Данное изобретение касается аппликатора для нанесения и тиснящего микропрофилирования текучей среды на основе и, в частности, для нанесения и тиснящего микропрофилирования текучей среды в аэрокосмической промышленности, причем этот аппликатор содержит приводимую во вращательное движение матрицу с тиснильным профилем, прижимное средство для этой матрицы и стабилизирующее устройство, в частности, отверждающее устройство для наносимой среды.
Такой аппликатор известен из заявки DE 10 2006 004 644 A1. Этот аппликатор наносит отверждаемый лак на поверхность подложки и при этом производит тиснение на его поверхности, за счет чего лак приобретает микроструктуру. Такая микроструктура лака называется также микробороздками. Аппликатор содержит приводимую во вращательное движение матрицу с тиснильным профилем и роботом прижимается к основе, в частности, к так называемой поверхности подложки и перемещается по ней. Аппликатор содержит накачиваемый повышенным давлением валик, на боковую поверхность которого плотно насажена матрица, которая натягивается за счет давления газа. В валике установлено отверждающее устройство, направленное к области прижатия.
Задачей данного изобретения является предложение улучшенной технологии нанесения.
Изобретение решает эту задачу с помощью признаков, приведенных в независимых пунктах формулы изобретения.
Предлагаемая изобретением технология нанесения, т.е. аппликатор и способ нанесения, а также наносящее устройство обладают различными преимуществами. С помощью такой технологии нанесения текучая среда, например, отверждаемый лак может наноситься в пределах узких допусков для толщины слоя и для создаваемой тиснением микроструктуры. Долговечность нанесенной среды и техническое, соответственно, физическое действие микроструктуры могут быть существенно улучшены. Такая микроструктура на лаке может, например, обеспечить пониженное сопротивление воздуха на обшивке летательного аппарата и значительную экономию топлива. Чем точнее может быть задана и реализована такая микроструктура, тем выше достигаемые результаты.
Аппликатор с полым опорным элементом обеспечивает улучшенное и более точное размещение и направление матрицы, благодаря чему реализуемое с помощью матрицы нанесение текучей среды улучшается. В частности, могут быть образованы точные краевые кромки наложенной полосами текучей среды. Это обеспечивает оптимальное примыкание соседних наносимых полос.
Предлагаемый изобретением аппликатор в области прижатия матрицы к основе обеспечивает также одинаковое прижимное усилие. Может предотвращаться выдавливание лака по краям матрицы, причем образуются также упомянутые острые кромки по краю матрицы. Аппликатор обеспечивает также существенно улучшенную подгонку матрицы по форме в области прижатия к контуру основы, который во многих случая отличается от ровного. В частности, выпуклые и вогнутые выгибы основы могут быть скомпенсированы и равномерно покрыты тисненой средой. Такие контуры имеются, например, на летательных аппаратах и их внешней обшивке в области фюзеляжа и на несущих поверхностях.
В предлагаемом изобретением аппликаторе матрица обладает более высокой стойкостью и долговечностью, чем в уровне техники. Тиснильное профилирование может быть расположено на наружной стороне материала матрицы. В порядке альтернативы оно может быть выполнено на тонкостенной и изгибно-упругой оболочке на наружной стороне матрицы. Такая оболочка, например, в форме пленки может придавать значительно большую стойкость и может быть выполнена, например, из стекла или иного подходящего материала. Это тоже ведет к повышению долговечности матрицы. Матрица при необходимости может быть тоже выполнена в виде тонкостенного, изгибно-упругого стеклянного тела с тиснильным профилированием. Кроме того, матрица при необходимости может заменяться.
Выполнение аппликатора с опорным элементом и установленным в промежуточном пространстве прижимным средством дает особые преимущества для точного направления и позиционирования матрицы. Кроме того, упрощается замена матрицы. Она может быть, в частности, автоматизирована.
Аппликатор может содержать встроенное стабилизирующее устройство, обеспечивающее стабилизацию, в частности упрочнение, нанесенной на основу текучей среды и тисненой микроструктуры. Стабилизирующее устройство может быть выполнено, в частности, как отверждающее устройство в различных вариантах. Оно может быть установлено в предпочтительно полом опорном элементе или на нем и оказывать воздействие на только что нанесенную среду в области прижатия матрицы. С помощью соответствующего манипуляционного устройства аппликатор с матрицей может быть приспособлен к основе таким образом, что получается обширная область прижатия. В этой области прижатия стабилизирующее устройство оказывает воздействие излучаемым стабилизирующим средством, например, ультрафиолетовым светом и отверждает, например, нанесенную среду. Такая проходящая по поверхности область прижатия может при этом по своей величине, в частности по своей протяженности в направлении процесса или в направлении подачи подгоняться под условия стабилизации, соответственно, отверждения среды. В этой проходящей по поверхности области прижатия матрица своим тиснильным профилем прижимается к основе и к нанесенной среде. При стабилизации, соответственно, отверждении благодаря этому оптимально обеспечивается и фиксируется микроструктура нанесенной среды.
Опорный элемент в предпочтительном варианте выполнения установлен поворотно и при этом в области своей боковой поверхности соединен с матрицей с вращательным замыканием. Соединение с вращательным замыканием (с передачей вращательного движения) может быть создано с помощью прижимного средства, которое предпочтительно выполнено в виде подушки рабочей среды. Прижимное усилие может управляться или регулироваться с помощью управляющего органа. С одной стороны, оно может согласовываться с эксплуатационными требованиями и с благоприятной для процесса формой поверхности прижатия. С другой стороны, оно может быть существенно снижено, чтобы облегчить замену матрицы.
Матрица может приводиться в окружное движение на аппликаторе предпочтительно собственным приводом. Это может быть реализовано опосредованно через привод поворотного опорного элемента и его соединение с матрицей с вращательным замыканием. В порядке альтернативы может быть предусмотрен непосредственный привод матрицы. Посредством собственного привода можно оказывать влияние на окружное движение матрицы дополнительно к вызываемому подачей аппликатора обкатывающему движению матрицы. Для этого привод может соответствующим образом регулироваться или управляться. Такая конструкция привода имеет собственное изобретательское значение, и она может также использоваться в комбинации с обычным аппликатором, например, с аппликатором указанного вначале рода, известным из уровня техники.
В зависимых пунктах формулы изобретения приведены другие предпочтительные варианты осуществления изобретения.
Среди прочего приведены следующие примеры осуществления изобретения:
Пример 1: Аппликатор для нанесения и тиснящего микропрофилирования текучей среды на основе, причем аппликатор содержит приводимую в окружное движение матрицу с тиснильным профилем, прижимное средство для матрицы и стабилизирующее устройство, в частности, отверждающее устройство для нанесенной среды, причем этот аппликатор имеет полый опорный элемент, который с зазором окружен матрицей с образованием промежутка, причем прижимное средство установлено в этом промежутке.
Пример 2: Аппликатор согласно примеру 1, у которого стабилизирующее устройство установлено в опорном элементе (27) или на нем.
Пример 3: Аппликатор с признаками ограничительной части примера 1 или согласно примеру 1 или 2, причем этот аппликатор содержит собственный привод для приведения матрицы в окружное движение.
Пример 4: Аппликатор согласно примеру 1, 2 или 3, причем этот аппликатор имеет подключение для манипуляционного устройства, в частности для промышленного робота.
Пример 5: Аппликатор согласно любому из предыдущих примеров, у которого опорный элемент выполнен трубчатой формы и имеет геометрически устойчивую боковую поверхность.
Пример 6: Аппликатор по любому из предыдущих примеров, у которого опорный элемент установлен на раме аппликатора поворотно и соединен с матрицей с вращательным замыканием.
Пример 7: Аппликатор по любому из предыдущих примеров, у которого опорный элемент связан с приводом.
Пример 8: Аппликатор по любому из предыдущих примеров, у которого привод выполнен с возможностью управления или регулирования.
Пример 9: Аппликатор по любому из предыдущих примеров, у которого прижимное средство выполнено в виде деформируемой и заполняющей промежуток подушки рабочей среды.
Пример 10: Аппликатор по любому из предыдущих примеров, у которого подушка рабочей среды содержит сжатую текучую среду, в частности, сжатый газ в герметизирующей, изгибно-упругой оболочке.
Пример 11: Аппликатор по любому из предыдущих примеров, у которого подушка (33) рабочей среды, в частности, оболочка соединена с опорным элементом и с матрицей без возможности проворачивания.
Пример 12: Аппликатор по любому из предыдущих примеров, у которого прижимное средство, в частности, подушка рабочей среды содержит управляющее средство для управления или регулирования внутреннего прижимного усилия на матрицу.
Пример 13: Аппликатор по любому из предыдущих примеров, у которого матрица выполнена в виде изгибно-упругого бесконечного кольцевого полотна.
Пример 14: Аппликатор по любому из предыдущих примеров, у которого тиснильный профиль расположен на наружной стороне материала матрицы или на внешней оболочке (внешнем покрытии) матрицы.
Пример 15: Аппликатор по любому из предыдущих примеров, у которого стабилизирующее устройство излучает стабилизирующее средство, причем боковая поверхность опорного элемента, прижимное средство и матрица являются проницаемыми для этого стабилизирующего средства.
Пример 16: Аппликатор по любому из предыдущих примеров, у которого стабилизирующее устройство выполнено как источник света, в частности УФ-лампа, а стабилизирующее средство представляет собой свет, в частности УФ-свет.
Пример 17: Аппликатор по любому из предыдущих примеров, причем этот аппликатор, в частности, его опорный элемент по краю содержит локальный барьер для излучаемого стабилизирующего средства.
Пример 18: Аппликатор по любому из предыдущих примеров, причем этот аппликатор содержит подводящее устройство для текучей среды.
Пример 19: Аппликатор по любому из предыдущих примеров, у которого текучая среда представляет собой отверждаемый лак.
Пример 20: Аппликатор по любому из предыдущих примеров, причем этот аппликатор содержит устройство для очистки.
Пример 21: Наносящее устройство для нанесения и тиснящего микропрофилирования текучей среды на основе, причем это наносящее устройство содержит аппликатор и манипуляционное устройство для создания относительного движения между аппликатором и обрабатываемой деталью, причем аппликатор выполнен по меньшей мере по одному из примеров 1-20.
