Изобретение относится к области авиации, в частности к высокоманевренным пилотируемым либо беспилотным летательным аппаратам с реактивными двигателями.
Известен способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны, (патент РФ 2634659, авторы Е.И. Захаров, В.В. Мальцев, Ю.В. Богачев, публикация 02.11.2017 г.) Для осуществления данного способа задают траекторию обязательного маневрирования в виде последовательности отдельных участков, соответствующих определенной длительности, определенному расстоянию и направлению ухода от поражения, вычисленому определенным образом. Следует признать рациональным предложенный подход к заданию траектории движения летательного аппарата в зоне возможного поражения средствами ПРО и ПВО. При этом, в данном способе не указаны примеры технического исполнения для осуществления движения летательного аппарата по неуязвимой траектории.
Известен реактивный летательный аппарат с укороченным либо вертикальным взлетом и посадкой который включает кабину управления, фюзеляж, крылья, элементы механизации крыльев и оперения, реактивную силовую установку, систему воздухозаборников, интегрированную систему управления самолетом, при этом силовая установка состоит из реактивных двигателей. (Заявка на изобретение N 2016117529, автор Сушенцев Б.Н., опубликовано 10.11.2017 г.) В первом варианте реактивные двигатели имеют выходные сопла с изменяемым силовым вектором тяги (ИСВТ), при этом для возможности создания устойчивого суммарного уравновешивающего реактивного момента относительно центра тяжести самолета в режиме вертикального подъема, зависания и посадки основания сопел с ИСВТ реактивных двигателей расположены на периметре дискообразного фюзеляжа, при этом срединные оси осннований одиночных либо группы сопел с ИСВТ расположены как минимум в трех направлениях. Во втором варианте создания устойчивого суммарного уравновешивающего реактивного момента относительно центра тяжести самолета в режиме вертикального взлета, зависания и посадки срединные оси оснований одиночных либо группы сопел расположены радиально в трех направлениях, при этом над выходными соплами реактивных двигателей предусмотрены участки круговых либо поворотных крыльев и изменяемым профилем для изменения направления истекающей реактивной струи двигателей. Следует отметить что возможность создания усилий знакопеременных вертикальных реактивных моментов на периметре дискообразного фюзеляжа, с комбинацией осевых тяговых усилий создает пространственное воздействие для резкого непредсказуемого изменения траектории полета летательного аппарата. Целью настоящего изобретения является улучшение управляемости и повышение маневренности высокоскоростного летательного аппарата. Данная цель достигается в способе полета летательного аппарата с интегрированной системой управления по труднопредсказуемой и малоуязвимой траектории, при котором используют один либо несколько реактивных двигателей с выхлопными соплами как минимум в трех направлениях относительно центра тяжести летательного аппарата с изменяемым вектором тяги (ИВТ), которые расположены на периметре дискообразного фюзеляжа, либо на боковых несущих консолях сигарообразного фюзеляжа, заключающийся в том, что в режиме малоуязвимого маневрирования, для непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел с ИВТ создают пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата. Кроме того достижение поставленной цели реализовано в реактивном летательном аппарате который включает фюзеляж, крылья с элементами механизации, интегрированную систему управления, силовую установку из ракетных двигателей с выходными соплами расположенными на периметре дискообразного фюзеляжа, либо на боковых несущих консолях сигарообразного фюзеляжа, при этом по боковым сторонам передней части фюзеляжа расположены реактивные двигатели с возможностью поворота вокруг вертикальной оси, при этом сопла на боковых реактивных двигателях имеют изменяемый вектор тяги (ИВТ), при этом реактивный летательный аппарат имеет один либо два маршевых реактивных двигателя в хвостовой части фюзеляжа, при этом каждый маршевый двигатель имеет центральное маршевое сопло и одно либо группу боковых сопел с ИВТ, при этом режиме малоуязвимого маневрирования, для непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел боковых реактивных двигателей с ИВТ, а также из боковых сопел с ИВТ от маршевых реактивных двигателей создается пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата. На представленных чертежах позициями обозначены:
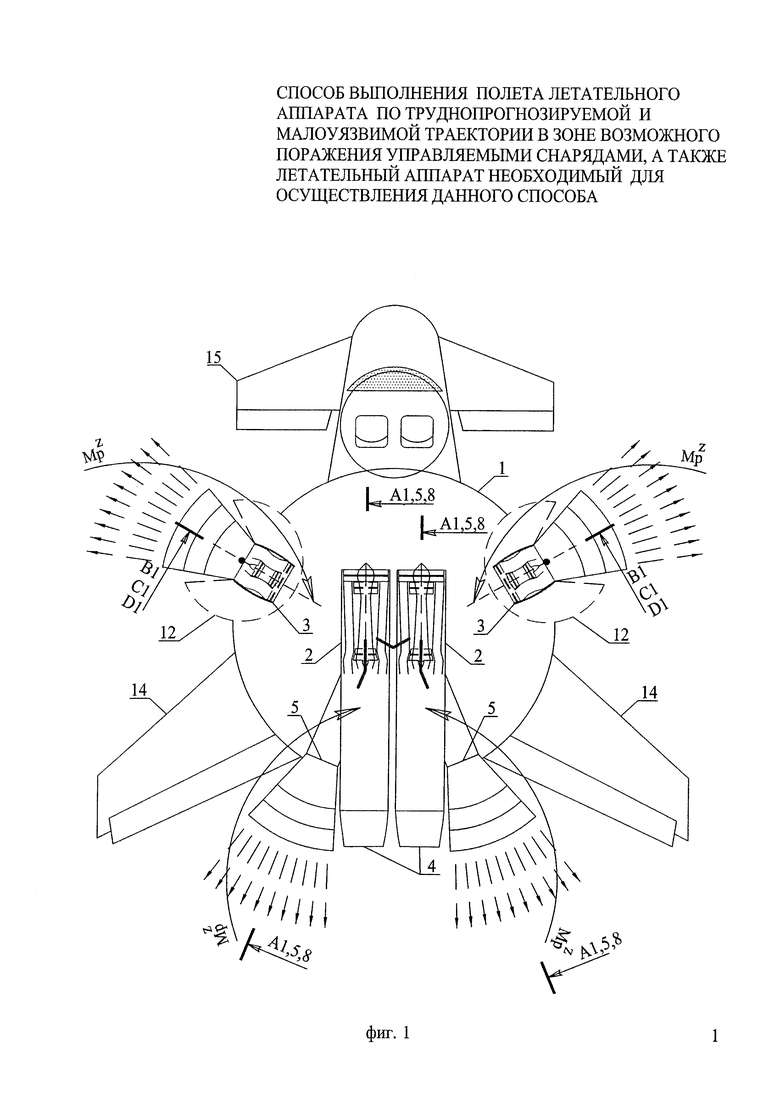
поз. 1 - фюзеляж дискообразной обтекаемой формы;
поз. 2 - маршевый реактивный двигатель ТРДД;
поз. 3 - боковой реактивный двигатель ТРДЦ с соплом с ИВТ;
поз. 4 - маршевое сопло в хвостовой части фюзеляжа;
поз. 5 - боковое сопло маршевого реактивного двигателя ТРДД с ИВТ;
поз. 6 - поворотная часть сопла для изменения вектора тяги в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
поз. 7 - поворотная часть сопла для изменения вектора тяги в виде трансформируемого многопланного крыла;
поз. 8 - основной профиль многопланного крыла;
поз. 9 - выдвигаемые подкрылки многопланного крыла;
поз. 10 - выдвигаемые надкрылки многопланного крыла;
поз. 11 - поворотная часть сопла для изменения вектора тяги в виде шарнирных поворотных плоскостей;
поз. 12 - поворотная платформа для бокового реактивного двигателя с соплами с ИВТ;
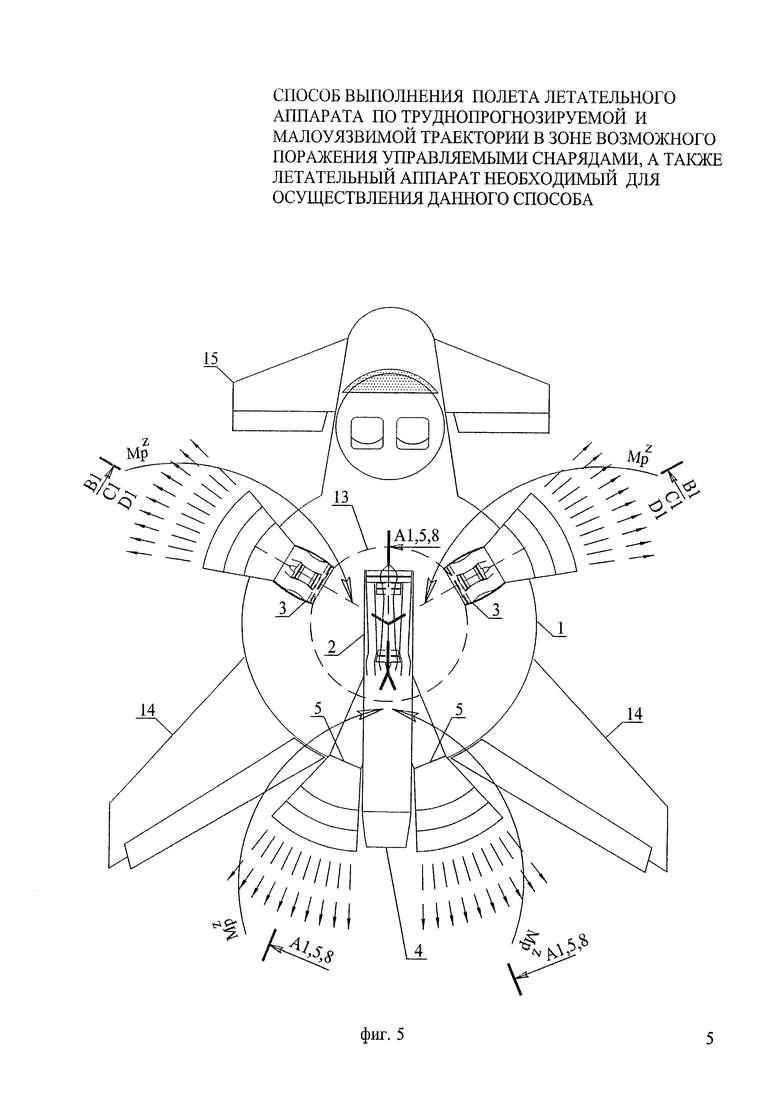
поз. 13 - несущая опорная круговая консоль;
поз. 14 - несущая консоль крыла;
поз. 15- крыло переднего стабилизатора;
MpZ - обозначение направления действия вертикального реактивного момента от истекающей струи двигателей относительно центра тяжести летательного аппарата.
