Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации радиолокационных целей.
Наиболее близкими по технической сущности к заявляемому способу (прототипом) является способ идентификации радиолокационных целей, реализуемый в автономной системе опознавания с активным ответом (АСОАО) (см., например, Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: «Радиотехника», 2006. - 656 с. С. 623-624).
К недостаткам данного способа относится существенное снижение вероятности правильной идентификации целей при повышении плотности потока ответных сигналов из-за низкой помехоустойчивости радиолокационного запросчика (РЗ) АСОАО к внутрисистемным помехам. Основной причиной этого являются ошибки, возникающие в результате пересечения (частичного наложения) ответных сигналов нескольких идентифицируемых целей, находящихся в пределах объема неопределенности РЗ АСОАО.
Техническим результатом изобретения является повышение вероятности правильной идентификации целей в условиях высокой плотности потока ответных сигналов.
Указанный результат достигается тем, что в известном способе идентификации радиолокационных целей, реализуемом в АСОАО, основанном на обнаружении целей радиолокационной станцией (РЛС), формировании и передачи кодированного запросного сигнала радиолокационным запросчиком, приеме и обработке данного запросного сигнала радиолокационным ответчиком на стороне каждого i-го объекта, где  I - число объектов, находящихся в зоне действия радиолокационного запросчика, имеющих радиолокационный ответчик, формировании и передачи кодированного ответного сигнала радиолокационным ответчиком со стороны каждого i-го объекта, приеме и обработке данных ответных сигналов, а так же формировании решения об идентификационном признаке обнаруженной цели радиолокационным запросчиком, в процессе обработки ответных сигналов оценивают мощность синхроимпульса ответного сигнала Р и мощность импульсов на ложных временных позициях (ложных импульсов) ответного сигнала Pk, где
I - число объектов, находящихся в зоне действия радиолокационного запросчика, имеющих радиолокационный ответчик, формировании и передачи кодированного ответного сигнала радиолокационным ответчиком со стороны каждого i-го объекта, приеме и обработке данных ответных сигналов, а так же формировании решения об идентификационном признаке обнаруженной цели радиолокационным запросчиком, в процессе обработки ответных сигналов оценивают мощность синхроимпульса ответного сигнала Р и мощность импульсов на ложных временных позициях (ложных импульсов) ответного сигнала Pk, где  K - число ложных временных позиций ответного сигнала, оценивают невязку ΔPk между величинами Р и Pk, сравнивают невязку ΔPk с определенным на основе заданной вероятности ошибки первого рода пороговым значением h, если невязка ΔPk превышает пороговое значение h, то запрещают дальнейшую обработку k-го ложного импульса, в противном случае осуществляют дальнейшую обработку k-го ложного импульса в соответствии с прототипом.
K - число ложных временных позиций ответного сигнала, оценивают невязку ΔPk между величинами Р и Pk, сравнивают невязку ΔPk с определенным на основе заданной вероятности ошибки первого рода пороговым значением h, если невязка ΔPk превышает пороговое значение h, то запрещают дальнейшую обработку k-го ложного импульса, в противном случае осуществляют дальнейшую обработку k-го ложного импульса в соответствии с прототипом.
Сущность изобретения заключается в применении в РЗ АСОАО, наряду с существующими видами селекции ответного сигнала, дополнительной селекции импульсов на ложных временных позициях по уровню мощности по отношению к синхроимпульсу. Это позволяет исключить из дальнейшей обработки существенную часть помеховых импульсов, которые не соответствуют по уровню мощности синхроимпульсу и тем самым повысить вероятность правильной идентификации целей.
