать заданной величины (например, 20 км) для достижения наилучших характеристик.
Этот альтернативный вариант работает, например, следующим образом: перед или во время регистрации сейсмических данных происходит активизации приемников GNSS во всех беспроводных устройствах сбора сейсмических данных и на опорной станции (или нескольких опорных станциях). В одно и то же время эти приемник GNSS опорной станции и приемники GNSS беспроводных устройств сбора сейсмических данных отслеживают спутники из соответствующей группировки. Исходные данные GNSS от всех упомянутых выше приемников GNSS (т.е. приемников из состава беспроводных устройств сбора сейсмических данных и опорной станции) регистрируют. Обычно исходные данные GNSS генерируют с периодичностью 1 с, однако могут быть конфигурированы и другие частоты получения этих данных. Для каждого спутника системы GNSS такие исходные данные содержат результаты измерений кода псевдодальности, результаты измерений фазы несущей, результаты измерений доплеровского сдвига частоты, а также навигационные сообщения, передаваемые спутником в режиме широкого вещания. После того, как исходные данные GNSS будут зарегистрированы в достаточном объеме (обычно - 15 минут), регистрация данных останавливается. Затем вызывают исходные данные GNSS от беспроводных устройств сбора сейсмических данных и от опорной станции. Исходные данные GNSS могут иметь специально разработанный формат или стандартный формат, например, RINEX/BINEX. В назначающем устройстве (например, на центральной станции) используют алгоритм дифференциальной пост-обработки GNSS (программная и/или аппаратная реализация) для вычисления измеренных позиций всех беспроводных устройств сбора сейсмических данных в функции от исходных данных GNSS от опорной станции (или нескольких опорных станций) и исходных данных GNSS от каждого беспроводного устройства сбора сейсмических данных.
Хорошо известно программное обеспечение для дифференциальной постобработки данных GNSS, например, пакет "RTKLIB", представляющий собой пакет программы с открытым исходным кодом для позиционирования (местоопределения) по сигналам GNSS (Open Source Program Package for GNSS Positioning (http://www.rtklib.com)). Пакет RTKLIB содержит портативную библиотеку программы и несколько прикладных программ (АР (application program)), использующих эту библиотеку. Он поддерживает разнообразные режимы местоопределения с использованием системы GNSS, как для работы в реальном времени, так и для случая пост-обработки.
Общий принцип дифференциального местоопределения по сигналам системы GNSS (в реальном времени или в случае пост-обработки) основан на том факте, что погрешность местоопределения является одинаковой и на опорной станции GNSS, и в подвижном приемнике GNSS (приемник GNSS, движущийся по территории сейсморазведки), если расстояние между этими двумя приемниками не превышает заданной величины (например, от 10 км до 40 км). Точность зависит от окружающей среды, времени регистрации исходных данных и расстояния до опорной станции. Если знать точную позицию опорной станции, алгоритмы дифференциального местоопределения GNSS позволяют вычислить точную позицию подвижного приемника GNSS. Для достижения точности на уровне нескольких сантиметров опорная станция GNSS и подвижный приемник GNSS должны быть способны одновременно выполнять наблюдения кода и фазы несущей, обычно именуемых исходными данными. Результаты этих наблюдений регистрируют на опорной станции GNSS и в подвижном приемнике GNSS, чтобы обработать позднее. Пост-обработка позволяет зафиксировать неоднозначность результатов измерений фазы несущей для каждого спутника и определить местонахождение подвижного приемника GNSS относительно опорной станции GNSS с высокой точностью.
На этапе 43 назначающее устройство вычисляет ассоциации между каждым из беспроводных устройств 2 сбора сейсмических данных и соответствующим ему одним из топографических пунктов 1 в функции сравнения между измеренными позициями (позициями по сигналам GNSS) и позицией рассматриваемого топографического пункта.
