Изобретение относится к области вычислительной техники, в частности к способам и техническим средствам децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, с целью ускорения выполняемых объектами распределенных вычислений.
Известны использованные в качестве прототипа для способа и системы RU 2 697 729 С1, 19.08.2019 «Способ и система управления взаимодействием автономных мобильных технических объектов с быстрой реакцией на изменение состояния объектов и внешней среды».
В прототипе для синхронизации действий мобильных объектов предложен способ измерения, организующий для каждого объекта измерение интервала времени переноса сигнала от него до выделенного мобильного объекта - модуля связи MS (далее вместо «интервал времени переноса сигнала» в тексте будет использовано более краткое «расстояние»).
В промежутке между измерением и использованием расстояния из-за движения объектов изменяются. Это различие влияет на точность синхронизации. В прототипе не принимаются меры для уменьшения этого различия. При невысоких скоростях движения объектов указанное различие обычно не требует применения дополнительных действий. Однако для высокоскоростных движущихся объектов требуются дополнительные действия для учета изменения расстояний.
Задачу точной коррекции изменения расстояний выполняет предлагаемый патент, который содержит способ и систему технических средств, снимающих указанное ограничение для системы объектов следующего вида.
В упорядоченной группе объектов, все объекты или часть из них перемещаются. Каждый объект группы должен измерять расстояние до заданного объекта MS, и на основе этого измерения синхронизовать действия объектов. Способ определения расстояния объекта группы от MS не составляет предмет настоящего изобретения и может не отличаться от способа прототипа, но для определения изменений расстояния объекты должны обмениваться с MS сигналами специальным, описанным ниже способом.
Задача настоящего изобретения для способа состоит в быстром определении синхронизации и ее коррекции для быстро движущихся объектов, отсутствующих в прототипе.
Технический результат способа состоит в том, что каждый мобильный объект группы синхронизует действия всех объектов группы, и объекты группы измеряют расстояние до мобильного объекта MS с выполнением следующего условия.
Полученные в момент измерения расстояний между мобильными объектами группы и MS должны корректироваться так, чтобы не отличаться в пределах заданного допустимого значения от реальных удаленностей в момент их использования объектами системы.
Технический результат для способа достигается тем, способ децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, характеризуется тем, что в группе из упорядоченных по 0≤i≤n объектов Oi и объекта MS при отсутствии приема сигналов в течение заданного интервала времени объекты посылают в MS сигнал S фиксированной длительности Т, не менее интервала времени распространения сигналов между любыми объектами Oi и MS, и, в момент прекращения приема сигнала S, объект О0 посылает объекту MS сигнал или сообщение S0ms длительности *Т, а каждый другой объект Oi, при получении от объекта Oi-1 сигнала S(i-1)ms, подобного S0ms, также посылает подобный S0ms сигнал Sims с задержкой τ=i(2T+*Т) и все объекты измеряют интервал времени Tims между началом посылки Sims и началом приема возвращаемого от MS сигнала или сообщения *Sims, при этом объект О0, получив значение T0ms, посылает в MS сигнал (или команду) Sk, которую MS ненаправленными сигналами возвращает как *Sk всем Oi, и Oi, имеющие значение Tims, посылают в MS в пределах интервала Тƒ сигнал St с задержкой D=2(Tmax-Tims)+iTƒ, получают от MS сигнал *St - копию сигнала St, и по интервалу времени между получением *St и St корректируют свое перемещение.
Задача настоящего изобретения для системы состоит в разработке структуры системы, состоящей из группы технических устройств, измеряющих и корректирующих измеренные расстояния между объектами группы и MS так, чтобы они не отличались в пределах заданного допустимого значения от реальных расстояний в момент их использования объектами системы и обеспечивали требуемую точность синхронизации действий объектов.
Технический результат для системы состоит в том, что для повышения точности синхронизации объектов совокупность технических средств системы и связей между ними определяет и корректирует изменения в расстояниях объектов группы относительно объекта MS.