Данный способ включает в себя следующие этапы:
1. На стороне запрашивающего объекта осуществляется обнаружение целей радиолокационной станцией, формирование и передача кодированного запросного сигнала радиолокационным запросчиком в соответствии с прототипом;
2. На стороне i-го объекта осуществляется прием и обработка кодированного запросного сигнала, формирование и передача кодированного ответного сигнала радиолокационным ответчиком в соответствии с прототипом;
3. На стороне запрашивающего объекта осуществляется:
3.1. Прием и обработка ответных сигналов в соответствии с прототипом, при этом в процессе обработки ответных сигналов дополнительно осуществляются следующие процедуры:
- оценивается мощность синхроимпульса ответного сигнала Р;
- оценивается мощность импульсов на ложных временных позициях ответного сигнала Pk;
- оценивается невязка между величинами Р и Pk, для каждого k в соответствии с выражением

- формируется решение о продолжении или прекращении дальнейшей обработки k-го ложного импульса в соответствии с решающим правилом

где при qk=0 - формируется решение о прекращении дальнейшей обработки k-го ложного импульса, при qk=1 - формируется решение о продолжении дальнейшей обработки k-го ложного импульса в соответствии с прототипом, h - пороговое значение, определяемое исходя из заданного значения вероятности ошибки первого рода.
3.2. Формирование решения об идентификационном признаке цели в соответствии с прототипом.
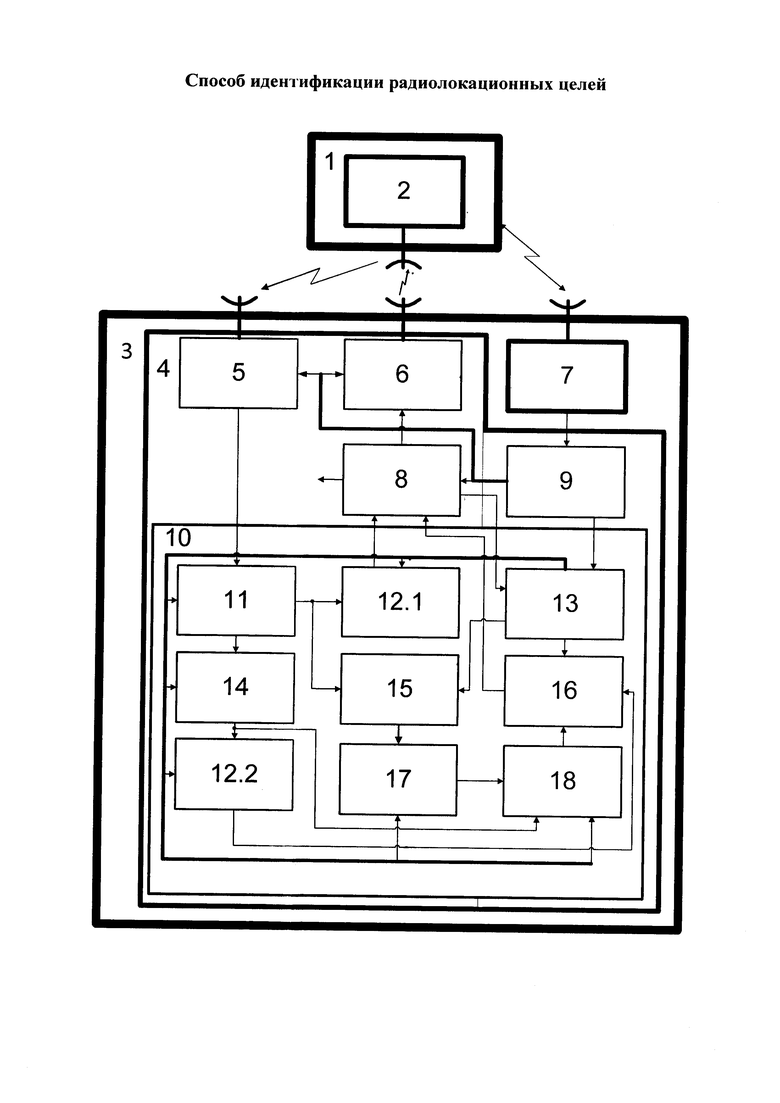
Данный способ может быть реализован, например, с помощью системы устройств, структурная схема которой приведена на фигуре, где обозначено: 1 - запрашиваемый (идентифицируемый) объект, 2 - радиолокационный ответчик (РО), 3 - запрашивающий (идентифицирующий) объект, 4 - радиолокационный запросчик (РЗ), 5 - приемник запросчика (ПРМЗ), 6 - передатчик запросчика (ПРДЗ), 7 - РЛС, 8 - кодирующее-декодирующее устройство запросчика (КДУЗ), 9 - синхронизатор запросчика (СЗ), 10 - Селектор ложных импульсов (СЛИ), 11 - коммутатор, 12 - линия задержки, 13 - устройство управления селектором (УУС), 14 - устройство оценки мощности ложных импульсов (УОМЛИ), 15 - устройство оценки мощности синхроимпульсов (УОМСИ), 16 - решающее устройство (РУ), 17 - оперативное запоминающее устройство (ОЗУ), 18 - блок оценки невязки (БОН).
