Изобретение относится к разделу вычислительной техники, в частности к способам и техническим средствам, выполняющим взаимодействие между автономными мобильными техническими объектами.
Изобретение может быть использовано для ускорения реакции автономных мобильных технических объектов на изменение состояния объектов и внешней среды.
Известны использованные в качестве прототипа способ и система, опубликованные в статье: Стецюра Г.Г. Компьютерная сеть с быстрой распределенной перестройкой своей структуры и обработкой данных в процессе их передачи (Журнал Проблемы управления, №1, 2017.). http://pu.mtas.ru/archive/Stetsyura_117.pdf В ней предложено расширить возможности суперкомпьютеров и суперкомпьютерных кластеров за счет синхронизации действий большого количества вычислительных средств, объединенных беспроводными оптическими связями. Предложенная синхронизация позволила выполнять распределенные вычисления непосредственно сетевыми средствами, что позволило повысить производительность системы.
Система состоит из группы объектов Oi и группы модулей связи MS, стационарно расположенных в помещении, например, в вычислительном центре. Связи беспроводные, с передачей по ним оптических сигналов. Объекты посылают в избранный ими MS двоичные сигналы единица и ноль на частотах ƒ1 и ƒ0. Модуль MS получает их и ретранслирует следящим за данным модулем MS объектом. При обеспечении жесткой синхронизации поступления сигналов в MS он действует как точечный источник синхронизированных сигналов, который их отправляет объектам, следящим за MS. При использовании возможностей прототипа в мобильных системах они ускорили бы реакцию на изменение состояния системы объектов и внешней среды.
Но недостатком прототипа является требование стационарности объектов системы, что не позволяет применить эти результаты в системах подвижных объектов. Поэтому системе мобильных объектов потребуются следующие дополнительные возможности:
- выделение объекта - лидера, формирующего сетевое взаимодействие объектов, и выделение лидером модуля связи (MS);
- быстрое определение удаленности объектов от MS и ее корректировка при перемещении объектов;
- быстрое определение изменяемого во времени качества передачи сигналов и его корректировка;
- выявление отсутствия сигналов объектов из-за изменения состояния среды и идентификация «молчащих» объектов;
- обнаружение вышедших из системы объектов и ввод в систему новых объектов.
Задача настоящего изобретения для способа состоит в ускорении реакции автономных мобильных технических объектов на изменение состояния объектов и внешней среды за счет расширении возможностей прототипа обеспечением отсутствующих в прототипе перечисленных выше возможностей.
Технический результат способа состоит в том, что за счет предлагаемой взаимосвязанной последовательности действий способ в отличие от прототипа может действовать в системе подвижных объектов автономных мобильных технических объектов и ускоряет реакцию системы на изменение состояния объектов и внешней среды. Технический результат для способа достигается тем, что среди перенумерованных объектов выделяют с использованием приоритетного децентрализованного управления единственный объект-лидер, который назначает единственный объект модулем связи (MS); одновременно определяют удаленность объектов от MS, причем каждый объект, обмениваясь сигналами с MS, определяет свою удаленность от MS и наибольшую удаленность объектов от MS; синхронизуют взаимодействия объектов, причем объекты, используя их удаленность, упорядочивают передачи сообщений в MS так, чтобы разряды всех сообщений поступали в MS в заданном порядке; выполняют распределенные цифровые операции, причем объекты, используя синхронизацию, поразрядно совмещают сигналы в MS и выполняют в MS логические операции И, ИЛИ, определяют max и min среди передаваемых в MS чисел; выполняют распределенное аналого-цифровое суммирование, в котором энергия передаваемых объектами в MS сигналов суммируется в MS, преобразуется с помощью аналого-цифрового преобразования в цифровую форму и одновременно отсылается от MS объектам; быстро определяют качество передачи сигналов, его корректируют и определяют неработоспособные объекты, суммируя количество принятых MS сигналов объектов и определяя их уровень; из объектов - претендентов на вход в систему с использованием дополнительных сигналов выделяют приоритетным децентрализованным управлением единственный объект, который входит в систему.