Пример 22: Наносящее устройство согласно примеру 21, у которого манипуляционное устройство выполнено и управляется таким образом, что оно перемещает аппликатор вдоль основы и при этом прижимает его к основе с таким усилием, что приводимая в окружное движение матрица в области прижатия деформируется и прилегает по поверхности к основе и ее контуру.
Пример 23: Наносящее устройство согласно примеру 21 или 22, у которого манипуляционное устройство содержит многоосный программируемый промышленный робот, в частности, робот с шарнирно-сочлененной конструкцией манипулятора.
Пример 24: Наносящее устройство согласно примеру 21, 22 или 23, у которого манипуляционное устройство содержит подвижную несущую конструкцию с одной или несколькими осями перемещения для промышленного робота.
Пример 25: Наносящее устройство по любому из примеров 21-24, причем это наносящее устройство содержит устройство для сбора информации о положении и ориентации аппликатора в ходе процесса и/или для оценки качества процесса, и/или прижимного усилия на основе.
Данное изобретение схематично представлено на прилагаемых чертежах и описано в примерах выполнения. На чертежах показано следующее:
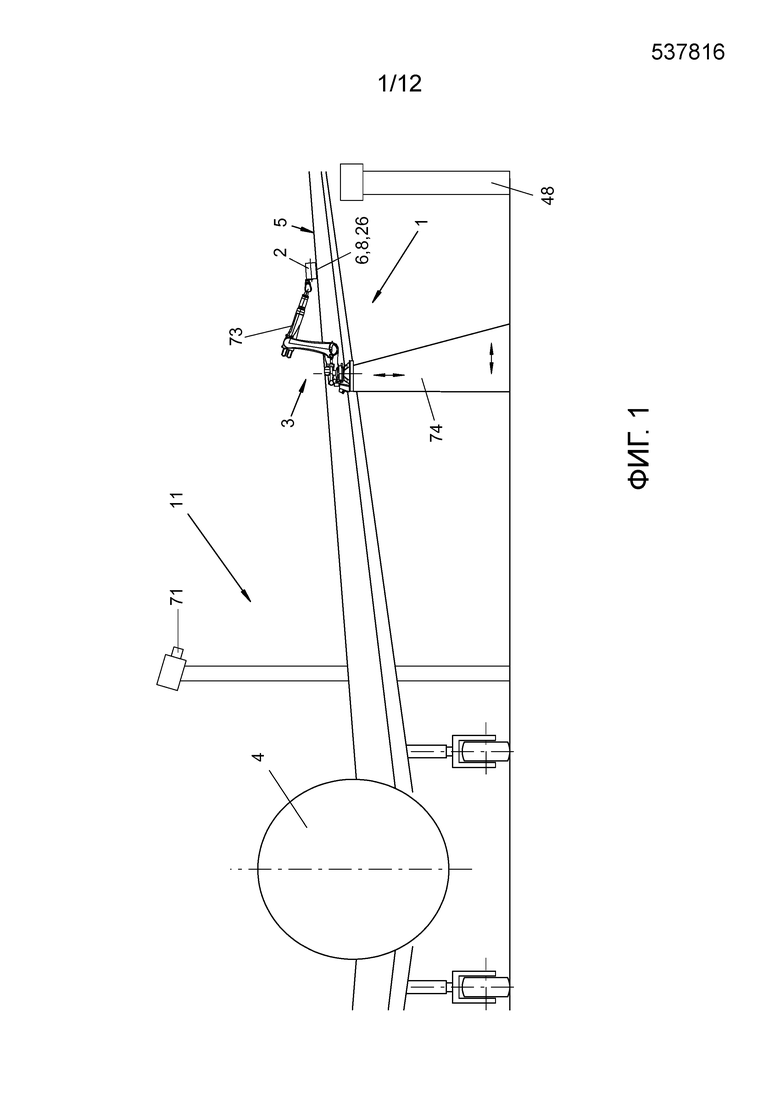
Фиг.1 - схематичный вид спереди летательного аппарата с наносящим устройством и аппликатором,
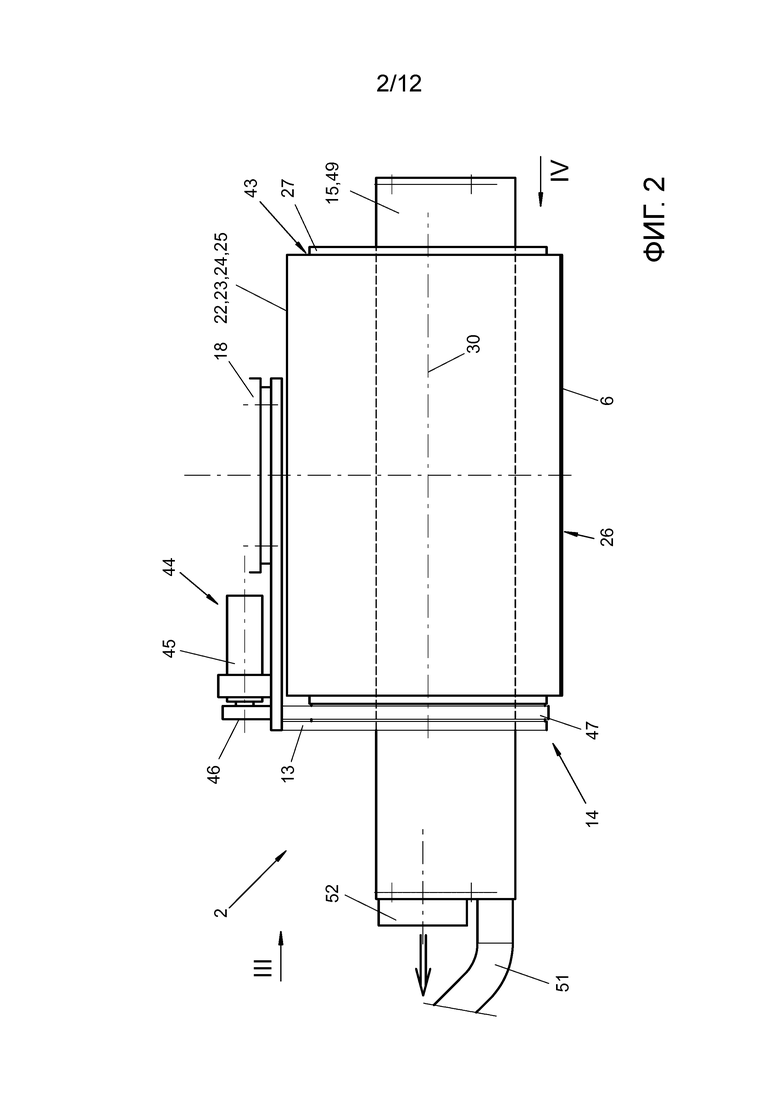
Фиг.2 - схематичный вид сбоку аппликатора,
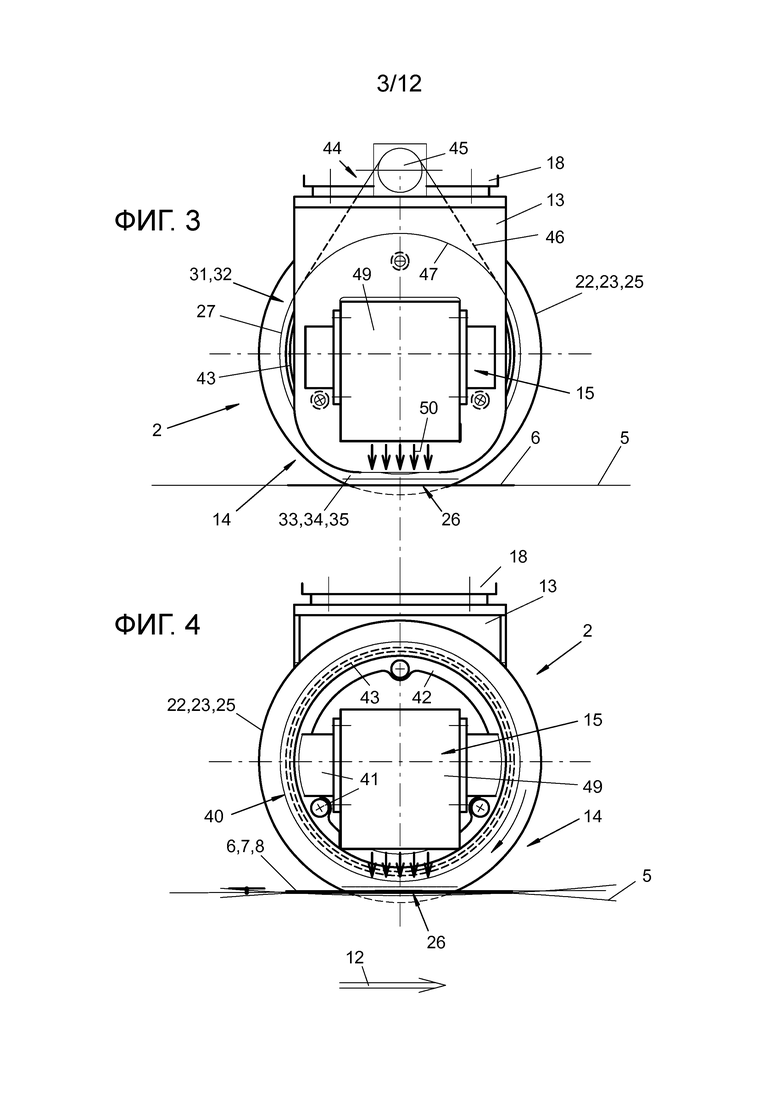
Фиг.3 и 4 - виды с торца аппликатора по стрелкам III и IV на Фиг.2,
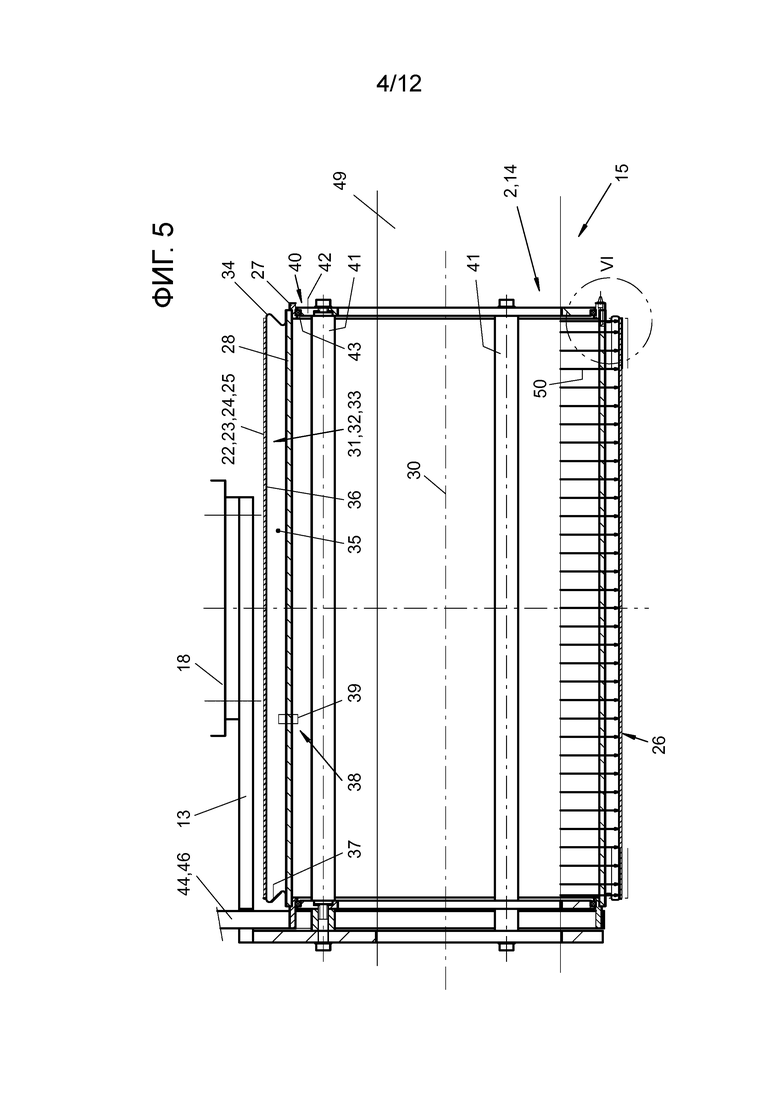
Фиг.5 - продольное сечение аппликатора по Фиг.2,
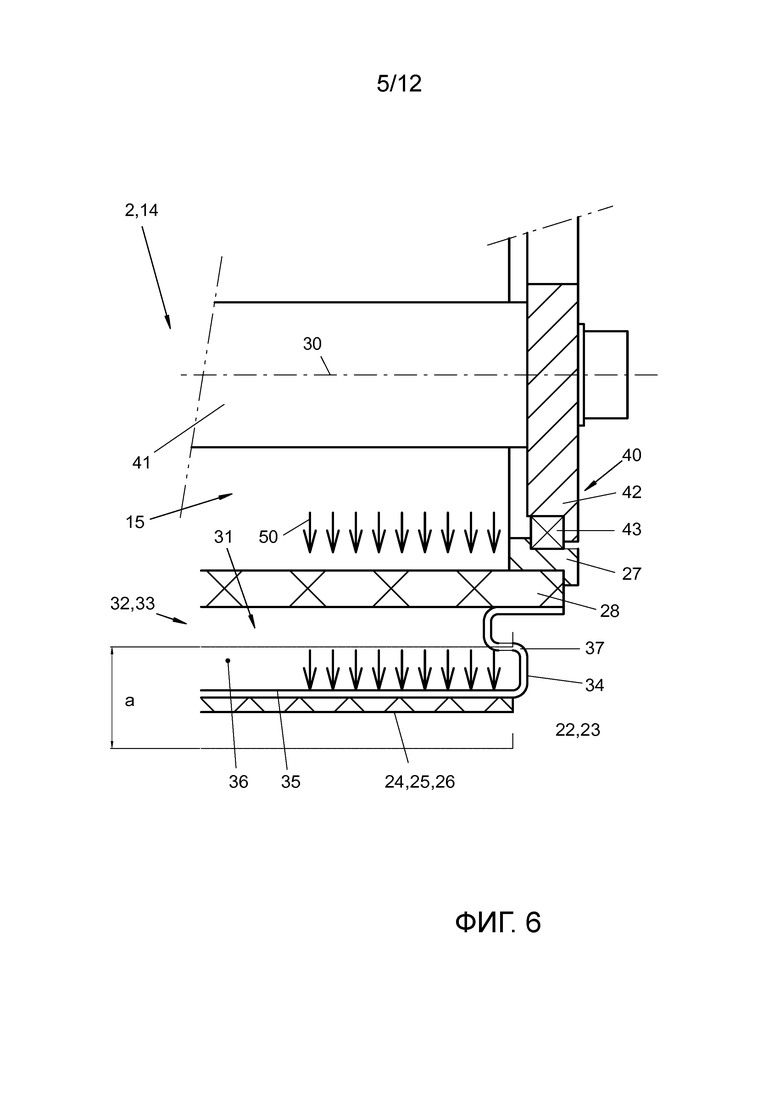
Фиг.6 - оборванный и увеличенный фрагмент VI с Фиг.5,
Фиг.7-10 - схематичные изображения наносимых полос текучей среды и деталей аппликатора,
Фиг.11 - вариант выполнения аппликатора, и
Фиг.12-16 - предпочтительный вариант выполнения аппликатора в различных проекциях.
Данное изобретение касается аппликатора (2) и способа нанесения. Данное изобретение касается также наносящего устройства (1).
Данное изобретение применяется, в частности, в аэрокосмической промышленности. Это касается, в частности, самолетов или иных летательных аппаратов.
Аппликатор (2) служит для того, чтобы наносить текучую среду (6) на основу (5) и при этом подвергать нанесенную среду (6) тиснению, благодаря чему на ее открытой поверхности получается профиль (7). Профиль (7) предпочтительно представляет собой микроструктуру с возвышениями и впадинами, которые могут иметь узкие допуски на отклонение от заданных размеров. Нанесение производится предпочтительно в виде полос, причем аппликатор (2) и основа (5) перемещаются относительно друг друга. Это обеспечивается с помощью манипуляционного устройства (3) наносящего устройства (1).
Текучая среда (6) может быть различной. Она может иметь жидкую или пастообразную, а при необходимости и пенообразную консистенцию и состоять из различных материалов. В показанном примере осуществления текучая среда (6) представляет собой лак, который может состоять из одного или нескольких компонентов. Эта текучая среда (6), в частности, лак могут быть приготовлены в соответствии с DE 10 2006 004 644 A1.
Обрабатываемая деталь (4) и основа (5) тоже могут быть выполнены различным образом. В показанном примере осуществления по Фиг.1 обрабатываемой деталью (4) является самолет. Основой (5) является внешняя обшивка самолета (4). Она может иметь гладкую или выгнутую форму. В показанных примерах осуществления аппликатор (2) и наносящее устройство (1) служат для того, чтобы наносить лак на наружную сторону самолета (4).