РО 2 предназначен для приема и обработка кодированного запросного сигнала, а так же для формирования и передачи кодированного ответного сигнала в соответствии с прототипом. РЗ 4 предназначен для формирования и передачи кодированного запросного сигнала в соответствии с прототипом, приема и обработки ответных сигналов с применением дополнительной селекцией ложных импульсов по уровню мощности синхроимпульса. ПРМЗ 5 предназначен для приема ответных сигналов и формирования в соответствии с прототипом стандартных сигналов (импульсов), подлежащих дальнейшей обработке. ПРДЗ 6 предназначен для формирования и передачи кодированных запросных сигналов в соответствии с прототипом. РЛС 7 предназначена для обнаружения идентифицируемых объектов, формирования и выдачи управляющих команд в РЗ 4 в соответствии с прототипом. КДУЗ 8 предназначено для кодирования запросных сигналов и декодирования ответных сигналов в соответствии с прототипом. СЗ 9 предназначен для синхронизации работы элементов РЗ 4 под воздействием управляющих команд, поступающих с РЛС 7. СЛИ 10 предназначен для селекции ложных импульсов по уровню мощности синхроимпульса. Коммутатор 11 предназначен для подключения выхода ПРМЗ 5 к входу УОМСИ 15 на интервал времени действия синхроимпульса ответного сигнала или к входу УОМЛИ 14 на интервал времени, соответствующий временной позиции ложного импульса. ЛЗ 12.1 предназначена для задержки синхроимпульса на интервал времени, соответствующий длительности обработки ложного импульса в СЛИ 10. ЛЗ 12.2 предназначена для задержки ложных импульсов на интервал времени, соответствующий длительности их обработки в УОМЛИ 14, БОН 18 и РУ 16. УУС 13 предназначено для управления работой элементов СЛИ 10. УОМЛИ 14 предназначено для оценки мощности ложного импульса Pk. УОМСИ 15 предназначено для оценки мощности синхроимпульса Р. РУ 16 предназначено для формирования решения о продолжении qk=1 или прекращении qk=0 дальнейшей обработки k-го ложного импульса в соответствии с решающим правилом (2). ОЗУ 17 предназначено для записи и временного хранения значения мощности синхроимпульса Р. БОН 18 предназначен для оценки невязки ΔPk между величинами Р и Pk в соответствии с выражением (1).
