Перекрестная ссылка на родственную заявку
По данной заявке испрашивается приоритет согласно предварительной патентной заявке США №60/839854, озаглавленной "FAST BIT EDGE DETECTION ON LEGACY GPS USING NEW GNSS SIGNALS", которая подана 23 августа 2006 г. Вышеупомянутая заявка полностью включена в данный документ посредством ссылки.
Область техники, к которой относится изобретение
Объект изобретения, раскрытый в данном документе, относится к определению местоположения на основе сигналов, принимаемых от геолокационных спутников.
Уровень техники
Спутниковая система определения местоположения (SPS) типично содержит систему орбитальных спутников Земли, дающих возможность объектам определять свое местоположение на Земле, по меньшей мере, частично на основе сигналов, принимаемых от спутников. Такой спутник SPS типично передает сигнал, маркированный кодом повторяющегося псевдослучайного шума (PN) из заданного числа элементарных посылок. Например, спутник в группировке глобальной навигационной спутниковой системы (GNSS), такой как GPS или Galileo, может передавать сигнал, маркированный PN-кодом, который отличается от PN-кодов, передаваемых посредством других спутников в группировке.
Чтобы оценить местоположение в приемном устройстве, навигационная система может выполнить измерения псевдодальности до спутников "в поле зрения" приемного устройства, используя известные методы, по меньшей мере, частично на основе обнаружений PN-кодов в сигналах, принимаемых от спутников. Такая псевдодальность до спутника может быть определена, по меньшей мере, частично на основе фазы кода, обнаруженного в принимаемом сигнале, маркированном PN-кодом, ассоциированным со спутником, во время процесса обнаружения принимаемого сигнала в приемном устройстве. Чтобы обнаружить принимаемый сигнал, навигационная система типично выполняет корреляцию принимаемого сигнала с локально формируемым PN-кодом, ассоциированным со спутником. Например, такая навигационная система типично выполняет корреляцию этого принимаемого сигнала с несколькими сдвинутыми по коду и/или времени версиями данного локально формируемого PN-кода. Обнаружение конкретной сдвинутой по времени и/или по коду версии, дающее в результате результат корреляции с самой высокой мощностью сигнала, может указать фазу кода, ассоциированную с обнаруженным сигналом, для использования при измерении псевдодальности, как пояснено выше.
После обнаружения фазы кода сигнала, принимаемого от GNSS-спутника, приемное устройство может сформировать несколько гипотез псевдодальности. Используя дополнительную информацию, приемное устройство может исключать такие гипотезы псевдодальности, чтобы фактически уменьшить неоднозначность, ассоциированную с истинным измерением псевдодальности. В дополнение к кодированию с помощью последовательности периодически повторяющегося PN-кода, сигнал, передаваемый посредством GNSS-спутника, также может модулироваться посредством дополнительной информации, такой как, например, сигнал данных и/или известная последовательность значений. Посредством обнаружения такой дополнительной информации в сигнале, принимаемом от GNSS-спутника, приемное устройство может исключить гипотезы псевдодальности, ассоциированные с принимаемым сигналом.
Фиг.1A иллюстрирует применение SPS-системы, посредством которого абонентская станция 100 в системе беспроводной связи принимает передачи от спутников 102a, 102b, 102c, 102d в линии прямой видимости до абонентской станции 100 и извлекает измерения времени из четырех или более из передач. Абонентская станция 100 может предоставлять эти измерения в объект определения местоположения (PDE) 104, который определяет положение станции из измерений. Альтернативно, абонентская станция 100 может определять собственное положение из этой информации.
Абонентская станция 100 может выполнять поиск передачи от конкретного спутника посредством коррелирования PN-кода для спутника с принимаемым сигналом. Принимаемый сигнал типично содержит комбинацию передач от одного или более спутников в пределах линии прямой видимости до приемного устройства в станции 100 при наличии шума. Корреляция может быть выполнена по диапазону гипотез фазы кода, известных как окно поиска фазы кода W CP, и по диапазону гипотез доплеровской частоты, известных как окно поиска Доплера W DOPP . Как указано выше, такие гипотезы фазы кода типично представляются как диапазон сдвигов PN-кода. Кроме того, гипотезы доплеровской частоты типично представляются как элементы разрешения доплеровской частоты.
Корреляция типично выполняется за время интегрирования I, которое может быть выражено как произведение Nc и М, где Nc - время когерентного интегрирования, М - число когерентных интегрирований, которые некогерентно комбинируются. Для конкретного PN-кода значения корреляции типично ассоциированы с соответствующими сдвигами PN-кода и элементами разрешения Доплера, чтобы задать двумерную корреляционную функцию. Пики корреляционной функции определяются и сравниваются с заранее определенным шумовым порогом. Порог типично выбирается так, чтобы вероятность ложного оповещения, вероятность ложного обнаружения спутниковой передачи была равна или ниже заранее определенного значения. Измерение времени для спутника типично выводится из местоположения самого раннего пика небокового лепестка вдоль измерения фазы кода, которое равняется или превышает порог. Измерение Доплера для абонентской станции может быть извлечено из местоположения самого раннего пика небокового лепестка по размерности доплеровской частоты, которое равняется или превышает порог.
Разрешение неоднозначностей гипотез псевдодальности, ассоциированных с обнаруженными GNSS-сигналами, потребляет ресурсы обработки и мощность. Это потребление мощности и ресурсов обработки типично является важнейшим проектным ограничением в портативных продуктах, таких как мобильные телефоны и другие устройства.
Краткое описание чертежей
Неограничивающие и неисчерпывающие признаки будут описаны со ссылкой на следующие чертежи, на которых аналогичные ссылочные позиции относятся к аналогичным элементам на всех чертежах.
Фиг.1A - схематичное представление спутниковой системы определения местоположения (SPS) согласно одному аспекту.
Фиг.1B - временная схема, иллюстрирующая гипотезы псевдодальности принимаемого GNSS-сигнала согласно одному аспекту.
Фиг.2 показывает схематичное представление системы, которая допускает определение местоположения в приемном устройстве посредством измерения псевдодальности до космических аппаратов (SV) согласно одному аспекту.
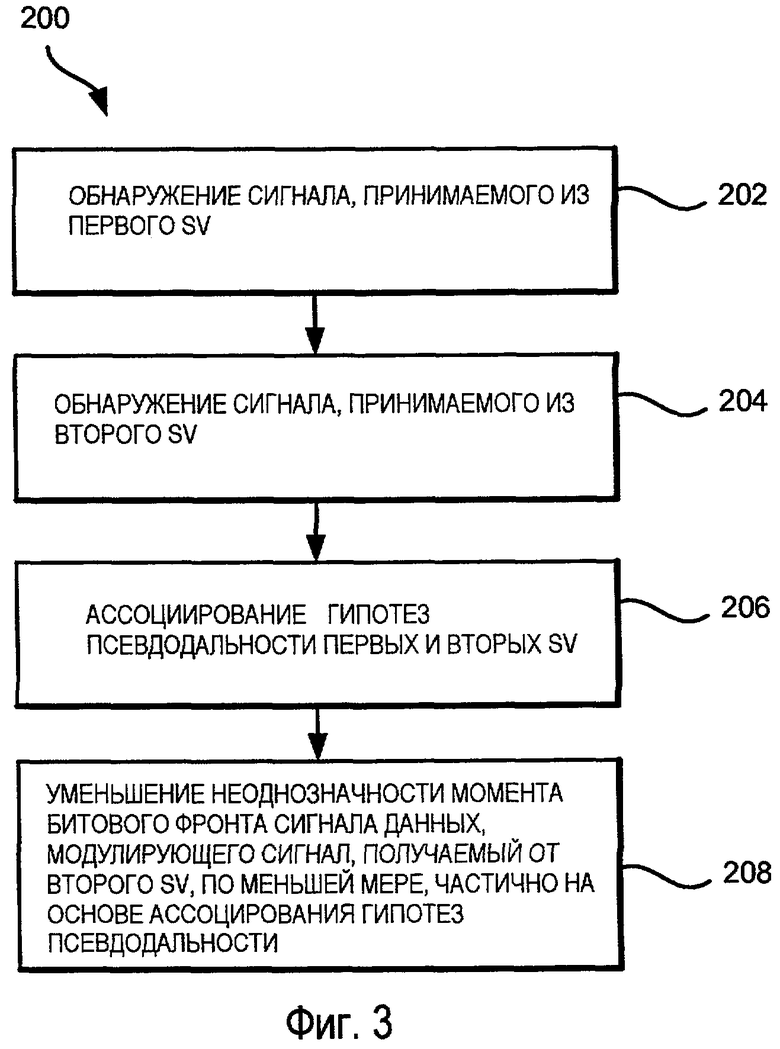
Фиг.3 - блок-схема последовательности операций, иллюстрирующая процесс для уменьшения неоднозначностей в сигнале, полученном от SV, согласно одному аспекту.
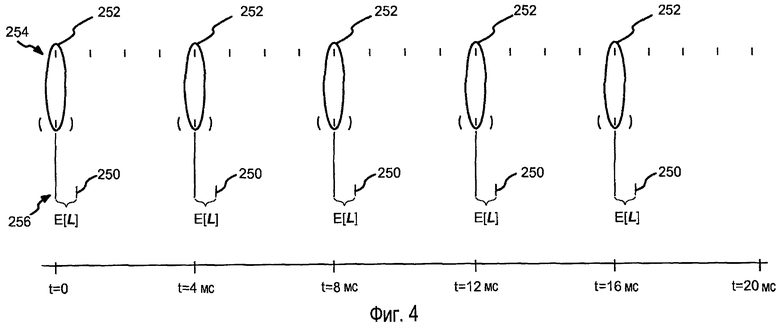
Фиг.4 - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, полученных от различных SV, согласно одному аспекту.
Фиг.5A - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, полученных от различных SV, согласно альтернативному признаку.
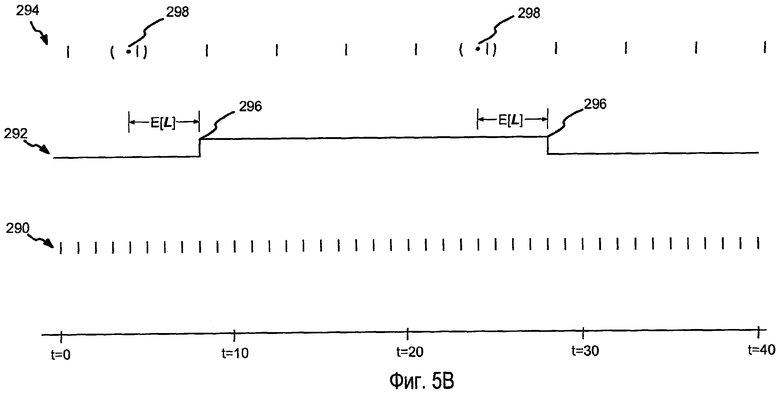
Фиг.5B - временная схема, иллюстрирующая использование обнаружения битового фронта сигнала данных, модулирующего первый сигнал SPS, при обнаружении второго SPS-сигнала согласно альтернативному признаку.
Фиг.6A - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, обнаруженных от различных SV, согласно альтернативному признаку.
Фиг.6B - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, полученных от различных SV, согласно альтернативному признаку.
Фиг.6C - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, полученных от различных SV, согласно альтернативному признаку.
Фиг.6D - временная схема, иллюстрирующая ассоциацию гипотез псевдодальности, выведенных из сигналов, полученных от различных SV, согласно альтернативному признаку.