Фиг. 6а-6d иллюстрируют два правила ассоциирования, используемых в одном из конкретных вариантов на этом этапе 43:
- первое правило: некий конкретный топографический пункт ассоциируют с ближайшим к нему беспроводным устройством сбора сейсмических данных, в предположении, что расстояние между рассматриваемым топографическим пунктом и ближайшим к нему беспроводным устройством сбора сейсмических данных меньше расстояния ассоциирования;
- второе правило: если согласно первому правилу некое конкретное беспроводное устройство сбора сейсмических данных может быть ассоциировано с несколькими топографическими пунктами, это беспроводное устройство сбора сейсмических данных ассоциируют с ближайшим к нему топографическим пунктом.
В легенде: крестик поз. 61 представляет измеренную позицию (позицию по сигналам GNSS) беспроводного устройства сбора сейсмических данных; крестик поз. 62 представляет топографический пункт; кружок поз. 63 представляет область ассоциирования, радиус этого кружка обозначает расстояние ассоциирования; эллипс поз. 64 представляет вычисленную ассоциацию между беспроводным устройством сбора сейсмических данных и топографическим пунктом.
Фиг. 6а иллюстрирует случай одного беспроводного устройства сбора сейсмических данных, расположенного в области ассоциирования вокруг топографического пункта. Согласно первому правилу генерируют вычисленную ассоциацию между этим беспроводным устройством сбора сейсмических данных и этим топографическим пунктом.
Фиг. 6b иллюстрирует случай, когда два беспроводных устройства сбора сейсмических данных расположены в области ассоциирования вокруг топографического пункта. Согласно первому правилу генерируют вычисленную ассоциацию между одним из этих беспроводных устройств сбора сейсмических данных (ближайшим к топографическому пункту) и этим топографическим пунктом.
Фиг. 6с иллюстрирует случай, когда беспроводное устройство сбора сейсмических данных расположено в двух областях ассоциирования (каждая область относится к своему, отличному от другого топографическому пункту). Согласно второму правилу генерируют вычисленную ассоциацию между этим беспроводным устройством сбора сейсмических данных и одним из указанных топографических пунктов (ближайшим к рассматриваемому беспроводному устройству сбора сейсмических данных).
Фиг. 6d иллюстрирует случай одного беспроводного устройства сбора сейсмических данных, расположенного вне области ассоциирования какого-либо топографического пункта. Согласно первому правилу в этом случае не генерируют никакой вычисленной ассоциации.
На этапе 44 назначающее устройство графически представляет оператору посредством его человеко-машинного интерфейса (например, на экране) ассоциации, полученные на этапе 43 вычисления ассоциаций.
На этапе 45 назначающее устройство позволяет оператору посредством его человеко-машинного интерфейса (например, с помощью экрана и мыши или сенсорного экрана) подтвердить или скорректировать графически представленные ассоциации.
На этапе 46 назначающее устройство проверяет вычисленные ассоциации (полученные на этапе 43). Конкретные варианты этапа 46 подробно описаны ниже со ссылками на фиг. 7 и 8.
На этапе 47, если на этапе 46 проверки обнаружена хотя бы одна ошибка, назначающее устройство подает сигнал оповещения посредством своего человеко-машинного интерфейса и/или выполняет корректирующую операцию. Например, происходит автоматическое обнаружение и выделение ошибочных позиций по сигналам GNSS, так что оператор (наблюдатель) может принять соответствующее корректирующее решение (например, вручную ассоциировать рассматриваемое беспроводное устройство сбора сейсмических данных с топографическим пунктом или передать кому-нибудь, находящемуся в поле, команду ассоциировать это беспроводное устройство сбора сейсмических данных с топографическим пунктом).
Таким образом, после того, как назначение было сделано, его можно проверить и подать сигнал оповещения и/или внести некоторые коррективы. Необходимо отметить, что этапы 46 и 47 можно выполнять сразу же после этапов 41-45 или позднее. Иными словами, этапы 46 и 47 можно выполнить применительно к назначениям (полученным на этапах 41-45), которые были сделаны в прошлом (например, посредством загрузки прошлых событий в базу данных назначающего устройства). Это позволяет восстановить прошлые назначения и внести изменения в прошедшие события.