Технический результат для системы достигается тем, что система децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, характеризуется тем, что система состоит из группы О упорядоченных по 0≤i≤n объектов Oi и объединенного с ней беспроводными каналами связи объекта MS, причем каждый объект Oi имеет источник U1, посылаемого объектам О в приемники U2 беспроводного сигнала S, имеет индикатор U3 завершения приема сигнала S, имеет источники U3, U6, U8 посылаемых в объект MS приемникам U11, U13, U15 соответственно сигналов Sims, Ssp, St, имеет приемники U5, U7, U9, посылаемых источниками U12, U14, U16 объекта MS, соответственно сигналов *Sims, *Ssp, *St, имеет блок управления U10, соединенный линиями связи с блоками U1-U9 и с внешним устройством С, организующим посредством U6 связи между О и MS.
Техническая сущность и принцип действия предложенного устройства системы поясняется чертежами.
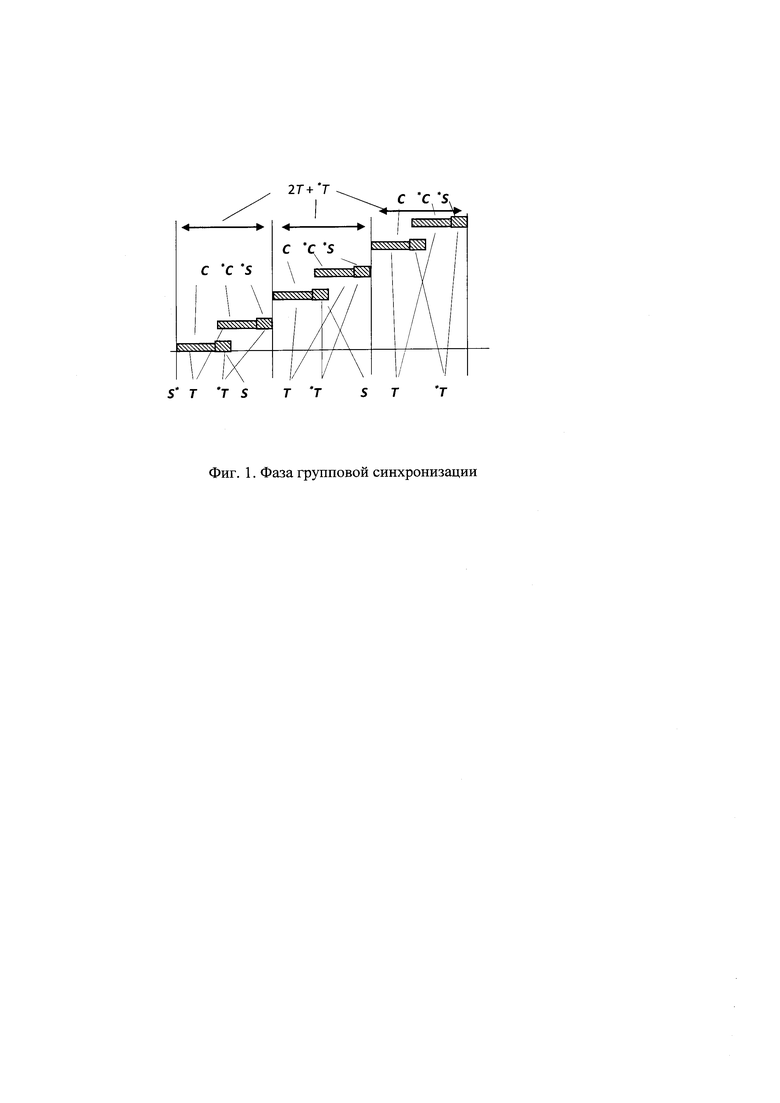
Фиг. 1. Фаза групповой синхронизации.
