Область техники
Настоящее изобретение относится к способу управления и устройству управления блокировкой транспортного средства, которые выполняют управление проскальзыванием для того, чтобы формировать заданное состояние вращения при проскальзывании посредством использования управления перегрузочной способностью блокирующей муфты для блокирующей муфты.
Уровень техники
Традиционно, известно устройство управления силой зацепления для блокирующей муфты, в котором предусмотрен преобразователь крутящего момента, расположенный между двигателем и трансмиссией и имеющий блокирующую муфту, и выполняется управление блокировкой, при котором блокирующая муфта управляется на основе проскальзывания. При этом управлении блокировкой, перегрузочная способность блокирующей муфты постепенно увеличивается, и частота вращения при проскальзывании уменьшается, чтобы за счет этого переключать блокирующую муфту из расцепленного состояния в зацепленное состояние (см., например, публикацию выложенной заявки на патент Японии № 2004-138147).
Задача, решаемая изобретением
Тем не менее, в традиционном устройстве, когда существуют флуктуации нагрузки вспомогательного оборудования двигателя, такого как компрессор кондиционера и генератор переменного тока, во время управления проскальзыванием при управлении блокировкой, крутящий момент двигателя, который вводится в блокирующую муфту, колеблется. Следовательно, возникает такая проблема, что заданное состояние вращения при проскальзывании, которое регулируется при управлении проскальзыванием блокирующей муфты, ухудшается, и управление проскальзыванием не может достигать своей намеченной цели.
С учетом вышеописанных проблем, цель настоящего изобретения заключается в том, чтобы создать способ управления и устройство управления блокировкой транспортного средства, которые предотвращают ухудшение состояния вращения при проскальзывании в результате флуктуаций нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты.
Средство достижения цели
Чтобы достигать цели, описанной выше, настоящее изобретение содержит преобразователь крутящего момента, который имеет блокирующую муфту и который располагается между двигателем и трансмиссией, и вспомогательное оборудование двигателя, которое приводится в действие посредством двигателя.
В этом транспортном средстве, управление проскальзыванием, которое формирует заданное состояние вращения при проскальзывании, выполняется посредством использования управления перегрузочной способностью блокирующей муфты для блокирующей муфты.
Во время управления проскальзыванием блокирующей муфты, выполняется совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя.
Преимущества изобретения
Следовательно, совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя, выполняется во время управления проскальзыванием блокирующей муфты.
Таким образом, когда существуют флуктуации нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты, крутящий момент двигателя, который вводится в блокирующую муфту, колеблется; в силу этого заданное состояние вращения при проскальзывании, которое регулируется при управлении проскальзыванием блокирующей муфты, ухудшается.
Напротив, посредством подавления флуктуаций нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты, подавляются флуктуации в крутящем моменте двигателя, который вводится в блокирующую муфту. Соответственно, перегрузочная способность блокирующей муфты и входной крутящий момент в блокирующей муфте сохраняются во взаимосвязи, которая поддерживает заданное состояние вращения при проскальзывании, даже если существует запрос на флуктуацию нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием.
Как результат, можно предотвращать ухудшение состояния вращения при проскальзывании в результате флуктуаций нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты.
Краткое описание чертежей
Фиг. 1 является общим системным видом, иллюстрирующим оснащенное двигателем транспортное средство, к которому применяются способ управления и устройство управления блокировкой согласно первому варианту осуществления.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса совместного управления блокирующей муфтой и компрессором кондиционера, который выполняется в модуле CVT-управления по первому варианту осуществления.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса совместного управления блокирующей муфтой и генератором переменного тока, который выполняется в модуле CVT-управления по первому варианту осуществления.
Фиг. 4 является временной диаграммой, иллюстрирующей соответствующие характеристики продольной составляющей G/величины APO открытия позиции педали акселератора/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/нагрузки переменного тока/крутящего момента Te двигателя/значения команды управления блокировкой (значения LU-команды), когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по сравнительному примеру.
Фиг. 5 является временной диаграммой, иллюстрирующей соответствующие характеристики продольной составляющей G/величины APO открытия позиции педали акселератора/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/нагрузки переменного тока/крутящего момента Te двигателя/значения команды управления блокировкой (значения LU-команды), когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по первому варианту осуществления.
Фиг. 6 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/частоты вращения при проскальзывании/гидравлического LU-давления (значения LU-команды), описывающие один пример управления распознаванием перегрузочной способности в режиме движения накатом.
Фиг. 7 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/сигнала крутящего момента двигателя/частоты вращения двигателя/частоты вращения турбины/гидравлического LU-давления (значения LU-команды), описывающие операцию, чтобы предотвращать LU-отклонение вследствие флуктуаций нагрузки переменного тока во время распознавания перегрузочной способности в режиме движения накатом по первому варианту осуществления.
Фиг. 8 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/дифференциального LU-давления/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/продольной составляющей G/крутящего момента Te двигателя/нагрузки переменного тока, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед расцеплением муфты, во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) по сравнительному примеру.
Фиг. 9 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/дифференциального LU-давления/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/продольной составляющей G/крутящего момента Te двигателя/нагрузки переменного тока, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед расцеплением муфты, во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) по первому варианту осуществления.
Подробное описание вариантов осуществления изобретения
Ниже описывается предпочтительный вариант осуществления для реализации способа управления и устройства управления блокировкой транспортного средства настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
Сначала описывается конфигурация.
Способ управления и устройство управления блокировкой в первом варианте осуществления применяются к оснащенному двигателем транспортному средству, оснащенному преобразователем крутящего момента и бесступенчатой трансмиссией (CVT). Ниже отдельно описываются "общая конфигурация системы", "конфигурация процесса совместного управления блокирующей муфтой и компрессором кондиционера" и "конфигурация процесса совместного управления блокирующей муфтой и генератором переменного тока" относительно конфигураций способа управления и устройства управления блокировкой оснащенного двигателем транспортного средства в первом варианте осуществления.
Общая конфигурация системы
Фиг. 1 иллюстрирует оснащенное двигателем транспортное средство, к которому применяются способ управления и устройство управления блокировкой по первому варианту осуществления. Ниже описывается общая конфигурация системы на основе фиг. 1.
Приводная система транспортного средства содержит двигатель 1, выходной вал 2 двигателя, блокирующую муфту 3, преобразователь 4 крутящего момента, входной трансмиссионный вал 5, бесступенчатую трансмиссию 6 (трансмиссию), ведущий вал 7 и ведущие колеса 8, как проиллюстрировано на фиг. 1.
Компрессор 23 кондиционера, генератор 24 переменного тока и т.п. соединяются с возможностью приведения в действие с коленчатым валом 22 двигателя 1 в качестве вспомогательного оборудования двигателя. Приводная соединительная конструкция сконфигурирована из первого шкива 25, предоставленного на коленчатом валу 22, второго шкива 27, предоставленного на ведущем валу 26 компрессора 23 кондиционера, третьего шкива 29, предоставленного на вращательном валу 28 генератора 24 переменного тока, и ремня 30, намотанного вокруг первого-третьего шкивов 25, 27, 29.
Блокирующая муфта 3 встроена в преобразователь 4 крутящего момента, соединяет двигатель 1 и бесступенчатую трансмиссию 6 через преобразователь 4 крутящего момента посредством расцепления муфты и непосредственно соединяет выходной вал 2 двигателя и входной трансмиссионный вал 5 посредством зацепления муфты. Зацепление/зацепление в режиме проскальзывания/расцепление этой блокирующей муфты 3 управляется посредством фактического давления масла в режиме блокировки, которое регулируется на основе давления в магистрали, которое представляет собой исходное давление, когда значение команды управления блокировкой выводится из модуля 12 CVT-управления, который описывается ниже. Давление в магистрали формируется посредством регулирования, с использованием соленоидного клапана регулирования давления в магистрали, давления масла на выпуске из масляного насоса, который не показан, который вращательно приводится в действие посредством двигателя 1.
Преобразователь 4 крутящего момента содержит рабочее колесо 41 насоса, рабочее колесо 42 турбины, которое располагается напротив рабочего колеса 41 насоса, и статор 43, который располагается между рабочим колесом 41 насоса и рабочим колесом 42 турбины. Этот преобразователь 4 крутящего момента представляет собой гидромуфту, которая передает крутящий момент посредством циркуляции гидравлического масла, заполненного в ней, в каждую лопасть рабочего колеса 41 насоса, рабочего колеса 42 турбины и статора 43. Рабочее колесо 41 насоса соединяется с выходным валом 2 двигателя через крышку 44 преобразователя, внутренняя поверхность которой представляет собой зацепляющую поверхность блокирующей муфты 3. Рабочее колесо 42 турбины соединяется с входным трансмиссионным валом 5. Статор 43 предоставляется на стационарном элементе (картере трансмиссии и т.д.) через одностороннюю муфту 45.
Бесступенчатая трансмиссия 6 представляет собой ременную бесступенчатую трансмиссию, которая непрерывно управляет передаточным отношением посредством назначения диаметра точки контакта ремня первичному шкиву и вторичному шкиву, и вращение выходного вала после переключения передач передается на ведущие колеса 8 через ведущий вал 7.
Система управления приведением в действие содержит модуль 11 управления двигателем (ECU), модуль 12 CVT-управления (CVTCU), модуль 31 AC-управления (ACCU), модуль 32 ALT-управления (ALTCU) и линию 13 CAN-связи, как проиллюстрировано на фиг. 1. Таким образом, четыре модуля 11, 12, 31, 32 управления соединяются таким образом, что они допускают двунаправленную связь через линию 13 CAN-связи.
Датчик 14 частоты вращения двигателя, датчик 15 частоты вращения турбины (= датчик частоты вращения входного вала CVT) и датчик 16 частоты вращения выходного вала CVT (= датчик скорости транспортного средства) предоставляются в качестве датчиков для получения входной информации для управления приведением в действие. Дополнительно предусмотрены датчик 17 величины открытия позиции педали акселератора, датчик 18 частоты вращения вторичного шкива, датчик 19 частоты вращения первичного шкива, датчик 20 фактического давления масла в режиме блокировки, тормозной переключатель 21, переключатель 33 кондиционера и т.п.
Модуль 11 управления двигателем уменьшает объем впрыска топлива в двигатель 1 таким образом, чтобы получать значение уменьшения крутящего момента, которое основано на величине APO открытия позиции педали акселератора, при приеме сигнала уменьшения крутящего момента, запрашивающего начало управления уменьшением крутящего момента двигателя, из модуля 12 CVT-управления через линию 13 CAN-связи. После этого, когда сигнал уменьшения крутящего момента, принимаемый из модуля 12 CVT-управления через линию 13 CAN-связи, прекращается во время выполнения управления уменьшением крутящего момента двигателя, управление впрыском топлива для получения нормального крутящего момента, соответствующего запросу водителя, восстанавливается.
Модуль 12 CVT-управления выполняет управление трансмиссией для управления передаточным отношением бесступенчатой трансмиссии 6, управление давлением в магистрали, управление блокировкой для управления зацеплением/зацеплением в режиме проскальзывания/расцеплением блокирующей муфты 3 и т.п. Управление проскальзыванием при LU-зацеплении (во время LU-зацепления), управление проскальзыванием при LU-расцеплении (во время LU-расцепления), управление распознаванием перегрузочной способности в режиме движения накатом, управление LU-проскальзыванием в режиме движения накатом и т.п. выполняется в качестве видов управления проскальзыванием блокирующей муфты 3. Например, при управлении блокировкой при начальном движении, непосредственно давление в магистрали не стабилизируется, тогда как давление в магистрали, которое представляет собой исходное давление для фактического давления масла в режиме блокировки, повышается; в силу этого значение команды управления блокировкой задерживается (значение команды управления поддерживается), тогда как давление в магистрали повышается. Затем после того, как время задержки истекло, значение команды управления блокировкой повышается, и управление проскальзыванием (один пример управления проскальзыванием при LU-зацеплении) выполняется для того, чтобы постепенно уменьшать частоту вращения при проскальзывании.
