Система наблюдения давления в шинах (TPMS) является системой для наблюдения за давлением воздуха шин транспортного средства. Когда TPMS обнаруживает, что одна из шин транспортного средства неправильно накачана, индикаторная лампа на приборной панели зажигается, чтобы предупреждать водителя о шине. TPMS может быть опосредованной или непосредственной.
Опосредованная TPMS наблюдает за информацией, доступной снаружи шины, чтобы опосредованно определять давление воздуха. Некоторая опосредованная TPMS полагается на отдельные скорости вращения шин. Если одна шина вращается быстрее других шин, тогда шина имеет меньший диаметр и, таким образом, вероятно является недостаточно накачанной.
Непосредственная TPMS использует датчики давления, установленные либо внутри, либо на внешней поверхности каждой шины. Датчики давления, установленные внутри шин, связываются с помощью беспроводных сигналов ближнего действия.
Ни опосредованная, ни непосредственная TPMS не наблюдает за износом шины, а опосредованная TPMS может не обнаруживать, являются ли все шины недостаточно накачанными вместо только одной шины. Непосредственная и опосредованная TPMS требуют дополнительных датчиков для транспортного средства. Определение износа шины посредством подсчета пробега зачастую является неточным, так как не всякий пробег изнашивает шины одинаково. Визуальный осмотр шин может быть ненадежным и полагается на людей, которые должны выполнять осмотр.
Согласно первому объекту настоящего изобретения создан компьютер, запрограммированный для:
определения того, что первое транспортное средство и второе транспортное средство находятся в колонне без промежуточного транспортного средства;
приема теплового изображения шины первого транспортного средства от второго транспортного средства; и
осуществления навигации по маршруту для первого транспортного средства на основе определения того, что тепловое изображение превышает пороговое значение.
Предпочтительно, определение того, что тепловое изображение превышает пороговое значение, включает определение того, что средняя температура по ширине шины превышает пороговое значение.
Предпочтительно, определение того, что тепловое изображение превышает пороговое значение, включает определение того, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
Предпочтительно, компьютер дополнительно запрограммирован для запрашивания теплового изображения шины при определении того, что окружающая обстановка является, по меньшей мере, одной из сухой и темной, что первое и второе транспортные средства движутся по прямой дороге, и что шина достигла давления плато.
Предпочтительно, компьютер дополнительно запрограммирован для определения того, что шина нуждается в замене до завершения первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение.
Предпочтительно, компьютер запрограммирован для осуществления навигации по маршруту, имеющему более гладкие дороги, чем первоначально запланированный маршрут, при определении того, что тепловое изображение превышает пороговое значение.
Предпочтительно, компьютер запрограммирован для выдачи команды термографической камере первого транспортного средства на захват теплового изображения шины второго транспортного средства.
Согласно второму объекту настоящего изобретения создан компьютер, запрограммированный для:
идентифицирования устройства, имеющего термографическую камеру, обращенную к шине транспортного средства;
