Изобретение относится к разделу вычислительной техники, в частности к способам и техническим средствам, выполняющим синхронизованные обмены сообщениями между приемо-передатчиками подвижных объектов (далее объектов) и удаленным от них центром ретрансляции цифровых сообщений (далее центром, CRC) в среде с изменяющимися условиями передачи ненаправленных радио и оптических сигналов. Для функционирования подвижных объектов необходимо связанное с перемещением объектов быстрое многократное измерение интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений, так как скорость измерения определяет скорость реакции объектов на события, возникающие в процессе работы объектов, и на возможности выполняемых объектом вычислений.
Известен использованный в качестве прототипа способ измерения времени переноса сигналов между объектами и центром, опубликованный в патенте RU №2454707 С1, дата публикации 27.06.2012, Бюл. №18.
В этом способе стационарные объекты для связи с CRC используют оптические связи и посылку оптических сигналов точно направленных на CRC. Получив эти сигналы, CRC на другой частоте, используя ретрорефлектор, возвращает их только объекту, отправившему сигнал в CRC.
Перед началом взаимодействия с CRC объекты проводят два способа измерения временной удаленности объектов от CRC. В первом из них определяется Tmax - максимальная удаленность объектов от CRC. Выделение объектов со значением времени Tmax осуществляется последовательным опросом объектов для поиска max среди всех Ti. Результат Tmax сообщается всем объектам, во втором для каждого объекта Oi одновременно измеряется его удаленность Ti от CRC.
Прототип следующим способом использует измеренные интервалы времен Tmax и Ti.
Центр CRC кроме возможности определения Tmax и Ti позволяет объектам обмениваться сообщениями, содержащими данные и команды, управляющие работой объектов. Объекты получают синхросигнал от CRC и с задержкой *Ti=2(Tmax-Ti) передают свои сообщения в CRC, что обеспечивает одновременное поступление одноименных двоичных разрядов сообщений в CRC. Такое совмещение разрядов сообщений используется для синхронизации сообщений и проведения быстрых распределенных вычислений. Если объектам известны длительности передаваемых сообщений, то объекты, используя *Ti, передают сообщения одно за другим без временных пауз между сообщениями. Все это ускоряет взаимодействие объектов.
Таким образом, быстрое определение Tmax и Ti - основа быстрого выполнения процессов синхронизации и распределенных вычислений в системах, использующих CRC.
Быстрое определение Tmax и Ti - цель данного патента. Но подвижность объектов, функционирование в среде с изменяющимися условиями передачи сигналов, а также использование ненаправленных сигналов потребовали существенно изменить по сравнению с прототипом способ определения Tmax и Ti, так как для указанных подвижных объектов способ измерения Ti и Tmax в прототипе замедляет действия объектов.
Недостаток способа прототипа. Подвижные системы из-за изменения положения объектов, влияющего также на возможности передачи сигналов, требуют частого определения Tmax и Ti. Примененное в прототипе поочередное измерение Tmax - процедура длительная, требующая последовательного опроса объектов, и ее многократное применение существенно замедляет работу подвижной системы. Определение Ti в прототипе выполняется быстро за счет использования направленных оптических сигналов и ретрорефлекторов. Но такое решение не применимо в условиях работы подвижных систем, рассматриваемых в данном патенте. Таким образом, общий недостаток прототипа состоит в отсутствии для подвижных систем способа быстрого измерения интервалов времени Tmax и Ti переноса сигналов между объектами и CRC.
Известна взятая в качестве прототипа система, измеряющая Tmax - максимальную удаленность объектов Oi от CRC и измеряющая для каждого объекта Oi его удаленность Ti от CRC. (патент RU №2454707 С1, дата публикации 27.06.2012, Бюл. №18). Система содержит центр ретрансляции сообщений CRC и объекты Oi, которые передают по оптическим беспроводным линиям связи сигналы, направленные в центр CRC.
Недостаток системы в прототипе состоит в том, что она не обеспечивает указанное выше быстрое определение Tmax и Ti, требуемое для подвижных систем.