На иллюстрационных примерах данного изобретения показаны варианты исполнения летательных аппаратов с интегрированной системой управления для реализации способа полета по труднопредсказуемой и малоуязвимой траектории:
на фиг. 1 - компоновочная схема реактивного самолета в плане в режиме вертикального подъема, зависания и посадки, включающего кабину управления, дискообразный фюзеляж, крылья прямой стреловидной формы, элементы механизации крыльев и оперения, реактивную силовую установку, при этом реактивная силовая установка состоит из двух маршевых двигателей ТРДД и двух боковых реактивных двигателей ТРДД расположенных на периметре дискообразного фюзеляжа на поворотных платформах, при этом маршевые двигатели снабжены центральным маршевым соплом и боковым соплом с ИВТ, при этом боковые реактивные двигатели ТРДД расположенные по периметру дискообразного фюзеляжа снабжены соплами с ИВТ, при этом создание устойчивого суммарного уравновешенного вертикального реактивного момента обеспечивается истекающими струями из сопел с ИВТ двух боковых реактивных двигателей ТРДД расположенных на периметре дискообразного фюзеляжа, а также из двух боковых сопел с ИВТ центральных маршевых двигателей ТРДД в хвостовой части фюзеляжа;
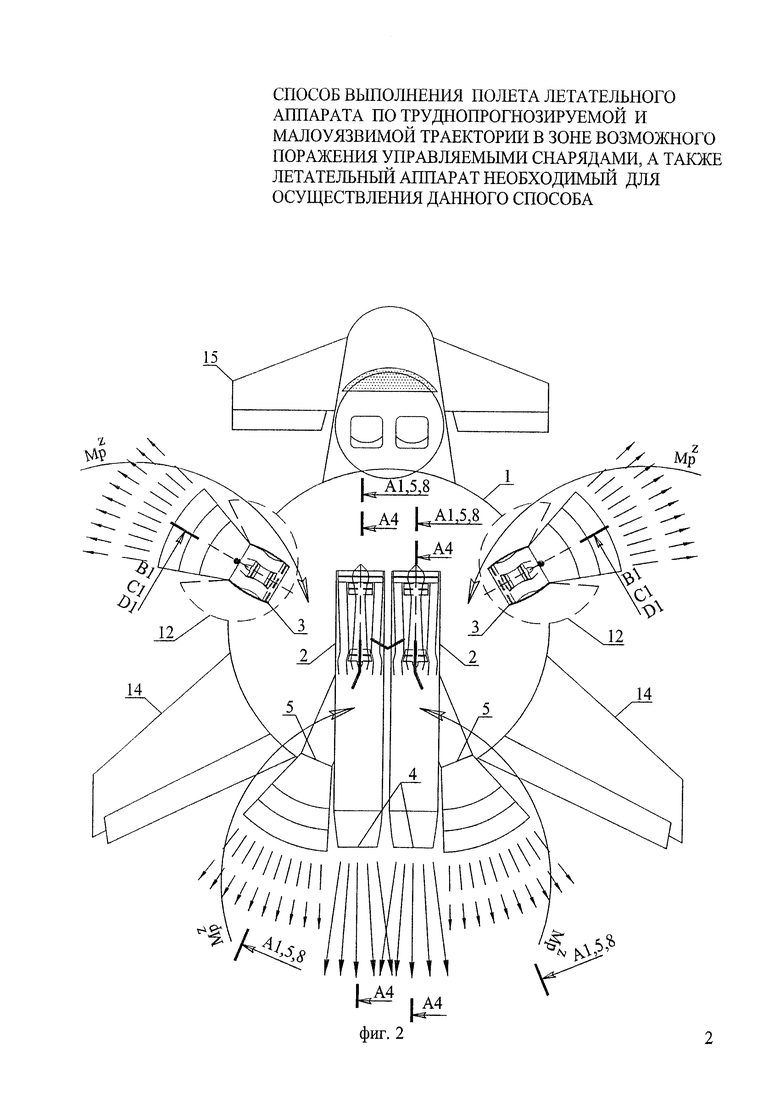
на фиг. 2 - компоновочная схема реактивного самолета в плане по фиг. 1 в режиме начала горизонтального полета и набора скорости;
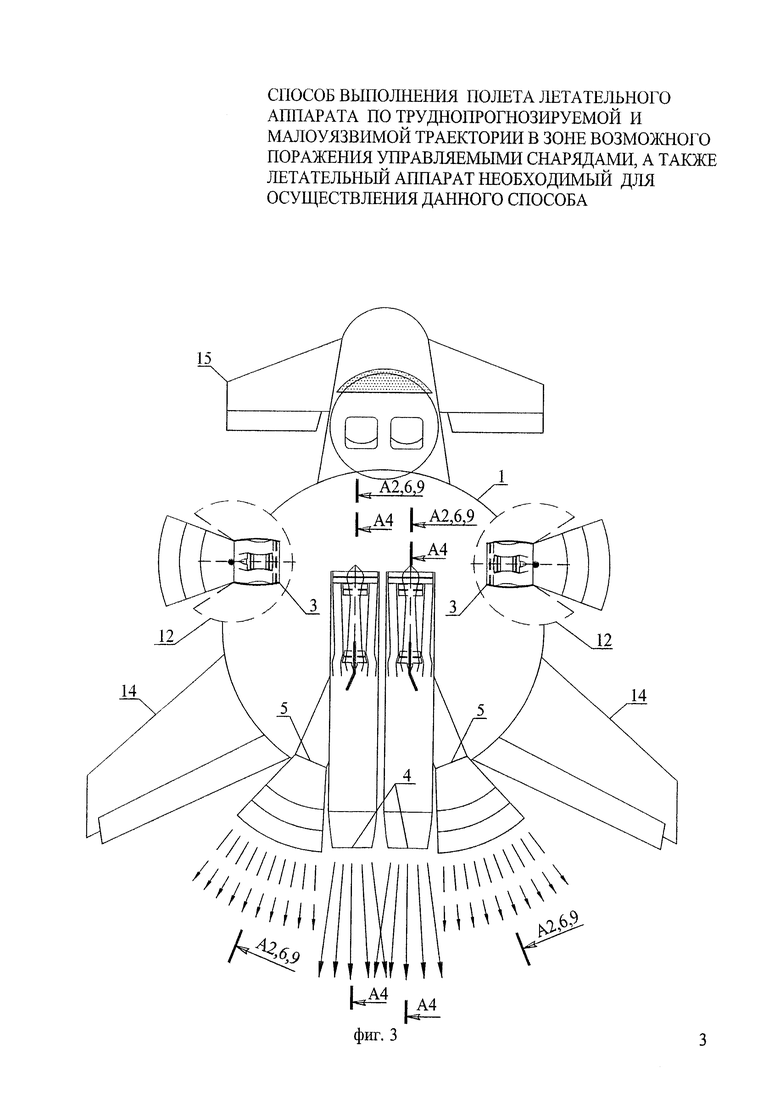
на фиг. 3 - компоновочная схема реактивного самолета в плане по фиг. 1 в режиме крейсерского горизонтального полета;
