Изобретение относится к области вычислительной техники, в частности к способам и техническим средствам синхронизации совместного действия группы стационарных или мобильных управляющих компьютеров, роботов и исполнительных механизмов (далее «объектов»).
Известны способ и система управления взаимодействием автономных мобильных технических объектов с быстрой реакцией на изменение состояния объектов и внешней среды (RU 2697729 С1, 19.08.2018), принятые за прототип.
В прототипе предложен способ доставки приемнику сообщений от группы источников (далее Soi) так, чтобы сигналы одноименных разрядов сообщений при входе в приемник (далее Re1) совмещались. Для этого измерялось время переноса сигнала (удаленность) Ti) от каждого источника Soi до единственного приемника Re1. Измерялась также время удаленность Tmax до Re1 от наиболее удаленного от Re1 источника Somax. Формировалась временная задержка Di=Tmax-T1.
В прототипе показано, что при такой посылке сообщений от объектов Soi к Re1 сигналы их одноименных разрядов совмещались. Показано также, что при замене в Di времени Tmax константой С≥Tmax достигается такое же совмещение. Таким образом, в прототипе достигнута одновременная доставка сообщений и, в частности, отдельных сигналов в единственный приемник. В предлагаемом патенте ставится и решается другая задача, которая использует задержки dj, действующие подобно Di прототипа но для синхронизации не источников, а приемников. В новом патенте группа источников организует одновременный или с заранее заданными для каждого приемника задержками переход группы приемников в требуемые источниками от приемников состояния. Эти действия выполняются в двух вариантах - при условии, что все приемники готовы к выполнению совместных действий или без этого условия. При этом при этом допускается многократное действие приемников, при котором на каждом этапе действий в качестве приемники предыдущего этапа становятся новым источниками.
В патенте использовано также одно из решений статьи Децентрализованная автономная синхронизация процессов взаимодействия мобильных объектов (журнал Проблемы управления №6, 2020 г., стр 46-56; далее статья А). В статье источники сигналов в объектах из группы объектов в произвольные моменты времени посылают поступающий ко всем объектам сигнал S. Сигнал длится в течение интервала времени не менее 2Т, где Т - время перемещения сигнала между наиболее взаимно удаленными объектами группы. Источник посылает сигнал только, если он не принимает сигнал S от других источников. В момент завершения передачи S всеми источниками появится единственный сигнал S*, отмечающий исчезновение S. Через интервал времени, не больший Т, сигнал S* не будет поступать к приемникам. Сигнал S* в статье А используется для синхронизации действий источников при измерении их удаленности от ретранслятора сигналов.
Однако прототип не обеспечивал синхронное выполнение действий приемников, необходимое для приемников, выполняющих согласованные во времени групповые действия. Данный патент решает эту задачу.
Задача настоящего изобретения для способа состоит в синхронизации действий группы приемников - исполнительных механизмов, роботов, компьютеров, выполняющих общие для них действия так, чтобы эти устройства выполняли действия одновременно или с заданной для каждого устройства задержкой.
Технический результат способа состоит в том, что без выделения особого управляющего объекта в ответ на команду источника сигналов или сообщений группа приемников синхронизует свои действия так, что эти устройства выполняют действия одновременно или с заданной для каждого устройства задержкой.
Технический результат для способа достигается тем, что способ децентрализованного управления временем согласованного запуска действий распределенных групп цифровых устройств (объектов), характеризуется тем, что в произвольные моменты времени группа объектов разделяется на группу (So) объектов-источников команд (Soi), группу (Re) объектов-приемников команд (Rej) и ретранслятор сигналов (RS), причем все Soi посылают сигналы в RS с заданной задержкой доставки, а RS без задержки ретранслирует сигналы So приемникам Rej, которые, используя известные им Tj - интервал времени переноса сигнала от RS до Rej, Tmax - интервал времени переноса сигнала от наиболее удаленного от RS приемника до RS, и aj - дополнительную задержку выполнения команды приемником, выполняют команду с общей задержкой *dj=c-tj+aj, причем Rej, не готовые к взаимодействию с So, посылают So запрещающий сигнал и выключают его при готовности; при этом все приведенные действия допускают многократное действие приемников Re на каждом этапе действий в качестве новых источников из So.
Задача настоящего изобретения для системы состоит в формировании системы, состоящей из двух групп технических устройств - источников сообщений-команд и их приемников, обеспечивающей выполнение способа.
Технический результат для системы устройств состоит в том, что в отличие от прототипа совокупность технических средств системы и связей между ними синхронизует действия приемников сообщений-команд, обеспечивая их выполнение одновременно или с заданной задержкой.