запрашивания теплового изображения шины от устройства; и
осуществления навигации по маршруту для транспортного средства при определении того, что тепловое изображение превышает пороговое значение.
Предпочтительно, определение того, что тепловое изображение превышает пороговое значение, включает определение того, что средняя температура по ширине шины превышает пороговое значение.
Предпочтительно, определение того, что тепловое изображение превышает пороговое значение, включает определение того, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
Согласно третьему объекту настоящего изобретения создан способ, при котором:
определяют то, что первое транспортное средство и второе транспортное средство находятся в колонне без промежуточного транспортного средства;
принимают тепловое изображение шины первого транспортного средства от второго транспортного средства; и
осуществляют навигацию по маршруту для первого транспортного средства при определении того, что тепловое изображение превышает пороговое значение.
Предпочтительно, при определении того, что тепловое изображение превышает пороговое значение, определяют, что средняя температура по ширине шины превышает пороговое значение.
Предпочтительно, при определении того, что тепловое изображение превышает пороговое значение, определяют, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
Предпочтительно, дополнительно определяют, что шина нуждается в замене до завершения первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение.
Предпочтительно, дополнительно осуществляют навигацию по маршруту, чтобы иметь более гладкие дороги, чем первоначально запланированный маршрут, при определении того, что тепловое изображение превышает пороговое значение.
Далее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи, на которых:
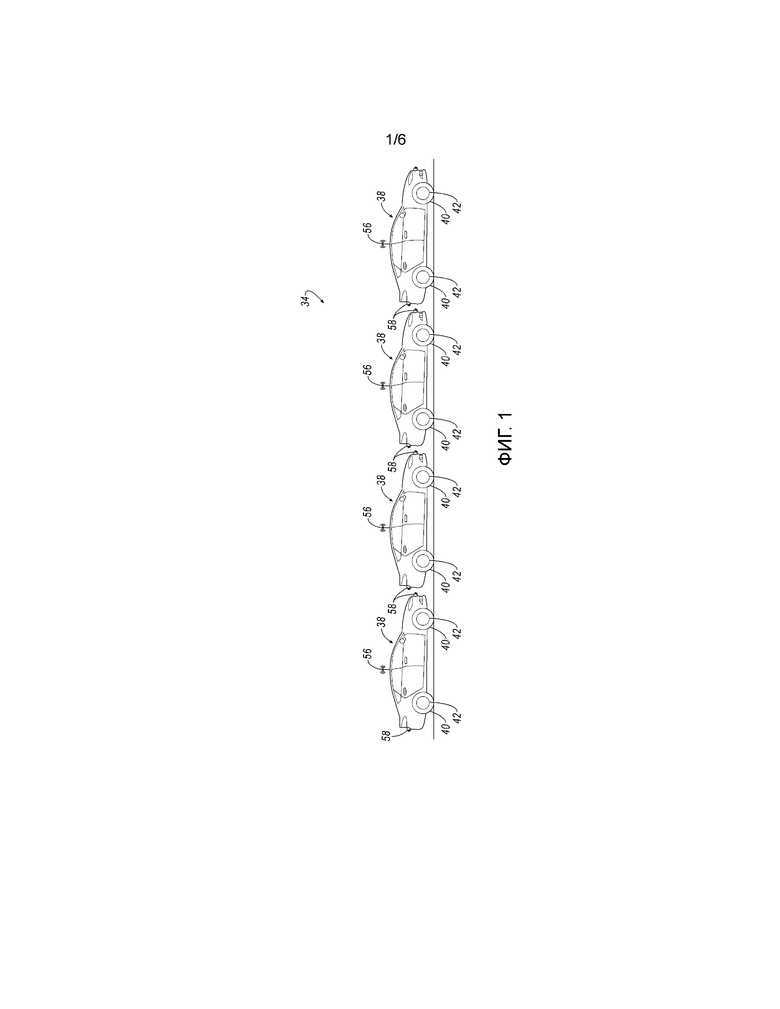
Фиг. 1 - схема примерной колонны транспортных средств;
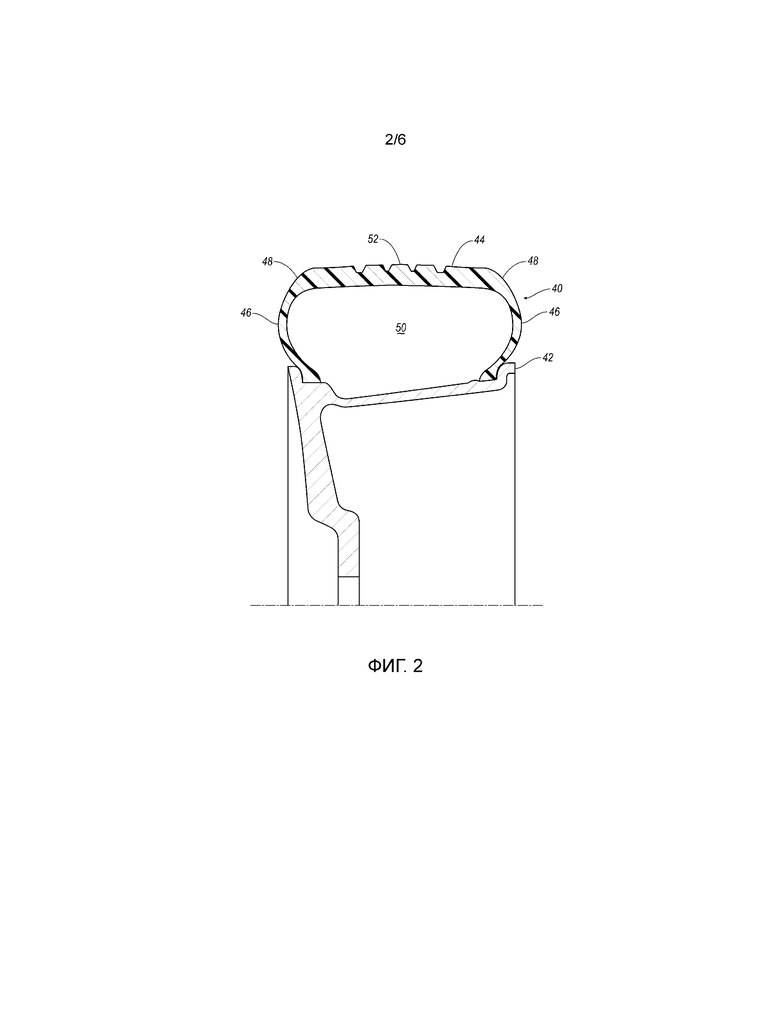
Фиг. 2 - поперечное сечение шины и колеса примерного транспортного средства по линии 2-2 с фиг. 1;
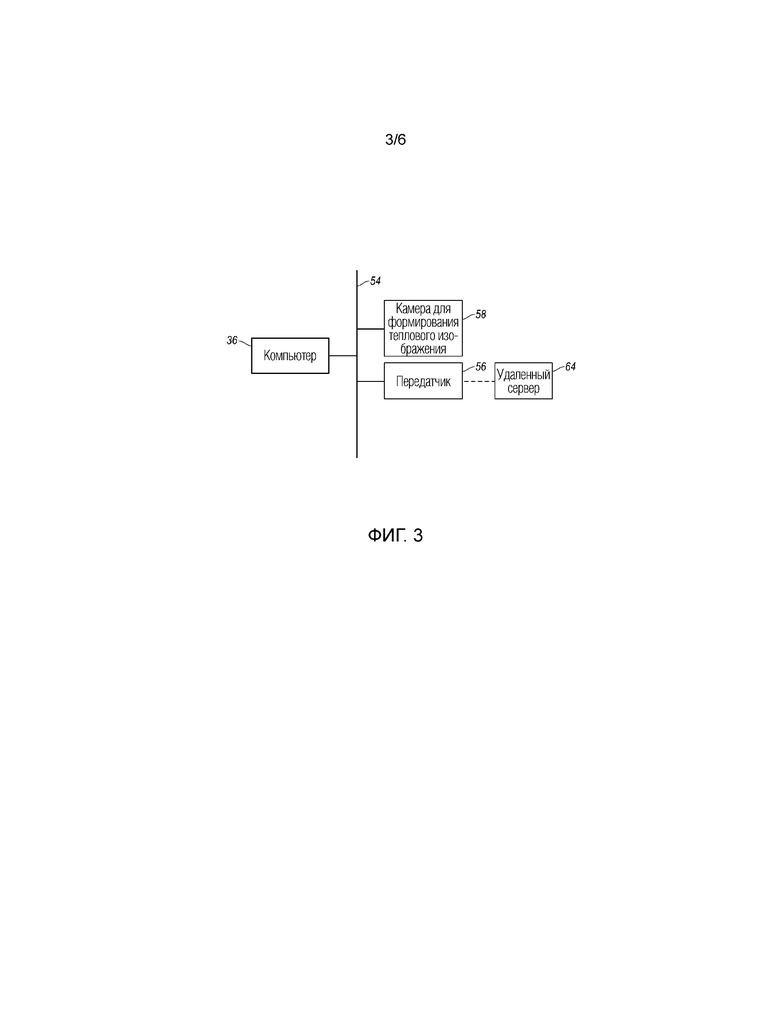
Фиг. 3 - блок-схема примерного транспортного средства с фиг. 1;
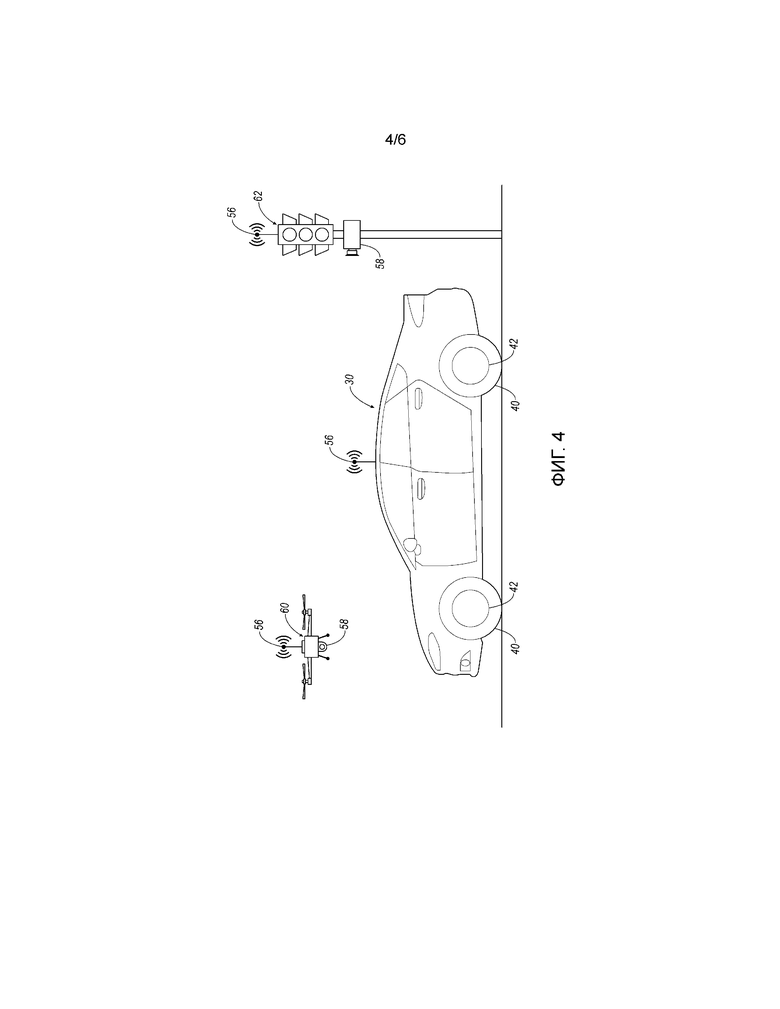
Фиг. 4 - схема сети, затрагивающей примерное транспортное средство с фиг. 1;
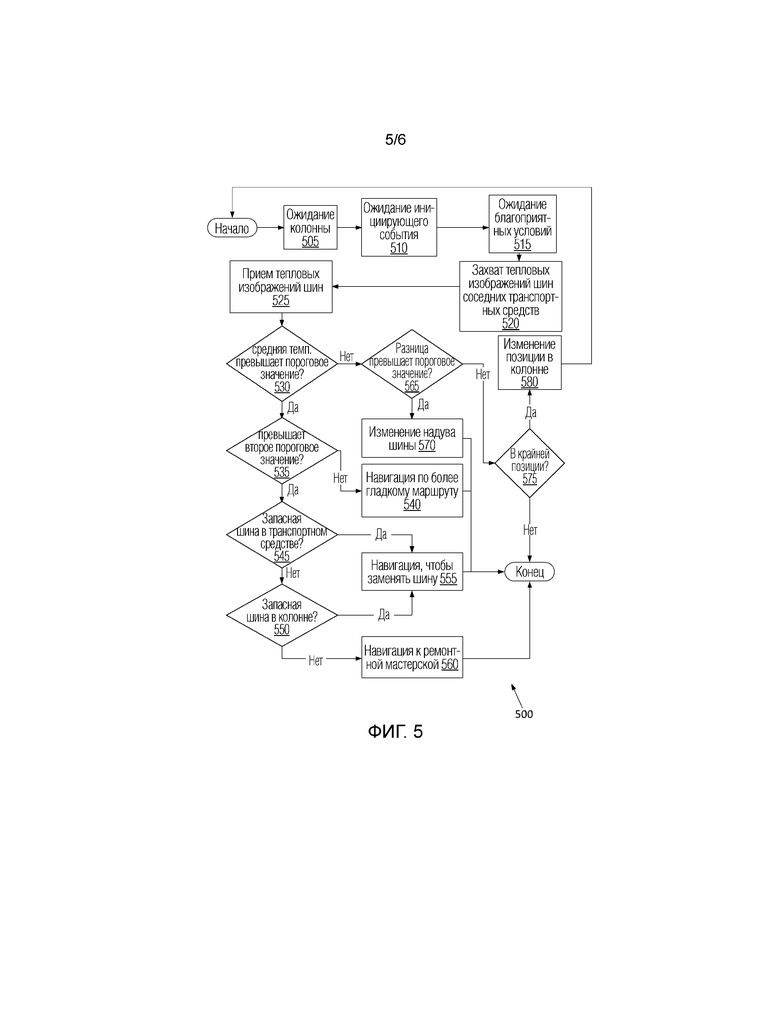
Фиг. 5 - блок-схема последовательности операций процесса для примерного процесса для тестирования шин примерного транспортного средства на фиг. 1; и
Фиг. 6 - блок-схема последовательности операций процесса для второго примерного процесса для тестирования шин примерного транспортного средства с фиг. 1.
Со ссылкой на чертежи, на которых аналогичные номера указывают аналогичные части повсюду на нескольких видах, компьютер 36 программируется, чтобы определять, что первое транспортное средство 30 и второе транспортное средство 32 находятся в колонне 34 без промежуточного транспортного средства, принимать тепловое изображение шины 40 первого транспортного средства 30 от второго транспортного средства 32 и осуществлять навигацию по маршруту для первого транспортного средства 30 на основе определения того, что тепловое изображение превышает пороговое значение. (Прилагательные "первый" и "второй" используются повсюду в этом документе в качестве идентификаторов и не предназначены, чтобы означать важность или порядок). Пороговое значение основывается на температуре, например, температуре в точке на шине 40, средней температуре в последовательности точек на шине 40, разницы температур между двумя точками на шине 40, температурном градиенте в области шины 40 и т.д.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что средняя температура по ширине W шины 40 превышает пороговое значение.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что разница температур между плечевой зоной 48 и серединой 52 по ширине W шины 40 превышает пороговое значение.