Фиг.7 - схематичное представление двумерной области, в который следует выполнять поиск для обнаружения сигнала, передаваемого от космического аппарата, согласно одному аспекту.
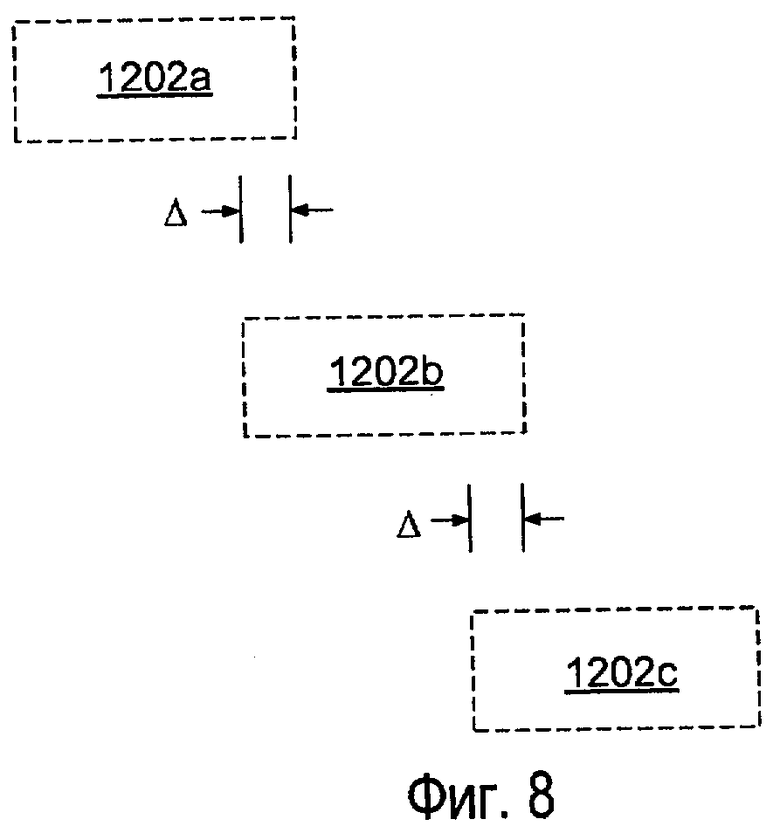
Фиг.8 иллюстрирует перекрытие на назначенное число символов псевдошумовой последовательности в окне поиска, чтобы избежать пропуска пиков, которые появляются на границах сегмента, согласно одному аспекту.
Фиг.9 - схематичное представление системы для обработки сигналов, чтобы определять местоположение, согласно одному аспекту.
Фиг.10 - схематичное представление абонентской станции согласно одному аспекту.
Раскрытие изобретения
В одном аспекте первый SPS-сигнал, принимаемый в приемном устройстве из первого SV, модулируется посредством сигнала данных. В одном конкретном признаке, проиллюстрированном в данном документе, система и способ направлены на уменьшение неоднозначности битового фронта в сигналах данных, по меньшей мере, частично на основе информации во втором SPS-сигнале, принимаемом в приемном устройстве. Тем не менее, следует понимать, что это только один конкретный признак согласно конкретному примеру, проиллюстрированному в данном документе, и что заявленный объект изобретения не ограничен в этом отношении.
Подробное описание
Ссылки по всему данному подробному описанию на "один пример", "один признак", "пример" или "признак" означают, что конкретный признак, структура или характеристика, описанная в связи с признаком и/или примером, включена, по меньшей мере, в один признак и/или пример заявленного объекта изобретения. Таким образом, появления фразы "в одном примере", "пример", "в одном признаке" или "признак" в различных местах по всему данному подробному описанию не обязательно все ссылаются на один и тот же признак и/или пример. Кроме того, конкретные признаки, структуры или характеристики могут комбинироваться в одном или более примеров и/или признаков.
Методологии, описанные в данном документе, могут быть реализованы различными средствами в зависимости от вариантов применения согласно конкретным признакам и/или примерам. Например, эти методологии могут быть реализованы в аппаратных средствах, микропрограммном обеспечении, программном обеспечении и/или комбинациях вышеозначенного. При реализации в аппаратных средствах блоки обработки могут быть реализованы в одной или нескольких специализированных интегральных схемах (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных устройствах, предназначенных для того, чтобы выполнять описанные в данном документе функции, и/или в комбинациях вышеозначенного.
"Инструкции", упоминаемые в данном документе, относятся к выражениям, которые представляют одну или более логических операций. Например, инструкции могут быть "машиночитаемыми", будучи поддающимися интерпретации посредством машины для выполнения одной или более операций для одного или более объектов данных. Тем не менее, это просто пример инструкций, и заявленный объект изобретения не ограничен в этом отношении. В другом примере инструкции, упоминаемые в данном документе, могут относиться к кодированным командам, которые являются исполняемыми посредством схемы обработки, имеющей набор команд, который включает в себя кодированные команды. Такая инструкция может быть кодирована в форме машинного языка, понятного для схемы обработки. К тому же это просто примеры инструкций, и заявленный объект изобретения не ограничен в этом отношении.
"Носитель хранения данных", упоминаемый в данном документе, относится к носителям, допускающим хранение выражений, которые воспринимаются посредством одной или более машин. Например, носитель хранения данных может содержать одно или более устройств хранения для хранения машиночитаемых инструкций и/или информации. Эти устройства хранения могут содержать любой из нескольких типов носителей, включая, например, магнитные, оптические или полупроводниковые носители хранения данных. Эти запоминающие устройства также могут содержать любой тип долговременных, кратковременных, энергозависимых или энергонезависимых запоминающих устройств. Тем не менее, это просто примеры носителей хранения, и заявленный объект изобретения не ограничен в этом отношении.
Если прямо не указано иное, как очевидно от нижеследующего пояснения, следует принимать во внимание, что в данном подробном описании пояснения, использующие такие термины, как "обработка", "вычисление", "расчет", "выбор", "формирование", "предоставление", "запрещение", "определение местонахождения", "завершение", "идентификация", "инициализация", "обнаружение", "получение", "выступание в качестве хоста", "хранение", "представление", "оценка", "уменьшение", "ассоциативное связывание", "прием", "передача", "определение" и/или т.п., упоминаются как действия и/или процессы, которые могут быть выполнены посредством вычислительной платформы, такой как компьютер или аналогичное электронное вычислительное устройство, которое обрабатывает и/или преобразует данные, представленные как физические электронные и/или магнитные величины и/или другие физические величины, в процессорах, запоминающих устройствах, регистрах и/или других устройствах хранения информации, передачи, приема и/или отображения вычислительной платформы. Эти действия и/или процессы могут быть выполнены посредством вычислительной платформы под управлением машиночитаемых инструкций, сохраненных в носителе хранения данных, например. Эти машиночитаемые инструкции могут содержать, например, программное обеспечение или микропрограммное обеспечение, сохраненное в носителе хранения данных, включенном как часть вычислительной платформы (к примеру, включенном как часть схемы обработки или внешнем к такой схеме обработки). Дополнительно, если прямо не указано иное, процесс, описанный в данном документе в отношении блок-схем последовательности операций или иных элементов, также может выполняться и/или управляться, полностью или частично, посредством этой вычислительной платформы.
"Космический аппарат" (SV), упоминаемый в данном документе, относится к объекту, который допускает передачу сигналов в приемные устройства на поверхности Земли. В одном конкретном примере такой SV может содержать геостационарный спутник. Альтернативно, SV может содержать спутник, перемещающийся на орбите и двигающийся относительно постоянной позиции на Земле. Тем не менее, это просто примеры SV, и заявленный объект изобретения не ограничен в этом отношении.
"Местоположение", упоминаемое в данном документе, относится к информации, ассоциированной с местонахождением объекта или предмета согласно точке отсчета. При этом, например, такое местоположение может быть представлено как географические координаты, такие как широта и долгота. В другом примере такое местоположение может быть представлено как геоцентрические координаты XYZ. В еще одном примере это местоположение может быть представлено как фактический адрес, населенный пункт или другая подведомственная государственная территория, почтовый индекс и/или подобное. Тем не менее, это просто примеры того, как местоположение может быть представлено согласно конкретным примерам, и заявленный объект изобретения не ограничен в этих отношениях.
Методы определения и/или оценки местоположения, описанные в данном документе, могут использоваться для различных сетей беспроводной связи, таких как беспроводная глобальная вычислительная сеть (WWAN), беспроводная локальная вычислительная сеть (WLAN), беспроводная персональная сеть (WPAN) и так далее. Термины "сеть" и "система" могут быть использованы взаимозаменяемо в данном документе. WWAN может быть сетью множественного доступа с кодовым разделением (CDMA), сетью множественного доступа с временным разделением (TDMA), сетью множественного доступа с частотным разделением (FDMA), сетью множественного доступа с ортогональным частотным разделением (OFDMA), сетью множественного доступа с частотным разделением с одной несущей (SC-FDMA) и т.д. CDMA-сеть может реализовывать одну или более технологий радиосвязи, например, cdma2000, широкополосный CDMA (W-CDMA) и т.д., упоминая лишь некоторые из технологий радиосвязи. Здесь cdma2000 может включать в себя технологии, реализованные согласно стандартам IS-95, IS-2000 и IS-856. TDMA-сеть может реализовывать глобальную систему мобильной связи (GSM), цифровую усовершенствованную систему мобильной телефонной связи (D-AMPS) или какую-либо другую RAT. GSM и W-CDMA описываются в документах от консорциума с названием Проект партнерства по созданию третьего поколения (3GPP). Cdma2000 описывается в документах от консорциума с названием Проект партнерства по созданию третьего поколения 2 (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. WLAN может содержать сеть IEEE 802.11x, а WPAN может содержать, например, Bluetooth-сеть, IEEE 802.15x. Эти методы определения местоположения, описанные в данном документе, также могут использоваться для любой комбинации WWAN, WLAN и/или WPAN.
Согласно примеру, устройство и/или система могут оценивать свое местоположение, по меньшей мере, частично на основе сигналов, принимаемых от SV. В частности такое устройство и/или система могут получать измерения "псевдодальности", содержащие аппроксимации расстояний между ассоциированными SV и навигационным спутниковым приемным устройством. В конкретном примере такая псевдодальность может быть определена в приемном устройстве, которое допускает обработку сигналов из одного или более SV как часть спутниковой системы определения местоположения (SPS). Эта SPS может содержать, например, систему глобального позиционирования (GPS), Galileo, Glonass, среди прочего, или любую SPS, разработанную в будущем. Чтобы определять свое местоположение, спутниковое навигационное приемное устройство может получать измерения псевдодальности от трех или более спутников, а также их положения во время передачи. Зная орбитальные параметры SV, эти положения могут быть вычислены для любого момента времени. Измерение псевдодальности затем может быть определено, по меньшей мере, частично на основе времени, которое сигнал проходит от SV в приемное устройство, умноженного на скорость света. Хотя методы, описанные в данном документе, могут быть предоставлены как реализации определения местоположения в SPS типов GPS и/или Galileo в качестве конкретных иллюстраций согласно конкретным примерам, следует понимать, что эти методы также могут применяться к другим типам SPS, и что заявленный объект изобретения не ограничен в этом отношении.