Наносимая текучая среда (6) нуждается в стабилизации. Это может быть упрочнение, которое достигается, например, за счет отверждения этой среды (6). В зависимости от вида этой среды (6) и цели ее применения могут применяться и другие формы стабилизации.
Микроструктура (7) на открытой поверхности среды может быть различной и предназначаться для различных целей. Для самолета (4) предпочтительным является ее выполнение по типу кожи акулы. На Фиг.7-10 схематично представлена такая микроструктура (7). Возвышения и углубления могут в виде профиля проходить вдоль направления нанесения, соответственно, вдоль наносимой полосы (8). За счет такой микроструктуры (7), соответственно, микробороздок может быть уменьшено сопротивление воздуха, а тем самым и расход топлива самолета (4).
Аппликатор (2) в показанных примерах осуществления представляет собой инструмент для нанесения текучей среды (6). Для создания упомянутого относительного движения в этих примерах осуществления аппликатор (2) перемещается манипуляционным устройством (3) относительно неподвижной обрабатываемой детали (4). Кинематическая привязка при другом варианте выполнения может быть и обратной. Показанное на Фиг.1 манипуляционное устройство (3) представляет собой, например, многоосный промышленный робот (73), который держит и направляет манипулятор (2) для нанесения среды. Промышленный робот (73) может иметь любое количество и любое расположение осей вращательного и/или поступательного движения и содержать устройство управления роботом (не показано). Предпочтительно промышленный робот (73) выполнен в виде робота с шарнирно-сочлененной конструкцией манипулятора или робота со сгибающейся рукой с пятью или более степенями свободы.
Промышленный робот (73) может быть установлен стационарно. Если обрабатываемые детали (4) имеют большие объемы, то промышленный робот (73) может быть установлен на несущей конструкции (74) или в ней в любом, в частности, в подвешенном и стоячем положении. Несущая конструкция (74) может быть подвижной, причем она имеет одну или более управляемых осей перемещения с соответствующими приводами, как это схематично показано стрелками на Фиг.1. Несущая конструкция (74) может представлять собой, например, перемещаемую по полу подъемную платформу. Подъемная платформа может перемещаться по полу всенаправленно, а также содержать поворотный транспортный механизм, на котором установлено переставляемое по меньшей мере по высоте, а при необходимости и по другим осям подъемное устройство. Такой транспортный механизм может быть выполнен согласно EP 2 137 053 B1 и содержать несколько колес Илона (роликонесущее колесо, позволяющее транспорту двигаться в любом направлении - Mecanum-Rad). Он может быть управляемым и двигаться при дистанционном управлении. В порядке альтернативы он может перемещаться самостоятельно по предварительно запрограммированной траектории и при этом принимать и оценивать мгновенное состояние окружающего траекторию пространства в целях управления, а также для предотвращения столкновений.
Несущая конструкция (74) может быть подвижной, например, по трем пространственным осям поступательного движения. Она может также иметь пространственные оси вращения. Кроме того, она может двигаться вместе с промышленным роботом (73) согласованным образом, причем она, например, подключена к упомянутому управляющему устройству робота или к другому управляющему устройству более высокого уровня.
