Изобретение относится к авиационному приборостроению, в частности к бортовым комплексным системам, обеспечивающим боевое применение средств противодействия и поражения.
Из известных комплексных систем в качестве прототипа выбирается система, блок-схема которой приведено в книге [1] Мубаракшина Р.В., Балуева В.М., Воронова Б.В. "Прицельные системы стрельбы", часть 1, издание ВВИА им. Жуковского, 1973 г., стр. 97. Система-прототип содержит установленные на борту летательного аппарата бортовую радиолокационную станцию (БРЛС), бортовую оптиколокационную станцию (БОЛС), блок выбора параметров целеуказания (БВП).
При захвате цели и одновременном целеуказании БРЛС и БОЛС в БВП осуществляется выбор параметров целеуказания и их передача потребителям (прицельная система, система управления оружием, система управления летательным аппаратом). БРЛС формирует и передает в БВП дальность до цели D1 = D + d и углы визирования цели A1 = A + a (здесь D, A - точные значения параметров; d, a - погрешности), БОЛС формирует и передает в БВП параметры целеуказания A0 = A и D0 = D практически без погрешностей и сигналы отказов (срывов, отключений) - U3 (отказ по дальности), U4 (отказ по углам визирования).
В соответствии с сигналами U3, U4 на первом и втором выходах БВП выбираются и выдаются потребителям следующие парные комбинации параметров целеуказания:
A0, D0; A1, D1; A0, D1; A1, D0.
Очевидно, что в трех последних комбинациях имеют место погрешности a и d.
Техническим результатом, обеспечиваемым при использовании предлагаемого технического решения, является повышение точности работы системы.
Достигается технический результат тем, что в комплексную систему целеуказания, содержащую бортовую радиолокационную станцию, блок выбора параметров целеуказания, а также бортовую оптиколокационную станцию, первый-четвертый выходы которой подключены соответственно к пятому-восьмому входам блока выбора параметров целеуказания, дополнительно введены блок алгебраического суммирования и последовательно соединенные по первому и второму выходам - входам блок переключения, блок интеграторов, блок умножения и блок деления, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам блока умножения, третий и четвертый выходы которого подключены соответственно к первому и второму входам блока переключения, на третий и четвертый входы которого подключены соответственно третий и четвертый выходы бортовой оптиколокационной станции, первый и второй выходы которой подключены соответственно к первому и второму входам блока алгебраического суммирования, первый и второй выходы которого подключены соответственно к шестому и седьмому входам блока умножения, пятый и шестой выходы которого подключены соответственно к третьему и четвертому входам блока алгебраического суммирования, третий и четвертый выходы которого подключены к девятому и десятому входам блока выбора параметров целеуказания, первый и второй выходы которого подключены соответственно к третьему и четвертому входам блока деления и соответственно к восьмому и девятому входам блока умножения, на десятый вход которого подключен третий выход блока интеграторов, причем первый и второй выходы бортовой радиолокационной станции подключены соответственно к пятому и шестому входам блока алгебраического суммирования.
На чертеже представлена блок-схема предлагаемой системы, содержащей:
1 - бортовую радиолокационную станцию БРЛС, 2 - блок выбора параметров целеуказания БВП, 3 - бортовую оптиколокационную станцию БОЛС, 4 - блок переключения БП, 5 - блок деления БД, 6 - блок интеграторов БИ, 7 - блок умножения БУ, 8 - блок алгебраического суммирования БАС.
Примеры технического выполнения блоков БАС 8, БИ 6, БУ 7, БУ 5 приведены в книге [2] Тетельбаума Ю.М. "400 схем для АВМ", Москва, Энергия, 1978 г., стр. 8, стр. 9, стр. 53.
Описание БРЛС 1 и БОЛС 3 представлены соответственно в книге [3] Давыдова П.С. "Авиационная радиолокация", Москва, Транспорт, 184 г., в книге [4] Лазарева Л.П. "Инфракрасные и световые приборы самонаведения летательных аппаратов", Москва, Машиностроение, 1970 г., и в книге [5] Малашина М.С. и др. "Основы проектирования лазерных локационных систем", Москва, Высшая школа, 1983.
Погрешности БРЛС 1 можно представить в виде:
где  систематические составляющие;
систематические составляющие; флюктуационные составляющие типа белого шума;
флюктуационные составляющие типа белого шума; выбранные в БВП 2 параметры целеуказания.
выбранные в БВП 2 параметры целеуказания.
Система работает следующим образом.
При обнаружении и сопровождении цели посредством БОЛС 3 на пятый - восьмой входы БВП 2 поступают соответственно сигналы:
с первого - четвертого выходов БОЛС 3 - сигнал дальности D0 = D, сигнал углов визирования цели A0 = A, сигнал отказа (сбоя, отключения) по дальности U3 > 0 (U3 < 0 - исправность), сигнал отказа по углам визирования цели U4 > 0 (U4 < 0 - исправность).