Методы, описанные в данном документе, могут использоваться с любыми из нескольких SPS, включая, к примеру, вышеупомянутую SPS. Кроме того, такие методы могут использоваться в системах определения положения, которые используют псевдоспутники или комбинацию спутников и псевдоспутники. Псевдоспутники могут содержать наземные передающие устройства, которые передают в широковещательном режиме PN-код или другой код измерения дальности (к примеру, подобный GPS или сотовому сигналу CDMA), модулированный на несущем сигнале L-полосы (или другой частоты), который может синхронизироваться с GPS-временем. Такому передающему устройству может быть назначен уникальный PN-код, чтобы разрешить идентификацию посредством удаленного приемного устройства. Псевдоспутники используются в случаях, когда GPS-сигналы из орбитального спутника могут быть недоступны, например, в туннелях, шахтах, зданиях, городских "каньонах" или других огороженных участках. Другая реализация псевдоспутников известна как радиомаяки. Термин "спутник", при использовании в данном документе, имеет намерение включать в себя псевдоспутники, эквиваленты псевдоспутников и возможно другие элементы. Термин "сигналы SPS", при использовании в данном документе, имеет намерение включать в себя SPS-подобные сигналы от псевдоспутников или эквивалентов псевдоспутников.
Глобальная навигационная спутниковая система (GNSS), упоминаемая в данном документе, относится к SPS, содержащей SV, передающие синхронизированные навигационные сигналы согласно общему формату служебных сигналов. Такая GNSS может содержать, например, группировку SV на синхронизированных орбитах, чтобы передавать навигационные сигналы в местоположения на обширной части поверхности Земли одновременно из нескольких SV в группировке. SV, которое является членом конкретной группировки GNSS, типично передает навигационные сигналы в формате, который уникален для конкретного формата GNSS. Соответственно, методы для обнаружения навигационного сигнала, передаваемого посредством SV в первой GNSS, могут быть изменены для обнаружения навигационного сигнала, передаваемого посредством SV во второй GNSS. В конкретном примере, хотя заявленный объект изобретения не ограничен в этом отношении, следует понимать, что GPS, Galileo и Glonass все представляют GNSS, которая отличается от других двух названных SPS. Тем не менее, это просто примеры SPS, ассоциированной с различными GNSS, и заявленный объект изобретения не ограничен в этом отношении.
Согласно одному признаку, навигационное приемное устройство может получать измерение псевдодальности до конкретного SV, по меньшей мере, частично на основе обнаружения сигнала от конкретного SV, который кодирован с помощью последовательности периодически повторяющегося PN-кода. Обнаружение данного сигнала может содержать обнаружение "фазы кода", которая ориентирована на время и ассоциированную точку в последовательности PN-кода. В одном конкретном признаке, например, такая фаза кода может быть ориентирована на локально формируемый синхросигнал и конкретную элементарную посылку последовательности PN-кода. Тем не менее, это просто пример того, как фаза кода может быть представлена, и заявленный объект изобретения не ограничен в этом отношении.
Согласно примеру, обнаружение сдвига кода может предоставлять несколько неоднозначных вариантов псевдодальности или гипотез псевдодальности в интервалах PN-кода. Соответственно, навигационное приемное устройство может получать измерение псевдодальности до SV, по меньшей мере, частично на основе обнаруженной фазы кода и разрешения неоднозначностей, чтобы выбрать одну из гипотез псевдодальности в качестве "истинного" измерения псевдодальности до SV. Как указано выше, навигационное приемное устройство может оценивать свое местоположение, по меньшей мере, частично на основе измерений псевдодальности, полученных из нескольких SV.
Согласно примеру, хотя заявленный объект изобретения не ограничен в этом отношении, сигнал, передаваемый от SV, может модулироваться с помощью одного или более сигналов данных за заранее определенные периоды и в заранее определенной последовательности. В формате GPS-сигнала, например, SV может передавать сигнал, который кодирован с помощью известной последовательности PN-кода, которая повторяется с интервалами в миллисекунду. Помимо этого, такой сигнал может модулироваться с помощью сигнала данных, который может изменяться, например, с заранее определенными интервалами в 20 мс. Согласно конкретному примеру, хотя заявленный объект изобретения не ограничен в этом отношении, такой сигнал данных и последовательность повторяющегося PN-кода могут быть комбинированы в операции суммирования по модулю 2 до смешивания с радиочастотным несущим сигналом для передачи от SV.
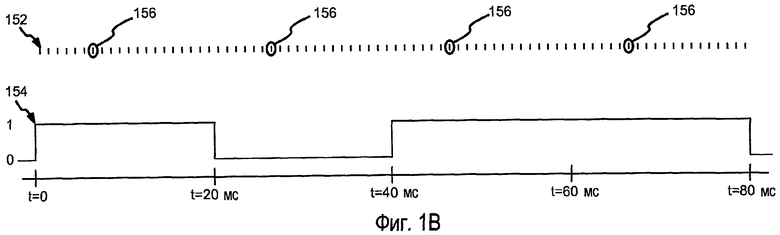
Фиг.1B - это временная схема, иллюстрирующая гипотезы 152 псевдодальности, наложенные на сигнал 154 данных в сигнале, принимаемом в опорном местоположении от SV в группировке GPS согласно примеру. При этом битовый интервал в сигнале 154 данных может иметь длину 20 мс и распространяться более чем на двадцать гипотез 152 псевдодальности, которые определяются, по меньшей мере, частично на обнаружении сдвига кода в последовательности повторяющегося PN-кода в 1,0 мс. Посредством выбора одной из гипотез 156 псевдодальности в пределах битового интервала 20 мс приемное устройство может определить границы между интервалами битов данных в 20 мс или "битовые фронты", секционирующие последовательные биты в сигнале 154 данных.
Согласно примеру, хотя заявленный объект изобретения не ограничен в этом отношении, приемное устройство может обнаруживать битовый фронт и/или границу между битовыми интервалами в сигнале данных, модулирующем сигнал, принимаемый от одного SV, по меньшей мере, частично на основе сигнала, принимаемого от другого SV. При этом гипотезы псевдодальности первого сигнала могут быть ассоциированы с гипотезами псевдодальности второго сигнала. По меньшей мере, частично на основе такой ассоциации между гипотезами псевдодальности первого сигнала и гипотезами псевдодальности второго сигнала приемное устройство может разрешать неоднозначности в совмещении и/или фазе битового фронта в модулированном сигнале относительно истинной псевдодальности. Тем не менее, это просто пример, и заявленный объект изобретения не ограничен в этом отношении.
Фиг.2 показывает схематичное представление системы, которая допускает определение местоположения в приемном устройстве посредством измерения псевдодальности до SV согласно примеру. Приемное устройство в центре 166 опорного местоположения на поверхности 168 Земли может наблюдать и принимать сигналы от SV1 и SV2. Центр 166 опорного местоположения, как может быть известно, находится в пределах области 164 опорного местоположения, заданной, например, посредством окружности радиуса приблизительно 10 км. Следует понимать, тем не менее, что это просто пример того, как неопределенность оцененного местоположения может быть представлена согласно конкретному аспекту, и заявленный объект изобретения не ограничен в этом отношении. В одном примере область 164 может содержать зону покрытия конкретной соты сотовой сети беспроводной связи в известном местоположении.
Согласно примеру, приемное устройство в области 164 опорного местоположения может обмениваться данными с другими устройствами, такими как, например, сервер (не показан), по линии беспроводной связи, например, в сети спутниковой связи или наземной сети беспроводной связи. В одном конкретном примере такой сервер может передавать сообщение помощи в обнаружении (AA) в приемное устройство, содержащее информацию, используемую приемным устройством для того, чтобы обрабатывать сигналы, принимаемые от SV, и/или получать измерения псевдодальности. Альтернативно, такие сообщения AA могут быть предоставлены из информации, локально сохраненной в запоминающем устройстве приемного устройства. Здесь такая локально сохраненная информация может быть сохранена в локальном запоминающем устройстве со съемного запоминающего устройства и/или извлечена из предыдущего сообщения AA, принимаемого от сервера, если привести несколько примеров. В конкретном примере сообщения AA могут содержать такую информацию как, например, информация, указывающая местоположения SV1 и SV2, оценку местоположения центра 166 опорного местоположения, неопределенность, ассоциированную с оцененным местоположением, оценку текущего времени и/или т.п. Такая информация, служащая признаком позиций SV1 и SV2, может содержать информацию эфемериды и/или информацию календаря. Как указано ниже, согласно конкретным примерам приемное устройство может оценивать позиции SV1 и SV2 по меньшей мере, частично на основе такой эфемериды и/или календаря и грубой оценки времени. Эта оцененная позиция SV может содержать, например, оцененный азимутальный угол от опорного направления и угол возвышения от горизонта Земли в центре 166 опорного местоположения и/или геоцентрические координаты XYZ.
Согласно примеру, SV1 и SV2 могут быть членами одинаковых или различных группировок GNSS. В конкретных примерах, проиллюстрированных ниже, SV1 может быть членом группировки GPS, в то время как SV2 может быть членом группировки Galileo. Следует понимать, тем не менее, что это просто пример того, как приемное устройство может принимать сигналы от SV, принадлежащих различным группировкам GNSS, и заявленный объект изобретения не ограничен в этом отношении.
Фиг.3 - это блок-схема последовательности операций процесса 200 для уменьшения неоднозначностей в сигнале, принимаемом от SV, согласно примеру. При этом приемное устройство в области опорного местоположения может принимать первый сигнал, закодированный с помощью первого периодически повторяющегося PN-кода, от первого SV (к примеру, SV1), и принимать второй сигнал, закодированный с помощью второго периодически повторяющегося PN-кода, от второго SV (к примеру, SV2). Чтобы обнаруживать первый сигнал на этапе 202, это приемное устройство может обнаруживать доплеровскую частоту и фазу кода в принимаемом сигнале. Такое обнаружение фазы кода может содержать, например, корреляцию сдвинутых по коду и/или по времени версий локально формируемой кодовой последовательности с принимаемым первым сигналом, как проиллюстрировано ниже. В одном примере, если принимаемый сигнал передается от SV Galileo, например, такой сдвиг кода может быть обнаружен в пределах повторяющегося периода в 4,0 мс последовательности PN-кода. Альтернативно, если принимаемый сигнал передается от SV GPS, такой сдвиг кода может быть обнаружен в пределах повторяющегося периода в 1,0 мс последовательности PN-кода. Тем не менее, это просто пример того, как сигнал от SV конкретного GNSS может быть обнаружен, и заявленный объект изобретения не ограничен в этом отношении.
В одной конкретной альтернативе первый и второй SV могут быть из группировки GPS, в то время как, по меньшей мере, один из этих двух SV допускает передачу сигнала L1C. Аналогично навигационному сигналу от SV Galileo, навигационный сигнал L1C может содержать сигнал, закодированный с помощью последовательности периодически повторяющегося PN-кода в 4,0 мс. Соответственно, следует понимать, что, хотя конкретные примеры, поясненные в данном документе, могут относиться к использованию SV из группировок Galileo и GPS, такие методы также могут применяться к другим примерам, использующим два SV GPS, где, по меньшей мере, один из SV допускает передачу сигнала L1C. К тому же это просто примеры конкретных сигналов, которые могут быть приняты от SPS в приемном устройстве в области опорного местоположения, и заявленный объект изобретения не ограничен в этом отношении.