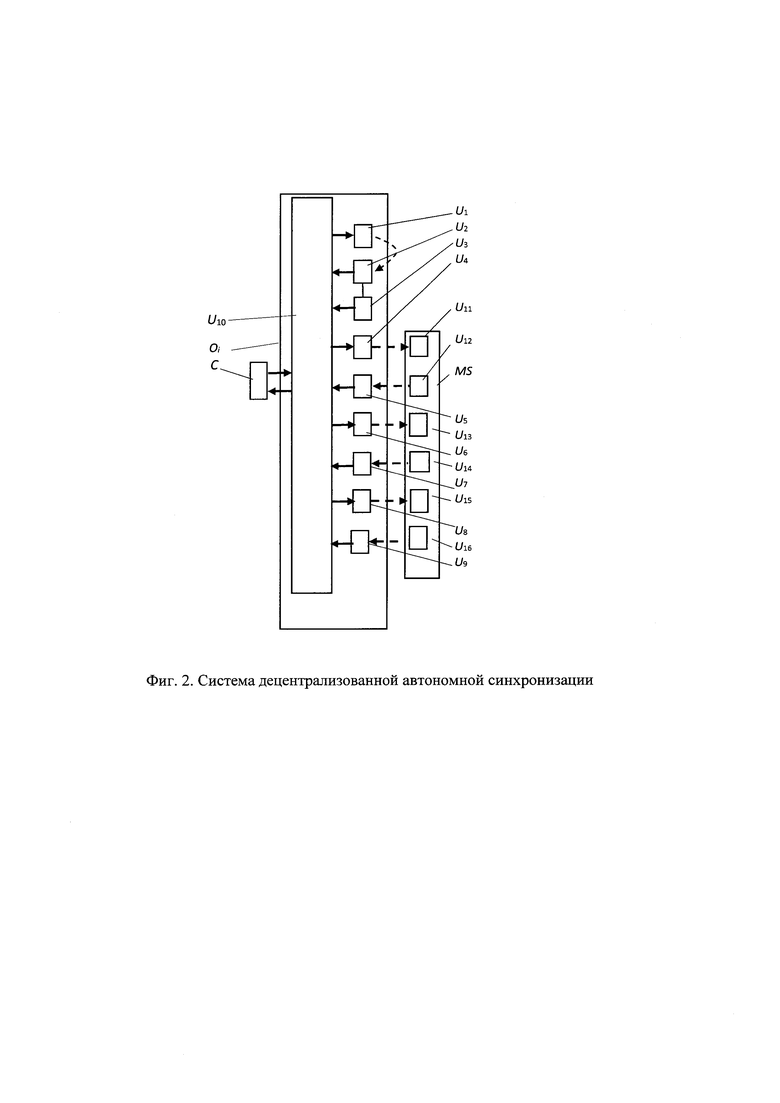
Фиг. 2. Система децентрализованной автономной синхронизации
Приведенные на чертеже устройства следует рассматривать как примеры технической реализации предлагаемого в патенте устройства.
Краткое описание способа децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов. Способ состоит из двух фаз: первой фазы групповой синхронизации (SP0) измерения расстояния между объектами подвижной группы объектов О и объектом MS и второй фазы коррекции расстояния (SP), которая использует действия первой фазы. В момент получения в SP0 значения конкретного расстояния между объектами SP начинает следить за изменениями расстояний. В этот момент времени SP получают от SP0: Tmax - максимальное время, превышающее или равное времени перемещения сигнала между любыми объектами; Tims - время перемещения сигнала между объектом Oi труппы О и объектом MS. Во время работы SP используют сигналы, качественно отличные от сигналов SP0. Поэтому сигналы SP0 и SP не вносят взаимных помех, работают в разных каналах.
В SP для определения изменения удаленностей между упорядоченными объектами Oi и объектом MS произвольный объект из О определяет возможность начала коррекции измеренной удаленности и начинает описанный ниже процесс наблюдения за изменением удаленности, вызванным движением объекта.
Краткое описание системы децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов. Для синхронизации взаимодействия между подвижными объектами группы О и объектом MS все объекты Oi из группы О и MS объединены беспроводными ненаправленными радио или оптическими каналами связи. Объект MS имеет технические средства для приема сигналов от Oi и посылки сигналов к Oi. Объекты Oi имеют средства для обмена сигналами с объектами Oi и MS, а также блок управления, управляющий передачей и приемом указанных сигналов и связи для обмена сигналами с внешним устройством.
