Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами бескарданного типа.
Известен динамически настраиваемый гироскоп (ДНГ), используемый в системах инерциального управления объектами, на основе преобразования информации об угловых скоростях, содержащий корпус, ротор и датчик угла, закрепленные во вращающейся герметичной ампуле, электропривод, высокоскоростные газодинамические опоры, опорные поверхности которых выполнены в корпусе полусферическими, устройство передачи информации от датчика к корпусу и устройства передачи энергии от корпуса. Во внутренней полости первого фланца установлены герметичная ампула и преобразователь сигнала датчика угла в код, а во внутреннюю полость второго фланца установлены элементы электропривода и генератора опорных импульсов (патент RU 2101679 С1, 10.01.1998).
Прототип изобретения имеет электромагнитный датчик момента, работающий через стенку ампулы. Принцип действия электромагнитного датчика момента основан на взаимодействии (притягивании) легко намагничивающегося тела (ротора) и магнитного поля катушки. Датчик момента представляет собой две симметрично (относительно оси ротора) расположенные катушки, которые взаимодействуют с ротором. Недостатком такой конструкции является нелинейность характеристики датчика момента, низкие значения развиваемого момента. Кроме того, такой датчик момента чувствителен к ферромагнитным включениям в материале ампулы гироскопа (титановом сплаве ВТ-5).
Эти недостатки препятствуют использованию электромагнитного датчика момента в конструкции гироскопа в качестве точного датчика бескарданных систем и не позволяют использовать гироскоп в качестве датчика угловой скорости для работы в диапазоне угловых скоростей порядка 50°/сек.
Техническим результатом заявляемого изобретения является создание датчика угловой скорости на базе модуляционного гироскопа и повышение точности измерения угловой скорости за счет линейности датчика момента магнитоэлектрического типа.
Указанный технический результат достигается тем, что датчик угловой скорости на базе модуляционного гироскопа, включающий ротор в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель, датчик момента, вынесенные из вакуумированного объема, устройство съема информации и управления ротором, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя и синусно-косинусного преобразователя, содержит магнитоэлектрический датчик момента, состоящий из катушек и двух постоянных магнитов с радиальной текстурой намагничивания, установленных диаметрально противоположно в ротор гироскопа; причем магниты и соответствующие им магнитопроводы помещены на роторе, а обмотки датчика момента расположены за стенкой герметичной ампулы и пронизываются радиальным полем постоянных магнитов.
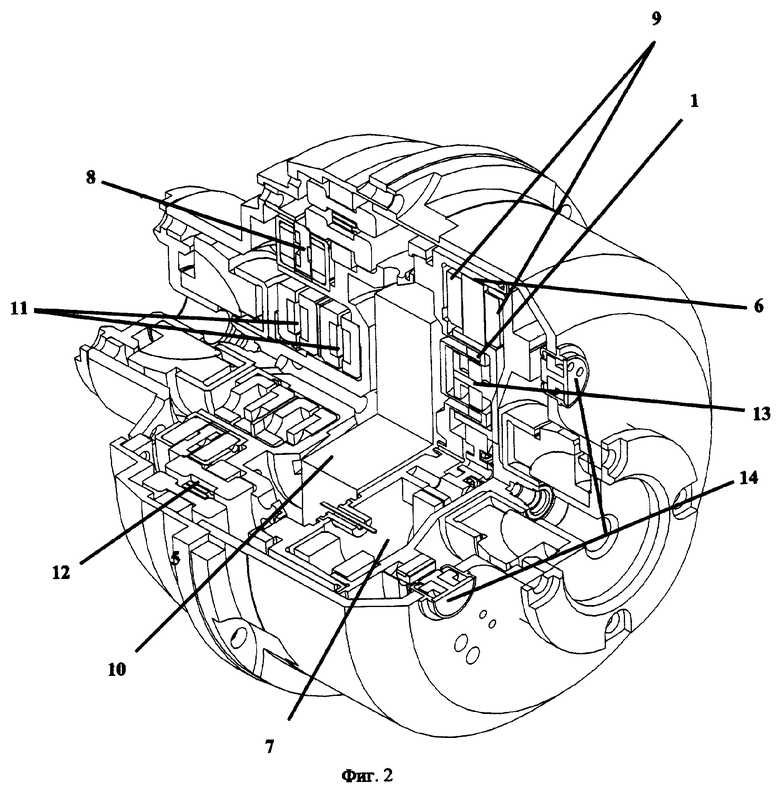
На фиг.1 представлена конструкция ротора с магнитоэлектрическим датчиком момента, на фиг.2 - конструкция датчика угловой скорости на базе модуляционного гироскопа.