На этапе 204 может обнаруживаться второй сигнал, принимаемый от второго SV с использованием методов, поясненные выше в связи с этапом 202. Следует понимать, тем не менее, что второй принимаемый сигнал может быть передан согласно формату GNSS, который отличается от формата GNSS, используемого для передачи первого сигнала. При этом, например, первый принимаемый сигнал может быть передан от SV в группировке GPS, в то время как второй принимаемый сигнал может быть передан от SV в группировке Galileo. Альтернативно, первый принимаемый сигнал может быть передан от SV в группировке Galileo, в то время как второй принимаемый сигнал может быть передан из группировки GPS. Следует понимать, тем не менее, что это просто примеры того, как приемное устройство может принимать сигналы от SV, принадлежащих различным группировкам GNSS, и заявленный объект изобретения не ограничен в этом отношении.
При обнаружении сигнала от SV (к примеру, как проиллюстрировано выше в отношении этапов 202 и 204) приемное устройство может определить гипотезы псевдодальности из обнаружений фазы кода. В конкретном примере, если SV передает сигнал согласно формату GPS, например, приемное устройство может определять гипотезы псевдодальности с интервалами в 1,0 мс и/или с приращениями приблизительно в 3,0 x 105 метров, по меньшей мере, частично на основе фазы последовательности периодически повторяющегося PN-кода, обнаруженной в сигнале, обнаруженном в приемном устройстве. В другом примере, где SV передает сигнал согласно формату Galileo, например, гипотезы псевдодальности могут быть определены с интервалами в 4,0 мс и/или с приращениями приблизительно в 1,2 x 106 метров, по меньшей мере, частично на основе фазы последовательности периодически повторяющегося PN-кода, обнаруженной в сигнале, обнаруженном в приемном устройстве. При обнаружении фазы последовательности PN-кода в сигнале, передаваемом посредством SV, приемное устройство может использовать, например, информацию, предоставленную в приемное устройство в сообщении AA. Тем не менее, это просто пример того, как приемное устройство может обнаруживать фазу периодической последовательности PN-кода сигнала, передаваемого от SV, и заявленный объект изобретения не ограничен в этом отношении.
Согласно примеру, этап 206 может ассоциировать гипотезы псевдодальности сигнала, принимаемого от первого SV (SV1), с гипотезами псевдодальности сигнала, принимаемого от второго SV (SV2). Как проиллюстрировано на фиг.4, согласно конкретному примеру гипотезы 254 псевдодальности из сигнала, принимаемого в области опорного местоположения от первого SV в группировке GPS, ассоциированы с гипотезами 256 псевдодальности из сигнала, принимаемого в области опорного местоположения от второго SV в группировке Galileo, по меньшей мере, частично на основе оцененной разности между дальностью до первого SV от центра опорного местоположения и дальностью до второго SV от центра опорного местоположения. При этом следует заметить, что дальность от опорного местоположения до первого SV может отличаться от дальности от опорного местоположения до второго SV. В конкретном примере, информация, предоставленная в приемное устройство (к примеру, в области 164 опорного местоположения) в сообщении AA, может использоваться для того, чтобы оценивать эту разность в дальности до первого и второго SV от центра опорного местоположения.
Фактическая разность L может определять разность (например, в единицах времени) между дальностью до первого SV от опорного местоположения и дальностью до второго SV от опорного местоположения. При этом фактическая разность L может быть выражена следующим образом:
L=T2-T1,
где T1 - задержка распространения сигнала от SV1, измеренная в опорном местоположении в данное время; и
T2 - задержка распространения сигнала от SV2, измеренная в опорном местоположении в то же самое данное время.
Чтобы ассоциировать гипотезы 254 псевдодальности с гипотезами 256 псевдодальности, соответственно, приемное устройство может определить оценку разности L (например, в единицах времени) между дальностью до первого SV от центра опорного местоположения и дальностью до второго SV от опорного местоположения согласно соотношению (1) следующим образом:
E[L]=E[T2-T1] (1)
(1)
Поскольку ошибки, ассоциированные с измерениями T2 и T1, могут предполагаться как практически независимые, выражение E[T2-T1] может быть аппроксимировано выражением E[T2]-E[T1]. При этом в конкретном примере значение для выражения E[T2]-E[T1] может быть известно и/или доступно для приемного устройства через сообщение AA в течение конкретного времени. Альтернативно, приемное устройство может извлечь это значение для выражения E[T2]-E[T1] в течение конкретного времени из информации, полученной в этом сообщении AA.
Оценка разности L, E[L], применяемая к ассоциированным гипотезам 254 псевдодальности из 256 согласно соотношению (1), может быть сведена к выражению, которое компенсирует погрешность t тактового генератора приемного устройства, следующим образом:
E[L]=E[T2]-E[T1]=(RSV2/c-τ)-(RSV1/c-τ)=(RSV2-RSV1)/c,
где c - скорость света;
τ - систематическая погрешность тактового генератора приемного устройства;
RSV1 - оценка дальности до SV1 от центра опорного местоположения; и
RSV2 - оценка дальности до SV2 от центра опорного местоположения.
При этом следует заметить, что значение для оценки E[L] разности может быть выражено в единицах или линейной длины, или времени, и это преобразование между единицами данного выражения для значения E[L] может быть предоставлено посредством скорости света, выраженной в соответствующих единицах. Соответственно, следует понимать, что это значение для оценки E[L] разности может выражаться взаимозаменяемо или в единицах времени, или в единицах линейной длины без отклонения от заявленного объекта изобретения.
Согласно примеру, этап 206 может вычислить оцененную разность между дальностью от центра 166 опорного местоположения до SV1 (RSV1) и дальностью от центра 166 опорного местоположения до SV2 (RSV2). При этом этап 206 может получать информацию АА из одного или более сообщений АА, указывающую, например, оценки местоположений SV1 и SV2 в геоцентрических координатах XYZ в дополнение к оценке геоцентрических координат XYZ для центра 166 опорного местоположения. Используя такие геоцентрические координаты XYZ, этап 206 может вычислять евклидовы расстояния для RSV1 и RSV2.
Фиг.4 - это временная схема, иллюстрирующая ассоциацию гипотез псевдодальности за продолжительность в 20 мс, начинающуюся в t=0 и заканчивающуюся в t=20 мс, как показано горизонтальными линиями времени, отмечающими 0 мс, 4 мс, 8 мс, 12 мс, 16 мс и 20 мс. В этом конкретном примере, соответственно, битовый фронт сигнала данных, модулирующего GPS-сигнал, может возникнуть в некоторый момент между t=0 и t=20 мс. При этом гипотезы 254 псевдодальности, выведенные из сигнала, принимаемого в области опорного местоположения от SV GPS, например, могут быть определены с приращениями в 1,0 мс, например, как показано колонкой из маленьких вертикальных штрихов, представленных с периодом в 1.0 мс параллельно с осью времени, и начинающихся в данном примере в точке t=0 мс, причем каждый четвертый штрих представляет собой гипотезы 252 псевдодальности, которые помещены на рисунке в овал. При этом гипотезы 256 псевдодальности, выведенные из сигнала, принимаемого в области опорного местоположения от SV Galileo, например, могут быть определены с приращениями в 4,0 мс, например, как показано другой колонкой из маленьких вертикальных штрихов (помечены, как гипотезы 250 псевдодальности), расположенных параллельно с осью времени, начинающихся в данном примере с небольшим сдвигом от точки t=0 мс, с периодом 4.0 мс. Следует понимать, что в конкретных примерах, проиллюстрированных в отношении фиг.4 и в отношении фиг.5А-6С, следует понимать, что Galileo-сигнал, передаваемый от первого SV, может синхронизироваться с сигналом данных, модулирующим GPS-сигнал, принимаемый от второго SV. Как описывается подробно ниже, согласно примеру, конкретные гипотезы 250 псевдодальности из гипотез 256 псевдодальности могут быть взаимно однозначно ассоциированы с конкретными гипотезами 252 псевдодальности из гипотез 254 псевдодальности посредством оценки разности E[L], как определено выше в соотношении (1), например, как это показано на Фиг.4 длинными вертикальными линиями, расположенными перпендикулярно к оси времени, начиная от овалов и до колонки маленьких вертикальных штрихов (помечены, как гипотезы 250 псевдальности).
Согласно примеру, хотя заявленный объект изобретения не ограничен в этом отношении, точность оценки разности E[L], по меньшей мере, частично основана на величине или степени неопределенности, ассоциированной с оценкой области опорного местоположения (к примеру, выраженной в геоцентрических координатах XYZ). На фиг.4 значение оценки разности E[L] показывается, чтобы быть приблизительно 0,6 мс с односторонней неопределенностью меньше 0,5 мс. Соответственно, гипотеза 250 псевдодальности уникально ассоциируется с гипотезой 252 псевдодальности, которая отделена от гипотез 250 псевдодальности на 0,6+/-0,5 мс. Соответственно, если известно, что оценка разности E[L] является точной в пределах 0,5 мс, конкретные гипотезы 252 псевдодальности из числа гипотез 254 псевдодальности могут быть ассоциированы с конкретной одной гипотезой 250 псевдодальности, как проиллюстрировано на фиг.4. При этом на этапе 208, изображенном на Фиг.3, оставшиеся не ассоциированные гипотезы 254 псевдодальности (например, на Фиг.4, штрихи, которые изображены внутри овалов) могут быть исключены как гипотезы для определения фазы и/или совмещения битового фронта GPS-сигнала данных относительно истинной псевдодальности в пределах интервала битов данных. Как проиллюстрировано на фиг.4, согласно конкретному примеру из двадцати гипотез 254 псевдодальности остаются пять гипотез 252 псевдодальности (например, штрихи, которые изображены внутри овалов), ассоциированных с гипотезами 250 псевдодальности. Соответственно, вместо обработки двадцати гипотез псевдодальности для обнаружения фазы и/или совмещения битового фронта относительно истинной псевдодальности, только пять оставшихся гипотез 252 псевдодальности должны быть обработаны с помощью, например, функции вероятности, применяемой к показателям корреляции, ассоциированным с пятью оставшимися гипотезами 252 псевдодальности. При этом посредством увеличения разделения смежных гипотез псевдодальности с 1,0 мс до 4,0 мс эта функция вероятности позволяет разрешать такую неоднозначность среди пяти оставшихся гипотез 252 псевдодальности быстрее и/или с помощью меньших ресурсов обработки или при более низкой интенсивности входного сигнала.
В примере, проиллюстрированном выше на фиг.4, односторонняя неопределенность меньше 0,5 мс в оценке разности E[L] обеспечивает ассоциацию гипотезы 250 псевдодальности с одной гипотезой 252 псевдодальности. В других примерах, тем не менее, такая односторонняя неопределенность в 0,5 мс в оценке разности E[L] может превысить 0,5 мс, имея результатом ассоциацию двух или больше гипотез псевдодальности. При этом такая функция вероятности также может применяться для разрешения этих дополнительных неоднозначностей.
В альтернативном примере приемное устройство может исключить гипотезы псевдодальности для обнаружения фазы и/или совмещения битового фронта в обнаруженном GPS-сигнале посредством декодирования контрольного канала на Galileo-сигнале. При этом такой контрольный канал Galileo-сигнала может быть кодирован с помощью известной последовательности данных, которая повторяется с периодами в 100 мс, где последовательность данных в 100 мс накладывается на двадцать пять последовательных периодов в 4,0 мс и/или последовательностей повторяющегося PN-кода. Обнаружение сдвига кода в последовательности PN-кода в 4,0 мс при обнаружении Galileo-сигнала может предоставить двадцать пять гипотез для совмещения последовательности данных в 100 мс относительно истинной псевдодальности. Чтобы выбрать среди этих двадцати пяти гипотез, приемное устройство может определить фазовое совмещение последовательности данных в 100 мс посредством последовательного коррелирования до двадцати пяти возможных сдвигов в 4,0 мс, по меньшей мере, части последовательности данных в 100 мс с принимаемым Galileo-сигналом, пока результат не превышает заранее определенный порог, например. Когда результат превышает заранее определенный порог, приемное устройство может выбрать ассоциированное совмещение обнаруженного сдвига кода относительно последовательности данных в 100 мс из числа двадцати пяти гипотез совмещения.