Модуль 31 AC-управления выполняет управление работой компрессора, которое повторяет приведение в действие/остановку компрессора 23 кондиционера, когда переключатель 33 кондиционера включен. Помимо этого, модуль 31 AC-управления выполняет совместное управление для задержки работы в режиме переменного тока во время LU-зацепления, во время LU-расцепления, во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом, в модуле 12 CVT-управления.
Когда существует запрос на выработку мощности вследствие уменьшения перегрузочной способности смонтированного в транспортном средстве аккумулятора либо запрос на рекуперацию во время замедления, модуль 32 ALT-управления выполняет управление выработкой мощности за счет генератора переменного тока или управление рекуперацией генератора переменного тока для преобразования энергии приведения в действие двигателя 1 в электрическую энергию посредством использования генератора 24 переменного тока. Помимо этого, модуль 32 ALT-управления выполняет совместное управление для применения предела к значению ALT-нагрузки во время управления распознаванием перегрузочной способности в режиме движения накатом или управления LU-проскальзыванием в режиме движения накатом в модуле 12 CVT-управления.
Конфигурация процесса совместного управления блокирующей муфтой и компрессором кондиционера
Фиг. 2 иллюстрирует последовательность операций процесса совместного управления блокирующей муфтой 3 и компрессором 23 кондиционера, который выполняется в модуле 12 CVT-управления по первому варианту осуществления (модуле совместного управления).
Ниже описывается каждый этап на фиг. 2, показывающем конфигурацию процесса совместного управления блокирующей муфтой 3 и компрессором 23 кондиционера. Описание "LU" является сокращением для "блокировки", описание "AC (AC)" является сокращением для "кондиционера", и описание "ALT (ALT)" является сокращением для "генератора переменного тока".
На этапе S1, определяется то, в данный момент период во время операции нажатия педали акселератора или нет. Если "Да" (акселератор включен), процесс переходит к этапу S2, а если "Нет" (акселератор выключен), процесс переходит к этапу S7.
Здесь, с точки зрения определения операции нажатия педали акселератора, например, определяется в качестве периода во время операции нажатия педали акселератора, когда величина APO открытия позиции педали акселератора из датчика 17 величины открытия позиции педали акселератора составляет величину открытия, отличную от величины открытия 0/8 (акселератор выключен: состояние отпускания педали акселератора). Помимо этого, при использовании переключателя акселератора, определяется в качестве периода во время операции нажатия педали акселератора во включенном состоянии, и определяется в качестве периода во время выполнения операции отпускания педали акселератора в выключенном состоянии.
На этапе S2, после определения включенного акселератора на этапе S1, определяется то, в данный момент период во время LU-зацепления или во время LU-расцепления. Если "Да" (во время LU-зацепления или во время LU-расцепления), процесс переходит к этапу S3, а если "Нет" (зацепленное LU-состояние или расцепленное состояние LU), процесс переходит к концу.
Здесь, "во время LU-зацепления" означает интервал управления проскальзыванием, в течение которого блокирующая муфта 3 переключается из расцепленного состояния в зацепленное состояние посредством использования управления для того, чтобы увеличивать перегрузочную способность блокирующей муфты для блокирующей муфты 3.
"Во время LU-расцепления" означает интервал управления проскальзыванием, в течение которого блокирующая муфта 3 переключается из зацепленного состояния в расцепленное состояние посредством использования управления для того, чтобы уменьшать перегрузочную способность блокирующей муфты для блокирующей муфты 3.
На этапе S3, после определения во время LU-зацепления или во время LU-расцепления на этапе S2, определяется то, находится или нет переключатель 33 кондиционера во включенном состоянии. Если "Да" (ACSW включен), процесс переходит к этапу S4, а если "Нет" (ACSW выключен), процесс переходит к концу.
На этапе S4, после определения того, что ACSW включен, на этапе S3, либо определения того, что LU-зацепление не завершается, или LU-расцепление не завершается, на этапе S5, работа в режиме переменного тока задерживается (нагрузка переменного тока не колеблется), и процесс переходит к этапу S5.
Здесь, "работа в режиме переменного тока задерживается" означает инструктирование нагрузке на двигатель компрессора 23 кондиционера не колебаться, так что во время LU-зацепления или во время LU-расцепления во включенном состоянии ACSW, состояние приведения в действие поддерживается, даже если существует запрос на "приведение в действие --> остановку", и остановленное состояние поддерживается, даже если существует запрос на "остановку --> приведение в действие".
На этапе S5, после задержки работы в режиме переменного тока на этапе S4, определяется то, завершается или нет LU-зацепление, либо то, завершается или нет LU-расцепление. Если "Да" (LU-зацепление завершается, или LU-расцепление завершается), процесс переходит к этапу S6, а если "Нет" (LU-зацепление не завершается, или LU-расцепление не завершается), процесс возвращается к этапу S4.
На этапе S6, после определения того, что LU-зацепление завершается, или LU-расцепление завершается, на этапе S5, задержка при работе в режиме переменного тока завершается, и процесс переходит к концу.
Здесь, "задержка при работе в режиме переменного тока завершается" означает остановку компрессора 23 кондиционера, когда состояние приведения в действие поддерживается посредством использования задержки при работе в режиме переменного тока, даже если запрос на "приведение в действие --> остановку" уже выдан. С другой стороны, компрессор 23 кондиционера приводится в действие, когда остановленное состояние поддерживается посредством использования задержки при работе в режиме переменного тока, даже если запрос на "остановку --> приведение в действие" уже выдан.
На этапе S7, после определения выключенного акселератора на этапе S1, определяется то, в данный момент период во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом при движении накатом с ногой, снятой с педали акселератора. Если "Да" (во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом), процесс переходит к этапу S8, а если "Нет" (не во время управления в режиме движения накатом), процесс переходит к концу.
Здесь, "во время управления распознаванием перегрузочной способности в режиме движения накатом" означает интервал управления распознаванием перегрузочной способности в режиме движения накатом, за счет чего, при проезде накатом, дифференциальное вращение для обновления распознаваемого значения формируется посредством использования управления для того, чтобы уменьшать команду управления гидравлическим давлением при блокировке, получать распознаваемое значение перегрузочной способности блокирующей муфты для блокирующей муфты 3 во время движения накатом.
"Во время управления LU-проскальзыванием в режиме движения накатом" означает интервал управления LU-проскальзыванием в режиме движения накатом, в котором во время движения накатом с блокирующей муфтой 3 в зацепленном состоянии, после переключения в расцепленное состояние посредством использования управления для того, чтобы уменьшать дифференциальное давление в режиме блокировки, транспортное средство переключается в состояние вращения при проскальзывании посредством использования формирования дифференциального вращения.
На этапе S8, после определения во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом на этапе S7, определяется то, находится или нет переключатель 33 кондиционера во включенном состоянии. Если "Да" (ACSW включен), процесс переходит к этапу S9, а если "Нет" (ACSW выключен), процесс переходит к концу.
На этапе S9, после определения того, что ACSW включен, на этапе S8, или определения того, что управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или управление LU-проскальзыванием в режиме движения накатом не завершается, на этапе S10, работа в режиме переменного тока задерживается (нагрузка переменного тока не колеблется), идентично этапу S4, и процесс переходит к этапу S10.
На этапе S10, после задержки работы в режиме переменного тока на этапе S9, определяется то, завершается или нет управление распознаванием перегрузочной способности в режиме движения накатом, либо то, завершается или нет управление LU-проскальзыванием в режиме движения накатом. Если "Да" (управление распознаванием перегрузочной способности в режиме движения накатом завершается, или управление LU-проскальзыванием в режиме движения накатом завершается), процесс переходит к этапу S11, а если "Нет" (управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или управление LU-проскальзыванием в режиме движения накатом не завершается), процесс возвращается к этапу S9.
На этапе S11 после определения того, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или того, что управление LU-проскальзыванием в режиме движения накатом завершается, на этапе S10, задержка при работе в режиме переменного тока завершается, идентично этапу S6, и процесс переходит к концу.
Конфигурация процесса совместного управления блокирующей муфтой и генератором переменного тока
Фиг. 3 иллюстрирует последовательность операций процесса совместного управления блокирующей муфтой 3 и генератором 24 переменного тока, который выполняется в модуле 12 CVT-управления по первому варианту осуществления (модуле совместного управления).
Ниже описывается каждый этап на фиг. 3, показывающем конфигурацию процесса совместного управления блокирующей муфтой 3 и генератором 24 переменного тока.
На этапе S21, определяется то, в данный момент период во время выполнения операции отпускания педали акселератора или нет. Если "Да" (акселератор выключен), процесс переходит к этапу S22, а если "Нет" (акселератор включен), процесс переходит к концу.
Здесь, с точки зрения определения выполнения операции отпускания педали акселератора, например, определяется в качестве периода во время выполнения операции отпускания педали акселератора, когда величина APO открытия позиции педали акселератора датчика 17 величины открытия позиции педали акселератора составляет величину открытия 0/8 (акселератор выключен: состояние отпускания педали акселератора). Помимо этого, при использовании переключателя акселератора, определяется в качестве периода во время выполнения операции отпускания педали акселератора в выключенном состоянии.
На этапе S22, после определения выключенного акселератора на этапе S21, определяется то, в данный момент период во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом при движении накатом с ногой, снятой с педали акселератора, идентично этапу S7 на фиг. 2. Если "Да" (во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом), процесс переходит к этапу S23, а если "Нет" (не во время управления в режиме движения накатом), процесс переходит к концу.
На этапе S23, после определения во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом на этапе S22, определяется то, работает или нет генератор 24 переменного тока в режиме рекуперативного управления. Если "Да" (работа в режиме рекуперативного ALT-управления), процесс переходит к этапу S24, а если "Нет" (не работа в режиме рекуперативного ALT-управления), процесс переходит к концу.
На этапе S24, после определения того, что рекуперативное ALT-управление выполняется, на этапе S23, или определения того, что управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или управление LU-проскальзыванием в режиме движения накатом не завершается, на этапе S25, предел прикладывается к значению ALT-нагрузки, и процесс переходит к этапу S25.
Здесь, "предел прикладывается к значению ALT-нагрузки" означает ограничение изменений значения ALT-нагрузки от начала управления для того, чтобы подавлять флуктуации в нагрузке на двигатель посредством использования генератора 24 переменного тока, даже когда существует запрос на то, чтобы изменять значение ALT-нагрузки, которое выводится в генератор 24 переменного тока, во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом, когда выполняется рекуперативное управление. Примеры режимов для того, чтобы ограничивать изменения значения ALT-нагрузки, включают в себя: поддержание значения ALT-нагрузки от начала управления без изменения, ограничение изменений значения ALT-нагрузки от начала управления допустимой величиной изменения и ограничение изменений значения ALT-нагрузки изменениями, имеющими допустимый градиент изменения.
На этапе S25, после прикладывания предела к значению ALT-нагрузки на этапе S24, определяется то, завершается или нет управление распознаванием перегрузочной способности в режиме движения накатом, либо то, завершается или нет управление LU-проскальзыванием в режиме движения накатом. Если "Да" (управление распознаванием перегрузочной способности в режиме движения накатом завершается, или управление LU-проскальзыванием в режиме движения накатом завершается), процесс переходит к этапу S26, а если "Нет" (управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или управление LU-проскальзыванием в режиме движения накатом не завершается), процесс возвращается к этапу S24.
На этапе S26, после определения того, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или того, что управление LU-проскальзыванием в режиме движения накатом завершается, на этапе S25, ограничение на ALT-нагрузку завершается, и процесс переходит к концу.