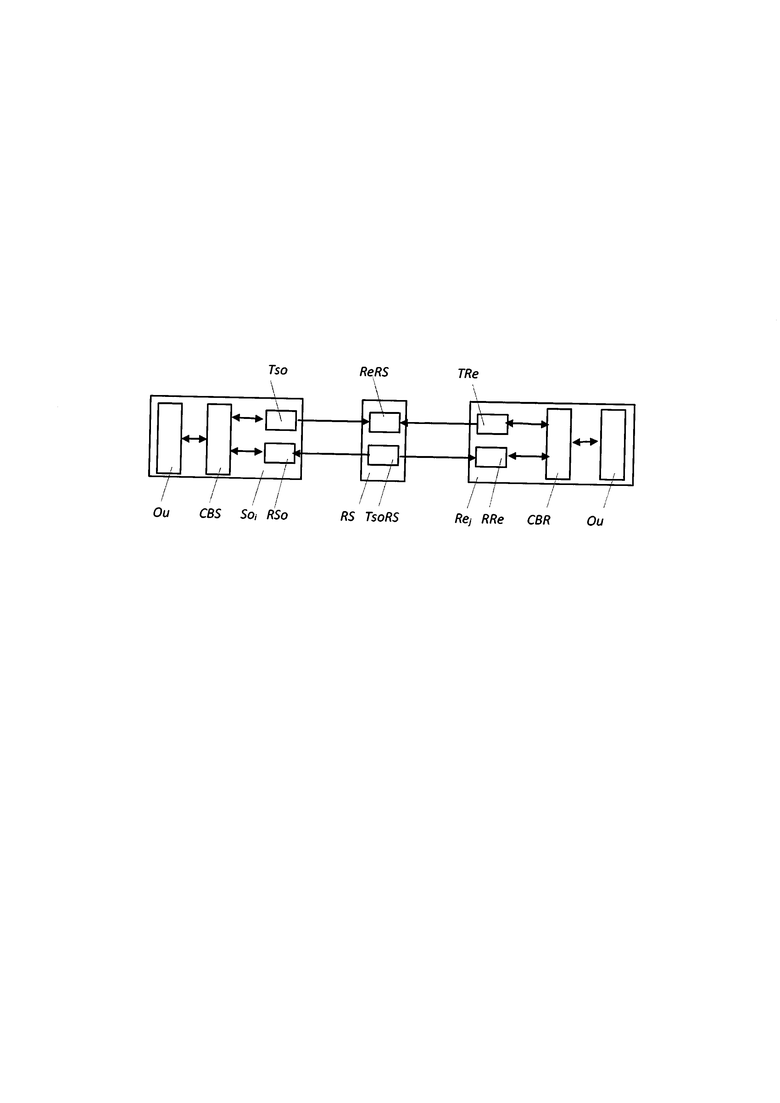
Технический результат для системы достигается тем, что система децентрализованного управления временем согласованного запуска действий распределенных групп цифровых устройств (объектов), характеризуется тем, что система содержит группу So источников команд Soi, группу Re приемников команд Rej и ретранслятор RS сигналов источников и приемников, направляемых соответственно приемникам и источникам, причем каждый источник и приемник имеют проводные или беспроводные, оптические или радиоканалы связи с ретранслятором RS, источник имеет передатчик TSo двоичных сигналов, посылаемых в RS, и приемник RSo двоичных сигналов, принимаемых от RS; приемник имеет передатчик TRe двоичных сигналов, посылаемых в RS, и приемник RRe сигналов, принимаемых от RS, ретранслятор имеет приемники ReRS сигналов источников и приемников, имеет передатчики TsoRS сигналов, посылаемых источникам и приемникам, причем выходы приемников ReRS подключены к входам передатчиков TsoRS, а объекты Soi и Rej имеют блоки управления CBS и CBR соответственно, управляющие действиями передатчиков и приемников этих объектов, а также взаимодействием с Ou - внешним по отношению к Soi и Rej устройствам.
Техническая сущность и принцип действия предложенного устройства поясняется чертежом.
На чертеже представлена структура взаимодействующих систем мобильных объектов.
Приведенные на чертеже устройства следует рассматривать как примеры технической реализации предлагаемого в патенте устройства.
Краткое описание предлагаемого способа. В способе группа So объектов-источников Soi посылает сообщения-команды группе Re выполняющих совместные действия объектов-приемников Rej. В командах определены требуемые действия приемников и задержка их выполнения после получения приемниками команды. Источники посылают также сообщение-команду, назовем ее U, информирующую объекты-приемники о начале выполнения требуемых действий.
Сообщения-команды источники посылают приемникам через ретранслятор сигналов RS. Источники и приемники заранее или в независимом процессе определяют их удаленность от RS. Определив удаленность от RS, получив команды и получив U, приемники синхронно выполняют совместные действия с заданными временными задержками относительно момента получения U.