С первого и второго выходов БОЛС 3 сигналы параметров D0, A0 поступают соответственно на первый и второй входы БАС 8.
С третьего и четвертого выходов БОЛС 3 сигналы U3 и U4 поступают соответственно на третий и четвертый входы БП 4.
При одновременной локации цели посредством БРЛС 1, сигналы дальности D1 = D +d, и углов визирования A1 = A + a (здесь d, a - погрешности) с первого и второго выходов БРЛС 1 поступают соответственно на пятый и шестой входы БАС 8.
Сигналы откорректированной дальности Dк и откорректированных углов визирования цели Aк с третьего и четвертого выходов БАС 8 поступают соответственно на девятый и десятый входы БВП 2.
БВП 2 выполнен на двух стандартных релейных элементах, выходы которых подключены соответственно к первому и второму выходам БВП 2.
На одном релейном элементе проводится коммутация сигналов D0 и Dк (с пятого и девятого входов БВП 2):
- сигнал на выходе этого релейного элемента и, соответственно, на первом выходе БВП 2  при U3 < 0 (исправность) и
при U3 < 0 (исправность) и  при U3 > 0 (отказ, сбой).
при U3 > 0 (отказ, сбой).
На другом релейном элементе проводится коммутация сигналов A0 и Aк (с шестого и десятого входов БВП 2):
- сигнал на выходе этого релейного элемента и, соответственно, на втором выходе БВП 2  при U4 < 0 (исправность) и
при U4 < 0 (исправность) и  при U4 > 0 (отказ, сбой).
при U4 > 0 (отказ, сбой).
С первого и второго выходов БВП 2 сигналы  выдаются потребителям и поступают соответственно на третий и четвертый входы БД 5 и на восьмой и девятый входы БУ 7.
выдаются потребителям и поступают соответственно на третий и четвертый входы БД 5 и на восьмой и девятый входы БУ 7.
С первого, второго и третьего выходов БИ 6 сигналы x1, x2, x0 поступают соответственно на первый, второй и десятый входы БУ7 с первого и второго выходов сигналы произведений  поступают на первый и второй входы БД5, где формируются сигналы
поступают на первый и второй входы БД5, где формируются сигналы  поступающие на третий, четвертый и пятый входы БУ7, где формируются сигналы x1 • D, x2 • A/D, которые с пятого и шестого выходов БУ7 поступают на третий и четвертый входы БАС8, где формируются сигналы
поступающие на третий, четвертый и пятый входы БУ7, где формируются сигналы x1 • D, x2 • A/D, которые с пятого и шестого выходов БУ7 поступают на третий и четвертый входы БАС8, где формируются сигналы



Сигналы (Ak - A0), (Dk - D0) с первого и второго выходов БАС8 поступают на шестой и седьмой входы БУ7, где формируются сигналы
которые с третьего и четвертого выходов БУ7 поступают соответственно на первый и второй входы БП4, являющегося стандартным релейным элементом, подключающим при U3 < 0 (исправность дальномерного канала БОЛС3), U4 < 0 (исправность угломерного канала БОЛС 3) первый и второй входы к своим первым и вторым выходам, подключенным соответственно к первому и второму входам БИ6, где формируются сигналы
 x0= ∫dt = t+T, где T - постоянная времени,
x0= ∫dt = t+T, где T - постоянная времени,
тогда 
 соответственно математические ожидания
соответственно математические ожидания  и дисперсии C1, C2
и дисперсии C1, C2



(здесь σ C1 ---> 0, C2 ---> 0.
C1 ---> 0, C2 ---> 0.
Соответственно на третьем и четвертом выходах БАС8

откуда следует, что при A/D ≈ const, D ≈ const


т.е. откорректированные составляющие значительно точнее величин A1, D1.
При появлении сигналов U3 > 0 (отказ отключение дальномерного канала БОЛС3), U4 > 0 (отказ, отключение угломерного канала БОЛС 3) на третьем и четвертом входах БП 4, с первого и второго выхода БП 4 на первый и второй вход БИ 6 поступают нулевые сигналы, соответственно при C1 ≈ 0, C2 ≈ 0 на первом и втором выходах БИ6 в момент отключения to >> T запоминаются сигналы 
 и с третьего и четвертого выходов БАС8 соответственно на девятый и десятый входы БВП2 поступают сигналы
и с третьего и четвертого выходов БАС8 соответственно на девятый и десятый входы БВП2 поступают сигналы 
 соответственно на первом и втором выходе БВП2 будут выбраны параметры D0 (или Dk), A0 (или Ak), при этом Dk и Ak значительно точнее параметров A1 и D1 в прототипе, что свидетельствует о достижении технического результата.
