Изобретение относится к вооружению и военной технике, а именно к мишенным обстановкам, способам защиты объектов и может быть использовано при проведении испытаний новых образцов ракетно-артиллерийского вооружения и авиационных средств поражения, а также для решения задач в военное время для создания ложных целей.
Известен способ формирования пространственной крупногабаритной мишени, например, многофункциональной модульной морской мишенной установки /1/, заключающийся в монтаже на унифицированной платформе множества пластиковых корпусных элементов кубической формы, а также различных устройств и средств имитации - бортовой проекции корабля, радиолокационного, фонового теплового и акустического полей и т.п.
К недостаткам данного способа, а также устройства для его осуществления можно отнести следующие:
1 - в случае использования на земной поверхности - отсутствие мобильности, т.е. фактическая привязка мишени к некой точке с конкретными географическими координатами.
2 - из вышеуказанного п. 1 следуют большие временные затраты на монтаж/демонтаж и передислокацию мишени.
3 - отсутствие универсальности, заключающееся в стационарности формы мишени, - конкретная форма имитируемого объекта в соответствии со способом задается без возможности быстрой трансформации.
Также известен способ формирования пространственной крупногабаритной мишени 121, заключающийся в размещении в воздушном пространстве одного или нескольких взаимно соединенных надувных элементов, снабженных средствами имитации радиолокационного и теплового полей реального объекта, с использованием в качестве средства их доставки в заданную точку воздушного пространства беспилотных летающих аппаратов (БПЛА).
Этот способ также не лишен недостатков:
1 - необходимость для осуществления крупногабаритных надувных элементов и соответствующего насосно-компрессорного оборудования.
2 - сложность стабилизации в воздушном пространстве средств имитации цели вследствие большой парусности надувных элементов.
3 - отсутствие универсальности, заключающееся в стационарности формы мишени, - конкретная форма имитируемого объекта в соответствии со способом задается без возможности быстрой трансформации.
4 - сложность реализации визуального облика мишени, соответствующего реальному объекту, и т.д.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является способ формирования пространственной крупногабаритной имитационно-мишенной обстановки (ложной цели) /3/ путем создания ее временного изображения, в котором создание временного изображения осуществляется посредством размещения в воздушном пространстве множества отдельных устройств-имитаторов физических характеристик реального объекта.
В соответствии с описанием изобретения /3/, «указанный способ включает стадии подготовки множества снарядов в каждом канале ствола одной или нескольких сборок стволов,… указанные снаряды включают материал, формирующий изображение для имитации конкретных характеристик цели, по которым осуществляется наведение ракеты на цель, при этом производится выстрел предопределенного числа снарядов из выбранной сборки стволов и развертывание материала, формирующего временное изображение и отводящего приближающуюся ракету от цели».
Наряду с рядом достоинств по сравнению со способом-аналогом, данный способ также не лишен и ряда недостатков:
1 - Использование способа не обеспечивает визуального облика реального объекта, а преимущественно дает имитацию только тепловой и радиолокационной его сигнатур.
2 - Способ требует больших материальных затрат на применение, обусловленных потребностью в большом количестве специальных боеприпасов, несущих устройства-имитаторы, фактически предназначенных для однократного применения.
3 - Сложность синхронизации большого количества выстрелов из сборок стволов.
4 - Сложность обеспечения "попадания" множества снарядов в заданную область воздушного пространства и срабатывания их в заданный момент времени, и, как следствие, низкая степень имитации реального объекта.
5 - Кратковременность действия и экологическое загрязнение окружающей среды, вследствие быстрого падения снарядов на землю (водную поверхность) под действием силы тяжести.
Технической задачей предлагаемого изобретения является обеспечение высокой степени имитации реального объекта, увеличение времени функционирования мишенной обстановки и обеспечение мобильного управления ее имитационными характеристиками, исключение экологического загрязнения окружающей среды, а также относительное снижение эксплуатационных расходов.