В альтернативном варианте этапы 46 и 47 выполнят применительно к назначениям, произведенным с использованием какого-либо известного способа (например, известного трехступенчатого способа, описанного выше со ссылками на фиг. 1-3).
Рассмотрим подробнее конкретные варианты этапа 46 проверки, показанного на фиг. 4 (также именуемого «геометрическая проверка»).
Примеры проверки без использования топографических пунктов (т.е. без использования файла SPS)
1) Проверка, находится ли беспроводное устройство сбора сейсмических данных далеко от плановой позиции
Назначающее устройство проверяет, является ли измеренная позиция (позиция по сигналам GNSS) одного из беспроводных устройств сбора сейсмических данных ошибочной позицией. Это может указывать на недостоверность найденной позиции по сигналу GNSS.
Выполняется следующий алгоритм:
- для каждого беспроводного устройства сбора сейсмических данных проецируют его позицию по сигналам GNSS, т.е. широту и долготу, в плоскую систему координат (с применением одной и той же проецирующей модели для всех беспроводных устройств сбора сейсмических данных). Результатом является пара координат в плоскости x и y;
- вычисляют среднюю величину x (Ex, ожидаемая величина х) и среднюю величину у (Ey, ожидаемая величина y) по всем координатам х, y всех беспроводных устройств сбора сейсмических данных;
- вычисляют величину sigmax, среднее значение отклонений от величины Ex, и sigmay, среднее значение отклонений от величины Ey, по всем координатам x, y всех беспроводных устройств сбора сейсмических данных;
- для каждого беспроводного устройства сбора сейсмических данных:
- проверяют, выполняется ли следующее первое условие: координата x находится между величинами Εx-3sigmax и Εx+3sigmax;
- проверяют, выполняется ли следующее второе условие: координата у находится между величинами Ey-3sigmay and Ey+3sigmay;
- если хотя бы одно из этих первого и второго условий не выполняется, сообщают, что рассматриваемое беспроводное устройство сбора сейсмических данных находится «далеко от плановой позиции».
Целью этой проверки является поиск ошибочных позиций на основе относительного расположения беспроводных устройств сбора сейсмических данных и правило трех сигм (обычно применимого в случае гауссового (нормального) распределения). Хотя в случае сейсморазведки нормальное распределение не применимо, полевые испытания показали, что правило трех сигм позволяет отбросить приемлемое количество ошибочных пунктов.
2) Проверка, нет ли случаев, когда одной и той же вешке назначены больше 1 узла
Назначающее устройство проверяет, нет ли случаев, когда одному и тому же топографическому пункту назначены больше одного беспроводного устройства сбора сейсмических данных.
3) Проверка отсутствия нарушений порядка расположения устройств
Назначающее устройство проверяет, нет ли в сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, ситуации, когда измеренные позиции этих беспроводных устройств сбора сейсмических данных не согласуются с указанным заданным порядком.
Другими словами, этот сигнал оповещения подают, если позиции по сигналам GNSS для беспроводных устройств сбора сейсмических данных в одной и той же линии не изменяются прогрессивно в одном и том же направлении, как в примере, показанном на фиг. 7. В этом примере "116:153" - это идентификатор вешки, отмечающей топографический пункт. Этот идентификатор означает, что ассоциированное с ним беспроводное устройство сбора сейсмических данных помещено на линию "116" в позицию "153". Как можно видеть на фиг. 7, позиция беспроводного устройства сбора сейсмических данных, назначенного вешке "116:153", не продвинута в ожидаемом порядке линии (эта позиция смещена «назад» относительно других).
Эта проблема может указывать на плохую позицию беспроводного устройства сбора сейсмических данных или на то, что это беспроводное устройство сбора сейсмических данных назначено не той вешке на линии.