Компьютер 36 может быть дополнительно запрограммирован, чтобы запрашивать тепловое изображение шины 40 при определении, что окружающая обстановка является, по меньшей мере, одной из сухой и темной.
Компьютер 36 может быть дополнительно запрограммирован, чтобы запрашивать тепловое изображение шины 40 при определении, что первое и второе транспортные средства 30, 32 движутся по прямой дороге.
Компьютер 36 может быть дополнительно запрограммирован, чтобы запрашивать тепловое изображение шины 40 при определении, что шина 40 достигла давления плато.
Компьютер 36 может быть дополнительно запрограммирован, чтобы запрашивать тепловое изображение шины 40 при приеме предупреждения о низком давлении шины 40.
Компьютер 36 может быть дополнительно запрограммирован, чтобы определять, что шина 40 нуждается в замене до завершения первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение. Дополнительно, компьютер 36 может быть дополнительно запрограммирован, чтобы передавать запрос касательно запасной шины ближайшим транспортным средствам при определении, что в первом транспортном средстве 30 отсутствует запасная шина.
Компьютер 36 может быть дополнительно запрограммирован, чтобы осуществлять навигацию по маршруту, имеющему более гладкие дороги, чем первоначально запланированный маршрут, при определении, что тепловое изображение превышает пороговое значение.
Компьютер 36 может быть дополнительно запрограммирован, чтобы передавать запрос изменения в относительной позиции в колонне 34, и при изменении относительной позиции запрашивать тепловое изображение шины 40.
Компьютер 36 может быть дополнительно запрограммирован, чтобы инструктировать термографической камере 58 первого транспортного средства 30 захватывать тепловое изображение шины 40 второго транспортного средства 32.
Компьютер 36 может быть запрограммирован, чтобы идентифицировать устройство, имеющее термографическую камеру 58, обращенную к шине 40 первого транспортного средства 30, запрашивать тепловое изображение шины 40 от устройства и осуществлять навигацию по маршруту для первого транспортного средства 30 при определении, что тепловое изображение превышает пороговое значение.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что средняя температура по ширине W шины 40 превышает пороговое значение.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что разница температур между плечевой зоной 48 и серединой 52 по ширине W шины 40 превышает пороговое значение.
Способ включает в себя определение того, что первое транспортное средство 30 и второе транспортное средство 32 находятся в колонне 34 без промежуточного транспортного средства, прием теплового изображение шины 40 первого транспортного средства 30 от второго транспортного средства 32 и осуществление навигации по маршруту для первого транспортного средства 30 при определении, что тепловое изображение превышает пороговое значение.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что средняя температура по ширине W шины 40 превышает пороговое значение.