Здесь, "ограничение на ALT-нагрузку завершается" означает удалять ограничения на запросы на то, чтобы изменять значение ALT-нагрузки, которые выводятся в генератор 24 переменного тока, и изменять значение ALT-нагрузки, которое ограничено, согласно запросу.
Далее описываются операции.
Ниже отдельно описываются "операция процесса совместного управления с компрессором кондиционера", "операция процесса совместного управления с генератором переменного тока", "операция совместного управления во время LU-зацепления", "операция совместного управления во время управления распознаванием перегрузочной способности в режиме движения накатом", "операция совместного управления во время управления LU-проскальзыванием в режиме движения накатом" и "характерная операция при совместном управлении", относительно операций управления блокировкой по первому варианту осуществления.
Операция процесса совместного управления с компрессором кондиционера
Ниже описывается операция процесса совместного управления блокирующей муфтой 3 и компрессором 23 кондиционера, на основе блок-схемы последовательности операций способа, показанной на фиг. 2.
Во время операции нажатия педали акселератора, когда блокирующая муфта 3 находится в зацепленном LU-состоянии или расцепленном состоянии LU, процесс переходит от "этап S1 --> этап S2 --> конец" на блок-схеме последовательности операций способа по фиг. 2. Во время операции нажатия педали акселератора, когда блокирующая муфта 3 участвует в LU-зацеплении или участвует в LU-расцеплении, но переключатель 33 кондиционера находится в отключенном состоянии, процесс переходит от "этап S1 --> этап S2 --> этап S3 --> конец" на блок-схеме последовательности операций способа по фиг. 2. Таким образом, совместное управление блокирующей муфты 3 и компрессора 23 кондиционера не выполняется, если не удовлетворяются условие управления проскальзыванием при приведении в действие и условие работы в режиме переменного тока.
С другой стороны, во время операции нажатия педали акселератора, когда блокирующая муфта 3 участвует в LU-зацеплении или участвует в LU-расцеплении, и переключатель 33 кондиционера находится во включенном состоянии, процесс переходит от "этап S1 --> этап S2 --> этап S3 --> этап S4 --> этап S5" на блок-схеме последовательности операций способа по фиг. 2. Затем в то время как определяется то, что LU-зацепление не завершается, или то, что LU-расцепление не завершается, на этапе S5, последовательность операций, которая переходит от "этап S4 --> этап S5", повторяется. Таким образом, от момента установления условия управления проскальзыванием при приведении в действие и условия работы в режиме переменного тока до тех пор, пока не будет определено то, что LU-зацепление завершается, или то, что LU-расцепление завершается, работа в режиме переменного тока задерживается, и выполняется совместное управление, при котором не колеблется нагрузка переменного тока компрессора 23 кондиционера. В частности, когда существует запрос на "приведение в действие --> остановку" относительно компрессора 23 кондиционера, когда компрессор 23 кондиционера приводится в действие и во время LU-зацепления или во время LU-расцепления с переключателем 33 кондиционера во включенном состоянии, состояние приведения в действие компрессора 23 кондиционера поддерживается. Помимо этого, когда существует запрос на "остановку --> приведение в действие" относительно компрессора 23 кондиционера, когда компрессор 23 кондиционера остановлен, и во время LU-зацепления или во время LU-расцепления с переключателем 33 кондиционера во включенном состоянии, остановленное состояние компрессора 23 кондиционера поддерживается.
После этого, когда определяется то, что LU-зацепление завершается, или то LU-расцепление завершается, на этапе S5, процесс переходит от "этап S5 --> этап S6 --> конец", и задержка при работе в режиме переменного тока завершается. Когда выполняется задержка при работе в режиме переменного тока, при которой состояние приведения в действие компрессора 23 кондиционера поддерживается, во время окончания задержки при работе в режиме переменного тока, компрессор 23 кондиционера останавливается в ответ на запрос на "приведение в действие --> остановку". С другой стороны, когда выполняется задержка при работе в режиме переменного тока, при которой остановленное состояние компрессора 23 кондиционера поддерживается, во время окончания задержки при работе в режиме переменного тока, компрессор 23 кондиционера приводится в действие в ответ на запрос на "остановку --> приведение в действие".
Во время выполнения операции отпускания педали акселератора, когда блокирующая муфта 3 не участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, процесс переходит от "этап S1 --> этап S7 --> конец" на блок-схеме последовательности операций способа по фиг. 2. Во время выполнения операции отпускания педали акселератора, если блокирующая муфта 3 участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, но переключатель 33 кондиционера находится в отключенном состоянии, процесс переходит от "этап S1 --> этап S7 --> этап S8 --> конец" на блок-схеме последовательности операций способа по фиг. 2. Таким образом, совместное управление блокирующей муфты 3 и компрессора 23 кондиционера не выполняется, если не удовлетворяются условие управления проскальзыванием движения накатом и условие работы в режиме переменного тока.
С другой стороны, во время выполнения операции отпускания педали акселератора, если блокирующая муфта 3 участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, и переключатель 33 кондиционера находится во включенном состоянии, процесс переходит от "этап S1 --> этап S7 --> этап S8 --> этап S9 --> этап S10" на блок-схеме последовательности операций способа по фиг. 2. Затем в то время как определяется то, что управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или то, что управление LU-проскальзыванием в режиме движения накатом не завершается, на этапе S10, последовательность операций, которая переходит от "этап S9 --> этап S10", повторяется. Таким образом, от момента установления условия управления проскальзыванием движения накатом и условия работы в режиме переменного тока до тех пор, пока не будет определено то, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или то, что управление LU-проскальзыванием в режиме движения накатом завершается, работа в режиме переменного тока задерживается, и выполняется совместное управление, при котором не колеблется нагрузка переменного тока компрессора 23 кондиционера. В частности, когда существует запрос на "приведение в действие --> остановку" относительно компрессора 23 кондиционера, когда компрессор 23 кондиционера приводится в действие, и во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом с переключателем 33 кондиционера во включенном состоянии, состояние приведения в действие компрессора 23 кондиционера поддерживается. Помимо этого, когда существует запрос на "остановку --> приведение в действие" относительно компрессора 23 кондиционера, когда компрессор 23 кондиционера остановлен, и во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом с переключателем 33 кондиционера во включенном состоянии, остановленное состояние компрессора 23 кондиционера поддерживается.
После этого, когда определяется то, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или то, что управление LU-проскальзыванием в режиме движения накатом завершается, на этапе S10, процесс переходит от "этап S10 --> этап S11 --> конец", и задержка при работе в режиме переменного тока завершается. Когда выполняется задержка при работе в режиме переменного тока, при которой состояние приведения в действие компрессора 23 кондиционера поддерживается, во время окончания задержки при работе в режиме переменного тока, компрессор 23 кондиционера останавливается в ответ на запрос на "приведение в действие --> остановку". С другой стороны, когда выполняется задержка при работе в режиме переменного тока, при которой остановленное состояние компрессора 23 кондиционера поддерживается, во время окончания задержки при работе в режиме переменного тока, компрессор 23 кондиционера приводится в действие в ответ на запрос на "остановку --> приведение в действие".
Операция процесса совместного управления с генератором переменного тока
Ниже описывается операция процесса совместного управления блокирующей муфтой 3 и генератором 24 переменного тока, на основе блок-схемы последовательности операций способа, показанной на фиг. 3.
Во время выполнения операции отпускания педали акселератора, когда блокирующая муфта 3 не участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, процесс переходит от "этап S21 --> этап S22 --> конец" на блок-схеме последовательности операций способа по фиг. 3. Во время выполнения операции отпускания педали акселератора, если блокирующая муфта 3 участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, но генератор 24 переменного тока не выполняет рекуперативное управление, процесс переходит от "этап S21 --> этап S22 --> этап S23 --> конец" на блок-схеме последовательности операций способа по фиг. 3. Таким образом, совместное управление блокирующей муфты 3 и генератора 24 переменного тока не выполняется, если не удовлетворяются условие управления проскальзыванием движения накатом и условие рекуперативного ALT-управления.
С другой стороны, во время выполнения операции отпускания педали акселератора, если блокирующая муфта 3 участвует в управлении распознаванием перегрузочной способности в режиме движения накатом или управлении LU-проскальзыванием в режиме движения накатом, и генератор 24 переменного тока работает в режиме рекуперативного управления, процесс переходит от "этап S21 --> этап S22 --> этап S23 --> этап S24 --> этап S25" на блок-схеме последовательности операций способа по фиг. 3. Затем в то время как определяется то, что управление распознаванием перегрузочной способности в режиме движения накатом не завершается, или то, что управление LU-проскальзыванием в режиме движения накатом не завершается, на этапе S25, последовательность операций, которая переходит от "этап S24 --> этап S25", повторяется. Таким образом, от момента установления условия управления проскальзыванием движения накатом и условия рекуперативного ALT-управления до тех пор, пока не будет определено то, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или то, что управление LU-проскальзыванием в режиме движения накатом завершается, предел прикладывается к значению ALT-нагрузки, и выполняется совместное управление, при котором подавляется флуктуация в нагрузке на двигатель посредством использования генератора 24 переменного тока. В частности, когда существует запрос на то, чтобы изменять значение ALT-нагрузки, которое выводится в генератор 24 переменного тока во время управления распознаванием перегрузочной способности в режиме движения накатом или во время управления LU-проскальзыванием в режиме движения накатом, когда выполняется рекуперативное управление генератора 24 переменного тока, применяются ограничения, такие как поддержание значения ALT-нагрузки.
После этого, когда определяется то, что управление распознаванием перегрузочной способности в режиме движения накатом завершается, или то, что управление LU-проскальзыванием в режиме движения накатом завершается, на этапе S25, процесс переходит от "этап S25 --> этап S26 --> конец", и ограничение на ALT-нагрузку завершается. Когда ограничение на ALT-нагрузку завершается, значение ALT-нагрузки, которое ограничено, изменяется согласно запросу, чтобы изменять значение ALT-нагрузки, которое выводится в генератор 24 переменного тока.
Операция совместного управления во время LU-зацепления
Фиг. 4 является временной диаграммой, показывающей случай, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по сравнительному примеру. Фиг. 5 является временной диаграммой, показывающей случай, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по первому варианту осуществления. Ниже описывается операция совместного управления во время LU-зацепления на основе временных диаграмм, проиллюстрированных на фиг. 4 и фиг. 5.
На фиг. 4 и фиг. 5, время t0 является временем выполнения операции выключения тормоза, время t1 является временем выполнения операции нажатия педали акселератора, время t2 является временем формирования перегрузочной способности блокирующей муфты, время t3 является временем флуктуации нагрузки переменного тока, время t4 является временем окончания зацепления блокирующей муфты, и время t5 является временем окончания управления блокировкой при начальном движении.
Управление блокировкой при начальном движении примерно разделено на область управления длиной хода (время t0-t2), область управления проскальзыванием (время t2-t3) и область управления плавным включением (время t3-t5). Область управления длиной хода (время t0-t2) представляет собой секцию, в которой блокирующая муфта 3 переключается из полностью расцепленного состояния в состояние хода муфты, в котором перегрузочная способность блокирующей муфты начинает возникать посредством использования управления с прямой связью. Область управления проскальзыванием (время t2-t3) представляет собой секцию, в которой частота вращения при проскальзывании блокирующей муфты 3 постепенно уменьшается посредством использования управления с обратной связью. Область управления плавным включением (время t3-t5) представляет собой секцию для плавного зацепления блокирующей муфты 3 непосредственно перед зацеплением с использованием состояния зацепления в режиме проскальзывания, посредством использования управления с прямой связью (участка области управления проскальзыванием).
Во-первых, описываются операции, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по сравнительному примеру, на основе фиг. 4.