Магнитоэлектрический датчик момента состоит из магнитной системы и катушек. Магнитная система 2 представляет собой два магнита 3, расположенных в двух пазах ротора 5 и образующих между собой рабочий зазор в каждом плече. Магниты выполнены из материала неодим-железо-бор, ротор выполнен из стали 21НКМТ, магнитопровод 4 - из материала 27КХ. Катушки 1 (фиг.2) намотаны проводом ПЭВ, вставлены и залиты в пазы ампулы, находящиеся за стенкой ампулы. Катушки отделены от внутреннего объема ампулы стенкой толщиной 300 микрон. Таким образом достигается полная герметизация ампулы, причем внутри ампулы нет органических включений, обладающих газовыделением.
На катушки, помещенные в магнитное поле магнитов, действует сила Ампера. При пропускании тока одной полярности через катушки происходит притягивание одного конца ротора и отталкивание другого. Таким образом, используются обе полуволны синусоиды, подаваемой на датчик момента, а не одна полуволна, пропущенная электронным диодом, как в электромагнитном датчике момента.
Электромагнитные силы не чувствительны к знаку притяжения (отталкивания) ротора от катушки, поэтому используют электронные диоды, когда одна полуволна подается на один электромагнит, а другая полуволна синусоиды - на другой электромагнит. Коэффициент полезного действия магнитоэлектрического датчика момента в этом случае увеличивается в 2 раза.
За счет применения постоянных магнитов, а следовательно, за счет более высоких значений индукции магнитного поля в зазоре можно увеличить крутизну датчика момента до значений, позволяющих парировать угловую скорость до 50°/сек. Расчет показывает, что датчик момента развивает момент 48 Гсм при токе 0,2 А.
Датчик угловой скорости на базе модуляционного гироскопа представлен на фиг.2. Ротор 6, имеющий неравные экваториальные моменты инерции и равножесткий упругий подвес крестообразного профиля сечения торсионов с вырожденным промежуточным кольцом, с диаметрально противоположно установленными постоянными магнитами, охваченными магнитопроводами, изготовленными из магнитомягкого материала, помещен в вакуумированную вращающуюся вместе с ротором ампулу 7, приводимую во вращение с помощью торцевого электрического двигателя 8 с резонансной угловой скоростью Ω. Устройство съема информации с ротора выполнено во вращающейся вместе с ротором системе координат в виде емкостного датчика угла 9, емкостно-частотного преобразователя 10, токоподвода-токосъема 11, служащего для запитки емкостно-частотного преобразователя и съема информации с ротора.
Генератор с внешним возбуждением 12 вместе с двумя магнитоэлектрическими датчиками момента 13 служит для управления ротором во вращающейся системе координат. Генераторы опорных импульсов 14 формируют опорное напряжение для разложения информации на две составляющие. Такой датчик угловой скорости имеет две оси чувствительности и заменяет собой два классических датчика угловой скорости.
