1. Область техники, к которой относится изобретение
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов - самолетов, ракет, морских судов.
Одной из важнейших задач, решаемых системами управления подвижными объектами, является измерение их абсолютной угловой скорости. Для этого используются датчики угловой скорости на базе динамически настраиваемых гироскопов (ДНГ). Совершенствование систем управления ставит перед разработчиками ДНГ цель: повышение точности измерения абсолютной угловой скорости.
2. Уровень техники
Рассмотрим аналоги предлагаемого изобретения.
2.1 Библиографические данные аналогов изобретения
[1] G01С 19/22. Pick off, torquer, and reference signal generator for free rotor gyroscopes. Патент США №4487083. Авторы Thomas R. Quermann, Suffolk, N.Y.
2.2 Наиболее близким к заявляемому изобретению аналогом (прототипом) является устройство по патенту США №4487083. Общими признаками с предлагаемым изобретением являются: корпус, приводной вал, расположенный в корпусе, ротор, вращающийся вокруг оси вращения вала, упругий подвес, передающий вращение от вала к ротору и обеспечивающий ему две угловые степени свободы относительно вала, кольцевой постоянный магнит, установленный на роторе и намагниченный в радиальном направлении, обеспечивающий в кольцевом канале между магнитом и ротором магнитную индукцию, регулярно изменяющуюся от минимальной до максимальной величины несколько раз за один оборот ротора, катушки, образующие статор двухкоординатного датчика угла, установленный на корпусе и вставленный в кольцевой канал ротора, двигатель, состоящий из ротора и статора.
Недостатком этого прототипа является значительный выходной сигнал датчика угла при отсутствии отклонений ротора вокруг осей упругого подвеса (нулевой сигнал датчика угла), приводящий к ошибкам измерения абсолютной угловой скорости.
3. Раскрытие изобретения
3.1 Техническим результатом предлагаемого изобретения является повышение точности измерения абсолютной угловой скорости.
Технический результат достигается наличием существенного признака - введением в конструкцию ДНГ специальных втулок, обеспечивающих разворот обмоток датчика угла вокруг точки пересечения осей упругого подвеса ротора с осью вращения и фиксацию их относительно корпуса в положении, обеспечивающем минимальные выходные сигналы датчика угла при отсутствии отклонений ротора ДНГ относительно корпуса.
Сущность изобретения заключается в том, что введение в конструкцию втулок специальной формы позволяет на этапе изготовления прибора минимизировать нулевые сигналы двухкоординатного датчика угла и тем самым повысить точность измерения абсолютной угловой скорости.
3.2 Заявляемое изобретение направлено на решение задачи обеспечения возможности разворота статора датчика угла относительно корпуса вокруг точки пересечения осей упругого подвеса ротора с осью вращения на этапе изготовления прибора.
Для решения этой задачи статор датчика угла устанавливается на втулку, имеющую сферическую поверхность с центром в точке пересечения осей упругого подвеса ротора ДНГ с осью вращения и сопрягающуюся с конической поверхностью второй втулки, устанавливаемой жестко на корпус. Сопряжение поверхности сферы первой втулки с поверхностью конуса второй втулки обеспечивает две угловые степени свободы статора датчика угла относительно корпуса и позволяет выставить и закрепить статор датчика угла в положении, обеспечивающем минимальные нулевые сигналы двухкоординатного датчика угла.
Решение данной задачи обеспечивает повышение точности измерения абсолютной угловой скорости.
Существенные признаки, характеризующие предлагаемое изобретение и общие с прототипом [1]: корпус, приводной вал, ротор, упругий подвес, кольцевой постоянный магнит, статор двухкоординатного датчика угла, двигатель. Существенные признаки, характеризующие предлагаемое изобретение и отличающиеся от прототипа: наличие двух втулок специальной формы между статором двухкоординатного датчика угла и корпусом.
