Изобретение относится к транспортному средству водного скольжения, включающему в себя корпус, по меньшей мере, одно сиденье и два расположенных по бокам от корпуса и опосредованно или непосредственно соединенных с корпусом выносных поплавка, причем с каждым выносным поплавком согласован управляемый отдельно в отношении своей приводной мощности приводной блок в каждом случае, по меньшей мере, с одним приводимым в движение двигателем, в частности электродвигателем, рабочим винтом.
Из US 2004/0168623 A1 (многокорпусное персональное судно) известно водное транспортное средство для проведения свободного времени с двумя (катамаран) или несколькими (тримаран) корпусами и одним или несколькими сиденьями. Для приведения в движение предусмотрены один или несколько водовыпусков реактивных приводов. Они могут быть расположены между корпусами или в и соответственно на корпусах. Корпуса могут иметь при этом такие размеры, что все компоненты или часть компонентов реактивного привода могут размещаться в них. Для управления водным транспортным средством предусмотрено вне зависимости или в зависимости друг от друга регулировать выброс воды водовыпусков при помощи соответствующих средств управления. Вследствие этого может, например, уменьшаться радиус поворота водного транспортного средства, и может достигаться улучшенный контроль управления. Могут быть предусмотрены два двигателя, которые в каждом случае согласованы с насосом. Управление может также осуществляться при помощи двигателя, который приводит в действие два насоса, причем между двигателем и насосами предусмотрены управляемые вне зависимости друг от друга средства для воздействия на передачу энергии от двигателя к насосам. Также с одним двигателем и одним насосом могут быть согласованы несколько водовыпусков, причем объемный поток к водовыпускам регулируется отдельно. Равным образом предлагается оказывать воздействие на направление потока выходящей струи воды или изменять ориентацию реактивного привода.
В EP 2 585 363 B1 описано водное транспортное средство для использования в свободное время с одним средним корпусом и двумя корпусами, которые установлены по бокам и со смещением назад относительно среднего корпуса и могут отсоединяться. Боковые корпуса выполнены в виде закрытых поплавков. Они включают в себя в варианте осуществления изобретения в каждом случае двигатель (двигатель гидроцикла). Боковые корпуса соединены друг с другом рамой. Средний корпус соединен с возможностью поворота вокруг проходящей под наклоном к поверхности воды оси поворота с рамой и тем самым с боковыми корпусами. Он выполнен открытым сверху и удерживает сиденье для пассажира. На раме смонтированы ручки. Пассажир может посредством перемещения веса тела и оказания давления на ручки поворачивать средний корпус относительно рамы и тем самым боковых корпусов вокруг оси поворота и таким образом управлять водным транспортным средством. Дополнительно может быть предусмотрено оказывать воздействие на направление движения посредством подходящего управления двигателями.
Боковые корпуса могут монтироваться в различных положениях поперек и вдоль к направлению движения, и тем самым может оказываться влияние на водоходные свойства водного транспортного средства.
DE 195 38 563 A1 показывает трехкилевую лодку с передней носовой частью и двумя соединенными с нею боковыми частями. В боковых частях в каждом случае предусмотрен электродвигатель с расположенным между отверстием впуска воды и отверстием выпуска воды, приводимым в движение электродвигателем приводным ротором. Они приводят в движение водное транспортное средство. Водное транспортное средство может управляться при помощи обоих приводов. Для этого двигатели соединены в каждом случае проволочным тросом с рычагом управления. Частота вращения двигателей может устанавливаться вследствие этого по-разному, и направление движения водного транспортного средства может изменяться.
Недостатком у известных водных транспортных средств является механическая регулировка мощности двигателя. Для этого должны, например, тросы Боудена или другие механические регулировочные устройства прокладываться от руля на корпусе водного транспортного средства к двигателям в выносных поплавках, вследствие чего монтаж и демонтаж выносных поплавков затрудняется. Такой монтаж и демонтаж легко приводит далее к рассогласованию механических регулировочных устройств, причем уже незначительная разъюстировка приводит к различным установкам мощностей двигателей, и водное транспортное средство больше не может точно управляться.
Задача изобретения создать транспортное средство водного скольжения с одним корпусом и двумя расположенными по бокам выносными поплавками, которое может просто монтироваться и для транспортировки может просто демонтироваться, без того чтобы посредством монтажа или демонтажа ухудшались ходовые качества.
Задача изобретения решается вследствие того, что руль транспортного средства водного скольжения соединен с пропорциональным датчиком, и что управляющий сигнал пропорционального датчика подан на блок управления, который опосредованно или непосредственно управляет двигателями в зависимости от управляющего сигнала пропорционального датчика. Для управления двигателями требуются таким образом электрические соединения между рулем и выносными поплавками, которые могут просто разъединяться и снова соединяться. Разъюстировка посредством монтажа или демонтажа может исключаться, так что на управляемость не оказывается отрицательное влияние. Благодаря пропорциональному датчику положение руля может очень точно регистрироваться и преобразовываться в управляющие сигналы для двигателей, так что создаются условия для точного управления транспортным средством водного скольжения. Так как для управления дальнейшие механические регулировочные устройства смещаться не должны, управление является очень легкоходным. Кроме того, преобразование управления пропорциональным датчиком является по сравнению с механическими решениями экономичным. Регулировка мощностей двигателей может осуществляться напрямую блоком управления, или блок управления может управлять дальнейшими, подключенными после узлами, которые в таком случае управляют двигателями.
Установка мощности может происходить предпочтительно на двигателях, при использовании двигателей внутреннего сгорания, например, элетромеханическими исполнительными элементами.
Для того чтобы предотвращать то, что при использовании электродвигателей кабели силовой электрической цепи должны прокладываться между выносными поплавками и корпусом, может быть предусмотрено, что в каждом случае система управления двигателем с регулятором мощности расположена в выносных поплавках и соединена с блоком управления, и что системы управления двигателями регулируют мощность согласованного в каждом случае двигателя в зависимости от управляющего сигнала пропорционального датчика. Предпочтительно в этом случае также аккумуляторы для электропитания двигателей расположены в выносных поплавках. Между корпусом и выносными поплавками должны прокладываться в итоге только линии цепи управляющего тока. В качестве регуляторов мощности могут быть использованы, например, рассчитанные соответствующим образом силовые транзисторы, которые управляются в зависимости от управляющего сигнала и регулируют протекание тока между электропитанием и двигателем.
Помехи в передаче сигналов между рулем и регуляторами мощности двигателей могут предотвращаться вследствие того, что блок управления преобразовывает аналоговый управляющий сигнал пропорционального датчика, по меньшей мере, в один цифровой управляющий сигнал, или что пропорциональный датчик выдает цифровой управляющий сигнал, и что цифровой управляющий сигнал подан через соединения передачи данных на расположенные в или на выносных поплавках системы управления двигателями, которые в зависимости от цифрового управляющего сигнала регулируют мощность согласованного в каждом случае двигателя. Цифровые управляющие сигналы имеют по сравнению с аналоговыми управляющими сигналами меньшую подверженность помехам и лучшие возможности для контроля достоверности сигналов. Вследствие этого могут предотвращаться ошибки при управлении двигателями, и тем самым может повышаться эксплуатационная надежность транспортного средства водного скольжения.