Задача настоящего изобретения для системы состоит в формировании системы технических устройств и связей между ними, ускоряющей реакцию автономных мобильных технических объектов на изменение состояния объектов и внешней среды.
Технический результат для системы состоит в том, что в отличие от прототипа совокупность технических средств системы позволяет применять в системе автономные мобильные технические объекты и ускоряет реакцию системы на изменение состояния объектов и внешней среды.
Технический результат для системы достигается тем, что система содержит подвижные объекты и модуль связи MS, объединенные беспроводными ненаправленными радио или оптическими каналами связи, причем MS содержит три источника посылаемых объектам сигналов соответственно частот *ƒ1, *ƒ2, *ƒ3, и три приемника получаемых от объектов сигналов соответственно частот ƒ1, ƒ2, ƒ3, содержит блок аналого-цифровых преобразователей и блок управления, подключенный к нему и к источникам и приемникам, причем каждый объект для связи с MS содержит модуль взаимодействия с MS, отличающийся от MS тем, что в нем источники посылают сигналы частот ƒ1, ƒ2, ƒ3, приемники получают сигналы частот *ƒ1, *ƒ2, *ƒ3, а блок управления дополнительно соединен с компьютерными средствами объекта.
Техническая сущность и принцип действия предложенного устройства поясняются чертежами.
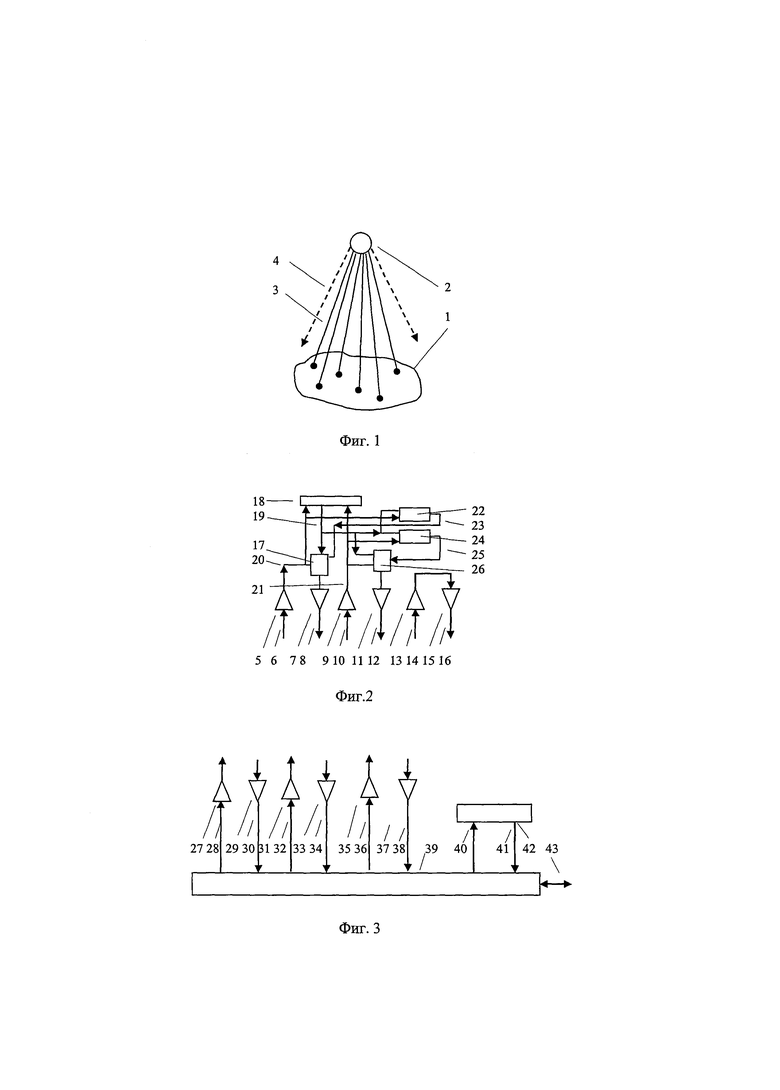
Фиг. 1. Структура системы мобильных объектов.
Фиг. 2. Вариант организации модуля связи.