Определение того, что тепловое изображение превышает пороговое значение, может включать в себя определение того, что разница температур между плечевой зоной 48 и серединой 52 по ширине W шины 40 превышает пороговое значение.
Способ может также включать в себя определение того, что шина 40 нуждается в замене перед завершением первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение.
Способ может также включать в себя навигацию по маршруту, имеющему более гладкие дороги, чем первоначально запланированный маршрут, при определении, что тепловое изображение превышает пороговое значение.
Использование теплового наблюдения за шинами 40 первого транспортного средства 30 предоставляет техническое решение проблемы измерения давления шины и наблюдения за действиями транспортного средства 30. Тепловое наблюдение может предоставлять наблюдение за шиной, чтобы дополнять и/или предоставлять резерв для других способов наблюдения за давлением в шине. Система может обнаруживать изношенные шины 40 в дополнение к недостаточно или чрезмерно накачанным шинам 40. Тепловое наблюдение независимо наблюдает за каждой шиной 40, в отличие от опосредованной TPMS. Тепловое наблюдение устраняет погрешность визуальных осмотров и неточность подсчетов пройденного расстояния в милях. Система может уменьшать аварии и/или разрывы шин, рекомендуя замену или правильный надув шин 40, прежде чем разрывы шин происходят.
В целях этого описания автономный режим определяется как режим, в котором каждая из системы тяги, тормозной системы и рулевой системы транспортного средства управляются посредством одного или более компьютеров; в полуавтономном режиме компьютер(ы) транспортного средства управляет(ют) одной или двумя из системы тяги, тормозной системы и рулевой системы.
Со ссылкой на фиг. 1, полностью автономные транспортные средства 30, 32, 38 могут быть приспособлены эксплуатироваться в колонне 34. "Колонна" - это группа транспортных средств 30, 32, 38, которые движутся вместе скоординированным образом (например, относительно скорости, направления и т.д.), и которые оборудованы, чтобы тормозить практически одновременно. Транспортные средства 30, 32, 38 могут быть на связи друг с другом и могут координировать маневры помимо торможения. Связь и координация торможения предоставляет возможность транспортным средствам 30, 32, 38 двигаться более плотно вместе, чем транспортные средства, которые не находятся в колонне 34.
Со ссылкой на фиг. 2, шины 40 являются надувными кольцами, установленными на колеса 42 транспортных средств 30, 32, 38. Шины 40 обеспечивают амортизацию ударов и силу сцепления. Каждая шина 40 может включать в себя протектор 44 и две боковые стенки 46. Протектор 44 протягивается между двумя плечевыми зонами 48 и по окружности вокруг оси вращения. Каждая боковая стенка 46 протягивается радиально внутрь от плечевой зоны 48 до колеса 42. Протектор 44, боковые стенки 46 и колесо 42 могут определять надувную камеру 50, которая может быть заполнена средой надува под давлением, такой как воздух.
При использовании, протектор 44 изнашивается со временем. Другими словами, материал протектора 44 изнашивается, и толщина протектора 44 уменьшается. По мере того как протектор 44 изнашивается, вероятность того, что шина 40 допускает пропускание воздуха или разрыв, увеличивается.
Каждая шина 40 имеет правильное давление накачки, т.е., давление среды надува в надувной камере 50, при котором протектор 44 прижимается к земле равномерно по ширине W протектора 44. Если шина 40 перекачана, т.е., давление надува является слишком высоким, шина 40 прижимается к земле сильнее в средней точке 52 ширины W, чем в плечевых зонах 48. Средняя точка 52 является точкой посередине между плечевыми зонами 48. Если шина 40 недостаточно накачана, т.е., давление надува слишком низкое, шина 40 прижимается к земле сильнее в плечевых зонах 48, чем в средней точке 52.
Шины 40 могут быть сформированы из синтетического или натурального каучука или других упругих материалов, которые обеспечивают достаточную упругость, долговечность и сцепление. Шины 40 могут также включать в себя корды (не показаны), проходящие через упругий материал, и/или химические соединения, добавленные в упругий материал.
Со ссылкой на фиг. 3, компьютер 36 выполняет различные операции, включающие в себя операции, которые описаны в данном документе. Компьютер 36 является вычислительным устройством, которое, как правило, включает в себя процессор и память, память включает в себя одну или более форм компьютерно-читаемых носителей и хранит инструкции, исполняемые процессором для выполнения различных операций, включающих в себя те, которые описаны в данном документе. Память компьютера 36 дополнительно, как правило, хранит удаленные данные, принимаемые через различные механизмы связи, например, через сеть 54 связи. Компьютер 36 может также иметь соединение с бортовым диагностическим разъемом (OBD-II). Хотя один компьютер 36 показан на фиг. 2 для простоты иллюстрации, должно быть понятно, что компьютер 36 может включать в себя, и различные операции, описанные в данном документе, могут выполняться посредством одного или более вычислительных устройств.
Компьютер 36 может быть расположен в первом транспортном средстве 30, как показано на фиг. 3; может быть удаленным от первого транспортного средства 30; или может быть разделен между первым транспортным средством 30 и удаленным местоположением. Если компьютер 36 находится в первом транспортном средстве 30, компьютер 36 может также управлять операциями транспортного средства 30, включающими в себя полуавтономное или автономное действие первого транспортного средства 30, или компьютер 36 может быть отдельным компьютером 36 от компьютера, управляющего или инструктирующего действия. Если компьютер 36 находится удаленно от первого транспортного средства 30, компьютер 36 может быть на связи с первым транспортным средством 30, например, через облачную службу.
Компьютер 36 может передавать сигналы через сеть 54 связи транспортного средства 30, такую как шина сети контроллеров (CAN), Ethernet, локальная соединительная сеть (LIN), и/или посредством другой проводной или беспроводной сети связи. Компьютер 36 может быть на связи с передатчиком 56 и/или термографической камерой 58.
С продолжающейся ссылкой на фиг. 3, передатчик 56 может быть соединен с сетью 54 связи. Передатчик 56 может быть приспособлен, чтобы передавать сигналы беспроводным образом по любому подходящему протоколу беспроводной связи, такому как Bluetooth®, WiFi, 802.11 a/b/g, протокол радиосвязи и т.д. Передатчик 56 может быть приспособлен, чтобы связываться с удаленным сервером 64, т.е., сервером, отдельным и находящимся на расстоянии от транспортного средства. Удаленный сервер 64 может быть расположен снаружи транспортного средства. Например, удаленный сервер 64 может быть ассоциирован с другими транспортными средствами 32, 38 (например, V2V-обмены данными), компонентами инфраструктуры (например, V2I-обмены данными), аварийными бригадами, мобильными устройствами, ассоциированными с владельцем транспортного средства, и т.д. Например, передатчик 56 первого транспортного средства 30 может быть приспособлен связываться со вторым транспортным средством 32, с дроном 60 или с компонентом инфраструктуры, таким как светофор 62, как показано на фиг. 4.
