Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к определению местонахождения в средах в помещении и, в частности, к системе определения местонахождения в помещении на основе радиочастот.
Уровень техники
Как известно, в последнее время все больше ощущается потребность в более и более надежных системах определения местонахождения.
В связи с этим, в последние годы было предложено много систем определения местонахождения, предназначенных для определения или отслеживания положения пользователей.
Системы определения местонахождения можно разбить на три основные категории: глобальные системы определения местоположения, крупномасштабные системы определения местоположения на основе сотовых сетей и системы определения местоположения в помещении.
Типичной глобальной системой определения местоположения является Глобальная система позиционирования (GPS), которая использует сигналы от множественных спутников для выполнения процесса мультилатерации для того, чтобы определять местоположения с точностью примерно 5 м. Однако GPS является неэффективной для использования в помещении или в городских зонах, где высокие здания экранируют сигналы спутников, т.е. в условиях нахождения в глубине помещения.
С другой стороны, крупномасштабные системы определения местоположения на основе сотовой сети, в общем случае, основаны на измерении интенсивностей сигналов для оценки расстояния между пользовательским терминалом и базовой станцией. Однако точность крупномасштабных систем определения местоположения в значительной степени ограничивается размером соты. Кроме того, эффективность этих систем для среды в помещении также ограничивается многократными отражениями, испытываемыми радиочастотным (РЧ) сигналом, который вызывает, например, явления многолучевого распространения и затенение.
Наконец, системы определения местоположения в помещении предназначены просто для выполнения определения местонахождения в средах в помещении. За последний год было предложено несколько систем определения местоположения в помещении на основе различных технологий, например инфракрасной (ИК), ультразвуковой, видеонаблюдения и РЧ сигнала. Из этих систем подходы на основе РЧ привлекли в последние годы повышенное внимание, поскольку РЧ системы определения местонахождения имеют особые преимущества в средах в помещении перед любыми другими системами.
Фактически, система определения местонахождения на основе РЧ является малозатратным решением и охватывает большую зону по сравнению с другими типами систем определения местоположения в помещении. Действительно, система определения местонахождения на основе РЧ может работать в большом здании или даже в группе зданий.
Кроме того, система определения местонахождения на основе РЧ является устойчивой системой благодаря стабильности распространения РЧ сигнала, в отличие от систем определения местоположения на основе видео или ИК, которые подвержены ограничениям, например ограничениям прямой видимости или низкой производительности при люминесцентном освещении или под прямыми солнечными лучами.
Типичные системы определения местонахождения на основе РЧ используют системы Wireless Fidelity (Wi-Fi) т.е. основанные на стандарте IEEE 802.11, а также другие беспроводные системы, например беспроводные сенсорные сети, сети на основе и т.д.
Фактически, в общем случае, система определения местонахождения на основе РЧ для среды в помещении содержит сеть передающих РЧ узлов, например сеть WiFi, содержащую множество передающих РЧ узлов, например обычных точек доступа, размещенных в окружающей среде в помещении и сконфигурированных с возможностью передавать соответственные РЧ сигналы по единственному радиоканалу. Система определения местонахождения на основе РЧ дополнительно содержит, по меньшей мере, электронное мобильное устройство, например лэптоп или карманный компьютер, местоположение которого в среде в помещении должно быть определено. Электронное мобильное устройство сконфигурировано с возможностью принимать РЧ сигналы от передающих РЧ узлов по единственному радиоканалу.
В общем случае, определение местонахождения электронного мобильного устройства, выполняемого системами определения местонахождения на основе РЧ, основано на подходе Интенсивность принятого сигнала (RSS), который ссылается на известную технику, согласно которой местоположение электронного мобильного устройства в окружающей среде в помещении оценивается путем сравнения сигнатуры текущей интенсивности принятого сигнала с хранящимися сигнатурами интенсивности опорного сигнала.
Общая философия подхода RSS состоит в установлении взаимно-однозначного соответствия между данным положением и средней интенсивностью сигнала, принятого в этом данном положении от передающих РЧ узлов.
В частности, системы определения местонахождения на основе РЧ нуждаются в обучении до выполнения определения местонахождения электронного мобильного устройства. Соответственно, процесс определения местонахождения содержит две основные фазы:
- фазу обучения, в которой средние мощности РЧ сигналов, принятых от передающих РЧ узлов по единственному радиоканалу, вычисляются в опорных положениях и заносятся в базу данных РЧ для создания РЧ карты среды в помещении, причем РЧ карта содержит в себе сигнатуры интенсивности опорного сигнала в опорных положениях; и
- онлайновая фаза, в которой электронное мобильное устройство, местоположение которого должно быть определено, вычисляет текущие мощности РЧ сигналов, принятых в его местоположении в окружающей среде в помещении от передающих РЧ узлов по единственному радиоканалу, после чего сравнивает текущие мощности со всеми кортежами базы данных РЧ для выбора того опорного положения РЧ карты, которое ближе по принятой мощности.
РЧ карта организована в виде массива, в котором каждая строка относится к мощностям РЧ сигналов, принятых в соответствующем опорном положении от передающих РЧ узлов, и каждая из них индексирует один столбец массива.
После того как электронное мобильное устройство вычислит текущие мощности РЧ сигналов, принятых от передающих РЧ узлов, и сформирует, на основании этих текущих мощностей, соответствующий вектор текущей мощности, оно сравнивает этот вектор текущей мощности со всеми строками РЧ карты для того, чтобы найти наилучшее совпадение.
Сравнение обычно основано на евклидовом расстоянии между вектором текущей мощности и каждой строкой РЧ карты, чтобы электронное мобильное устройство располагалось в том опорном положении, соответствующая строка которого в РЧ карте имеет наименьшее евклидово расстояние от вектора текущей мощности.
Сущность изобретения
Заявитель указал, что известные системы определения местонахождения на основе РЧ сталкиваются с рядом проблем, в основном, связанных с изменчивостью РЧ сигнала.
В частности, замирание может влиять на интенсивность РЧ сигнала, вызывая временную и пространственную изменчивость РЧ сигнала, что может приводить к неточной оценке текущей мощности.
В свою очередь, неточная оценка текущей мощности может приводить к выбору неверного кортежа базы данных РЧ, тем самым приводя к ошибочному определению местонахождения электронного мобильного устройства.
Кроме того, некоторые другие факторы влияют на интенсивность РЧ сигнала с точки зрения его изменчивости.
Например, симметричная топология среды в помещении или симметричное распределение передающих РЧ узлов может приводить к тому, что несколько кортежей базы данных РЧ будут иметь одинаковые значения RSS и, таким образом, может приводить к связыванию этих нескольких кортежей базы данных РЧ с текущими мощностями, вычисленными электронным мобильным устройством, и, таким образом, приводя к совершенно неверному оцененному местоположению электронного мобильного устройства.
Кроме того, с точки зрения временной изменчивости, в отсутствие заблаговременного усреднения текущих мощностей, их связь с кортежами базы данных РЧ может оказаться неверной, что влечет за собой плохую точность оценки местоположения электронного мобильного устройства.