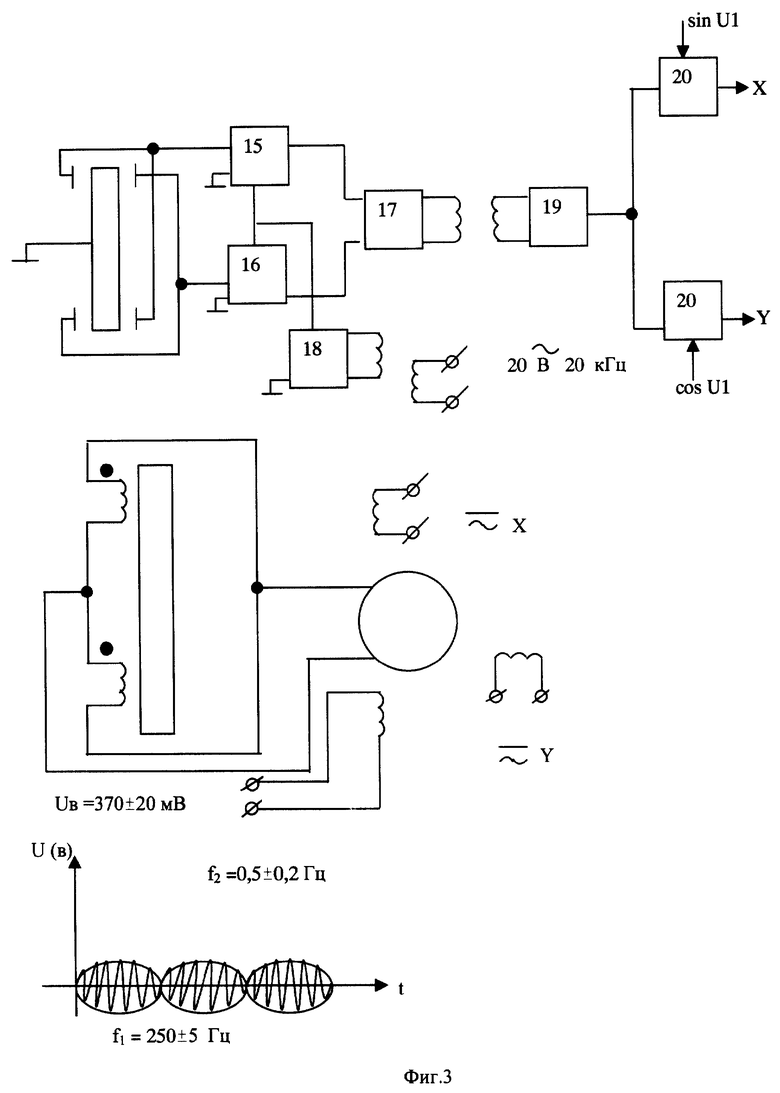
Блок-схема обработки информации и управления ротором показана на фиг.3. Колебания ротора от действия входной угловой скорости в инерциальном пространстве преобразуются емкостным дифференциальным датчиком угла и емкостно-частотным преобразователем, включающим в себя два автогенератора 15 и 16, смеситель 17, блок питания 18, в девиацию частоты 2Δf, идущей на частоте вращения ротора Ω. Девиация частоты передается с вращающейся части прибора на неподвижную с помощью индуктивного токосъема. Питание блока питания осуществляется через аналогичный индуктивный токоподвод, питающийся напряжением 20 вольт с частотой 20 кГц от автономного источника питания. Информация с токосъема поступает на вход частотного детектора 19 и далее на вход двух фазовых демодуляторов 20, опорным напряжением которых является импульсное напряжение sinU1 и cosU1, вырабатываемое двумя катушками генераторов опорных импульсов 14. С выходов фазовых демодуляторов идет информация в виде постоянного тока или напряжения о двух составляющих входной угловой скорости в инерциальном пространстве.
Блок-схема управления ротором включает в себя синусно-косинусный преобразователь (он же генератор с внешним возбуждением), состоящий из трех статорных обмоток и одной роторной обмотки, находящейся на валу, двух катушек, находящихся в пазах за стенкой герметизированной ампулы, ротора с магнитопроводом и двумя постоянными магнитами. При подаче в статорные обмотки генератора с внешним возбуждением постоянных или медленно меняющихся токов управления при вращении ротора с резонансной угловой скоростью Ω в роторной обмотке наводится ЭДС с частотой вращения. Роторная обмотка генератора с внешним возбуждением нагружена на обмотки датчика момента. Вследствие того, что статор генератора с внешним возбуждением работает на постоянном сигнале, наблюдается явление гистерезиса и остаточной намагниченности железа статора.
