Изобретение относится к контейнерному трубопроводному пневмотранспорту и используется для оптимизации трасс доставки транспортных контейнеров путем автоматического перевода движения груженых контейнеров по одному из двух (или четырех) периферийных транспортных трубопроводов в один центральный транспортный трубопровод и возврата порожних контейнеров, перемещающихся по центральному транспортному трубопроводу, в соответствующий периферийный транспортный трубопровод.
Известна установка для пневматического транспортирования контейнеров по трубопроводу, использующая для оптимизации трасс транспортных трубопроводов стрелочный перевод, соединяющий все устройства автоматической загрузки транспортных контейнеров с устройством их автоматической разгрузки (см. патент РФ №2576462, МПК2014.01 B65G 51/04, опубл. 10.03.2016 г.)
Недостатком конструктивного решения стрелочного перевода, используемого в данной установке, является большое количество исполнительных механизмов, сигналов управления и сложный алгоритм управления работой стрелочного перевода, что снижает надежность его функционирования и установки в целом.
Наиболее близким к заявляемому техническому решению является автоматический стрелочный перевод контейнерного пневмотранспорта, содержащий передвижные каретки с приемными стаканами, пневмоцилиндры для горизонтальных перемещений передвижных кареток, узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха, электропневматические переключатели для управления работой пневмоцилиндров и электропневматические клапаны для управления подачи транспортирующего сжатого воздуха, (см. «Автоматические стрелочные переводы направления движения транспортных контейнеров». Лобоцкий Ю.Г., Хмара В.В., журнал: «Устойчивое развитие горных территорий», 2014 г. №4, с. 27-35).
Недостатками прототипа является: сложность конструкции стрелочного перевода, использующая большое количество исполнительных механизмов, т.к. осуществляет две функции: перевод перемещения транспортных контейнеров из нескольких транспортных трубопроводов в один транспортный трубопровод и перевод движения транспортных контейнеров из одного транспортного трубопровода в несколько транспортных трубопроводов, используя три узла для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха, а также сложность алгоритма управления работой стрелочного перевода, что значительно снижают общую надежность функционирования, как самого автоматического стрелочного перевода, так и всей системы контейнерного пневмотранспорта.
Техническим результатом предлагаемого решения является упрощение конструкции и повышение эксплуатационной надежности и, соответственно, всей системы трубопроводного контейнерного пневмотранспорта.
Решение технического результата достигается тем, что в автоматическом стрелочном переводе контейнерного пневмотранспорта, содержащим передвижные каретки с приемными стаканами, пневмоцилиндры для горизонтальных перемещений передвижных кареток, узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха, причем для управления работой автоматического стрелочного перевода на транспортных трубопроводах установлены датчики приема и отправки транспортных контейнеров, а датчики их положения установлены на всех пневмоцилиндрах, согласно изобретению, узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха установлены на передвижных каретках.
Данное техническое решение позволит упростить конструкцию и повысить эксплуатационную надежность автоматического стрелочного перевода и системы трубопроводного контейнерного пневмотранспорта в целом, за счет установки двух узлов, вместо трех, на передвижных каретках для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха.