Подробное описание предлагаемого способа.
Способ состоит из двух фаз: первой фазы начальной групповой синхронизации (SP0) между объектами подвижной группы объектов О и объектом MS и второй фазы коррекции синхронизации (SP), которая использует действия первой фазы.
В первом способе групповой синхронизации SP0 любой объект 1Oi посылает адресованный MS сигнал для определения времени Tims передачи сигналов и расстояния между объектом группы и MS. Каждый Oi действует автономно, не требуя управления от каких-либо других объектов системы или внешних средств.
Групповая синхронизация выполняется в выделенном только для нее канале связи. Сигналы в этом канале не влияют на сигналы других каналов.
Предполагается, что объекты квазистационарные и за время выполнения всех требуемых измерений перемещение объектов не влияет на заданную точность измерений.
Но в способе любой объект корректирует свою синхронизацию только после завершения очередной групповой синхронизации всеми объектами системы. Ошибка синхронизации накапливается, что снижает точность синхронизации быстрых объектов.
Возможности объектов Οi и MS, их взаимодействие. Объекты Oi и MS имеют средства для передачи и приема беспроводных ненаправленных оптических или радиосигналов. Имеется два типа объектов MS. Первый тип MS принимает от Oi ненаправленный сигнал Sims и в ответ посылает всем объектам Oi сигнал Sims также не направленно.
Второй тип объекта MS работает только с оптическими сигналами и просто отражает сигнал в направлении объекта Oi, пославшего сигнал Sims, т.е. является пассивным устройством - ретрорефлектором. Так как сигналы объектов Oi ненаправленные, то их источнику не нужна информация о расположении приемника.
Объекты Oi группы объектов О упорядочены, 0≤i≤n. Объекты используют три вида сигналов - S, Sims, *Sims, уточненных ниже. Все сигналы ненаправленные (кроме сигналов *Sims ретрорефлекторов). Задан интервал времени Т, достаточный для переноса сигналов между любыми объектами - Oi и MS.
Процесс SP0 состоит из четырех шагов.
Шаг 1. Объекты группы О обнаруживают отсутствие сигналов S, Sims, *Sims в течение заданного интервала времени, не меньшего T и переходят к шагу 2.
Шаг 2. Один или несколько объектов Oi посылают ненаправленный сигнал S длительности не менее Т. При посылке S несколькими объектами эти сигналы накладываются, образуя общий сигнал S не меньшей длительности. При завершении сигнала S объекты переходят к шагу 3. Далее момент завершения сигнала S будем обозначать как S*.
Шаг 3.
Объект О0, при получении S* посылает объекту MS, до которого определяется расстояние, сигнал S0ms длительности *Т. Сигнал достигнет MS не позднее интервала времени Т. В ответ MS пошлет сигнал *S0ms, который достигнет О0 также не позднее интервала времени Т. Через интервал времени 2T+*Т после получения объектом сигнала S* все приведенные сигналы покинут канал связи.
Следующий по порядку объект O1 ожидает прихода сигнала S0ms и с задержкой 2Т+*Т посылает сигнал S1ms длительности *Т объекту MS. Так как к моменту посылки сигнала Sims все инициированные объектом О0 сигналы исчезнут, то они не создадут помех объекту Οi. Аналогично действуют следующие объекты Oi.
Таким образом, каждый объект Oi с i≥1 добавляет к моменту появления Sims, инициирующих передачу объектами сигналов, задержку τ=i(2T+*Т). Объекты измеряют интервал времени Tims между началом посылки сигнала Sims и началом приема сигнала *Sims, возвращаемого объектом MS. При этом учет скорости переноса сигналов позволяет также определить расстояние от объекта Oi до объекта MS.
Таким образом, любой объект Oi получает возможность измерить временную и пространственную удаленность объекта MS.
Одновременно с шагом 3 выполняется шаг 4.