Согласно предпочтительному варианту осуществления изобретения может быть предусмотрено, что на блок управления подан сигнал скорости регулятора скорости транспортного средства водного скольжения, и что сигнал скорости учтен при происходящем в зависимости от управляющего сигнала пропорционального датчика управлении двигателями. Так может быть предусмотрено, что при установке регулятора скорости на ноль манипулирование рулем не приводит к приведению в действие одного из двигателей. Непреднамеренное приведение в действие одного из двигателей, Например, при посадке на транспортное средство водного скольжения, может таким образом предотвращаться. При средней установке регулятора скорости может быть предусмотрено, что для управления транспортным средством водного скольжения мощность одного двигателя повышается, а мощность другого двигателя понижается, для того чтобы таким образом делать возможным движение по кривой. Альтернативно этому может быть предусмотрено, что повышается только мощность одного двигателя, или понижается только мощность противоположного двигателя, для того чтобы перемещаться по кривой. Также возможно повышение мощности расположенного на внешней дуге двигателя и одновременное понижение мощности расположенного на внутренней дуге двигателя. При установленной максимальной скорости мощность одного двигателя может для управления понижаться, в то время как другой двигатель по-прежнему работает с максимальной мощностью.
Для того чтобы для двигателей получать в каждом случае один сигнал управления, который содержит как данные о скорости, так и управляющие данные, может быть предусмотрено то, что блок управления генерирует из управляющего сигнала пропорционального датчика и сигнала скорости регулятора скорости, по меньшей мере, один цифровой сигнал управления и подает его на системы управления двигателями, и/или что блок управления генерирует из сигнала скорости регулятора скорости цифровой сигнал скорости и подает его на системы управления двигателями. Сигнал скорости регулятора скорости и управляющий сигнал пропорционального датчика могут таким образом преобразовываться блоком управления, по меньшей мере, в один комбинированный цифровой сигнал для обеих систем управления двигателями, которые на основе этого управляют двигателями. Альтернативно сигнал скорости и управляющий сигнал могут оцифровываться блоком управления по отдельности и подаваться на системы управления двигателями, которые затем из цифрового управляющего сигнала и цифрового сигнала скорости генерируют в каждом случае один аналоговый сигнал управления для согласованного в каждом случае двигателя.
Простое и высокоточное управление транспортным средством водного скольжения может достигаться благодаря тому, что пропорциональный датчик выполнен в виде инкрементального датчика или потенциометра или емкостного пропорционального датчика.
Предпочтительно может быть предусмотрено, что соединение передачи данных между блоком управления и системами управления двигателями осуществляется при помощи линий передачи данных или радиолиний. При использовании радиолиний предпочтительно не должны располагаться кабели между корпусом и выносными поплавками.
Если предусмотрено, что соединение передачи данных выполнено двунаправленным, то данные могут передаваться как от блока управления на системы управления двигателями, так и от систем управления двигателями на блок управления. Так, например, данные по двигателям могут регистрироваться системами управления двигателями и передаваться на блок управления.
Согласно варианту осуществления изобретения может быть предусмотрено, что с каждым двигателем согласован аккумуляторный блок из соединенных аккумуляторов, что уровень заряда аккумуляторных блоков регистрируется и подается через соединение передачи данных на блок управления, и что блок управления рассчитан для того, чтобы для обоих двигателей одинаково ограничивать максимально устанавливаемую мощность двигателей в зависимости от уровня заряда максимально разряженного аккумуляторного блока. Передача данных об уровне заряда аккумуляторных блоков может осуществляться при этом, например, от систем управления двигателями на блок управления. Благодаря одинаковому с обеих сторон ограничению мощности двигателей может предотвращаться, что двигатели ввиду различных уровней заряда согласованных аккумуляторов работают с различными мощностями.
Для того чтобы достигать точной синхронизации полезной мощности обоих двигателей и гарантировать вследствие этого точное прямолинейное движение транспортного средства водного скольжения, может быть предусмотрено, что температура двигателей и/или температура аккумуляторов и/или температура блока управления регистрируется и учитывается при ограничении максимально устанавливаемой мощности двигателей. Эти значения могут учитываться при этом дополнительно к уровню заряда соответствующего аккумуляторного блока.
Простая транспортабельность транспортного средства водного скольжения может достигаться вследствие того, что выносные поплавки разъемно соединены с корпусом, и/или что линии передачи данных между блоком управления и системами управления двигателями выполнены разъемными, в частности, со штепсельными разъемами. Выносные поплавки таким образом могут просто отсоединяться от корпуса, и узлы могут по отдельности транспортироваться. Линии передачи данных могут разъединяться на выполненных предпочтительно с защитой от воды штепсельных разъемах. Это делает возможным значительно более простой демонтаж выносных поплавков, чем это возможно при механических средствах управления, таких как тросы Боудена и т.д. При использовании радиолиний между блоком управления и системами управления двигателями кабельные соединения между корпусом и выносными поплавками не должны разъединяться, вследствие чего демонтаж, также как и будущий монтаж транспортного средства водного скольжения может дополнительно упрощаться.
Наиболее компактная конструкция корпуса для транспортировки может достигаться вследствие того, что рулевая колонка, которая удерживает руль, соединена с возможностью откидывания с корпусом. Рулевая колонка может таким образом откидываться для транспортировки на корпус, вследствие чего габаритные размеры корпуса могут значительно сокращаться. Так как механические средства управления между рулем и выносными поплавками не требуются, механизм откидывания рулевой колонки может выполняться очень просто. При использовании линий передачи данных между блоком управления и системами управления двигателями эти линии могут проводиться через откидное соединение между рулевой колонкой и корпусом. Альтернативно этому линии передачи данных могут быть подведены в области откидного соединения к контактам, которые при откинутой рулевой колонке замкнуты, а при убранной (сложенной) рулевой колонке разомкнуты. Предпочтительно двигатели не могут приводиться в действие при убранной рулевой колонке.
Ходовые качества и управляемость транспортного средства водного скольжения могут улучшаться вследствие того, что на выносных поплавках в каждом случае расположены один или несколько приводимых в действие электродвигателем элементов управления, и что эти приводимые в действие электродвигателем элементы управления могут управляться в зависимости от управляющего сигнала и/или сигнала скорости и/или, по меньшей мере, одного цифрового сигнала управления, образованного из управляющего сигнала и сигнала скорости. Приводимые в действие электродвигателем элементы управления регулируются таким образом в дополнение к двигателям в зависимости от положения руля или регулятора скорости.
При этом может быть предусмотрено, что в качестве приводимых в действие электродвигателем элементов управления на выносных поплавках могут приводиться в действие установленные с возможностью поворота рулевые поверхности и/или кормила (рулевые весла) и/или расположенные с возможностью поворота управляющие сопла и/или расположенные с возможностью поворота гондолы с рабочими винтами. Посредством всех этих элементов управления может оказываться рулевое действие, которое действует в дополнение к управлению двигателями.
Для того чтобы делать возможным задний ход транспортного средства водного скольжения, может быть предусмотрено, что направление тяги приводных блоков может обращаться. Для этого по сравнению передним ходом обращается предпочтительно направление вращения двигателей, так что рабочие винты вращаются в противоположном направлении. Управление транспортным средством водного скольжения осуществляется при этом в соответствии с управлением при движении вперед посредством различного приведения в действие обоих двигателей. Посредством обращения направления тяги только одного приводного блока, в то время как другой приводной блок по-прежнему работает в прямом направлении, может помимо этого достигаться движение по очень узкой кривой.
