Изобретение относится к транспортному машиностроению и может быть использовано при производстве транспортных средств, а именно к устройствам преимущественно рулевого типа.
Известно устройство, цель которого частично совпадает с предлагаемым изобретением, а именно повышение удобства управления и безопасности движения путем автоматического изменения положения водителя в зависимости от скорости транспортного средства А.С. №1662891, кл. В 62 D 33/06, пульт управления которого расположен в кабине, на полу которой установлена платформа с сиденьем и органами управления. Платформа имеет возможность поворачиваться относительно оси, перпендикулярной продольной оси транспортного средства, в зависимости от скорости транспортного средства от сигнала, поступающего от датчика, от него управляется механизм регулирования высоты рулевой колонки. Рулевая колонка выполнена с механизмом регулирования ее высоты, управляемым от упомянутого датчика скорости транспортного средства. Рулевая колонка установлена под углом, обеспечивающим оптимальные углы наклона рулевого колеса для каждого конкретного положения сиденья оператора. В данном изобретении меняется положение оператора и высота рулевой колонки, плоскость же рулевого колеса относительно колонки не меняет угол наклона.
Рулевое колесо механического транспортного средства в большинстве случаев несет на себе не только функцию передачи управляющего воздействия от человека к изменяющим направления элементам (колесам, закрылкам, элеронам и т.п.), но и информационные функции:
а) Визуальную - по положению спиц рулевого колеса и его ободу. При небольшом его отклонении от нейтрального положения можно судить о том, в какую сторону и на какой угол повернуто рулевое колесо, а значит можно определить в какую сторону при движении будет поворачиваться транспортное средство;
б) Осязательную, противодействия - при повороте рулевого колеса от нейтрального положения, оно будет оказывать силу противодействия, ощущая которую органами чувств, можно судить о направлении и величине, на которую повернуты изменяющие направления движения элементы транспортного средства.
В обычных условиях движения перечисленные выше информационные функции рулевого колеса обеспечивают достаточно полную "связь" водителя с дорожной обстановкой. Эта "кажущаяся" функциональная достаточность рулевого управления мгновенно разрушается при ухудшении дорожной обстановки. Под ухудшением понимается такое изменение дорожного покрытия или любых других факторов, влияющих на то, что водитель не может полноценно использовать визуальную (а) и осязательную противодействия (б) функцию, например, для автомобилей это аварийная ситуация на дороге (потеря управления транспортным средством на высокой скорости из-за потери сцепления колес с дорожным покрытием: гололед, глубокая колея, болотистая почва, песок, глубокий снег и т.п. Сама по себе аварийная ситуация, например потеря управления транспортным средством на высокой скорости из-за потери сцепления колес, требует предельной концентрации внимания на дорожной обстановке и судить о положении колес приходится, используя органы осязания (на "ощупь"). При этом зачастую из-за потери сцепления колес с дорожным покрытием осязательная противодействия функция (б) рулевого колеса пропадает. Отвлекать же свое внимание на определение положения колес, используя для этого визуальную (а) функцию нельзя, т.к. за эти доли секунд или секунды можно потерять контроль за дорожной обстановкой и создать аварийную ситуацию. Кроме всего выше перечисленного, в настоящее время большинство машин оснащается гидравлическими или электрическими усилителями рулевого управления, что тоже снижает осязательную функцию рулевого управления.
Кроме всего выше перечисленного бывают ситуации, когда рулевое управление транспортного средства изначально или в силу конструктивных недостатков, а также из-за последствий ремонта, аварий и тому подобное просто не имеет одну из перечисленных выше функций, например (на примере автомобиля):
- спицы рулевого колеса расположены часто и через равные интервалы, таким образом нет функции (а) (Вы находитесь в неподвижном автомобиле, колеса которого повернуты относительно нейтрального положения);
- в результате проведенного ремонта автомобиля пропал кастор (вертикальный угол установки колес по направлению движения), т.о. нет функции (б).