Фиг. 3. Универсальная структура модулей связи и взаимодействия объекта с модулем связи.
Приведенные на чертежах устройства следует рассматривать как примеры технической реализации предлагаемого в патенте устройства.
Краткое описание предлагаемого способа. Для ускорения реакции системы автономных мобильных технических объектов на изменение состояния объектов и внешней среды способ использует следующую последовательность операций.
Выделяется формирующий сетевое взаимодействие объектов объект - лидер и лидером выделяется модуль связи. Проводится начальное поочередное измерение интервала времени Ti - - распространения сигнала между объектом и MS, и одновременное для всех объектов измерение Tmax - наибольшей временной удаленности объектов от MS. Проводится быстрая синхронизация взаимодействия объектов.
Проводится одновременная коррекция интервалов времени Ti - распространения сигнала между объектом и MS. Выполняются распределенные цифровые операции и распределенное .0аналого-цифровое суммирование. Быстро определяется объектами качество посылаемых в MS сигналов и корректируется их уровень. Вводятся в систему новые объекты.
Краткое описание предлагаемой системы. Для ускорения реакции системы автономных мобильных технических объектов на изменение состояния объектов и внешней среды система содержит подвижные объекты и модуль связи MS, объединенные беспроводными ненаправленными радио или оптическими каналами связи. Модуль MS содержит источники посылаемых объектам сигналов и приемники получаемых от объектов сигналов, содержит блок аналого-цифровых преобразователей и блок управления, подключенный к нему, к источникам и приемникам. Каждый объект для связи с MS содержит незначительно отличающийся от MS модуль взаимодействия с MS, а блок управления дополнительно соединен с компьютерными средствами объекта.
Подробное описание предлагаемого способа. Предлагаемый способ состоит из ряда модифицированных операций прототипа и совокупности отсутствующих в прототипе дополнительных операций, часть которых требуется применять в определенной последовательности. Для получения хороших временных характеристик объекты удалены от MS не более чем на километр.
При описании использованы обозначения из описания предлагаемой системы, к которой применяются операции.
Способ состоит из следующей совокупности взаимно связанных операций.
Операция 1 выделения объекта - лидера, формирующего сетевое взаимодействие объектов, и выделения лидером модуля связи (MS).
Операция 2 начального поочередного измерения интервала времени Ti- - распространения сигнала между объектом и MS, и одновременного для всех объектов измерения Tmax - наибольшей временной удаленности объектов от MS.
Операция 3 быстрой синхронизации взаимодействия объектов.
Операция 4 одновременной коррекции интервалов времени Ti - распространения сигнала между объектом и MS.
Операция 5 выполнения распределенных цифровых вычислений.
Операция 6 распределенного аналого-цифрового суммирования
Операция 7 быстрого определения объектами качества посылаемых в MS сигналов.
Операция 8 коррекции объектами уровня посылаемых в MS сигналов.
Операция 9 ввода в систему новых объектов.
Описание операций.
Операция 1 выделения объекта - лидера, формирующего сетевое взаимодействие объектов, и выделения лидером модуля связи (MS).
При получении внешней команды, при изменении состояния объекта или внешней среды один или несколько объектов переходят в состояние начала организации системы. Из группы объектов выделяется единственный объект, лидер. Для этого объектам присвоены двоичные номера, и каждый объект передает старший бит номера. Объекты, передавшие ноль, прекращают борьбу за лидерство. Оставшиеся объекты ожидают в течение времени, достаточного для получения любым объектом сигналов других объектов, передают значение следующего разряда и т.д.
В результате будет выделен лидер, который затем выбирает MS. Функции MS может выполнять любой объект или, как следует из дальнейшего изложения, простое устройство, в частности, не содержащее логических элементов.
Операция 2 начального поочередного измерения интервала времени Ti - распространения сигнала между объектом и MS, и одновременного для всех объектов измерения Tmax - наибольшей временной удаленности объектов от MS.
Лидер поочередно обращается к объектам Oi, сообщает им имя (номер) MS и требует измерить Ti - интервал времени распространения сигнала между объектом и MS. Выбранный объект проводит это измерение, пользуясь одним из известных способов - непосредственного измерения времени распространения сигнала между объектом и MS, или использования показания часов лидера и объекта, или измерения их координат.