Наконец, точность оценки местоположения известных систем определения местонахождения на основе РЧ также зависит от многих других факторов, например характеристик распространения радиоволн среды в помещении и количества передающих РЧ узлов.
Например, перемещение людей, а также закрывание и открывание дверей могут создавать скоротечные изменения характеристик распространения радиоволн среды в помещении и, таким образом, приводить к значительному изменению текущих мощностей, измеряемых электронным мобильным устройством, относительно мощностей, хранящихся в РЧ карте.
Первой задачей настоящего изобретения является обеспечение радиочастотной системы определения местонахождения на основе РЧ для среды в помещении, которая, в общем случае, позволяет сгладить, по меньшей мере частично, вышеозначенные проблемы, и, в частности, в меньшей степени подвержена изменчивости РЧ сигнала по сравнению с известными системами определения местонахождения на основе РЧ.
Другой задачей настоящего изобретения является обеспечение системы определения местонахождения на основе РЧ для среды в помещении, которая повышает точность оценки местоположения электронного мобильного устройства в окружающей среде в помещении по сравнению с известными системами определения местонахождения на основе РЧ, которые, в общем случае, достигают точности около 3 м.
Эти и другие задачи решаются настоящим изобретением за счет того, что оно относится к системе определения местонахождения в помещении, заданной в прилагаемой формуле изобретения.
Согласно настоящему изобретению, предложена система определения местонахождения в помещении для определения местоположения электронного мобильного устройства в окружающей среде в помещении, причем система определения местонахождения в помещении содержит множество передающих узлов, размещенных в разных положениях в окружающей среде в помещении и сконфигурированных с возможностью передавать РЧ сигналы; причем электронное мобильное устройство сконфигурировано с возможностью принимать РЧ сигналы от передающих узлов; причем система определения местонахождения в помещении сконфигурирована с возможностью работать в:
- режиме обучения, в котором опорные величины вычисляются на основе мощностей РЧ сигналов, принятых от передающих РЧ узлов в разных опорных положениях в окружающей среде в помещении; и
- режиме определения местоположения, в котором текущие величины вычисляются на основе мощностей РЧ сигналов, принятых электронным мобильным устройством в его текущем местоположении в окружающей среде в помещении от передающих РЧ узлов, и в котором текущее местоположение электронного мобильного устройства определяется на основе текущих и опорных величин;
причем система определения местонахождения в помещении отличается тем, что она сконфигурирована с возможностью работать на основе РЧ сигналов, по меньшей мере, по двум разным радиоканалам.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения, предпочтительные варианты осуществления, которые приведены исключительно для примера, но не в порядке ограничения, будут описаны ниже со ссылкой на прилагаемые чертежи (не все из которых выполнены в масштабе), на которых:
Фиг.1 схематически показывает систему определения местонахождения в помещении согласно настоящему изобретению;
Фиг.2 схематически показывает другой вариант осуществления системы определения местонахождения в помещении согласно настоящему изобретению;
Фиг.3 схематически показывает примера определения местонахождения, выполняемого системой определения местонахождения в помещении согласно настоящему изобретению;
Фиг.4 показывает обзор стековой структуры, схематически представляющий принципиальную архитектуру двух компонентов системы определения местонахождения в помещении согласно настоящему изобретению;
Фиг.5 схематически показывает пример двух разных радиоканалов;
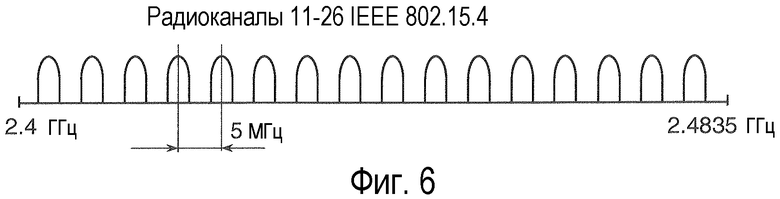
Фиг.6 показывает радиоканалы IEEE 802.15.4 в диапазоне 2.4-2.4835 ГГц;
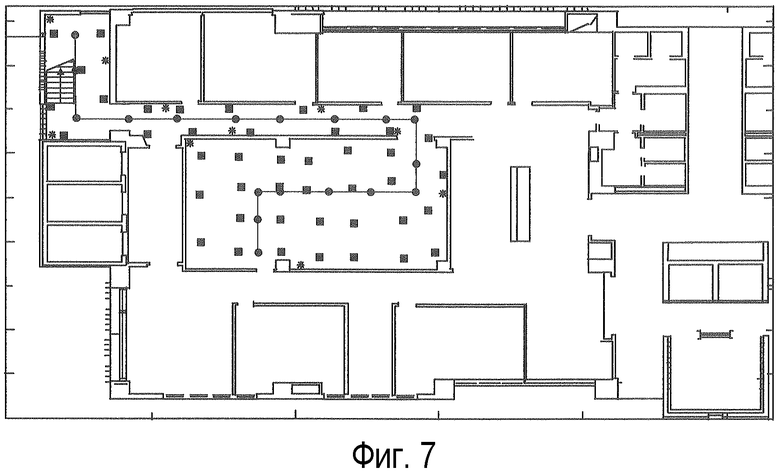
Фиг.7 показывает среду в помещении, в которой была испытана система определения местонахождения в помещении согласно настоящему изобретению; и
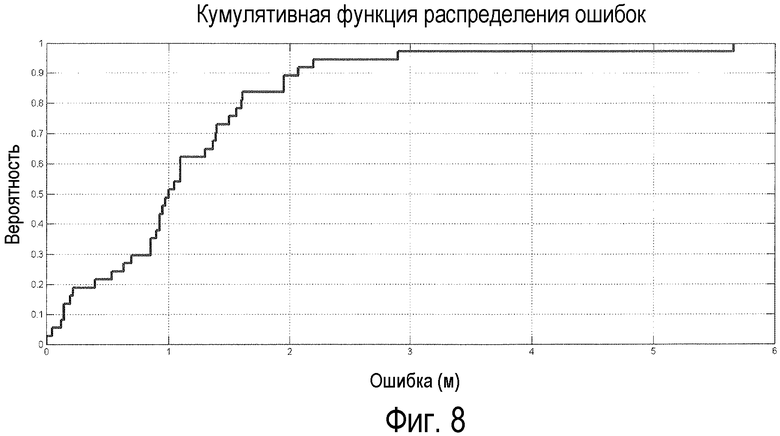
Фиг.8 показывает кумулятивную функцию распределения ошибок, вычисленную для испытания, выполненного над системой определения местонахождения в помещении согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления изобретения
Представлено нижеследующее рассмотрение, чтобы дать возможность специалисту в данной области техники изготовить и использовать настоящее изобретение. Специалист в данной области техники может предложить различные модификации вариантов осуществления, не выходя за рамки заявленного объема настоящего изобретения.