Со ссылкой на фиг. 1, 3 и 4, термографическая камера 58 может быть расположена на одном из транспортных средств 30, 32, 38, обращенной в переднем направлении транспортного средства или заднем направлении транспортного средства. Транспортные средства 30, 32, 38 могут, каждое, иметь множество термографических камер 58, например, термографическую камеру 58, обращенную в переднем направлении транспортного средства, и другую термографическую камеру 58, обращенную в заднем направлении транспортного средства. Термографические камеры могут также быть расположены на дронах 60 или компонентах инфраструктуры.
Термографическая камера 58 является устройством, которое формирует изображения с помощью инфракрасного излучения. Инфракрасное излучение является электромагнитным излучением, имеющим длину волны в диапазоне приблизительно от 700 нанометров до 1 миллиметра. Термографическая камера 58 может быть приспособлена обнаруживать и формировать изображения на основе всего или фрагмента этого диапазона.
Со ссылкой на фиг. 4, дрон 60 может быть на связи с первым транспортным средством 30 через передатчик 56. Дрон 60 является беспилотным летательным аппаратом, таким как квадрокоптер. Дрон 60 может быть оснащен термографической камерой 58. Дрон 60 может быть запущен с первого транспортного средства 30, некоторого другого транспортного средства или удаленного места, например, в географической области, в которой транспортное средство 30 движется.
Первое транспортное средство 30 может также быть на связи с компонентом инфраструктуры через передатчик 56. "Инфраструктура", когда этот термин используется в данном документе, означает один или более компонентов, прикрепленных к окружающей обстановке, окружающей первое транспортное средство 30. Т.е., компоненты инфраструктуры предназначены, чтобы стоять в одном местоположении и в типичном варианте не перемещаться. Например, светофор 62 является компонентом инфраструктуры. Светофор 62 или другой такой компонент может быть оснащен термографической камерой 58.
Фиг. 5 - это блок-схема последовательности операций процесса, иллюстрирующая примерный процесс 500 для тестирования шин 40 первого транспортного средства 30, когда первое транспортное средство 30 находится в колонне 34. Компьютер 36 может быть запрограммирован, чтобы выполнять этапы процесса 500. Компьютеры, ассоциированные с другими транспортными средствами 32, 38 в колонне 34, могут выполнять один и тот же процесс одновременно.
Процесс 500 начинается на этапе 505. На этапе 505 компьютер 36 определяет, что первое транспортное средство 30 и второе транспортное средство 32 находятся в колонне 34 без промежуточного транспортного средства, т.е., транспортного средства между первым транспортным средством 30 и вторым транспортным средством 32. Компьютер 36 может назначать транспортное средство рядом впереди или позади первого транспортного средства 30 в качестве второго транспортного средства 32, таким образом, обеспечивая отсутствие промежуточных транспортных средств между первым транспортным средством 30 и вторым транспортным средством 32.
Далее, на этапе 510, компьютер 36 ожидает инициирующее событие. Инициирующее событие является событием, после которого компьютер 36 будет запрашивать тепловое изображение шины 40. Примеры инициирующих событий включают в себя предупреждение о низком давлении относительно шины 40 от первого транспортного средства 30, сигнал от другого транспортного средства 32, 38 в колонне 34, изменение позиции между транспортными средствами 30, 32, 38 в колонне 34, превышение порогового пройденного расстояния в милях после последнего тестирования шин 40, и т.д. После того как инициирующее событие происходит, процесс 500 продолжается.
Далее, на этапе 515, компьютер 36 ожидает условий, благоприятных для тестирования шин 40. Требуемые условия могут быть выбраны, чтобы предоставлять возможность термографическим камерам 58 иметь достаточно чистый и стабильный обзор шин 40. Например, условия могут включать в себя то, что окружающая область является сухой, темной или и той, и другой; что транспортные средства 30, 32 движутся по прямой дороге, по меньшей мере, в течение предварительно заданной минимальной продолжительности; что давление надува достигло давления плато. Предварительно заданная минимальная продолжительность может быть выбрана, чтобы предоставлять возможность каждой термографической камере 58 достаточного времени, чтобы захватывать тепловое изображение соответствующей шины 40. Давление плато является давлением, которого шина 40 достигает во время эксплуатации, т.е., после того как шины 40 нагреваются из холодного, нерабочего состояния, после чего давление практически не изменяется. Давление плато может быть определено экспериментально. Альтернативно, продолжительность, чтобы достигать давления плато, может быть определена экспериментально, и эксплуатация первого транспортного средства 30 в течение, по меньшей мере, продолжительности времени, чтобы достигать давления плато, может быть условием. После того как благоприятные условия случились, процесс 500 продолжается.
Далее, на этапе 520, компьютер 36 инструктирует термографической камере 58 первого транспортного средства 30 захватывать тепловое изображение одной из шин 40 второго транспортного средства 32. Практически одновременно, но вне процесса 500, термографическая камера 58 второго транспортного средства 32 захватывает тепловое изображение одной из шин 40 первого транспортного средства 30. Термографические камеры 58 каждого из транспортных средств 30, 32, 38 в колонне 34 могут захватывать тепловые изображения шин 40 соседних транспортных средств 30, 32, 38.
Далее, на этапе 525, компьютер 36 принимает тепловое изображение одной из шин 40 первого транспортного средства 30 от второго транспортного средства 32 через передатчик 56. Компьютер 36 может также передавать тепловое изображение шины 40 второго транспортного средства 32 второму транспортному средству 32 через передатчик 56.
Далее, на этапах 530-570, каждый из которых описывается подробно ниже следом за кратким описанием, предоставленным в этом параграфе, компьютер 36 определяет, превышает ли тепловое изображение одно или более пороговых значений, и осуществляет навигацию по маршруту для первого транспортного средства 30 на основе определения, что тепловое изображение превышает одно или более пороговых значений. Компьютер 36 сверяет тепловое изображение с пороговыми значениями на этапах 530 и 565 решения. Компьютер 36 осуществляет навигацию по маршрутам на основе определения того, что тепловое изображение превышает одно из пороговых значений на этапах 540, 555, 560 и 570.
После этапа 525, на этапе 530 решения, компьютер 36 определяет, превышает ли тепловое изображение первое пороговое значение, определяя, превышает ли средняя температура по ширине W шины 40 первое пороговое значение. Первое пороговое значение является температурой. Компьютер 36 может выбирать массив точек по ширине W шины 40 в изображении, когда шина 40 находится в соприкосновении с дорогой, например, семь точек, равномерно разнесенных между плечевыми зонами 48. Компьютер 36 может среднее значение, т.е., арифметическое среднее, точек, чтобы определять среднюю температуру по ширине W шины 40. Для каждого типа шины 40 экспериментально определенная корреляция существует между средней температурой и износом шины 40. Компьютер 36 сравнивает среднюю температуру с первым пороговым значением. Если средняя температура ниже первого порогового значения, процесс 500 переходит к этапу 565 решения.