Здесь, поскольку частота вращения при проскальзывании (= "фактическая частота вращения двигателя - частота вращения турбины") сходится во время t5, секция во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) в сравнительном примере становится интервалом управления проскальзыванием для времени t2-t5.
Когда существует флуктуация нагрузки переменного тока (уменьшение нагрузки активированного вспомогательного оборудования) во время t3 непосредственно перед зацеплением муфты во время управления проскальзыванием, крутящий момент двигателя начинает повышаться согласно пошаговому уменьшению нагрузки переменного тока, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки A на фиг. 4. Когда крутящий момент двигателя увеличивается, фактическая частота вращения двигателя повышается, что создает состояние расслоения вращения, в котором частота вращения при проскальзывании, которая имеет тенденцию схождения вплоть до времени t3, начинает увеличиваться снова, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки B на фиг. 4. Следовательно, продольная составляющая G выступает (продольная составляющая G увеличивается, а затем сразу уменьшается), как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки C на фиг. 4, приводя к толчку вследствие флуктуации продольной составляющей G.
После этого описываются операции, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) по первому варианту осуществления, на основе фиг. 5.
Здесь, поскольку частота вращения при проскальзывании (= "фактическая частота вращения двигателя - частота вращения турбины") сходится во время t4, секция во время управления проскальзыванием при управлении блокировкой при начальном движении (расцепление --> зацепление) в первом варианте осуществления становится интервалом управления проскальзыванием для времени t2-t4.
Когда существует запрос на флуктуацию нагрузки переменного тока (уменьшение нагрузки активированного вспомогательного оборудования) во время t3 непосредственно перед зацеплением муфты во время управления проскальзыванием, работа в режиме переменного тока задерживается таким образом, что нагрузка переменного тока не колеблется от времени t3 до времени t4, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки D на фиг. 5. Соответственно, крутящий момент двигателя не колеблется от времени t3 до времени t4. Следовательно, фактическая частота вращения двигателя уменьшается к частоте вращения турбины, и частота вращения при проскальзывании сходится ко времени t4, при поддержании тенденции сходимости вплоть до времени t3, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки E на фиг. 5. Соответственно, выступ продольной составляющей G подавляется, и можно предотвращать толчок вследствие флуктуации продольной составляющей G, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки F на фиг. 5.
Операция совместного управления во время управления распознаванием перегрузочной способности в режиме движения накатом
Фиг. 6 иллюстрирует временную диаграмму, описывающую один пример управления распознаванием перегрузочной способности в режиме движения накатом, и фиг. 7 иллюстрирует временную диаграмму, описывающую операцию, чтобы предотвращать LU-отклонение вследствие флуктуаций нагрузки переменного тока во время распознавания перегрузочной способности в режиме движения накатом по первому варианту осуществления. Ниже описывается операция совместного управления во время управления распознаванием перегрузочной способности в режиме движения накатом на основе временных диаграмм, проиллюстрированных на фиг. 6 и фиг. 7.
Во-первых, описываются подробности управления распознаванием перегрузочной способности в режиме движения накатом на основе фиг. 6.
Цель управления распознаванием перегрузочной способности в режиме движения накатом, которое распознает и управляет перегрузочной LU-способностью в режиме движения накатом, заключается в том, чтобы уменьшать гидравлическое LU-давление в максимально возможной степени во время движения накатом (состояние отсечки топлива), чтобы повышать скорость отклика при LU-расцеплении. Далее, преимущества в отношении рабочих характеристик, которые могут получаться посредством понижения перегрузочной LU-способности во время движения накатом от начального значения до низкого гидравлического давления после распознавания, включают в себя:
(a) Предотвращение останова двигателя (во время быстрого замедления)
(b) Улучшение толчка при LU-расцеплении (во время пологого замедления)
(c) Улучшение толчка от увеличения нагрузки на двигатель при неизменных оборотах (во время ускорения заново после движения накатом)
- и т.п. Здесь, толчок от увеличения нагрузки на двигатель при неизменных оборотах (толчок от увеличения нагрузки на двигатель при неизменных оборотах) означает толчок, вызываемый посредством пошагового входного крутящего момента во время ускорения заново из состояния движения накатом.
Напротив, управление распознаванием перегрузочной способности в режиме движения накатом выполняется при подвергании движению, при котором состояние движения с приведением в действие с зацепленной блокирующей муфтой 3 переходит в состояние движения накатом посредством снятия ноги с педали акселератора. Управление распознаванием перегрузочной способности в режиме движения накатом представляет собой управление для того, чтобы выполнять поиск точки проскальзывания (перегрузочную LU-способность в режиме движения накатом, которая сбалансирована с крутящим моментом при движении накатом двигателя), после продолжения состояния, которое находится близко к установившемуся состоянию, когда скорость транспортного средства равна или выше скорости транспортного средства для LU-разрешения (фиг. 6).
Таким образом, скорость транспортного средства, при которой выполняется управление распознаванием перегрузочной способности в режиме движения накатом, например, равна или превышает скорость транспортного средства для LU-разрешения 60-30 км/ч. После этого, когда выполнение операции отпускания педали акселератора выполняется во время t1 на фиг. 6, (1) Команда управления гидравлическим LU-давлением уменьшается до начального значения (не распознанного), и процесс ожидает некоторое время до времени t2. (2) Команда управления гидравлическим LU-давлением постепенно понижается от времени t2 ко времени t3. (3) Когда заданное проскальзывание (дифференциальное вращение для обновления распознаваемого значения) обнаруживается во время t3, (4) распознаваемое значение обновляется, и команда управления гидравлическим LU-давлением увеличивается таким образом, чтобы возвращаться в зацепленное LU-состояние. Распознаваемое значение оценивается посредством использования такой процедуры.
Команда управления гидравлическим LU-давлением во время t2 является "начальное значение (предыдущее распознаваемое значение)+смещение", команда управления гидравлическим LU-давлением во время t3 является "новое распознаваемое значение", и после времени t3, команда управления гидравлическим LU-давлением увеличивается до "новое распознаваемое значение+смещение".
Далее описывается операция, когда существует флуктуация нагрузки переменного тока во время управления распознаванием перегрузочной способности в режиме движения накатом в сравнительном примере, на основе фиг. 7.
На фиг. 7, время t1 является временем выполнения операции отпускания педали акселератора, время t2 является временем наступления крутящего момента двигателя при движении накатом, время t3 является временем начала уменьшения команды управления гидравлическим LU-давлением, время t4 является временем флуктуации нагрузки переменного тока, и время t5 является временем обнаружения дифференциального вращения для обновления распознаваемого значения (= время формирования LU-отклонения).
Здесь, секция во время управления распознаванием перегрузочной способности в режиме движения накатом в сравнительном примере становится интервалом управления распознаванием перегрузочной способности в режиме движения накатом между временем t3-t5.
Когда выполнение операции отпускания педали акселератора выполняется во время t1, команда управления гидравлическим LU-давлением уменьшается до начального значения ("предыдущее распознаваемое значение+смещение"). Двигатель достигает крутящего момента при движении накатом во время t2, и уменьшение команды управления гидравлическим LU-давлением начинается во время t3. Когда существует флуктуация нагрузки переменного тока (увеличение нагрузки переменного тока) во время t4, которое представляет собой период во время управления распознаванием перегрузочной способности в режиме движения накатом, крутящий момент двигателя уменьшается в соответствии с увеличением нагрузки переменного тока, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки G на фиг. 7. Если крутящий момент двигателя уменьшается, фактическая частота вращения двигателя уменьшается, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки H на фиг. 7, и заданное проскальзывание (дифференциальное вращение для обновления распознаваемого значения) обнаруживается вследствие формирования LU-отклонения (LU-расцепления) во время t5. Когда возникает LU-отклонение, расход топлива и ощущение общей характеристики управляемости ухудшаются. LU-отклонение имеет взаимосвязь: "частота вращения турбины > фактическая частота вращения двигателя" между временем t5 и временем t6, затем "частота вращения турбины=фактическая частота вращения двигателя" в момент времени t6, которая переключается на "фактическая частота вращения двигателя > частота вращения турбины" после времени t6.
Напротив, в первом варианте осуществления, когда существует запрос на флуктуацию нагрузки переменного тока (увеличение нагрузки переменного тока) во время t4, работа в режиме переменного тока задерживается таким образом, что нагрузка переменного тока не колеблется даже после времени t4. Соответственно, крутящий момент двигателя не колеблется до тех пор, пока управление распознаванием перегрузочной способности в режиме движения накатом не будет завершено. Следовательно, управление распознаванием перегрузочной способности в режиме движения накатом выполняется, и формирование LU-отклонения предотвращается, как проиллюстрировано на фиг. 6. Как результат, расход топлива и ощущение общей характеристики управляемости не ухудшаются.
Операция совместного управления во время правления LU-проскальзыванием в режиме движения накатом
Фиг. 8 является временной диаграммой, показывающей случай, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед расцеплением муфты во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) по сравнительному примеру. Фиг. 9 является временной диаграммой, показывающей случай, когда существует флуктуация нагрузки переменного тока с временным интервалом непосредственно перед расцеплением муфты, во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) по первому варианту осуществления. Ниже описывается операция совместного управления во время управления LU-проскальзыванием в режиме движения накатом на основе временных диаграмм, проиллюстрированных на фиг. 8 и фиг. 9.
На фиг. 8 и фиг. 9, время t0 является временем начала уменьшения дифференциального LU-давления, время t1 является временем восстановления после отсечки топлива, время t2 является временем флуктуации нагрузки переменного тока, время t3 является временем наступления точки увеличения крутящего момента двигателя, и время t4 является временем окончания управления LU-проскальзыванием в режиме движения накатом.
Управление блокировкой в режиме движения накатом приблизительно разделяется на область управления дифференциальным LU-давлением во время отсечки топлива (время t0-t1) и область управления дифференциальным LU-давлением во время восстановления после отсечки топлива (время t1-t4). В области управления дифференциальным LU-давлением во время отсечки топлива, бесступенчатая трансмиссия 6 выполняет переключение коробки передач "вниз" в сторону низких значений согласно замедлению при движении накатом при движении; в силу этого продольная составляющая G уменьшается.
Далее описывается операция, когда существует флуктуация нагрузки переменного тока во временном интервале непосредственно перед расцеплением муфты, во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление), по сравнительному примеру на основе фиг. 8.
Здесь, поскольку частота вращения при проскальзывании (= "фактическая частота вращения двигателя - частота вращения турбины") формируется во время t1, секция во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) в сравнительном примере становится интервалом управления LU-проскальзыванием в режиме движения накатом от времени t1 до времени t4, когда управление LU-проскальзыванием в режиме движения накатом завершается.
Когда существует флуктуация нагрузки переменного тока (уменьшение нагрузки активированного вспомогательного оборудования) во время t2 непосредственно перед расцеплением муфты во время управления LU-проскальзыванием в режиме движения накатом, крутящий момент двигателя начинает повышаться согласно пошаговому уменьшению нагрузки переменного тока, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки I на фиг. 8. Когда крутящий момент двигателя увеличивается ко времени t3, фактическая частота вращения двигателя повышается, что создает состояние, в котором частота вращения при проскальзывании, которая увеличена после t1, сходится снова, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки J на фиг. 8. Следовательно, продольная составляющая G выступает (продольная составляющая G увеличивается, а затем сразу уменьшается), как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки K на фиг. 8, приводя к толчку при расцеплении блокирующей муфты вследствие флуктуации продольной составляющей G.
После этого описывается операция, когда существует флуктуация нагрузки переменного тока во временном интервале непосредственно перед расцеплением муфты, во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление), по первому варианту осуществления на основе фиг. 9.