Кроме Ti одновременно для всех объектов определяется Tmax - интервал времени распространения сигнала от наиболее удаленных объектов до MS. Лидер через MS посылает объектам команду начать определение Tmax. С задержкой Ti код команды полностью поступает к объекту Oi и который запускает свой таймер и одновременно отправляет в MS сигнал ƒ0. Так действуют все объекты, включая наиболее удаленные объекты Omax. В объект Omax код команды полностью поступает в момент Tmax.
Сигналы ƒ0 от объектов поступают в модуль MS, преобразующий их в *ƒ0. Сигнал *ƒ0, сформированный в ответ на поступление сигнала ƒ0 от наиболее удаленного от MS объекта, приходит к любому объекту Oi через время 2Tmax после запуска таймера этим объектом. Сигналы *ƒ0, сформированные в ответ на сигналы ƒ0 остальных объектов, приходят к объекту Oi раньше момента 2Tmax. При поступлении каждого сигнала *ƒ0 объект Oi запоминает показание таймера, заменяя предыдущее сохраненное показание. Лидер посылает команду завершения измерения Tmax. В результате каждый объект определит значение Tmax. Время определения Tmax всеми объектами не зависит от количества объектов. В процессе работы сети значение Tmax корректируется таким же способом.
Операция 3 быстрой синхронизации взаимодействия объектов.
Объектам известны времена Ti и *Tmax. Процесс синхронизации начинается с получения объектом синхросигнала от MS. Этим сигналом может быть команда одного из. объектов начать синхронизацию или искаженный двоичный сигнал, например, возникший при одновременном получении объектом сигналов *ƒ1 и *ƒ0. Такое искажение возникнет при наличии конфликта доступа к MS группы объектов, передающих сообщения не синхронно.
Используя синхросигнал, объекты участвуют в передаче шкалы синхронизации, содержащей количество двоичных разрядов равное количеству конфликтующих объектов. Для этого, получив синхросигнал, объект с задержкой 2(*Tmax-Ti) посылает сигнал ƒ1 в отведенный ему разряд шкалы. Шкала поступает в MS как единое сообщение и возвращается к объектам. Объекты, учитывая расположение единиц в шкале, посылают свои сообщения одно за другим или одновременно. Синхронизация выполнена, одновременно этим выполняется быстрое устранение конфликта доступа к MS.
Синхронизация имеет вариант - быструю барьерную синхронизацию, фиксирующую момент завершения асинхронных процессов в группе объектов. Используются дополнительно сигналы ƒ3 и *ƒ3. Объект, начавший асинхронный процесс, посылает в MS сигнал ƒ3, в ответ все объекты получат от MS сигнал *ƒ3. Объект, завершивший асинхронный процесс, выключает сигнал ƒ3. В момент завершения процесса всеми объектами MS прекратит передачу *ƒ3, что служит сигналом барьерной синхронизации.
Операция 4 одновременной коррекции интервалов времени Ti - распространения сигнала между объектом и MS.
Перемещение объектов требует частой и быстрой коррекции этих интервалов времени. Для ускорения, в отличие от операции 2, измерение Ti проводится всеми объектами одновременно. Для этого при передаче объектом сигнала окружим его зоной, свободной от сигналов. При возвращении от MS сигнала объект измеряет отклонение во времени полученного сигнала от ожидаемого положения сигнала при отсутствии перемещения объекта и корректируют Ti. Операции 4 и 2 позволяют при любых перемещениях объектов и MS быстро определять текущие значения Ti и Tmax.
Операция 5 выполнения распределенных цифровых вычислений.
В нем выполняются одновременно всеми объектами логические операции И, ИЛИ, нахождение max и min, цепочки синхронных и асинхронных вычислений.
Логические операции И, ИЛИ. Объекты, используя сигналы ƒ1 и ƒ0, посылают разряды цепочки двоичных разрядов с их одновременным приходом в MS,. Модуль MS возвращает в каждом разряде одно из трех сочетаний сигналов *ƒ1, *ƒ0, *ƒ1 и *ƒ0.