Изобретение разъясняется в дальнейшем более подробно при помощи изображенного на чертежах примера осуществления. Показано:
фиг.1 - на виде в перспективе сбоку транспортное средство водного скольжения;
фиг.2 - показанное на фиг.1 транспортное средство водного скольжения на виде сбоку;
фиг.3 - показанное на фиг.1 и 2 транспортное средство водного скольжения на виде сзади;
фиг.4 - корпус показанного на фиг.1, 2 и 3 транспортного средства водного скольжения в положении транспортировки и на виде сбоку;
фиг.5 - показанное на фиг.4 транспортное средство водного скольжения на виде в перспективе сбоку;
фиг.6 - транспортное средство водного скольжения с фиг.1 с дополнительно установленными рулевыми поверхностями;
фиг.7 - транспортное средство водного скольжения с фиг.2 с дополнительно установленными кормилами;
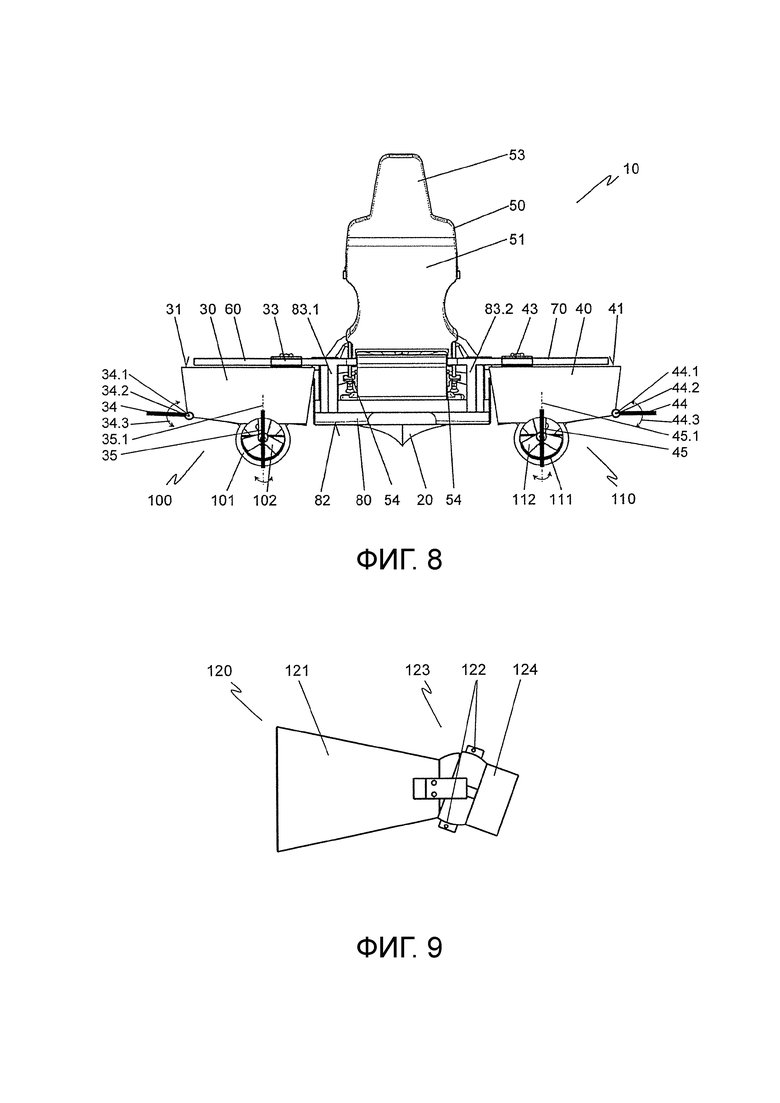
фиг.8 - транспортное средство водного скольжения с фиг.3 с дополнительно установленными рулевыми поверхностями и кормилами; и
фиг.9 - сопловая система для транспортного средства водного скольжения.
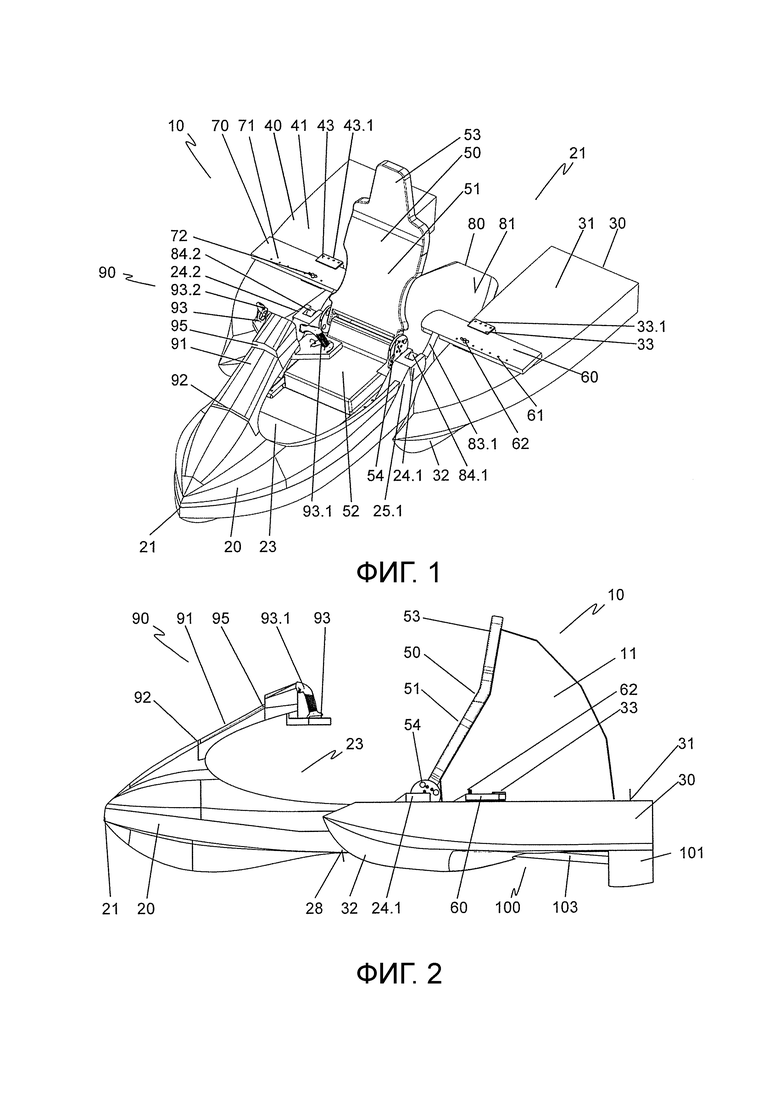
Фиг.1 показывает на виде в перспективе сбоку транспортное средство 10 водного скольжения. Транспортное средство 10 водного скольжения создано из корпуса 20 и двух выносных поплавков 30, 40, расположенных по бокам и со смещением назад по направлению к корме 21 транспортного средства 10 водного скольжения. Корпус 20 удерживает сиденье 50 с поверхностью 52 сиденья, спинкой 51 и подголовником 53. Спинка 51 соединена шарнирным соединением 54 с поверхностью 52 сиденья. Перед поверхностью 52 сиденья корпус 20 образует пространство 23 для ног. С системой 90 управления согласованы рулевая колонка 91 и руль 93. Рулевая колонка 91 ориентирована, исходя от носа 21 транспортного средства 10 водного скольжения, под наклоном вверх к сиденью 50. На своем обращенном к носу 21 конце рулевая колонка 91 соединена откидным соединением 92 с корпусом 20. На противоположном конце руль 93 соединен поворотным шарниром 95 с рулевой колонкой 91. Руль 93 удерживает в показанном варианте осуществления две ручки 93.1, 93.2 управления, на которых расположены показанные на фиг. 6 элементы 94 ручного управления. Кроме того, на руле 93 расположен обращенный к сиденью 50 и неизображенный дисплей. В альтернативном варианте осуществления руль может быть также выполнен в виде штурвала или рулевого колеса.