Здесь, поскольку частота вращения при проскальзывании (= "фактическая частота вращения двигателя - частота вращения турбины") формируется во время t1, секция во время управления LU-проскальзыванием в режиме движения накатом при управлении блокировкой в режиме движения накатом (зацепление --> расцепление) в первом варианте осуществления становится интервалом управления LU-проскальзыванием в режиме движения накатом от времени t1 до времени t4, когда управление LU-проскальзыванием в режиме движения накатом завершается.
Когда существует запрос на флуктуацию нагрузки переменного тока (уменьшение нагрузки активированного вспомогательного оборудования) во время t2 непосредственно перед расцеплением муфты во время управления LU-проскальзыванием в режиме движения накатом, работа в режиме переменного тока задерживается таким образом, что нагрузка переменного тока не колеблется от времени t2 до времени t4, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки L на фиг. 9. Соответственно, крутящий момент двигателя не колеблется от времени t2 до времени t4. Следовательно, фактическая частота вращения двигателя постепенно увеличивается от времени t2 до времени t4, и частота вращения при проскальзывании превышает пороговое значение определения LU-расцепления ко времени t4, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки M на фиг. 9. Соответственно, выступ продольной составляющей G подавляется, и можно предотвращать толчок при расцеплении блокирующей муфты вследствие флуктуации продольной составляющей G, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки N на фиг. 9.
Характерная операция совместного управления
В первом варианте осуществления, во время управления проскальзыванием блокирующей муфты 3, выполняется совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя, такого как компрессор 23 кондиционера и генератор 24 переменного тока.
Таким образом, когда существуют флуктуации нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты 3, крутящий момент двигателя, который вводится в блокирующую муфту 3, колеблется; в силу этого заданное состояние вращения при проскальзывании, которое регулируется при управлении проскальзыванием блокирующей муфты 3, ухудшается.
Напротив, посредством подавления флуктуаций нагрузки вспомогательного оборудования двигателя, такого как компрессор 23 кондиционера и генератор 24 переменного тока во время управления проскальзыванием блокирующей муфты 3, подавляются флуктуации в крутящем моменте двигателя, который вводится в блокирующую муфту 3. Соответственно, перегрузочная способность блокирующей муфты и входной крутящий момент в блокирующей муфте 3 сохраняются во взаимосвязи, которая поддерживает заданное состояние вращения при проскальзывании, даже если существует запрос на флуктуацию нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием.
Как результат, можно предотвращать ухудшение состояния вращения при проскальзывании в результате флуктуаций нагрузки вспомогательного оборудования двигателя, такого как компрессор 23 кондиционера и генератор 24 переменного тока во время управления проскальзыванием блокирующей муфты 3, и достигать цели управления проскальзыванием.
В первом варианте осуществления, период, когда выполняется управление проскальзыванием блокирующей муфты 3, представляет собой период, когда выполняется LU-зацепление, в течение которого блокирующая муфта 3 переключается из расцепленного состояния в зацепленное состояние посредством использования управления для того, чтобы увеличивать перегрузочную способность блокирующей муфты для блокирующей муфты 3.
Следовательно, можно разрешать следующие проблемы, которые возникают во время LU-зацепления (расцепление --> зацепление).
Увеличение нагрузки активированного вспомогательного оборудования во время LU-зацепления
- Уменьшение частоты вращения при проскальзывании, вызываемое посредством увеличения тормозной силы двигателя вследствие нагрузки активированного вспомогательного оборудования, формируется в дополнение к уменьшению частоты вращения при проскальзывании, вызываемому посредством управления перегрузочной способностью блокирующей муфты для уменьшения частоты вращения при проскальзывании. Следовательно, уменьшение частоты вращения при проскальзывании становится более быстрым, чем в нормальном состоянии (когда отсутствует флуктуация нагрузки активированного вспомогательного оборудования), в силу этого создавая риск того, что блокирующая муфта 3 внезапно зацепляется, так что формируется толчок при зацеплении блокирующей муфты.
Уменьшение нагрузки активированного вспомогательного оборудования во время LU-зацепления
- По мере того, как крутящий момент двигателя, который использован для приведения в действие вспомогательного оборудования, возвращается, двигатель развивает тягу (частота вращения двигателя увеличивается посредством соответствующей возвращаемой величины крутящего момента двигателя), уменьшенная частота вращения при проскальзывании переключается на увеличение, и возникает риск того, что толчок вследствие флуктуации продольной составляющей G возникает в это время (фиг. 4).
В первом варианте осуществления, период, когда выполняется управление проскальзыванием блокирующей муфты 3, представляет собой период, когда выполняется LU-расцепление, в течение которого блокирующая муфта 3 переключается из зацепленного состояния в расцепленное состояние посредством использования управления для того, чтобы уменьшать перегрузочную способность блокирующей муфты для блокирующей муфты 3.
Следовательно, можно разрешать следующие проблемы, которые возникают во время LU-расцепления (зацепление --> расцепление).
Увеличение нагрузки активированного вспомогательного оборудования во время LU-расцепления
- Когда частота вращения при проскальзывании блокирующей муфты увеличивается, увеличение частоты вращения двигателя подавляется вследствие увеличения нагрузки активированного вспомогательного оборудования, и увеличение частоты вращения при проскальзывании задерживается. Следовательно, требуется время для перевода блокирующей муфты в расцепленное состояние.
Уменьшение нагрузки активированного вспомогательного оборудования во время LU-расцепления
- Увеличение частоты вращения при проскальзывании, вызываемое посредством уменьшения тормозной силы двигателя вследствие нагрузки активированного вспомогательного оборудования, формируется в дополнение к увеличению частоты вращения при проскальзывании, вызываемому посредством управления перегрузочной способностью блокирующей муфты для увеличения частоты вращения при проскальзывании. Следовательно, увеличение частоты вращения при проскальзывании становится более быстрым, чем в нормальном состоянии, в силу этого создавая риск того, что блокирующая муфта внезапно расцепляется, так что формируется толчок при расцеплении блокирующей муфты.
В первом варианте осуществления, период, когда выполняется управление проскальзыванием блокирующей муфты 3, представляет собой период, когда выполняется управление распознаванием перегрузочной способности в режиме движения накатом, за счет чего при подвергании движению накатом, дифференциальное вращение для обновления распознаваемого значения формируется посредством использования управления для того, чтобы уменьшать команду управления гидравлическим LU-давлением, получать распознаваемое значение перегрузочной способности блокирующей муфты во время движения накатом.
Следовательно, можно разрешать следующие проблемы, которые возникают во время управления распознаванием перегрузочной способности в режиме движения накатом.
Увеличение нагрузки активированного вспомогательного оборудования во время управления распознаванием перегрузочной способности в режиме движения накатом
- Тормозная сила двигателя посредством использования нагрузки активированного вспомогательного оборудования увеличивается; в силу этого вращение двигателя не может поддерживаться посредством передачи вращения ведущих колес посредством проскальзывания, за счет этого уменьшая частоту вращения двигателя, и возникает LU-отклонение, при котором частота вращения при проскальзывании увеличивается. В этом случае, распознается перегрузочная способность блокирующей муфты момента, когда возникает LU-отклонение, так что ошибочная перегрузочная способность блокирующей муфты распознается (фиг. 7).
Уменьшение нагрузки активированного вспомогательного оборудования во время управления распознаванием перегрузочной способности в режиме движения накатом
- Тормозная сила двигателя уменьшается; в силу этого уменьшение частоты вращения двигателя задерживается, и увеличение частоты вращения при проскальзывании задерживается, что требует большего количества времени для того, чтобы распознавать перегрузочную способность.
В первом варианте осуществления, период, когда выполняется управление проскальзыванием блокирующей муфты 3, представляет собой период, когда выполняется управление LU-проскальзыванием в режиме движения накатом, при котором во время движения накатом с блокирующей муфтой 3 в зацепленном состоянии, после переключения в расцепленное состояние посредством использования управления для того, чтобы уменьшать дифференциальное давление в режиме блокировки, транспортное средство переключается в состояние вращения при проскальзывании посредством формирования дифференциального вращения.
Следовательно, можно разрешать следующие проблемы, которые возникают во время управления LU-проскальзыванием в режиме движения накатом.
Увеличение нагрузки активированного вспомогательного оборудования во время управления LU-проскальзыванием в режиме движения накатом
- Тормозная сила двигателя увеличивается во время управления LU-проскальзыванием в режиме движения накатом; в силу этого вращение двигателя не может поддерживаться посредством передачи вращения ведущих колес посредством проскальзывания, за счет этого уменьшая частоту вращения двигателя, и возникает LU-отклонение, при котором частота вращения при проскальзывании увеличивается. Таким образом, уменьшение частоты вращения двигателя ускоряется, и появляется необходимость, соответственно, быстро повторно начинать впрыск топлива.
Уменьшение нагрузки активированного вспомогательного оборудования во время управления LU-проскальзыванием в режиме движения накатом
- Тормозная сила двигателя уменьшается во время управления LU-проскальзыванием в режиме движения накатом, и частота вращения при проскальзывании в силу этого уменьшается. Когда существует внезапное торможение в состоянии, в котором частота вращения при проскальзывании уменьшается, блокирующая муфта не может расцепляться вовремя, и возникает риск того, что возникает останов двигателя (фиг. 8).
В первом варианте осуществления, в случае если вспомогательное оборудование двигателя представляет собой компрессор 23 кондиционера, в котором нагрузка колеблется между двумя значениями включения/выключения, когда существует запрос на то, чтобы переключать компрессор 23 кондиционера во время управления проскальзыванием блокирующей муфты 3, операция переключения компрессора 23 кондиционера задерживается (фиг. 2).
Таким образом, в компрессоре 23 кондиционера, управление выполняется для того, чтобы повторять приведение в действие/остановку посредством переключения между включением и выключением во время работы в режиме переменного тока. Затем нагрузка активированного вспомогательного оборудования, которую двигатель 1 принимает вследствие приведения в действие/остановки, колеблется способом включения/выключения, к примеру, нагрузка на двигатель является высокой, когда компрессор 23 кондиционера приводится в действие, и низкой, когда компрессор 23 кондиционера останавливается.
Напротив, когда вспомогательное оборудование двигателя представляет собой компрессор 23 кондиционера посредством задержки операции переключения во время управления проскальзыванием, можно предотвращать флуктуации в крутящем моменте двигателя, вызываемые посредством флуктуаций во включении/выключении нагрузки активированного вспомогательного оборудования.
В первом варианте осуществления, в случае если вспомогательное оборудование двигателя представляет собой генератор 24 переменного тока, в котором нагрузка колеблется в зависимости от абсолютной величины значения нагрузки, когда существует запрос на то, чтобы изменять значение нагрузки генератора 24 переменного тока во время управления проскальзыванием блокирующей муфты 3 при совместном управлении, предел прикладывается к изменениям значения нагрузки генератора 24 переменного тока (фиг. 3).
Таким образом, во время рекуперации, генератор 24 переменного тока выполняет рекуперативное управление, при котором абсолютная величина рекуперативного крутящего момента принудительно колеблется по мере того, как запрашиваемая величина рекуперации изменяется. Абсолютная величина этого рекуперативного крутящего момента является абсолютной величиной значения нагрузки для двигателя 1; если абсолютная величина рекуперативного крутящего момента изменяется, нагрузка активированного вспомогательного оборудования, принимаемая посредством двигателя 1, должна увеличиваться и уменьшаться согласно изменениям значения нагрузки.
Напротив, если вспомогательное оборудование двигателя представляет собой генератор 24 переменного тока, посредством ограничения изменений значения нагрузки во время управления проскальзыванием, можно подавлять флуктуации в крутящем моменте двигателя, вызываемые посредством флуктуаций нагрузки активированного вспомогательного оборудования, которые изменяют значение нагрузки.
Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться посредством использования способа управления и устройства управления блокировкой оснащенного двигателем транспортного средства согласно первому варианту осуществления.