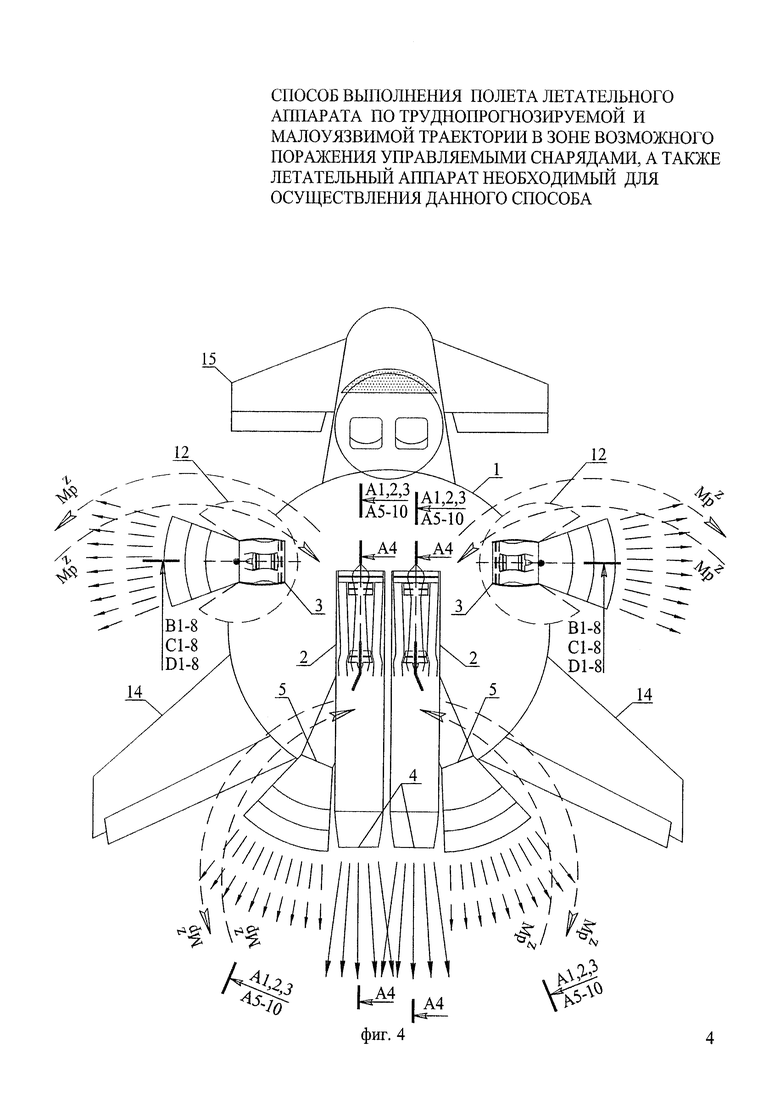
на фиг. 4 - компоновочная схема реактивного самолета в плане по фиг. 1 в режиме непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел с ИВТ, при этом создается пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата;
на фиг. 5 - компоновочная схема реактивного самолета в плане в режиме вертикального подъема, зависания и посадки, включающего кабину управления, дискообразный фюзеляж, крылья прямой стреловидной формы, элементы механизации крыльев и оперения, реактивную силовую установку, при этом реактивная силовая установка состоит из центрального маршевого двигателя ТРДД и двух боковых поворотных реактивных двигателей ТРДД расположенных на периметре дискообразного фюзеляжа на несущей опорной круговой консоли, при этом маршевые двигатели снабжены центральным маршевым соплом и боковыми соплами с ИВТ, при этом боковые поворотные реактивные двигатели ТРДД расположенные по периметру дискообразного фюзеляжа снабжены соплами с ИВТ, при этом создание устойчивого суммарного уравновешенного вертикального реактивного момента обеспечивается истекающими струями из сопел с ИВТ двух боковых реактивных двигателей ТРДД расположенных на периметре дискообразного фюзеляжа, а также из двух боковых сопел с ИВТ центрального маршевого двигателя ТРДД в хвостовой части фюзеляжа;
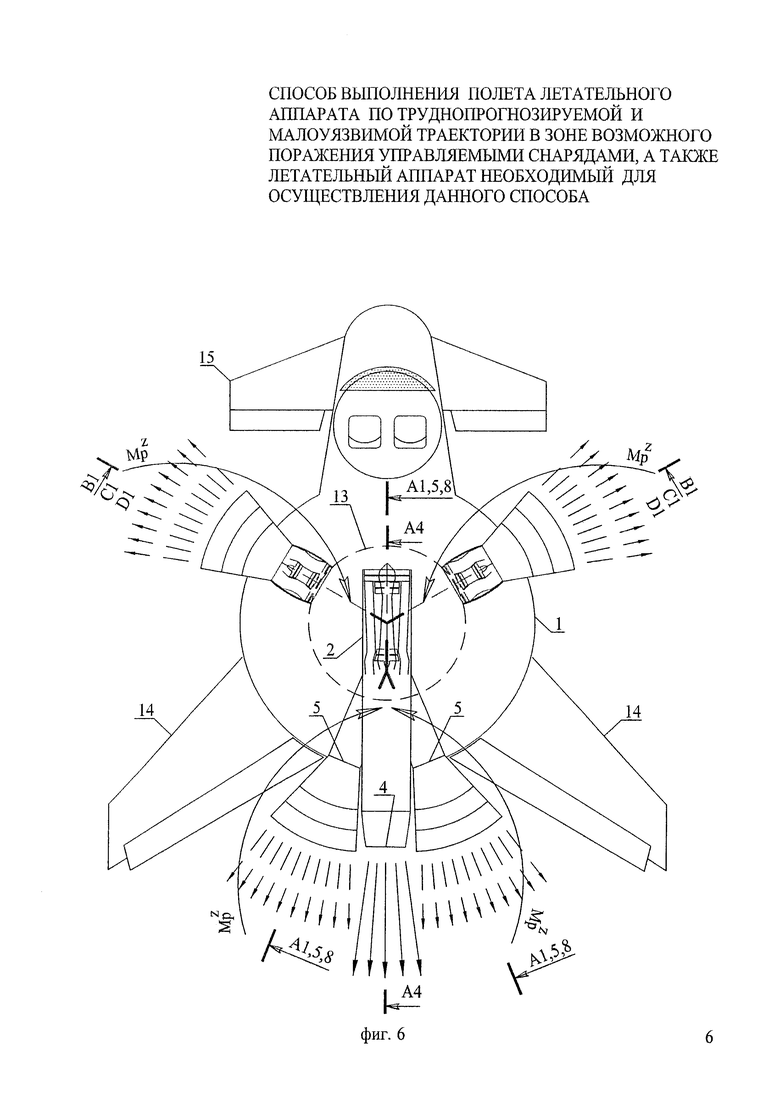
на фиг. 6 - компоновочная схема реактивного самолета в плане по фиг. 5 в режиме начала горизонтального полета и набора скорости;
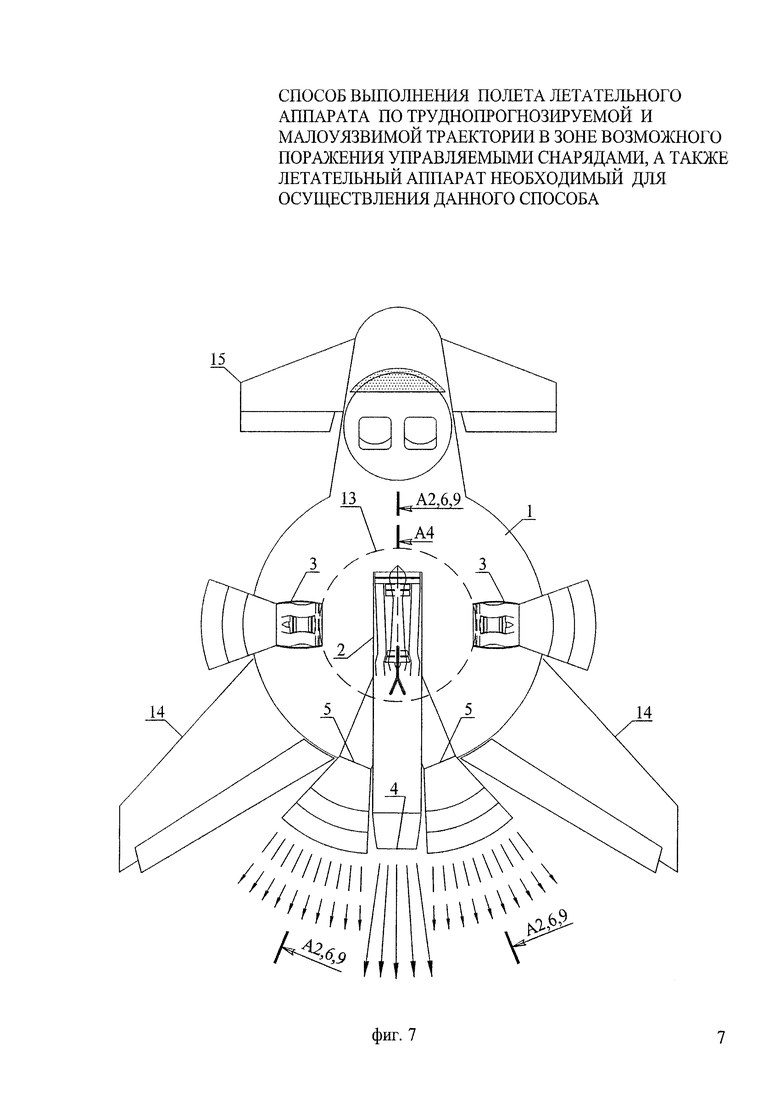