В продолжение корпуса 20 и между выносными поплавками 30, 40 предусмотрена пластина 80 скольжения. В показанном откинутом рабочем положении верхняя сторона 81 пластины 80 скольжения обращена от поверхности воды, в то время как показанная на фиг.3 поверхность 82 скольжения пластины 80 скольжения обращена к поверхности воды. По бокам на пластине 80 скольжения расположены вертикальные ребра 83.1, 83.2. Вертикальные ребра 83.1, 83.2 соединены шарнирными соединениями 84.1, 84.2 с шарнирными опорами 24.1, 24.2, которые расположены на расположенных по бокам на корпусе 20 опорных ребрах 25.1, 25.2. На вертикальных ребрах 83.1, 83.2 пластины 80 скольжения расположены держатели 60, 70 для закрепления выносных поплавков 30, 40. На верхних сторонах 31, 41 выносных поплавков 30, 40 установлены крепежные устройства 33, 43. Крепежные устройства 33, 43 образуют U-образные крепежные участки 33.1, 43.1, в которые введены держатели 60, 70. На противоположной крепежным участкам 33.1, 43.1 стороне держатели 60, 70 имеют крепежные гнезда 61, 71 в виде отверстий. Держатели 60, 70 соединены крепежными элементами 62, 72, которые проведены через крепежные отверстия 61, 71, с крепежными устройствами 33, 43. На сторонах, противоположных верхним сторонам 31, 41, выносные поплавки 30, 40 образуют обращенные к воде нижние стороны 32, 42.
Фиг.2 показывает изображенное на фиг.1 транспортное средство 10 водного скольжения на виде сбоку. Между спинкой 51 сиденья 50 и показанной на фиг.1 верхней стороной 81 пластины 80 скольжения натянута надувная подушка 11. Будучи не надута, подушка 11 может убираться в спинку 51 сиденья 50. Альтернативно или дополнительно этому в спинку 51 или в пластину 80 скольжения может быть встроен неизображенный надувной матрац. Надувной матрац может при необходимости надуваться и тянуться транспортным средством 10 водного скольжения. Для этого надувной матрац предпочтительно привязан к транспортному средству 10 водного скольжения. Надувной матрац предоставляет место для второго пассажира и может также использоваться в чрезвычайной ситуации при необходимом спасении людей.
Пластина 80 скольжения расположена в своем рабочем положении таким образом, что она своей показанной на фиг.3 нижней поверхностью 82 скольжения непосредственно прилегает к нижней стороне 28 корпуса 20. Нижняя сторона 28 корпуса и поверхность 82 скольжения образуют таким образом, будучи обращены к воде, сплошную и плавно переходящую друг в друга поверхность. В выносных поплавках 30, 40 расположены приводные блоки 100, 110. Приводные блоки 100, 110 включают в себя расположенные в выносных поплавках 30, 40 двигатели. Предпочтительно двигатели выполнены в виде электродвигателей. Электропитание осуществляется при электродвигателях при помощи аккумуляторов, которые соединены в виде аккумуляторных блоков и равным образом расположены в выносных поплавках 30, 40. Двигатели приводят в движение через приводные валы 103 показанные на фиг.3 рабочие винты 102, 112. Рабочие винты 102, 112 расположены внутри проточных каналов 101, 111.
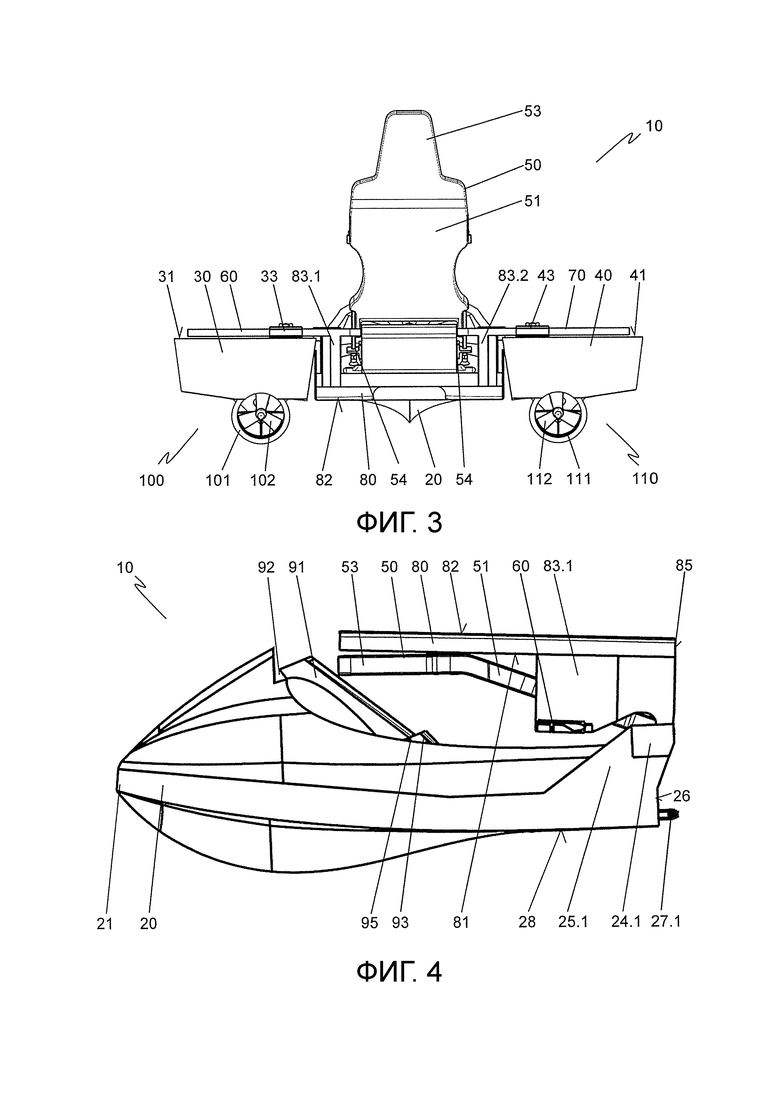
Фиг.3 показывает изображенное на фиг.1 и 2 транспортное средство водного скольжения на виде сзади.