Задача настоящего изобретения для способа состоит в устранении недостатка прототипа, ведущего к большой затрате времени определения Tmax и оперированию только направленными оптическими сигналами для коррекции Ti в процессе работы системы.
Техническим результатом способа является уменьшение времени определения Tmax и расширение набора применяемых при коррекции Ti сигналов, включающего ненаправленные оптические и радиосигналы.
Технический результат способа достигается тем, что в способе быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC, в том числе Ti - интервала для любого объекта Oi и Tmax - интервала для наиболее удаленных от CRC объектов для этих измерений выполняют процесс Р измерения интервала времени между завершением посылки объектом в CRC сигнала ƒ1 и завершением приема объектом возвращенного от CRC ответного сигнала *ƒ1 и сохранения в объектах значение отсчета времени в момент завершения приема сигнала *ƒ1, причем для измерения Ti каждым объектом Oi в процессе передачи сообщения объект Oi в сообщении посылает в CRC сигнал ƒ1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий значение 2Ti, или для измерения Ti по команде объекта *O последний через CRC посылает объектам Oi команду измерения K1 и каждый объект Oi при завершении приема K1 поочередно в соответствии с порядковым номером объекта Oi посылает в CRC сообщение, состоящее из сигнала ƒ1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий в объекте значение 2Ti, причем для измерения Tmax в объектах произвольный объект *O через CRC посылает всем объектам команду K, а каждый объект при завершении приема K посылает в CRC сигнал ƒ1 и выполняет процесс Р, а объект *O завершает измерение посылкой в CRC сигнала ƒ0, в ответ на который CRC посылает объектам сигнал *ƒ0, и для объекта сохраненное процессом Р значение интервала времени равно 2Tmax.
Задача настоящего изобретения для системы - устранить указанный недостаток системы устройств прототипа путем ввода в систему новых устройств и связей между ними.
Технический результат для системы устройств состоит в том, что она соединяет объекты и CRC беспроводными связями, передающими ненаправленные радио или оптические сигналы, причем объекты и CRC содержат технические устройства для ускорения измерения интервалов времени Tmax и Ti переноса сигналов между объектами и центром CRC.
Технический результат для системы достигается тем, что в системе быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC, в том числе Ti - интервала для любого объекта Oi и Tmax - интервала для наиболее удаленных от CRC объектов для измерения Ti и для измерения Tmax в объектах она содержит в CRC приемники получаемых от объектов сигналов ƒ0, ƒ1 и передатчики посылаемых объектам сигналов *ƒ0, *ƒ1, соединенные линиями связи в пары для сигналов ƒ0-*ƒ0 и ƒ1-*ƒ1, при этом объекты содержат передатчики посылаемых объектами сигналов ƒ0, ƒ1, приемники получаемых объектами от CRC сигналов *ƒ0, *ƒ1, таймер, блок управления, причем в объекте выход каждого приемника и вход каждого передатчика соединены линиями связи с блоком управления объекта, который также соединен с таймером линиями связи включения таймера и считывания его показания.
Техническая сущность и принцип действия предложенной системы устройств поясняются чертежами.