Таким образом, настоящее изобретение не ограничивается представленными вариантами осуществления, но призвано охватывать широчайший объем в соответствии с принципами и признаками, раскрытыми здесь и заданными в прилагаемой формуле изобретения.
Настоящее изобретение вытекает из интуитивных представлений Заявителя о применении разных радиоканалов для лучшей характеризации распространения радиоволн в общей среде в помещении.
Фактически, Заявитель провел обширное исследование по распространению сигналов в средах в помещении, в результате чего выяснилось, что при передаче сигналов в окружающей среде в помещении по разным радиоканалам, каждый радиоканал характеризуется соответствующей несущей, которая отличается от несущих других радиоканалов, что вызывает распространение сигналов разными путями и прием с разными характеристиками даже при передаче на постоянном уровне мощности. В предельных случаях сигнал, передаваемый по радиоканалу, может не приниматься приемником, в то время как тот же сигнал, передаваемый по другому радиоканалу, принимается.
Таким образом, использование разных радиоканалов для передачи одного и того же сигнала позволяет диверсифицировать измерения мощности в данном положении, тем самым повышая точность оценки местоположения в окружающих средах в помещении и позволяя решать проблемы изменчивости РЧ сигнала.
В частности, Фиг.1 схематически показывает систему 10 определения местонахождения в помещении согласно настоящему изобретению.
В частности, система 10 определения местонахождения в помещении содержит сеть 11 передающих РЧ узлов, содержащую множество передающих РЧ узлов 12, размещенных в разных положениях в окружающей среде в помещении и сконфигурированных с возможностью передавать РЧ сигналы, по меньшей мере, по двум разным радиоканалам.
Система 10 определения местонахождения в помещении также содержит, по меньшей мере, электронное мобильное устройство 13, местоположение которого в окружающей среде в помещении необходимо определить, причем электронное мобильное устройство 13 сконфигурировано с возможностью принимать РЧ сигналы от передающих РЧ узлов 12, по меньшей мере, по двум разным радиоканалам.
Кроме того, система 10 определения местонахождения в помещении сконфигурирована с возможностью работать в:
- режиме обучения, в котором опорные величины вычисляются на основе мощностей РЧ сигналов, принятых в разных известных опорных положениях в окружающей среде в помещении от передающих РЧ узлов 12, по меньшей мере, по двум разным радиоканалам; и
- режиме определения местоположения, в котором текущие величины вычисляются на основе мощностей РЧ сигналов, принятых электронным мобильным устройством 13 в его текущем местоположении в окружающей среде в помещении от передающих РЧ узлов 12, по меньшей мере, по двум разным радиоканалам, и в котором текущее местоположение электронного мобильного устройства 13 определяется на основе текущих и опорных величин.
Опорные величины могут, для удобства, представлять собой либо усредненные мощности, либо мгновенные мощности РЧ сигналов, принятых в разных известных опорных положениях от передающих РЧ узлов 12, по меньшей мере, по двум разным радиоканалам.
Кроме того, текущие величины могут, для удобства, представлять собой либо усредненные мощности, либо мгновенные мощности РЧ сигналов, принятых электронным мобильным устройством 13 в его текущем местоположении в окружающей среде в помещении от передающих РЧ узлов 12, по меньшей мере, по двум разным радиоканалам.
Предпочтительно, в режиме определения местоположения
- текущие величины сравниваются с опорными величинами для того, чтобы определять по меньшей мере одно известное опорное положение, в котором соответствующие опорные величины удовлетворяют данному соотношению с текущими величинами; и
- текущее местоположение электронного мобильного устройства 13 определяется на основе по меньшей мере одного определенного известного опорного положения.
Удобно, когда, в режиме обучения, РЧ карта среды в помещении создается и хранится, причем РЧ карта содержит, для каждого известного опорного положения, соответствующие векторы опорных величин, причем каждый из них содержит опорные величины, вычисленные на основе мощностей РЧ сигналов, принятых в известном опорном положении от передающих РЧ узлов 12 по соответствующему радиоканалу.
Таким образом, в РЧ карте количество векторов опорных величин для каждого известного опорного положения равно количеству разных радиоканалов, используемых системой 10 определения местонахождения в помещении.
Соответственно, в режиме определения местоположения
- векторы текущих величин формируются, причем каждый из них содержит текущие величины, вычисленные на основе мощностей РЧ сигналов, принятых электронным мобильным устройством 13 в его текущем местоположении в окружающей среде в помещении от передающих РЧ узлов 12 по соответствующему радиоканалу;
- по меньшей мере, одно известное опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин определяется; и
- текущее местоположение электронного мобильного устройства 13 определяется на основе по меньшей мере одного определенного известного опорного положения.
Таким образом, количество векторов текущих величин, сформированных для текущего местоположения электронного мобильного устройства 13, равно количеству разных радиоканалов, используемых системой 10 определения местонахождения в помещении.
Кроме того, согласно первому варианту осуществления настоящего изобретения, электронное мобильное устройство 13 сконфигурировано с возможностью:
- вычислять опорные величины в режиме обучения;
- хранить опорные величины в режиме обучения;
- вычислять текущие величины в режиме определения местоположения; и
- определять свое текущее местоположение на основе текущих и опорных величин в режиме определения местоположения.
Удобно, когда, согласно первому варианту осуществления настоящего изобретения, электронное мобильное устройство 13 дополнительно сконфигурировано с возможностью:
- в режиме обучения, создавать и хранить РЧ карту;
- в режиме определения местоположения, формировать векторы текущих величин;
- в режиме определения местоположения, определять по меньшей мере одно известное опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин; и
- в режиме определения местоположения, определять свое текущее местоположение на основе по меньшей мере одного определенного известного опорного положения.
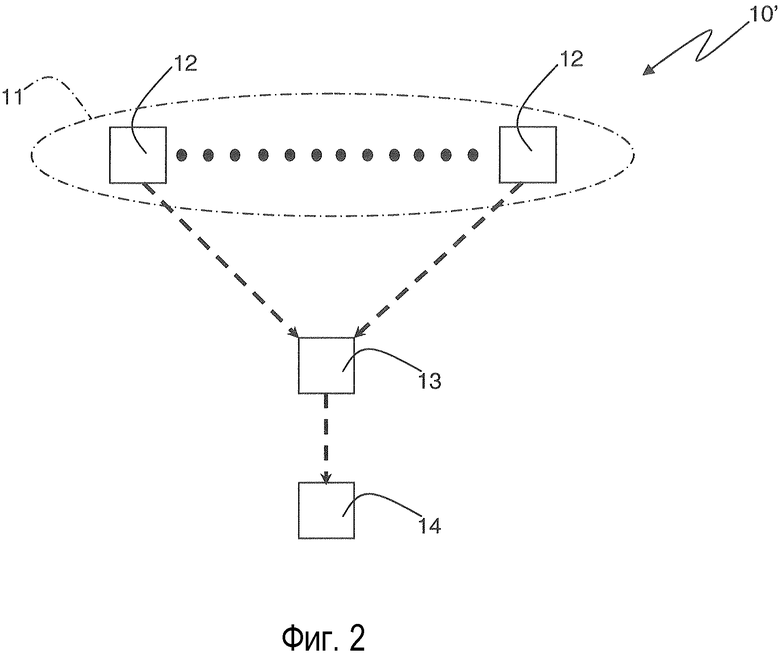
В порядке альтернативы, Фиг.2 показывает второй вариант осуществления настоящего изобретения, в котором система 10' определения местонахождения в помещении отличается от системы 10 определения местонахождения в помещении, показанной на Фиг.1, тем, что она дополнительно содержит центральный блок 14 обработки.