Краткое описание предлагаемой системы. Для синхронизации выполнения совместных действий группой объектов-приемников команд система содержит следующие объекты и связи между ними. Система содержит группу So источников команд Soi, группу Re приемников команд Rej и ретранслятор RS сигналов источников и приемников, направляемых соответственно приемникам и источникам. Каждый источник имеет проводные или беспроводные, оптические или радиоканалы связи с ретранслятором RS. Каждый приемник Rej имеет с ретранслятором RS такие же каналы связи.
Подробное описание предлагаемого способа. Способ выполняет следующую синхронизацию действий источников и приемников команд синхронизации.
Имеется группа So источников сообщений Soi и группа Re приемников Rej. Имеется также ретранслятор RS, через который сигналы Soi поступают в Rej. Требуется организовать работу группы So так, чтобы приход ее команд в Re был одновременным или с заданными временными задержками после прихода команды U. До начала синхронизации объекты Re получают значение времени переноса сигнала между ними и RS.
Процесс синхронизации приемников состоит из двух фаз. В первой фазе источники отправляют каждому приемнику команду, содержащую инструкцию по ее выполнению, включая задержку во времени после получения команды U. Эти действия не отличаются от действий объектов-источников в прототипе и статье А. Каждая команда посылается отдельным сообщением или в одном, общем для всех приемников сообщении, посылаемом синхронно источниками через RS. Это сообщение состоит из последовательности сообщений отдельных источников или из одного сообщения, в котором одноименные разряды сообщений источников совмещены при входе в RS.
Вторую фазу источники начинают синхронной посылкой через RS команды U. Команда может содержать единственный двоичный разряд *U или последовательность двоичных разрядов 0 и 1, несущих вспомогательные для приемников данные. Разряды последовательности передаются сигналами различных частот ƒ0 и ƒ1 соответственно. Одноименные разряды последовательностей могут в RS совмещаться, формируя сообщение с количеством двоичных разрядов равным количеству источников. Источник, подтверждающий свою команду фазы 1, вносит в свой разряд единицу, и по наличию единиц в разрядах приемники определят источники, подтверждающие затребованные ими от Re действия. В общем случае достаточно меть один сигнал, но группа сигналов определяет согласие всех источников на выполнение команды. Ретранслятор полученные сигналы от Soi на частотах ƒ0 и ƒ1 транслирует приемникам соответственно на других частотах *ƒ0 и *ƒ1.
Каждый приемник, получив U, начинает отсчет задержки начала выполнения требуемого действия. Эта задержка dj для приемника Rej определяется соотношением dj=с-tj. Здесь константа с≥tmax, tj - интервал времени переноса сигнала между Rej и RS, tmax - интервал времени переноса сигнала между наиболее удаленным от RS приемником Rej и RS.
При выполнении задержек dj все приемники начинают выполнение требуемого действия одновременно. Требования процесса синхронизации приемников выполнены.
Если в первой фазе источники для каждого Rej укажут дополнительно задержку aj, то приемник начнет действия с этой дополнительной задержкой *dj=с-tj+aj.
Способ синхронизации дополняет скоростная барьерная синхронизация, которая позволит источникам определить момент готовности приемников группы Re к взаимодействию с источниками. Для этого используются дополнительно сигналы частот ƒ2 и *ƒ2. Приемники Rej, получившие от источника Soi запрос на взаимодействие и не готовые к нему, посылают в RS сигнал ƒ2. В ответ RS переведет его в *ƒ2 и все Soi его получат. Приемник, готовый к взаимодействию, выключает сигнал ƒ2. В момент готовности всех приемников исчезнут сигналы ƒ2 и *ƒ2, что служит сигналом барьерной синхронизации, разрешающим приемникам послать команды.
Барьерная синхронизация была применена в прототипе для проверки готовности всех источников к началу совместной работы. Здесь она определяет готовность приемников к взаимодействию с источниками.
Еще один вид действий при синхронизации приемников обеспечиват доставку сообщений через цепочки приемо-передатчиков Rei+Soi с приходом сообщений в конечные объекты с заданными временными задержками. Когда синхронизированные приемники выполнят изложенные выше действия, они могут действовать как источники в предыдущем процессе синхронизации, выбрать в качестве приемников новый набор объектов и провести новый этап синхронизации и т.д.
Подробное описание предлагаемой системы. Предложенная система устройств организована с учетом требований предложенного в патенте способа. Структура системы показана на фиг. 1.
Для синхронизации выполнения совместных действий группой объектов-приемников команд система содержит следующие объекты и связи между ними. Система содержит группу So источников команд Soi, группу Re приемников команд Rej и ретранслятор RS сигналов источников и приемников. Каждый источник имеет проводные или беспроводные, оптические или радиоканалы связи с ретранслятором RS. Каждый приемник Rej имеет с ретранслятором RS такие же каналы связи.