(1) Транспортное средство (оснащенное двигателем транспортное средство) содержит преобразователь 4 крутящего момента, который имеет блокирующую муфту 3 и который размещается между двигателем 1 и трансмиссией (бесступенчатой трансмиссией 6), и вспомогательное оборудование двигателя (компрессор 23 кондиционера, генератор 24 переменного тока), которое приводится в действие посредством двигателя 1, при этом:
- выполняется управление проскальзыванием, которое формирует заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты для блокирующей муфты 3, и
- во время управления проскальзыванием блокирующей муфты 3, выполняется совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя (компрессора 23 кондиционера, генератора 24 переменного тока) (фиг. 1-3).
Как результат, можно предоставлять способ управления блокировкой транспортного средства (оснащенного двигателем транспортного средства), который предотвращает ухудшение характеристик состояния проскальзывания блокирующей муфты 3, даже когда существует запрос на флуктуацию нагрузки вспомогательного оборудования двигателя (компрессора 23 кондиционера, генератора 24 переменного тока) во время управления проскальзыванием блокирующей муфты 3.
(2) Во время управления проскальзыванием блокирующей муфты 3 при проведении зацепления блокирующей муфты (во время LU-зацепления), перегрузочная способность блокирующей муфты для блокирующей муфты 3 управляется таким образом, что она увеличивается по мере того, как блокирующая муфта 3 переходит из расцепленного состояния в зацепленное состояние (фиг. 5).
Как результат, помимо преимущества (1), в случае если нагрузка активированного вспомогательного оборудования увеличивается во время зацепления блокирующей муфты (во время LU-зацепления), можно предотвращать возникновение толчка при зацеплении блокирующей муфты, вызываемого посредством внезапного зацепления блокирующей муфты 3. Кроме того, в случае если нагрузка активированного вспомогательного оборудования уменьшается во время зацепления блокирующей муфты (во время LU-зацепления), можно предотвращать возникновение толчка, вызываемого посредством флуктуаций в продольной составляющей G.
(3) Во время управления проскальзыванием блокирующей муфты 3 при проведении расцепления блокирующей муфты (во время LU-расцепления), перегрузочная способность блокирующей муфты для блокирующей муфты 3 управляется таким образом, что она уменьшается по мере того, как блокирующая муфта 3 переходит из зацепленного состояния в расцепленное состояние (фиг. 2).
Как результат, помимо преимущества (1) или (2), в случае если нагрузка активированного вспомогательного оборудования увеличивается во время расцепления блокирующей муфты (во время LU-расцепления), можно сокращать время до тех пор, пока блокирующая муфта 3 не будет переведена в расцепленное состояние. Кроме того, в случае если нагрузка активированного вспомогательного оборудования уменьшается во время расцепления блокирующей муфты (во время LU-расцепления), можно предотвращать возникновение толчка при расцеплении блокирующей муфты.
(4) Во время управления проскальзыванием блокирующей муфты 3 при проезде по инерции в движении, выполняется управление распознаванием перегрузочной способности в режиме движения накатом, которое уменьшает команду управления гидравлическим давлением при блокировке (команду управления гидравлическим LU-давлением), чтобы формировать дифференциальное вращение для обновления распознаваемого значения и получать распознаваемое значение перегрузочной способности блокирующей муфты для блокирующей муфты 3 в ходе движения накатом (фиг. 6).
Соответственно, помимо преимуществ (1)-(3), в случае, если нагрузка активированного вспомогательного оборудования увеличивается во время управления распознаванием перегрузочной способности в режиме движения накатом, можно предотвращать отклонение блокирующей муфты (LU-отклонение) и предотвращать ошибочное распознавание перегрузочной способности блокирующей муфты. Кроме того, в случае если нагрузка активированного вспомогательного оборудования уменьшается во время управления распознаванием перегрузочной способности в режиме движения накатом, можно сокращать время, требуемое для распознавания перегрузочной способности в режиме движения накатом.
(5) Во время управления проскальзыванием блокирующей муфты 3 при движении накатом при том, что блокирующая муфта 3 зацепляется, выполняется управление проскальзыванием блокировки движения накатом (управление LU-проскальзыванием в режиме движения накатом), которое переключает блокирующую муфту 3 в состояние вращения при проскальзывании посредством формирования дифференциального вращения и которое уменьшает дифференциальное давление в режиме блокировки (дифференциальное LU-давление), с тем чтобы переключаться в расцепленное состояние (фиг. 9).
Соответственно, помимо преимуществ (1)-(4), в случае если нагрузка активированного вспомогательного оборудования увеличивается во время управления проскальзыванием блокировки движения накатом (управления LU-проскальзыванием в режиме движения накатом), можно предотвращать отклонение блокирующей муфты (LU-отклонение) и предотвращать раннее повторное начало впрыска топлива. Кроме того, в случае если нагрузка активированного вспомогательного оборудования уменьшается во время управления проскальзыванием блокировки движения накатом (управления LU-проскальзыванием в режиме движения накатом), можно предотвращать возникновение останова двигателя, вызываемого посредством вмешательства внезапного торможения.
(6) Совместное управление задерживает операцию переключения вспомогательного оборудования двигателя (компрессора 23 кондиционера), нагрузка которого колеблется между двумя значениями включения и выключения в ответ на запрос на то, чтобы переключать вспомогательное оборудование двигателя (компрессор 23 кондиционера) во время управления проскальзыванием блокирующей муфты 3 (фиг. 2, S4, S9).
Соответственно, помимо преимуществ (1)-(5), в случае если вспомогательное оборудование двигателя представляет собой вспомогательное оборудование (компрессор 23 кондиционера), в котором нагрузка колеблется между двумя значениями включения/выключения, можно предотвращать флуктуации в крутящем моменте двигателя, вызываемые посредством флуктуаций во включении/выключении нагрузки активированного вспомогательного оборудования.
(7) Совместное управление ограничивает изменение значения нагрузки вспомогательного оборудования двигателя (генератора 24 переменного тока), нагрузка которого колеблется в зависимости от абсолютной величины значения нагрузки в ответ на запрос на то, чтобы изменять значение нагрузки вспомогательного оборудования двигателя (генератора 24 переменного тока) во время управления проскальзыванием блокирующей муфты 3 (фиг. 3, S24).
Соответственно, помимо преимуществ (1)-(5), в случае если вспомогательное оборудование двигателя представляет собой вспомогательное оборудование (генератор 24 переменного тока), в котором нагрузка колеблется в зависимости от абсолютной величины значения нагрузки, можно предотвращать флуктуации в крутящем моменте двигателя, вызываемые посредством флуктуаций в нагрузке активированного вспомогательного оборудования, которые изменяют значение нагрузки.
(8) Транспортное средство (оснащенное двигателем транспортное средство) содержит преобразователь 3 крутящего момента, который имеет блокирующую муфту 4 и который размещается между двигателем 1 и трансмиссией (бесступенчатой трансмиссией 6), и вспомогательное оборудование двигателя (компрессор 23 кондиционера, генератор 24 переменного тока), которое приводится в действие посредством двигателя 1, при этом:
- модуль управления проскальзыванием (модуль 12 CVT-управления) выполняет управление проскальзыванием для того, чтобы формировать заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты для блокирующей муфты 3,
- модуль управления нагрузкой активированного вспомогательного оборудования двигателя (модуль 31 AC-управления, модуль 32 ALT-управления) выполняет управление нагрузкой активированного вспомогательного оборудования двигателя согласно запросу на флуктуацию нагрузки во вспомогательное оборудование двигателя (компрессор 23 кондиционера, генератор 24 переменного тока), и
- модуль совместного управления (модуль 12 CVT-управления: фиг. 1-3) выполняет процесс совместного управления, который подавляет флуктуации нагрузки вспомогательного оборудования двигателя (компрессора 23 кондиционера, генератора 24 переменного тока) во время управления проскальзыванием блокирующей муфты 3.
Как результат, можно предоставлять устройство управления блокировкой транспортного средства (оснащенного двигателем транспортного средства), которое предотвращает ухудшение характеристик состояния проскальзывания блокирующей муфты 3, даже когда существует запрос на флуктуацию нагрузки вспомогательного оборудования двигателя (компрессора 23 кондиционера, генератора 24 переменного тока) во время управления проскальзыванием блокирующей муфты 3.
Способ управления и устройство управления блокировкой транспортного средства настоящего изобретения описаны выше на основе первого варианта осуществления, но их конкретные конфигурации не ограничены этим вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
В первом варианте осуществления, показан пример, в котором характерный компрессор 23 кондиционера и генератор 24 переменного тока используются в качестве вспомогательного оборудования двигателя. Тем не менее, вспомогательное оборудование двигателя может включать в себя другое вспомогательное оборудование, которое приводится в действие посредством двигателя, такое как циркуляционный насос, в дополнение к компрессору кондиционера и генератору переменного тока.
В первом варианте осуществления, показан пример, в котором управление проскальзыванием блокирующей муфты, в состоянии приведения в действие с нажимаемым акселератором, представляет собой управление проскальзыванием при начальном движении, в котором блокирующая муфта, которая находится в расцепленном состоянии во время трогания с места, переключается в зацепленное состояние через зацепление в режиме проскальзывания. Тем не менее, управление проскальзыванием блокирующей муфты в состоянии приведения в действие может представлять собой пример управления проскальзыванием в ходе движения, в котором выдается запрос на зацепление блокирующей муфты, когда скорость транспортного средства становится равной или превышающей заданную скорость транспортного средства, и процесс для того, чтобы зацеплять блокирующую муфту, начинается. Дополнительно, он может представлять собой пример управления проскальзыванием в ходе движения, в котором выдается запрос на расцепление блокирующей муфты, когда скорость транспортного средства становится равной или меньше заданной скорости транспортного средства, и процесс для того, чтобы расцеплять блокирующую муфту, начинается.
В первом варианте осуществления, показан пример, в котором способ управления и устройство управления блокировкой настоящего изобретения применяются к оснащенному двигателем транспортному средству, оснащенному преобразователем крутящего момента и бесступенчатой трансмиссией. Тем не менее, устройство управления блокирующей муфтой настоящего изобретения может применяться к гибридному транспортному средству, и трансмиссия может представлять собой ступенчатую трансмиссию, которая выполняет ступенчатое автоматическое переключение передач, при условии что транспортное средство оснащено двигателем в качестве источника приведения в движение. Вкратце, устройство управления блокирующей муфтой может применяться к любому транспортному средству, содержащему преобразователь крутящего момента, содержащий блокирующую муфту между двигателем и трансмиссией.