Согласно Фиг.2, электронное мобильное устройство 13 связано с центральным блоком 14 обработки и сконфигурировано с возможностью снабжать центральный блок 14 обработки опорными величинами в режиме обучения и текущими величинами в режиме определения местоположения.
Согласно второму варианту осуществления, центральный блок 14 обработки сконфигурирован с возможностью:
- хранить опорные величины в режиме обучения; и
- определять текущее местоположение электронного мобильного устройства 13 на основе текущих и опорных величин в режиме определения местоположения.
Удобно, когда, согласно второму варианту осуществления настоящего изобретения, центральный блок 14 обработки дополнительно сконфигурирован с возможностью:
- в режиме обучения, создавать и хранить РЧ карту;
- в режиме определения местоположения, формировать векторы текущих величин;
- в режиме определения местоположения, определять по меньшей мере одно известное опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин; и
- в режиме определения местоположения, определять текущее местоположение электронного мобильного устройства 13 на основе по меньшей мере одного определенного известного опорного положения.
Удобно, когда РЧ карта создается на основе базы данных, которая хранит каждую опорную величину в соответствующем кортеже, количество опорных величин и, таким образом, количество кортежей равно NKRP*NRC*NRFTN, где NKRP является количеством известных опорных положений, NRC является количеством разных радиоканалов, используемых системой 10 или 10' определения местонахождения в помещении, и NRFTN является количеством передающих РЧ узлов 12.
В частности, каждый кортеж хранит:
- соответствующую опорную величину;
- идентификатор передающего РЧ узла 12, который передал по меньшей мере один РЧ сигнал, на основе которого соответствующая опорная величина была вычислена;
- указатель радиоканала, по которому был принят по меньшей мере один РЧ сигнал, на основе которого соответствующая опорная величина была вычислена; и
- пространственные координаты известного опорного положения, в котором был принят по меньшей мере один РЧ сигнал, на основе которого соответствующая опорная величина была вычислена.
Кроме того, по меньшей мере одно известное опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин, можно, для удобства, определять, идентифицируя по меньшей мере одно известное опорное положение, соответствующие векторы опорных величин которого являются близким совпадением с векторами текущих величин.
В свою очередь, идентификация по меньшей мере одного известного опорного положения, соответствующие векторы опорных величин которого являются близким совпадением с векторами текущих величин, может быть, для удобства, основана на вычислении для каждого известного опорного положения, по меньшей мере, расстояния между векторами текущих величин и векторами опорных величин, соответствующими известному опорному положению.
Предпочтительно, вычисление для каждого известного опорного положения, по меньшей мере, расстояния может быть основано на евклидовой метрике.
Удобно, когда, вычисление для каждого известного опорного положения, по меньшей мере, расстояния на основе евклидовой метрики содержит вычисление некоторого количества евклидовых расстояний, равного количеству разных радиоканалов NRC, причем i-е евклидово расстояние, где i, очевидно, заключено между 1 и NRC, вычисляется между i-м вектором текущей величины, т.е. вектором мощности, содержащим текущие величины, вычисленные на основе мощностей РЧ сигналов, принятых по i-му радиоканалу, и i-м вектором опорной величины, соответствующим известному опорному положению, т.е. вектором опорной величины, содержащим опорные величины, вычисленные на основе мощностей РЧ сигналов, принятых в известном опорном положении по i-му радиоканалу.
Кроме того, при этом, текущее местоположение электронного мобильного устройства 13 можно определять согласно четырем разным подходам определения местонахождения.
Согласно первому подходу определения местонахождения, текущее местоположение электронного мобильного устройства 13 оценивается как известное опорное положение, для которого вычисляется наименьшее евклидово расстояние из всех вычисленных евклидовых расстояний.
Согласно второму подходу определения местонахождения, для каждого известного опорного положения параметр указателя расстояния вычисляется на основе евклидовых расстояний, вычисленных для известного опорного положения, и текущее местоположение электронного мобильного устройства 13 оценивается как известное опорное положение, для которого вычисляется наименьший параметр указателя расстояния из всех вычисленных параметров указателя расстояния.
Удобно, когда параметр указателя расстояния может быть суммой всех евклидовых расстояний, вычисленных для известного опорного положения.
Кроме того, согласно третьему подходу определения местонахождения, первое подмножество известных опорных положений идентифицируется, причем известные опорные положения, принадлежащие первому подмножеству, являются теми известными опорными положениями, для которых вычисляются наименьшие евклидовы расстояния из всех вычисленных евклидовых расстояний.
Другими словами, K1 известных опорных положений, которые связаны с наименьшими евклидовыми расстояниями из евклидовых расстояний, вычисленных для всех известных опорных положений, идентифицируются и затем включаются в первое подмножество, причем K1 является целым числом, большим 1.
Затем текущее местоположение электронного мобильного устройства 13 оценивается как географический центроид известных опорных положений, принадлежащих первому подмножеству.
Наконец, согласно четвертому подходу определения местонахождения, для каждого известного опорного положения, параметр указателя расстояния вычисляется на основе евклидовых расстояний, вычисленных для известного опорного положения, и второе подмножество известных опорных положений идентифицируется, причем известные опорные положения, принадлежащие второму подмножеству, являются теми известными опорными положениями, для которых вычисляются наименьшие параметры указателя расстояния из всех вычисленных параметров указателя расстояния.
Другими словами, K2 известных опорных положений, имеющих наименьшие параметры указателя расстояния из параметров указателя расстояния, вычисленных для всех известных опорных положений, идентифицируются и затем включаются во второе подмножество, причем K2 является целым числом, большим 1.
Удобно, когда параметр указателя расстояния может быть суммой всех евклидовых расстояний, вычисленных для известного опорного положения.
Затем текущее местоположение электронного мобильного устройства 13 оценивается как географический центроид известных опорных положений, принадлежащих второму подмножеству.