Следующие математические проверки выполняют для каждого беспроводного устройства сбора сейсмических данных, назначенного одной и той же линии, в порядке увеличения номеров вешек (в предположении, что Устройство 1 (Unit1) представляет собой некое беспроводное устройство сбора сейсмических данных, Устройство 2 (Unit2) - следующее устройство в порядке увеличения номеров вешек, Устройство 3 (Unit3) - следующее устройство):
- вычисляют U, вектор, соединяющий измеренные позиции (позиции по сигналам GNSS) Устройства 1 и Устройства 2 (от Устройства 1 к Устройству 2),
- вычисляют V, вектор, соединяющий измеренные позиции (позиции по сигналам GNSS) Устройства 2 и Устройства 3 (от Устройства 2 к Устройству 3), и
- сообщают, что Устройство 3 находится в неправильном месте («Неправильный порядок в линии»), если скалярное произведение векторов U.V отрицательно.
Примеры проверок с использованием топографических пунктов (т.е. с использованием файла SPS)
1')_Проверка, находится ли узел далеко от плановой позиции
Такая же, как проверка 1) выше.
2') Проверка, нет ли случаев, когда одной и той же вешке назначены больше 1 узла
Такая же, как проверка 2) выше.
3') Проверка, находится ли узел далеко от ассоциированной с ним вешки
Назначающее устройство проверяет, находится ли одно из беспроводных устройств сбора сейсмических данных на превышающем заданный порог расстоянии от ассоциированного с ним топографического пункта.
4') Проверка отсутствия нарушений порядка расположения устройств (усиленная версия по сравнению с проверкой 3) выше)
Назначающее устройство проверяет, для двух беспроводных устройств сбора сейсмических данных в сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, не имеет ли место ситуация, когда измеренные позиции этих двух беспроводных устройств сбора сейсмических данных не согласуются с ассоциированными с ними топографическими пунктами.
Другими словами, позиции по сигналам GNSS не согласуются с вешками (отмечающими топографические пункты) в линиях. Эта проблема может служить индикатором того, что какое-либо беспроводное устройство сбора сейсмических данных назначено неправильной вешке (т.е. неправильному топографическому пункту) или что маркировка беспроводных устройств сбора сейсмических данных выполнена в обратном порядке номеров линий.
В примере, показанном на фиг. 8, беспроводные устройства сбора сейсмических данных, назначенные вешкам 116:152 и 116:153. были «переставлены» (направление вектора между вешками этих устройств инвертировано относительно направления между самими этими двумя беспроводными устройствами сбора сейсмических данных).
Следующие математические проверки выполняют для каждой вешки, которой назначено какое-либо беспроводное устройство сбора сейсмических данных назначенного в линии, в порядке увеличения номеров:
- Стойка 1 (Rec1) - это вешка, Стойка 2 (Rec2) - это следующая вешка в порядке увеличения номеров,
- Устройство 1 (Unit1) - это беспроводное устройство сбора сейсмических данных, назначенное вешке Стойка 1 (Rec1), Устройство 2 (Unit2) - это беспроводное устройство сбора сейсмических данных, назначенное вешке Стойка 2 (Rec2),
- вычисляют U, вектор, соединяющий топографические пункты вешек Стойка 1 и Стойка 2 (от Стойки 1 к Стойке 2),
- вычисляют V, вектор, соединяющий измеренные позиции (позиции по сигналам GNSS) Устройства 1 и Устройства 2 (от Устройства 1 к Устройству 2), и
- сообщают, что Устройство 1 и Устройство 2 находятся в «Неправильном порядке в линии», если скалярное произведение векторов U.V отрицательно.
На фиг. 9 показана упрощенная структура назначающего устройства 90 согласно одному из конкретных вариантов настоящего изобретения. Это назначающее устройство представляет собой, например, центральную станцию сейсмической системы или персональный компьютер мобильного сборщика.
Назначающее устройство 90 содержит энергонезависимую память 91 (например, постоянное запоминающее устройство (ПЗУ (ROM)) или жесткий диск), энергозависимую память 93 (например, запоминающее устройство с произвольной выборкой (ЗУПВ (RAM))) и процессор 92. Энергонезависимая память 91 представляет собой энергонезависимый компьютерный носитель записи. Он сохраняет команды исполняемого программного кода, которые выполняет процессор 92 для осуществления описанного выше способа (способа автоматического назначения беспроводных устройств сбора сейсмических данных топографическим пунктам), в связи с фиг. 4-8.