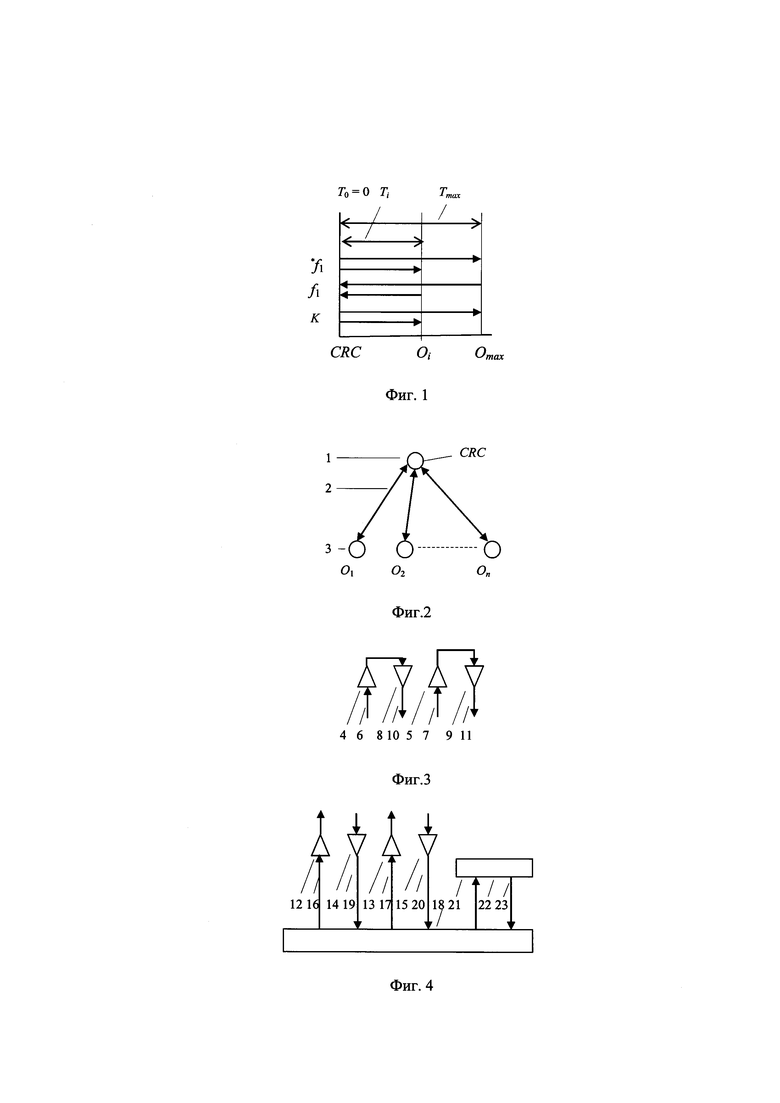
Фиг. 1. Способ быстрого измерения Tmax.
Фиг. 2. Система взаимодействия объектов с CRC.
Фиг. 3. Приемо-передатчики CRC.
Фиг. 4. Приемо-передатчики, блок управления и таймер объекта.
Приведенные на чертежах устройства следует рассматривать как примеры реализации предлагаемых в патенте устройств.
Краткое описание предложенного способа. В способе одновременно для всех объектов между каждым объектом и CRC выполняются обмен сигналами и посылка команды от одного из объектов через CRC другим объектам, позволяющие в совокупности ускорить измерение Tmax и Ti.
Краткое описание предложенной системы устройств.
Для выполнения способа быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC система содержит в CRC приемники сигналов объектов, поступающих по беспроводным ненаправленным связям, содержит также передатчики сигналов, посылаемых от CRC к объектам. При этом выход каждого из этих приемников соединен в CRC проводной связью с входом соответствующего приемнику передатчика. В каждом объекте находятся источники посылаемых в CRC сигналов и приемники получаемых от CRC сигналов. Выходы приемников и входы источников этих сигналов соединены линиями связи в объекте с блоком управления, который, используя сигналы приемников и внутреннюю информацию объекта, формирует и посылает сигналы источникам, управляющие передачей сигналов источниками.
Подробное описание предложенного способа определения Ti и Tmax.
При определении Ti и Tmax используется процесс Р, который измеряет интервал времени между завершением посыпки объектом в CRC сигнала ƒ1 и завершением приема объектом возвращенного от CRC ответного сигнала *ƒ1. Результат измерения процесс Р сохраняет в объекте, как значение отсчета времени в момент завершения приема сигнала *ƒ1.
Предложенный способ при измерении Ti в процессе работы системы (текущего значения Ti) действует следующим образом. Начальное измерение Ti выполняется для объектов Oi как в прототипе. Для коррекции Ti при перемещении объектов выполняются два варианта действий: независимо каждым объектом и под управлением выделенного для этой операции объекта.
Первый вариант. Объект корректирует Ti, используя для этого сигналы разрядов ƒ1 своих сообщений. Для этого объект выполняет следующие действия.