Как известно, пространственные координаты (xB , yB, zB) географического центроида K положений Pi(xi,yi,zi) вычисляются следующим образом:

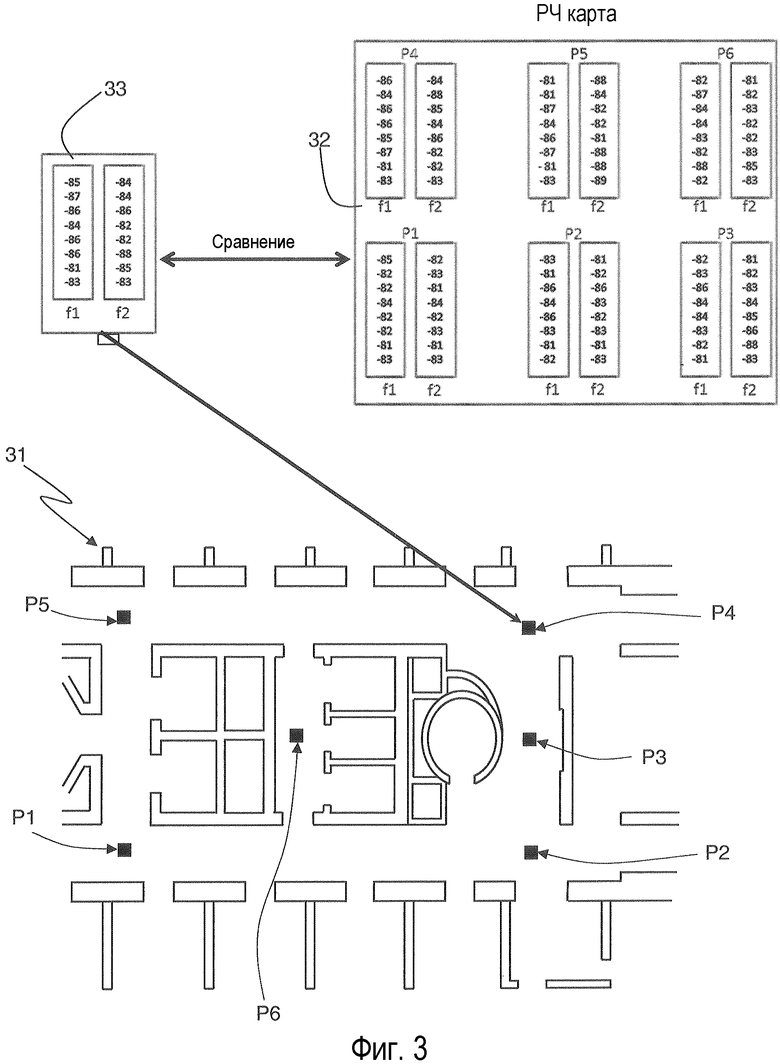
Фиг.3 показывает пример определения местонахождения, выполняемого системой определения местонахождения в помещении согласно настоящему изобретению.
В частности, Фиг.3 показывает среду 31 в помещении, связанную с системой определения местонахождения в помещении (не показана) согласно настоящему изобретению, которая использует два разных радиоканала для определения местоположения электронного мобильного устройства (не показано), которое находится в окружающей среде 31 в помещении, причем первый радиоканал из двух разных радиоканалов соответствует первой частоте f1, и второй радиоканал соответствует второй частоте f2.
Кроме того, согласно Фиг.3, в окружающей среде 31 в помещении существует шесть известных опорных положений, соответственно P1, P2, P3, P4, P5 и P6.
Вместе со средой 31 в помещении Фиг.3 также показывает РЧ карту 32, созданную и хранящуюся системой определения местонахождения в помещении, причем РЧ карта 32 содержит, для каждого из шести известных опорных положений P1, P2, P3, P4, P5 и P6, два соответствующих вектора опорных величин, каждый из которых содержит опорные величины, вычисленные на основе мощностей РЧ сигналов, принятых в рассматриваемом известном опорном положении от передающих РЧ узлов по соответствующему радиоканалу.
Кроме того, Фиг.3 также показывает два вектора 33 текущих величин, каждый из которых содержит текущие величины, вычисленные на основе мощностей РЧ сигналов, принятых электронным мобильным устройством в его текущем местоположении в окружающей среде 31 в помещении от передающих РЧ узлов по соответствующему радиоканалу.
На основе сравнения между векторами 33 текущих величин и РЧ картой 32, система определения местонахождения в помещении определяет местоположение электронного мобильного устройства в известном опорном положении P4, поскольку векторы опорных величин, соответствующие известному опорному положению P4, являются наиболее близким совпадением с векторами 33 текущих величин.
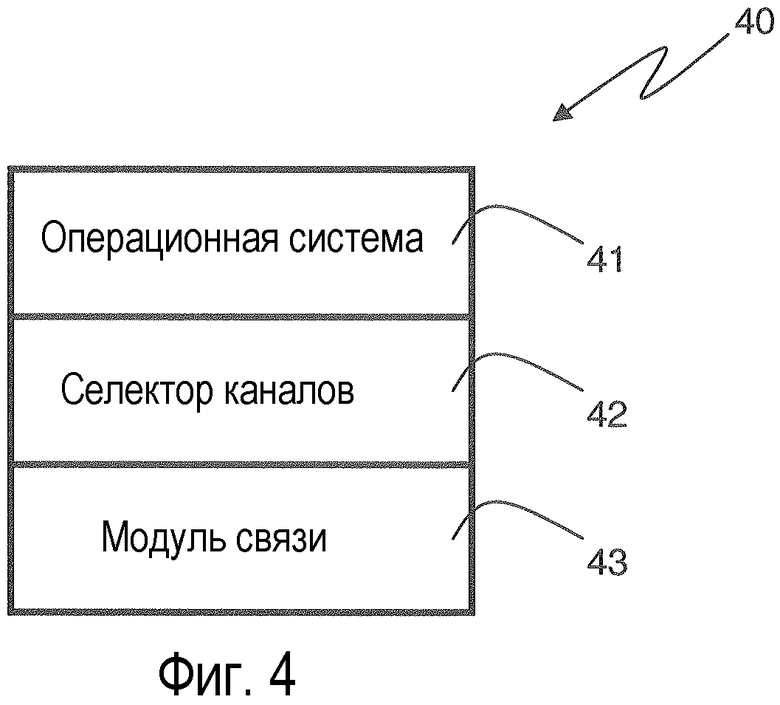
Кроме того, Фиг.4 показывает обзор стековой структуры 40, схематически представляющий принципиальную архитектуру передающих РЧ узлов 12 и электронного мобильного устройства 13.
В частности, согласно Фиг.4, стековая структура 40 содержит:
- операционную систему 41 на верхнем уровне стековой структуры 40;
- селектор 42 каналов на среднем уровне стековой структуры 40; и
- модуль связи 43 на нижнем уровне стековой структуры 40.
В частности, селектор 42 каналов сконфигурирован с возможностью динамически выбирать один радиоканал для передачи и/или приема, по меньшей мере, из двух разных радиоканалов, используемых системой определения местонахождения в помещении согласно настоящему изобретению.
Селектор 42 каналов может быть реализован программным обеспечением или реализован аппаратными средствами и может взаимодействовать через программное обеспечение и/или аппаратные средства с модулем 43 связи для того, чтобы передавать/принимать по выбранному радиоканалу в течение данного периода времени.