Назначающее устройство 90 принимает (получает) топографические пункты 94а (см. этап 41 на фиг. 4) и измеренные позиции (позиции по сигналам GNSS) 94b беспроводных устройств сбора сейсмических данных (см. этап 42 на фиг. 4). Оно генерирует ассоциации 95 между каждым из беспроводных устройств сбора сейсмических данных и одним из топографических пунктов.
После инициализации указанные выше команды программного кода передают из энергонезависимой памяти 91 в энергозависимую память 93 для выполнения процессором 92. Энергозависимая память 93 аналогично содержит регистры для сохранения переменных и параметров, необходимых для выполнения.
Все этапы описанного выше способа назначения могут быть выполнены одинаково хорошо:
- путем выполнения набора команд программного кода посредством перепрограммируемого компьютерного устройства, такого как устройство типа персонального компьютера, DSP (цифровой процессор сигнала) или микроконтроллер. Эти команды программного кода могут храниться на энергонезависимом компьютерном носителе записи, съемном (например, дискета, CD-ROM или DVD-ROM) или несъемном; или
- посредством специализированного устройства или компонента, такого как FPGA (программируемая пользователем вентильная матрица (Field Programmable Gate Array)), ASIC (специализированная интегральная схема (Application-Specific Integrated Circuit)) или какого-либо специализированного аппаратного компонента.
Другими словами, настоящее изобретение не ограничивается чисто программной реализацией в форме команд компьютерной программы, а может быть также реализовано в аппаратной форме или в виде сочетания аппаратной части и программной части.
По меньшей мере один пример варианта настоящего изобретения предлагает способ назначения беспроводных устройств сбора сейсмических данных топографическим пунктам, этот способ упрощает «этап назначения» (по сравнению с этапом с) известного трехступенчатого способа описанного выше).
По меньшей мере один из вариантов настоящего изобретения предлагает подобный способ, не требующий вмешательства человека в поле (ни тем более внешнего устройства) и тем самым сберегающий время, предотвращающий ошибки и позволяющий избегать рисков работы в поле.
По меньшей мере один из вариантов настоящего изобретения предлагает подобный способ, позволяющий снизить затраты и/или уменьшить время, необходимое для развертывания беспроводных устройств сбора сейсмических данных.
Хотя настоящее изобретение было описано со ссылками на один или несколько примеров, специалисты в рассматриваемой области должны понимать, что в форму и детали этих примеров могут быть внесены изменения, не отклоняясь от объема настоящего изобретения и/или прилагаемой Формулы изобретения.
Изобретение относится к сбору сейсмических данных. Технический результат – повышение эффективности назначения беспроводных устройств сбора сейсмических данных топографическим местоположениям. Способ автоматического назначения беспроводных устройств сбора сейсмических данных топографическим местоположениям включает этапы, на которых получают топографические местоположения, в которых ожидается размещение соответствующего одного из беспроводных устройств сбора сейсмических данных, получают измеренные позиции беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, предоставляемой приемниками сигналов спутниковой навигационной системы, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических местоположений, и вычисляют ассоциации, каждая ассоциация между одним из беспроводных устройств сбора сейсмических данных и соответствующим одним из топографических местоположений, в функции сравнения измеренных позиций с позициями топографических местоположений. 3 н. и 13 з.п. ф-лы, 13 ил.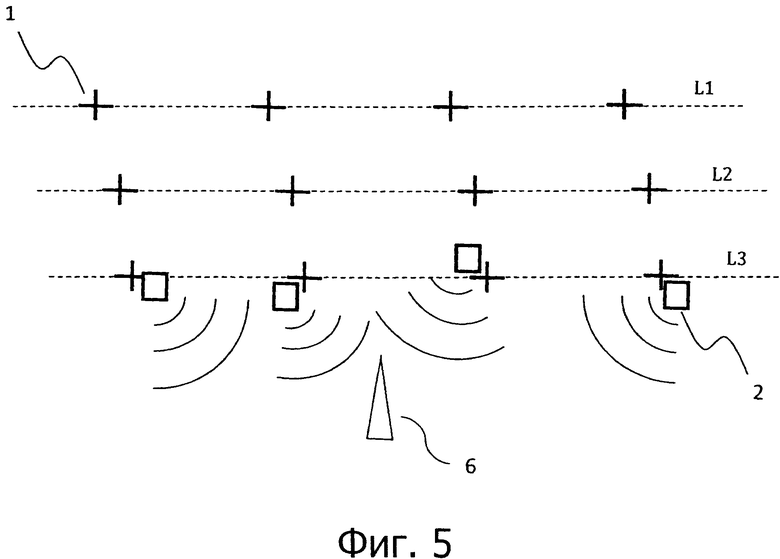