Шаг 4. Процесс SP0. выполняется однократно, завершается по команде от приложения или после обслуживания всех объектов, начавших процесс.
О синхронном варианте шага 3. Выше инициатором действий Ο1 служит обнаружение им события S*, остальные объекты ожидают от предшественника появления сигнала Sims. Но на шаге 3 все объекты могут переходить в режим поочередного определения расстояний, реагируя только на появление S*. Этот вариант ориентирован на наихудшее взаимное расположение объектов.
Комментарий к шагу 3. Рассмотрен синхронный вариант шага 3. Обратимся к фиг.1, где сигналы Sims и *Sims имеют равную длительность *Т.
На рисунке для каждой пары объектов Oi и MS выделены области длительностью 2Т+*Τ для обмена сигналами Sms и *Sms. В пределах каждой области каждому объекту Oi выделена зона С и объекту MS выделена зона *С с длительностями Т, в пределах которых сигналы Sms и *Sms достигнут адресата.
Все объекты группы О обнаруживают момент завершения сигнала S (S* на фиг.1). Объект О0 в этот момент начинает передавать сигнал Sms длительности *Т. Начало этого сигнала достигнет объекта MS не позднее интервала времени Τ и еще через интервал ≤Τ+*Т исчезнет из канала связи, т.е. поля наблюдения объектов. Только после этого объект O1 начнет бесконфликтно выполнять свое измерение для объекта MS. Аналогично поступят следующие объекты группы О.
Таким образом, задержку τ=i(2Τ+*Т) выполняет каждый Oi, что обеспечивает бесконфликтность измерения расстояний объектами и для синхронного шага 3.
Расширение возможностей SP0. Приведем несколько расширений SP0, увеличивающих возможности SP0.
1. Передача в SP0 дополнительной информации. Часто объекту Oi требуется не только определить Tims, но сообщить другим объектам дополнительную информацию. Для этого значение *Т достаточно увеличить до произвольной, единой для всех объектов длительности и в пределах *Т передавать сообщение.
Интервал *Т может также отличаться для разных Oi, о чем объект должен указать в начале *Т. Так как объекты Oi посылают ненаправленные сигналы, то продолжительность *Τ станет известна всем объектам.
2. Перенумерация объектов. Разрешим отдельным объектам Oi не участвовать в SP0, т.е. не передавать сигнал Sims. Если объект не передает Sims, то потребуем, чтобы следующие по порядку i объекты все равно учитывали выделенные «молчащим» объектам задержки τ. Так как объектам известна τ, фиксируется момент появления S* и моменты появления сигналов Sims, то такой учет выполняется просто. Так, например, если «молчат» объекты с i=0, … k, то объект с i=k+1 получит новый номер i=0.
3. Определение количества участников SP0. Процесс SP0 использует n - заранее известное количество участников процесса. Откажемся от этого. Пусть в SP0 объектам задано только максимально допустимое количество расположенных подряд «молчащих» объектов. Превышение этой границы - признак достижения последнего объекта в группе определяет *n - реальное максимальное количество объектов, участников SP0.
Процесс коррекции синхронизации SP.
В SP0 объект Oi получает результат измерения расстояния до объекта MS через интервал времени не больше τ=i(2T+*Т) после начала измерения. При наличии в группе n объектов следующее измерение объект Οi+1 начнет через время nτ. Этот интервал нельзя уменьшить. Если объекту требуется новый отсчет, то объект выполняет его после измерений, проведенных всеми объектами О.
Как показано в SP0, таким интервалом времени часто можно пренебречь. Но при выполнении быстрых процессов, например, распределенных вычислительных операций, интервал времени надо сократить. Он будет в SP сведен к 2L/с за счет частой коррекции Tims, где L - расстояние между указанными объектами, с - скорость света. Коррекция SP выполняется совместно с проведением групповой синхронизации SP0. За время выполнения в SP0 измерения для одного объекта процесс SP проводит измерения для всей группы объектов.