Кроме того, есть также рулевые управления транспортными средствами (в особенности виртуальными), которые могут вообще не иметь ни одной из перечисленных выше функций.
Коснемся вопроса управления объектами, находящимися на таком удалении от оператора транспортного средства, что появляются значительные временные задержки между подачей сигнала управляющего воздействия к объекту и возвратом обратно к оператору сигнала об отработанном объектом управляющем воздействии. В данном случае предлагаемое рулевое управление поможет снять психологическое напряжение, возникающее при управлении таким объектом. Это произойдет потому, что уменьшится в два раза время задержки реакции объекта на управляющее воздействие. Допустим, что задержка распространения сигнала в пространстве при прохождении его от операторов до управляемого объекта и обратно составляет 4 секунды. Тогда если оператор повернет руль, то можно учесть задержку сигнала при прохождении его до объекта и только спустя 2 секунды повернуть плоскость вращения руля, сообщив таким образом оператору, что управляемый объект "отработал" заданное ему управляющее воздействие. Еще через 2 секунды оператор уже сможет визуально на мониторе наблюдать, как объект исполняет его команды. Например, таким образом можно управлять космическими объектами, находящимися на значительном удалении от земли непрерывно, а не в "пошаговом" режиме.
Кроме того, используя данное изобретение, можно вдвое увеличить дальность управления беспилотными аппаратами, требующими ручное управление, например военными объектами (транспортными средствами и аппаратами - спутниками, ракетами, самолетами, подводными аппаратами и т.п.). Такие объекты в силу специфики их применения и больших скоростей перемещения в пространстве требуют мгновенной реакции оператора на окружающую обстановку и задержки сигналов в доли секунд могут привести к неспособности выполнять поставленные задачи.
Точно также, как описано выше, можно управлять транспортными средствами, в том числе и виртуальными, имеющими инерционные управляющие направлением движения объекта управляемые объекты, например рули океанического лайнера.
Начнем с кораблей. Данное изобретение в силу своей специфики наиболее применимо к скоростным моторным судам, так как его преимущества в полной мере будут востребованы именно там, в силу того что, как уже подчеркивалось, необходимость изобретения в основном обусловлена "разгрузкой" органов зрения от процесса определения положения управляющих направлением движения транспортного средства объектов (в данном случае "рулевой плоскости"). Зачем "перенапрягать" руки силой противодействия при интенсивном рулении, когда можно при наличии усилителя рулевого управления с легкостью вращать рулевое колесо и при этом руками в полной мере ощущать величину и знак приложенного к рулю управляющего воздействия? Причем это верно как в динамике, так и в статике движения транспортного средства или объекта.
Необходимость в нем также может возникнуть на судне с двухвинтовой схемой. Так при отказе одного из гребных винтов возникает постоянный момент, отклоняющий судно от прямолинейного движения. То же самое может возникнуть при сильном боковом ветре и т.п. В таком случае данное изобретение позволяет компенсировать рулевой плоскостью возникающий при этом момент, разворачивающий судно от прямолинейного движения. Руль, естественно, при этом будет смещен от своего нейтрального положения, соответствующего прямолинейному движению судна, но мы также можем скорректировать и угол поворота плоскости вращения рулевого колеса. Таким образом, мы можем преобразовать многооборотное рулевое колесо корабля, не имеющего четкого нейтрального положения, в "комфортное" рулевое управление, сравнимое по удобству с автомобильным. При этом будет обеспечена феноменальная техническая простота реализации данной возможности. Ну и естественно даже при отказе всей электроники и усилителя рулевого управления рулевое колесо, будучи соединенным с "рулевой плоскостью" через редуктор, позволит полноценно управлять судном, что выгодно его отличает от других органов управления, сравнимых с ним по удобству и функциональности при наличии у них усилителя (таких, например, как "джойстик").