При выполнении операции И возврат только сигнала *ƒ1 означает «истинно», остальные варианты означают «ложно». При выполнении операции ИЛИ возврат только сигнала *ƒ0 означает «ложно», остальные варианты означают «истинно».
Два варианта нахождения max и min. Первый вариант использует двоичную систему представления чисел сигналами ƒ1 и ƒ0. Аналогично операции 1 объекты передают разряды чисел, начиная со старшего разряда. Если объект, определяя max, посылал сигнал ƒ0 и от MS получил *ƒ1 или *ƒ1*ƒ0, то он перестает участвовать в операции. Оставшиеся объекты поступают так же с остальными разрядами, в завершении процесса определяя max. С заменой роли сигналов находится min.
Во втором варианте нахождения max и min цифры представлены двоичными шкалами. Количество разрядов шкалы соответствует р -арности используемой системы счисления. Один разряд шкалы, соответствующий значению цифры, равен единице, остальные нули. Например, в десятичной системе цифра 7 представлена в двоичной шкале как 7=0 0 1 0 0 0 0 0 0. При этом в результате совмещения в MS разрядов шкал, представляющих старшую десятичную цифру чисел, получен код вида 010010100. Сразу обнаруживается max=8, min=3. Последовательно проверяются следующие цифры чисел и в результате выделяются объекты, содержащие наибольшее или наименьшее число.
Использование больших значений р ускоряет операцию, так как требует меньшего количества пересылок сигналов между объектами и MS. Время выполнения операций не зависит от количества участников операции.
Цепочки распределенных синхронных операций. Выполняются все логические операции, определение max и min и арифметические суммирование, вычитание, умножение. Предварительная команда определяет состав объектов - участников операции и их порядок в цепочке объектов, выполняющих операцию.
Первый объект - участник операции посылает в MS операнд, который принимает второй участник и выполняет требуемое вычисление, используя свой операнд. Результат передается в MS, от MS его принимает третий участник и т.д. В указанных операциях для получения промежуточных результатов не требуется задерживать сообщение в объекте цепочки. Операция выполняется синхронно в конвейерном режиме.
Выигрыш во времени достигается за счет того, что это единая операция, порядок и время выполнения действий объектов в ней заранее определено.
Цепочки распределенных асинхронных операций. Объекты цепочки выполняют произвольные операции, задерживая промежуточный результат на неопределенное время. Продвижение вычисления по цепочке выполняется по сигналу барьерной синхронизации. Объекту, завершающему очередной шаг вычисления, предоставляется дополнительно право одновременно информировать все объекты о своем результате.
Операция 6 выполнения распределенных аналого-цифровых операций (АЦО).
Аналого-цифровые операции существенно расширяют возможности цифровых операций: аналого-цифрового суммирования, счета, нахождения max и. min.
В модуль связи MS добавлен аналого-цифровой преобразователь (АЦП). Каждый объект имеет число и требуется быстро получить сумму этих чисел за время, не зависящее от количества объектов - участников операции. Каждая цифра суммируемых чисел представлена р-арной двоичной шкалой, подобной шкале, показанной в операции 3. Шкалы цифр суммируемых чисел поступают в MS с совмещением одноименных разрядов. Блок АЦП проводит суммирование только в ответ на поступление в MS специальной команды.
Фотоприемник в MS интегрирует энергию принятых сигналов ƒ1 каждого разряда шкалы, представляющей цифру, и передает итоговый сигнал в АЦП, который выдает цифровое значение. Полученные частичные суммы для разрядов цифр MS отсылает объектам, где выполняется их завершающее суммирование.
Время выполнения АЦО состоит из двойного интервала времени прохождения сигнала между MS и самым удаленным от него объектом и времени, требуемого для преобразования аналоговых сигналов в цифру.
При операции счета если группа сигналов ƒ1 одновременно поступает в MS, то его АЦП подсчитывает их количество и выдает результат счета объектам.
Операция 7 быстрого определения объектами качества посылаемых в MS сигналов.