На фиг.1-3 транспортное средство 10 водного скольжения показано в своем разложенном рабочем положении. Выносные поплавки 30, 40 соединены через держатели 60, 70 с корпусом 20. Сиденье 50 откинуто и предоставляет место для одного пассажира. Рулевая колонка 91 находится в своем рабочем положении, так что руль 93 и элементы 94 ручного управления могут использоваться пассажиром. Приведение в движение транспортного средства 10 водного скольжения осуществляется при помощи описанных приводных блоков 100, 110. Для этого рабочие винты 102, 112 приводятся в движение двигателями. Управление транспортным средством 10 водного скольжения осуществляется при помощи руля 93 и расположенных на нем элементов 94 ручного управления. Для этого пассажир может охватывать руками ручки 93.1, 93.2 управления и поворачивать руль 93 на поворотном шарнире 95 относительно рулевой колонки 91. В области поворотного шарнира 95 расположен неизображенный, электронный пропорциональный датчик. Он переставляется благодаря повороту руля 93, вследствие чего управляющий сигнал в виде выходного сигнала пропорционального датчика изменяется. Управляющий сигнал передается далее на равным образом не изображенный блок управления. Блок управления расположен внутри руля 93 или рулевой колонки 91. На руле 93 или альтернативно в пространстве 23 для ног корпуса 20 предусмотрен регулятор скорости для установки скорости транспортного средства 10 водного скольжения. Сигнал скорости в виде выходного сигнала регулятора скорости равным образом подан на блок управления. Блок управления генерирует из управляющего сигнала и сигнала скорости цифровой сигнал управления для управления двигателями. Альтернативно этому может уже пропорциональный датчик быть рассчитан для того, чтобы предоставлять цифровой управляющий сигнал. Цифровой сигнал управления передается через соединения передачи данных на две системы управления двигателями, которые расположены в выносных поплавках 30, 40. Передача данных осуществляется при этом по неизображенным линиям передачи данных или по радиолиниям между блоком управления и системами управления двигателями. Системы управления двигателями имеют электронные регуляторы мощности. Они подключены между аккумуляторными блоками и электродвигателями. При помощи регуляторов мощности мощность двигателей устанавливается в зависимости от сигнала управления. Установка скорости регулятором скорости приводит к одинаковой настройке на двигателях, так что транспортное средство 10 водного скольжения перемещается прямо. Предпочтительно двигатели регулируются при этом в отношении частоты вращения, так что достигается хорошее прямолинейное движение транспортного средства 10 водного скольжения. Управляющий сигнал руля 93 приводит к тому, что один из двигателей эксплуатируется с более высокой мощностью и тем самым частотой вращения, чем другой двигатель. Так, например, при необходимом правом повороте и повороте руля 93 вправо левый двигатель и тем самым левый рабочий винт 102 приводится в движение сильнее, чем правый двигатель с правым рабочим винтом 112. Вследствие этого вызывается изменение направления движения транспортного средства 10 водного скольжения. На какой максимальный уровень устанавливается мощность двигателей вследствие управляющего движения, задано предпочтительно в зависимости от установки скорости регулятором скорости. Так может быть предусмотрено, что при установке скорости на ноль управляющий сигнал руля 93 не приводит к приведению в действие двигателей или приводит к приведению в действие двигателей лишь с малой мощностью. Вследствие этого может предотвращаться то, что транспортное средство 10 водного скольжения, например при посадке пассажира, приводится вследствие непреднамеренного рулевого движения в движение или в сильное движение. При средней установленной скорости транспортного средства 10 водного скольжения может вследствие рулевого движения мощность или частота вращения одного двигателя понижаться, а мощность или частота вращения противоположного двигателя повышаться. Равным образом возможно мощность одного двигателя оставлять неизменной и лишь мощность противоположного двигателя повышать или понижать. При максимальной же установке скорости предусмотрено, что мощность и таким образом частота вращения одного двигателя понижается, в то время как противоположный двигатель по-прежнему работает с максимальной мощностью или частотой вращения. Равным образом возможно обращать направление тяги одного приводного блока 100, 110, в то время как противоположный приводной блок 100, 110 по-прежнему работает в прямом направлении. Благодаря этому управлению приводными блоками создаются условия для движения по узкой кривой.
Пропорциональный датчик может быть выполнен в виде инкрементального датчика, в виде потенциометра или в виде емкостного пропорционального датчика. Он производит аналоговый выходной сигнал, который пропорционален установочному углу руля 93. Такие пропорциональные датчики экономичны и надежны. Одновременно они обладают высокой точностью в связи их выходного сигнала с установочным углом руля 93, так что создаются условия для точного управления транспортным средством 10 водного скольжения. Согласно альтернативному варианту осуществления изобретения может быть также предусмотрено, что пропорциональный датчик в зависимости от своего установочного положения выдает напрямую цифровой сигнал.
При соединении передачи данных между блоком управления и системами управления двигателями при помощи линий передачи данных эти линии разъемно, предпочтительно через штепсельные разъемы, соединены с корпусом 20 и соответственно выносными поплавками 30, 40. Для демонтажа выносных поплавков 30, 40 линии передачи данных могут вследствие этого легко разъединяться. Штепсельные соединения выполнены соответственно водозащищенными. В возможном варианте осуществления изобретения линии передачи данных проложены в держателях 60, 70. При радиосвязи между блоком управления и системами управления двигателями линии передачи данных или сигналов между корпусом 20 и выносными поплавками 30, 40 предпочтительно не требуются, вследствие чего монтаж и демонтаж выносных поплавков 30, 40 дополнительно упрощается.
В показанном примере осуществления блоком управления сигнал управления для управления двигателями генерируется из аналогового управляющего сигнала руля 93 и сигнала скорости регулятора скорости и передается далее на системы управления двигателями. Альтернативно этому также возможно управляющий сигнал и сигнал скорости передавать по отдельности на системы управления двигателями. Они генерируют из этого соответствующий сигнал управления для установки мощности двигателей. Равным образом возможно, что регуляторы мощности расположены в корпусе 20, например будучи интегрированы в блок управления. Однако недостатком при этом является то, что кабели силовой электрической цепи должны прокладываться между выносными поплавками 30, 40 и корпусом 20.
В показанном примере осуществления предусмотрены далее электродвигатели в качестве привода транспортного средства 10 водного скольжения. Установка мощности электродвигателей осуществляется в этом случае предпочтительно предусмотренными в системах управления двигателями регуляторами мощности, в частности подходящими силовыми транзисторами. Они подключены между соединенными в виде аккумуляторных блоков аккумуляторами и электродвигателями, причем в каждом выносном поплавке 30, 40 расположен аккумуляторный блок. Предпочтительно соединение передачи данных между блоком управления и системами управления двигателями выполнено двунаправленным. Далее системы управления двигателями предпочтительно рассчитаны для того, чтобы уровень заряда аккумуляторных блоков регистрировать и передавать на блок управления. Блок управления может затем учитывать уровень заряда аккумуляторных блоков при задании мощностей двигателей. В показанном примере осуществления предусмотрено, что мощность или частота вращения на двигателях ограничивается в зависимости от уровня заряда максимально разряженного аккумуляторного блока. Вследствие этого предотвращается то, что один двигатель работает ввиду различных уровней заряда аккумуляторных блоков с меньшей максимальной мощностью или частотой вращения, чем другой двигатель. Предпочтительно регистрируются в дополнение к уровню заряда аккумуляторных блоков температура двигателей, температура аккумуляторов и/или температура блока управления, и эти данные учитываются при ограничении мощности или частоты вращения двигателей.
Альтернативно электродвигателям могут быть также применены двигатели внутреннего сгорания, которые расположены в выносных поправках 30, 40. Предпочтительно расположены в этом случае приводимые в действие электродвигателем установочные элементы в выносных поправках 30, 40, которые в зависимости от сигнала управления, который выдается блоком управления, устанавливают мощность или частоту вращения двигателей.
Выносные поплавки 30, 40 соединены при помощи держателей 60, 70 с пластиной 80 скольжения. Однако альтернативно этому держатели 60, 70 могут быть также закреплены на корпусе 20. Крепежные устройства 33, 43 и крепежные элементы 62, 72 выполнены таким образом, что выносные поплавки 30, 40 могут просто и быстро отсоединяться от держателей 60, 70 или соединяться с ними. Это делает возможным простой и быстрый монтаж или демонтаж выносных поплавков 30, 40. Далее держатели 60, 70 имеют несколько крепежных гнезд 61, 71. Они позволяют располагать и закреплять выносные поплавки 30, 40 в различных положениях относительно корпуса 20. Вследствие этого ходовые качества транспортного средства 10 водного скольжения могут адаптироваться к соответствующим имеющимся условиям или к желаниям водителя.