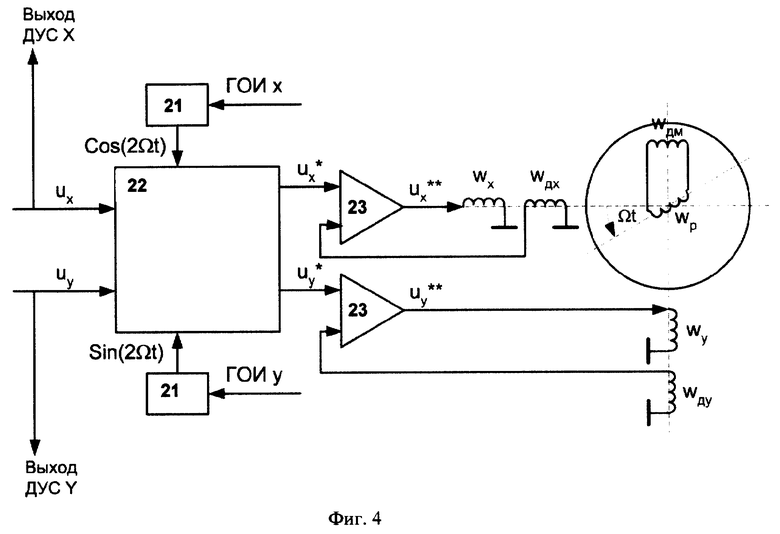
На фиг.4 показана блок-схема устранения гистерезиса за счет формирования переменного сигнала на двойной частоте вращения. Для устранения гистерезиса вместо постоянных сигналов на статор генератора подаются переменные сигналы с двойной частотой вращения, сформированные таким образом, чтобы обеспечить нужный сигнал на выходе. Блоки 21 формируют сигналы sin2 Ωt и cos2 Ωt из импульсов генераторов опорных импульсов. Блок 22 формирует управляющие сигналы. Блоки 23 подают соответствующие токи в статорные обмотки генератора с внешним возбуждением Wx и Wу. С выходов фазовых демодуляторов Ux и Uу снимается информация о входной угловой скорости датчика угловой скорости на базе модуляционного гироскопа. Для устранения влияния температуры генератора на статоре расположены дополнительные обмотки Wдх и Wду. Напряжение, наведенное в этих обмотках, подается на входы блоков 23. Таким образом, создается обратная связь, обеспечивающая независимость магнитного потока статора от температуры.
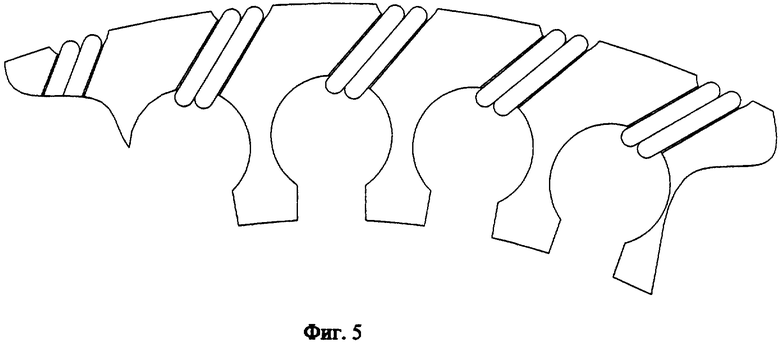
Для окончательного устранения гистерезиса существует третья обмотка в статоре генератора с внешним возбуждением. Она непрерывно задействована в момент работы прибора. Конструктивно третья обмотка укладывается на статоре (помимо двух обмоток управления) и показана на фиг.5.
Создание датчика угловой скорости на базе модуляционного гироскопа достигается применением модуляционного принципа действия прибора, имеющего ротор с неравными экваториальными моментами инерции и равножесткий упругий подвес с торсионами крестообразного сечения, причем в роторе диаметрально противоположно установлены два постоянных магнита с радиальной текстурой намагничивания, а для концентрации индукции в зазоре магниты помещены в магнитомягкие магнитопроводы в совокупности с емкостно-частотным преобразованием сигнала, съемом полезной информации и управлением ротора во вращающейся системе координат, а также применением ампульного варианта герметизации ротора. Суть модуляционного принципа действия состоит в формировании прикладываемых к ротору датчика угловой скорости на базе модуляционного гироскопа модулированных внешних моментов с помощью неравенства экваториальных моментов инерции ротора.