Теперь о самолетах. Наиболее применимо данное изобретение на небольших сверхлегких летательных аппаратах (СЛА). Применяемый там "штурвал" не является рулевым колесом в полной мере, так как он не многооборотный, а значит, он имеет малое передаточное число редуктора, что, в свою очередь, влечет за собой "тяжесть" управления. Но такая конструкция оправдана тем, что позволяет органами чувств получать информацию о величине приложенного пилотом к "штурвалу" управляющего воздействия. То есть штурвал эквивалентен, в какой-то мере, рулевому колесу, описанному в данном изобретении. Также, как и на водных судах, прямолинейнее движение СЛА может быть изменено постоянным боковым ветром или отказом одного из двигателей или любыми другими причинами. Поэтому применение данного изобретения поможет, во-первых, сделать возможным применение рулевого колеса для управления летательными аппаратами, а во-вторых обеспечит комфортное управление летательным аппаратом при применении усилителя рулевого управления, обеспечивая возможность "компенсации" внешних воздействий и "нулевое" противодействие прикладываемому пилотом управляющему воздействию. Под "компенсацией" понимается смещение взаимного положения "нулевых" углов "вращения" и "поворота" плоскости вращения рулевого колеса. Под "нулевым" противодействием понимается применение усилителя рулевого управления, не обеспечивающего силу противодействия относительно прикладываемого к нему управляющего воздействия и не передающего таким образом еще и внешние воздействия. Ну и самое важное - заметно упроститься управление летательным аппаратом в случае отказа усилителя рулевого управления, так как будет применяться "многооборотный" редуктор. Кроме того, начиная с некоторой массы самолета применение штурвала с прямой механической связью с управляющими полетом плоскостями теряет всякий смысл. Данное же изобретение позволит повысить данный порог, что сделает многие малые многоместные самолеты более безопасными в случае возникновения на них аварийных ситуаций в полете, связанных с отказом усилителей управления.
Цель изобретения - наполнение рулевого управления информационными функциями, которые помогают обеспечить пространственную временную и осязательную связь водителя с управляемым им реальным или виртуальным объектом при помощи органов чувств человека. При этом от "усилителя" рулевого управления не требуется обязательно обеспечивать функции, такие как обеспечение обратной связи от управляемого объекта к водителю, или "безинерционность".
Обратная связь, в данном случае это передаваемое на руки водителя, держащего в руках орган управления транспортным средством, воздействие, например, вызванное внешней средой и действующее на управляющие движением объекта колеса, рулевые плоскости и другие взаимосвязанные с органом управления объекты.
Объект - любое транспортное или иное виртуальное или реальное движущееся в пространстве (виртуальном или реальном) средство, направление движения которого управляется человеком.
Управляемый объект - управляющие направлением движения объекта элементы, такие как колеса (в автомобилестроении), рулевые плоскости (на водном транспорте), элероны и закрылки (в авиации) и другие взаимосвязанные с органом управления объекты.
Применительно к автомобильной технике получается, что водитель, управляя меняющими направление движения колесами, как бы непосредственно держится руками за это колесо, в полной мере ощущая, каким образом он управляет автомобилем.
Применительно, например, к водным транспортным средствам, оснащенным аналогом рулевого управления, применяемого для отклонения от нейтрального положения подвесного мотора или рулевой плоскости для осуществления маневрирования, то водитель опять же, держа в руках предлагаемое в заявке рулевое колесо, ощущает, на какой угол он повернул рулевую плоскость или подвесной мотор. При этом удобство управления повысится, так как само управление может быть инерционным и даже оснащаться мощным усилителем рулевого управления, не обеспечивающим "реактивную" обратную связь рулевого управления.
Поставленная задача решается следующим образом. Рассмотрим пример предлагаемой системы на автомобильном транспорте.