1. В своем сообщении объект выделяет двоичный разряд коррекции интервала Ti и помещает в него сигнал ƒ1, при этом должно быть свободное от сигналов место в начале и в конце разряда. Это достигается применением более короткого, чем обычно сигнала ƒ1 или увеличением размера разряда коррекции.
2. Модуль CRC переведет этот сигнал ƒ1 в сигнал *ƒ1 и возвратит объекту.
3. Если объект сместился, то возвращенный от CRC сигнал *ƒ1 сместится в пределах разряда. Объект измеряет интервал времени между посылкой сигнала ƒ1 и приемом сигнала *ƒ1 и сохраняет измеренное значение как 2Ti (выполняет процесс Р), что позволяет скорректировать Ti.
Второй вариант. Инициатором определения Ti является выделенный объект *O, выполняющий следующие действия.
Объект *O он через CRC посылает объектам Oi команду измерения K1 и каждый объект Oi при завершении приема K1 поочередно в соответствии с порядковым номером объекта Oi посылает в CRC сообщение, состоящее из сигнала ƒ1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий в объекте значение 2Ti.
Двоичную последовательность этих, состоящих из единственного сигнала ƒ1, сообщений далее для краткости назовем шкалой. Шкалу объекты синхронно посылают в CRC. Достижение синхронности не является предметом изобретения и аналогично способу, примененному в прототипе. Сообщению каждого объекта в шкале выделено соответствующее место - разряд шкалы. Объект помещает в свой разряд шкалы сигнал ƒ1 с сохранением свободных от сигналов мест в начале, и в конце разряда.
Модуль CRC переводит в шкале сигналы ƒ1 в сигналы *ƒ1 и возвращает шкалу объектам. Если объект сместился, то возвращенный от CRC сигнал *ƒ1 сместится в пределах разряда шкалы. Объект измеряет и сохраняет значение интервала времени между посылкой сигнала ƒ1 и приемом *ƒ1, (выполняет процесс Р), что позволяет скорректировать Ti.
Таким образом, посылкой одной шкалы корректируются Ti для всех объектов. Ускорение коррекции достигается за счет того, что вместо организации посылки многих сообщений, требуется организовать посылку единственного короткого сообщения.
Посылка команды K1 дает дополнительную возможность. После того, как для объекта Oi выполнено начальное определение Ti, шкала позволяет регулярно корректировать Ti, не ожидая завершения начального определения Ti для всех Oi. Кроме этого наличие в шкале сигналов ƒ1 позволяет обнаружить все работающие объекты Oi.
Предложенный способ при измерении Tmax действует следующим образом.
Один их объектов *O, имеющий право инициировать измерение Tmax, посылает в CRC сигналами ƒ0 и ƒ1 сообщение-команду K - начать определение Tmax. Эту команду CRC одновременно посылает всем объектам О сигналами *ƒ0 и *ƒ1 соответственно. Код команды K покидает модуль CRC в момент времени T0=0. В момент Ti код команды K покидает объект Oi, который начинает отсчет времени и одновременно отправляет в CRC сигнал ƒ1. Так действуют все объекты, включая наиболее удаленные объекты Omax, для которых положим Ti=Tmax.
Сигналы ƒ1 от объектов поступают в CRC, который преобразует их в сигналы *ƒ1 и отправляет эти сигналы объектам. Фиг. 1 показывает, что для сигнала *ƒ1, посланного от CRC в ответ на поступление сигнала ƒ1 от наиболее удаленных от CRC объектов, его приход к объекту Oi завершается через время 2Tmax после завершения отправки сигнала ƒ1 этими объектами. Для сигналов остальных объектов *ƒ1 приходят к объекту Oi раньше момента 2Tmax. При завершении прихода каждого сигнала *ƒ1 объект Oi сохраняет время его прихода, заменяя им предыдущее значение прихода *ƒ1. Объект *О завершает операцию посылкой в CRC сигнала ƒ0, который CRC переводит в *ƒ0 и отправляет объектам. Последнее сохраненное перед приходом сигнала *ƒ0, значение интервала времени равно 2Tmax. В результате каждый объект определит значение Tmax. В отличие от прототипа время определения Tmax для группы объектов равно времени измерения Tmax для одного объекта, что дает ускорение в определении Tmax.