Как проиллюстрировано на фиг.5А, согласно конкретному примеру, после того как совмещение обнаруженного сдвига кода относительно последовательности данных в 100 мс определено, гипотезы 280 псевдодальности GPS-сигнала за интервал битов данных в 20 мс могут быть ассоциированы с сегментом в 20 мс последовательности данных в 100 мс, содержащей одни гипотезы 286 псевдодальности, посредством оценки разности Е[L], определенной согласно соотношению (1). К тому же в целях иллюстрации односторонняя неопределенность в этой оценке разности показана как меньше, чем 0,5 мс. При этом одна гипотеза 284 псевдодальности, среди гипотез 280 псевдодальности, ассоциирована с одной гипотезой 286 псевдодальности.
Соответственно, совмещение битового фронта относительно истинной псевдодальности принимаемого GPS-сигнала может быть однозначно обнаружено в принимаемом сигнале данных. Также в других примерах, тем не менее, эта односторонняя неопределенность 0,5 мс в оценке разности E[L] может превысить 0,5 мс, имея результатом ассоциацию двух или более гипотез псевдодальности. К тому же функция вероятности также может применяться для разрешения этих дополнительных неоднозначностей.
В другом конкретном примере обнаружение битового фронта сигнала данных, модулирующего сигнал, принимаемый от SV GPS в точке отсчета, может помочь в обнаружении сигнала, принимаемого от SV Galileo. Как проиллюстрировано на фиг.5В, обнаруженный GPS-сигнал 290 содержит последовательности повторяющегося PN-кода в 1,0 мс и модулируется сигналом 292 данных, имеющим битовые интервалы в 20,0 мс, как проиллюстрировано выше. При этом следует заметить, что любой из таких битовых интервалов в 20,0 мс сигнала 292 данных может ассоциироваться с пятью следующими одна за другой последовательностями повторяющегося PN-кода в 4,0 мс принимаемого Galileo-сигнала 294. Соответственно, посредством обнаружения битового фронта сигнала 292 данных гипотезы 296 псевдодальности в полученном GPS-сигнале могут быть ассоциированы с частями принимаемого Galileo-сигнала 294 посредством оценки разности E[L]. При обнаружении Galileo-сигнала, соответственно, дальность поиска сдвига кода может быть центрирована в момент в принимаемом Galileo-сигнале ассоциированном с псевдодальностью 296, обнаруженной в принятом GPS-сигнале 292, посредством оценки разности E[L]. Такой поиск сдвига кода может затем быть ограничен неопределенностью, ассоциированной с оценкой разности E[L] (которая может быть определена согласно соотношению (3), показанному ниже согласно конкретному примеру).
Согласно примеру, неопределенность в хронировании навигационного сигнала, принимаемого от SV в опорном местоположении, может быть определена из следующих компонентов: неопределенность в хронировании тактового генератора в приемном устройстве; местоположение SV относительно опорного местоположения; и неопределенность в опорном местоположении, где принимается навигационный сигнал. При этом односторонняя неопределенность в хронировании навигационного сигнала, принимаемого от SV в опорном местоположении, SV_Tunc, может быть выражена согласно соотношению (2) следующим образом:

где Clock_Tunc - неопределенность в хронировании тактового генератора в приемном устройстве в единицах времени;
Punc - односторонняя неопределенность в местоположении приемного устройства относительно опорного местоположения в единицах длины;
с - скорость света; и
SV_el - возвышение SV в опорном местоположении.
Согласно примеру, при определенных условиях обнаружение Galileo-сигнала от первого SV в опорном местоположении и точное знание хронирования Galileo-сигнала, принимаемого в опорном местоположении, может помочь в обнаружении GPS-сигнала, принимаемого от второго SV. К тому же, как указано выше, следует понимать, что Galileo-сигнал, передаваемый из первого SV, может синхронизироваться с сигналом данных, модулирующим сигнал GPS, принимаемый из второго SV. Дополнительно следует заметить, что период в 20 мс сигнала данных в принимаемом GPS-сигнале соответствует пяти последовательным периодам в 4,0 мс принимаемого Galileo-сигнала. Соответственно, при наличии достаточной точности в хронировании навигационного сигнала, принимаемого от SV Galileo в опорном местоположении, как определено в соотношении (2) выше, навигационное приемное устройство может ассоциировать начальный или передний фронт конкретного периода в 4,0 мс принимаемого Galileo-сигнала (из числа пяти таких периодов в 4,0 мс) с битовым фронтом в GPS-сигнале, принимаемом в опорном местоположении. Например, такой период в 4,0 мс принимаемого Galileo-сигнала, принимаемого в опорном местоположении, которое известно с достаточной точностью, может быть ассоциирован с битовым фронтом в сигнале данных GPS-сигнала, принимаемого в опорном местоположении, посредством оценки разности E[L], как определено выше согласно соотношению (1). Поскольку хронирование Galileo-сигнала принимается в опорном местоположении с достаточной точностью, передний фронт периода в 4,0 мс может быть ассоциирован с битовым фронтом в GPS-сигнале, принимаемом в опорном местоположении, посредством известной фазы (если применима) и оценки разности E[L].
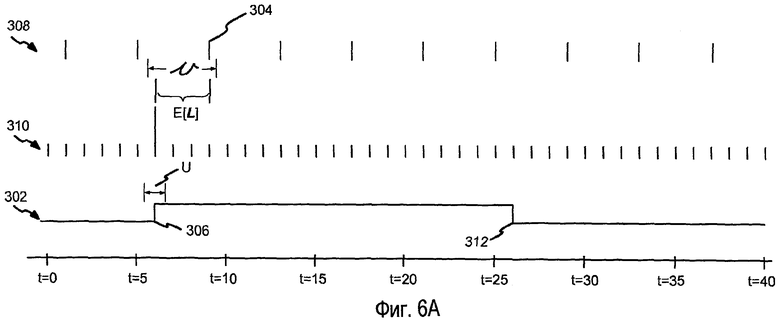
Как показано на фиг.6А, Galileo-сигнал 308, принимаемый от первого SV в области опорного местоположения, может содержать периоды в 4,0 мс, начинающиеся в t=1,0, 5,0, 9,0, 13,0, 17,0, 21,0, 25,0, 29,0, 33,0 и 37,0 мс. GPS-сигнал, принимаемый от второго SV в области опорного местоположения, модулируется посредством повторяющегося PRN-кода 310, содержащего периоды в 1,0 мс, в t=1,0, 2,0, 3,0, 4,0, 5,0, 6,0, 7,0, 8,0 и т.д. мс. При условии, что односторонняя неопределенность в хронировании Galileo-сигнала, принимаемого в области опорного местоположения, как определено согласно соотношению (2), например, находится в пределах 2,0 мс, приемное устройство может ассоциировать конкретный передний фронт 304 периодов в 4,0 мс, которые находятся в пределах областей U двусторонней неопределенности, с началом передачи конкретного периода данных от SV Galileo. Такое начало передачи конкретного периода данных может происходить, например, в начале недели, начале кадра данных, начале сегмента данных и т.д. Поскольку передача сигналов данных от Galileo может быть синхронизирована с передачей сигнала данных от GPS, приемное устройство может ассоциировать конкретный передний фронт 304 периодов Galileo в 4,0 мс с конкретным битовым фронтом 306 GPS-сигнала 302 данных. При этом следует заметить, что оценка разности E[L], определенная согласно соотношению (1), например, может использоваться для того, чтобы оценить моменты битовых фронтов 306 с точностью, по меньшей мере, частично на основе точности оценки разности E[L].
Как проиллюстрировано выше, область U неопределенности может быть извлечена из односторонней области неопределенности, определенной согласно соотношению (2). Согласно примеру, дополнительная область U неопределенности может представлять неопределенность, ассоциированную с оценкой разности E[L]. Согласно конкретному примеру по фиг.6А, если такая область U неопределенности составляет меньше, чем односторонняя в 0,5 мс, то фаза и/или совмещение битового фронта, ассоциированного с передним фронтом конкретного периода PRN в 1,0 мс для GPS-сигнала, может быть уникально определена. Если область U неопределенности больше, чем односторонняя в 0,5 мс, то точная фаза и/или совмещение такого битового фронта SV GPS может по-прежнему оставаться несколько неоднозначной. В конкретном примере такая односторонняя неопределенность в оценке разности Е[L] относительно SV1 и SV2 может быть определена согласно соотношению (3) следующим образом:

где с - скорость света;
А1 - оцененный азимутальный угол к SV1 из опорного местоположения;
А2 - оцененный азимутальный угол к SV2 из опорного местоположения;
Е1 - оцененный угол возвышения к SV1 из опорного местоположения;
Е2 - оцененный угол возвышения к SV2 из опорного местоположения; и
Punc - односторонняя неопределенность в опорном местоположении в единицах длины.
Посредством оценки местоположения битового фронта сигнала данных, модулирующего GPS-сигнал, принимаемый в опорном местоположении, как проиллюстрировано выше, принимаемый GPS-сигнал может быть обнаружен с помощью додетекторного интегрирования (PDI) с повышенной чувствительностью. Между битовыми фронтами 306 и 312, например, сигнал данных 302 не изменяется. Соответственно, PDI может быть выполнено с повышенной чувствительностью для части принимаемого GPS-сигнала между оценками битовых фронтов 306 и 312, которые, по меньшей мере, частично основаны на Galileo-сигнале, обнаруженном в области опорного местоположения, как описано выше.
При определении фазы и/или совмещения битового фронта сигнала данных GPS, принимаемого в области опорного местоположения альтернативному признаку, приемное устройство может получить дополнительную информацию из Galileo-сигнала, принимаемого в опорном местоположении, чтобы разрешить дополнительную начальную неопределенность в хронировании принимаемого Galileo-сигнала. В частности, следует заметить, что элементарные посылки в периодически повторяющемся PN-коде в сигнале от SV Galileo могут быть кодированы по Витерби со скоростью 1/2 как "канал передачи данных", где последовательности PN-кода, переданные с периодами в 4,0 мс, кодированы по Витерби или с 1 или 0 для чередующихся периодов в 4,0 мс.