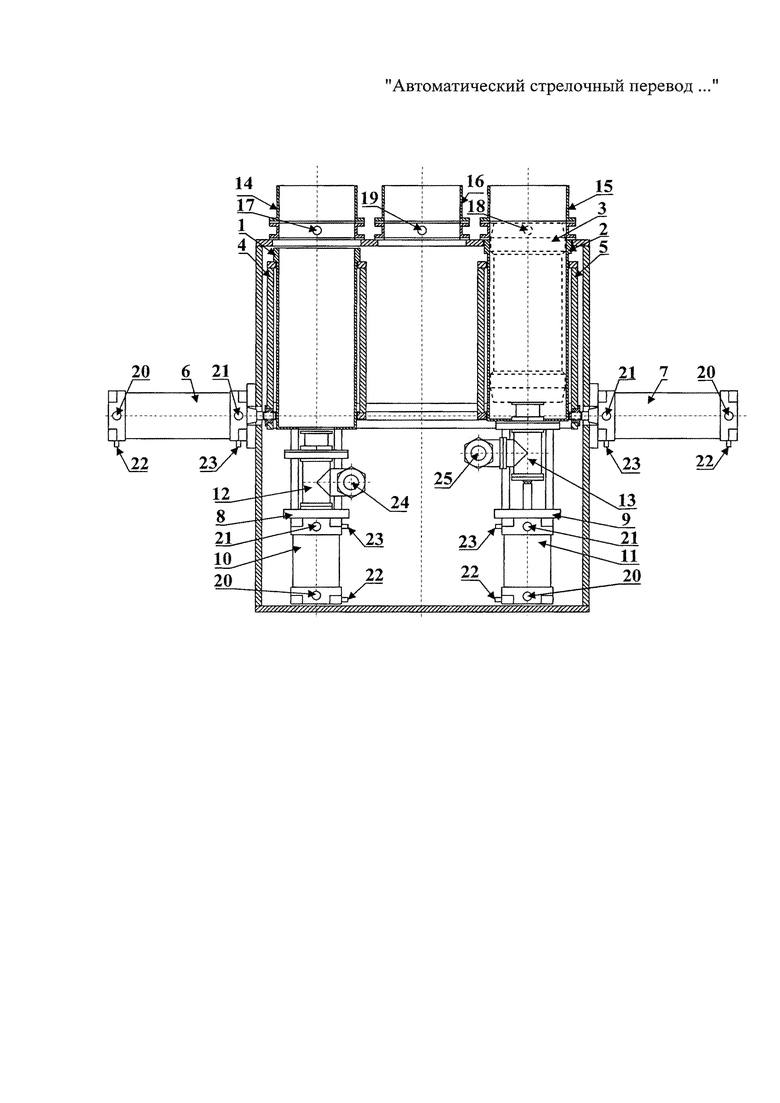
Сущность изобретения поясняется фигурой, на которой изображена общая схема автоматического стрелочного перевода контейнерного пневмотранспорта.
Автоматический стрелочный перевод содержит два приемных стакана 1, 2, для приема и отправки к месту назначения груженых и порожних транспортных контейнеров 3 (на фиг. указан пунктиром). Приемные стаканы 1, 2 установлены в передвижные каретки 4 и 5, которые соединены с пневмоцилиндрами 6 и 7. К передвижным кареткам 4, 5 присоединены узлы для вертикального перемещения приемных стаканов 1, 2 и узлы подачи транспортирующего сжатого воздуха 8 и 9, которые состоят из пневмоцилиндров 10 и 11 и узлов подачи транспортирующего сжатого воздуха 12 и 13. Транспортный трубопровод 14, 15 и 16 служит для приема и отправки груженых или порожних транспортных контейнеров 3. Для управления работой автоматического стрелочного перевода на транспортных трубопроводах 14, 15 и 16 установлены датчики 17, 18 и 19 приема и отправки груженых или порожних транспортных контейнеров 3 и датчики их положения 20, 21, которые установлены на всех пневмоцилиндрах 6, 7 и 10, 11. На торцах пневмоцилиндров 6, 7 и 10, 11 расположены штуцеры 22 и 23 для подачи управляющего сжатого воздуха, а на двух узлах подачи транспортирующего сжатого воздуха 12, 13 расположены штуцеры 24, 25.
Автоматический стрелочный перевод контейнерного пневмотранспорта работает следующим образом.
В исходном положении передвижные каретки 4 и 5 находятся в крайних положениях, приемные стаканы 1 и 2 подняты и обеспечивают герметизацию выходов периферийных транспортных трубопроводов 14 и 15.
При доставке груженого транспортного контейнера 3 по одному из периферийных транспортных трубопроводов, например 15, срабатывает датчик 18, по сигналу которого отключается подача транспортирующего сжатого воздуха и в штуцер 23 пневмоцилиндра 11 поступает сжатый воздух, при этом приемный стакан 2 опускается с прибывшим груженым транспортным контейнером 3.