Проведенные испытания показали, что применение предлагаемого технического решения позволит выйти на уровень:
- точностей 0,005°/час;
- перегрузочной способности 40 g;
- ресурса работы 100 тыс. часов;
- парируемой угловой скорости 2°/сек.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| СПОСОБ УСТРАНЕНИЯ ТРЕНДА В МОДУЛЯЦИОННОМ ГИРОСКОПЕ | 2003 |
|
RU2262074C2 |
| АЛГОРИТМ ГАРАНТИРОВАННОГО ТРОГАНИЯ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2008 |
|
RU2391629C2 |
| СПОСОБ ГЕРМЕТИЗАЦИИ АМПУЛЫ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2282838C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2282825C2 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами бескарданного типа. Датчик угловой скорости на базе модуляционного гироскопа содержит ротор в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель, датчик момента, вынесенные из вакуумированного объема, устройство съема информации и управления ротором, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя и синусно-косинусного преобразователя, а также магнитоэлектрический датчик момента, состоящий из катушек и двух постоянных магнитов с радиальной текстурой намагничивания, установленных диаметрально противоположно в ротор гироскопа; причем магниты и соответствующие им магнитопроводы помещены на роторе, а обмотки датчика момента расположены за стенкой герметичной ампулы и пронизываются радиальным полем постоянных магнитов. Технический результат - повышение точности измерения угловой скорости за счет линейности датчика момента магнитоэлектрического типа. 5 ил.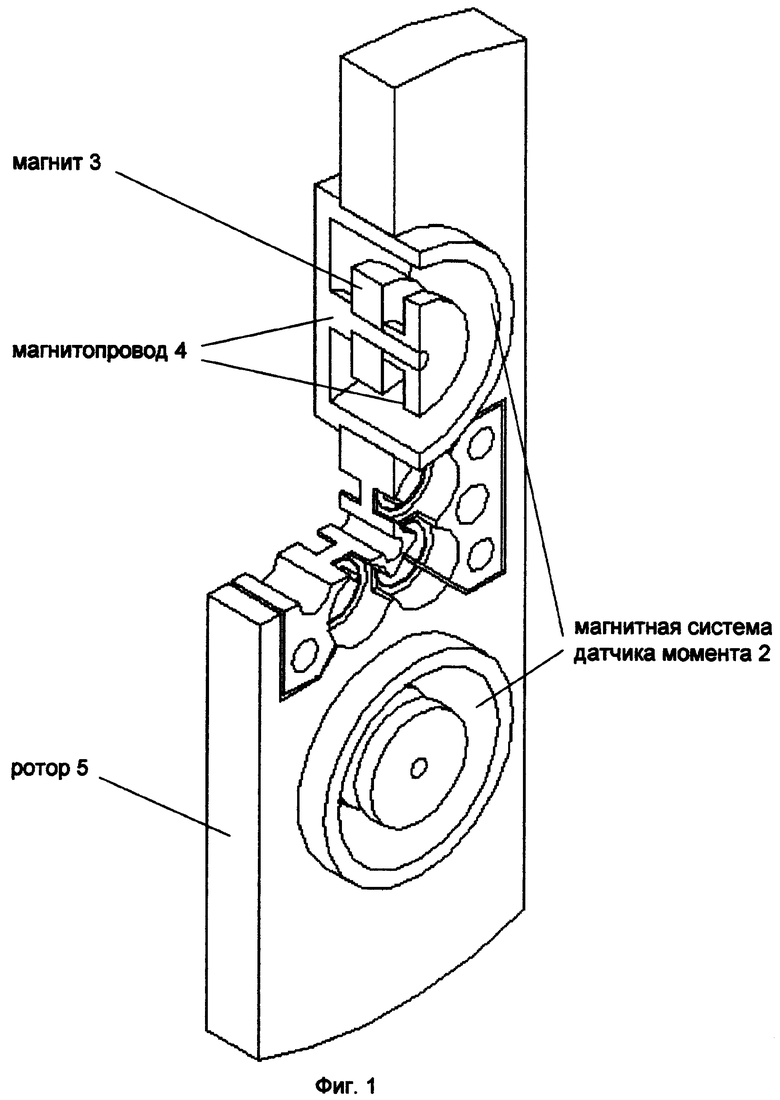
Датчик угловой скорости на базе модуляционного гироскопа, содержащий ротор в виде параллелепипеда на упругом равножестком подвесе, помещенный в герметизированную, вакуумированную, вращающуюся вместе с ротором камеру, газодинамические сферические опоры, двигатель, датчик момента, вынесенные из вакуумированного объема, устройство съема информации и управления ротором, выполненное во вращающейся системе координат в виде емкостно-частотного преобразователя и синусно-косинусного преобразователя, отличающийся тем, что он содержит магнитоэлектрический датчик момента, состоящий из катушек и двух постоянных магнитов с радиальной текстурой намагничивания, установленных диаметрально противоположно в ротор гироскопа причем магниты и соответствующие им магнитопроводы помещены на роторе, а обмотки датчика момента расположены за стенкой герметичной ампулы и пронизываются радиальным полем постоянных магнитов.
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ГИРОСКОП | 2002 |
|
RU2210735C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| RU 93026419 A, 27.05.1996 | |||
| US 4316394 A, 23.02.1982 | |||
| US 4357837 A, 09.11.1982. | |||