Выполнение коррекции синхронизации. В SP объект MS будет активным объектом, возвращающим ненаправленные сигналы. Рассмотрим общую схему организации SP с использованием SP0. Будем считать, что до начала SP два раза выполнен SP0. После первого выполнения SP0 объекты, используя сообщения *Т, заранее заданным способом выбирают MS (см. расширение 1 в SP0). Однако MS может быть известен и заранее. После второго выполнения становятся известны Tmax - время прихода сигнала в MS от наиболее удаленного от MS объекта и времена Tims.
Процессу SP выделен отдельный канал, в котором передаваемые сигналы не влияют на передачу сигналов SP0. Удобно описать процесс SP, используя логическую шкалу Q, посылаемую объектами Oi в MS. Она состоит из последовательности двоичных разрядов, каждый из которых выделен одному из объектов Oi в соответствии с его номером i. Объект Oi участвует в передаче шкалы, посылая сигнал St в своем разряде шкалы.
Коррекция начинается с действий объекта О0 при получении от SP0 значения T0ms. Объект О0 посылает в MS синхрокоманду (или сигнал) Sk. Объект MS ненаправленными сигналами возвращает ее всем Oi в виде *Sk.
Все объекты Oi, получают *Sk, и объект, успевший от SP0 получить значение интервала Tims, посылает в MS сигнал St в соответствующем ему разряде шкалы Q. Это делается следующим способом.
Сигнал St объект посылает со стандартной для всех Oi задержкой D=2(Tmax-Tims)+iTƒ, где Тƒ - интервал времени передачи разряда шкалы, номер разряда шкалы i≥0. Длительность Тƒ много меньше Т, что увеличивает точность коррекции.
Такие действия размещают каждый сигнал St в соответствующий объекту Oi разряд шкалы. Покажем это.
Пусть *Sk поступила к объекту Omax, максимально удаленному от MS на интервал Tmax. При задержке *D=2 (Tmax-Tims) сигнал от Omax поступит в MS через время 2Tmax после отправки *Sk объектом MS, так как для Omax задержка *D=0. Но и для произвольного объекта Oi его сигнал поступит в MS через время 2Tims+*D=2Tmax. Сигналы St всех объектов поступают в MS одновременно.
При задержке D все объекты получат вначале сигнал *St от объекта О0, затем от Ο1 и т.д, что и требовалось.
Передача объектом Oi сигнала St выполняется сс задержкой 0,5Tƒ, что помещает его в центр разряда шкалы, соответствующего объекту Oi. Размер разряда шкалы (длительность его передачи) выбирается таким, чтобы сигнал St, посылаемый в середину разряда шкалы, при изменении интервала T0ms из-за перемещения объекта, не покинул размеры разряда шкалы.
Объекты Oi получат от MS всю шкалу *Q и в своем разряде шкалы получат сигнал *St - копию отправленного в MS сигнала St. По сдвигу в разряде полученного сигнала объекты корректируют свое перемещение. За время Τ выполняется коррекция для всех Oi.
О вариантах многократной посылки шкалы Q. Для многократной коррекции синхронизации объект 1О0 после завершения приема шкалы *Q вновь посылает команду Sk, и процесс коррекции продолжается. Ценой усложнения объектов коррекцию можно несколько ускорить. Для этого создается шкала Ql, состоящая из произвольно большого количества шкал Q. Объекты помещают сигналы в свои разряды всех шкал Q.
Способы завершения коррекции. Объект 1О0 завершает коррекцию по команде от выполняемого системой приложения или при отсутствии в сети любых сигналов свыше заданного интервала времени. Для завершения шкалы Ql в начало каждой шкалы Q, входящей в Ql, добавим дополнительный управляющий разряд. Объект 1О0 внесет в него команду завершения Ql.
Процесс коррекции завершен.
После получения T0ms от начального двукратного выполнения SP0 процесс SP получает от SP0 только текущие значения Tims. В остальном процесс SP выполняется независимо от SP0. Коррекция устранила имеющуюся в SP0 зависимость точности синхронизации от количества объектов системы.