Если средняя температура выше первого порогового значения, далее, на этапе 535 решения, компьютер 36 определяет, превышает ли средняя температура по ширине W шины 40 второе пороговое значение. Второе пороговое значение является температурой. Второе пороговое значение может изменяться с расстоянием, остающимся в первоначально запланированном маршруте. Первоначально запланированный маршрут может быть определен, прежде чем колонна 34 начала движение, в качестве предназначенного маршрута, которому первое транспортное средство 30 и/или колонна 34 будет следовать между начальным местоположением и пунктом назначения. Второе пороговое значение может быть выбрано, чтобы задавать приемлемо низкую вероятность того, что тип шины 40 откажет в пределах известного расстояния, например, расстояния, оставшегося в первоначально запланированном маршруте. Если средняя температура по ширине W шины 40 превышает второе пороговое значение, процесс 500 переходит к этапу 545 решения.
Если средняя температура по ширине W шины 40 ниже второго порогового значения, далее, на этапе 540, компьютер 36 определяет запасной маршрут из текущего местоположения первого транспортного средства 30 до пункта назначения первоначально запланированного маршрута. Запасной маршрут выбирается имеющим более гладкие дороги, чем первоначально запланированный маршрут. Компьютер 36 может принимать оценки гладкости для расстояний дорог, включенных вместе с картографической информацией. "Оценка гладкости" является показателем того, насколько неровным или гладким является участок дороги. Данные, определяющие оценки гладкости, могут быть собраны посредством других транспортных средств, проезжающих по дороге, например, через системы подвески транспортных средств. Данные могут включать в себя, например, болтанку или число встреченных выбоин. Оценки гладкости могут быть основаны, например, на частоте и амплитуде ударов, испытываемых системами подвески транспортного средства, проезжающего по участку дороги. После этапа 540 процесс 500 заканчивается.
Если средняя температура по ширине W шины 40 превышает второе пороговое значение, после этапа 535 решения, на этапе 545 решения, компьютер 36 определяет, имеет ли первое транспортное средство 30 запасную шину на борту. Если шины 40 оснащаются системами наблюдения за давлением в шине (TPMS) или транспондерами радиочастотной идентификации (RFID), компьютер 36 может подсчитывать число сигналов от TPMS или RFID-транспондеров. Если компьютер 36 обнаруживает пять сигналов, тогда первое транспортное средство 30 имеет запасную шину; если компьютер 36 обнаруживает четыре сигнала, тогда первое транспортное средство 30 не имеет запасной шины. Если компьютер 36 определяет, что первое транспортное средство 30 имеет запасную шину, процесс 500 переходит к этапу 555.
Если компьютер 36 определяет, что первое транспортное средство 30 не имеет запасной шины, далее, на этапе 550 решения, компьютер 36 передает запрос запасной шины ближайшим транспортным средствам, например, другим транспортным средствам 32, 38 в колонне 34 и определяет, отвечает ли утвердительно какое-либо из других транспортных средств 32, 38. Если ни одно из других транспортных средств 32, 38 в колонне 34 не имеет запасной шины, процесс 500 переходит к этапу 560.
После этапа 545 решения, если первое транспортное средство 30 имеет запасную шину, или после этапа 550 решения, если другое транспортное средство 32, 38 имеет запасную шину, на этапе 555, компьютер 36 осуществляет навигацию, чтобы заменять шину 40, превышающую второе пороговое значение, запасной шиной. Если оператор-человек находится в колонне 34, тогда первое транспортное средство 30, транспортное средство, везущее запасную шину (если подходит), и транспортное средство, везущее оператора-человека (если это отдельное транспортное средство), все подъезжают к обочине дороги, чтобы предоставлять возможность оператору-человеку заменять шину 40, превышающую второе пороговое значение, запасной шиной. Если колонна 34 не имеет оператора-человека, тогда первое транспортное средство 30 и транспортное средство, везущее запасную шину (если подходит), может осуществлять навигацию до сервисной станции или ремонтной мастерской для замены шины 40, превышающей второе пороговое значение, запасной шиной. После этапа 555 процесс 500 заканчивается.
После этапа 550 решения, если ни одно из транспортных средств 32, 38 в колонне 34 не имеет запасной шины, на этапе 560, компьютер 36 осуществляет навигацию к сервисной станции или ремонтной мастерской, чтобы приобретать запасную шину и заменять шину 40, превышающую второе пороговое значение, запасной шиной. После этапа 560 процесс 500 заканчивается.
После этапа 530 решения, если средняя температура ниже первого порогового значения, на этапе 565 решения компьютер 36 определяет, превышает ли тепловое изображение третье пороговое значение, определяя, превышает ли разница температур между плечевой зоной 48 и средней точкой 52 по ширине W шины 40 третье пороговое значение. Третье пороговое значение является разницей температур, измеренной в единицах измерения температуры, например, градусах Цельсия. Компьютер 36 может выбирать точки в изображении в средней точке 52 и в плечевых зонах 48, где шина 40 касается дороги, и компьютер 36 измеряет температуры в точках. Компьютер 36 затем измеряет разницу в температурах между температурой в каждой плечевой зоне 48 и температурой в средней точке 52, и компьютер 36 определяет, превышает ли разница третье пороговое значение. Альтернативно или дополнительно, компьютер 36 может выбирать массив точек по ширине W шины 40 в изображении, когда шина 40 находится в соприкосновении с дорогой, например, семь точек, равномерно разнесенных между плечевыми зонами 48. Компьютер 36 затем измеряет наибольшую разницу в температуре между точками, которые не находятся в средней точке 52, и точкой, находящейся в средней точке 52; компьютер 36 затем сравнивает эту разницу с третьим пороговым значением. Альтернативно или дополнительно, третье пороговое значение может отличаться в зависимости от того, выше или ниже температура в средней точке 52 температуры в плечевой зоне 48 или в крайней точке, которая не находится в средней точке 52. Если тепловое изображение не превышает третье пороговое значение, процесс 500 переходит к этапу 575 решения.
Если тепловое изображение превышает третье пороговое значение, далее, на этапе 570, компьютер 36 осуществляет навигацию первого транспортного средства 30, чтобы изменять давление надува шины 40, превышающее третье пороговое значение. Если оператор-человек находится в колонне 34, тогда первое транспортное средство 30 и транспортное средство, везущее оператора-человека (если это отдельное транспортное средство), подъезжают к обочине дороги, чтобы предоставлять возможность оператору-человеку добавлять среду надува в шину 40 или выпускать среду надува из шины 40. Если колонна 34 не имеет оператора-человека, тогда первое транспортное средство 30 может осуществлять навигацию к сервисной станции или ремонтной мастерской, чтобы добавлять среду надува в шину 40 или выпускать среду надува из шины 40. Альтернативно или дополнительно, транспортное средство 30 может быть оборудовано, чтобы автоматически надувать или спускать шины 40. После этапа 570 процесс 500 заканчивается.