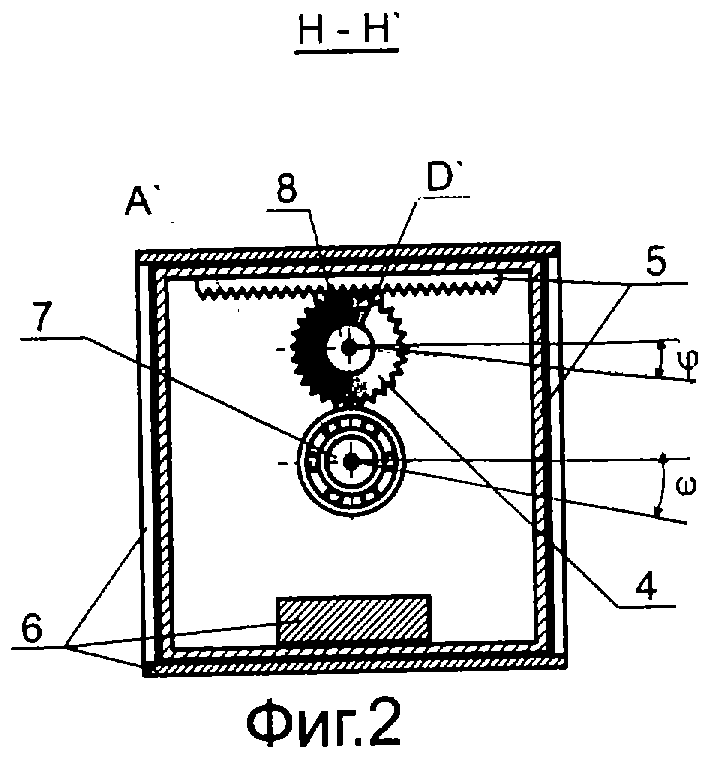
На фиг.1 и 2 приведена общая схема предлагаемой системы рулевого управления колесной машины, где обозначены:
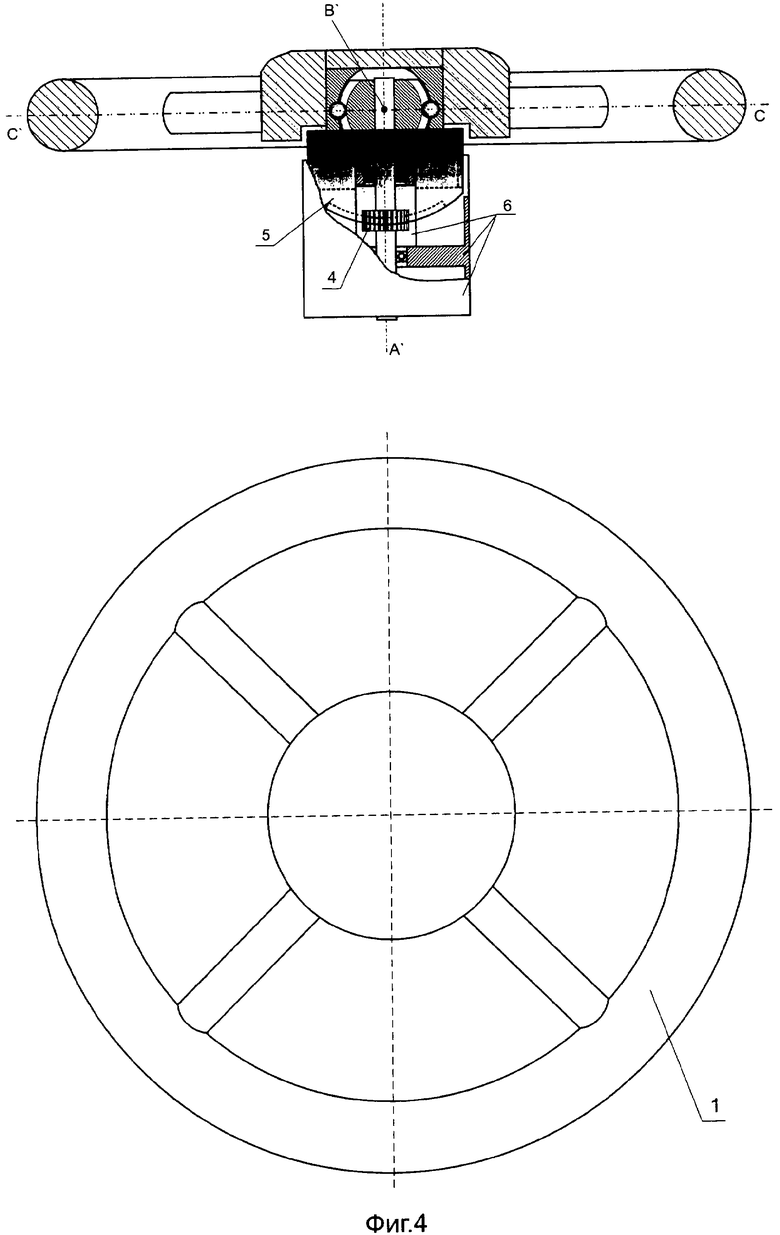
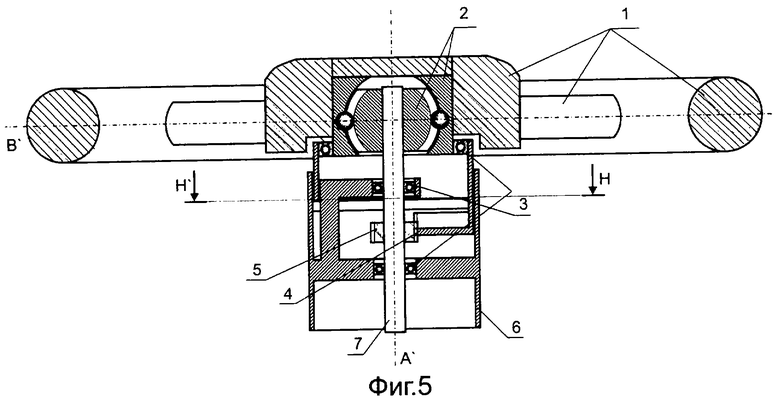
1 - рулевое колесо (его основные элементы - обод, спица, ступица);
2 - шарнир равноугловых скоростей;
3 - подшипники качения;
4 - корпус поворотного механизма, совмещенный с зубчатой рейкой, входящей в зацепление с шестерней 5;
5 - шестерня поворотного механизма;
6 - корпус поворотного механизма;
7 - вал рулевого управления;
8 - вал привода исполнительного механизма;
9 - исполнительный механизм;
10 - датчик угла поворота оси вращения рулевого колеса;
11 - микропроцессорный блок управления;
А' - ось вращения вала рулевого управления;
D' - ось вращения вала "исполнительного" механизма;
В' - ось поворота плоскости вращения рулевого колеса;
С-С' - плоскость вращения рулевого колеса.
Для этого дополнительно устанавливается датчик угла поворота рулевого колеса относительно его нейтрального положения (10). Руль крепится к рулевой колонке через шарнир равноугловых скоростей (2), установленный на вал рулевого управления (7), зафиксированный в корпусе рулевого управления подшипниками качения (3). Корпус рулевого управления (6) позволяет перемещаться корпусу поворотного механизма (5), приводимому в движение шестерней (4), и обеспечивает его зацепление с шестерней, но предотвращает его вращение вместе с рулевым колесом. Перемещение корпуса поворотного механизма в пространстве обеспечивает для рулевого колеса вторую степень свободы, а именно поворот плоскости вращения рулевого колеса (С-С') относительно единственной оси вращения плоскости (В').
α - угол поворота плоскости вращения рулевого колеса (С-С') при его отклонении от нейтрального положения.
d - диаметр шестерни поворотного механизма;
r - радиус окружности, описываемой зубчатой рейкой поворотного механизма относительно его оси поворота;
ω - угол поворота вокруг своей оси рулевого колеса.
Рассмотрим, как работает данная конструкция. Найдем математическую функцию, реализующую зависимость угла α (см. фиг.3) поворота плоскости вращения рулевого колеса от угла ω поворота вокруг своей оси рулевого колеса относительно своего "нейтрального" положения (см. фиг.4): Так как в данной конструкции шестерня (4) и рейка находятся в постоянном зацеплении, то при повороте рулевого колеса длина углового сектора S1, описанного шестерней по ее окружности будет равна длине углового сектора S2, описанного рейкой, т.е.