Система устройств реализации предлагаемого способа работает следующим образом. РЛС 7 обнаруживает идентифицируемый объект 1, формирует и выдает управляющие команды в РЗ 4 в соответствии с прототипом. Под воздействием данных команд СЗ 9 синхронизирует работу элементов РЗ 4. КДУЗ 8 кодирует запросные сигналы. ПРДЗ 6 на основе информации, поступающей от КДУЗ 8, формирует и передает кодированные запросные сигналы в соответствии с прототипом. РО 2 принимает и обрабатывает данные запросные сигналы, а так же формирует и передает кодированные ответные сигналы в соответствии с прототипом. ПРМЗ 5 принимает данные ответные сигналы и формирует в соответствии с прототипом стандартные импульсы. Данные импульсы поступают в СЛИ 10 на коммутатор 11. УУС 13 под воздействием синхронизирующих сигналов СЗ 9 и на основе информации о действующем коде ответного сигнала, поступающей от КДУЗ 8, управляет работой элементов СЛИ 10. Коммутатор 11 подключает выход ПРМЗ 5 к входу УОМСИ 15 на интервал времени действия синхроимпульса ответного сигнала или к входу УОМЛИ 14 на интервал времени, соответствующий временной позиции ложного импульса. С выхода коммутатора 11 ложные импульсы поступают на УОМЛИ 14 и на ЛЗ 12.2, а синхроимпульс поступает на УОМСИ 15 и на ЛЗ 12.1. Задержанный в ЛЗ 12.1 синхроимпульс на интервал времени, соответствующий длительности обработки ложного импульса в СЛИ 10 поступает для дальнейшей обработки в КДУЗ 8, где он обрабатывается в соответствии с прототипом. УОМСИ 15 оценивает мощность синхроимпульса Р, значение которой записывается в ОЗУ 17 на интервал времени, соответствующий временной базе ответного сигнала. УОМЛИ 14 оценивает значения мощностей ложных импульсов Pk, которые поступают на БОН 18. Также на БОН 18 поступает величина Р из ОЗУ 17. БОН 18 оценивает значение невязки ΔPk между величинами Р и Pk в соответствии с выражением (1). Значение невязки ΔPk поступает на РУ 16. РУ 16 формирует решение о продолжении qk=1 или прекращении qk=0 дальнейшей обработки k-го ложного импульса в соответствии с решающим правилом (2). Если в РУ 16 формируется решение qk=l, то k-й ложный импульс, задержанный в ЛЗ 12.2 на интервал времени, соответствующий длительности его обработки в УОМЛИ 14, БОН 18 и РУ 16, поступает для дальнейшей обработки в КДУЗ 8, где он обрабатывается в соответствии с прототипом. Если в РУ 16 формируется решение qk=0, то k-й ложный импульс исключается из дальнейшей обработки. КДУЗ 8 декодирует ответные сигналы (обрабатывает стандартные импульсы, поступившие на ее вход, и формирует решение об идентификационном признаке радиолокационной цели) в соответствии с прототипом. С выхода КДУЗ 8 сформированное решение об идентификационном признаке цели поступает к потребителю.
Проведенное исследование с использованием имитационных моделей устройств реализации прототипа и предлагаемого способа показало, что предлагаемый способ позволяет повысить достоверность идентификации радиолокационных целей по отношению к прототипу в зависимости от плотности потока ответных сигналов до 10%.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен способ идентификации радиолокационных целей с применением дополнительной селекции импульсов на ложных временных позициях ответного сигнала по уровню мощности по отношению к синхроимпульсу.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что применение дополнительной селекции импульсов на ложных временных позициях ответного сигнала по уровню мощности по отношению к синхроимпульсу приведет к повышению достоверности идентификации целей в условиях высокой плотности ответных сигналов.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы элементы, широко распространенные в области электронной и электротехники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2023 |
|
RU2809767C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2018 |
|
RU2708078C1 |
| Способ прямой идентификации воздушных целей | 2018 |
|
RU2701721C1 |
| СПОСОБ ПРЯМОЙ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791600C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2016 |
|
RU2659090C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2022 |
|
RU2791599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2024 |
|
RU2831760C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ НАЗЕМНЫХ ЦЕЛЕЙ | 2020 |
|
RU2741613C1 |
| СПОСОБ ДВУХПОЗИЦИОННОЙ ИДЕНТИФИКАЦИИ НАЗЕМНОЙ ЦЕЛИ | 2022 |
|
RU2797996C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
Изобретение относится к области радиотехники и может быть использовано при создании средств идентификации радиолокационных целей. Техническим результатом изобретения является повышение вероятности правильной идентификации целей в условиях высокой плотности потока ответных сигналов. Сущность изобретения заключается в применении в радиолокационном запросчике, наряду с существующими видами селекции ответного сигнала, дополнительной селекции импульсов на ложных временных позициях по уровню мощности по отношению к синхроимпульсу. Это позволяет исключить из дальнейшей обработки существенную часть помеховых импульсов, которые не соответствуют по уровню мощности синхроимпульсу, и тем самым повысить вероятность правильной идентификации целей. 1 ил.