Удобно, когда как селекторы 42 каналов передающих РЧ узлов 12, так и селектор 42 каналов электронного мобильного устройства 13 имеют один и тот же шаблон выбора разных радиоканалов и всегда синхронизированы на одном и том же выбранном радиоканале.
Альтернативно, селектор 42 каналов электронного мобильного устройства 13 выбирает, и, таким образом, электронное мобильное устройство 13 принимает по нему каждый радиоканал в течение времени TL прослушивания, достаточно длинного, чтобы позволить селекторам 42 каналов передающих РЧ узлов 12 выбирать, и, таким образом, передающим РЧ узлам 12 передавать по радиоканалу, выбранному селектором 42 каналов электронного мобильного устройства 13, и электронное мобильное устройство 13 могло собирать достаточное количество измерений мощности.
В частности, время TL прослушивания можно задать в виде:
TL=NRC*TT,
где NRC является количеством разных радиоканалов, используемых системой 10 или 10' определения местонахождения в помещении, и TT является временем передачи передающих РЧ узлов 12 по каждому радиоканалу.
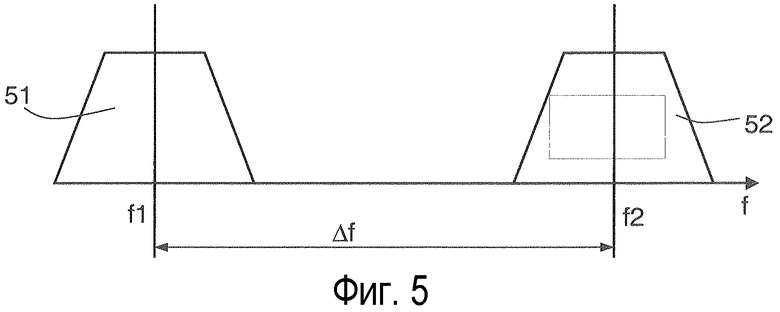
Фиг.5 схематически показывает пример двух разных радиоканалов с частотным разделением Δf.
В частности, Фиг.5 показывает первый радиоканал 51 на первой частоте f1 и второй радиоканал 52 на второй частоте f2, разделенных друг от друга частотным разделением Δf, которое равно f2-f1.
Система определения местонахождения в помещении согласно настоящему изобретению может быть выгодно реализована посредством различных технологий, таких как Wi-Fi, Bluetooth, ZigBee или Ultra Wide-Band (UWB).
Кроме того, Заявитель выполнил тщательные испытания для того, чтобы оценить характеристики системы определения местонахождения в помещении согласно настоящему изобретению.
В частности, система определения местонахождения в помещении может быть реализована посредством технологии беспроводной сенсорной сети.
В частности, беспроводная сенсорная сеть состоит из миниатюрных и маломощных интеллектуальных приемопередатчиков, которые одновременно могут играть роль как передатчиков, так и приемников.
Заявитель использовал, в качестве электронного мобильного устройства, местоположение которого необходимо определить, и в качестве передающих РЧ узлов, приемопередатчики на основе стандарта IEEE 802.15.4, который позволяет динамически выбирать один радиоканал из шестнадцати доступных радиоканалов в диапазоне 2.4-2.4835 ГГц.
В частности, Фиг.6 схематически показывает шестнадцать радиоканалов IEEE 802.15.4 в диапазоне 2.4-2.4835 ГГц, т.е. от радиоканала 11 IEEE 802.15.4 до радиоканала 26 IEEE 802.15.4.
Удобно, когда приемопередатчики, играющие роль передающих РЧ узлов, установлены на стенах в известных положениях, причем каждый передающий РЧ узел сконфигурирован с возможностью осуществлять радиовещание по радиоканалам 11, т.е. на частоте 2.405 ГГц, и 26, т.е. на частоте 2.480 ГГц стандарта IEEE 802.15.4.
В частности, предпочтительно, чтобы каждый передающий РЧ узел посылал сообщение каждые 100 мс с мощностью 3 дБм по одному из двух радиоканалов IEEE 802.15.4, 11 и 26, и затем переключался на другой радиоканал IEEE 802.15.4. Эта процедура повторяется циклически.
Пример структуры сообщений, посылаемых передающими РЧ узлами, показан в нижеследующей таблице:
в которой
- поле Tx ID содержит в себе идентификатор передающего РЧ узла, который передает сообщение, причем идентификатор удобно кодировать восемью битами;
- поле Radio Channel Number содержит в себе номер радиоканала, который указывает радиоканал, по которому сообщение передается и, таким образом, принимается, причем номер радиоканала удобно кодировать восемью битами; и
- поле Sequence Number содержит в себе порядковый номер, используемый электронным мобильным устройством, которое принимает сообщение во избежание дублирования сообщений, причем порядковый номер удобно кодировать тридцатью двумя битами.
Фиг.7 показывает среду в помещении, в которой система определения местонахождения в помещении согласно настоящему изобретению была испытана.
Среда в помещении, показанная на Фиг.7, представляет типичный случай современного офисного здания, отличающегося небольшими комнатами, расположенными вдоль длинных коридоров и содержащего стены малого/среднего размера.
На Фиг.7 также показан пример оценки местоположения.
В частности, на Фиг.7 квадратные точки представляют известные опорные положения, круглые точки представляют местоположения электронных мобильных устройств, оцененные системой определения местонахождения в помещении, и звездообразные точки представляют передающие РЧ узлы.
Характеристики системы определения местонахождения в помещении согласно настоящему изобретению были проанализированы с учетом функции f(xi, yi, zi) ошибок, заданной следующим образом:
 ,
,
при этом (xi, yi, zi) является реальным положением электронного мобильного устройства, и (xi', yi', zi') является местоположением электронного мобильного устройства, оцененным системой определения местонахождения в помещении.
Заявитель провел большое количество испытаний, изменяя некоторые параметры, например количество передающих РЧ узлов, известные опорные положения и характеристики распространения радиоволн среды в помещении.
В частности, в ходе испытаний было учтено, что электронное мобильное устройство, местоположение которого необходимо определить, может перемещаться многими различными путями, и каждое известное опорное положение было выбрано так, чтобы его могли видеть по меньшей мере три разных передающих РЧ узла.
Кроме того, для каждого испытания были вычислены кумулятивная функция распределения ошибок, средняя ошибка и стандартное отклонение функции f(xi, yi, zi) ошибок.
В частности, Фиг.8 показывает пример кумулятивной функции распределения ошибок, вычисленной для одного типичного испытания.
Как было отмечено на Фиг.8, система определения местонахождения в помещении согласно настоящему изобретению способна гарантировать точность оценки местоположения в 1.3 м с вероятностью 61%.
Из вышеизложенного можно непосредственно заключить, что система определения местонахождения в помещении согласно настоящему изобретению в меньшей степени подвержена изменчивости РЧ сигнала и достигает более высокой точности оценки местоположения, чем известные системы определения местонахождения на основе РЧ.
