Предлагаемое изобретение относится к перемещению цепных конвейеров по расположенному в трех измерениях изогнутому пути с помощью привода для сообщения вращательного движения с цепной передачей.
Предшествующий уровень техники
Наиболее близким к заявляемому изобретению патент РФ на изобретение №2225338, «Гибкая конвейерная лента, климатическая камера, содержащая подобную ленту, и способ обработки продуктов в этой камере», МПК B65G 21/18, F25D 3/10, F25D 13/06. Изобретение предназначено для обработки пищевых продуктов, перемещаемых на конвейерной ленте в климатической камере. Гибкая конвейерная лента выполнена в виде бесконечной петли. Часть ее образует множество слоев, наложенных один на другой. Лента собрана из взаимно смещаемых звеньев. Каждое из них содержит по меньшей мере два поперечных стержня и расположенные у каждой кромки ленты опорные элементы. Последние выступают вверх от плоскости ленты и выполнены с возможностью поддерживать вышележащий слой ленты. Звенья соединены друг с другом с возможностью взаимного смещения вдоль по меньшей мере одной боковой кромки ленты. Опорные элементы соединены с концами поперечных стержней ленты или образуют их продолжение. Они включают в себя опорную часть в форме скобы. Последняя выступает вверх от плоскости ленты и соединяет между собой стержни соответствующего звена ленты. Климатическая камера для обработки продуктов посредством циркулирующего вокруг них газа содержит описанную конвейерную ленту.
Недостатком данного технического решения является то, что направляющие выполнены в виде роликов, что ограничивает использование конвейерной цепи и не позволяет оптимально использовать занимаемое пространство.
Задачей предлагаемого изобретения является создание устройства для перемещения бесконечных конвейерных цепей с плавным равномерным движением в разных плоскостях без использования направляющих звездочек с максимальным использованием полезных площадей.
Поставленная задача решается за счет того, что устройство для перемещения бесконечных конвейерных цепей включает конвейерные цепи, выполненные в виде звеньев; направляющие; как минимум один двигатель и как минимум один привод с приводной звездочкой. Каждая конвейерная цепь выполнена в виде соединенных между собой звеньев, где расчетное количество соединений звеньев снабжены роликами, штыри которых выполнены удлиненными с одной стороны. Направляющая выполнена в виде жесткого С-образного в сечении профиля, плотно охватывающего конвейерную цепь и расположенного таким образом, что удлиненные части штырей роликов выступают из проема С-образного профиля. Изгибы направляющей могут быть выполнены в разных плоскостях, а сами направляющие всегда выполнены одинаковыми по форме и расположены зеркально по отношению друг к другу таким образом, что удлиненные части штырей роликов каждой направляющей направлены друг к другу и синхронизированы относительно друг друга. Каждая направляющая выполнена с разрывом для установки привода. Привод выполнен в виде приводного цепного механизма, который закреплен на основании и выполнен в виде двух не связанных между собой цепных передач. Цепные передачи расположены параллельно друг другу и двигаются в разных направлениях относительно друг друга. Цепные передачи приводят в движение посредством как минимум двух приводных звездочек, входящих в зацепление со своей парой, и звездочек цепных передач. Внутренняя часть каждой цепной передачи ограничена П-образным в сечении коробом, закрепленным на основании и развернутым своей открытой частью внутрь. Внешняя часть каждой цепной передачи снабжена как минимум одним натяжителем цепи. Цепь каждой цепной передачи снабжена расчетным количеством захватов, расположенных на одинаковом расстоянии друг от друга. Каждый захват одной цепи синхронизирован относительно каждого захвата второй цепи, а расстояние между захватами равно расстоянию между роликами конвейерной цепи. Захваты выполнены с возможностью двустороннего захвата и перемещения роликов. Приводных звездочек в приводном цепном механизме может быть четыре. Захваты выполнены в виде одностороннего либо двустороннего толкающего ролик элемента. Приводной цепной механизм можно установить на любом прямом участке бесконечной конвейерной цепи. На устройство можно установить несколько приводных цепных механизмов на любых прямых участках бесконечной конвейерной цепи. При установке нескольких приводных цепных механизмов только один из множества приводных цепных механизмов может содержать двигатель, при этом два цепных механизма, один из которых содержит двигатель, установлены параллельно и объединены передающим движение валом, соединяющим одну из звездочек одной из цепных передач со звездочкой параллельной цепной передачи параллельного цепного механизма, передающего движение, а остальные цепные механизмы объединены с цепными механизмами, содержащими вал, посредством приводных цепей. Расчетное количество соединений звеньев конвейерной цепи могут быть снабжены дополнительными роликами с внешней стороны цепи. Количество роликов для звеньев конвейерной цепи рассчитывают в соответствии с предполагаемой нагрузкой.