Решение задачи достигается тем, что в известном способе формирования пространственной крупногабаритной имитационно-мишенной обстановки путем создания ее временного изображения посредством размещения в воздушном пространстве множества отдельных устройств-имитаторов физических характеристик реального объекта, в соответствии с изобретением устройства-имитаторы размещаются в воздушном пространстве в виде соответствующих раздельно транспортируемых устройств на совокупности беспилотных летательных аппаратов (БПЛА), например квадракоптеров, эшелонированных по высоте, ширине и глубине фронта в соответствии со структурой имитируемого реального объекта.
Высокая степень имитации реального объекта при реализации предложенного способа достигается за счет соответствующего пространственного построения БПЛА и размещения на них устройств-имитаторов.
Так, например, часть БПЛА, расположенных в вертикальной плоскости, могут нести отдельные фрагменты визуального изображения имитируемого объекта, образуя, таким образом, его "растровое" изображение, с определенной дистанции воспринимаемое системами наведения (самонаведения) испытуемого образца ракетно-артиллерийского вооружения или атакующего вражеского боеприпаса, как целое.
На еще одной части БПЛА, также расположенной в вертикальной плоскости на небольшом расстоянии за группой БПЛА визуальной имитации, могут транспортироваться устройства-имитаторы радиолокационного (электромагнитного) облика имитируемого объекта, - различные сочетания уголковых отражателей, устройства-излучатели в радиодиапазоне и т.п., а положение этих БПЛА в пространстве устанавливается в соответствии с расположением, например, наиболее металлоемких элементов конструкции реального объекта.
Наконец, отдельная часть БПЛА, ответственная за имитацию тепловой сигнатуры имитируемого объекта, может располагаться также в вертикальной плоскости перед группой БПЛА визуальной имитации, и транспортировать совокупность тепловыделяющих устройств, -пиротехнических или электрических.
Кроме вышеуказанных устройств-имитаторов, отдельные БПЛА могут при необходимости транспортировать также имитаторы светового облика объекта, акустического облика и т.п.
В случае использования квадракоптеров, расстояния между описанными отдельными группами БПЛА и отдельных БПЛА в группе будут определяться в зависимости от взаимного влияния их винтомоторных устройств.
Полетное время современных квадракоптеров составляет, в зависимости от конкретной модели и несомого полезного груза, порядка 10…60 минут, поэтому по сравнению со способом-прототипом, предложенный способ обеспечивает как увеличение времени функционирования пространственной крупногабаритной имитационно-мишенной обстановки, так и мобильное управление ее имитационными характеристиками, т.к. в соответствии с полетной программой и с использованием компьютерного управления каждым БПЛА по отдельности возможно их взаимное перестроение в любых комбинациях, а также регулировка работы несомых ими устройств-имитаторов (например, устройств-излучателей в радиодиапазоне, тепловыделяющих устройств с электронагревом и т.п.).
Исключение экологического загрязнения окружающей среды, а также относительное снижение эксплуатационных расходов при использовании предложенного способа достигается во-первых за счет возможности многократного применения обеспечивающих его технических устройств, а во вторых за счет малой вероятности поражения при срабатывании по цели испытуемого образца ракетно-артиллерийского вооружения, или атакующего боеприпаса-агрессора, вследствие относительно малых размеров и рассредоточенности отдельных БПЛА в пространстве.
Изобретение поясняется следующей графической информацией.