Источник имеет передатчик TSo двоичных сигналов, посылаемых в RS, и приемник RSo двоичных сигналов, принимаемых от RS. Приемник имеет передатчик TRe двоичных сигналов, посылаемых в RS, и приемник RRe сигналов, принимаемых от RS. Ретранслятор имеет приемники ReRS сигналов источников и приемников, имеет передатчики TsoRS сигналов, посылаемых источникам и приемникам. Выходы приемников ReRS подключены к входам передатчиков TsoRS. Объекты Soi и Rej имеют блоки управления CBS и CBR соответственно, управляющие действием передатчиков и приемников этих объектов. Если объекты Soi и Rej входят в состав внешних для них объектов Ou, то блоки управления CBS и CBR выполняют также взаимодействие с внешними объектами.
Для упрощения на чертеже показаны только по одному объекту Soi и Rej, так как все объекты групп идентичны.
Изобретение относится к способам и устройствам синхронизации совместного действия группы цифровых устройств. Технический результат заключается в обеспечении синхронизации действий группы приемников. Технический результат достигается за счет того, что в произвольные моменты времени группа объектов разделяется на группу объектов-источников команд, группу объектов-приемников команд и ретранслятор сигналов, причем все источники посылают сигналы в ретранслятор с заданной задержкой доставки, a ретранслятор без задержки ретранслирует сигналы источников приемникам, которые, используя известные им интервалы времени переноса сигнала, интервал времени переноса сигнала от наиболее удаленного приемника до ретранслятора и дополнительную задержку выполнения команды приемником, выполняют команду с общей задержкой, причем приемники, не готовые к взаимодействию с источниками, посылают источникам запрещающий сигнал и выключают его при готовности; при этом все приведенные действия допускают многократное действие приемников на каждом этапе действий в качестве новых источников. 2 н.п. ф-лы, 1 ил.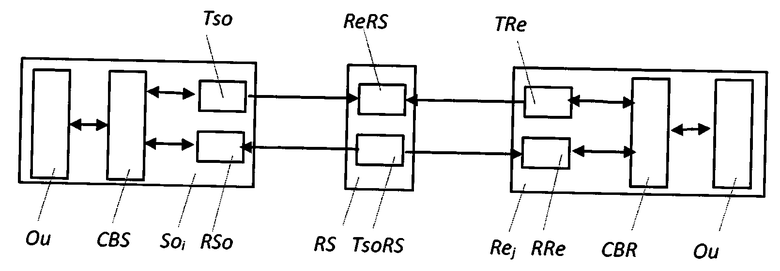
1. Способ децентрализованного управления временем согласованного запуска действий распределенных групп цифровых устройств (объектов), характеризующийся тем, что в произвольные моменты времени группа объектов разделяется на группу (So) объектов-источников команд (Soi), группу (Re) объектов-приемников команд (Rej) и ретранслятор сигналов (RS), причем все Soi посылают сигналы в RS с заданной задержкой доставки, а RS без задержки ретранслирует сигналы So приемникам Rej, которые, используя известные им Tj - интервал времени переноса сигнала от RS до Rej, Tmax - интервал времени переноса сигнала от наиболее удаленного от RS приемника до RS и aj - дополнительную задержку выполнения команды приемником, выполняют команду с общей задержкой *dj=с-tj+aj, причем Rej, не готовые к взаимодействию с So, посылают So запрещающий сигнал и выключают его при готовности; при этом все приведенные действия допускают многократное действие приемников Re на каждом этапе действий в качестве новых источников из So.
2. Система децентрализованного управления временем согласованного запуска действий распределенных групп цифровых устройств (объектов), характеризующаяся тем, что система содержит группу So источников команд Soi, группу Re приемников команд Rej и ретранслятор RS сигналов источников и приемников, направляемых соответственно приемникам и источникам, причем каждый источник и приемник имеют проводные или беспроводные, оптические или радиоканалы связи с ретранслятором RS, источник имеет передатчик TSo двоичных сигналов, посылаемых в RS, и приемник RSo двоичных сигналов, принимаемых от RS; приемник имеет передатчик TRe двоичных сигналов, посылаемых в RS, и приемник RRe сигналов, принимаемых от RS, ретранслятор имеет приемники ReRS сигналов источников и приемников, имеет передатчики TsoRS сигналов, посылаемых источникам и приемникам, причем выходы приемников ReRS подключены к входам передатчиков TsoRS, а объекты Soi и Rej имеют блоки управления CBS и CBR соответственно, управляющие действиями передатчиков и приемников этих объектов, а также взаимодействием с Ou - внешним по отношению к Soi и Rej устройствам.
| EP 3291467 B1, 20.05.2020 | |||
| US 9867153 B2, 09.01.2018 | |||
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ и система для быстрого измерения интервалов времени переноса сигнала между подвижными объектами и центром ретрансляции сообщений | 2018 |
|
RU2687222C1 |