Сущность предлагаемого изобретения поясняется чертежами
где:
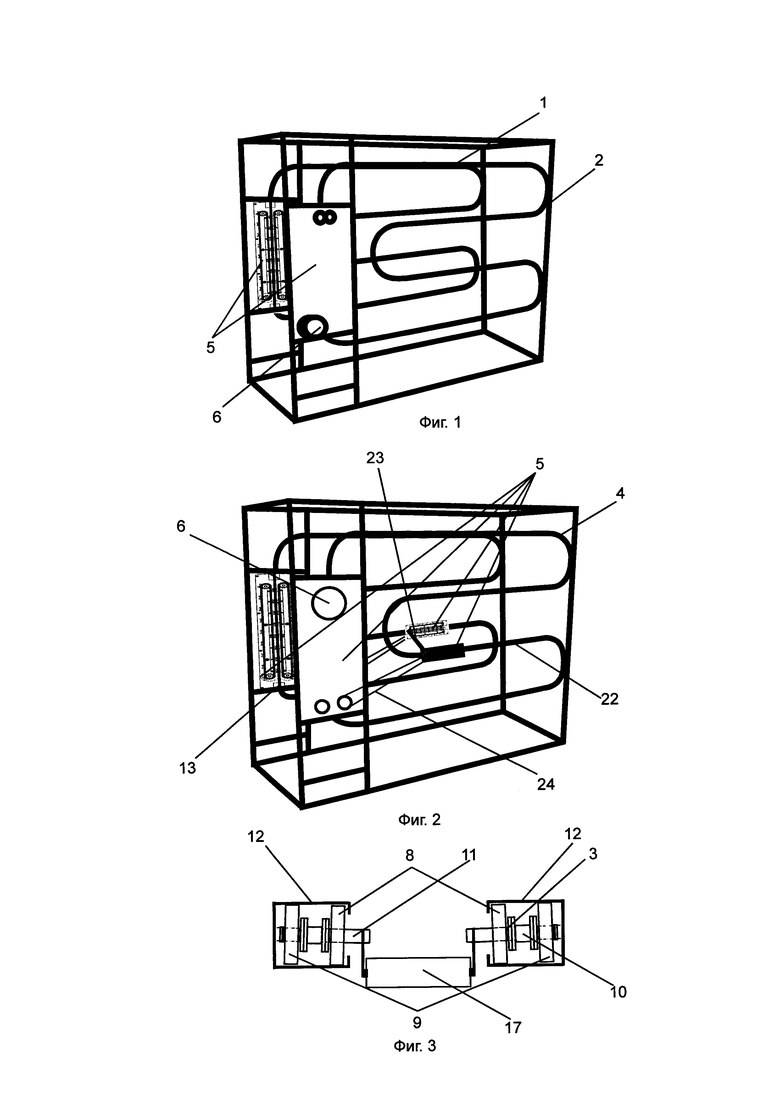
На фиг. 1. - Вид устройства для перемещения бесконечных конвейерных цепей с двумя приводами.