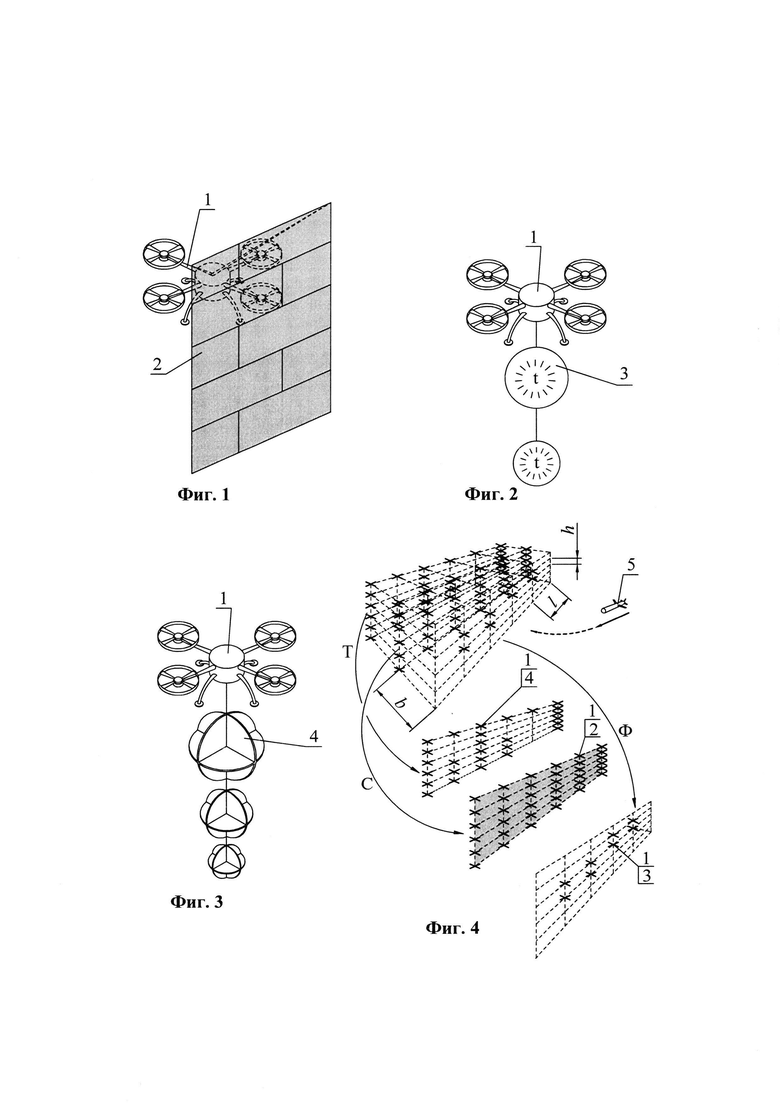
На фиг. 1 представлен пример транспортирования БПЛА (квадракоптером) фрагмента визуального изображения имитируемого объекта - части стеновой конструкции здания.
На фиг. 2 - транспортирования имитаторов тепловой сигнатуры.
На фиг. 3 - транспортирования имитаторов радиолокационного облика - группы уголковых отражателей.
Для упрощения изображений конструкции устройств подвеса устройств-имитаторов на фиг. 1…3 условно не показаны.
На фиг.4 схематично представлен фрагмент пространственного построения БПЛА при имитировании промышленного объекта.
При осуществлении способа отдельные БПЛА 1 в соответствии с полетной программой, обеспечивающей компьютерное управления каждым БПЛА по отдельности, возможность их взаимного перестроения в любых комбинациях и регулировку транспортируемых устройств-имитаторов, транспортируют соответственно фрагменты визуального изображения имитируемого объекта 2 (фиг. 1), имитаторы тепловой сигнатуры 3 (фиг. 2), имитаторы радиолокационного облика 4 (фиг. 3), или иные устройства-имитаторы физических характеристик объекта, например, излучающие сигналы в радио-, акустическом, световом диапазонах.
Группы БПЛА, условно показанные на фиг. 4 знаком  , несущие разные имитаторы, расположены в вертикальных плоскостях, и эшелонированы друг от друга по глубине фронта на дистанции Ь.
, несущие разные имитаторы, расположены в вертикальных плоскостях, и эшелонированы друг от друга по глубине фронта на дистанции Ь.
Близкорасположенные (соседствующие) БПЛА, находящиеся в пределах каждой отдельной группы, дистанцированы на расстояниях h и l, - соответственно по высоте и ширине построения. Пространственная координатная сетка возможного построения показана штриховыми линиями.
В случае использования разнотипных групп БПЛА, например по массогабаритным характеристикам и грузоподъемности, расстояния h, l в пределах каждой группы и b между группами могут быть различными, в зависимости от взаимного влияния винтомоторных устройств.