В примере, проиллюстрированном выше, битовый фронт сигнала данных, модулирующего GPS-сигнал, принимаемый в области опорного местоположения, получается из обнаружения Galileo-сигнала в области опорного местоположения и знания хронирования Galileo-сигнала с односторонней неопределенностью, не превышающей 2,0 мс, и односторонней неопределенностью U в оценке разности E[L], не превышающей 0,5 мс. В альтернативном признаке, тем не менее, декодирование по Витерби канала передачи данных Galileo-сигнала, принимаемого в опорном местоположении, может обеспечить обнаружение битового фронта в GPS-сигнале, принимаемом в опорном местоположении, где односторонняя неопределенность, определенная согласно соотношению (2) в хронировании Galileo-сигнала, столь же высока, как 4,0 мс. При этом сигнал данных принимаемого GPS-сигнала синхронизируется с кодированными по Витерби периодами в 4,0 мс Galileo-сигнала. Согласно фиг.6В, поскольку принимаемые GPS- и Galileo-сигналы могут быть синхронизированы, битовый фронт 326 в сигнале 322 данных (принимаемого GPS-сигнала), как может быть известно, синхронизирован с конкретным переходом в коде Витерби принимаемого Galileo-сигнала от 0 к 1, например. Помимо этого, при знании хронирования принимаемого Galileo-сигнала с достаточной точностью приемное устройство может решить, что такой конкретный переход от 0 к 1 находится в пределах области µ неопределенности в 8,0 мс. Соответственно, приемное устройство может в таком случае логически вывести, что этот переход 324 ассоциирован с началом передачи конкретного периода данных от SV Galileo. К тому же такое начало передачи может содержать начало недели, начало кадра данных, начало сегмента данных и т.д. Поскольку передача сигналов данных от Galileo может синхронизироваться с передачей сигнала данных от GPS, приемное устройство может ассоциировать конкретный передний фронт 324 периодов Galileo в 8,0 мс с конкретным битовым фронтом 326 сигнала 322 данных, модулирующего GPS-сигнал посредством оценки разности E[L], и односторонняя неопределенность U в оценке разности E[L] не превышает 0,5 мс. Соответственно, как проиллюстрировано выше, PDI может быть выполнено для части принимаемого GPS-сигнала для обнаружения с повышенной чувствительностью между оценками битовых фронтов 326 и 332, которые, по меньшей мере, частично основаны на Galileo-сигнале, обнаруженном в точке отсчета, как описано выше.
С целью иллюстрации, фиг.6В показывает канал 330 передачи данных кодированного по Витерби канала передачи данных как имеющий значения 1 и 0 в чередующихся периодах в 4,0 мс. Следует понимать, тем не менее, что такие значения не обязательно могут чередоваться для последовательных периодов в 4,0 мс, и что заявленный объект изобретения не ограничен в этом отношении.
В еще одном альтернативном признаке приемное устройство GPS может использовать информацию, извлеченную из контрольного канала Galileo-сигнала, обнаруженного в точке отсчета, в определении фазы и/или совмещения битового фронта GPS-сигнала данных, принимаемого в опорном местоположении. Как проиллюстрировано на фиг.6С, такой контрольный канал 406 из Galileo-сигнала может быть кодирован с помощью известной последовательности данных, которая повторяется для периодов в 100 мс, накладываясь на двадцать пять следующих друг за другом периодов в 4,0 мс повторяющейся последовательности PRN 404. При этом сигнал 402 данных из принимаемого GPS-сигнала может синхронизироваться с контрольным каналом 406. Кроме того, следует заметить, что период в 100 мс контрольного канала 406, принимаемого в точке отсчета, может быть ассоциирован с пятью следующими друг за другом периодами в 20 мс сигнала 402 данных. Определение односторонней неопределенности согласно соотношению (2) в хронировании принимаемого Galileo-сигнала как меньше, чем 50 мс (или области неопределенности меньше, чем 100 мс) обеспечивает ассоциирование момента в периоде в 100 мс декодированного контрольного канала с началом передачи конкретного периода данных от SV Galileo, такого как начало передачи в начале недели, начало кадра данных, начало сегмента данных и т.д. Поскольку передача контрольного канала 406 может синхронизироваться с передачей сигнала 402 данных, приемное устройство может ассоциировать конкретный передний фронт 408 периодов в 100,0 мс контрольного канала 406 с конкретным битовым фронтом 412 в сигнале 402 данных из принимаемого GPS-сигнала. Соответственно, известный момент в периоде в 100 мс обнаруженного контрольного канала в принимаемом Galileo-сигнале может быть ассоциирован с битовым фронтом принимаемого GPS-сигнала посредством оценки разности E[L], определенной согласно соотношению (1), и односторонняя неопределенность U в оценке разности E[L] не превышает 0,5 мс. К тому же с определением битового фронта в принимаемом GPS-сигнале, PDI может быть выполнено для части принимаемого GPS-сигнала для обнаружения GPS-сигнала с повышенной чувствительностью между оценками битовых фронтов.
Согласно примеру, хотя заявленный объект изобретения не ограничен в этом отношении, обнаружение битового фронта в GPS-сигнале, принимаемом в опорном местоположении, может использоваться для того, чтобы определить границы кодирования по Витерби Galileo-сигнала, принимаемого в опорном местоположении. Как проиллюстрировано выше, конкретный битовый фронт в сигнале данных принимаемого GPS-сигнала, как может быть известно, синхронизирован с переходом в коде Витерби принимаемого Galileo-сигнала от 0 к 1 или синхронизирован, например, с переходом от 1 к 0. По сути, с односторонней неопределенностью, определенной согласно соотношению (2) в хронировании принимаемого GPS-сигнала меньше, чем 10 мс, следует заметить, что конкретный обнаруженный битовый фронт в сигнале данных принимаемого GPS-сигнала может быть ассоциирован с таким переходом (граница декодирования по Витерби) в канале передачи данных принимаемого Galileo-сигнала посредством оценки разности Е[L], определенной согласно вышеприведенному соотношению (1), если неопределенность разности в оценке E[L] от SV GPS к SV Galileo составляет меньше, чем 2,0 мс. Неопределенность разности определяется согласно вышеприведенному соотношению (3). Как проиллюстрировано на фиг.6D, например, с односторонней неопределенностью в хронировании принимаемого GPS-сигнала меньше, чем 10 мс, обнаружение битового фронта 476 в сигнале 472 данных, модулирующем GPS-сигнал 482, принимаемый в опорном местоположении, предоставляет точную привязку по времени к кодированному по Витерби Galileo-сигналу 478, принимаемому в опорном местоположении. С двусторонней неопределенностью µ меньше, чем 4,0 мс, как показано, соответственно, может быть уникально определен переход в границе 484 кодирования по Витерби в Galileo-сигнале 478.
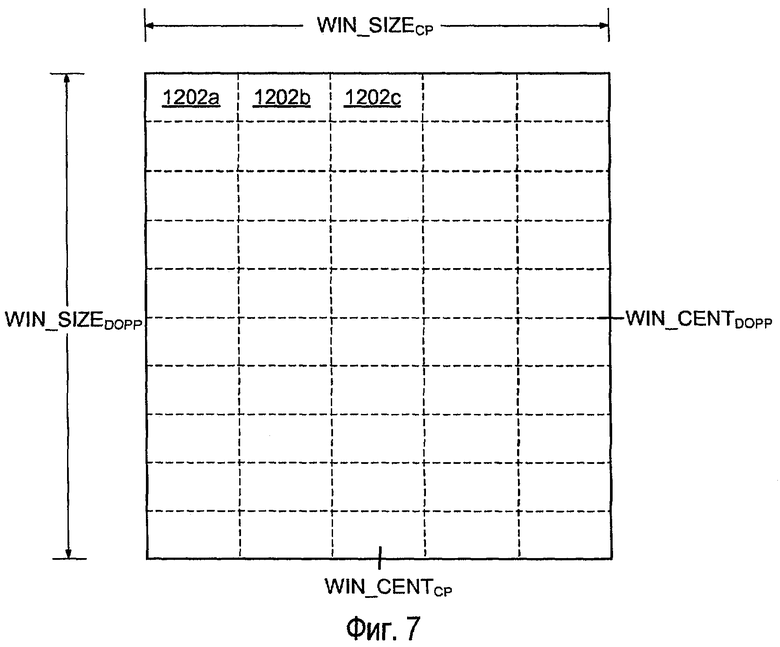
Согласно примеру, SV, видимый в приемном устройстве (к примеру, как указано в сообщении АА), может быть ассоциирован с определенным набором параметров окна поиска, задающих двумерную область гипотез фазы кода и доплеровской частоты, в которых должен быть выполнен поиск на предмет SV. В одной реализации, проиллюстрированной на фиг.7, параметры окна поиска для SV содержат размер окна поиска фазы кода, WIN_SIZECP, центр окна фазы кода, WIN_CENTCP, размер окна поиска Доплера, WTN_SIZEDOPP, и центр окна Доплера, WlN_CENTDOPP. В случае, если объект, позиция которого отыскивается для определения, является абонентской станцией в совместимой с 1S-801 системе беспроводной связи, эти параметры могут быть указаны в соответствии с сообщением АА, предоставляемым в абонентскую станцию посредством PDE.
Двумерная область поиска для SV, проиллюстрированная на фиг.7, показывает, что ось фазы кода - это горизонтальная ось, а ось доплеровской частоты - это вертикальная ось, но эта компоновка произвольна и может быть изменена на противоположную. Центр окна поиска фазы кода упоминается как WIN_CENTCP, а размер окна поиска фазы кода упоминается как WIN_SIZECP. Центр окна поиска доплеровской частоты упоминается как WIN_CENTDOPP, а размер окна поиска доплеровской частоты упоминается как WIN_SIZEDOPP.
После обнаружения первого сигнала из первого SV, согласно примеру, WIN_CENTCP и WTN_SIZECP для обнаружения второго сигнала от второго SV могут быть определены, по меньшей мере, частично на основе фазы кода, обнаруженной в первом обнаруженном сигнале оценки местоположения приемного устройства и информации, описывающей местоположения для первых и вторых SV в течение конкретного времени t. При этом область поиска для обнаружения второго сигнала может быть разделена на множество сегментов 1202а, 1202b, 1202с, каждый из которых характеризуется диапазоном доплеровских частот и диапазоном фаз кода.
Согласно примеру, диапазон фаз кода, характеризующих сегмент, может быть равен пропускной способности канала коррелятора для поиска сегмента за одно прохождение канала. В одном конкретном примере, где пропускная способность канала связи составляет, например, тридцать две элементарных посылки, диапазон фаз кода, характеризующих сегмент, может быть аналогично равен тридцати двум элементарным посылкам, но понятно, что возможны и другие примеры.
Сегменты могут накладываться на назначенное число элементарных посылок, чтобы избежать пропущенных пиков, которые появляются на границах сегмента, как проиллюстрировано на фиг.8. При этом заключительная часть сегмента 1202а перекрывает начальную часть сегмента 1202b на Δ элементарных посылках, а заключительная часть сегмента 1202b аналогично перекрывает начальную часть сегмента 1202с на Δ элементарных посылках. Вследствие дополнительной служебной информации, обусловленной этим перекрытием, фактический диапазон фаз кода, представленных сегментом, может быть меньше, чем пропускная способность канала. В случае, если перекрытие составляет, например, четыре элементарных посылки, фактический диапазон фаз кода представленных сегментом, может равняться двадцати восьми элементарным посылкам.
Система для обнаружения периодически повторяющихся сигналов от SV проиллюстрирована на фиг.9 согласно конкретному примеру. Тем не менее, это просто пример системы, которая допускает обнаружение таких сигналов согласно конкретному примеру, и другие системы могут использоваться без отклонения от заявленного предмета изобретения. Как проиллюстрировано на фиг.9, согласно конкретному примеру такая система может содержать вычислительную платформу, включающую в себя процессор 1302, запоминающее устройство 1304 и коррелятор 1306. Коррелятор 1306 может быть выполнен с возможностью формировать корреляционные функции из сигналов, предоставляемых посредством приемного устройства (не показано), которые должны быть обработаны посредством процессора 1302 или непосредственно, или через запоминающее устройство 1304. Коррелятор 1306 может быть реализован в аппаратных средствах, программном обеспечении или комбинации аппаратных средств и программного обеспечения. Тем не менее, это просто примеры того, как коррелятор может быть реализован согласно конкретным аспектам, и заявленный объект изобретения не ограничен в этих отношениях.