Наносящее устройство (1), которое в приведенных примерах выполнения образует устройство для нанесения, может содержать устройство (11) для сбора информации, которое может предназначаться для различных целей. Оно может, с одной стороны, предназначаться для точного позиционирования и ориентации аппликатора (2) в ходе процесса и, соответственно, контролировать его. Для этого устройство (11) для сбора информации может, например, содержать показанное на Фиг.1 измерительное устройство (71), которое взаимодействует с одной или несколькими измерительными метками (72), например, так называемыми 6D-пробами (6D-Probes), на аппликаторе (2) и за счет этого определяет положение и ориентацию аппликатора (2) в пространстве во время процесса и во время упомянутого относительного движения. Измерительное устройство (71) может, например, содержать цифровую измерительную камеру или лазерный трекер, или иной подходящий измерительный блок. Измерительное устройство (71) работает предпочтительно бесконтактно и с использованием оптики.
Промышленный робот (73) может быть соединен с аппликатором (2) через реверсивную муфту. Благодаря этому он может по мере необходимости производить замену аппликатора (2) и базировать другой аппликатор (2) или иной инструмент. Наносящее устройство (1), кроме того, может содержать схематично показанное на Фиг.1 устройство (48) для замены матрицы (22) аппликатора (2), которое установлено в рабочей зоне промышленного робота (73) и которое будет подробно описано ниже.
Предпочтительный вариант выполнения аппликатора (2) представлен на Фиг.2-16. Аппликатор (2) содержит наносящее устройство (14) для текучей среды (6) и стабилизирующее устройство (15) для этой среды (6), которое выполнено, например, как отверждающее устройство. Аппликатор (2) может также содержать подводящее устройство (16) для текучей среды (6) и при необходимости устройство (17) для очистки.
Аппликатор (2) содержит раму (13), на которой установлено подключение (18) для соединения с выходным элементом манипуляционного устройства (3), в частности, промышленного робота (73). Рама (13) может быть выполнена как корпус (19) или содержать такой защитный корпус. Рама (13), кроме того, может содержать описываемое ниже и представленное на Фиг.12-16 несущее устройство (20) для компонентов устройства, которое упрощает замену матрицы и делает возможной ее автоматизацию.
Аппликатор (2) содержит приводимую в окружное движение матрицу (22), которая на своей наружной стороне (24) имеет тиснильный профиль (25), посредством которого текучая среда (6) при нанесении на основу (5) с прижимным усилием подвергается механическому тиснению, и получается профиль (7), соответственно, микроструктура. Матрица (22) выполнена как изгибно-упругое и бесконечное кольцевое полотно (23). При этом она предпочтительно выполнена прочной на растяжение и не расширяющейся. Она может быть выполнена из любого подходящего материала, например, из синтетического полимерного материала, в частности, силикона. При нерасширяющемся варианте тиснильный профиль (25) может иметь точно заданное и сохраняющееся в процессе нанесения и тиснения расположение и выполнение. При менее высоких требования по допускам матрица (22) может иметь определенную растяжимость и упругость при удлинении. Замкнутое кольцевое полотно (23) может иметь форму трубы или чехла. В показанных примерах осуществления его поперечное сечение в исходном состоянии имеет вид окружности. В порядке альтернативы возможны и другие формы поперечного сечения, о которых будет сказано ниже.
Тиснильный профиль (25) может быть расположен прямо на наружной стороне (24) матрицы (22), соответственно, кольцевого полотна (23). При этом тиснильный профиль (25) может быть любым подходящим образом заделан в эту наружную поверхность (24). В другом, альтернативном варианте выполнения матрица (22) на наружной стороне (24) может иметь оболочку (покрытие), которая выполнена, например, из стекла или иного устойчивого к любым воздействиям материала и нести указанный тиснильный профиль (25) уже на своей собственной наружной стороне.
Аппликатор (2), в частности, его наносящее устройство (14) содержит, далее, опорный элемент (27), который расположен внутри матрицы (22) с радиальным или поперечно направленным зазором. Матрица (22) окружает опорный элемент (27), причем она охватывает его предпочтительно со всех сторон. За счет упомянутого зазора получается промежуток (31). Аппликатор (2), в частности, наносящее устройство (14) содержит также прижимное средство (32) для матрицы. Прижимное средство (32) находится в этом промежутке (31) и воздействует изнутри на окружающую его матрицу (22), и оказывает на нее прижимное усилие.
При нанесении среды аппликатор (2) прижимается манипуляционным устройством (3), в частности, программируемым промышленным роботом (73) с определенным и регулируемым усилием к основе (5). При этом матрица (22) своей наружной стороной контактирует с основой (5) и деформируется под действием вдавливающего или прижимного усилия. За счет этого она расплющивается в зоне контакта и образует проходящую по поверхности область (26) прижатия. Она плотно прилегает к возможно профилированной основе (5). Такое выполнение показано на Фиг.3 и 4.
Движущаяся в окружном направлении и, в частности, вращающаяся вокруг поперечно направленной оси матрица (22) захватывает тиснильным профилем (25) текучую среду (6) из подводящего устройства (16), совершает окружное или вращательное движение (по стрелке на Фиг.4) к основе (5) и переносит среду в области (26) прижатия на основу (5), при этом также происходит тиснение профиля (7) под воздействием вдавливающего или прижимного усилия. При упомянутом относительном движении с обозначенным на Фиг.4 стрелкой направлением процесса или направлением подачи приводимая в окружное движение матрица (22) обкатывается по основе (5) при продвижении вперед. В области (26) прижатия осуществляется также стабилизация наносимой и профилируемой среды (6) посредством описываемого ниже стабилизирующего устройства (15).
Указанное окружное движение матрицы (22) создается за счет относительного движения, соответственно, продвижения вперед в направлении (12) процесса вследствие контакта при наличии трения и обкатывания по основе (5). В показанных и предпочтительных вариантах выполнения аппликатор (2) дополнительно имеет собственный привод (44) для вращательного движения матрицы (22). Привод (44) является управляемым или регулируемым и тоже может быть соединен с упомянутым управляющим устройством, в частности, с управляющим устройством робота. В показанных вариантах выполнения опорный элемент (27) опорой (40) поворотно установлен на раме (13) манипулятора (2). Опорный элемент (27) соединен с матрицей (22) с вращательным замыканием. Такое соединение с вращательным замыканием может быть образовано, например, за счет подробно описанного ниже прижимного средства (32). В показанных примерах осуществления привод (44) связан с опорным элементом (27), так что матрица (22) приводится в действие опосредованно и за счет соединения с вращательным замыканием вовлекается во вращение при вращении опорного элемента (27).
Как поясняется на Фиг.2-6, опорный элемент (27) в показанных вариантах выполнен трубчатой формы и имеет геометрически устойчивую боковую поверхность (28). Опорный элемент (27) при этом предпочтительно имеет цилиндрическую форму с круговым поперечным сечением, при этом он вращается вокруг неподвижной относительно рамы центральной оси (30). Геометрически устойчивая боковая поверхность (28) может поддерживать прижимные усилия, оказываемые на матрицу (22) прижимным средством (32).
Опорный элемент (27) выполнен предпочтительно полым и имеет вышеупомянутую предпочтительную цилиндрическую или трубчатую форму. Внутри полого опорного элемента (27) размещается стабилизирующее устройство (15). Оно излучает стабилизирующее средство (50) в область (26) прижатия на только что нанесенную там текучую среду (6). В показанных примерах осуществления представляющая собой лак среда (6) отверждается. Стабилизирующее устройство (15) содержит для этого источник (49) света, являющийся, например, УФ-лампой. Стабилизирующее средство (50), соответственно, показанные стрелками световые лучи пронизывают боковую поверхность (28) опорного элемента (27), промежуток (31) с прижимным средством (32) и матрицу (22), которые выполнены соответственно светопроницаемыми.
Свет (50), излучаемый в направлении основы (5), воздействует предпочтительно на всю или по меньшей мере на большую часть поверхности (26) прижатия и отверждает находящуюся между матрицей (22) и основой (5) текучую среду (6). За счет поверхности (26) прижатия при относительном движении в направлении (12) подачи оказывается длительное воздействие стабилизирующим средством (50), которое обеспечивает достаточную стабилизацию, в частности, упрочнение среды (6) и профиля, соответственно, микроструктуры (7). Дальнейшая стабилизация, в частности, упрочнение, соответственно, отверждение после нанесения среды может происходить на воздухе.
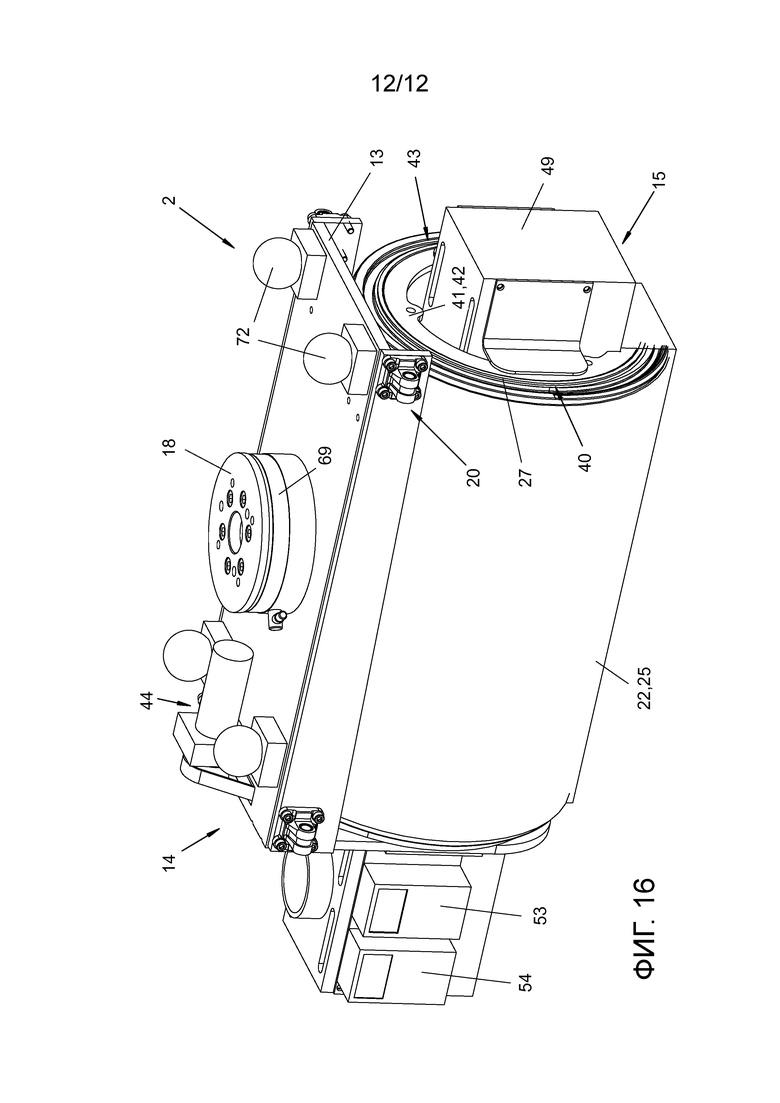
Стабилизирующее устройство (15), в частности, источник света (49) может быть установлен в полом опорном элементе (27). При этом он может быть жестко связан с рамой (13). Но он может также аксиально выступать с одной или с обеих торцевых сторон опорного элемента (27). Стабилизирующее устройство (15), в частности, источник (49) света подсоединен к источнику (51) электропитания. Он может иметь также устройство (52) для удаления отходов, например, образующегося при отверждении озона. Устройство (52) для удаления отходов может содержать, например, вытяжку. Источник (51) электропитания и устройство (52) для удаления отходов могут быть связаны с соответствующим вспомогательным оборудованием на промышленном роботе (73) или в другом месте. Для управления стабилизирующим устройством (15), в частности, источником (49) света могут быть предусмотрены различные измерительные и управляющие приборы. Например, может иметься измеритель (53) влажности, в частности, гигрометр и термометр (54). Они показаны на фиг.12-16, иллюстрирующих конструктивные варианты выполнения аппликатора (2).