Фронтальная группа БПЛА (на иллюстрации обозначена Ф) транспортирует имитаторы тепловой сигнатуры 1, 3, - осуществляется имитация оконных проемов, теплоотводящих воздуховодов, компрессоров кондиционеров и т.п.
Средняя группа БПЛА (на иллюстрации обозначена С) транспортирует фрагменты визуального изображения имитируемого объекта 1, 2, - осуществляется имитация внешнего облика объекта (растрового, но с определенной дистанции воспринимаемого как целое).
Тыловая группа БПЛА (на иллюстрации обозначена Т) транспортирует имитаторы радиолокационного облика (уголковые отражатели) 1, 4, - осуществляется имитация несущих металлических колонн здания, балок перекрытия, крупногабаритного металлоемкого оборудования.
При подлете испытуемого образца ракетно-артиллерийского вооружения 5 (или атакующего вражеского боеприпаса) к сформированной посредством предлагаемого способа пространственной крупногабаритной имитационно-мишенной обстановке, органы его радиолокационного наблюдения, технического зрения, теплового наведения и т.п.воспринимают совокупность имитируемых ею физических характеристик реального объекта. Следствием этого будет изменение изначальной траектории движения приближающегося средства поражения в сторону имитирующей объект мишенной обстановки (ложной цели) с последующим срабатыванием по ней боевой части. А в случае промаха - самоликвидацией или падением.
Таким образом, вышеописанный способ формирования пространственной крупногабаритной имитационно-мишенной обстановки имеет высокую степень имитации реальных объектов, обеспечивает достаточно большое время ее функционирования, а также мобильное управление имитационными характеристиками за счет возможности быстрого изменения полетной программы, обеспечивающей компьютерное управления каждым БПЛА по отдельности, возможность их взаимного перестроение в любых комбинациях, и также регулировку работы несомых ими устройств-имитаторов. Способ пригоден для использования в широком диапазоне географических условий, практически полностью исключает экологическое загрязнение окружающей среды, а также сулит некоторое снижение эксплуатационных расходов.
При проведении учебных стрельб, а также испытаний новых образцов ракетно-артиллерийского вооружения и авиационных средств поражения по мере набора статистических данных его применение ускорит создание максимально автоматизированных систем сбора и обработки информации с как существующих, так и разрабатываемых многоканальных устройств оптико-электронной индикации, обеспечивающих процесс обработки результатов стрельбы в режиме реального времени.
Источники информации, принятые во внимание при оформлении заявки:
1) Патент РФ №2628931, F41J 9/04, 2016 г., Многофункциональная модульная морская мишенная установка - аналог.