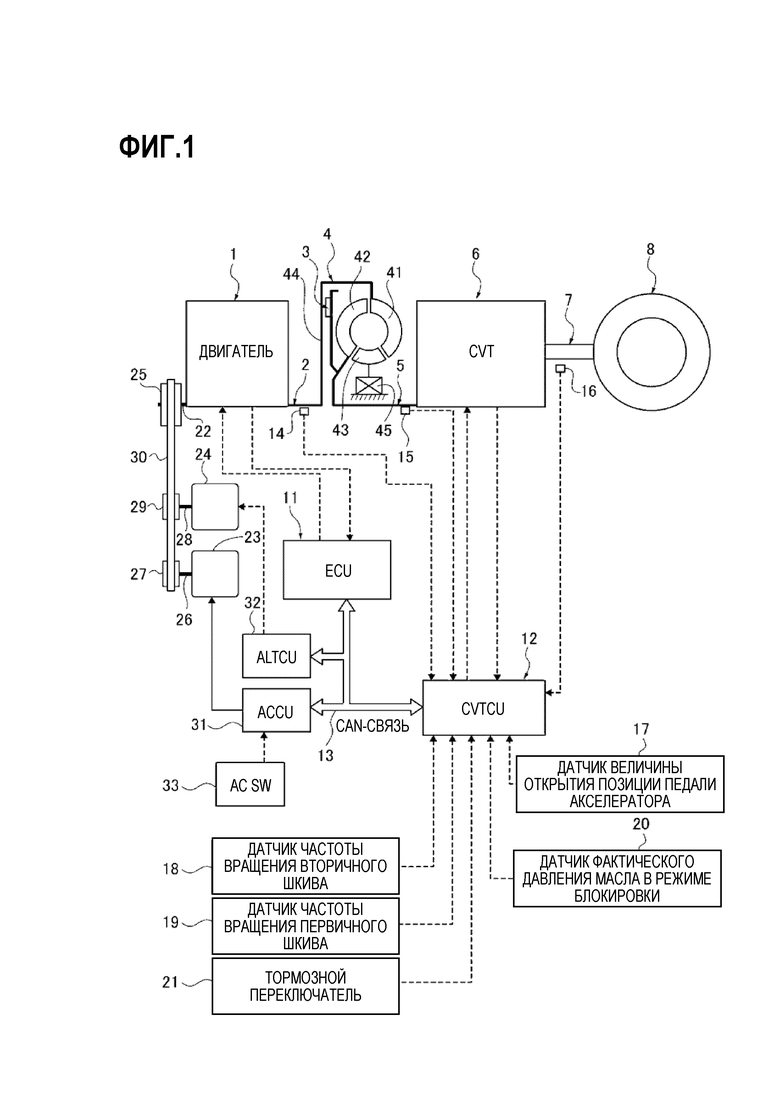
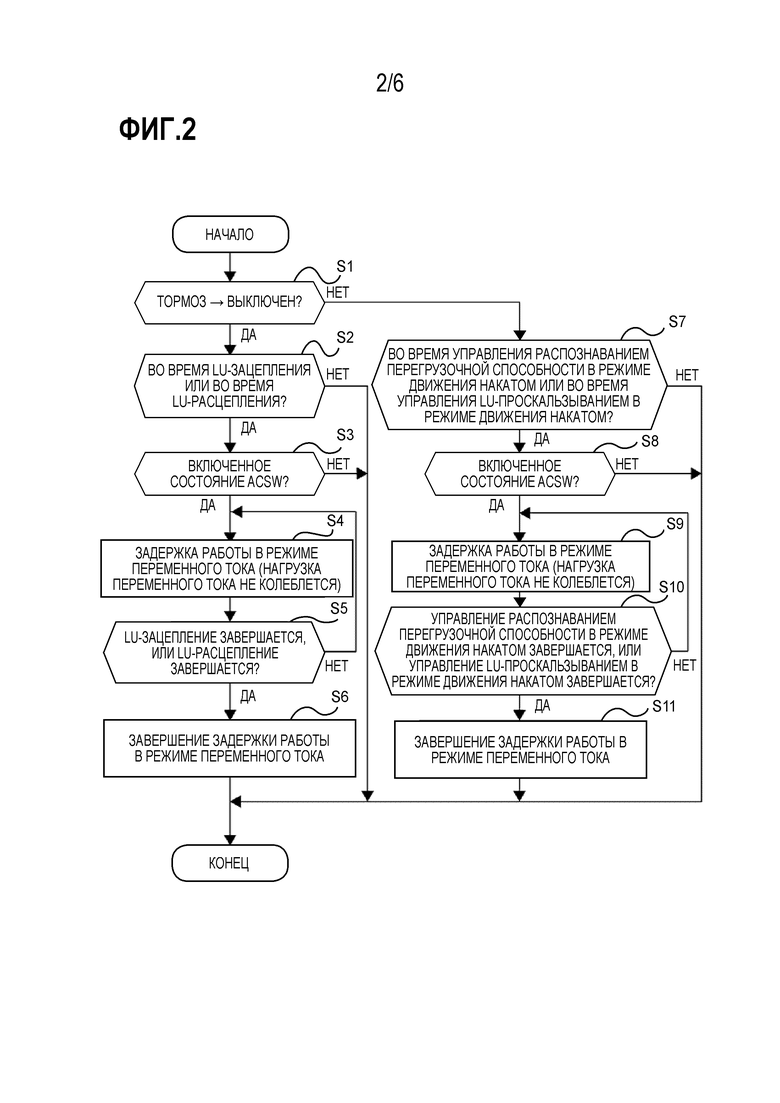
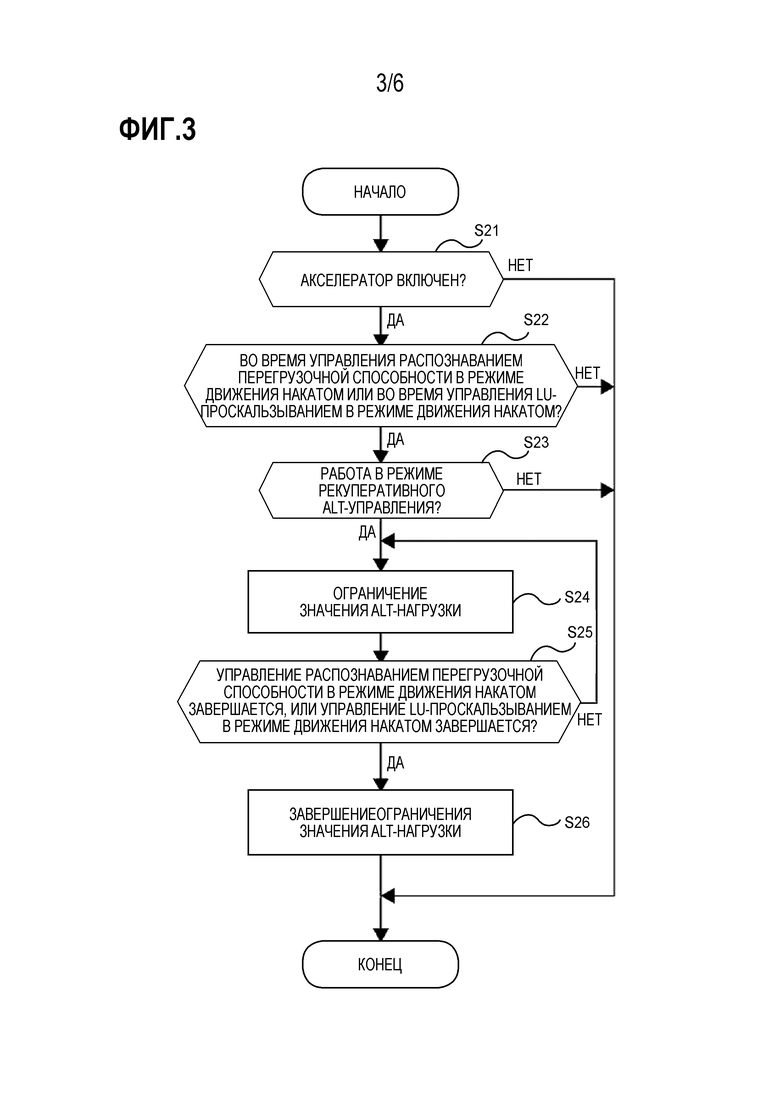
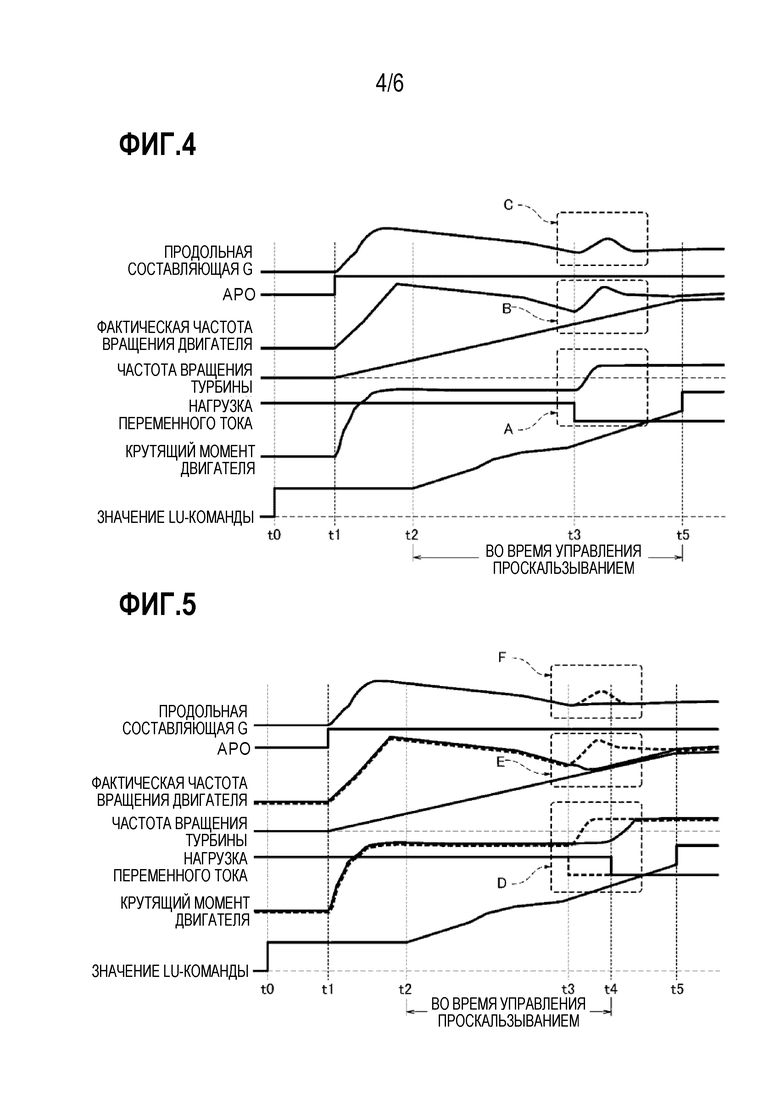
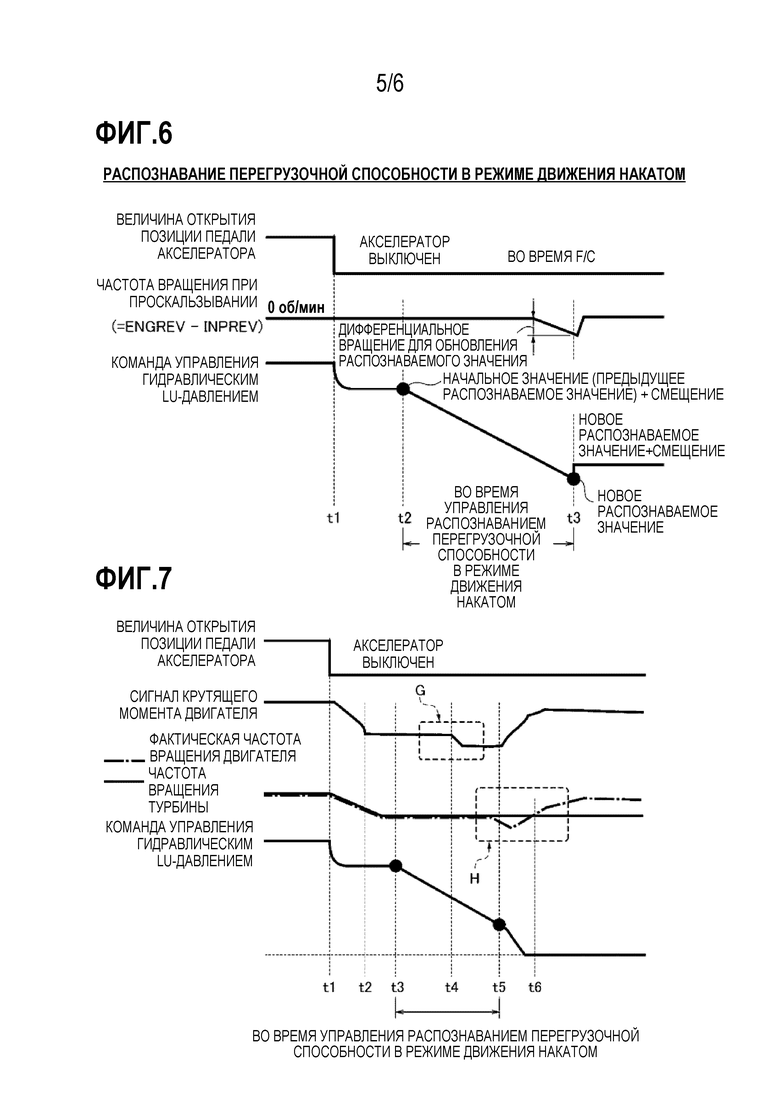
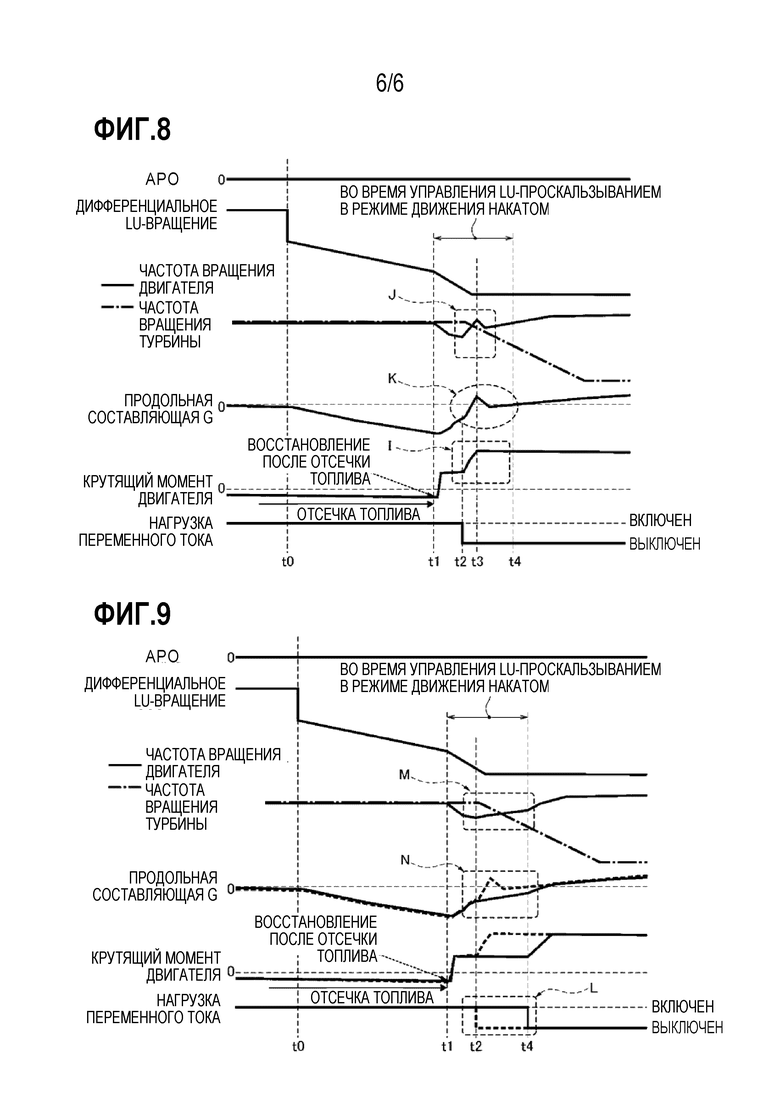
Изобретение относится к области транспорта, а более конкретно к управлению блокировкой транспортного средства. Устройство управления блокировкой транспортного средства оснащено преобразователем (4) крутящего момента, который имеет блокирующую муфту (3) и который размещается между двигателем (1) и бесступенчатой трансмиссией (6). Также имеется вспомогательное оборудование двигателя, такое как компрессор (23) кондиционера и генератор (24) переменного тока, которые приводятся в действие посредством двигателя (1). Управление проскальзыванием выполняется посредством управления перегрузочной способностью блокирующей муфты для блокирующей муфты (3). Во время управления проскальзыванием блокирующей муфты (3) оснащенное двигателем транспортное средство выполняет совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя, такого как компрессор (23) кондиционера и генератор (24) переменного тока. Достигается повышение надежности управления. 4 н. и 4 з.п. ф-лы, 9 ил.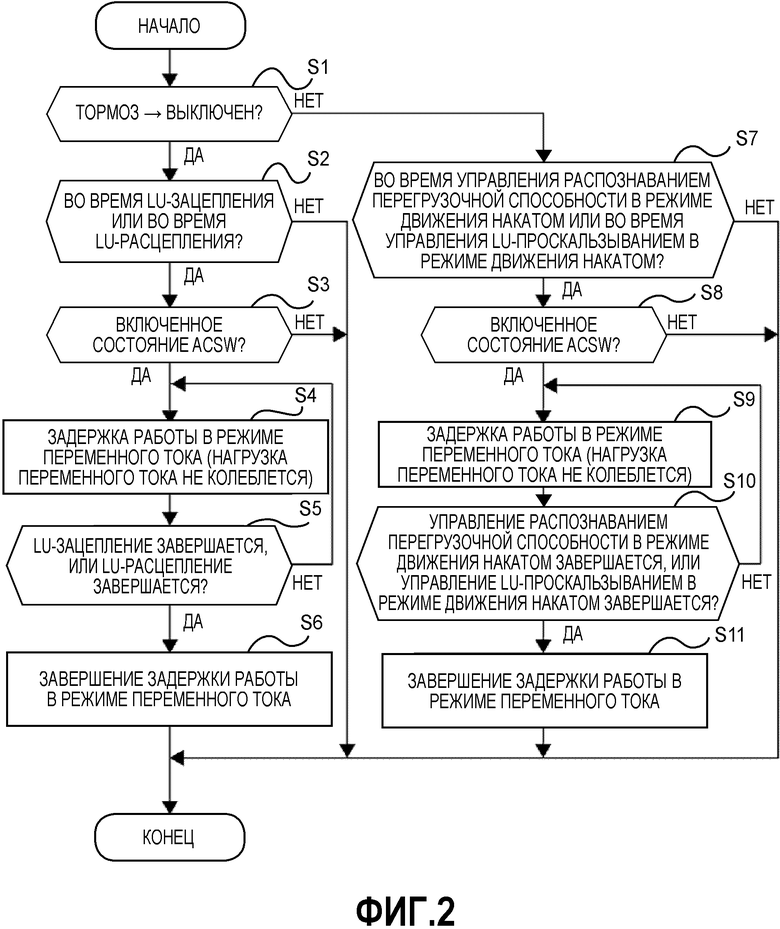
1. Способ управления блокировкой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, и содержащего вспомогательное оборудование двигателя, приводимое в действие в действие посредством двигателя, при этом способ включает этапы, на которых:
выполняют управление проскальзыванием, которое формирует заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты; и
во время управления проскальзыванием блокирующей муфты выполняют совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя,
причем совместное управление задерживает операцию переключения вспомогательного оборудования двигателя, нагрузка которого колеблется между двумя значениями включения и выключения в ответ на запрос на то, чтобы переключать вспомогательное оборудование двигателя во время управления проскальзыванием блокирующей муфты.
2. Способ управления блокировкой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, и вспомогательное оборудование двигателя, приводимое в действие в действие посредством двигателя, при этом способ включает этапы, на которых:
выполняют управление проскальзыванием, которое формирует заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты; и
во время управления проскальзыванием блокирующей муфты выполняют совместное управление, которое подавляет флуктуации нагрузки вспомогательного оборудования двигателя,
причем совместное управление ограничивает изменение значения нагрузки одного из вспомогательного оборудования двигателя, нагрузка которого колеблется в зависимости от абсолютной величины значения нагрузки в ответ на запрос на то, чтобы изменять значение нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты.
3. Способ управления блокировкой транспортного средства по п. 1 или 2, при котором во время управления проскальзыванием блокирующей муфты при проведении зацепления блокирующей муфты, перегрузочная способность блокирующей муфты для блокирующей муфты управляется таким образом, что она увеличивается по мере того, как блокирующая муфта переходит из расцепленного состояния в зацепленное состояние.
4. Способ управления блокировкой транспортного средства по любому из пп. 1-3, при котором во время управления проскальзыванием блокирующей муфты при проведении расцепления блокирующей муфты, перегрузочная способность блокирующей муфты для блокирующей муфты управляется таким образом, что она уменьшается по мере того, как блокирующая муфта переходит из зацепленного состояния в расцепленное состояние.