Прижимное средство (32) может быть реализовано различным образом. Оно расположено, например, в кольцевом промежутке (31) между боковой поверхностью (28) опорного элемента (27) и матрицей (22), соответственно, кольцевым полотном (23). В показанных примерах осуществления прижимное средство (32) реализовано как деформируемая и заполняющая промежуток (31) подушка (33) рабочей среды. Подушка (33) рабочей среды может быть выполнена различным образом. В показанных примерах осуществления она содержит сжатую текучую среду (35) в герметизирующей и изгибно-упругой оболочке (34). Рабочая среда (35) представляет собой, например, сжатый газ, в частности, сжатый воздух. Внутреннее давление в подушке (33) рабочей среды при этом заметно выше, чем давление окружающей среды, так что подушка (33) рабочей среды изнутри оказывает прижимное усилие на охватывающую ее матрицу (22).
Подушка (33) рабочей среды связана с опорным элементом (27) и с матрицей (22) без возможности проворачивания. За счет этого приводное и вращательное движение привода (44) передается опорным элементом (27) через подушку (33) рабочей среды на матрицу (22). Соединение без возможности проворачивания между подушкой (33) рабочей среды и окружающей ее матрицей (22) обеспечивается за счет трения и силового замыкания. В порядке альтернативы или дополнительно за счет соответствующего контурирования контактных поверхностей можно обеспечить и геометрическое замыкание. Такое соединение без возможности проворачивания создается, в частности, посредством оболочки (34) подушки рабочей среды (33).
Как показано на детальных изображениях Фиг.5 и 6, оболочка (34) выполнена в виде рукава. Она состоит из подходящего изгибно-упругого материала, например, из синтетической полимерной пленки. Оболочка (34) является также прочной на растяжение и упругой после растяжения. Прочность на изгиб и, например, толщина стенки матрицы (22), соответственно, кольцевого полотна (23) при этом выше, чем прочность на изгиб оболочки (34).
Оболочка (34) выполнена, например, из кольцевой заготовки, края которой отгибаются и прочно и герметично соединяются с боковой поверхностью (28) опорного элемента (27), например, приклеиваются. Такая рукавная оболочка (34) приобретает за счет этого в исходном состоянии цилиндрическую боковую поверхность чехла (36), который образует периметр оболочки (34). Далее, имеются боковые стенки (37), которые выполнены оптимальными для деформирования. Они изогнуты, например, Z-образно или S-образно, как показано на Фиг.6. В порядке альтернативы или дополнительно соответствующие образования из материала могут иметься в области боковой стенки.
Оболочка (34) и, в частности, боковая поверхность чехла (36) за счет этого могут деформироваться в области (26) прижатия и приближаться к обладающей стабильной формой боковой поверхности (28) опорного элемента (27). Под действием внутреннего давления рабочей среды (35), например, сжатого воздуха оболочка (34) затем снова деформируется наружу. За счет этого получается показанная на Фиг.6 рабочая зона (a). Рабочая зона и определяемая ею ширина распространенной по поверхности области (26) прижатия в направлении (12) подачи может регулироваться и при необходимости управляться посредством создаваемых манипуляционным устройством (3) подачи на врезание и прижатия аппликатора (2) и матрицы (22) к основе (5). Это может осуществляться также в зависимости от требуемого времени воздействия стабилизирующего средства (50), например, УФ-света.
На Фиг.3-6 подробно показана опора (40) выполненного в виде валика опорного элемента (27) на раме (13). Для этого во внутреннем пространстве полого опорного элемента (27) размещена опорная конструкция (41), которая жестко соединена с рамой (13) и опирается на нее. На опорной конструкции (41) закреплены опорные фланцы (42), которые установлены на торцевых краевых зонах опорного элемента (27) и с наружной стороны несут на себе подшипник (43), например, плоский радиальный подшипник. Он, в свою очередь, соединен с опорным элементом (27). На опорной конструкции (41) может быть, кроме того, закреплено стабилизирующее устройство (15), в частности, источник (49) света и позиционировано на ней жестко или регулируемо.
Вышеупомянутый привод (44) установлен на раме (13). Он содержит двигатель (45), например, электродвигатель и ременную передачу (46) или иное подходящее передаточное средство, которое соединяет шестерню двигателя с рабочим телом (47) на опорном элементе (27). Рабочее тело (47) может быть образовано, например, зубчатым венцом на боковой поверхности по меньшей мере в этой области цилиндрического опорного элемента (27) и расположено предпочтительно на задней краевой области опорного элемента (27).
Прижимное средство (32) может управляться или также регулироваться в своем расширяющем силовом воздействии. Для этого предусмотрено подходящее управляющее средство (38), показанное на Фиг.5. В представленном варианте выполнения прижимного средства (32) с подушкой (33) рабочей среды управляющее средство (38) может содержать регулируемый клапан (39) и источник рабочей среды (не показан). Кроме того, рабочая среда (35), в частности, сжатый газ может подводиться или выпускаться. Путем подвода желаемым образом повышается внутреннее давление. Текучая, в частности, газообразная рабочая среда (35) при этом предпочтительна потому, что в области (26) прижатия возникает постоянное давление и обеспечиваемое этим постоянное прижимное усилие. Если матрица (22), соответственно, тиснильный профиль (25) выполнены замкнутыми, то матрица (22) может заменяться. Для этого, например, выпускается рабочая среда (35), и внутреннее давление подушки (33) рабочей среды уменьшается, так что с вышеупомянутого устройства (48) для замены может быть стянута имеющаяся матрица (22), и на него может быть натянута и насажена новая матрица (22).
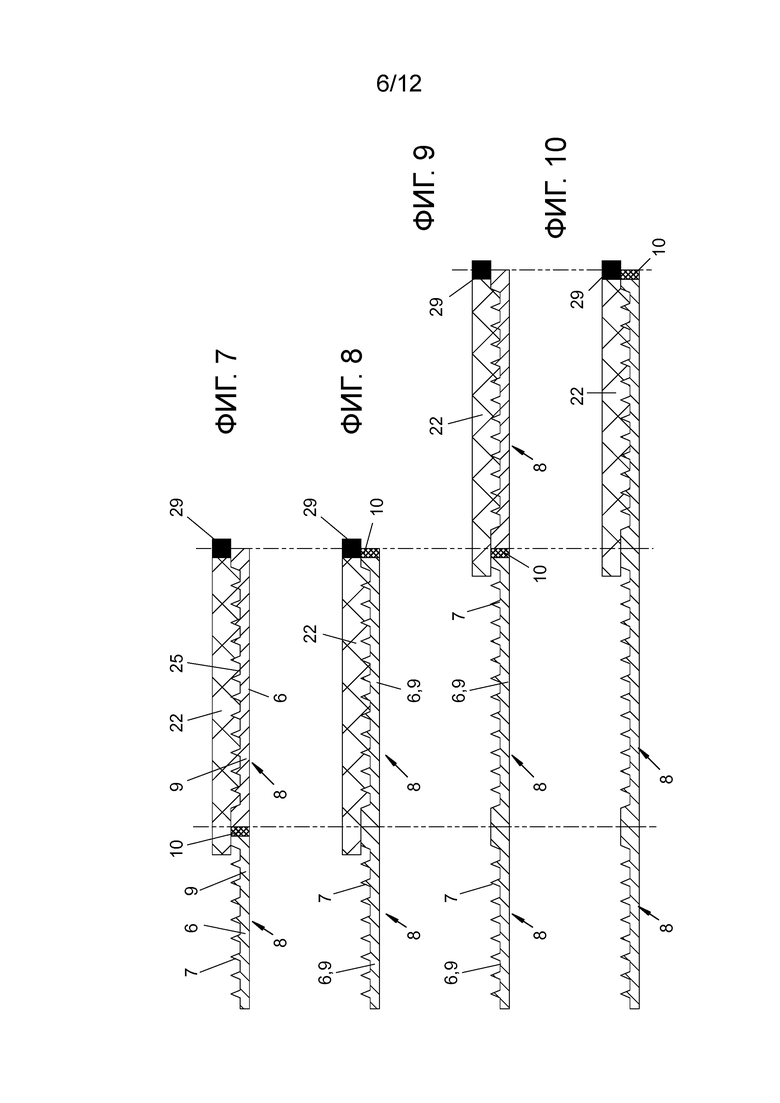
На Фиг.7-10 проиллюстрировано нанесение среды в несколько этапов, причем изображения оборваны. Наносимые полосы (8) располагаются на основе (5) точно параллельно и на определенном расстоянии друг от друга. Наносимые полосы (8) при этом могут полностью или частично стабилизироваться по своей ширине при нанесении. На Фиг.7 и 8 проиллюстрирован также тот случай, когда ширина матрицы (22) может быть больше, чем ширина наносимой полосы (8), причем тиснильный профиль (25) тоже проходит только по части ширины матрицы. На краевой зоне матрицы (22) может быть по периметру установлен барьер (29), который препятствует прохождению стабилизирующего средства (50), в частности, УФ-света. На противоположной стороне матрица (22) может выступать с боков за тиснильный профиль (25) и за область нанесения. В области барьера (29) текучая среда (6) захватывается матрицей (22) и наносится на основу, но при этом не стабилизируется при нанесении. За счет этого возникает показанная на чертежах неотвержденная область (10), называемая также «мокрой» зоной. В других областях нанесенная текучая среда (6) может стабилизироваться и, в частности, отверждаться, причем здесь возникает показанная на чертежах отвержденная структурированная область (9). Неотвержденная область (10) при нанесении соседней полосы (8) стабилизируется и упрочняется, соответственно, отверждается. Это происходит посредством края матрицы, аксиально противоположного барьеру (29) и выступающего сбоку за тиснильный профиль (25), и выходящего там стабилизирующего средства (50). Одновременно в следующей наносимой полосе (8) снова образуется неотвержденная область (10). При последующем упрочнении эта область (10) плотно связывается с другими предварительно упрочненными структурированными областями (9). Граничащие друг с другом краевые зоны наносимых полос (8) на Фиг.7-10 показаны как возвышения. В порядке альтернативы здесь могут быть углубления.