Приведенное выше двукратное выполнение SP0 перед началом SP требуется при начальном запуске, и должно повторяться только при существенном изменении в системе синхронизации объектов. Например, при смене MS.
Подробное описание предлагаемой системы. Предложенная система устройств обеспечивает техническую реализацию предлагаемого способа. Структура связей объектов системы показана на фиг.2.
Система состоит из объединенных беспроводными ненаправленными каналами передачи оптических или радиосигналов объектов Oi группы Oi упорядоченных по 0≤i≤n, и объекта MS.
Устройство MS способно принимать сигналы Sims, Ssp, St устройств Oi группы О и В ответ на полученные сигналы возвращать объектам Oi сигналы *Sims, *Ssp, *St, отличные от полученных сигналов.
Каждый объект Oi содержит источник U1 сигнала S, посылаемого другим объектам Oi и приемник U2 этого сигнала. Имеет индикатор U3 завершения приема сигнала S. Имеет источник U4 сигнала Sims, посылаемого объекту MS. Имеет приемник U5 сигнала *Sims, возвращаемого в Oi объектом MS, содержащий таймер Tm для отсчета интервала времени между посылкой сигнала Sims и приемом сигнала *Sims. Имеет источник U6 сигнала Ssp, посылаемого объекту MS, имеет приемник U7 сигнала *Ssp, возвращаемого в Oi объектом MS. Имеет источник U8 сигнала *St, посылаемого объекту MS, имеет приемник U9 сигнала *St, возвращаемого в U7 объектом MS. Для управления взаимодействия объекта Oi с другими объектами группы Oi с объектом MS и с конкретным внешним устройством С, объект Oi имеет блок управления U10, соединенный с входами из U10 в блоки U1, U4, U6, U8, соединенный с выходами из блоков U2, U3, U5, U7, U9. Блок U10 содержит узел С11 обмена сигналами с внешним устройством С.
Устройство MS содержит приемники U11, U13, U15 беспроводных сигналов, причем их входы получают сигналы с выходов источников сигналов U4, U6, U8, соответственно, а также содержит источники U12, U14, U16 посылающих беспроводные сигналы соответственно в приемники сигналов U5, U7, U9.
Изобретение относится к области вычислительных средств. Технический результат заключается в повышении точности синхронизации взаимодействия мобильных объектов. Способ децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, характеризующийся тем, что в группе из упорядоченных по 0≤i≤n объектов Oi и объекта MS при отсутствии приема сигналов в течение заданного интервала времени объекты посылают в MS сигнал S фиксированной длительности Т, не менее интервала времени распространения сигналов между любыми объектами Oi и MS, и, в момент прекращения приема сигнала S, объект О0 посылает объекту MS сигнал или сообщение S0ms длительности *Т, а каждый другой объект Oi, при получении от объекта Oi-1 сигнала S(i-1)ms, подобного S0ms, также посылает подобный S0ms сигнал Sims с задержкой τ=i(2T+*Τ) и все объекты измеряют интервал времени Tims между началом посылки Sims и началом приема возвращаемого от MS, посылает в MS сигнал Sk, которую MS ненаправленными сигналами возвращает как *Sk всем Oi, и Oi, имеющие значение Tims, посылают в MS в пределах интервала Tƒ сигнал St с задержкой, получают от MS сигнал *St - копию сигнала St, и по интервалу времени между получением *St и St корректируют свое перемещение. 2 н. и 1 з.п. ф-лы, 2 ил.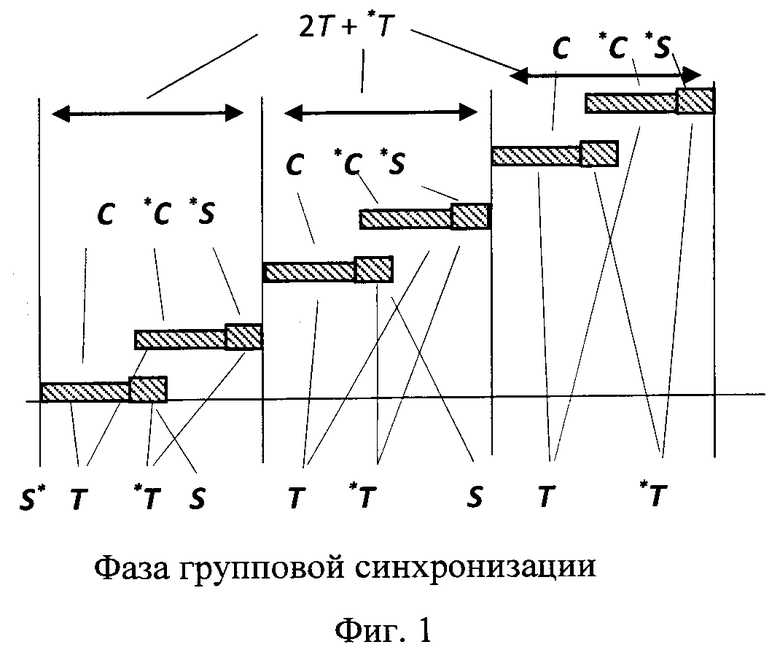