При поступлении информационного сигнала от датчика 20 пневмоцилиндра 11 о завершении вертикального перемещения приемного стакана 2 с прибывшим груженым транспортным контейнером 3 в пневмоцилиндр 7 через штуцер 22 подается сжатый воздух для горизонтального перемещения приемного стакана 2 с прибывшим груженым транспортным контейнером 3 под центральный транспортный трубопровод 16.
При поступлении информационного сигнала от датчика 21 пневмоцилиндра 7 о завершении горизонтального перемещения приемного стакана 2 с прибывшим груженым транспортным контейнером подается через штуцер 22 пневмоцилиндра 11 сжатый воздух для вертикального перемещения приемного стакана 2 с прибывшим груженым транспортным контейнером 3 для герметизации центрального транспортного трубопровода 16. После получения информационного сигнала с датчика 21 от пневмоцилидра 11 о завершении вертикального перемещения через штуцер 25 узла 9 подается транспортирующий сжатый воздух.
После получения информационного сигнала о прибытии груженого транспортного контейнера 3 отключают подачу транспортирующего сжатого воздуха, а система микропроцессорного управления автоматическим стрелочным переводом (на фигуре не показана) переводится в режим ожидания возвращения порожнего транспортного контейнера 3 после его разгрузки.
При поступлении информационного сигнала от датчика 19 на пневмоцилиндр 11 через штуцер 23 подается сжатый воздух для опускания узла подачи транспортирующего сжатого воздуха 13.
После получения от датчика 20 пневмоцилиндра 11 информационного сигнала на пневмоцилиндр 7, через штуцер 23 подается сжатый воздух и передвижная каретка 5 с приемным стаканом 2 осуществляет горизонтальное перемещение под транспортный трубопровод 15.
После получения от датчика 20 пневмоцилиндра 7 информационного сигнала на пневмоцилиндр 11. через штуцер 22 подается сжатый воздух и передвижная каретка 5 вместе с приемным стаканом 2 осуществляют вертикальное перемещение и герметизируют выход транспортного трубопровода 15.
После получения от датчика 21 пневмоцилиндра 11 информационного сигнала через штуцер 25 узла 13 подается транспортирующий сжатый воздух для отправки порожнего транспортного контейнера 3 в соответствующую станцию автоматической загрузки пробы. После получения информационного сигнала о прибытии порожнего транспортного контейнера 3 в станцию автоматической загрузки пробы в транспортный контейнер 3 подачу транспортирующего сжатого воздуха отключают, и система микропроцессорного управления (на фигуре не показана) автоматическим стрелочным переводом переводится в режим ожидания прибытия следующего груженого транспортного контейнера.
Использование предлагаемого автоматического стрелочного перевода контейнерного пневмотранспорта позволит по сравнению с прототипом значительно упростить конструкцию и повысить его эксплуатационную надежность, а также упростить систему управления работой автоматического стрелочного перевода контейнерного пневмотранспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический стрелочный перевод контейнерного пневмотранспорта | 2020 |
|
RU2724571C1 |
| Автоматический стрелочный перевод контейнерного пневмотранспорта | 2020 |