Если тепловое изображение не превышает третье пороговое значение, после этапа 565 решения, на этапе 575 решения, компьютер 36 определяет, находится ли первое транспортное средство 30 в крайней позиции колонны 34, другими словами, является ли первое транспортное средство 30 ведущим транспортным средством или последним транспортным средством в колонне 34. Если первое транспортное средство 30 было ведущим транспортным средством колонны 34, тогда тепловые изображения не захватывались для передних шин 40 первого транспортного средства 30. Если первое транспортное средство 30 было последним транспортным средством колонны 34, тогда тепловые изображения не захватывались для задних шин 40 первого транспортного средства 30. Если первое транспортное средство 30 не находится в крайней позиции колонны 34, тогда процесс 500 заканчивается.
Если первое транспортное средство 30 находится в крайней позиции колонны 34, далее, на этапе 580, компьютер 36 передает запрос изменения в относительной позиции в колонне 34. После изменения в относительной позиции процесс 500 повторно начинается, так что первое транспортное средство 30 может принимать тепловые изображения шин 40, для которых первое транспортное средство 30 ранее не принимало изображения. Изменение в относительной позиции может служить в качестве инициирующего события на этапе 510.
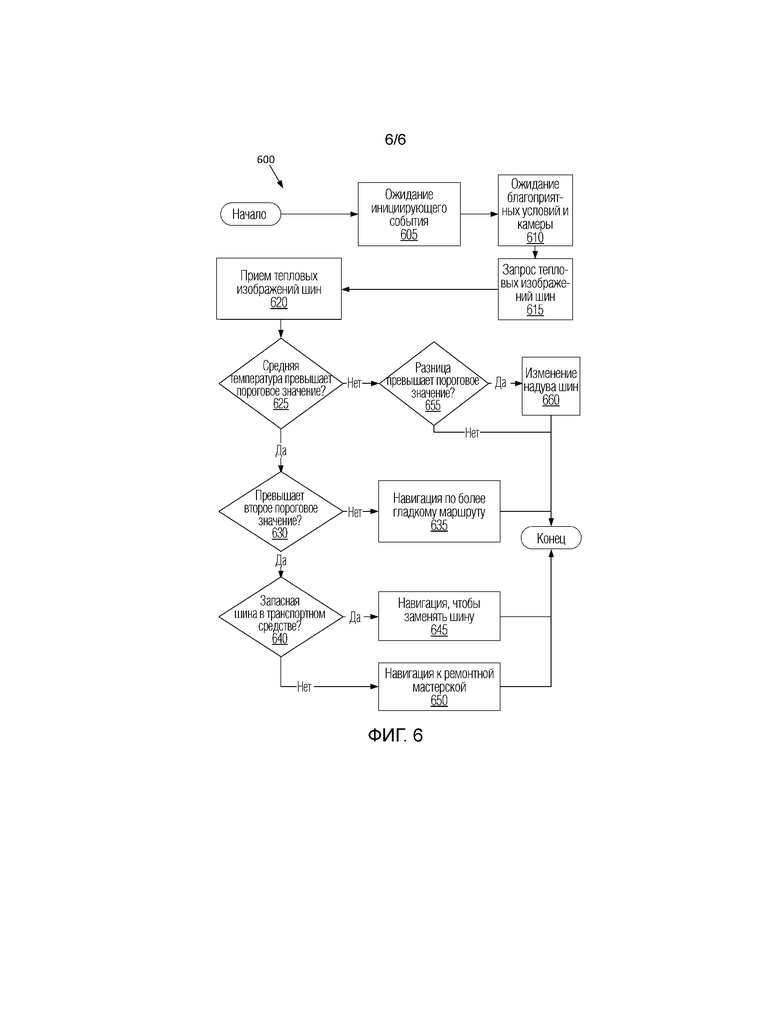
Фиг. 6 - это блок-схема последовательности операций процесса, иллюстрирующая примерный процесс 600 для испытания шин 40 первого транспортного средства 30, когда первое транспортное средство 30 не является обязательно частью колонны 34. Компьютер 36 может быть запрограммирован, чтобы выполнять все этапы процесса 600.
Процесс 600 начинается на этапе 605. На этапе 605 компьютер 36 ожидает инициирующего события, как описано выше относительно этапа 510.
Далее, на этапе 610, компьютер 36 идентифицирует устройство, имеющее термографическую камеру 58, обращенную к шине 40 первого транспортного средства 30, в то же время ожидая условий, благоприятных для тестирования шин 40. Устройство может быть, например, дроном 60 или компонентом инфраструктуры, таким как светофор 62. Требуемые условия могут быть выбраны, чтобы предоставлять возможность термографической камере 58 иметь достаточно чистый и стабильный обзор шин 40. Например, условия могут включать в себя то, что окружающая область является сухой, темной, или и той, и другой; что первое транспортное средство 30 будет неподвижным в течение, по меньшей мере, предварительно заданной минимальной продолжительности времени; что давление надува достигло давления плато. Предварительно заданная минимальная продолжительность времени может быть выбрана, чтобы предоставлять возможность термографической камере 58 достаточного времени, чтобы захватывать тепловое изображение шины 40. После того как благоприятные условия случились, в то время как термографическая камера 58 обращена к шине 40, процесс 600 продолжается.
Далее, на этапе 615, компьютер 36 запрашивает тепловое изображение шины 40 от устройства через передатчик 56.
Далее, на этапе 620, компьютер 36 принимает тепловое изображение одной из шин 40 первого транспортного средства 30 от устройства через передатчик 56.
Далее, на этапах 625-660, каждый из которых описывается подробно ниже следом за кратким описанием, предоставленным в этом параграфе, компьютер 36 определяет, превышает ли тепловое изображение одно или более пороговых значений, и осуществляет навигацию по маршруту для первого транспортного средства 30 на основе определения, что тепловое изображение превышает одно или более пороговых значений. Компьютер 36 сверяет тепловое изображение с пороговыми значениями на этапах 625 и 655 решения. Компьютер 36 осуществляет навигацию по маршрутам на основе определения того, что тепловое изображение превышает одно из пороговых значений на этапах 635, 645, 650 и 660. Описание каждого из этапов 625-660 является таким же, что и описание выше для соответствующего этапа в процессе 500, за исключением того, что компьютер 36 не определяет, имеет ли (необязательно присутствует) колонна 34 запасную шину, и компьютер 36 не определяет, находится ли транспортное средство 30 в крайней позиции колонны 34.
В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
Вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, отдельно или в комбинации, Java™, C, C++, Matlab, Simulink, Stateflow,Visual Basic, Java Script, Perl, HTML и т.д. Некоторые из этих вариантов применения могут быть скомпилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и переданы с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
Компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем) включает в себя любой нетранзиторный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором ECU. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для сохранения, осуществления доступа и извлечения различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включается в вычислительное устройство с использованием компьютерной операционной системы, к примеру, одной из компьютерных операционных систем, упомянутых выше, и является доступным через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
На чертежах, идентичные ссылки с номерами указывают идентичные элементы. Дополнительно, некоторые или все из этих элементов могут быть изменены. Что касается носителей, процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, но должны вместо этого быть определены со ссылкой на прилагаемую формулу изобретения, вместе с полными рамками эквивалентов, к которым такие пункты формулы приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Резюмируя, должно быть понятно, что изобретение способно к модификации и вариативности и ограничено только последующей формулой изобретения.