4. Краткое описание чертежей
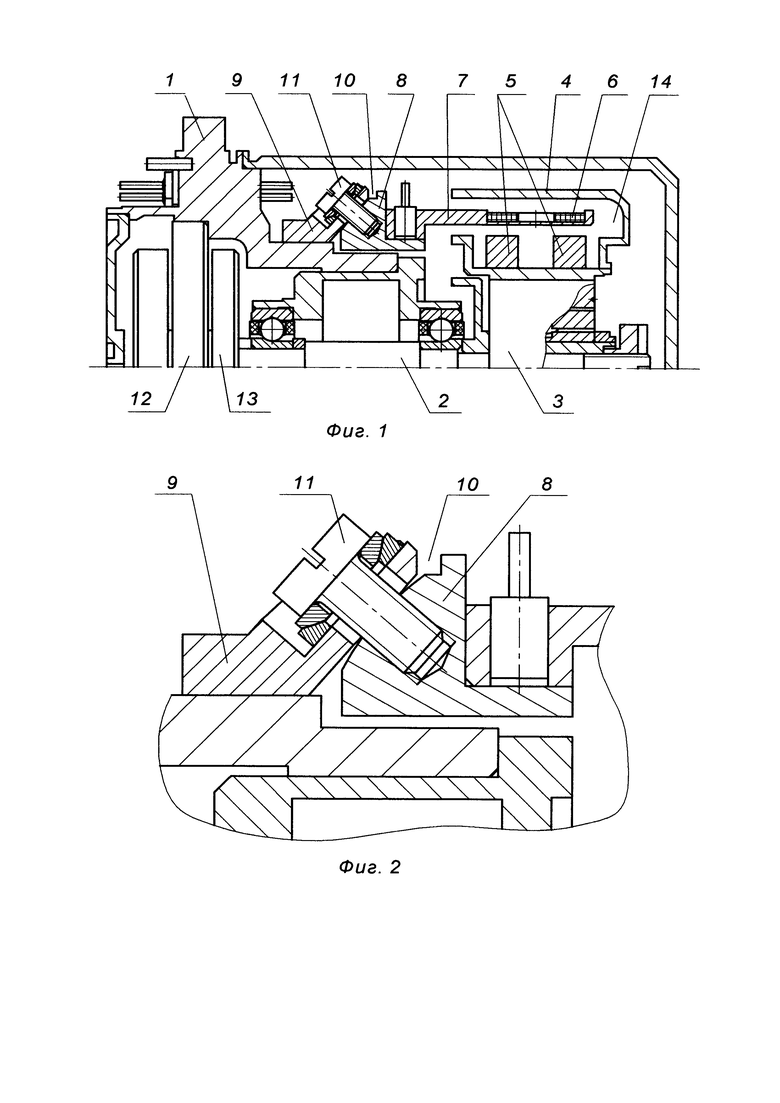
На фиг. 1 представлена конструкция заявляемого устройства.
На фиг. 2 в укрупненном масштабе показан узел двух сопрягающихся между собой втулок.
На фигурах обозначено:
1 - корпус;
2 - вал;
3 - упругий подвес;
4 - ротор;
5 - кольцевые магниты с радиальной намагниченностью от центра к периферии;
6 - одна из катушек статора датчика угла;
7 - статор двухкоординатного датчика угла;
8 - втулка со сферической поверхностью;
9 - втулка с конической поверхностью;
10 - кольцевой регулировочный паз;
11 - винт (винты);
12 - ротор двигателя;
13 - статор двигателя;
14 - кольцевой канал ротора.
5. Осуществление изобретения
5.1 Как и в прототипе, предлагаемый динамически настраиваемый гироскоп содержит корпус 1, вал 2, упругий подвес 3, установленный на него ротор 4, кольцевой магнит с радиальной намагниченностью от центра к периферии 5, обмотки 6, образующие статор двухкоординатного датчика угла 7.
В отличие от прототипа, в предлагаемый роторный вибрационный гироскоп введены втулки специальной формы 8 и 9, обеспечивающие возможность выставки статора датчика угла относительно корпуса в положение, обеспечивающее минимальный нулевой сигнал по обоим каналам двухкоординатного датчика угла, причем разворот статора осуществляется вокруг точки пересечения осей упругого подвеса с осью вращения гироскопа.
5.2 Минимизация нулевого сигнала датчика угла при помощи предлагаемого устройства производится следующим образом.
Вал 2 приводится во вращение двигателем, имеющим ротор 12 и статор 13, с угловой скоростью 0,8…0,9 от скорости резонансной настройки ДНГ, определяемой геометрическими параметрами упругого подвеса. При этом ротор 4 за счет центробежных сил устанавливается перпендикулярно к оси вращения вала 2. Благодаря наличию переменного магнитного поля в кольцевом канале 14 в катушках 6 датчика угла наводится ЭДС, частота которой равняется частоте вращения ротора, умноженной на число периодов переменного магнитного поля, а амплитуда прямо пропорциональна углу между ротором и статором датчика угла. Вследствие неидеальности формы, размеров и положения катушек в статоре этот угол может достигать 40 дуговых минут. В этом положении производится измерение амплитуды выходных сигналов датчика угла по двум координатам. Используя кольцевой регулировочный паз 10, при ослабленной затяжке винтов 11, специальным инструментом производится отклонение статора 7 вокруг двух осей чувствительности датчика угла. За счет того, что центр сферической поверхности втулки 8 находится в точке пересечения осей упругого подвеса 3 с осью вращения вала 2, сближение поверхностей статора и вращающегося ротора минимально и достаточно для компенсации нулевого сигнала датчика угла. При достижении минимальных сигналов по обоим каналам датчика угла винты 11 затягиваются и прибор далее эксплуатируется при этом положении статора относительно корпуса.