Состояние среды, в которой действуют объекты, влияет на передаваемые сигналы. Чтобы определить количество и уровень поступающих в MS сигналов объектов и определить неработающие объекты, используется шкала синхронизации. Все объекты получают команду послать в соответствующий объекту разряд шкалы единичный сигнал ƒ1 Шкала возвращается объектам, и количество единиц в шкале соответствует количеству принятых в MS сигналов объектов.
Шкала синхронизации дополнена разрядом S - участком, в который объекты при синхронизации посылают с совмещением сигналы ƒ1. Энергию этих сигналов суммирует АЦП и MS отправляет всем объектам в разряде S цифровой результат суммирования *S. Если не все источники сигналов находятся в допустимой области отклонения от стандартного уровня, то *S обнаруживает приближение к критической области, несмотря на правильное количество единиц в шкале.
Операция 8 коррекции объектами уровня посылаемых в MS сигналов.
Чтобы выявить конкретные объекты с недопустимым отклонением сигнала, повторно посылается объектами шкала синхронизации, в которой АЦП модуля MS оцифровывает значение каждого сигнала шкалы. Это отметит критичные объекты с отклонением уровня сигнала от нормы с указанием конкретного значения сигналов.
Достаточно использовать совместно с АЦП только первую шкалу, но это целесообразно только при частых появлениях слабых сигналов, так как размер разрядов шкалы увеличивается для размещения результатов суммирования.
Возможна другая операция контроля и регулирования уровня сигналов. Если разместить АЦП во всех объектах, то любой сигнал объекта, возвращаемый MS, без дополнительной команды может быть проверен объектом и при необходимости запустится коррекция источника этого сигнала.
Операция 9 ввода в систему новых объектов.
Для включения новых объектов в систему выполняются следующие действия. В фоновом режиме на вспомогательных частотах, отличных от ƒ1, ƒ0, из группы претендентов - новых объектов выделяется победитель. Используются действия операции 1 по выделению лидера. Затем, также в фоновом режиме на частотах, отличных от ƒ1, ƒ0 и *ƒ1, *ƒ0, победитель определяет Ti и Tmax.
После этого объект, вошедший в систему, переходит на основные частоты ƒ1 и ƒ0 и выполняет вход в сеть, заняв первую по порядку из свободных ячейку шкалы (не содержащую *ƒ1 или *ƒ0).
Подробное описание предлагаемой системы.
Предложенная система устройств организована с учетом требований предложенного в патенте способа. Структура связей объектов системы показана на фиг. 1.
Система состоит из группы объектов Oi - 1 и модуля связи MS - 2. В общем случае любой объект может действовать как MS.
Связи беспроводные ненаправленные, с передачей по ним радио или оптических сигналов. Объекты имеют источники двоичных сигналов со значением единица и ноль, посылаемых в MS на частотах ƒ1 и ƒ0, a MS при их получении ретранслирует всем объектам широковещательно на частотах *ƒ1 и *ƒ0 соответственно. Жесткая синхронизация поступления сигналов в MS позволяет MS действовать как точечному источнику сигналов, одновременно синхронизированных для всех объектов-приемников. Кроме приемников сигналов на частотах ƒ1 и ƒ0, модуль MS имеет приемник сигналов на частоте ƒ3. Модуль MS имеет источники сигналов на частотах *ƒ1, *ƒ0 и *ƒ3. Для передачи сигналов в модуль связи объект имеет ненаправленный оптический или радиоканал связи - 3. Этот канал один и тот же для всех объектов, которые передают сигналы в канал одновременно, или с частичным или полным совмещением сигналов в MS, а также последовательно один за другим.
Для передачи сигналов от модуля связи к объектам модуль MS имеет ненаправленный оптический или радиоканал связи (4). Канал (4) соединяет MS со всеми объектами одновременно.
Вариант организации модуля связи.
На фиг. 2 показан один из вариантов построения модуля связи MS, содержащего АЦП. Модуль MS содержит приемники 5, 9, 13 сигналов ƒ1, ƒ2, ƒ3, поступающих от объектов по беспроводным каналам связи 6, 10, 13 соответственно; содержит передатчики 7, 11, 15 сигналов *ƒ1, *ƒ2, *ƒ3, передаваемым объектам по беспроводным каналам связи 8, 12, 16 соответственно. Модуль MS содержит переключатели сигналов К1 - 17 и К2 - 26, блок управления - 18 и два аналого-цифровых преобразователя АЦП1-22 и АЦП2-24.