Пластина 80 скольжения установлена с возможностью откидывания на корме 21 корпуса 20 и в показанном рабочем положении прилегает своей поверхностью 82 скольжения к поверхности воды. Благодаря пластине 80 скольжения улучшаются свойства скольжения транспортного средства 10 водного скольжения, так что транспортное средство 10 водного скольжения уже при сравнительно низких скоростях переходит с движения вытеснения на движение скольжения. Надувная подушка 11 вызывает в частности при медленном движении или остановке транспортного средства 10 водного скольжения дополнительную плавучесть. Далее надувная подушка 11 приводит к взаимному опиранию спинки 51 сиденья 50 и пластины 80 скольжения, которое приводит к дополнительной стабилизации положений спинки 51 и пластины 80 скольжения, в частности при высоких скоростях транспортного средства 10 водного скольжения. В рабочем положении пластина 80 скольжения, спинка 51 и рулевая колонка 91 застопорены.
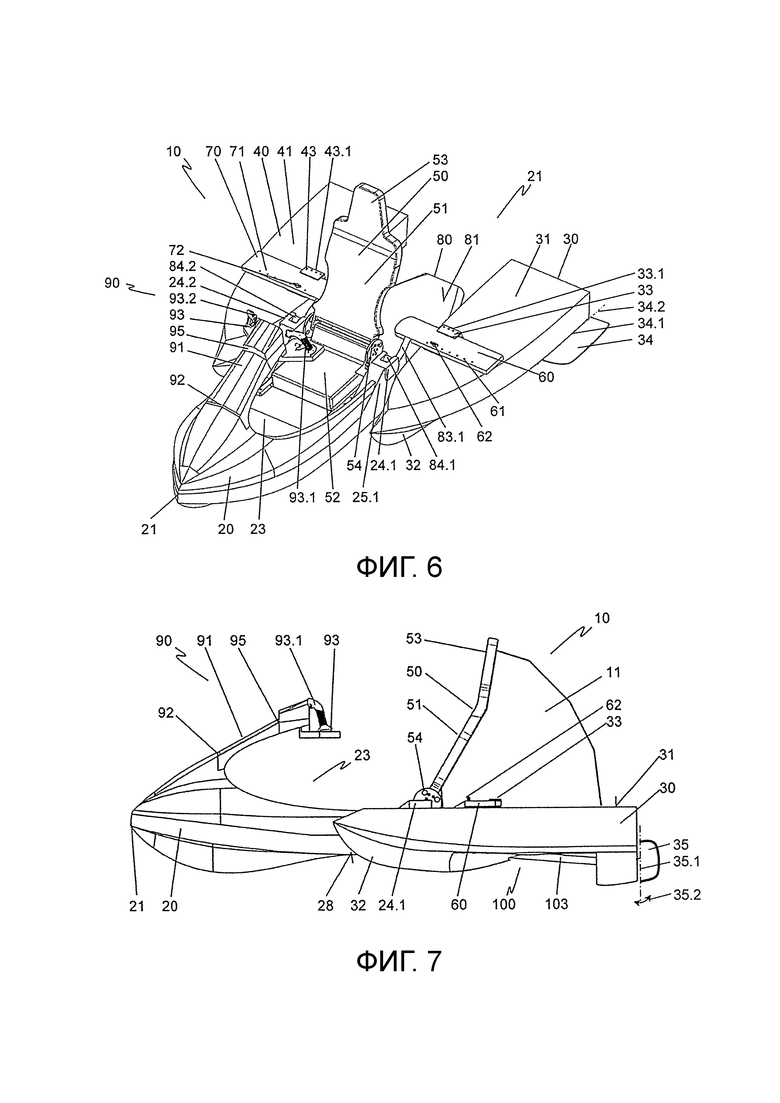
Фиг.4 показывает корпус изображенного на фиг.1, 2 и 3 транспортного средства 10 водного скольжения в положении транспортировки и на виде сбоку, а фиг.5 показывает изображенное на фиг.4 транспортное средство водного скольжения на виде в перспективе сбоку.
Показанные на фиг.1-3 выносные поплавки 30, 40 демонтированы с держателей 60, 70. Рулевая колонка 91 откинута на откидном соединении 92 по направлению к пространству 23 для ног корпуса 20. Руль 93 находится таким образом перед поверхностью 52 сиденья в пространстве 23 для ног корпуса 20. Спинка 51 сиденья 50 откинута на шарнирном соединении 54 согласно показанной на фиг. 5 двунаправленной стрелке 12 по направлению к рулевой колонке 91. Она прилегает своим подголовником 53 к рулевой колонке 91. Пластина 80 скольжения также откинута согласно двунаправленной стрелке 12 в свое положение транспортировки по направлению к носу 21 корпуса 20. Для этого пластина 80 скольжения повернута вокруг шарнирных соединений 84.1, 84.2, которые показаны на фиг.1. Шарнирные соединения 84.1, 84.2 находятся на верхнем конце вертикальных ребер 83.1, 83.2 и на шарнирных опорах 24.1, 24.2, которые расположены на верхнем конце опорных ребер 25.1, 25.2. Благодаря этому расположению пластины 80 скольжения на расстоянии от шарнирных соединений 84.1, 84.2 пластина 80 скольжения может поворачиваться таким образом, что она в показанном положении транспортировки прилегает своей верхней стороной 81 к спинке 51 или подголовнику 53 сложенного сиденья 50. Поверхность 82 скольжения обращена наружу и закрывает сиденье 50, рулевую колонку 91 с рулем 93 и пространство 23 для ног. Вследствие этого они защищены во время транспортировки. Держатели 60, 70 откинуты с пластиной 80 скольжения вперед. Предпочтительно пластина 80 скольжения и спинка 51, а также рулевая колонка 91 застопорены в своих положениях транспортировки.
В своем рабочем положении, которое показано на фиг.1-3, пластина 80 скольжения прилегает упорной поверхностью 85 к опорной поверхности 26 на корме 21 корпуса 20 и удерживается там скобами 27.1, 27.2.
В дальнейшем, неизображенном варианте осуществления изобретения держатели 60, 70 могут быть выполнены далее с возможностью откидывания или вдвигания, так что габаритные размеры корпуса 20 в его положении транспортировки могут дополнительно уменьшаться.
Таким образом, благодаря легко демонтируемым выносным поплавкам 30, 40 и просто разъединяемым соединениям передачи данных между блоком управления и системами управления двигателями транспортное средство 10 водного скольжения может для транспортировки просто разбираться на свои отдельные элементы, а именно на корпус 20 и два выносных поплавка 30, 40. Благодаря откидываемой рулевой колонке 91, откидываемому сиденью 50 и откидываемой пластине 80 скольжения габаритные размеры корпуса 20 могут для транспортировки существенно уменьшаться. Транспортное средство 10 водного скольжения имеется таким образом в переносимых одним человеком узлах, а именно в левом и правом выносном поплавке 30, 40, а также в уменьшенном в своих габаритных размерах корпусе 20.