|
RU2734563C1 |
| УСТАНОВКА ДЛЯ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВАНИЯ КОНТЕЙНЕРОВ ПО ТРУБОПРОВОДУ | 2015 |
|
RU2576462C1 |
| КОЛЬЦЕВАЯ МНОГОКОНТЕЙНЕРНАЯ СИСТЕМА ТРУБОПРОВОДНОГО КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА | 2015 |
|
RU2628821C2 |
| СТАНЦИЯ ВВОДА/ВЫВОДА КОНТЕЙНЕРОВ В СИСТЕМЕ ТРУБОПРОВОДНОГО КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА | 2017 |
|
RU2675008C1 |
| СПОСОБ БЕЗОСТАНОВОЧНОГО ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В СИСТЕМЕ КОНТЕЙНЕРНОГО ПНЕВМОТРАНСПОРТА | 2013 |
|
RU2518387C1 |
| Всасывающе-нагнетательная установка трубопроводного пневмотранспорта грузов | 1988 |
|
SU1643352A1 |
| Двухтрубная установка контейнерного пневмотранспорта | 1982 |
|
SU1024397A1 |
| Установка трубопроводного пневмотранспорта грузов в контейнерах | 1976 |
|
SU622726A1 |
| Приемоотправочная станция трубопроводной контейнерной пневмотранспортной системы | 1988 |
|
SU1643355A1 |
Изобретение относится к контейнерному трубопроводному пневмотранспорту и используется для оптимизации трасс доставки транспортных контейнеров путем автоматического перевода движения груженых контейнеров по одному из двух (или четырех) периферийных транспортных трубопроводов в один центральный транспортный трубопровод и возврата порожних контейнеров, перемещающихся по центральному транспортному трубопроводу в соответствующий периферийный транспортный трубопровод. Технический результат заключается в упрощении конструкции и повышении эксплуатационной надежности автоматического стрелочного перевода контейнерного пневмотранспорта и, соответственно, всей системы трубопроводного контейнерного пневмотранспорта. Устройство содержит передвижные каретки с приемными стаканами, пневмоцилиндры для горизонтальных перемещений передвижной каретки, узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха. Для управления работой автоматического стрелочного перевода на транспортных трубопроводах установлены датчики приема и отправки транспортных контейнеров, а датчики их положения установлены на всех пневмоцилиндрах. Узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха установлены на передвижных каретках. 1 ил.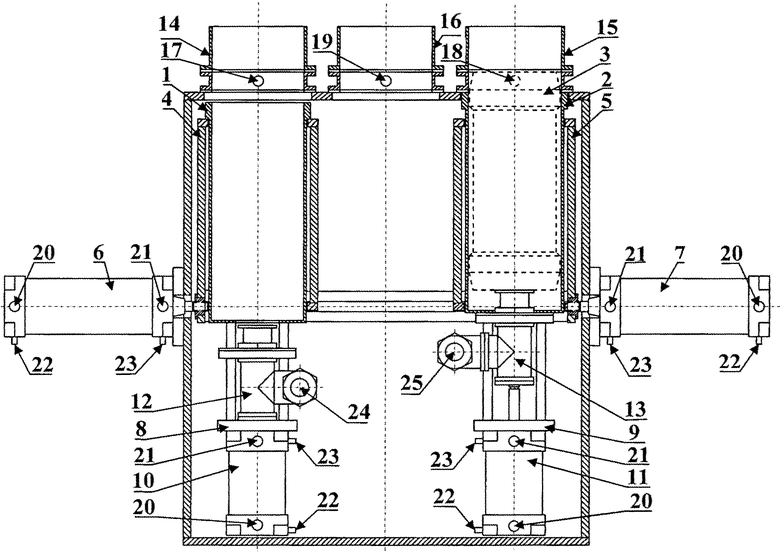
Автоматический стрелочный перевод контейнерного пневмотранспорта, содержащий передвижные каретки с приемными стаканами, пневмоцилиндры для горизонтальных перемещений передвижных кареток, узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха, причем для управления работой автоматического стрелочного перевода на транспортных трубопроводах установлены датчики приема и отправки транспортных контейнеров, а датчики их положения установлены на всех пневмоцилиндрах, отличающийся тем, что узлы для вертикального перемещения приемных стаканов и подачи транспортирующего сжатого воздуха установлены на передвижных каретках.
| УСТАНОВКА ДЛЯ ПНЕВМАТИЧЕСКОГО ТРАНСПОРТИРОВАНИЯ КОНТЕЙНЕРОВ ПО ТРУБОПРОВОДУ | 2015 |
|
RU2576462C1 |
| Приемно-отправочная станция системы трубопроводного контейнерного пневмотранспорта грузов | 1973 |
|
SU572411A1 |
| US 4037805 A1, 26.07.1977 | |||
| US 20150298919 A1, 22.10.2015. | |||