Отметим, что измерение и сохранение интервала времени между посылкой объектом ƒ1 и приемом сигнала *ƒ1 и есть процесс Р.
Следует добавить объяснение. Количество сигналов *ƒ1 может быть меньше количества участвующих в определении объектов и даже равно единице. Это возможно, так как сигналы разных объектов могут совмещаться во времени, что не мешает определению Tmax. Для этого достаточно фиксировать момент завершения сигнала *ƒ1 и (или) вычитать из этого времени известную длительность сигнала *ƒ1.
Предложенные способы определения Ti и Tmax дают существенное ускорение в определении этих интервалов времени.
Подробное описание предложенной системы устройств.
Структура взаимодействия устройств предложенной системы приведена на фиг. 2. Здесь CRC (1) соединен беспроводными связями (2) с группой объектов (3). Беспроводные связи выполняются передачей ненаправленных радио или оптических сигналов в пространстве. Взаимодействие объектов выполняется в соответствии со способом, предложенным в патенте. Для этого CRC и объекты содержат следующие технические средства.
Техническое устройство компонент модуля CRC, участвующих в измерении Ti и Tmax, но непосредственно не измеряющих их, показано на фиг. 3. Здесь треугольниками 4, 5 показаны приемники, на входы которых 6, 7 от передатчиков объектов поступают соответственно сигналы ƒ0, ƒ1, направляемые объектами в CRC. Треугольниками 8, 9 показаны передатчики, с выходов которых 10, 11 посылаются объектам соответственно сигналы *ƒ0, *ƒ1. Выходы приемников и входы передатчиков соединены линиями связи в пары так, что входной сигнал приемника формирует выходной сигнал передатчика в следующем соответствии: ƒ0-*ƒ0, ƒ1-*ƒ1.
Техническое устройство средств объекта, выполняющих измерение Ti и Tmax, показано на фиг. 4. Здесь треугольниками 12, 13 показаны соответственно передатчики сигналов ƒ0, ƒ1, направляемых объектом в CRC, треугольниками 14, 15 показаны соответственно приемники сигналов *ƒ0, *ƒ1, поступающих в объект от CRC. На входы 16, 17 передатчиков поступают от 18 - блока управления объекта сигналы, формирующие на выходах передатчиков направляемые в CRC сигналы ƒ0, ƒ1. Поступающие от CRC радио или оптические сигналы *ƒ0, *ƒ1 приемники преобразуют в электрические сигналы и по линиям 19, 20 направляют в блок 18.
Устройство блока управления 18 здесь не рассматривается, так как в его организации нет специфики, характерной для измерения Ti и Tmax. Блок 18 действует одинаково для всех требуемых объекту действий - он принимает от приемников сигналы CRC, расшифровывает передаваемую ими инструкцию и посылает управляющие сигналы в компоненты объекта. В частности блок 18 вырабатывает и принимает все приведенные на фиг. 4 сигналы.
Кроме указанных средств объект имеет таймер 21, который блок управления, используя линию 22, включает для выполнения отсчетов времени, требуемых способом, и с которого блок управления, используя линию 23, считывает выполненный отсчет времени.