5. Способ управления блокировкой транспортного средства по любому из пп. 1-4, при котором во время управления проскальзыванием блокирующей муфты при проезде по инерции в движении, выполняется управление распознаванием перегрузочной способности в режиме движения накатом, которое уменьшает команду управления гидравлическим давлением при блокировке, чтобы формировать дифференциальное вращение для обновления распознаваемого значения и получать распознаваемое значение перегрузочной способности блокирующей муфты для блокирующей муфты в ходе движения накатом.
6. Способ управления блокировкой транспортного средства по любому из пп. 1-5, при котором во время управления проскальзыванием блокирующей муфты при движении накатом при том, что блокирующая муфта зацепляется, выполняется управление проскальзыванием блокировки движения накатом, которое переключает блокирующую муфту в состояние вращения при проскальзывании посредством формирования дифференциального вращения и которое уменьшает дифференциальное давление в режиме блокировки, с тем чтобы переключаться в расцепленное состояние.
7. Устройство управления блокировкой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, и вспомогательное оборудование двигателя, приводимое в действие посредством двигателя;
причем устройство управления блокировкой транспортного средства содержит:
модуль управления проскальзыванием, который выполняет управление проскальзыванием для того, чтобы формировать заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты;
модуль управления нагрузкой вспомогательного оборудования двигателя, который выполняет управление нагрузкой вспомогательного оборудования двигателя согласно запросу на флуктуацию нагрузки вспомогательного оборудования двигателя; и
модуль совместного управления, который выполняет процесс совместного управления для того, чтобы подавлять флуктуации нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты,
причем модуль совместного управления задерживает операцию переключения вспомогательного оборудования двигателя, нагрузка которого колеблется между двумя значениями включения и выключения в ответ на запрос на то, чтобы переключать вспомогательное оборудование двигателя во время управления проскальзыванием блокирующей муфты.
8. Устройство управления блокировкой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, и вспомогательное оборудование двигателя, приводимое в действие посредством двигателя;
причем устройство управления блокировкой транспортного средства содержит:
модуль управления проскальзыванием, который выполняет управление проскальзыванием для того, чтобы формировать заданное состояние вращения при проскальзывании посредством управления перегрузочной способностью блокирующей муфты;
модуль управления нагрузкой вспомогательного оборудования двигателя, который выполняет управление нагрузкой вспомогательного оборудования двигателя согласно запросу на флуктуацию нагрузки вспомогательного оборудования двигателя; и
модуль совместного управления, который выполняет процесс совместного управления для того, чтобы подавлять флуктуации нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты,
причем модуль совместного управления ограничивает изменение значения нагрузки вспомогательного оборудования двигателя, нагрузка которого колеблется в зависимости от абсолютной величины значения нагрузки в ответ на запрос на то, чтобы изменять значение нагрузки вспомогательного оборудования двигателя во время управления проскальзыванием блокирующей муфты.
| JP 2004138147 A, 13.05.2004 | |||
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| Устройство для измерения поступательного перемещения чувствительных элементов приборов | 1961 |
|
SU147824A1 |
| JP 2004347004 A, 09.12.2004. | |||