Монтаж транспортного средства 10 водного скольжения может осуществляться простым образом, например на воде. Для этого пластина 80 скольжения, спинка 51, а также рулевая колонка 91 откидываются в свое рабочее положение и там стопорятся. Затем выносные поплавки 30, 40 соединяются с держателями 60, 70. При этом устанавливаются необходимые положения выносных поплавков 30, 40 относительно корпуса 20. Затем линии передачи данных для передачи сигналов управления вставляются в соответствующие штепсельные разъемы.
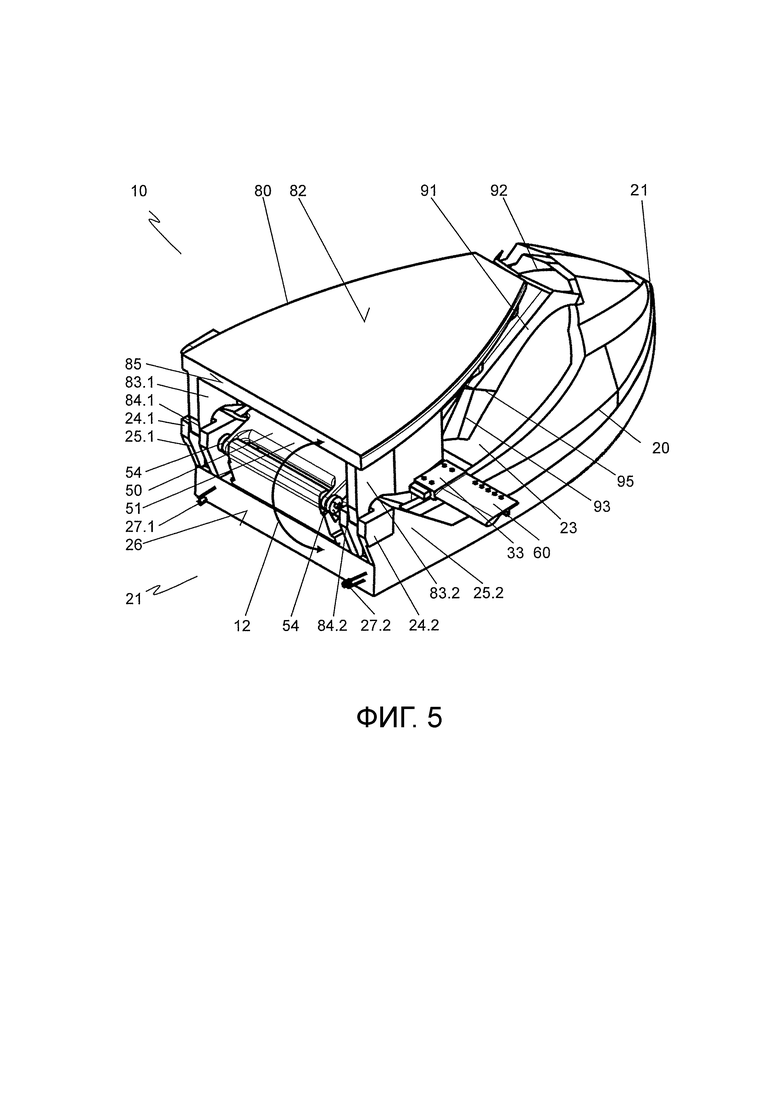
Фиг.6 показывает транспортное средство 10 водного скольжения с фиг.1 с дополнительно установленными рулевыми поверхностями 34, 44. Рулевые поверхности 34, 44 установлены на шарнирах 34.1, 44.1 на левом и правом выносном поплавке 30, 40. Рулевые поверхности 34, 44 представляют собой перемещаемые электромеханически элементы управления, которые могут в своей ориентации перемещаться относительно выносных поплавков 30, 40. Для этого предусмотрены неизображенные, приводимые в действие электромеханически установочные элементы. Они приводятся в действие в зависимости от управляющего сигнала руля 93. При помощи рулевых поверхностей 34, 44 маневренность транспортного средства 10 водного скольжения может дополнительно улучшаться.
Фиг.7 показывает транспортное средство 10 водного скольжения с фиг.2 с дополнительно установленными кормилами 35, 45. Фиг.8 показывает транспортное средство 10 водного скольжения с фиг.3 с дополнительно установленными рулевыми поверхностями 34, 44 и кормилами 35, 45.
Как в частности можно увидеть на фиг.8, кормила 35, 45 расположены в продлении проточных каналов 101, 111. Они находятся таким образом непосредственно в области потока вытолкнутой рабочими винтами 102, 112 воды. Кормила 35, 45 могут неизображенными, приводимыми в действие электромеханически элементами управления поворачиваться при манипулировании рулем 93 в соответствии с показанными двунаправленными стрелками 35.2, 45.2 вокруг соответствующих осей 35.1, 45.1 кормил. Одновременно могут рулевые поверхности 34, 44 поворачиваться вокруг своих образованных шарнирами 34.1, 44.1 осей 34.2, 44.2 поворота. Благодаря кормилам 35, 45 и рулевым поверхностям 34, 44 управляемость транспортного средства 10 водного скольжения может улучшаться по сравнению с управлением исключительно приводными блоками 100, 110.
Фиг.9 показывает сопловую систему 120 для транспортного средства 10 водного скольжения. Сопловая система 120 образована из выходного сопла 121 и соединенного с ним шарнирным соединением 123 управляющего сопла 124. По бокам в области шарнирного соединения 123 размещены точки 122 соединения на управляющем сопле 124.