1. Способ автоматического назначения беспроводных устройств сбора сейсмических данных топографическим местоположениям, где каждое беспроводное устройство сбора сейсмических данных содержит приемник сигналов спутниковой навигационной системы, при этом способ содержит следующие этапы, выполняемые назначающим устройством:
- получение топографических местоположений, в которых ожидается размещение соответствующего одного из беспроводных устройств сбора сейсмических данных, при этом топографические местоположения определены прежде, чем начнется развертывание беспроводных устройств сбора сейсмических данных в соответствующих топографических местоположениях и сохранены в файл топографического местоположения на по меньшей мере одном энергонезависимом компьютерном носителе записи;
- получение измеренных позиций беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, предоставляемой приемниками сигналов спутниковой навигационной системы, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических местоположений; и
- вычисление ассоциаций, каждая ассоциация между одним из беспроводных устройств сбора сейсмических данных и соответствующим одним из топографических местоположений, в функции сравнения измеренных позиций с позициями топографических местоположений.
2. Способ по п. 1, отличающийся тем, что этап вычисления ассоциаций выполняется с использованием следующего первого правила: некое конкретное топографическое местоположение ассоциируют с ближайшим к нему беспроводным устройством сбора сейсмических данных при условии, что расстояние между рассматриваемым топографическим местоположением и указанным ближайшим к нему беспроводным устройством сбора сейсмических данных меньше расстояния ассоциирования.
3. Способ по п. 2, отличающийся тем, что этап вычисления ассоциаций выполняется с использованием следующего второго правила: если согласно первому правилу некое конкретное беспроводное устройство сбора сейсмических данных может быть ассоциировано с несколькими топографическими местоположениями, это беспроводное устройство сбора сейсмических данных ассоциируют с ближайшим к нему топографическим местоположением.
4. Способ по п. 1, содержащий следующий этап, выполняемый назначающим устройством:
- графическое представление оператору, посредством человеко-машинного интерфейса назначающего устройства, ассоциаций, полученных на этапе вычисления ассоциаций.
5. Способ по п. 4, содержащий следующий этап, выполняемый назначающим устройством:
- предоставление оператору возможности, посредством человеко-машинного интерфейса, подтвердить или скорректировать графически представленные ему ассоциации.
6. Способ по п. 1, содержащий следующие этапы, выполняемые назначающим устройством:
- проверку ассоциаций, полученных на этапе вычисления ассоциаций; и
- если на этапе проверки обнаружена хотя бы одна ошибка, подачу сигнала оповещения через человеко-машинный интерфейс назначающего устройства и/или выполнение корректирующих операций.
7. Способ по п. 6, отличающийся тем, что этап проверки содержит проверку, является ли измеренная позиция одного из беспроводных устройств сбора сейсмических данных ошибочной позицией.
8. Способ по п. 6, отличающийся тем, что этап проверки содержит проверку, назначены ли несколько (больше одного) беспроводных устройств сбора сейсмических данных одному и тому же топографическому местоположению.
9. Способ по п. 6, отличающийся тем, что этап проверки содержит проверку, отделено ли одно из беспроводных устройств сбора сейсмических данных от ассоциированного с ним топографического местоположения расстоянием, превосходящим заданных порог.
10. Способ по п. 6, отличающийся тем, что этап проверки содержит проверку, нет ли для сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, несоответствия измеренных позиций этих беспроводных устройств сбора сейсмических данных указанному заданному порядку.