на фиг. 7 - компоновочная схема реактивного самолета в плане по фиг. 5 в режиме крейсерского горизонтального полета;
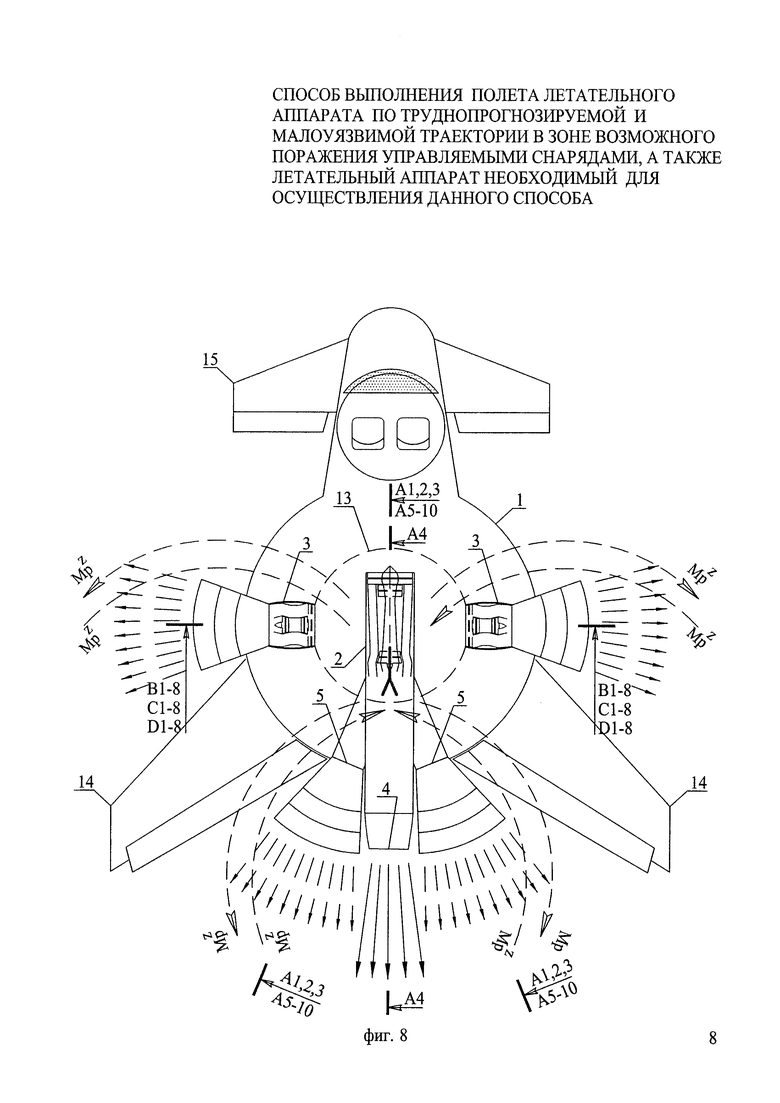
на фиг. 8 - компоновочная схема реактивного самолета в плане по фиг. 5 в режиме непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел с ИВТ, при этом создается пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата;
на фиг. 9, 10 - показаны примеры непредсказуемого изменения положения летательного аппарата в пространстве в плоскости поперек направления продольного полета летательного аппарата;
на фиг. 11 - сечение А1-А1 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 12 - сечение А2-А2 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 13 - сечение A3-A3 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 14 - сечение А4-А4 по реактивным маршевым двигателям ТРДД по маршевому соплу;
на фиг. 15 - сечение В1-В1 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 16, 17 - сечение В2-В2, сечение В3-В3 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 18 - сечение В4-В4 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
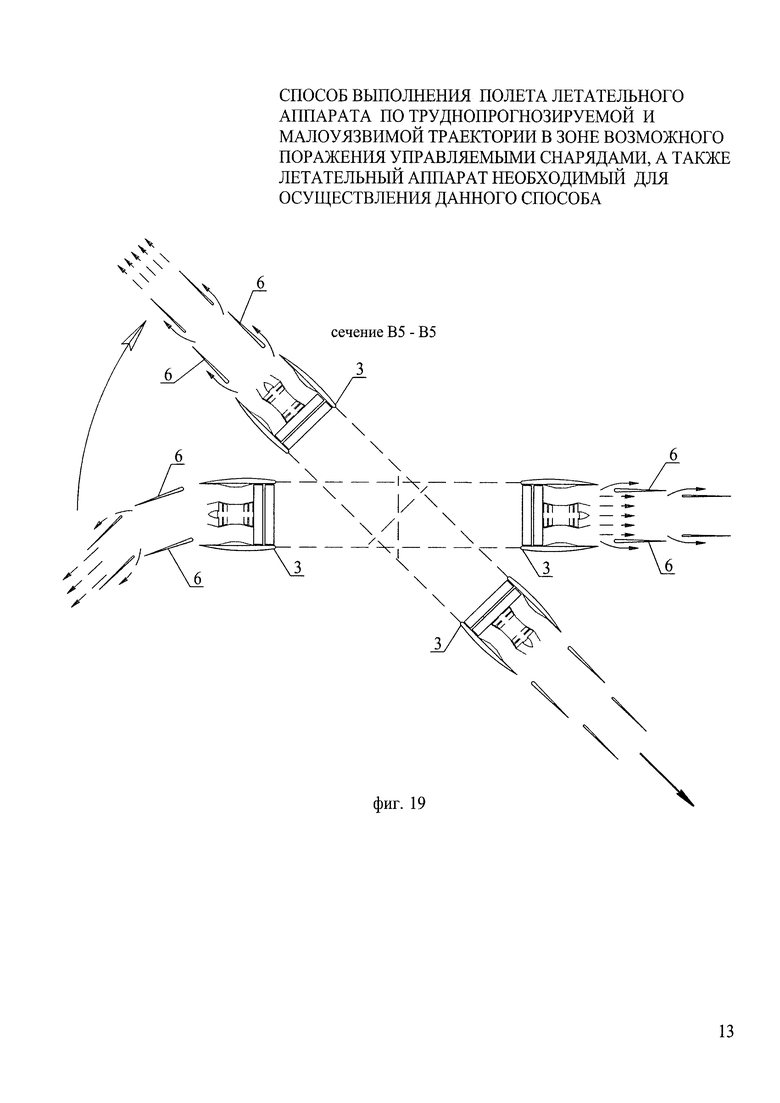
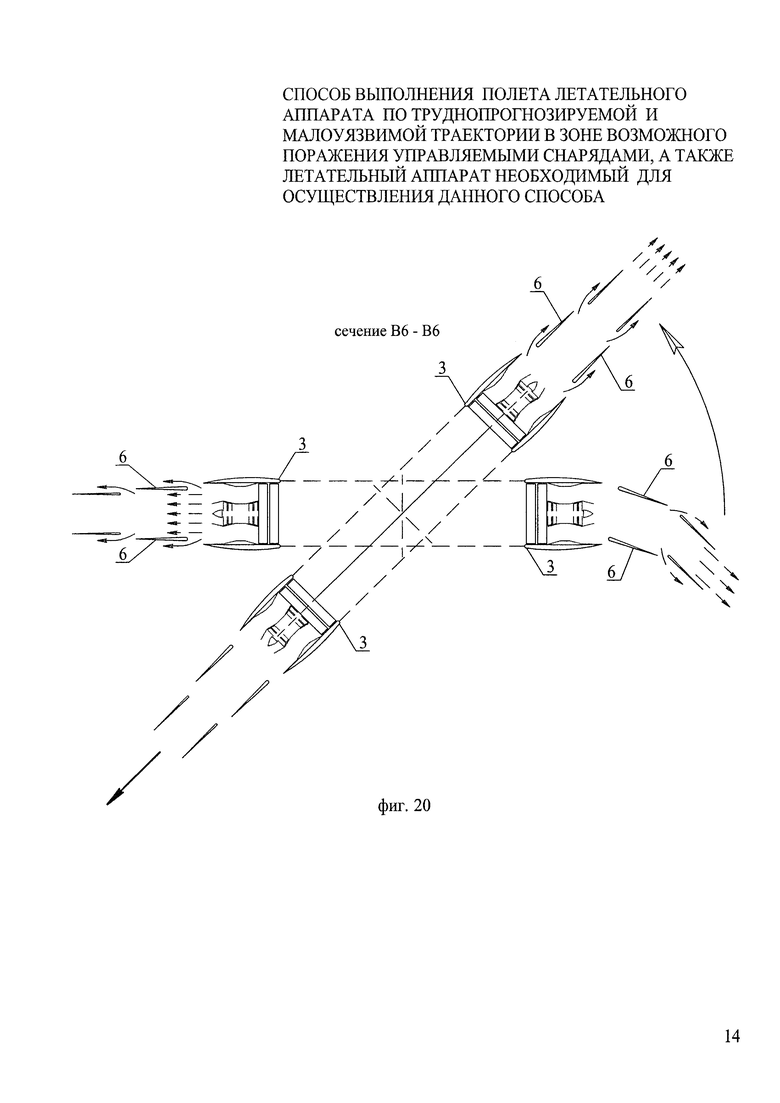
на фиг. 19, 20 - сечение В5-В5, В6-В6 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном снижении летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
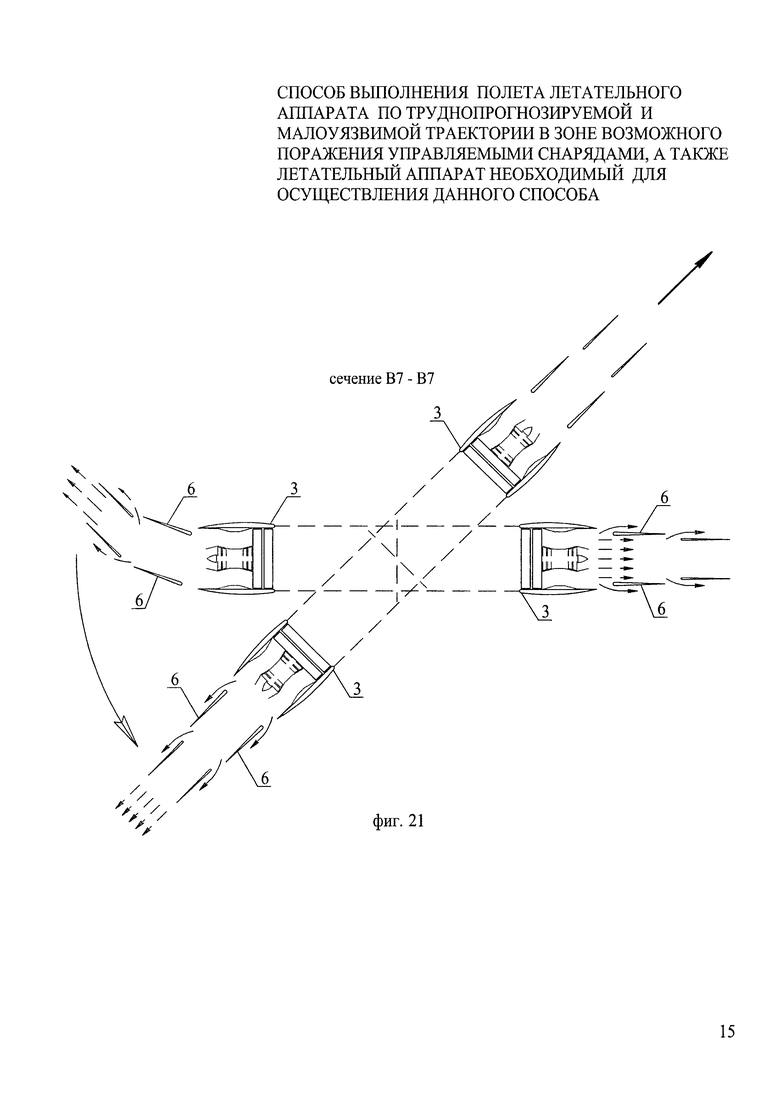
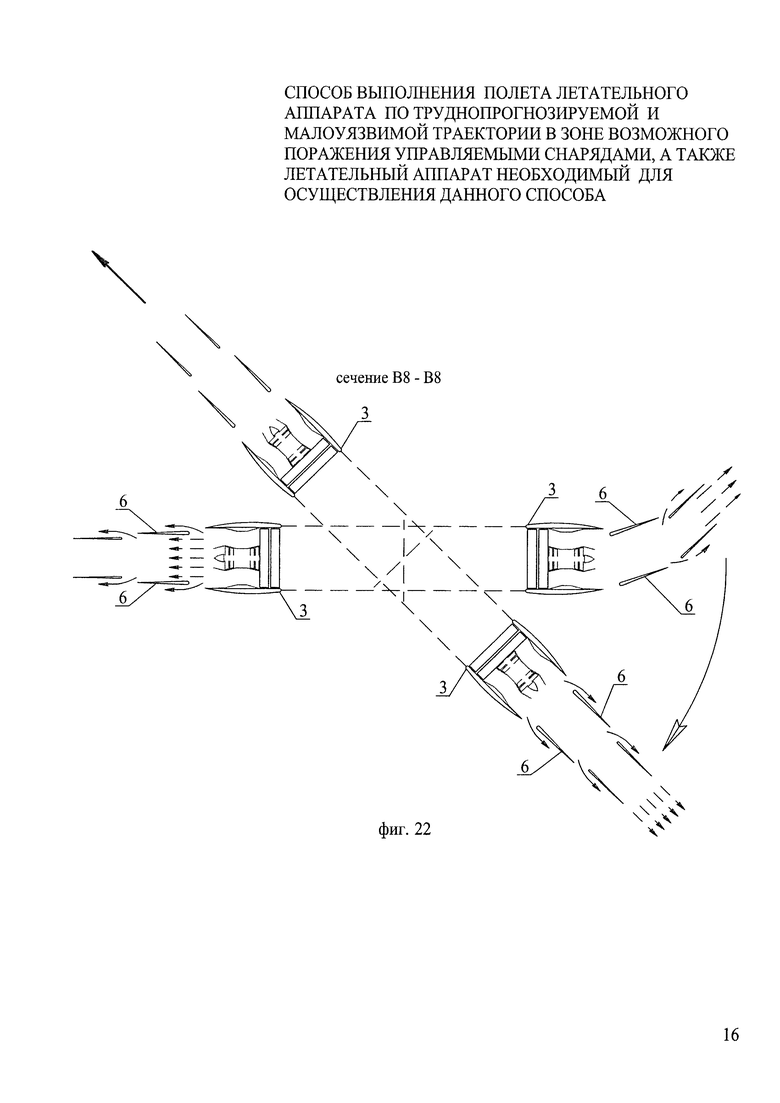
на фиг. 21, 22 - сечение В7-В7, В8-В8 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном подъеме летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде двурядного расположения поворотных плоскостей со щелевым расположением между собой;