Согласно примеру, запоминающее устройство 1304 может сохранять машиночитаемые инструкции, которые доступны и выполнимы посредством процессора 1302, чтобы предоставить, по меньшей мере, часть вычислительной платформы. При этом процессор 1302 в комбинации с такими машиночитаемыми инструкциями может быть выполнен с возможностью выполнять все или части процесса 200, проиллюстрированного выше в отношении фиг.3. В конкретном примере, хотя заявленный объект изобретения не ограничен в этих отношениях, процессор 1302 может направлять коррелятор 1306 так, чтобы выполнять поиск сигналов определения местоположения, как проиллюстрировано выше, и извлекать измерения из корреляционных функций, формируемых коррелятором 1306.
Согласно фиг.10, приемо-передающее радиоустройство 1406 может быть выполнено с возможностью модулировать несущий сигнал RF информацией базовой полосы, такой как голос или данные, на несущей RF-частоте, и демодулировать модулированную несущую RF-частоту, чтобы получить эту информацию базовой полосы. Антенна 1410 может быть выполнена с возможностью передавать модулированную несущую RF-частоту по линии беспроводной связи и принимать модулированную несущую RF-частоту по линии беспроводной связи.
Процессор 1408 базовой полосы может быть выполнен с возможностью предоставлять информацию базовой полосы из CPU 1402 в приемо-передающее устройство 1406 для передачи по линии беспроводной связи. При этом CPU 1402 может получать эту информацию базовой полосы из устройства ввода данных в пределах пользовательского интерфейса 1416. Процессор 1408 базовой полосы также может быть выполнен с возможностью предоставлять информацию базовой полосы из приемо-передающего устройства 1406 в CPU 1402 для передачи через устройство вывода в пределах пользовательского интерфейса 1416.
Пользовательский интерфейс 1416 может содержать множество устройств для ввода или вывода пользовательской информации, такой как голос или данные. Такие устройства могут включать в себя, например, клавиатуру, экран дисплея, микрофон и динамик.
Приемное устройство SPS (SPS Rx) 1412 может быть выполнено с возможностью принимать и демодулировать передачи от SV и предоставлять демодулированную информацию в коррелятор 1418. Коррелятор 1418 может быть выполнен с возможностью извлекать корреляционные функции из информации, предоставленной посредством приемного устройства 1412. Для данного PN-кода, например, коррелятор 1418 может формировать корреляционную функцию, заданную для диапазона фаз кода, чтобы представить окно поиска фазы кода, и для диапазона гипотез доплеровской частоты, как проиллюстрировано выше. По сути, отдельная корреляция может быть выполнена в соответствии с заданными параметрами когерентного и некогерентного интегрирования.
Коррелятор 1418 также может быть выполнен с возможностью извлекать связанные с контрольным сигналом корреляционные функции из информации, связанной с контрольными сигналами, предоставляемыми посредством приемо-передающего устройства 1406. Эта информация может использоваться посредством абонентской станции для того, чтобы получать услуги беспроводной связи.
Канальный декодер 1420 может быть выполнен с возможностью декодировать канальные символы, принимаемые из процессора 1408 базовой полосы, в соответствующие исходные биты. В одном примере, где канальные символы содержат сверточно-кодированные символы, такой канальный декодер может содержать декодер Витерби. Во втором примере, где канальные символы содержат последовательные или параллельные конкатенации сверточных кодов, канальный декодер 1420 может содержать турбодекодер.
Запоминающее устройство 1404 может быть выполнено с возможностью сохранять машиночитаемые инструкции, которые приводятся в исполнение так, чтобы выполнить один или более процессов, примеров, реализации или их примеров, которые описаны или предложены. CPU 1402 может быть выполнен с возможностью осуществлять доступ и приводить в исполнение эти машиночитаемые инструкции. Посредством выполнения этих машиночитаемых инструкций CPU 1402 может предписывать коррелятору 1418 осуществлять поиск, используя конкретные режимы поиска на этапах 202 и 204, анализировать корреляционные функции GPS, предоставляемые посредством коррелятора 1418, извлекать измерения из их пиков и определять, достаточно точна ли оценка местоположения. Тем не менее, это просто примеры задач, которые могут быть выполнены посредством CPU в конкретном аспекте, и заявленный объект изобретения не ограничен в этих отношениях.
В конкретном примере CPU 1402 в абонентской станции может оценивать местоположение абонентской станции, по меньшей мере, частично на основе сигналов, принимаемых от SV, как проиллюстрировано выше. CPU 1402 также может быть выполнен с возможностью определять диапазон поиска кода для обнаружения второго принимаемого сигнала, по меньшей мере, частично на основе фазы кода, обнаруженного в первых принимаемых сигналах, как проиллюстрировано выше согласно конкретным примерам. Следует понимать, тем не менее, что это просто примеры систем для оценки местоположения, по меньшей мере, частично на основе измерений псевдодальности, определения количественных оценок таких измерений псевдодальности и завершения процесса, чтобы повысить точность измерений псевдодальности, согласно конкретным аспектам, и что заявленный объект изобретения не ограничен в этих отношениях.
Хотя в настоящем документе было проиллюстрировано и пояснено то, что в настоящее время рассматривается в качестве примерных признаков, специалисты в данной области техники должны понимать, что различные другие модификации могут быть выполнены и эквиваленты могут быть заменены без отступления от заявленного объекта изобретения. Дополнительно множество модификаций может быть выполнено для того, чтобы адаптировать конкретную ситуацию к идеям заявленного объекта изобретения без отступления от основного принципа, описанного в данном изобретении. Следовательно, подразумевается, что заявленный объект изобретения не ограничен конкретными раскрытыми примерами, а этот заявленный объект изобретения также может включать в себя все аспекты, попадающие в объем прилагаемой формулы изобретения и ее эквивалентов.







Изобретение относится к определению местоположения на основе сигналов, принимаемых от геолокационных спутников. Техническим результатом является разрешение неоднозначностей гипотез псевдодальности, ассоциированных с обнаруженными сигналами глобальной навигационной спутниковой системы (GNSS) и снижение вычислительной сложность такой обработки. Указанный технический результат достигается тем, что ассоциируют первые гипотезы псевдодальности, выведенные из первого сигнала, полученного от первого космического аппарата (SV) в опорном местоположении, с одной или более вторых гипотез псевдодальности, выведенных из второго сигнала, принятого от упомянутого второго SV в упомянутом опорном местоположении, причем упомянутое ассоциирование основано, по меньшей мере, частично на оцененной разности между первой дальностью до упомянутого первого SV из упомянутого опорного местоположения и второй дальностью до второго SV из упомянутого опорного местоположения; и уменьшают неоднозначность фазы битового фронта сигнала данных, модулирующего упомянутый первый сигнал, по меньшей мере, частично на основе упомянутых ассоциированных первых гипотез псевдодальности. 12 н. и 19 з.п. ф-лы, 15 ил.
1. Способ измерения псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащий этапы, на которых:
ассоциируют первые гипотезы псевдодальности, выведенные из первого сигнала, полученного от первого космического аппарата (SV) в опорном местоположении, с одной или более вторыми гипотезами псевдодальности, выведенными из второго сигнала, принятого от второго SV в упомянутом опорном местоположении, причем упомянутое ассоциирование основано, по меньшей мере, частично на оцененной разности между первой дальностью до упомянутого первого SV из упомянутого опорного местоположения и второй дальностью до упомянутого второго SV из упомянутого опорного местоположения; и
уменьшают неоднозначность фазы битового фронта сигнала данных, модулирующего упомянутый первый сигнал, по меньшей мере, частично на основе упомянутых ассоциированных первых гипотез псевдодальности, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
2. Способ по п.1, дополнительно содержащий этап, на котором определяют упомянутую оцененную разность, по меньшей мере, частично на основе местоположений упомянутых первого и второго SV.
3. Способ по п.2, дополнительно содержащий этап, на котором принимают информацию, указывающую местоположения упомянутых первого и второго SV, полученную из сообщения помощи в обнаружении.
4. Способ по п.1, в котором упомянутый второй сигнал кодируют с использованием повторяющейся последовательности данных, и при этом упомянутый способ дополнительно содержит этапы, на которых: декодируют упомянутую повторяющуюся последовательность данных из, по меньшей мере, части упомянутого второго сигнала; и исключают, по меньшей мере, некоторые из упомянутых вторых гипотез псевдодальности, по меньшей мере, частично на основе упомянутой декодированной последовательности данных.
5. Способ по п.4, в котором упомянутое уменьшение упомянутой неоднозначности дополнительно содержит этап, на котором; ограничивают упомянутые ассоциированные первые гипотезы псевдодальности первыми гипотезами псевдодальности, ассоциированными с любыми оставшимися вторыми гипотезами псевдодальности после упомянутого исключения.
6. Способ по п.1, в котором упомянутый второй сигнал кодируют с использованием известной последовательности данных, и при этом упомянутый способ дополнительно содержит этап, на котором: обнаруживают фазовое совмещение упомянутой известной последовательности данных относительно истинной псевдодальности до упомянутого второго SV, и при этом упомянутое ассоциирование дополнительно содержит ассоциирование упомянутой истинной псевдодальности до упомянутого второго SV с упомянутыми первыми гипотезами псевдодальности.
7. Способ по п.1, в котором упомянутый первый SV представляет собой спутник в группировке GPS, а упомянутый второй SV представляет собой спутник в группировке Galileo.
8. Способ измерения псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащий этапы, на которых:
определяют множество первых гипотез псевдодальности до первого космического аппарата (SV) из опорного местоположения, по меньшей мере, частично на основе фазы первого кода, обнаруженной в первом сигнале, принятом в упомянутом опорном местоположении, причем упомянутый первый сигнал модулируется сигналом данных; и
уменьшают неоднозначность, ассоциированную с истинной псевдодальностью среди упомянутых первых гипотез псевдодальности относительно упомянутого сигнала данных, основываясь, по меньшей мере, частично на фазе второго кода, обнаруженной во втором сигнале, принятом от второго SV в упомянутом опорном местоположении, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
9. Способ по п.8, в котором упомянутый второй сигнал кодируют с использованием периодически повторяющейся случайной кодовой последовательности, и при этом упомянутое уменьшение упомянутой неоднозначности дополнительно содержит этапы, на которых: определяют одну или более вторых гипотез псевдодальности до упомянутого второго SV из упомянутого опорного местоположения, основываясь, по меньшей мере, частично на упомянутой фазе второго кода; и ассоциируют упомянутые первые гипотезы с упомянутыми вторыми гипотезами.
10. Способ по п.9, в котором упомянутое ассоциирование упомянутых первых гипотез с упомянутыми вторыми гипотезами дополнительно содержит ассоциирование упомянутых первых гипотез с упомянутыми вторыми гипотезами, по меньшей мере, частично на основе оценки разности между дальностью до упомянутого первого SV из упомянутого опорного местоположения и дальностью до упомянутого второго SV из упомянутого опорного местоположения.
11. Способ по п.10, в котором упомянутое оценивание основано, по меньшей мере, частично на местоположениях упомянутых SV.
12. Способ по п.9, в котором упомянутый второй сигнал модулируют информацией, и в котором упомянутое уменьшение упомянутой неоднозначности дополнительно содержит исключение упомянутых вторых гипотез псевдодальности, по меньшей мере, частично на основе упомянутой информации.
13. Способ по п.12, в котором упомянутая информация содержит периодически повторяющуюся последовательность данных.
14. Способ по п.13, в котором упомянутая информация содержит контрольный канал Galileo.