Изобретение относится к разделу вычислительной техники. Техническим результатом способа является уменьшение времени определения максимальной удаленности объектов Tmax. Способ быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC: выполняют процесс Р измерения интервала времени между завершением посылки объектом в CRC сигнала ƒ1 и завершением приема объектом возвращенного от CRC ответного сигнала *ƒ1 и сохранения в объектах значение отсчета времени в момент завершения приема сигнала *ƒ1, каждый объект Oi при завершении приема K1 поочередно в соответствии с порядковым номером объекта Oi посылает в CRC сообщение, состоящее из сигнала ƒ1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий в объекте значение 2Ti, а каждый объект при завершении приема K посылает в CRC сигнал ƒ1 и выполняет процесс Р, а объект *O завершает измерение посылкой в CRC сигнала ƒ0, в ответ на который CRC посылает объектам сигнал *ƒ0, и для объекта сохраненное процессом Р значение интервала времени равно 2Tmax. 2 н.п. ф-лы, 4 ил.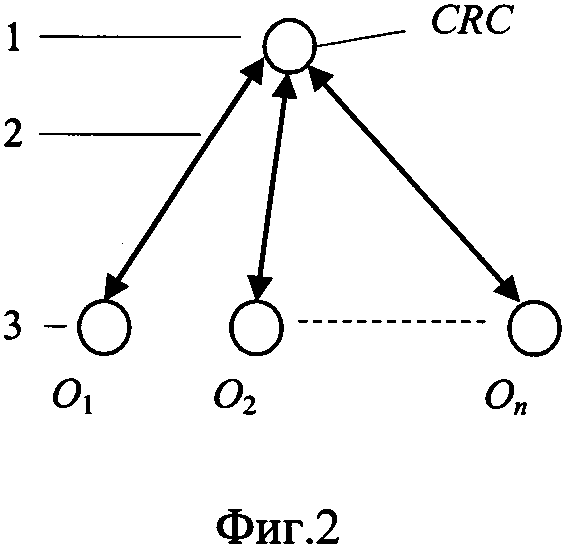
1. Способ быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC, в том числе Ti - интервала для любого объекта Оi и Тmах - интервала для наиболее удаленных от CRC объектов, характеризующийся тем, что для этих измерений выполняется процесс Р измерения интервала времени между завершением посылки объектом в CRC сигнала f1 и завершением приема объектом возвращенного от CRC ответного сигнала *f1 и сохранения в объекте значения отсчета времени в момент завершения приема сигнала *f1, причем для измерения Ti каждым объектом Оi в процессе передачи сообщения объект Oi в сообщении посылает в CRC сигнал f1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий значение 2Ti, или для измерения Ti выделяется объект *O посылающий через CRC объектам Оi команду K1, а каждый объект Oi при завершении приема K1 поочередно в соответствии с порядковым номером объекта Оi посылает в CRC сообщение, состоящее из сигнала f1, до и после которого в заданных временных интервалах отсутствуют сигналы, и выполняет процесс Р, сохраняющий в объекте значение 2Ti, причем для измерения в объектах Тmах также используется объект *O, который через CRC посылает всем объектам Оi команду K, а каждый объект при завершении приема K посылает в CRC сигнал f1 и выполняет процесс Р, а объект *O завершает измерение посылкой в CRC отличающегося от f1 сигнала f0, в ответ на который CRC посылает объектам отличающийся от f1 и f0 сигнал *f0, который во всех объектах сохраняет определенное процессом Р значение интервала в качестве 2Тmах.
2. Система быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений CRC, в том числе Ti - интервала для любого объекта Оi и Тmах - интервала для наиболее удаленных от CRC объектов, предназначена для уменьшения времени определения Тmах и расширения набора применяемых при коррекции Ti сигналов, включающего ненаправленные оптические и радиосигналы, характеризуется тем, что для измерения Ti и для измерения Тmах в объектах она содержит в CRC приемники получаемых от объектов сигналов f0, f1 и передатчики посылаемых объектам сигналов *f0, *f1, соединенные линиями связи в пары для сигналов f0-*f0 и f1-*f1, при этом объекты содержат передатчики посылаемых объектами сигналов f0, f1, приемники получаемых объектами от CRC сигналов *f0, *f1, таймер, блок управления, причем в объекте выход каждого приемника и вход каждого передатчика соединены линиями связи с блоком управления объекта, который также соединен с таймером линиями связи включения таймера и считывания его показания.
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ИСТОЧНИКОВ ОПТИЧЕСКИХ СИГНАЛОВ | 2011 |
|
RU2454707C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ НА ПОДВИЖНЫЕ ОБЪЕКТЫ | 2001 |
|
RU2193817C1 |
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ | 2007 |
|
RU2377723C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
| US 9317343 B1, 19.04.2016. | |||