Блоки модуля MS соединены между собой следующими связями. Выход 20 блока 5 подключен к входам блоков 17, 18, 22. Выход 21 блока 9 подключен к входам блоков 18, 24, 26. Выход блока 13 подключен к входу блока 15. Блок 18 имеет выход 19, подключенный к управляющим входам блоков 17, 22, 24, 26. Выход 23 блока 22 подключен к входу блока 17. Выход 25 блока 24 подключен к входу блока 26. Выход блока 17 подключен к входу в блок 7, выход блока 26 подключен к входу в блок 11. Все сигналы в модуле MS электрические, кроме сигналов на каналах 6, 8, 10, 12, 14, 16, связывающих MS с объектами.
Назначение блока управления 18: он принимает команду выполнения аналого-цифрового суммирования или счета (см. описание операции) и, действуя на блоки 17 и 26, направляет сигналы с выходов блоков 6 и 9 на блоки 7 и 11 или на вход АЦП1 (для суммирования сигналов единица в сообщениях), или на вход АЦП2 (для суммирования сигналов ноль в сообщениях).
Структура модуля взаимодействия объекта с модулем связи.
Здесь рассмотрена более укрупненная структура модуля связи, в частности, включающая структуру фиг. 2. Модуль представлен на фиг. 3. Он содержит передатчики 27, 31, 35 ненаправленных радио или оптических сигналов ƒ1, ƒ2, ƒ3, передаваемых объектам соответственно. Содержит приемники 29, 33, 37, соответственно получающие сигналы *ƒ1, *ƒ2, *ƒ3 передаваемые по беспроводным каналам связи от объектов. Содержит также блок управления 39, соединенный с передатчиками 27, 31, 35 и приемниками 29, 33, 37 линиями 28, 32, 36 и 30, 34, 38 соответственно. Содержит также блок 42 преобразователей АЦП, которые подключены группой линий 40 к блоку управления 39, получают от последнего сигналы управления и сигналы, поступающие от блоков 29, 33, а выходы блоков АЦП соединены с блоком 39 линией 41.
Кроме этого блок управления 42 для взаимодействия с компьютерными средствами объекта подключен к ним двусторонними шинами связи 43.
Универсальная структура модуля связи.
Здесь рассмотрена более укрупненная структура модуля связи MS, в частности, включающая структуру фиг. 2. Модуль связи MS с небольшими отличиями идентичен приведенному выше модулю взаимодействия объекта с модулем связи. Отличия заключаются в том, что приемники 29, 34, 38 сигналов должны принимать поступающие от объектов сигналы ƒ1, ƒ2, ƒ3, *ƒ1, *ƒ2, *ƒ3, вместо сигналов *ƒ1, *ƒ2, *ƒ3 а передатчики 27, 31, 35 должны передавать объектам сигналы *ƒ1, *ƒ2, *ƒ3 вместо ƒ1, ƒ2, ƒ3.