на фиг. 23 - сечение А5-А5 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 24 - сечение А6-А6 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 25 - сечение А7-А7 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 26 - сечение С1-С1 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 27, 28 - сечение С2-С2, сечение С3-С3 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 29 - сечение С4-С4 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
на фиг. 30, 31 - сечение С5-С5, С6-С6 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном снижении летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
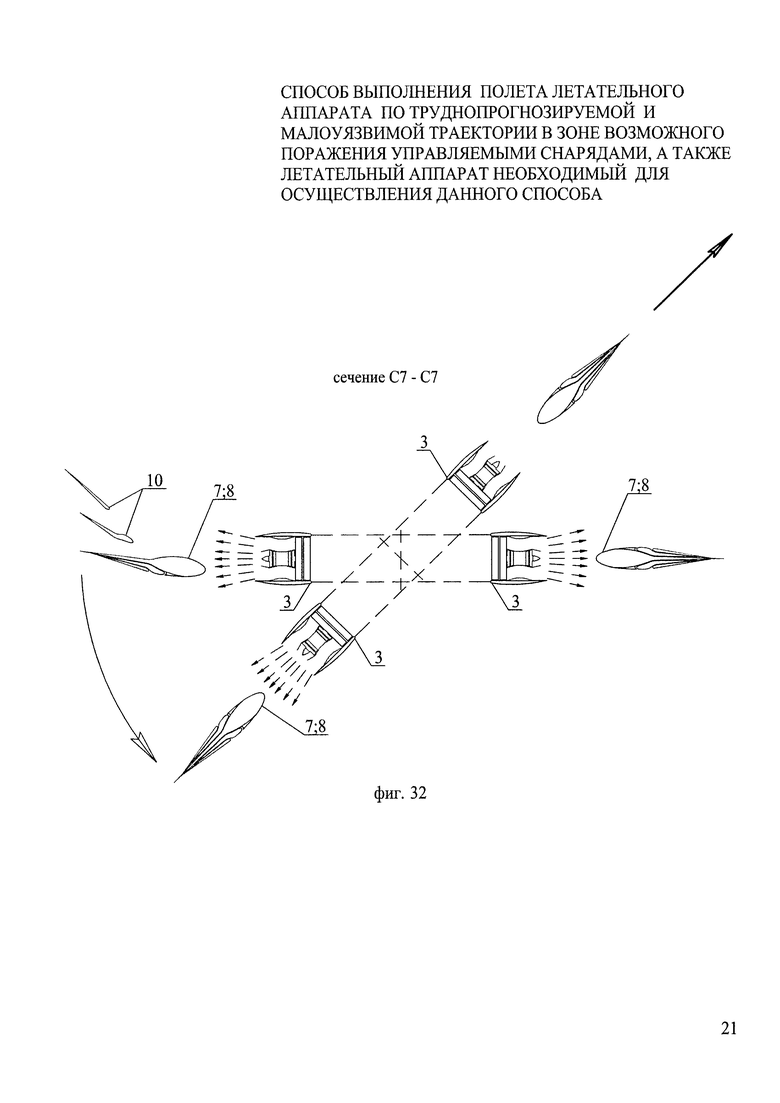
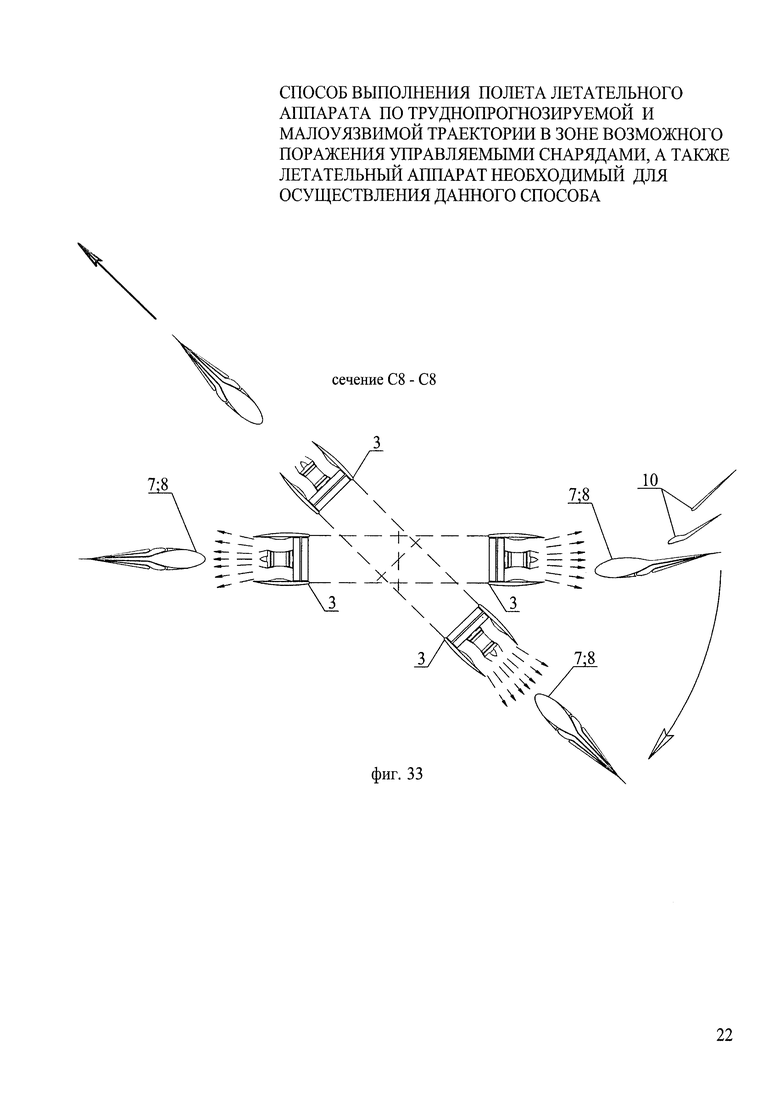
на фиг. 32, 33 - сечение С7-С7, С8-С8 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном подъеме летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде трансформируемого многопланного крыла;
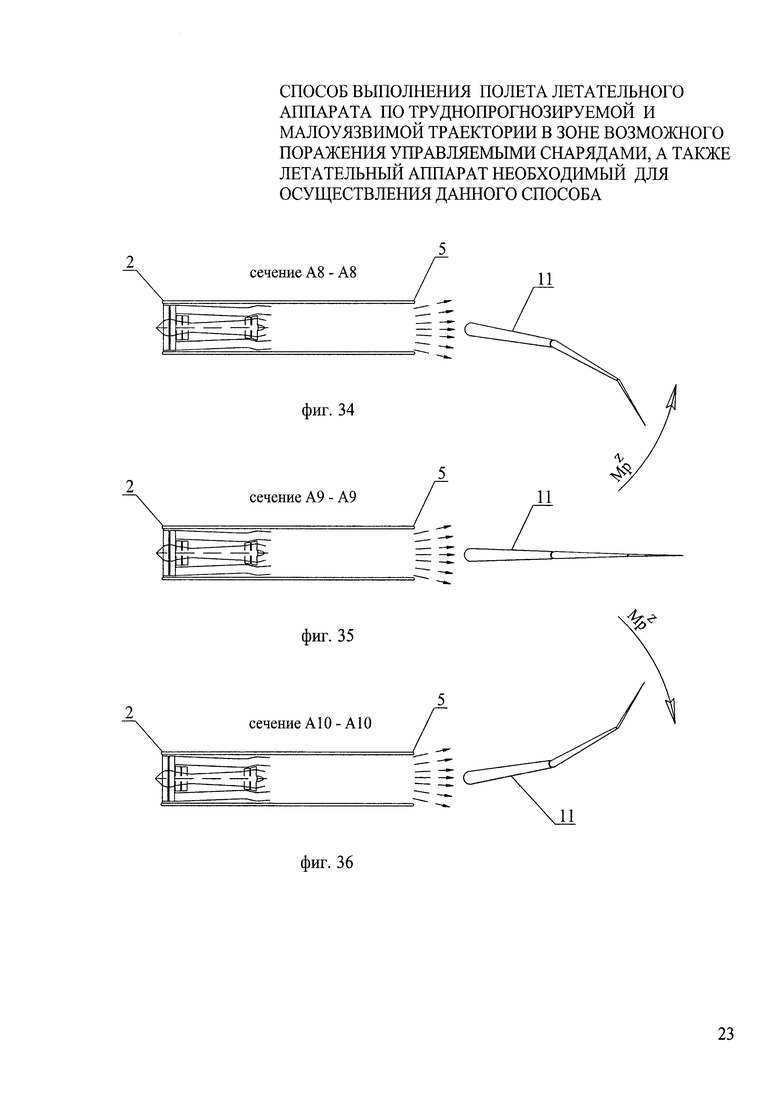
на фиг. 34 - сечение А8-А8 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
на фиг. 35 - сечение А9-А9 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей; на
фиг. 36 - сечение А10-А10 по реактивным маршевым двигателям ТРДД по боковым соплам с ИВТ в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
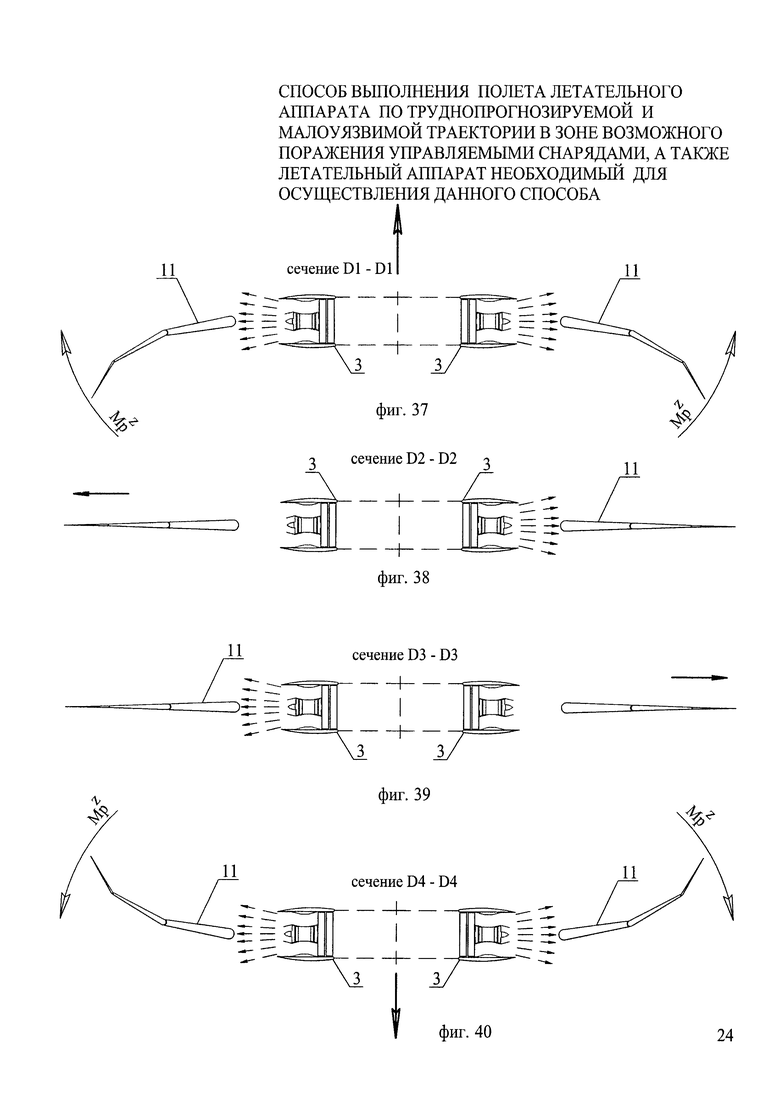
на фиг. 37 - сечение D1-D1 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания подъемного вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