Сопловая система 120 является частью реактивного привода, который может быть предусмотрен в качестве альтернативы показанным приводным блокам 100, 110. При этом в каждом случае один реактивный привод расположен в выносном поплавке 30, 40. При таком реактивном приводе, в проточном канале расположен приводимый в движение двигателем рабочий винт в виде крыльчатки. Крыльчатка засасывает воду впускным отверстием для воды и вбрасывает ее через показанную сопловую систему 120 по направлению к корме 21 транспортного средства 10 водного скольжения. Посредством полученного при этом реактивного действия транспортное средство 10 водного скольжения приводится в движение. Для улучшения управляемости транспортного средства 10 водного скольжения ориентация управляющего сопла 124 и тем самым направление выброса струи воды может изменяться. Это осуществляется в зависимости от управляющего сигнала пропорционального датчика неизображенными, приводимыми в действие электромеханически установочными элементами, которые соединены с точками 122 соединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ АВТОЖИР | 2013 |
|
RU2543471C2 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |
| АМФИБИЯ-ТРАНСФОРМЕР "АКВА" | 2010 |
|
RU2448844C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2636249C2 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО | 2008 |
|
RU2399539C2 |
| УПРАВЛЕНИЕ ПРЕИМУЩЕСТВЕННО РУЛЕВОГО ТИПА | 2004 |
|
RU2278796C2 |
| ПРОМЫШЛЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2397885C2 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Высокоманёвренное транспортное средство для стрельбы по целям световыми лучами | 2019 |
|
RU2724624C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
Изобретение относится к области судостроения, в частности к транспортному средству водного скольжения, включающему в себя корпус, по меньшей мере одно сиденье и два расположенных по бокам от корпуса и опосредованно или непосредственно соединенных с корпусом выносных поплавка, причем с каждым выносным поплавком согласован управляемый отдельно в отношении своей приводной мощности приводной блок в каждом случае по меньшей мере с одним приводимым в движение двигателем, в частности электродвигателем, рабочим винтом. При этом предусмотрено, что руль транспортного средства водного скольжения соединен с пропорциональным датчиком и что управляющий сигнал пропорционального датчика подан на блок управления, который опосредованно или непосредственно управляет двигателями в зависимости от управляющего сигнала пропорционального датчика. Таким образом, предоставляется точно управляемое и при этом легко разборное транспортное средство водного скольжения. 12 з.п. ф-лы, 9 ил. 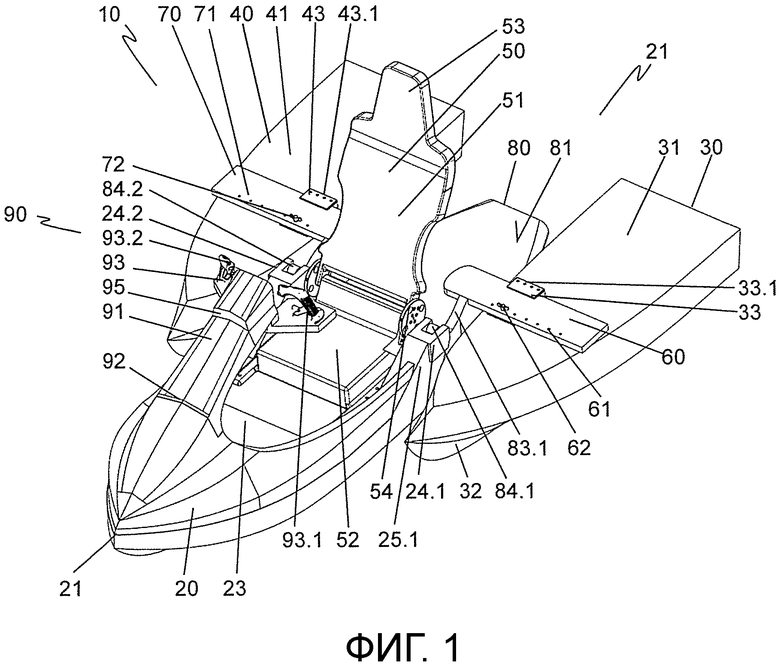
1. Транспортное средство (10) водного скольжения, включающее в себя корпус (20), по меньшей мере одно сиденье (50) и два расположенных по бокам от корпуса (20) и опосредованно или непосредственно соединенных с корпусом (20) выносных поплавка (30, 40), причем с каждым выносным поплавком (30, 40) согласован управляемый отдельно в отношении своей приводной мощности приводной блок (100, 110) в каждом случае по меньшей мере с одним приводимым в движение двигателем, в частности электродвигателем, рабочим винтом (102, 112),
отличающееся тем, что
руль (93) транспортного средства (10) водного скольжения соединен с пропорциональным датчиком и что управляющий сигнал пропорционального датчика подан на блок управления, который опосредованно или непосредственно управляет двигателями в зависимости от управляющего сигнала пропорционального датчика,
причем в каждом случае система управления двигателем с регулятором мощности расположена в выносных поплавках и соединена с блоком управления и причем системы управления двигателями регулируют мощность согласованного в каждом случае двигателя в зависимости от управляющего сигнала пропорционального датчика, причем аккумуляторы для электропитания двигателей расположены в выносных поплавках, и
причем блок управления преобразовывает аналоговый управляющий сигнал пропорционального датчика по меньшей мере в один цифровой управляющий сигнал, и/или пропорциональный датчик выдает цифровой управляющий сигнал, и причем цифровой управляющий сигнал подан через соединения передачи данных на расположенные в или на выносных поплавках системы управления двигателями, которые в зависимости от цифрового управляющего сигнала регулируют мощность согласованного в каждом случае двигателя.
2. Транспортное средство (10) водного скольжения по п.1, отличающееся тем, что на блок управления подан сигнал скорости регулятора скорости транспортного средства (10) водного скольжения и что сигнал скорости учтен при происходящем в зависимости от управляющего сигнала пропорционального датчика управлении двигателями.
3. Транспортное средство (10) водного скольжения по п.2, отличающееся тем, что блок управления генерирует из управляющего сигнала пропорционального датчика и сигнала скорости регулятора скорости по меньшей мере один цифровой сигнал управления и подает его на системы управления двигателями и/или что блок управления генерирует из сигнала скорости регулятора скорости цифровой сигнал скорости и подает его на системы управления двигателями.
4. Транспортное средство (10) водного скольжения по любому из пп.1-3, отличающееся тем, что пропорциональный датчик выполнен в виде инкрементального датчика, или потенциометра, или емкостного пропорционального датчика.
5. Транспортное средство (10) водного скольжения по любому из пп.1-4, отличающееся тем, что соединение передачи данных между блоком управления и системами управления двигателями осуществляется при помощи линий передачи данных или радиолиний.
6. Транспортное средство (10) водного скольжения по любому из пп.1-5, отличающееся тем, что соединение передачи данных выполнено двунаправленным.
7. Транспортное средство (10) водного скольжения по любому из пп.1-6, отличающееся тем, что с каждым двигателем согласован аккумуляторный блок из соединенных аккумуляторов, причем уровень заряда аккумуляторных блоков регистрируется и подается через соединение передачи данных на блок управления и причем блок управления рассчитан для того, чтобы для обоих двигателей одинаково ограничивать максимально устанавливаемую мощность двигателей в зависимости от уровня заряда максимально разряженного аккумуляторного блока.
8. Транспортное средство (10) водного скольжения по п.7, отличающееся тем, что температура двигателей, и/или температура аккумуляторов, и/или температура блока управления регистрируется и учитывается при ограничении максимально устанавливаемой мощности двигателей.
9. Транспортное средство (10) водного скольжения по любому из пп.5-8, отличающееся тем, что выносные поплавки (30, 40) разъемно соединены с корпусом (20) и/или что линии передачи данных между блоком управления и системами управления двигателями выполнены разъемными, в частности со штепсельными разъемами.
10. Транспортное средство (10) водного скольжения по любому из пп.1-9, отличающееся тем, что рулевая колонка (91), которая удерживает руль (93), соединена с возможностью откидывания с корпусом (20).
11. Транспортное средство (10) водного скольжения по любому из пп.1-10, отличающееся тем, что на выносных поплавках в каждом случае расположены один или несколько приводимых в действие электродвигателем элементов управления и что эти приводимые в действие электродвигателем элементы управления выполнены с возможностью управления в зависимости от управляющего сигнала, и/или сигнала скорости, и/или по меньшей мере одного цифрового сигнала управления, образованного из аналогового управляющего сигнала и сигнала скорости.
12. Транспортное средство (10) водного скольжения по п.11, отличающееся тем, что в качестве приводимых в действие электродвигателем элементов управления на выносных поплавках могут приводиться в действие установленные с возможностью поворота рулевые поверхности (34, 44), и/или кормила, и/или расположенные с возможностью поворота управляющие сопла (124), и/или расположенные с возможностью поворота гондолы с рабочими винтами.
13. Транспортное средство (10) водного скольжения по любому из пп.1-12, отличающееся тем, что направление тяги приводных блоков (100, 110) может обращаться.
| US 2002023579 A1, 28.02.2002 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ПАНЕЛИ ДИСПЛЕЯ | 2009 |
|
RU2467364C2 |
| WO 2014047639 A2, 27.03.2014 | |||
| US 6132267 A, 17.10.2000 | |||
| СПОСОБ ВЫРАБОТКИ ХЛЕБНОГО КВАСА | 2015 |
|
RU2585363C1 |
| ПОДВОДНО-НАДВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПРОНИЦАЕМОГО ТИПА | 2000 |
|
RU2191135C2 |