соответственно на первом и втором выходе БВП2 будут выбраны параметры D0 (или Dk), A0 (или Ak), при этом Dk и Ak значительно точнее параметров A1 и D1 в прототипе, что свидетельствует о достижении технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2079109C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1994 |
|
RU2081396C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096263C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2079108C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА ПРИ ПОСАДКЕ | 1996 |
|
RU2102281C1 |
Изобретение относится к авиационному приборостроению, в частности к бортовым комплексным системам, обеспечивающим боевое применение средств противодействия и поражения. Техническим результатом является повышение точности работы системы. Технический результат достигается за счет того, что система содержит бортовую радиолокационную станцию, блок выбора параметров целеуказания, бортовую оптиколокационную станцию, блок переключения, блок деления, блок интеграторов, блок умножения, блок алгебраического суммирования. 1 ил.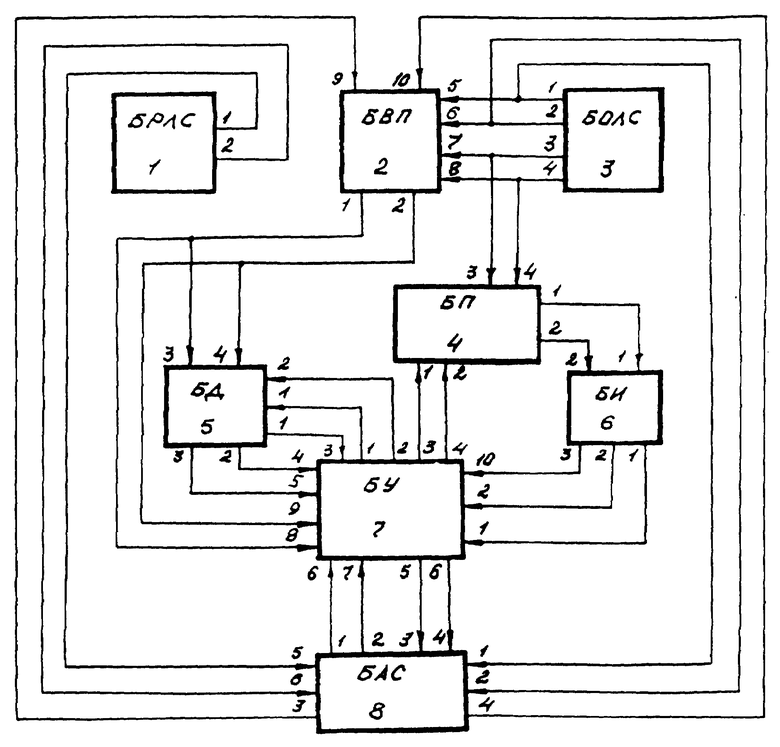
Комплексная система целеуказания, содержащая бортовую радиолокационную станцию, блок выбора параметров целеуказания, а также бортовую оптиколокационную станцию, первый - четвертый выходы которой подключены соответственно к пятому - восьмому входам блока выбора параметров целеуказания, отличающаяся тем, что в нее дополнительно введены блок алгебраического суммирования и последовательно соединенные по первому и второму выходам - входам блок переключения, блок интеграторов, блок умножения и блок деления, первый, второй и третий выходы которого подключены соответственно к третьему, четвертому и пятому входам блока умножения, третий и четвертый выходы которого подключены соответственно к первому и второму входам блока переключения, на третий и четвертый входы которого подключены соответственно третий и четвертый выходы бортовой оптиколокационной станции, первый и второй выходы которой подключены соответственно к первому и второму входам блока алгебраического суммирования, первый и второй выходы которого подключены соответственно к шестому и седьмому входам блока умножения, пятый и шестой выходы которого подключены соответственно к третьему и четвертому входам блока алгебраического суммирования, третий и четвертый выходы которого подключены соответственно к девятому и десятому входам блока выбора параметров целеуказания, первый и второй выходы которого подключены соответственно к третьему и четвертому входам блока деления и, соответственно, к восьмому и девятому входам блока умножения, на десятый вход которого подключен третий выход блока интеграторов, причем первый и второй выходы бортовой радиолокационной станции подключены соответственно к пятому и шестому входам блока алгебраического суммирования.
| Прицельные системы стрельбы | |||
| /Под ред | |||
| Мубаракшина Р.В | |||
| - Изд | |||
| ВВИА им.Жуковского, 1973, ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 4800389 A, 24.01.89 | |||
| US 4924230 A, 08.05.90 | |||
| Тетельбаум Ю.М | |||
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| - М.: Энергия, 1978, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Давыдов П.С | |||
| Авиационная радиолокация | |||
| - М.: Транспорт, 1984 | |||
| Лазарев Л.П | |||
| Инфракрасные и световые приборы самонаведения летательных аппаратов | |||
| - М.: Машиностроение, 1970 | |||
| Малашин М.С | |||
| и др | |||
| Основы проектирования лазерных локационных систем | |||
| - М.: Высшая школа, 1983. | |||