где 

π - константа Пи, равная 3.14
Подставив в (1) выражения (2) и (3), получим, что

где k=d/(2·r)
Рассматривая выражение (4), можно увидеть, что оно представляет из себя линейную функцию от одного аргумента, т.е. наиболее простой вариант, описанный выше. Рассмотрим конкретные примеры.
ПРИМЕР 1. Для начала рассмотрим конструкцию рулевого управления с "жестким" (механическим) управлением изменения положения в пространстве плоскости вращения рулевого колеса (см. фиг.5 и фиг.6).
Пусть, радиус окружности, описываемой зубчатой рейкой поворотного механизма r=15 см. (см. фиг.3), относительно оси поворота, а диаметр шестерни d=4 см, а рулевое колесо со стороны водителя повернется вокруг своей оси по часовой стрелке на угол ω=90°, тогда согласно приведенной выше формуле (4) угол поворота плоскости вращения рулевого колеса составит

ПРИМЕР 2. Рассмотрим вариант, когда исполнительным механизмом 9 (см. фиг.1 и фиг.2) служит электродвигатель с редуктором, которым управляет микропроцессорный блок 11, обрабатывающий входной сигнал, поступающий с датчика угла поворота ω оси вращения рулевого колеса 10 (фиг.1), установленного на валу рулевого колеса, и преобразуется в угол ϕ поворота оси 8 (фиг.2) исполнительного механизма 9 (фиг.1).
Пусть зависимость ϕ от ω определяется микропроцессорным блоком и отрабатывается исполнительным механизмом как следующее выражение:

Так как поворотный механизм имеет те же геометрические размеры (см. фиг.3), то для определения угла α мы используем полученное нами выше выражение (4)

Подставив в (6) выражение (5), получим, что

Если r=15 см, а d=4 см, а со стороны водителя рулевое колесо повернулось на угол ω=90° по часовой стрелке, тогда согласно приведенной выше формуле (7), угол поворота плоскости вращения рулевого колеса α (см. фиг.2) составит
α=(d/(4·r))·ω=(4/(4·15))·90°=6°
Особо отметим, что в этом варианте функция α=f(ω), где ω - аргумент, может представлять из себя функцию не одного аргумента, как приведено в примерах выше, а нескольких, например сколь угодно сложную функцию, зависящую от любого числа аргументов (α=f(ω, β, μ,...)). Ее реализуют с помощью исполнительного механизма, например, в виде малоинерционного двигателя с редуктором, которым управляет микропроцессорный блок, обрабатывающий любые входные сигналы (скорость, гироскопические датчики, датчики ABS и т.п.), поступающие от любого объекта, даже виртуального в реальном времени.


Изобретение относится к транспортному машиностроению и может быть использовано при производстве транспортных средств, а именно к устройствам преимущественно рулевого типа. Орган управления преимущественно для управления реальными или виртуальными объектами имеет реальную или мнимую ось вращения и как минимум еще одну дополнительную степень свободы, но как минимум одним из аргументов функциональной зависимости движения по меньшей мере одной дополнительной степени свободы органа управления является угол собственного вращения органа управления или функция, как минимум одним из аргументов которой является угол собственного вращения органа управления. Технический результат заключается в расширении функциональных возможностей. 6 ил.
Орган управления преимущественно для управления реальными или виртуальными объектами, имеющий реальную или мнимую ось вращения, отличающийся тем, что имеет как минимум еще одну дополнительную степень свободы, но как минимум одним из аргументов функциональной зависимости движения по меньшей мере одной дополнительной степени свободы органа управления является угол собственного вращения органа управления или функция, как минимум одним из аргументов которой является угол собственного вращения органа управления.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| МОТОСКЕЙТБОРД | 1992 |
|
RU2067482C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |