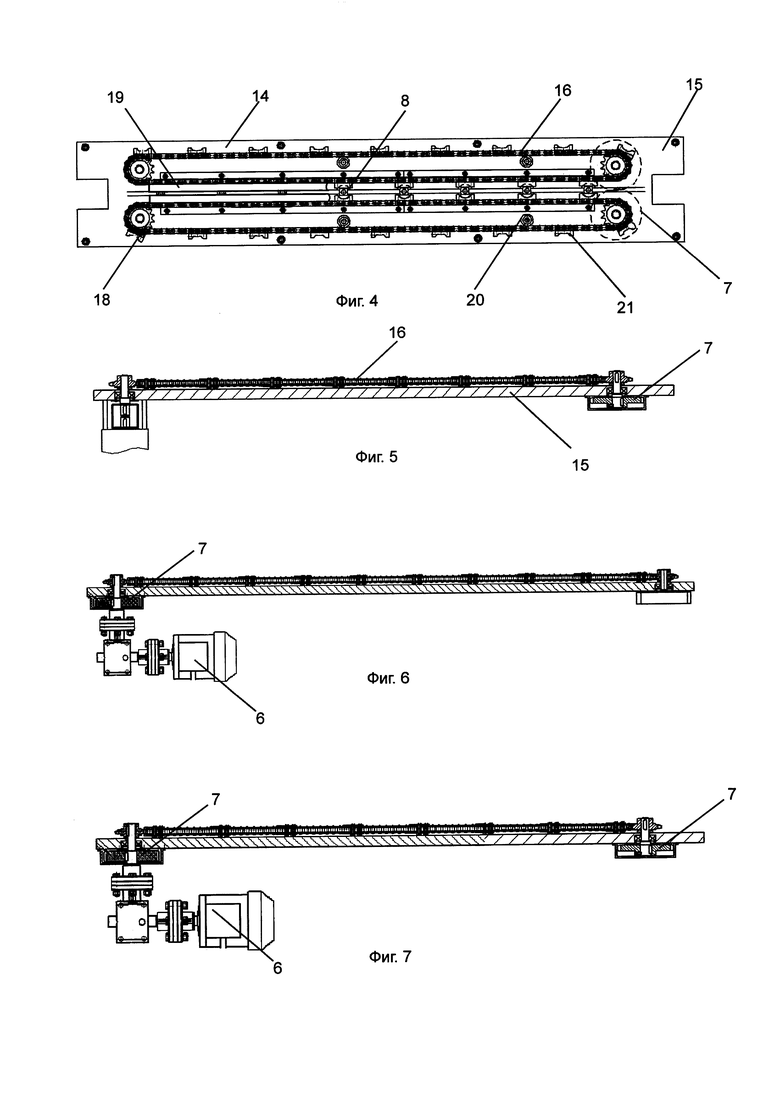
На фиг. 2 - Вид устройства для перемещения бесконечных конвейерных цепей с четырьмя приводами и одним двигателем.
На фиг. 3 - Вид направляющих в сечении с роликами и парными роликами.
На фиг. 4 - Вид приводного цепного механизма.
На фиг. 5 - Вид приводного цепного механизма с приводными звездочками, расположенными в противоположной от двигателя стороне.
На фиг. 6 - Вид приводного цепного механизма с приводными звездочками, расположенными со стороны двигателя.
На фиг. 7 - Вид приводного цепного механизма с приводными звездочками, расположенными со стороны двигателя и с противоположной стороны.
Устройство для перемещения бесконечных конвейерных цепей включает конвейерные цепи, выполненные в виде звеньев; направляющие; как минимум один двигатель и как минимум один привод с приводной звездочкой, (см. фиг. 1, 2)
Каждая конвейерная цепь выполнена в виде соединенных между собой звеньев, где расчетное количество соединений звеньев снабжены роликами, штыри которых выполнены удлиненными с одной стороны. Направляющая выполнена в виде жесткого С-образного в сечении профиля, плотно охватывающего конвейерную цепь и расположенного таким образом, что удлиненные части штырей роликов выступают из проема С-образного профиля. Изгибы направляющей могут быть выполнены в разных плоскостях, а сами направляющие всегда выполнены одинаковыми по форме и расположены зеркально по отношению друг к другу таким образом, что удлиненные части штырей роликов каждой направляющей направлены друг к другу и синхронизированы относительно друг друга. Каждая направляющая выполнена с разрывом для установки привода, (см. фиг. 1, 3, 4, 5)
Расчетное количество соединений звеньев конвейерной цепи могут быть снабжены дополнительными роликами с внешней стороны цепи. Количество роликов для звеньев конвейерной цепи рассчитывают в соответствии с предполагаемой нагрузкой. При этом устанавливают дополнительные ролики в звеньях конвейерной цепи для усиления сохранности, а именно исключения трения и царапания внутри С-образного в сечении профиля. Повышение сохранности С-образного профиля обеспечивает противовес, созданный каждым дополнительным роликом. В момент когда, например, лоток весит на штырях и давит на внутренние концы штырей роликов вниз, другие концы штырей с дополнительными роликами создает противовес, обеспечивая тем самым независимое вращение внутреннего ролика, (см. фиг. 3)
Привод выполнен в виде приводного цепного механизма, который закреплен на основании и выполнен в виде двух не связанных между собой цепных передач. Цепные передачи расположены параллельно друг другу и двигаются в разных направлениях относительно друг друга. Цепные передачи приводят в движение посредством как минимум двух приводных звездочек, входящих в зацепление со своей парой, и звездочек цепных передач. Внутренняя часть каждой цепной передачи ограничена П-образным в сечении коробом, закрепленным на основании и развернутым своей открытой частью внутрь. Внешняя часть каждой цепной передачи снабжена как минимум одним натяжителем цепи. Цепь каждой цепной передачи снабжена расчетным количеством захватов, расположенных на одинаковом расстоянии друг от друга. Каждый захват одной цепи синхронизирован относительно каждого захвата второй цепи, а расстояние между захватами равно расстоянию между роликами конвейерной цепи. Приводных звездочек в приводном цепном механизме может быть четыре. Приводной цепной механизм можно установить на любом прямом участке бесконечной конвейерной цепи. На устройство можно установить несколько приводных цепных механизмов на любых прямых участках бесконечной конвейерной цепи. При установке нескольких приводных цепных механизмов только один из множества приводных цепных механизмов может содержать двигатель, при этом два цепных механизма, один из которых содержит двигатель, установлены параллельно и объединены передающим движение валом, соединяющим одну из звездочек одной из цепных передач со звездочкой параллельной цепной передачи параллельного цепного механизма передающего движение, а остальные цепные механизмы объединены с цепными механизмами, содержащими вал, посредством приводных цепей, (см. фиг. 4, 5, 6, 7)
Захваты выполнены с возможностью двустороннего захвата и перемещения роликов. Захваты выполнены в виде одностороннего либо двустороннего толкающего ролик элемента, (см. фиг. 4)
Преимущества перед прототипом:
1. Устройство для перемещения бесконечных конвейерных цепей универсально и может применяться в различных областях промышленности от перемещения подвешенных грузов, например теплицы, до перемещения тяжелых габаритных грузов, например сушка древесины и т.д.
2. Устройство для перемещения бесконечных конвейерных цепей выполнено таким образом, что, в зависимости от промышленного назначения, может быть выполнено в различных конфигурациях: как с использованием одного привода, так и с использованием нескольких приводов, причем при установке нескольких приводов устройство возможно снабжать одним двигателем на все приводы, либо на каждый привод свой двигатель.
3. Устройство для перемещения бесконечных конвейерных цепей выполнено без использования направляющих звездочек конвейерной цепи, что облегчает и удешевляет конструкцию.
4. Устройство для перемещения бесконечных конвейерных цепей выполнено с возможностью максимального использования пространства за счет отказа от направляющих звездочек конвейерной цепи и использования С-образного в сечении профиля направляющей.
Все вышесказанное говорит о выполнении поставленной технической задачи и о промышленной применимости заявленного устройства для перемещения бесконечных конвейерных цепей.
Перечень позиций:
1. Устройство для перемещения бесконечных конвейерных цепей
2. Конвейерная цепь
3. Звенья конвейерной цепи
4. Направляющая
5. Привод
6. Двигатель
7. Приводная звездочка
8. Ролик
9. Дополнительный ролик
10. Штырь
11. Штырь, удлиненный с одной стороны.