15. Способ по п.8, в котором упомянутый первый сигнал передается согласно первой глобальной спутниковой навигационной системе (GNSS), и второй сигнал передается согласно второй GNSS, отличной от упомянутой первой GNSS.
16. Способ по п.15, в котором упомянутый первый SV находится в группировке GPS, а упомянутый второй SV находится в группировке Galileo.
17. Способ измерения псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащий этапы, на которых:
принимают первый сигнал космического аппарата (SV) из первой спутниковой системы определения местоположения; и
уменьшают неоднозначность битового фронта сигнала данных, модулирующего второй сигнал SV, принятый из второй спутниковой системы определения местоположения, основываясь, по меньшей мере, частично на информации в упомянутом принятом первом сигнале SV, причем упомянутый первый сигнал SV передается в соответствии с первым форматом, и упомянутый второй сигнал SV передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
18. Способ по п.17, в котором упомянутая информация содержит фазу кода, обнаруженную в упомянутом первом сигнале SV.
19. Способ по п.18, в котором упомянутое уменьшение упомянутой неоднозначности битового фронта дополнительно содержит этапы, на которых:
определяют одну или более первых гипотез псевдодальности, основываясь, по меньшей мере, частично на упомянутой фазе кода; и ассоциируют упомянутые одну или более первых гипотез псевдодальности со множеством вторых гипотез псевдодальности, ассоциированных с упомянутым вторым сигналом SV.
20. Устройство для использования в измерении псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащее:
носитель хранения данных, причем упомянутый носитель хранения данных содержит сохраненные на нем машиночитаемые инструкции, которые приспособлены при исполнении компьютерной платформой, чтобы побуждать упомянутую компьютерную платформу:
ассоциировать первые гипотезы псевдодальности, выведенные из первого сигнала, получаемого от первого космического аппарата (SV) в опорном местоположении, с одной или более вторыми гипотезами псевдодальности, выведенными из второго сигнала, принимаемого от второго SV в упомянутом опорном местоположении, причем упомянутое ассоциирование между упомянутыми первыми и вторыми гипотезами псевдодальности основано, по меньшей мере, частично на оцененной разности между первой дальностью до упомянутого первого SV из упомянутого опорного местоположения и второй дальностью до второго SV из упомянутого опорного местоположения; и
уменьшать неоднозначность фазы битового фронта сигнала данных, модулирующего упомянутый первый сигнал, по меньшей мере, частично на основе упомянутых ассоциированных первых гипотез псевдодальности, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
21. Устройство для использования в измерении псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащее:
носитель хранения данных, причем упомянутый носитель хранения данных содержит сохраненные на нем машиночитаемые инструкции, которые приспособлены при исполнении компьютерной платформой, чтобы побуждать упомянутую компьютерную платформу:
определять множество первых гипотез псевдодальности до первого космического аппарата (SV) из опорного местоположения, основываясь, по меньшей мере, частично на фазе первого кода, обнаруженной в первом сигнале, принятом в упомянутом опорном местоположении, причем упомянутый первый сигнал модулирован сигналом данных; и
уменьшать неоднозначность, ассоциированную с истинной псевдодальностью среди упомянутых первых гипотез псевдодальности относительно упомянутого сигнала данных, основываясь, по меньшей мере, частично на фазе второго кода, обнаруженной во втором сигнале, принятом от второго SV в упомянутом опорном местоположении, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
22. Устройство для использования в измерении псевдодальности с использованием сигналов спутниковой системы определения местоположения (SPS), содержащее:
носитель хранения данных, причем упомянутый носитель хранения данных содержит сохраненные на нем машиночитаемые инструкции, которые приспособлены при исполнении компьютерной платформой, чтобы побуждать упомянутую компьютерную платформу:
получать информацию, по меньшей мере, частично на основе первого сигнала космического аппарата (SV), принимаемого от первой спутниковой системы определения местоположения; и
уменьшать неоднозначность битового фронта сигнала данных, модулирующего второй сигнал SV, принимаемый из второй спутниковой системы определения местоположения, по меньшей мере, частично на основе информации в упомянутом принятом первом сигнале SV, причем упомянутый первый сигнал SV передается в соответствии с первым форматом, и упомянутый второй сигнал SV передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
23. Абонентское устройство определения местоположения, содержащее:
приемное устройство для приема сообщения помощи в обнаружении (АА), содержащего информацию, указывающую местоположения первого и второго космических аппаратов (SV); и
процессор, имеющий возможность доступа к упомянутой информации, указывающей упомянутые местоположения, и выполненный с возможностью:
оценивать разность между первой дальностью до упомянутого первого SV из опорного местоположения и второй дальностью до упомянутого второго SV из упомянутого опорного местоположения, по меньшей мере, частично на основе упомянутой информации;
ассоциировать, по меньшей мере, частично на основе упомянутой оцененной разности первые гипотезы псевдодальности, выведенные из первого сигнала, полученного от упомянутого первого SV в опорном местоположении, с одной или более вторыми гипотезами псевдодальности, выведенными из второго сигнала, полученного от упомянутого второго SV в упомянутом опорном местоположении; и
уменьшать неоднозначность фазы битового фронта сигнала данных, модулирующего упомянутый первый сигнал, по меньшей мере, частично на основе упомянутых ассоциированных первых гипотез псевдодальности, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
24. Абонентское устройство определения местоположения по п.23, в котором упомянутое приемное устройство выполнено с возможностью принимать упомянутое сообщение АА по наземной линии беспроводной связи.
25. Абонентское устройство определения местоположения, содержащее:
приемное устройство для приема сообщения помощи в обнаружении (АА), содержащего информацию, указывающую местоположения первого и второго космических аппаратов (SV); и
процессор, имеющий возможность доступа к упомянутой информации, указывающей упомянутые местоположения, и выполненный с возможностью:
определять множество первых гипотез псевдодальности,
основываясь, по меньшей мере, частично на фазе первого кода, обнаруженной в упомянутом первом сигнале, причем упомянутый первый сигнал модулирован сигналом данных; и
уменьшать неоднозначность, ассоциированную с истинной псевдодальностью среди упомянутых первых гипотез псевдодальности относительно упомянутого сигнала данных, основываясь, по меньшей мере, частично на упомянутой информации и фазе второго кода, обнаруженной в упомянутом втором сигнале, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
26. Абонентское устройство определения местоположения по п.25, в котором упомянутое приемное устройство выполнено с возможностью принимать упомянутое сообщение АА по наземной линии беспроводной связи.
27. Абонентское устройство определения местоположения, содержащее:
приемное устройство для приема сообщения помощи в обнаружении (АА), содержащего информацию, указывающую местоположения первого и второго космических аппаратов (SV); и
процессор, имеющий возможность доступа к упомянутой информации, указывающей упомянутые местоположения, выполненный с возможностью
принимать первый и второй сигналы первого и второго SV; и
уменьшать неоднозначность битового фронта сигнала данных, модулирующего упомянутый второй принятый сигнал SV, по меньшей мере, частично на основе информации в упомянутом принятом первом сигнале SV и упомянутой информации, указывающей упомянутые местоположения, причем упомянутый принятый первый сигнал передается в соответствии с первым форматом, и упомянутый принятый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
28. Абонентское устройство определения местоположения по п.27, в котором упомянутое приемное устройство выполнено с возможностью принимать упомянутое сообщение АА по наземной линии беспроводной связи.
29. Система определения местоположения, содержащая:
объект определения местоположения (PDE); и
абонентское устройство, причем абонентское устройство выполнено с возможностью:
принимать сообщение помощи в обнаружении (АА) от упомянутого PDE по наземной линии беспроводной связи, причем упомянутое сообщение АА содержит информацию, указывающую местоположения первого и второго космических аппаратов (SV);
оценивать разность между первой дальностью из опорного местоположения до упомянутого первого SV и второй дальностью из упомянутого опорного местоположения до упомянутого второго SV, по меньшей мере, частично на основе упомянутой информации;
ассоциировать, по меньшей мере, частично на основе упомянутой оцененной разности первые гипотезы псевдодальности, выведенные из первого сигнала, полученного от упомянутого первого SV в опорном местоположении, с одной или более вторыми гипотезами псевдодальности, выведенными из второго сигнала, принятого от упомянутого второго SV в упомянутом опорном местоположении; и
уменьшать неоднозначность совмещения истинной псевдодальности до упомянутого первого SV относительно битового фронта сигнала данных, модулирующего упомянутый первый сигнал, по меньшей мере, частично на основе упомянутых ассоциированных первых гипотез псевдодальности, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
30. Система определения местоположения, содержащая:
объект определения местоположения (PDE); и
абонентское устройство, причем абонентское устройство выполнено с возможностью:
принимать сообщение помощи в обнаружении (АА) от упомянутого PDE по наземной линии беспроводной связи, причем упомянутое сообщение АА содержит информацию, указывающую местоположения первого и второго космических аппаратов (SV);
определять множество первых гипотез псевдодальности до упомянутого первого космического аппарата (SV) из опорного местоположения, основываясь, по меньшей мере, частично на фазе первого кода, обнаруженной в первом сигнале, принятом в упомянутом опорном местоположении, причем упомянутый первый сигнал модулирован сигналом данных; и
уменьшать неоднозначность, ассоциированную с совмещением истинной псевдодальности среди упомянутых первых гипотез псевдодальности относительно упомянутого сигнала данных, основываясь, по меньшей мере, частично на фазе второго кода,
обнаруженной во втором сигнале, принятом от второго SV в упомянутом опорном местоположении, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
31. Система определения местоположения, содержащая:
объект определения местоположения (PDE); и
абонентское устройство, причем абонентское устройство выполнено с возможностью:
принимать сообщение помощи в обнаружении (АА) от упомянутого PDE по наземной линии беспроводной связи, причем упомянутое сообщение АА содержит информацию, указывающую местоположения первого и второго космических аппаратов (SV), при этом упомянутый первый SV принадлежит первой спутниковой системе определения местоположения (SPS), а второй SV принадлежит второй SPS;
принимать первый сигнал SV от упомянутого первого SV и второй сигнал SV от упомянутого второго SV; и
уменьшать неоднозначность битового фронта сигнала данных, модулирующего упомянутый второй принятый сигнал SV, по меньшей мере, частично на основе информации в упомянутом принятом первом сигнале SV и упомянутой информации, указывающей упомянутые местоположения упомянутых первого и второго SV, причем упомянутый первый сигнал передается в соответствии с первым форматом, и упомянутый второй сигнал передается в соответствии со вторым форматом, отличающимся от упомянутого первого формата.
| WO 2004063763 A1, 2004.07.29 | |||
| WO 9944073 A1, 1999.09.02 | |||
| 0 |
|
SU153849A1 | |
| EP 1146349 A2, 2001.10.17 | |||
| Пневматический прибор для шабровочных работ | 1936 |
|
SU49737A1 |
| WO 2005071432 A1, 2005.08.04 | |||
| СИСТЕМЫ И СПОСОБЫ ДЛЯ РАЗРЕШЕНИЯ НЕОДНОЗНАЧНОСТИ ПО ПСЕВДОДАЛЬНОСТИ ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ (ГСП) | 2000 |
|
RU2253127C2 |
| US 2006140254 A1, 2006.06.29 | |||
| US 6266009 В1, 2001.07.24 | |||
| US 5825328 А 1998.10.20 | |||
| US 6133874 А, 2000.10.17 | |||
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| NESREEN I | |||
| ZIEDAN, | |||