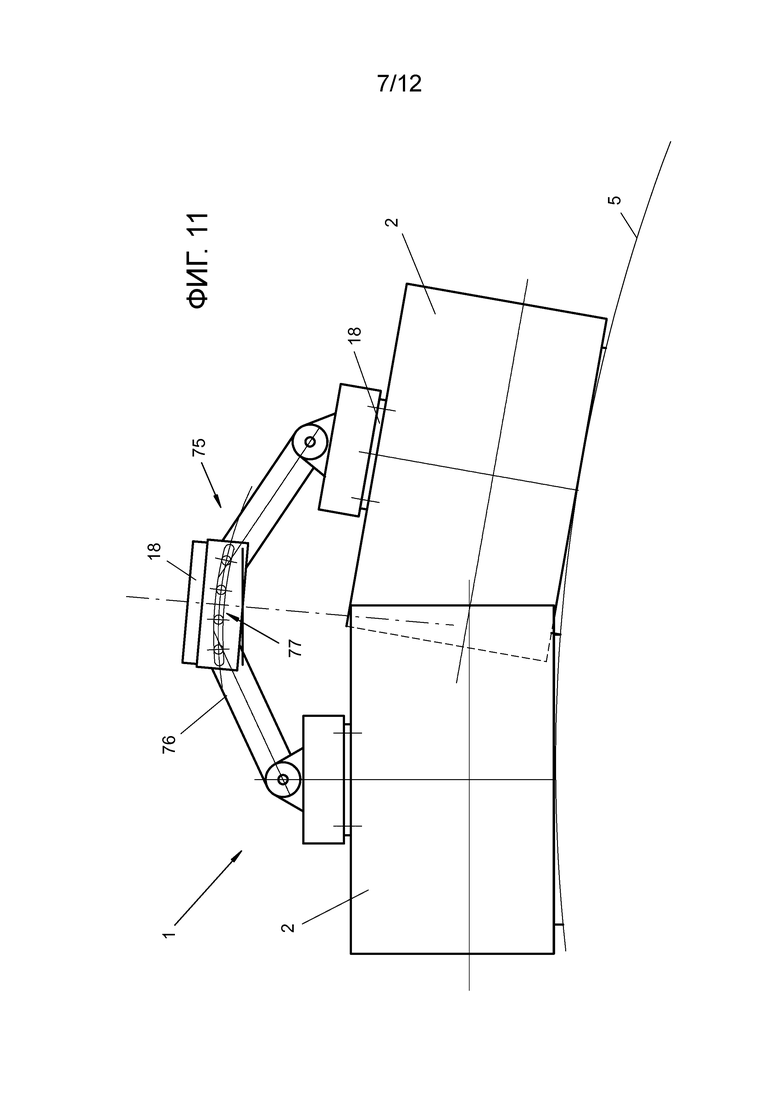
На Фиг.11 показан один вариант выполнения наносящего устройства (1). Здесь два или более аппликаторов (2) установлены в направлении подачи рядом друг с другом и друг за другом со смещением. Они находятся на общем держателе (75), который соединен с манипуляционным устройством (3), в частности, с промышленным роботом (73) посредством подключения (18). Держатель (75) имеет два кронштейна (76) или более, которые с помощью шарнирных соединителей или подобных соединителей на концах связаны с подключением (18) аппликаторов (2). Относительное положение аппликаторов (2) может изменяться с помощью установочного устройства (77) на держателе (75). За счет этого могут быть целенаправленно установлены и по мере необходимости изменены наклон кронштейнов (76) держателя, а при необходимости и промежуток между ними.
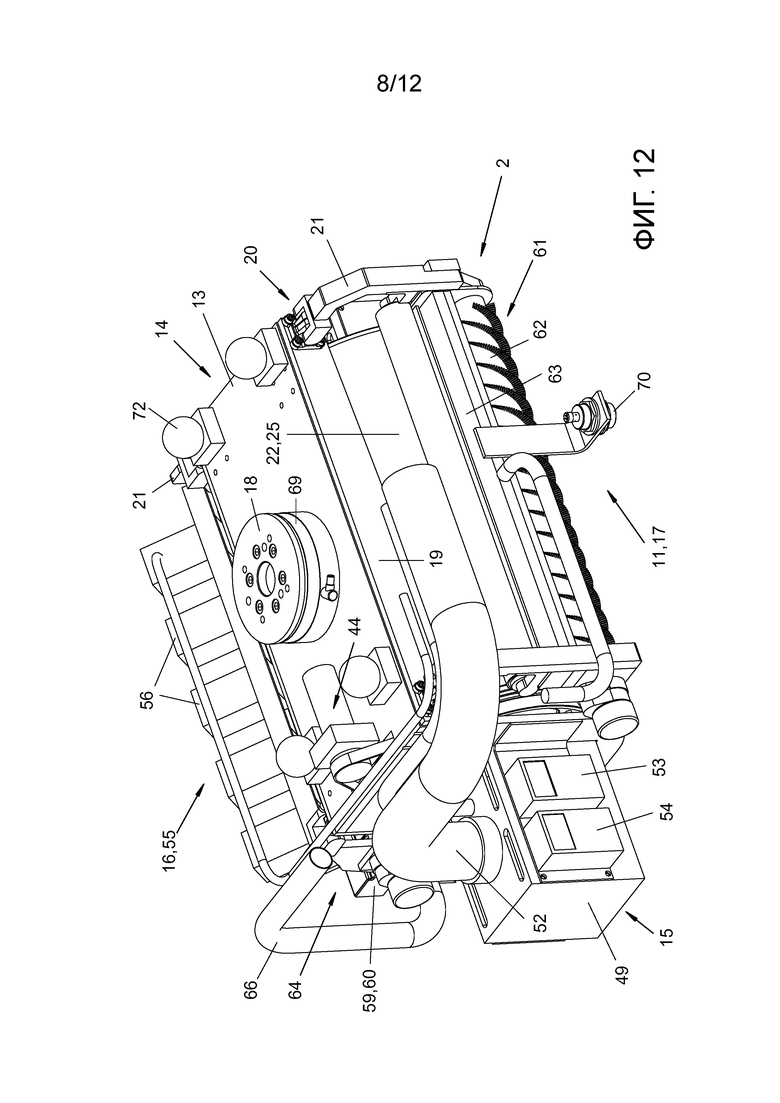
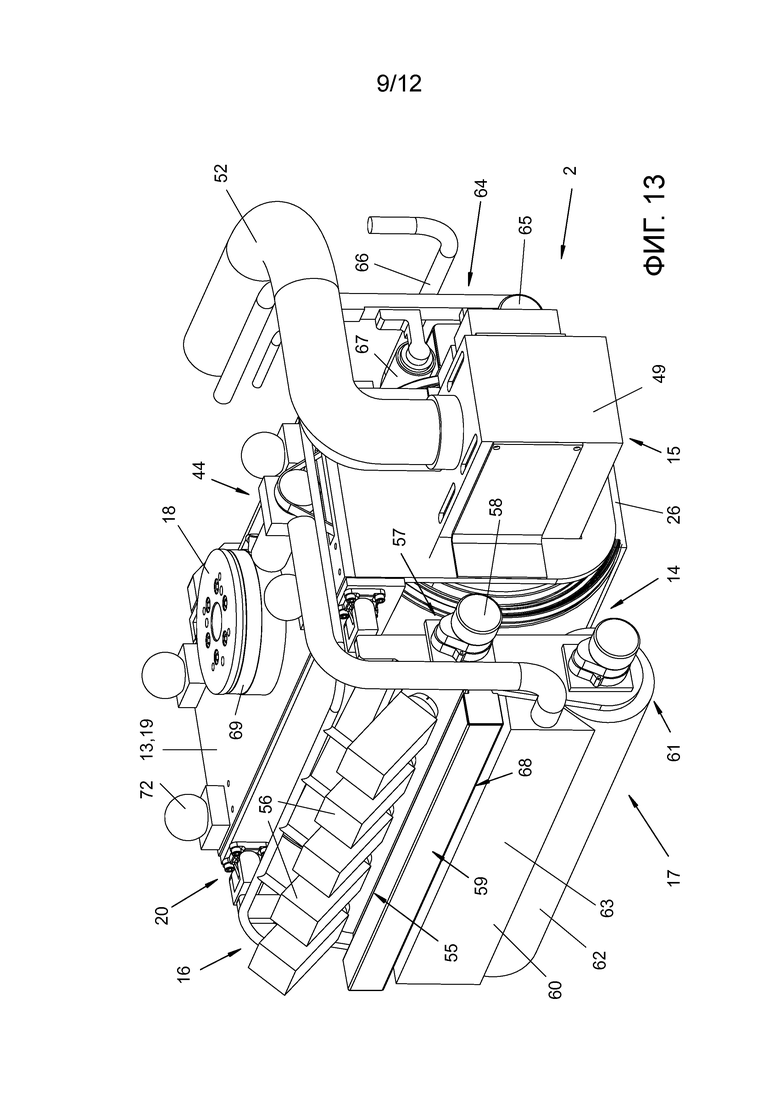
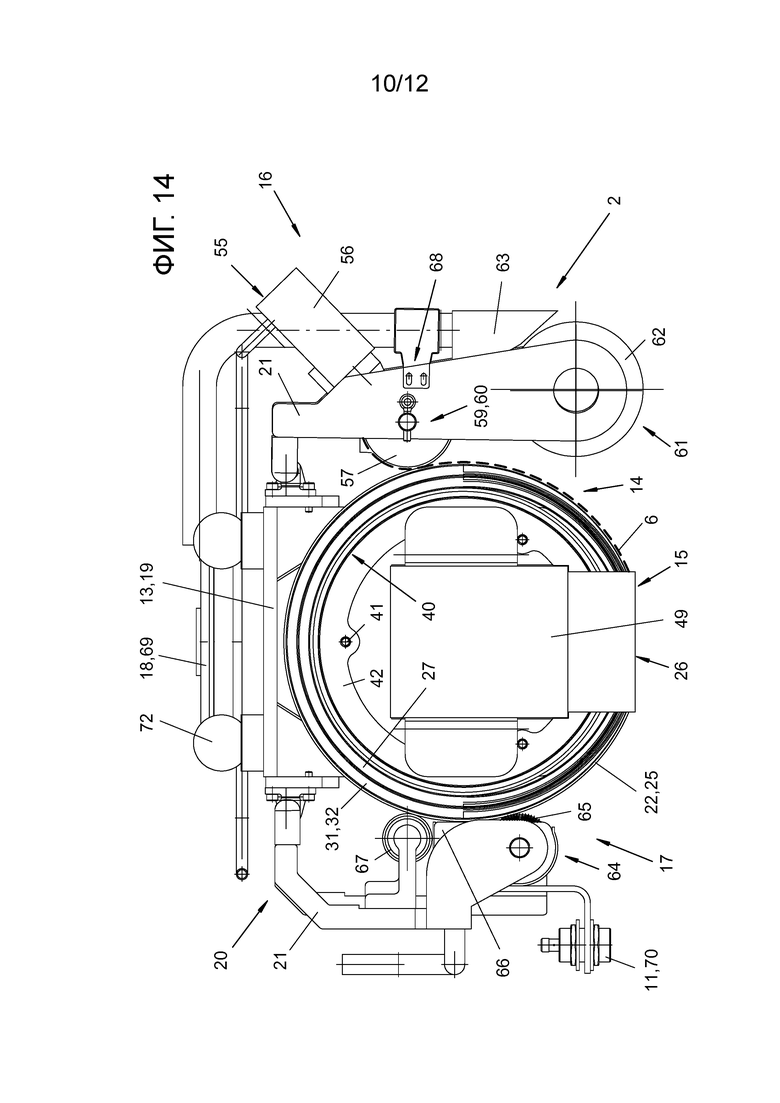
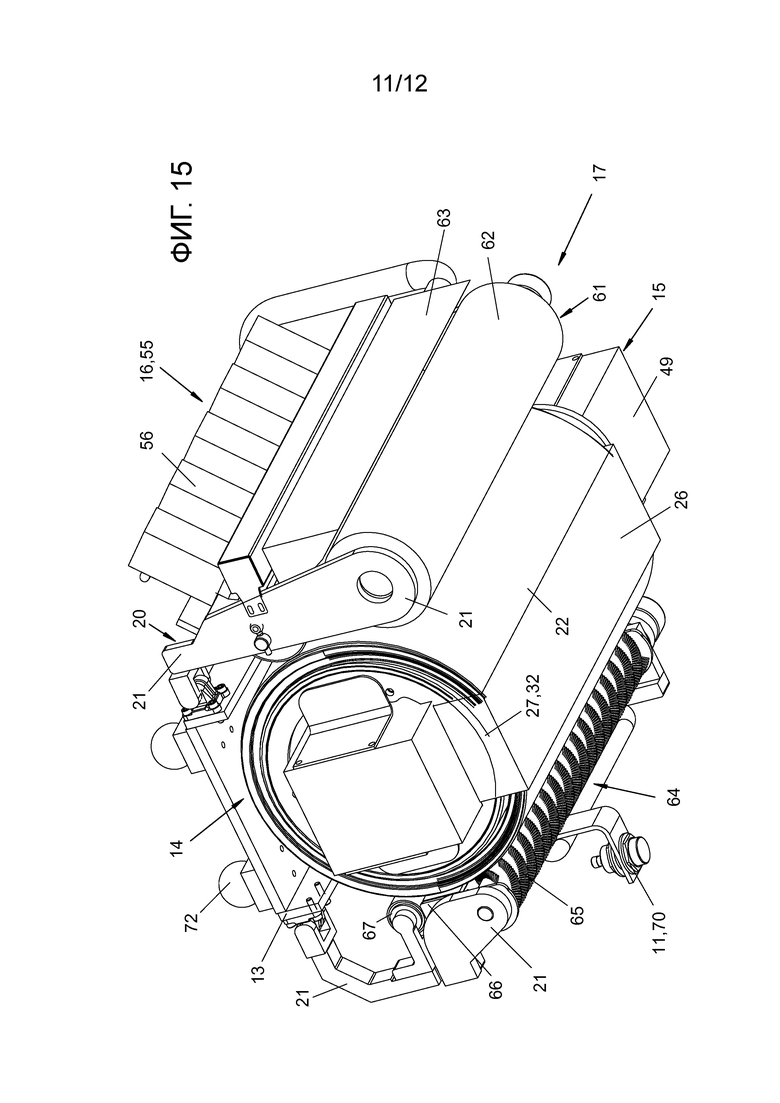
На Фиг.12-16 представлен вариант конструктивного выполнения аппликатора (2). Последний выполнен в соответствии с вышеописанными примерами осуществления по Фиг.2-6. На этих изображениях конструктивного выполнения дополнительно можно видеть подводящее устройство (16) и устройство (17) для очистки.
Подводящее устройство (16) соединено с внешним источником среды (не показан) или может содержать перемещающуюся вместе с ним емкость с запасом среды. Оно содержит дозирующее устройство (55) для нанесения среды. Для этого могут предусмотрены, например, несколько установленных рядами вдоль оси (30) сопел (56) для нанесения, которые выдают регулируемое количество среды. Перенос среды на матрицу (22) может осуществляться с помощью распределительного валика (57), который установлен между соплами (56) для нанесения и матрицей (22) и который снабжен управляемым или регулируемым приводом (58), который, в свою очередь, может быть соединен с вышеназванным управляющим устройством, в частности, с управляющим устройством робота. На Фиг.14 показано это устройство и схематично проиллюстрирована передача текучей среды (6) на матрицу (22) и ее тиснильный профиль (25).
Подводящее устройство (16) может содержать также устройство (59) для удаления отходов, в частности, остатков среды. Оно, например, содержит ракель или иное подходящие счищающее средство, чтобы снимать остатки среды с боковой поверхности распределительного валика (57) и собирать в емкости или подобном приспособлении. Устройство (59) для удаления отходов может также содержать вытяжку (60) или иное средство для отвода остатков среды. Устройство (59) для удаления отходов может также содержать отдельную емкость для среды, в которую при перерывах в процессе среда (6) может отводиться, чтобы избежать преждевременного затвердевания в зоне подвода.