12. С-образный в сечении профиль
13. Разрыв для установки привода
14. Приводной цепной механизм
15. Основание
16. Цепная передача
17. Лоток
18. Звездочка цепной передачи
19. П-образный в сечении короб
20. Натяжитель цепи
21. Захват
22. Прямой участок
23. Вал
24. Приводная цепь
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для вырубки деталей из полосовых эластичных заготовок | 1984 |
|
SU1333589A1 |
| МНОГОСЛОЙНЫЙ СТРОИТЕЛЬНЫЙ ЭЛЕМЕНТ, СПОСОБ ЕГО ПРОИЗВОДСТВА И ТЕХНОЛОГИЧЕСКАЯ ЛИНИЯ ПО ПРОИЗВОДСТВУ МНОГОСЛОЙНОГО СТРОИТЕЛЬНОГО ЭЛЕМЕНТА | 2017 |
|
RU2645314C1 |
| Раскладчик нити | 1990 |
|
SU1726346A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ПОЛОТНА С НАНЕСЕННЫМИ НА НЕГО ИЗОБРАЖЕНИЯМИ ДЛЯ ИХ ПОСЛЕДОВАТЕЛЬНОЙ ДЕМОНСТРАЦИИ С ОДНОЙ ИЛИ БОЛЕЕ СТОРОН НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529079C2 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |
| Секционный конвейер транспортно-накопительной системы | 1989 |
|
SU1691238A1 |
| Способ формирования каскадного потока печатных изделий и устройство для его осуществления | 1988 |
|
SU1708154A3 |
| Цепная передача | 1990 |
|
SU1776901A1 |
| ПЛАСТИНЧАТЫЙ КОНВЕЙЕР | 2011 |
|
RU2473811C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
Устройство включает конвейерные цепи; направляющие; двигатель и привод с приводной звездочкой. Каждая конвейерная цепь выполнена в виде соединенных между собой звеньев. Расчетное количество соединений звеньев снабжено роликами с удлиненными штырями. Направляющая выполнена в виде жесткого С-образного в сечении профиля, плотно охватывающего конвейерную цепь. Удлиненные части штырей роликов выступают из проема С-образного профиля. Каждая направляющая выполнена с разрывом для установки привода в виде приводного цепного механизма, который закреплен на основании и выполнен в виде двух цепных передач. Внутренняя часть каждой цепной передачи ограничена П-образным в сечении коробом, закрепленным на основании и развернутым своей открытой частью внутрь. Внешняя часть каждой цепной передачи снабжена натяжителем цепи. Цепь каждой цепной передачи снабжена захватами. Расстояние между захватами равно расстоянию между роликами конвейерной цепи. Захваты выполнены с возможностью двустороннего захвата и перемещения роликов. Обеспечивается компактное устройство для перемещения бесконечных конвейерных цепей с плавным равномерным движением в разных плоскостях без использования направляющих звездочек. 6 з.п. ф-лы, 7 ил.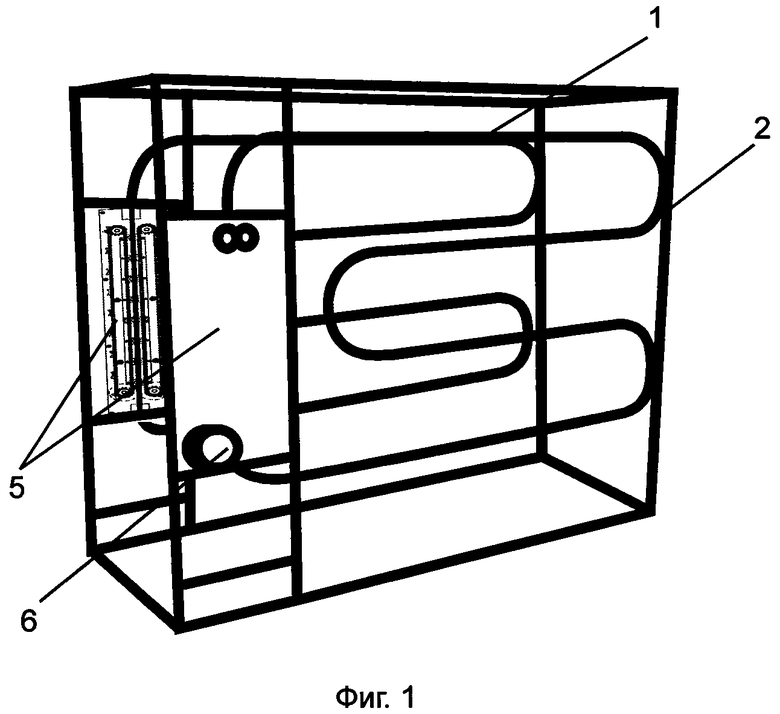
1. Устройство для перемещения бесконечных конвейерных цепей, включающее конвейерные цепи, выполненные в виде звеньев, направляющие, как минимум один двигатель и как минимум один привод с приводной звездочкой,
отличающееся тем, что
каждая конвейерная цепь выполнена в виде соединенных между собой звеньев, где расчетное количество соединений звеньев снабжены роликами, штыри которых выполнены удлиненными с одной стороны, при этом направляющая выполнена в виде жесткого С-образного в сечении профиля, плотно охватывающего конвейерную цепь и расположенного таким образом, что удлиненные части штырей роликов выступают из проема С-образного профиля, причем изгибы направляющей могут быть выполнены в разных плоскостях, а сами направляющие всегда выполнены одинаковыми