на фиг. 38, 39 - сечение D2-D2, сечение D3-D3 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевой тяги, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
на фиг. 40 - сечение D4-D4 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания снижающего вертикального реактивного момента, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
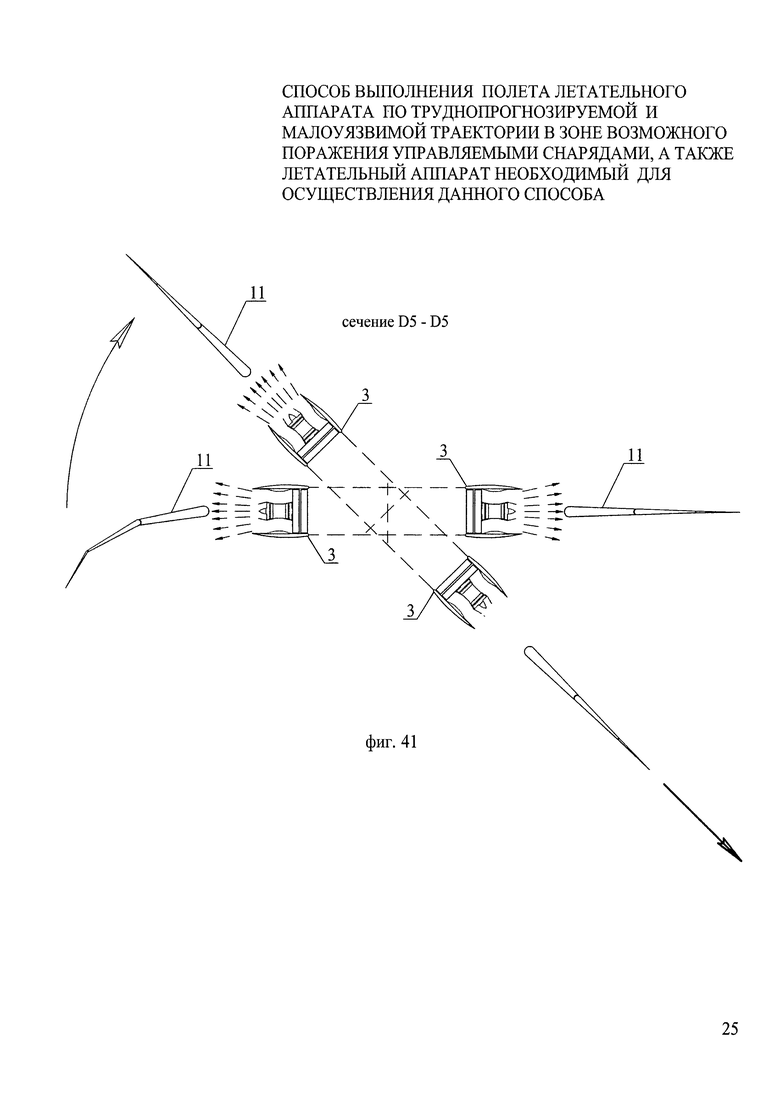
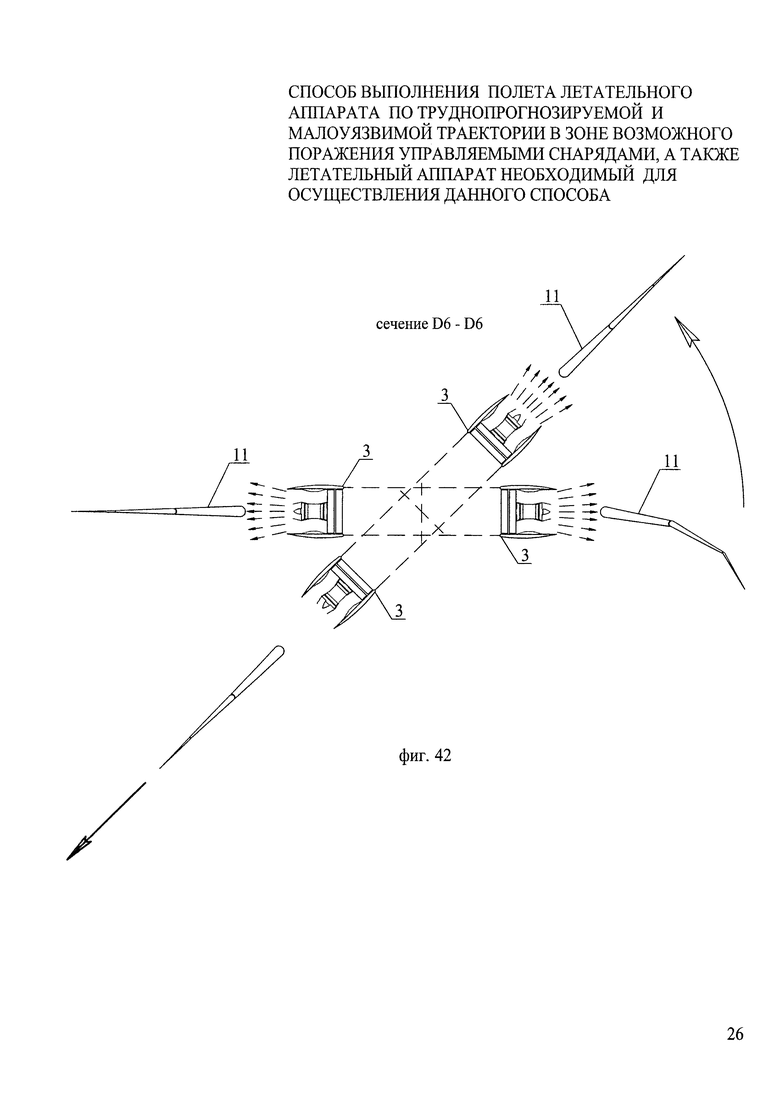
на фиг. 41, 42 - сечение D5-D5, D6-D6 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном снижении летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей;
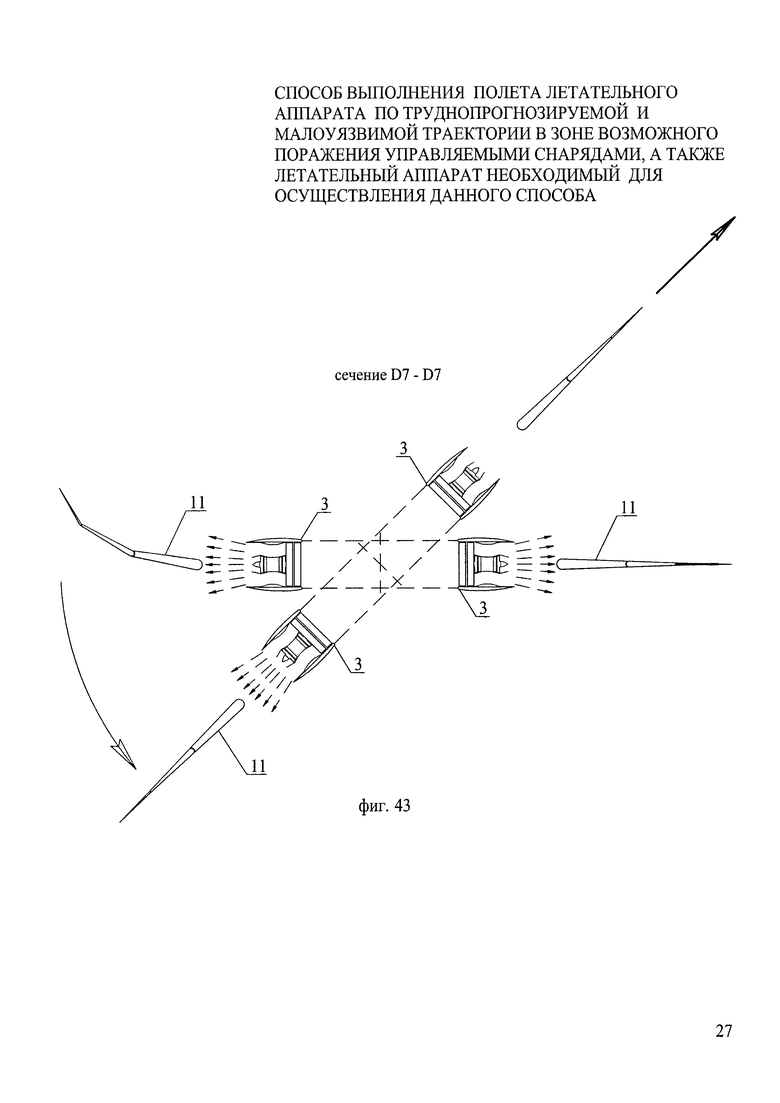
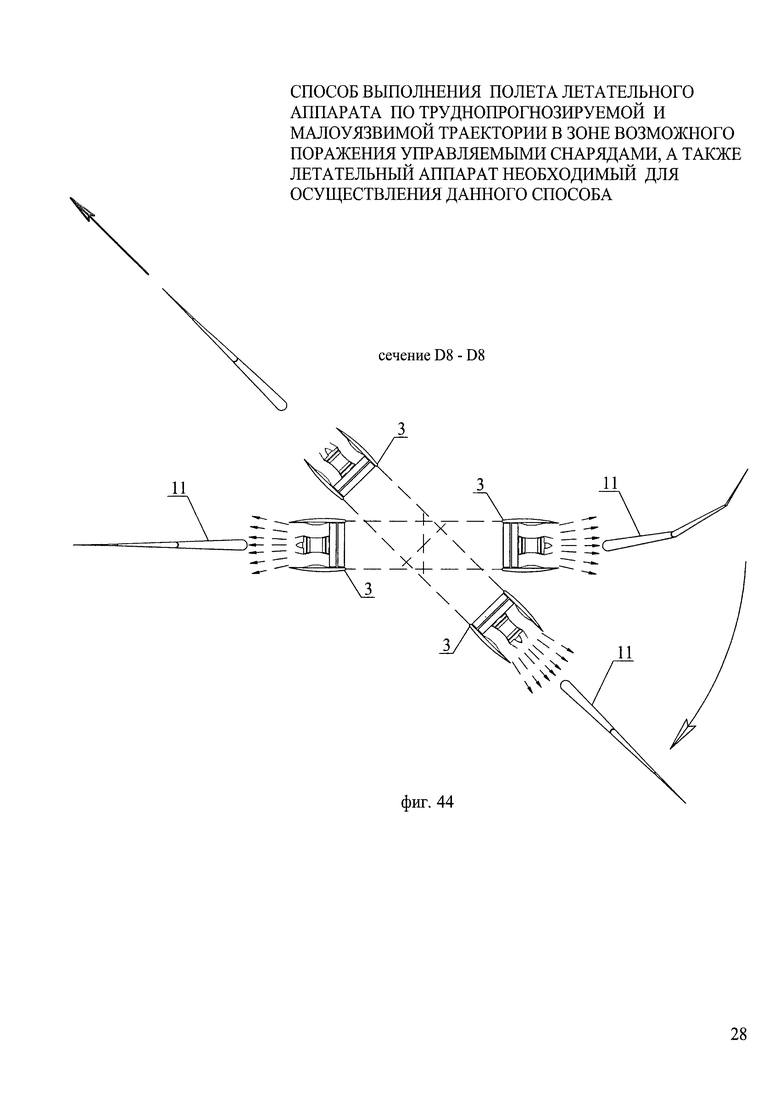
на фиг. 43, 44 - сечение D7-D7, D8-D8 по боковым реактивным двигателям ТРДД по соплам с ИВТ расположенных на периметре дискообразного фюзеляжа в режиме создания осевого тягового усилия при диагональном подъеме летательного аппарата в плоскости перпендикулярной направлению продольного полета летательного аппарата, при этом поворотная часть сопла для изменения вектора тяги выполнена в виде шарнирных поворотных плоскостей.
Изобретение относится к области авиации, в частности к высокоманевренным летательным аппаратам с реактивными двигателями. Способ полета летательного аппарата с интегрированной системой управления по труднопредсказуемой и малоуязвимой траектории заключается в том, что в режиме маневрирования для изменения положения летательного аппарата в пространстве производят согласованное испускание реактивной струи из сопел с ИВТ, создают пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата. Реактивный