Устройство (17) для очистки может быть выполнено собираемым из нескольких частей. Оно содержит, например, средство (61) для очистки основы (5). Оно состоит, например, из установленной с возможностью вращения щетки (62), которая при необходимости может управляемо или регулируемо приводиться в движение собственным приводом. Щетка (62) может быть связана с устройством (63) для удаления отходов, которое выполнено, например, как вытяжка для улавливаемых частиц загрязнений или т.п. Средство (61) для очистки основы может быть установлено в направлении (12) подачи перед матрицей (22) и под подводящим устройством (16).
Устройство (17) для очистки может также содержать средство (64) для очистки матрицы (22). Оно может быть расположено на задней в направлении (12) подачи стороне аппликатора. Оно содержит, например, подведенную к наружной стороне (24) матрицы (22) щетку (65) в форме валика, которая приводится во вращение с возможностью управления или регулирования. Щетка (65) может быть связана с устройством (66) для удаления отходов, в частности, для удаленных с матрицы (22) остатков среды, например, выполненным в виде вытяжки. Кроме того, над щеткой (65) может быть установлен электростатический ролик (67) или адгезивный ролик, который подводится к матрице (22) с наружной стороны и снимает другие, возможно еще прилипающие частицы среды, и при необходимости соединен с устройством (66) для удаления отходов.
Устройство (17) для очистки может, кроме того, содержать средство (68) для очистки подводящего устройства (16) для среды. Это может быть вышеназванное устройство (59) для удаления отходов или другое устройство.
На Фиг.12-16 дополнительно показаны другие компоненты устройства (11) для сбора информации. Оно содержит, например, датчик (69) нагрузки для определения вдавливающего и прижимного усилий, действующих при нанесении среды. Датчик (69) нагрузки может быть установлен, например, на подключении (18) или в другом подходящем месте, а при необходимости и на промышленном роботе (73). Он может быть выполнен в виде датчика силы/момента. Датчик (69) нагрузки соединен с управляющим устройством, в частности, с управляющим устройством робота.
Устройство (11) для сбора информации может, кроме того, содержать контрольный сенсор (70), используемый, например, для контроля качества наносимой текучей среды (6), а при необходимости и для контроля качества микроструктуры (7). Он может быть установлен на задней в направлении (12) подачи стороне аппликатора и подходящим образом соединен с рамой (13). Этот сенсор (70) выполнен, например, как оптический сенсор, как датчик приближения объекта или иным подходящим образом. Устройство (11) для сбора информации может помимо этого содержать один или несколько дополнительных датчиков для режимов работы или состояний наносящего устройства (1) и его компонентов.
Возможны различные модификации показанных и описанных вариантов выполнения, в частности, признаки рассмотренных примеров осуществления и упомянутых модификаций могут любым образом комбинироваться друг с другом и при необходимости заменять друг друга.