Кроме того, может быть полезным указать, что настоящее изобретение можно выгодно применять в экстренных случаях в помещении, когда нужно обнаруживать людей или товары, а также для того, чтобы обеспечить контекстно-зависимые услуги, которые, в общем случае, используют информацию о контексте пользователя для обеспечения улучшенного обслуживания на основе положения пользователя.
Примерами контекстно-зависимых услуг на основе положения пользователя являются телефонная связь с сопровождением абонента, которая перенаправляет телефонные вызовы в текущее местоположение пользователя, служба «печать в любом месте», которая выбирает ближайший принтер для мобильных пользователей, и интеллектуальное обслуживание туристов, которое предоставляет справочную информацию на основе местоположения туриста.
Наконец, очевидно, что настоящее изобретение допускает многочисленные модификации и варианты, все попадающие в объем изобретения, заданного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ СПУТНИКОВОЙ СВЯЗИ В ТУННЕЛЯХ | 2009 |
|
RU2528166C2 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| ИСПОЛЬЗОВАНИЕ РАДИОКАНАЛОВ | 2014 |
|
RU2668291C2 |
| КОНФИГУРИРОВАНИЕ РАДИОРЕСУРСОВ | 2019 |
|
RU2748314C1 |
| СИСТЕМЫ И СПОСОБЫ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ БЕСПРОВОДНОГО УСТРОЙСТВА | 2017 |
|
RU2715725C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТЕРМИНАЛА В ЗОНЕ ПОКРЫТИЯ СЕТИ | 2010 |
|
RU2537960C2 |
| Способ навигации и позиционирования объектов внутри помещений на основе системы определения местоположения в реальном времени | 2023 |
|
RU2811366C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЗИЦИОНИРОВАНИЯ ПЕРСОНАЛА В ЗДАНИЯХ ПОСРЕДСТВОМ РАДИОЧАСТОТНЫХ МЕТОК | 2022 |
|
RU2787476C1 |
Изобретение относится к системам определения местоположения в средах в помещении и, в частности, в системе определения местоположения на основе радиочастот для отслеживания положения пользователя. Изобретение предназначено для повышения точности оценки местоположения электронного мобильного устройства в окружающей среде в помещении. Система (10; 10') определения местонахождения в помещении содержит множество передающих узлов (12), размещенных в разных положениях в окружающей среде в помещении и сконфигурированных с возможностью передавать РЧ сигналы. Электронное мобильное устройство (13) сконфигурировано с возможностью принимать РЧ сигналы от передающих узлов (12). Система (10; 10') определения местонахождения в помещении сконфигурирована с возможностью работать в режиме обучения, в котором опорные величины вычисляются на основе мощностей РЧ сигналов, принятых от передающих узлов (12) в разных опорных положениях в окружающей среде в помещении. Система (10; 10') определения местонахождения в помещении дополнительно сконфигурирована с возможностью работать в режиме определения местоположения, в котором текущие величины вычисляются на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в его текущем местоположении в окружающей среде в помещении от передающих узлов (12), и в котором текущее местоположение электронного мобильного устройства (13) определяется на основе текущих и опорных величин. Система (10; 10') определения местонахождения в помещении отличается тем, что она сконфигурирована с возможностью работать на основе РЧ сигналов, по меньшей мере, по двум разным радиоканалам. 14 з.п. ф-лы, 8 ил.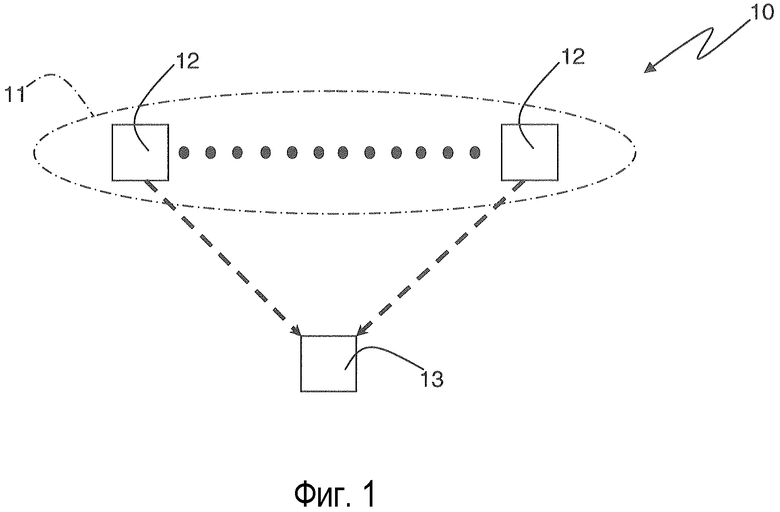
1. Система (10; 10') определения местонахождения в помещении для определения местоположения электронного мобильного устройства в окружающей среде в помещении, содержащая
множество передающих узлов (12), размещенных в разных положениях в окружающей среде в помещении и сконфигурированных с возможностью передавать РЧ сигналы; и
электронное мобильное устройство (13), сконфигурированное с возможностью принимать РЧ сигналы от передающих узлов (12);
причем система (10; 10') определения местонахождения в помещении сконфигурирована с возможностью работать в
режиме обучения, в котором электронное мобильное устройство (13) выполнено с возможностью вычислять опорные величины на основе мощностей РЧ сигналов, принятых от передающих узлов (12) в разных опорных положениях в окружающей среде в помещении, и
режиме определения местоположения, в котором электронное мобильное устройство (13) выполнено с возможностью вычислять текущие величины на основе мощностей РЧ сигналов, принятых от передающих узлов (12) в своем текущем местоположении в окружающей среде в помещении, и в котором текущее местоположение электронного мобильного устройства (13) определяется на основе текущих и опорных величин;
причем система (10; 10') определения местонахождения в помещении отличается тем, что
передающие узлы (12) выполнены с возможностью передавать как в режиме обучения, так и в режиме определения местоположения, РЧ сигналы, по меньшей мере, по двум разным радиоканалам;
электронное мобильное устройство (13) выполнено с возможностью вычислять, в режиме обучения, для каждого опорного положения и каждого из, по меньшей мере, двух разных радиоканалов, соответствующие опорные величины на основе РЧ сигналов, принятых электронным мобильным устройством (13) в упомянутом опорном положении от передающих узлов (12) по упомянутому радиоканалу;
электронное мобильное устройство (13) выполнено с возможностью вычислять, в режиме определения местоположения, для каждого из, по меньшей мере, двух разных радиоканалов, соответствующие опорные величины на основе РЧ сигналов, принятых электронным мобильным устройством (13) в его текущем местоположении от передающих узлов (12) по упомянутому радиоканалу.
2. Система (10) определения местонахождения в помещении по п.1, в которой электронное мобильное устройство (13) дополнительно сконфигурировано с возможностью
хранить опорные величины, вычисленные в режиме обучения; и
определять свое текущее местоположение на основе текущих и опорных величин в режиме определения местоположения.