высокоманевренный летательный аппарат включает фюзеляж, крылья с элементами механизации, систему управления, силовую установку из реактивных двигателей с выходными соплами, расположенными на периметре дискообразного фюзеляжа либо на боковых консолях фюзеляжа. По боковым сторонам передней части фюзеляжа расположены реактивные двигатели с возможностью поворота вокруг вертикальной оси и изменением вектора тяги (ИВТ). Маршевый двигатель в хвостовой части фюзеляжа имеет центральное сопло и одно либо группу боковых сопел с ИВТ. Обеспечивается повышение маневренности высокоскоростного летательного аппарата. 2 н.п. ф-лы, 44 ил.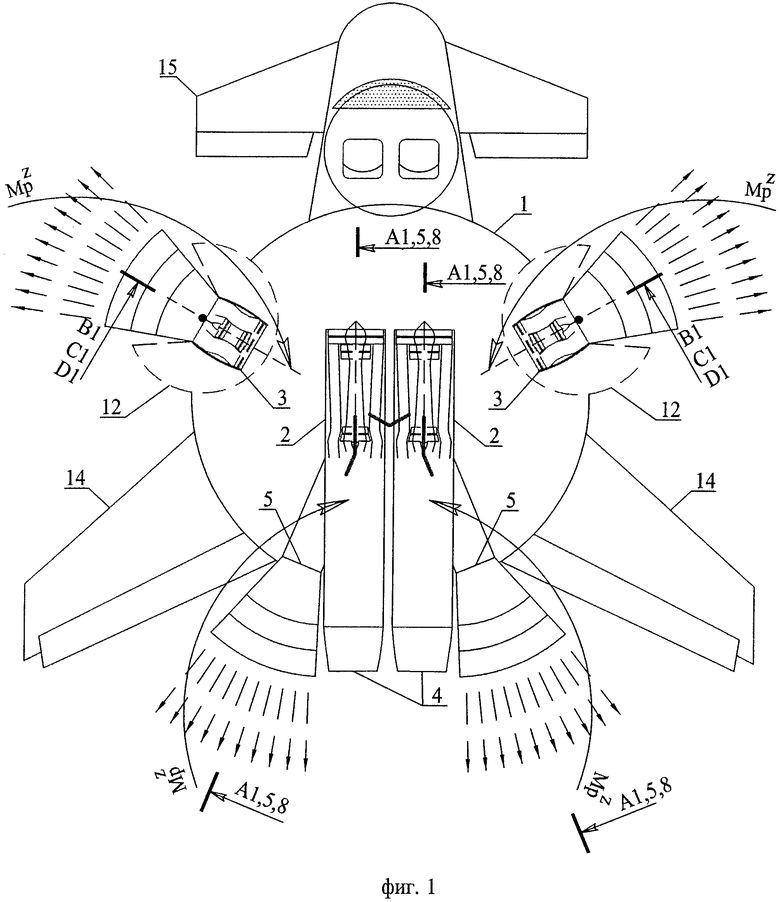
1. Способ полета летательного аппарата с интегрированной системой управления по труднопредсказуемой и малоуязвимой траектории, при котором используют один либо несколько реактивных двигателей с выхлопными соплами как минимум в трех направлениях относительно центра тяжести летательного аппарата с изменяемым вектором тяги (ИВТ), которые расположены на периметре дискообразного фюзеляжа либо на боковых несущих консолях сигарообразного фюзеляжа, заключающийся в том, что в режиме малоуязвимого маневрирования для непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел с ИВТ создают пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата.