В одном не показанном варианте опорный элемент может быть установлен стационарно и закреплен на раме (13), причем матрица (22) перемещается вокруг этого опорного элемента по типу гусеницы танка. Привод (44) тоже может воздействовать непосредственно на матрицу (22), которая снабжена для этого рабочим телом (47), например, на краю в подходящих опорных точках. Кроме того, стабилизирующее устройство (15) может быть установлено в опорном элементе (27) или на нем. Для этого стационарный опорный элемент (27) соответственно может быть выполнен полым. Прижимное средство (32) при стационарном опорном элементе (27) и перемещающейся вокруг него матрице выполнено соответствующим образом и обеспечивает возможность обкатывающего или окружного движения.
В качестве варианта показанных примеров осуществления рабочая среда (35) может быть и иной, например, другой текучей средой. Она может иметь, например, жидкую или пастообразную консистенцию и представлять собой, например, гель.
Возможны другие варианты и для стабилизации текучей среды (6). Стабилизация, в частности, упрочнение или отверждение могут проводиться и иным образом, например, путем подвода тепла, облучением, под действием переменных электрических полей или др. Стабилизирующее средство (50) будет соответствующим. Тогда соответственно будет изменена и подобрана проницаемость опорного элемента (27), промежутка (31) с прижимным средством (32) и матрицы (22).
Перечень ссылочных обозначений
1 наносящее устройство
2 аппликатор, инструмент для нанесения
3 манипуляционное устройство
4 обрабатываемая деталь, летательный аппарат
5 основа, обшивка летательного аппарата
6 среда, лак
7 микроструктура, профиль
8 наносимая полоса
9 отвержденная структурированная область
10 неотвержденная область, «мокрая» зона
11 устройство для сбора информации
12 направление процесса, направление подачи
13 рама
14 наносящее устройство для среды
15 стабилизирующее устройство, отверждающее устройство
16 подводящее устройство для среды
17 устройство для очистки
18 подключение, робот
19 корпус
20 несущее устройство
21 кронштейн, поворотный рычаг
22 матрица
23 чехол, кольцевое полотно
24 наружная сторона
25 тиснильный профиль, ответный профиль
26 область прижатия
27 опорный элемент, валик
28 боковая поверхность
29 барьер, перекрытие
30 ось
31 промежуток
32 прижимное средство
33 подушка рабочей среды
34 оболочка, рукав
35 рабочая среда, сжатый воздух
36 боковая поверхность чехла, боковая поверхность рукава
37 боковая стенка
38 управляющее средство
39 клапан
40 опора
41 опорная конструкция
42 опорный фланец
43 подшипник, радиальный подшипник
44 привод
45 двигатель
46 ременная передача
47 рабочее тело, зубчатый венец
48 устройство для замены матрицы
49 источник света, УФ-лампа
50 стабилизирующее средство, световой луч
51 источник энергии
52 устройство для удаления отходов, вытяжка
53 измеритель влажности, гигрометр
54 термометр
55 дозирующее устройство
56 сопло для нанесения
57 распределительный валик
58 привод
59 устройство для удаления отходов (остатков среды)
60 вытяжка
61 средство для очистки основы
62 щетка
63 устройство для удаления отходов, вытяжка
64 средство для очистки матрицы
65 щетка
66 устройство для удаления отходов, вытяжка
67 электростатический ролик
68 средство для очистки для подводящего устройства для среды
69 датчик нагрузки, датчик силы/момента
70 сенсор, контрольный сенсор
71 измерительное устройство, измерительная камера, лазерный трекер
72 измерительная метка
73 промышленный робот
74 несущая конструкция
75 держатель
76 кронштейн
77 установочное устройство
a рабочая зона
Группа изобретений касается аппликатора для нанесения и тиснящего микропрофилирования текучей среды (6) на основе (5), в частности, в аэрокосмической промышленности, а также касается соответствующего наносящего устройства с таким аппликатором. Аппликатор (2) содержит приводимую в окружное движение матрицу (22) с тиснильным профилем (25), прижимное средство (32) для матрицы (22) и стабилизирующее устройство (15), в частности отверждающее устройство для нанесенной среды (6). Аппликатор (2) содержит, кроме того, полый опорный элемент (27), который с зазором окружен матрицей (22) с образованием промежутка (31). Прижимное средство (32) расположено в этом промежутке (31) и имеет управляющее средство для управления или регулирования внутреннего прижимного усилия на матрицу (22). Аппликатор может иметь собственный привод (44) для обеспечения окружного движения матрицы (22). Техническим результатом группы изобретений является обеспечение возможности нанесения отверждаемого лака в пределах узких допусков для толщины слоя и для создаваемой тиснением микроструктуры, а также повышение долговечности нанесенной среды и улучшение физического и технического действия микроструктуры, что обеспечивает пониженное сопротивление воздуха на обшивке летательного аппарата и значительную экономию топлива. 2 н. и 13 з.п. ф-лы, 16 ил.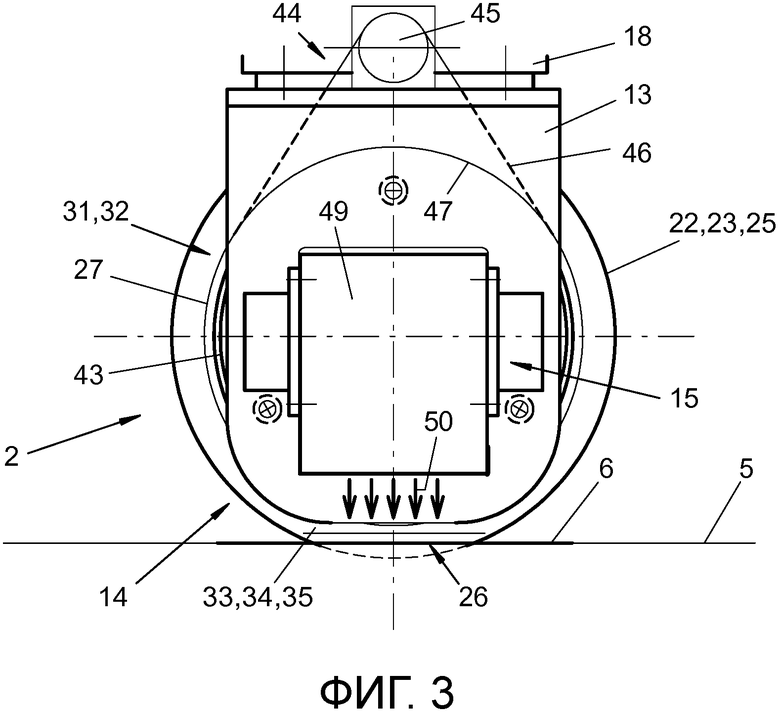
1. Аппликатор для нанесения и тиснящего микропрофилирования текучей среды (6) на основе (5) в аэрокосмической промышленности, причем аппликатор (2) содержит приводимую в окружное движение матрицу (22) с тиснильным профилем (25), прижимное средство (32) для матрицы (22) и стабилизирующее устройство (15), в частности отверждающее устройство, для нанесенной среды (6), отличающийся тем, что аппликатор (2) содержит полый опорный элемент (27), который с зазором окружен матрицей (22) с образованием промежутка (31), причем прижимное средство (32) расположено в этом промежутке (31), причем прижимное средство (32) имеет управляющее средство (38) для управления или регулирования внутреннего прижимного усилия на матрицу (22).
2. Аппликатор по п.1, отличающийся тем, что стабилизирующее устройство (15) установлено в опорном элементе (27) или на нем.
3. Аппликатор п.1 или 2, отличающийся тем, что аппликатор (2) имеет собственный привод (44) для обеспечения окружного движения матрицы (22).
4. Аппликатор для нанесения и тиснящего микропрофилирования текучей среды (6) на основе (5) в аэрокосмической промышленности, причем аппликатор (2) содержит приводимую в окружное движение матрицу (22) с тиснильным профилем (25), прижимное средство (32) для матрицы (22) и стабилизирующее устройство (15), в частности отверждающее устройство, для нанесенной среды (6), отличающийся тем, что аппликатор (2) имеет собственный привод (44) для обеспечения окружного движения матрицы (22), причем прижимное средство (32) имеет управляющее средство (38) для управления или регулирования внутреннего прижимного усилия на матрицу (22).
5. Аппликатор по любому из пп.1-4, отличающийся тем, что этот аппликатор (2) содержит подключение (18) для манипуляционного устройства (3), в частности промышленного робота (73).
6. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что опорный элемент (27) имеет трубчатую форму и геометрически устойчивую боковую поверхность (28).
7. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что опорный элемент (27) поворотно установлен на раме (13) аппликатора (2) и соединен с матрицей (2) с вращательным замыканием.
8. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что опорный элемент (27) соединен с приводом (44).
9. Аппликатор по п.8, отличающийся тем, что привод (44) выполнен с возможностью управления или регулирования.
10. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что прижимное средство (32) выполнено в виде деформируемой и заполняющей промежуток (31) подушки (33) рабочей среды.
11. Аппликатор по п.10, отличающийся тем, что подушка (33) рабочей среды содержит сжатую текучую среду (35), в частности сжатый газ, в герметизирующей изгибно-упругой оболочке (34).
12. Аппликатор по п.10 или 11, отличающийся тем, что подушка (33) рабочей среды, в частности оболочка (34), соединена с опорным элементом (27) и с матрицей (22) без возможности проворачивания.
13. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что матрица (22) выполнена в виде изгибно-упругого бесконечного кольцевого полотна (23).
14. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что тиснильный профиль (25) расположен на наружной стороне (24) материала матрицы или на расположенной с внешней стороны оболочке матрицы (22).
15. Аппликатор по любому из предыдущих пунктов, отличающийся тем, что стабилизирующее устройство (15) выполнено с возможностью излучения стабилизирующего средства (50), причем боковая поверхность (28) опорного элемента (27), прижимное средство (32) и матрица (22) выполнены проницаемыми для стабилизирующего средства (50).
| US 5480596 A, 02.01.1996 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УСТРОЙСТВО ПЫЛЕУЛАВЛИВАНИЯ | 2017 |
|
RU2650922C1 |
| МАШИНА ДЛЯ ВПЕЧАТЫВАНИЯ СРЕДСТВ ЗАЩИТЫ | 1994 |
|
RU2111863C1 |