Все термины, используемые в формуле изобретения, предполагают получение их очевидных и обычных значений, которые понятны специалистам в области техники, пока явное указание на противоположное не будет выполнено в данном документе. В частности, использование сингулярных артиклей, таких как "a", "the", "упомянутый" и т.д., должно читаться, чтобы перечислять один или более указанных элементов, пока формула изобретения не перечислит явное ограничение до противоположного.
Изобретение было описано иллюстративным образом, и должно быть понятно, что терминология, которая была использована, предполагает быть скорее в сущности слов описания, чем ограничения. Многие модификации и вариации настоящего изобретения возможны в свете вышеописанных учений, и изобретение может быть применено на практике иначе, чем конкретно описано.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАРЯД ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2709153C2 |
| СПОСОБ И УСТРОЙСТВО НАВИГАЦИИ | 2015 |
|
RU2643214C2 |
| УСТРОЙСТВО И УЗЕЛ ДЛЯ ОБНАРУЖЕНИЯ ПАРАМЕТРОВ ШИН ПРОХОДЯЩИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2651352C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2682412C1 |
| СПОСОБ УСТАНОВКИ ПОРОГОВОГО ДАВЛЕНИЯ В ШИНАХ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2554850C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ РАСПЫЛЕНИЯ ВОДЫ | 2021 |
|
RU2768372C1 |
| СПОСОБ КОНТРОЛЯ ЗЕРКАЛ БОКОВОГО ВИДА В АВТОНОМНЫХ ТРАНСПОРТНЫХ СРЕДСТВАХ, КОМПЬЮТЕР И ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2708998C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ПАССИВНОГО ДОСТУПА | 2015 |
|
RU2671925C2 |
| РЕАКЦИЯ НА УДАР КАМНЯ О ВЕТРОВОЕ СТЕКЛО | 2018 |
|
RU2684339C1 |
| СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ОТСЛЕЖИВАНИЯ СОДЕРЖИМОГО ИНВЕНТАРЯ | 2014 |
|
RU2686275C2 |
Компьютер программируется так, чтобы определять, что первое транспортное средство и второе транспортное средство находятся в колонне без промежуточного транспортного средства, принимать тепловое изображение шины первого транспортного средства от второго транспортного средства, осуществлять навигацию по маршруту для первого транспортного средства на основе определения того, что тепловое изображение превышает пороговое значение. Улучшается определение износа шины. 3 н. и 17 з.п. ф-лы, 6 ил.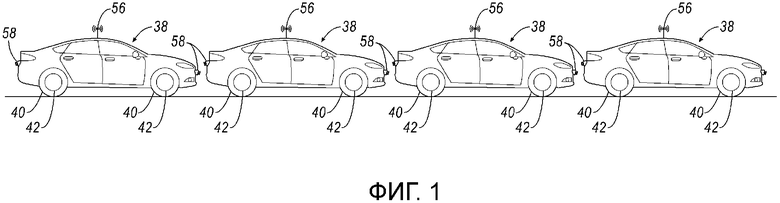
1. Компьютер, запрограммированный для:
определения того, что первое транспортное средство и второе транспортное средство находятся в колонне без промежуточного транспортного средства;
приема теплового изображения шины первого транспортного средства от второго транспортного средства и
осуществления навигации по маршруту для первого транспортного средства на основе определения того, что тепловое изображение превышает пороговое значение.
2. Компьютер по п. 1, в котором определение того, что тепловое изображение превышает пороговое значение, включает определение того, что средняя температура по ширине шины превышает пороговое значение.
3. Компьютер по п. 1, в котором определение того, что тепловое изображение превышает пороговое значение, включает определение того, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
4. Компьютер по п. 1, дополнительно запрограммированный для запрашивания теплового изображения шины при определении того, что окружающая обстановка является по меньшей мере одной из сухой и темной.
5. Компьютер по п. 1, дополнительно запрограммированный для запрашивания теплового изображения шины при определении того, что первое и второе транспортные средства движутся по прямой дороге.
6. Компьютер по п. 1, дополнительно запрограммированный для запрашивания теплового изображения шины при определении того, что шина достигла давления плато.
7. Компьютер по п. 1, дополнительно запрограммированный для запрашивания теплового изображения шины при приеме предупреждения о низком давлении шины.
8. Компьютер по п. 1, дополнительно запрограммированный для определения того, что шина нуждается в замене до завершения первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение.
9. Компьютер по п. 8, дополнительно запрограммированный для передачи запроса касательно запасной шины ближайшим транспортным средствам при определении того, что в первом транспортном средстве отсутствует запасная шина.
10. Компьютер по п. 1, дополнительно запрограммированный для осуществления навигации по маршруту, имеющему более гладкие дороги, чем первоначально запланированный маршрут, при определении того, что тепловое изображение превышает пороговое значение.
11. Компьютер по п. 1, дополнительно запрограммированный для передачи запроса изменения в относительной позиции в колонне и для запроса теплового изображения шины при изменении относительной позиции.
12. Компьютер по п. 1, дополнительно запрограммированный для выдачи команды термографической камере первого транспортного средства на захват теплового изображения шины второго транспортного средства.
13. Компьютер, запрограммированный для:
идентифицирования устройства, имеющего термографическую камеру, обращенную к шине транспортного средства;
запрашивания теплового изображения шины от устройства и
осуществления навигации по маршруту для транспортного средства при определении того, что тепловое изображение превышает пороговое значение.
14. Компьютер по п. 13, в котором определение того, что тепловое изображение превышает пороговое значение, включает определение того, что средняя температура по ширине шины превышает пороговое значение.
15. Компьютер по п. 13, в котором определение того, что тепловое изображение превышает пороговое значение, включает определение того, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
16. Способ управления транспортным средством, при котором:
определяют то, что первое транспортное средство и второе транспортное средство находятся в колонне без промежуточного транспортного средства;
принимают тепловое изображение шины первого транспортного средства от второго транспортного средства и
осуществляют навигацию по маршруту для первого транспортного средства при определении того, что тепловое изображение превышает пороговое значение.
17. Способ по п. 16, при котором при определении того, что тепловое изображение превышает пороговое значение, определяют, что средняя температура по ширине шины превышает пороговое значение.
18. Способ по п. 16, при котором при определении того, что тепловое изображение превышает пороговое значение, определяют, что разница температур между плечевой зоной и средней точкой по ширине шины превышает пороговое значение.
19. Способ по п. 16, при котором дополнительно определяют, что шина нуждается в замене до завершения первоначально запланированного маршрута, в ответ на тепловое изображение, превышающее пороговое значение.
20. Способ по п. 16, при котором дополнительно осуществляют навигацию по маршруту, чтобы иметь более гладкие дороги, чем первоначально запланированный маршрут, при определении того, что тепловое изображение превышает пороговое значение.
| KR 2014145761 A, 24.12.2014 | |||
| РАСПЫЛИТЕЛЬ ЖИДКОСТИ | 2015 |
|
RU2593109C1 |
| JP 2005351705 A, 22.12.2005 | |||
| JP 2005096554 A, 14.04.2005. | |||