по форме и расположены зеркально по отношению друг к другу таким образом, что удлиненные части штырей роликов каждой направляющей направлены друг к другу и синхронизированы относительно друг друга, при этом каждая направляющая выполнена с разрывом для установки привода, при этом сам привод выполнен в виде приводного цепного механизма, который закреплен на основании и выполнен в виде двух не связанных между собой цепных передач, расположенных параллельно друг другу и двигающихся в разных направлениях относительно друг друга, при этом цепные передачи приводят в движение посредством как минимум двух приводных звездочек, входящих в зацепление со своей парой, и звездочек цепных передач, причем внутренняя часть каждой цепной передачи ограничена П-образным в сечении коробом, закрепленным на основании и развернутым своей открытой частью внутрь, а внешняя часть каждой цепной передачи снабжена как минимум одним натяжителем цепи, при этом цепь каждой цепной передачи снабжена расчетным количеством захватов, расположенных на одинаковом расстоянии друг от друга, причем каждый захват одной цепи синхронизирован относительно каждого захвата второй цепи, при этом расстояние между захватами равно расстоянию между роликами конвейерной цепи, а сами захваты выполнены с возможностью двустороннего захвата и перемещения роликов.
2. Устройство для перемещения бесконечных конвейерных цепей по п. 1, отличающееся тем, что приводных звездочек в приводном цепном механизме выполнено четыре.
3. Устройство для перемещения бесконечных конвейерных цепей по п. 1, отличающееся тем, что приводной цепной механизм устанавливают на любом прямом участке бесконечной конвейерной цепи.
4. Устройство для перемещения бесконечных конвейерных цепей по п. 1, отличающееся тем, что устанавливают несколько приводных цепных механизмов на любых прямых участках бесконечной конвейерной цепи, причем каждый приводной цепной механизм снабжен двигателем.
5. Устройство для перемещения бесконечных конвейерных цепей по п. 4, отличающееся тем, что устанавливают несколько приводных цепных механизмов на любых прямых участках бесконечной конвейерной цепи, причем только один из множества приводных цепных механизмов содержит двигатель, при этом два цепных механизма, один из которых содержит двигатель, установлены параллельно и объединены передающим движение валом, соединяющим одну из звездочек одной из цепных передач со звездочкой параллельной цепной передачи параллельного цепного механизма, передающего движение, при этом остальные цепные механизмы объединены с цепными механизмами, содержащими вал, посредством приводных цепей.
6. Устройство для перемещения бесконечных конвейерных цепей по п. 1, отличающееся тем, что расчетное количество соединений звеньев конвейерной цепи снабжены дополнительными роликами с внешней стороны цепи.
7. Устройство для перемещения бесконечных конвейерных цепей по п. 1, отличающееся тем, что количество роликов для звеньев конвейерной цепи рассчитывают в соответствии с предполагаемой нагрузкой.
| US 4613034 A, 23.09.1986 | |||
| Способ обеспечения ведения огня очередями оружия с откатом центра масс стреляющего агрегата лафетированного оружия вдоль оси канала ствола | 2016 |
|
RU2616094C1 |
| US 5069327 А, 03.12.1991. | |||