Способ идентификации радиолокационных целей, основанный на обнаружении целей радиолокационной станцией, формировании кодированного запросного сигнала кодирующим-декодирующим устройством радиолокационного запросчика, передаче кодированного запросного сигнала передатчиком радиолокационного запросчика, приеме и обработке данного запросного сигнала радиолокационным ответчиком на стороне каждого i-го объекта, где  I - число объектов, находящихся в зоне действия радиолокационного запросчика, имеющих радиолокационный ответчик, формировании и передаче кодированного ответного сигнала радиолокационным ответчиком со стороны каждого i-го объекта, приеме данных ответных сигналов приемником радиолокационного запросчика, декодировании принятых ответных сигналов кодирующим-декодирующим устройством радиолокационного запросчика, обработке кодирующим-декодирующим устройством радиолокационного запросчика поступивших на ее вход стандартных импульсов - импульсов, сформированных приемником радиолокационного запросчика в результате приема ответных сигналов, и формировании решения об идентификационном признаке обнаруженной цели, отличающийся тем, что после приема ответных сигналов приемником радиолокационного запросчика с использованием селектора ложных импульсов осуществляют селекцию ложных импульсов - импульсов на ложных временных позициях ответного сигнала, по уровню мощности по отношению к синхроимпульсу, для этого оценивают мощность синхроимпульса ответного сигнала Р и мощность импульсов на ложных временных позициях ответного сигнала Pk, где
I - число объектов, находящихся в зоне действия радиолокационного запросчика, имеющих радиолокационный ответчик, формировании и передаче кодированного ответного сигнала радиолокационным ответчиком со стороны каждого i-го объекта, приеме данных ответных сигналов приемником радиолокационного запросчика, декодировании принятых ответных сигналов кодирующим-декодирующим устройством радиолокационного запросчика, обработке кодирующим-декодирующим устройством радиолокационного запросчика поступивших на ее вход стандартных импульсов - импульсов, сформированных приемником радиолокационного запросчика в результате приема ответных сигналов, и формировании решения об идентификационном признаке обнаруженной цели, отличающийся тем, что после приема ответных сигналов приемником радиолокационного запросчика с использованием селектора ложных импульсов осуществляют селекцию ложных импульсов - импульсов на ложных временных позициях ответного сигнала, по уровню мощности по отношению к синхроимпульсу, для этого оценивают мощность синхроимпульса ответного сигнала Р и мощность импульсов на ложных временных позициях ответного сигнала Pk, где  K - число ложных временных позиций ответного сигнала, оценивают невязку ΔPk между величинами Р и Pk, сравнивают невязку ΔPk с пороговым значением h, если невязка ΔPk превышает пороговое значение h, то запрещают дальнейшую обработку импульса на k-й временной позиции в кодирующем-декодирующем устройстве радиолокационного запросчика - исключают импульс на k-й временной позиции из процесса декодирования ответного сигнала, в противном случае осуществляют дальнейшую обработку импульса на k-й временной позиции в кодирующем-декодирующем устройстве радиолокационного запросчика - включают импульс на k-й временной позиции в процесс декодирования ответного сигнала.
K - число ложных временных позиций ответного сигнала, оценивают невязку ΔPk между величинами Р и Pk, сравнивают невязку ΔPk с пороговым значением h, если невязка ΔPk превышает пороговое значение h, то запрещают дальнейшую обработку импульса на k-й временной позиции в кодирующем-декодирующем устройстве радиолокационного запросчика - исключают импульс на k-й временной позиции из процесса декодирования ответного сигнала, в противном случае осуществляют дальнейшую обработку импульса на k-й временной позиции в кодирующем-декодирующем устройстве радиолокационного запросчика - включают импульс на k-й временной позиции в процесс декодирования ответного сигнала.
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2601872C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ С ОПРОСНЫМ УСТРОЙСТВОМ И МНОЖЕСТВОМ ОТВЕТЧИКОВ, ОТВЕТЧИК СИСТЕМЫ ИДЕНТИФИКАЦИИ | 1993 |
|
RU2156540C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ | 2011 |
|
RU2454717C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2158004C1 |
| JP 4723961 B2, 13.07.2013 | |||
| US 5223839 A, 29.06.1993 | |||
| EP 1508817 A1, 23.02.2005. | |||