3. Система (10') определения местонахождения в помещении по п.1, дополнительно содержащая центральный блок (14) обработки, связанный с электронным мобильным устройством (13), которое дополнительно сконфигурировано с возможностью снабжать центральный блок (14) обработки опорными величинами в режиме обучения и текущими величинами в режиме определения местоположения; причем центральный блок (14) обработки сконфигурирован с возможностью
хранить опорные величины, вычисленные в режиме обучения; и
определять текущее местоположение электронного мобильного устройства (13) на основе текущих и опорных величин в режиме определения местоположения.
4. Система (10) определения местонахождения в помещении по п.1, в которой электронное мобильное устройство (13) дополнительно сконфигурировано с возможностью
в режиме обучения, создавать и хранить РЧ карту окружающей среды в помещении, причем РЧ карта содержит для каждого опорного положения соответствующие векторы опорных величин, каждый из которых содержит опорные величины, вычисленные на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в опорном положении от передающих узлов (12) по соответствующему радиоканалу;
в режиме определения местоположения, формировать векторы текущих величин, причем каждый вектор текущей величины содержит текущие величины, вычисленные на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в его текущем местоположении от передающих узлов (12) по соответствующему радиоканалу;
в режиме определения местоположения, определять, по меньшей мере, одно опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин; и
в режиме определения местоположения, определять свое текущее местоположение на основе, по меньшей мере, одного определенного опорного положения.
5. Система (10') определения местонахождения в помещении по п.1, дополнительно содержащая центральный блок (14) обработки, связанный с электронным мобильным устройством (13), которое дополнительно сконфигурировано с возможностью снабжать центральный блок (14) обработки опорными величинами в режиме обучения и текущими величинами в режиме определения местоположения; причем центральный блок (14) обработки сконфигурирован с возможностью
в режиме обучения, создавать и хранить РЧ карту окружающей среды в помещении, причем РЧ карта содержит для каждого опорного положения соответствующие векторы опорных величин, каждый из которых содержит опорные величины, вычисленные электронным мобильным устройством (13) на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в опорном положении от передающих узлов (12) по соответствующему радиоканалу;
в режиме определения местоположения, формировать векторы текущих величин, причем каждый вектор текущей величины содержит текущие величины, вычисленные электронным мобильным устройством (13) на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в его текущем местоположении от передающих узлов (12) по соответствующему радиоканалу;
в режиме определения местоположения, определять, по меньшей мере, одно опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин; и
в режиме определения местоположения, определять текущее местоположение электронного мобильного устройства (13) на основе, по меньшей мере, одного определенного опорного положения.
6. Система (10; 10') определения местонахождения в помещении по п.4 или 5, в которой РЧ карта создается на основе базы данных, которая содержит множество кортежей, причем каждый кортеж хранит соответствующую опорную величину,
идентификатор передающего узла (12), который передал РЧ сигнал, на основе которого электронным мобильным устройством (13) была вычислена соответствующая опорная величина;
указатель радиоканала, по которому электронным мобильным устройством (13) был принят РЧ сигнал, на основе которого была вычислена соответствующая опорная величина; и
пространственные координаты опорного положения, в котором электронным мобильным устройством (13) был принят РЧ сигнал, на основе которого была вычислена соответствующая опорная величина.
7. Система (10; 10') определения местонахождения в помещении по п.4 или 5, в которой, по меньшей мере, одно опорное положение, соответствующие векторы опорных величин которого удовлетворяют данному соотношению с векторами текущих величин, определяется на основе вычисления для каждого опорного положения соответственных евклидовых расстояний, каждое из которых вычисляется между соответствующим вектором текущей величины, содержащим текущие, величины, вычисленные электронным мобильным устройством (13) на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) по соответственному радиоканалу, и соответствующим вектором опорной величины, который содержит опорные величины, вычисленные электронным мобильным устройством (13) на основе мощностей РЧ сигналов, принятых электронным мобильным устройством (13) в опорном положении по соответственному радиоканалу.
8. Система (10; 10') определения местонахождения в помещении по п.7, в которой текущее местоположение электронного мобильного устройства (13) оценивается как опорное положение, для которого вычислено наименьшее евклидово расстояние из всех вычисленных евклидовых расстояний.
9. Система (10; 10') определения местонахождения в помещении по п.7, в которой для каждого опорного положения параметр указателя расстояния вычисляется на основе соответствующих евклидовых расстояний, вычисленных для опорного положения, причем текущее местоположение электронного мобильного устройства (13) оценивается как опорное положение, для которого вычислен наименьший параметр указателя расстояния из всех вычисленных параметров указателя расстояния.
10. Система (10; 10') определения местонахождения в помещении по п.7, в которой идентифицируется первое подмножество опорных положений, причем опорные положения, принадлежащие первому подмножеству, являются теми опорными положениями, для которых вычислены наименьшие евклидовы расстояния из всех вычисленных евклидовых расстояний, причем текущее местоположение электронного мобильного устройства (13) оценивается как географический центроид опорных положений, принадлежащих первому подмножеству.
11. Система (10; 10') определения местонахождения в помещении по п.7, в которой для каждого опорного положения параметр указателя расстояния вычисляется на основе соответствующих евклидовых расстояний, вычисленных для опорного положения, и в которой идентифицируется второе подмножество опорных положений, причем опорные положения, принадлежащие второму подмножеству, являются теми опорными положениями, для которых вычисляются наименьшие параметры указателя расстояния из всех вычисленных параметров указателя расстояния, причем текущее местоположение электронного мобильного устройства (13) оценивается как географический центроид опорных положений, принадлежащих второму подмножеству.
12. Система (10; 10') определения местонахождения в помещении по любому из пп.9-11, в которой параметр указателя расстояния, вычисленный для каждого опорного положения, является суммой всех евклидовых расстояний, вычисленных для опорного положения.
13. Система (10; 10') определения местонахождения в помещении по любому из пп.1, 2, 3, 4, 5, 8, 9, 10 и 11, в которой электронное мобильное устройство (13) содержит селектор (42) первого канала, сконфигурированный с возможностью динамически выбирать один радиоканал, по меньшей мере, из двух разных радиоканалов, по которым принимают РЧ сигналы от передающих узлов (12), и в которой каждый передающий узел (12) содержит соответствующий селектор (42) второго канала, сконфигурированный с возможностью динамически выбирать один радиоканал, по меньшей мере, из двух разных радиоканалов, по которым передают РЧ сигналы.
14. Система (10; 10') определения местонахождения в помещении по п.13, в которой селектор (42) первого канала и селекторы (42) второго канала сконфигурированы с возможностью иметь один и тот же шаблон выбора, по меньшей мере, из двух разных радиоканалов, чтобы быть синхронизированными на одном и том же выбранном радиоканале.
15. Система (10; 10') определения местонахождения в помещении по п.13, в которой селектор (42) первого канала сконфигурирован с возможностью выбирать каждый радиоканал в течение времени (TL) прослушивания достаточно продолжительного, чтобы позволить селекторам (42) второго канала выбрать радиоканал, выбранный селектором (42) первого канала.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СОТОВОГО ТЕЛЕФОНА | 1994 |
|
RU2107925C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