2. Реактивный высокоманевренный летательный аппарат, включающий фюзеляж, крылья с элементами механизации, интегрированную систему управления, силовую установку из ракетных двигателей с выходными соплами, расположенными на периметре дискообразного фюзеляжа либо на боковых несущих консолях сигарообразного фюзеляжа, отличающийся тем, что по боковым сторонам передней части фюзеляжа расположены реактивные двигатели с возможностью поворота вокруг вертикальной оси, при этом сопла на боковых реактивных двигателях имеют изменяемый вектор тяги (ИВТ), при этом реактивный летательный аппарат имеет один либо два маршевых реактивных двигателя в хвостовой части фюзеляжа, при этом каждый маршевый двигатель имеет центральное маршевое сопло и одно либо группу боковых сопел с ИВТ, при этом в режиме малоуязвимого маневрирования для непредсказуемого изменения положения летательного аппарата в пространстве путем согласованного испускания реактивной струи из сопел боковых реактивных двигателей с ИВТ, а также из боковых сопел с ИВТ от маршевых реактивных двигателей создается пространственное воздействие вертикальных реактивных моментов, а также осевых тяговых усилий на летательный аппарат, которое приводит к резкому изменению траектории полета по высоте, по горизонтали и по диагонали, в плоскости поперек направления продольного полета летательного аппарата.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 1995 |
|
RU2095283C1 |
| Способ маневрирования высокоскоростного беспилотного летательного аппарата в зоне возможного действия средств противоракетной и противовоздушной обороны | 2016 |
|
RU2634659C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ МАНЕВРЕННЫМ САМОЛЕТОМ | 1996 |
|
RU2099244C1 |
| WO 2003057561 A2, 17.07.2003 | |||
| US 3614034 A1, 19.10.1971. | |||