Изобретение относится к области вычислительной техники. Технический результат заключается в обеспечении синхронизации действий мобильных технических объектов при передаче сообщений и выполнении распределенных вычислений. Способ содержит этапы, на которых: выделяют с использованием приоритетного децентрализованного управления единственный объект-лидер, который назначает единственный объект модулем связи (MS); определяют удаленность объектов от MS; синхронизуют взаимодействия объектов, причем объекты, используя их удаленность, упорядочивают передачи сообщений в MS так, чтобы разряды всех сообщений поступали в MS в заданном порядке; выполняют распределенные цифровые операции, причем объекты, используя синхронизацию, поразрядно совмещают сигналы в MS и выполняют распределенное аналого-цифровое суммирование, в котором энергия передаваемых объектами в MS сигналов суммируется в MS, преобразуется с помощью аналого-цифрового преобразования в цифровую форму и одновременно отсылается от MS объектам. 2 н.п. ф-лы, 3 ил. 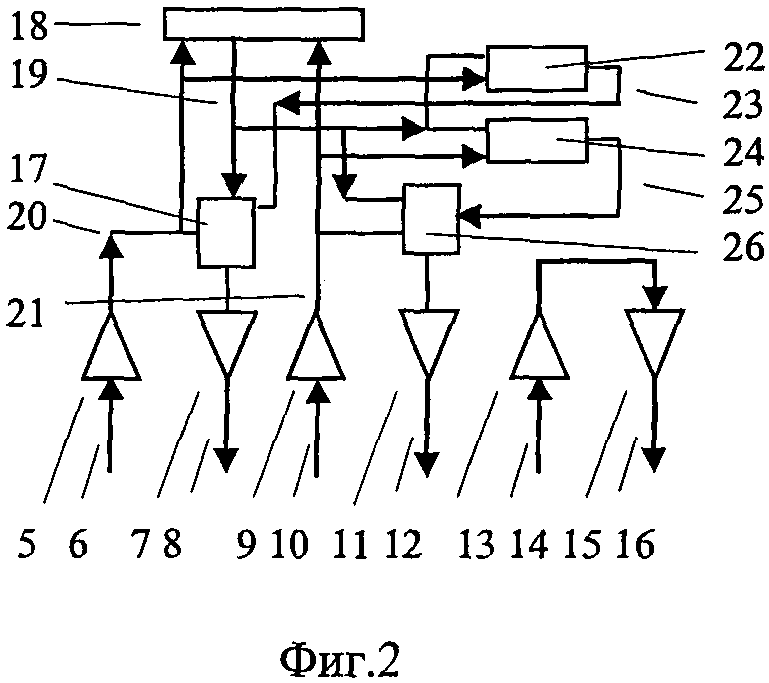
1. Способ управления взаимодействием автономных мобильных технических объектов (далее - объектов) характеризуется тем, что среди перенумерованных объектов выделяют с использованием приоритетного децентрализованного управления единственный объект-лидер, который назначает единственный объект модулем связи (MS); одновременно определяют удаленность объектов от MS, причем каждый объект, обмениваясь сигналами с MS, определяет свою удаленность от MS и наибольшую удаленность объектов от MS; синхронизуют взаимодействия объектов, причем объекты, используя их удаленность, упорядочивают передачи сообщений в MS так, чтобы разряды всех сообщений поступали в MS в заданном порядке; выполняют распределенные цифровые операции, причем объекты, используя синхронизацию, поразрядно совмещают сигналы в MS и выполняют распределенное аналого-цифровое суммирование, в котором энергия передаваемых объектами в MS сигналов суммируется в MS, преобразуется с помощью аналого-цифрового преобразования в цифровую форму и одновременно отсылается от MS объектам; определяют качество передачи сигналов, его корректируют и определяют неработоспособные объекты, суммируя количество принятых MS сигналов объектов и определяя их уровень; из объектов - претендентов на вход в систему с использованием дополнительных сигналов выделяют приоритетным децентрализованным управлением единственный объект, который входит в систему.
2. Система управления взаимодействием автономных мобильных технических объектов (далее - объектов) характеризуется тем, что система содержит объекты и модуль связи MS, объединенные беспроводными ненаправленными радио или оптическими каналами связи, причем MS содержит три источника посылаемых объектам сигналов соответственно частот *ƒ1, *ƒ2, *ƒ3, и три приемника получаемых от объектов сигналов соответственно частот ƒ1, ƒ2, ƒ3, содержит блок аналого-цифровых преобразователей и блок управления, подключенный к нему и к источникам и приемникам, причем каждый объект для связи с MS содержит модуль взаимодействия с MS, отличающийся от MS тем, что в нем источники посылают сигналы частот ƒ1, ƒ2, ƒ3, приемники получают сигналы частот *ƒ1, *ƒ2, *ƒ3, а блок управления дополнительно соединен с компьютерными средствами объекта.
| US 5649291 A, 15.07.1997 | |||
| RU 2012139392 A, 20.03.2014 | |||
| US 6163681 A, 19.12.2000 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