5.3 Одним из основных параметров, характеризующих точность измерения абсолютной угловой скорости при помощи ДНГ, является погрешность, не зависящая от ускорения. Математическая модель данной погрешности по одному из измерительных каналов α ДНГ описывается выражением

где ωα - погрешность, не зависящая от ускорения;
ωh - диссипативная составляющая погрешности, вызванная поворотом маховика относительно корпуса на единичный положительный угол вокруг оси измерения погрешности;
ωΔk - консервативная составляющая погрешности, вызванная поворотом маховика на единичный положительный угол вокруг оси, перпендикулярной оси измерения погрешности;
α, β - угловое смещение маховика относительно равновесного состояния, вызванное нулевыми сигналами датчика угла;
ω0α - погрешность, не зависящая от ускорения, измеренная при нулевых углах отклонения маховика (α=β=0) и обусловленная различного рода тяжениями (аэродинамическими, магнитными, вибрационными).
Первые два слагаемых в формуле (1) характеризуют погрешность ДНГ, обусловленную нулевыми сигналами датчика угла, приводящими к отклонению ротора от равновесного состояния на углы α и β. При установке статора датчика угла непосредственно на корпус, как описано в прототипе [1], эти углы могут достигать 40 дуговых минут, что приводит к недопустимым погрешностям в соответствии с формулой (1). Благодаря наличию в предлагаемом устройстве двух втулок специальной формы, эти углы можно уменьшить до 1 дуговой минуты, т.е. до 40 раз снизить погрешность ДНГ, обусловленную нулевыми сигналами датчика угла, тем самым повысить точность измерения абсолютной угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
Изобретение относится к гироскопической технике и может быть использовано для измерения абсолютной угловой скорости подвижных объектов. Динамически настраиваемый гироскоп содержит корпус, вал, упругий подвес, установленный на вал и обеспечивающий ротору возможность поворота относительно вала вокруг двух ортогональных осей, ротор, установленный на упругий подвес и имеющий кольцевой магнит, намагниченный в радиальном направлении и имеющий чередующиеся участки большей и меньшей намагниченности, статор двухкоординатного датчика угла, установленный на корпусе и имеющий катушки, вставленные в кольцеобразный канал ротора, при этом между статором двухкоординатного датчика угла и корпусом установлены две втулки, одна из которых присоединена к статору и имеет сферическую поверхность с центром в точке пересечения оси вала с осями подвеса, а вторая, установленная на корпусе, имеет коническую поверхность, сопрягающуюся со сферической поверхностью первой втулки, с возможностью углового смещения первой втулки относительно второй. Технический результат – повышение точности измерения абсолютной угловой скорости. 2 ил.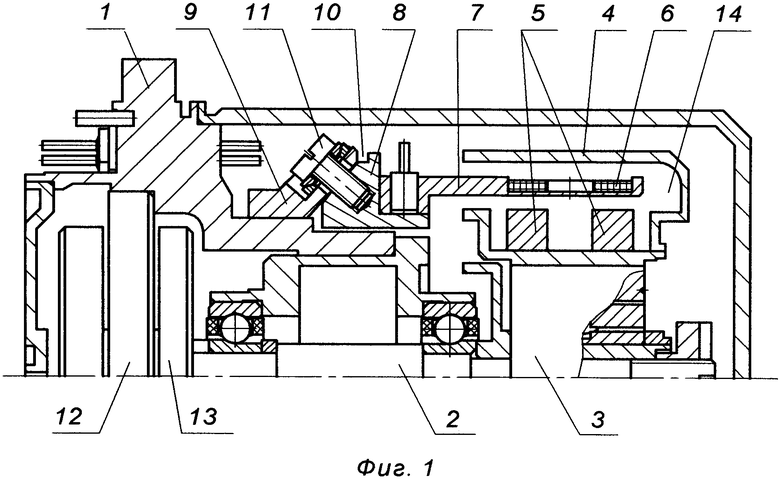
Динамически настраиваемый гироскоп, содержащий корпус, вал, упругий подвес, установленный на вал и обеспечивающий ротору возможность поворота относительно вала вокруг двух ортогональных осей, ротор, установленный на упругий подвес и имеющий кольцевой магнит, намагниченный в радиальном направлении и имеющий чередующиеся участки большей и меньшей намагниченности, статор двухкоординатного датчика угла, установленный на корпусе и имеющий катушки, вставленные в кольцеобразный канал ротора, отличающийся тем, что между статором двухкоординатного датчика угла и корпусом установлены две втулки, одна из которых присоединена к статору и имеет сферическую поверхность с центром в точке пересечения оси вала с осями подвеса, а вторая, установленная на корпусе, имеет коническую поверхность, сопрягающуюся со сферической поверхностью первой втулки, с возможностью углового смещения первой втулки относительно второй.
| US 4487083 A1, 11.12.1984 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| US 3222937 A1, 14.12.1965 | |||
| ГИРОСКОПИЧЕСКИЙ ПРИБОР И СПОСОБ РЕГУЛИРОВКИ ЕГО ДРЕЙФА | 1996 |
|
RU2114394C1 |