11. Способ по п. 6, отличающийся тем, что этап проверки содержит проверку, нет ли для двух соседних беспроводных устройств сбора сейсмических данных из состава сейсмической линии, содержащей множество беспроводных устройств сбора сейсмических данных, расположенных последовательно в заданном порядке, несоответствия измеренных позиций этих двух беспроводных устройств сбора сейсмических данных ассоциированным с ними топографическим местоположениям.
12. Способ по п. 1, отличающийся тем, что назначающее устройство представляет собой центральную станцию сейсмической системы или персональный компьютер мобильного сборщика данных.
13. Способ по п. 1, отличающийся тем, что этап получения измеренных позиций содержит:
- получение измеренных позиций от беспроводных устройств сбора сейсмических данных, эти измеренные позиции вычислены приемниками сигналов спутниковой навигационной системы, входящими в состав беспроводных устройств сбора сейсмических данных.
14. Способ по п. 1, отличающийся тем, что этап получения измеренных позиций содержит:
- получение от беспроводных устройств сбора сейсмических данных первых исходных данных о позициях, соответствующих информации о позициях, генерируемой приемниками сигналов спутниковой навигационной системы, когда эти беспроводные устройства сбора сейсмических данных установлены на земле, каждое возле одного из топографических местоположений;
- получение по меньшей мере от одной опорной станции вторых исходных данных о позициях, соответствующих информации о позиции, генерируемой приемником сигналов спутниковой навигационной системы из состава указанной по меньшей мере одной опорной станции;
- вычисление измеренных позиций в функции первых исходных данных о позициях и вторых исходных данных о позициях.
15. Энергонезависимый компьютерный носитель записи, сохраняющий набор команд, которые могут быть выполнены компьютером для осуществления способа автоматического назначения беспроводных устройств сбора сейсмических данных топографическим местоположениям, где каждое беспроводное устройство сбора сейсмических данных содержит приемник сигналов спутниковой навигационной системы, при этом способ содержит следующие этапы, выполняемые назначающим устройством:
- получение топографических местоположений, в которых ожидается размещение соответствующего одного из беспроводных устройств сбора сейсмических данных, при этом топографические местоположения определены прежде, чем начнется развертывание беспроводных устройств сбора сейсмических данных в соответствующих топографических местоположениях и сохранены в файл топографического местоположения на по меньшей мере одном энергонезависимом компьютерном носителе записи;
- получение измеренных позиций беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, предоставляемой приемниками сигналов спутниковой навигационной системы, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических местоположений; и
- вычисление ассоциаций, каждая ассоциация между одним из беспроводных устройств сбора сейсмических данных и соответствующим одним из топографических местоположений, в функции сравнения измеренных позиций с позициями топографических местоположений.
16. Назначающее устройство для автоматического назначения беспроводных устройств сбора сейсмических данных топографическим местоположениям, каждое беспроводное устройство сбора сейсмических данных содержит приемник сигналов спутниковой навигационной системы, указанное назначающее устройство содержит:
- средства для получения топографических местоположений, в которых ожидается размещение соответствующего одного из беспроводных устройств сбора сейсмических данных, при этом топографические местоположения определены прежде, чем начнется развертывание беспроводных устройств сбора сейсмических данных в соответствующих топографических местоположениях и сохранены в файл топографического местоположения на по меньшей мере одном энергонезависимом компьютерном носителе записи;
- средства для получения измеренных позиций беспроводных устройств сбора сейсмических данных, соответствующих или полученных на основе информации о позициях, генерируемой приемниками сигналов спутниковой навигационной системы, когда беспроводные устройства сбора сейсмических данных установлены на земле, каждое рядом с одним из топографических местоположений; и
- средства для вычисления ассоциаций, каждая ассоциация между одним из беспроводных устройств сбора сейсмических данных и соответствующим одним из топографических местоположений, в функции сравнения измеренных позиций с позициями топографических местоположений.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 8577660 B2, 05.11.2013 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| УСТРОЙСТВО И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ, СИСТЕМА СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2004 |
|
RU2450255C2 |