2) Патент США №2017219319 Al, F41J 9/10, F41J 2/00, F41G 7/22, H01Q 15/14, 2017 г., Towed, autonomous, or remotely controlled airborne mobile system… - аналог.
3) Патент РФ №2247922, F41H 11/02, F41J 2/00, 2000 г., Ложная цель - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| Мишень-имитатор крупнобагаритной бронетехники | 2023 |
|
RU2805387C1 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| ИМИТАЦИОННО-ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2018 |
|
RU2743497C2 |
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| ПРИВЯЗНОЙ ВОЗДУШНЫЙ ИМИТАТОР ВЕРТОЛЁТА | 2016 |
|
RU2622583C1 |
| Тренажер для отработки навыков взаимодействия операторов средств ближнего боя | 2015 |
|
RU2671460C1 |
| Многоцелевая мишенная установка | 2024 |
|
RU2827536C1 |
| Имитационно-испытательный комплекс полунатурного тестирования радиолокационной станции | 2019 |
|
RU2715060C1 |
| Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации | 2019 |
|
RU2726026C1 |
Изобретение относится к вооружению и военной технике, а именно к мишенным обстановкам, способам защиты объектов и может быть использовано при проведении испытаний новых образцов ракетно-артиллерийского вооружения и авиационных средств поражения, а также для решения задач в военное время для создания ложных целей. Для формирования пространственной крупногабаритной имитационно-мишенной обстановки создают ее временное изображение посредством размещения в воздушном пространстве множества отдельных устройств-имитаторов физических характеристик реального объекта. При этом устройства-имитаторы размещаются в воздушном пространстве в виде соответствующих раздельно транспортируемых устройств на совокупности беспилотных летательных аппаратов, например квадрокоптерах, эшелонированных по высоте, ширине и глубине фронта в соответствии со структурой имитируемого реального объекта. Обеспечивается высокая степень имитации реального объекта, увеличение времени функционирования мишенной обстановки, обеспечение мобильного управления ее имитационными характеристиками, исключение экологического загрязнения окружающей среды. 4 ил.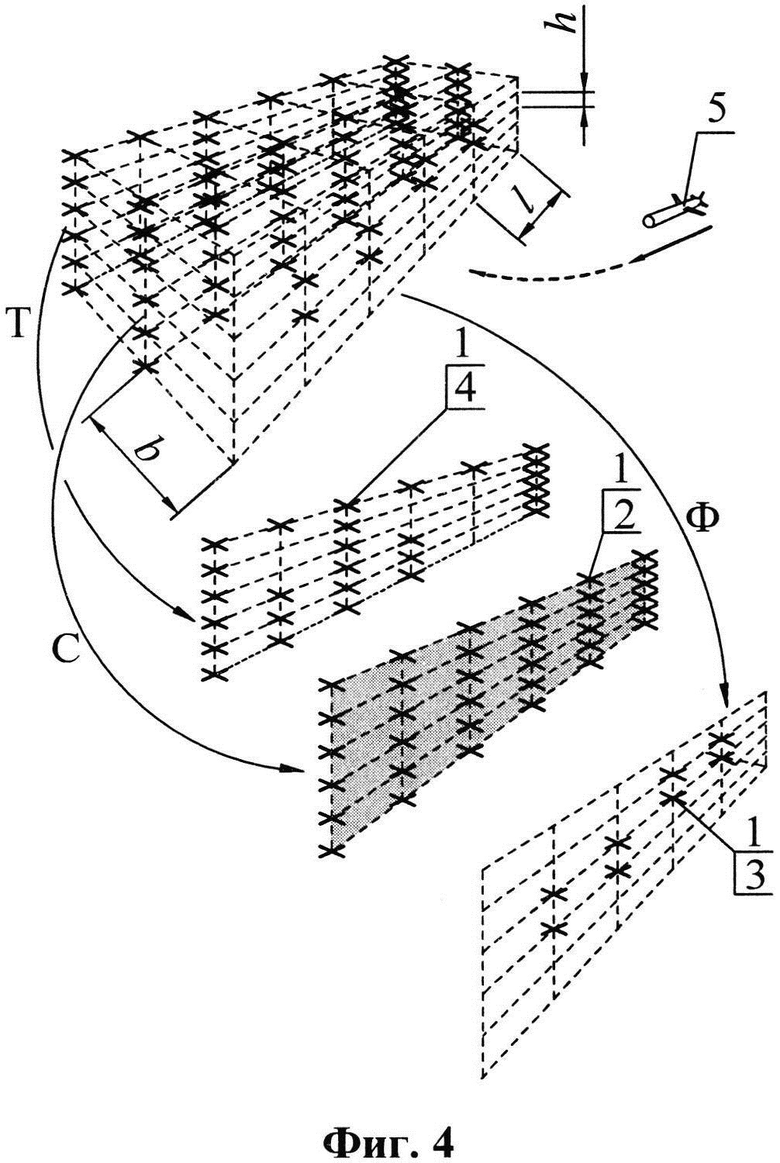
Способ формирования пространственной крупногабаритной имитационно-мишенной обстановки путем создания ее временного изображения посредством размещения в воздушном пространстве множества отдельных устройств-имитаторов физических характеристик реального объекта, отличающийся тем, что устройства-имитаторы размещаются в воздушном пространстве в виде соответствующих раздельно транспортируемых устройств на совокупности беспилотных летательных аппаратов, например квадрокоптерах, эшелонированных по высоте, ширине и глубине фронта в соответствии со структурой имитируемого реального объекта.
| ЛОЖНАЯ ЦЕЛЬ | 2000 |
|
RU2247922C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 5495562 A, 27.02.1996. | |||