1. Способ децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, характеризующийся тем, что в группе из упорядоченных по 0≤i≤n объектов Oi и объекта MS при отсутствии приема сигналов в течение заданного интервала времени объекты посылают в MS сигнал S фиксированной длительности Т, не менее интервала времени распространения сигналов между любыми объектами Oi и MS, и, в момент прекращения приема сигнала S, объект О0 посылает объекту MS сигнал или сообщение S0ms длительности *Т, а каждый другой объект Oi, при получении от объекта Oi-1 сигнала S(i-1)ms, подобного S0ms, также посыпает подобный S0ms сигнал Sims с задержкой τ=i(2T+*Т) и все объекты измеряют интервал времени Tims между началом посылки Sims и началом приема возвращаемого от MS сигнала или сообщения *Sims, при этом объект О0, получив значение T0ms, посылает в MS сигнал или команду Sk, которую MS ненаправленными сигналами возвращает как *Sk всем Oi, и Oi, имеющие значение Tims, посылают в MS в пределах интервала Тƒ сигнал St с задержкой D=2(Tmax-Tims)+iTƒ, получают от MS сигнал *St - копию сигнала St и по интервалу времени между получением *St и St корректируют свое перемещение.
2. Способ децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов по п. 1, характеризующийся тем, что если объект Oi не передает Sims, то следующие по порядку за Oi объекты выделяют объекту Oi задержку τ и уменьшают на единицу свой порядковый номер i, и если при этом задается максимально допустимая группа следующих подряд не передающих сигналы Sims объектов Oi, то порядковый номер объекта On, непосредственно предшествующего этой группе, равен количеству передающих сигналы Sims объектов группы.
3. Система децентрализованной автономной синхронизации взаимодействия цифровых мобильных объектов, характеризующаяся тем, что система состоит из группы О упорядоченных по 0≤i≤n объектов Oi и объединенного с ней беспроводными каналами связи объекта MS, причем каждый объект Oi имеет источник U1 посылаемого объектам О в приемники U2 беспроводного сигнала S, имеет индикатор U3 завершения приема сигнала S, имеет источники U4, U6, U8 посылаемых в объект MS приемникам U11, U13, U15 соответственно сигналов Sims, Ssp, St, где Ssp - это сигнал коррекции синхронизации, имеет приемники U5, U7, U9 посылаемых источниками U12, U14, U16 объекта MS соответственно сигналов *Sims, *Ssp, *St, имеет блок управления U10, соединенный линиями связи с блоками U1-U9 и с внешним устройством С, организующим посредством U6 связи между О и MS.
| Способ и система управления взаимодействием автономных мобильных технических объектов с быстрой реакцией на изменение состояния объектов и внешней среды | 2018 |
|
RU2697729C1 |
| RU 2012139392 A, 20.03.2014 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 9807569 B2, 31.10.2017. | |||

