Изобретение относится к механизмам для воспроизведения кривых, описываемых аналитическими связями.
Известен механизм для огибания эллипса [1]. Недостатком такого механизма является невозможность воспроизведения пространственной кривой, так как механизм выполняется плоским.
Наиболее близким к заявляемому является рычажный механизм SU №655848, кл. F16H 21/48 от 9.04.1979 г. [2], включающий кривошип, шатун, коромысло и элемент, воспроизводящий кривую.
В этом механизме шарнир, связывающий кривошип с шатуном, выполнен сферическим, а механизм снабжен дополнительным шарниром, соединяющим шатун с коромыслом, ось которого расположена в плоскости вращения коромысла, и элементом воспроизведения кривой, выполненным в виде жестко связанного с шатуном стержня, с размещенным в плоскости, проходящей через центр сферического и ось дополнительного шарниров.
Недостатком этого устройства является невозможность воспроизведения симметричной кривой вследствие выполнения шарнира кривошипа цилиндрическим.
Задачей изобретения является создание такого механизма, который позволяет воспроизводить любые пространственные кривые.
Сущность предлагаемого устройства заключается в том, что в механизме для воспроизведения пространственных кривых, включающем кривошип, шатун, коромысло и элемент, воспроизводящий кривую, шатун выполнен в виде винта, взаимодействующего с гайкой, при этом гайка образует с коромыслом вращательную кинематическую пару, а элемент, воспроизводящий кривую, соединен с гайкой за одно целое.
На чертеже изображен механизм для воспроизведения пространственных кривых. Механизм состоит из четырех подвижных звеньев: кривошипа 1, шатуна 2, гайки 3, коромысла 4 и элемента 5, воспроизводящего пространственную кривую, прикрепленного к гайке 3. Кривошип 1 образует со стойкой O1 вращательную кинематическую пару V класса, шатун 2 образует с кривошипом 1 вращательную кинематическую пару V класса, гайка 3 образует с шатуном 2 винтовую кинематическую пару V класса, коромысло 4 образует с гайкой 3 вращательную кинематическую пару V класса, коромысло 4 образует со стойкой O2 вращательную кинематическую пару V класса. Таким образом, в механизме используется 4 подвижных звена (n=4) и 5 кинематических пар V класса (р5=5). Подвижность механизма определится [3]:
W=4n-3p5=4·4-3·5=16-15=1.
Работает механизм следующим образом. Если задавать движение кривошипу 1, шатун 2 начнет вкручиваться в гайку 3, тем самым приводя ее в движение. При этом длина шатуна 2 начнет изменяться. Элемент 5, воспроизводящий пространственную кривую, присоединенный к гайке 3, будет двигаться по сложной траектории, описывая пространственную кривую.
Источники информации
1. Артоболевский И.И. Механизмы в современной технике, т.2, с.85 и далее 1046-кулисно-рычажный механизм для огибания эллипсов. Изд-во «Наука», 1971.
2. SU №655848, кл. F16H 21/48 от 9.04.1979 г.
3. Артоболевский И.И. Теория механизмов. Изд-во "Наука", 1965, с.85.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655120C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| Шарнирно-рычажный механизм с регулируемой длиной звеньев | 2017 |
|
RU2655568C1 |
| МЕХАНИЗМ ПОССЕЛЬЕ-ЛИПКИНА С ВЫХОДНЫМ РАБОЧИМ ЗВЕНОМ | 2020 |
|
RU2750344C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ ЗАХВАТА, УДЕРЖАНИЯ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 2018 |
|
RU2689270C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
Изобретение относится к механизмам для воспроизведения кривых, описываемых аналитическими связями. Механизм для воспроизведения пространственной кривой включает кривошип, шатун, выполненный в виде винта, взаимодействующего с гайкой. Гайка образует с коромыслом вращательную кинематическую пару. Элемент, воспроизводящий кривую, соединен с гайкой за одно целое. Техническим результатом является расширение функциональных возможностей. 1 ил.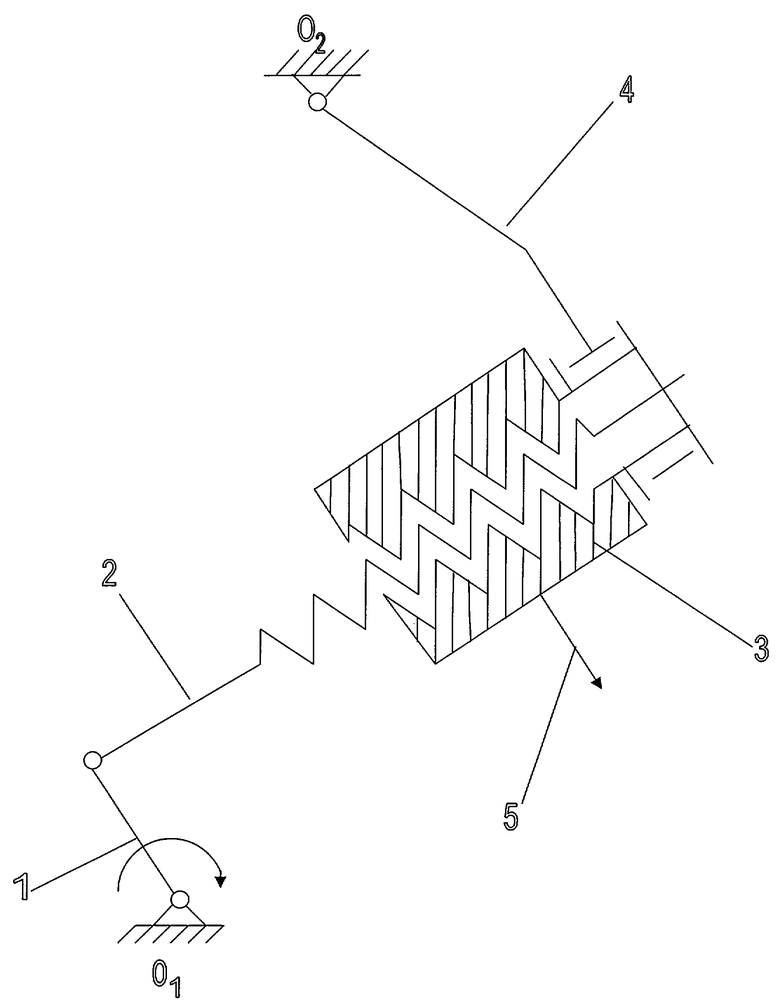
Механизм для воспроизведения пространственных кривых, включающий кривошип, шатун, коромысло и элемент, воспроизводящий кривую, отличающийся тем, что шатун выполнен в виде винта, взаимодействующего с гайкой, при этом гайка образует с коромыслом вращательную кинематическую пару, а элемент, воспроизводящий кривую, соединен с гайкой за одно целое.
| Рычажный механизм | 1977 |
|
SU655848A1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике, т.2, изд | |||
| "Наука", 1971, с.85 | |||
| Прибор для вычерчивания кривых | 1985 |
|
SU1253834A1 |
| DE 2052861 A1, 04.11.1971. | |||

